
A Data-thrifty Approach to Routing Optimization
Thomas Fayolle, Renaud de Landtsheer, Gustavo Ospina and Fabian Germeau
CETIC Research Centre, Charleroi, Belgium
Keywords:
Local Search, PDPTW, Data, Routing Optimization, OscaR, Cbls.
Abstract:
Solving a routing optimisation problem often requires to know the travel times between each pair of points of
the problem. Usually, when solving a routing optimisation problem, the travel time is assumed to be constant.
However, in real life problems, it can vary a lot due to traffic jams, especially near big cities. Some map data
providers can provide accurate travel time estimations, but the data are expensive and querying such a data
provider is time consuming. In this paper, we present a method to solve the Pickup and Delivery Problem with
Time Windows (PDPTW) that reduces the number of calls to paid data providers while preserving the quality
of the solution.
1 INTRODUCTION
Given a set of pickup points and, for each pickup
point, an associated delivery point, solving the Pickup
and Delivery Problem (PDP) (Toth and Vigo, 2014)
consists in finding the shortest path that serves all the
pickup and the delivery points. The pickup point and
its associated delivery point must be served in that or-
der by the same vehicle. In the Pickup and Delivery
Problem with Time Windows (PDPTW), a time win-
dow can be associated to each pickup point and each
delivery point: the point must be served before the
latest time of the time window and it can be reached
before the earliest time of the time window, but in that
case the vehicle must wait until the earliest time be-
fore leaving.
Solving the PDPTW requires to know the travel
times between each pair of points. In the classical ver-
sion of the problem, the travel times are often given
as a matrix of constant values representing the travel
times between each pair of points. However, in real
life problems, travel times may significantly change
depending on the time of the day, especially near big
cities. This problem is not new and has been defined
in the most general form of Vehicle Routing Problem
by (Malandraki and Daskin, 1992). This paper and
many others that propose solutions for Time Depen-
dent Vehicle Routing Problem variants assume that
the time-dependent travel time is known when the op-
timization starts.
Unfortunately, the data representing the travel
throughout the day is a very large histogram. The eas-
iest solution is to buy those data from a map provider,
as main map data providers include accurate travel
times that take traffic into account. The problem with
map providers is that they are financially expensive
and computationally slow. For instance, getting a
100x100 data matrix for every 30 minutes of the day
costs hundreds of euros and takes more than an hour.
On the other side, free data providers (e.g. Open-
StreetMap (OpenStreetMap, 2004)) combined with
source free path finding algorithms (e.g. (Luxen and
Vetter, 2011) or (GraphHopper, 2018)) can provide
travel times without taking traffic into account.
In this paper, we introduce a method that uses ap-
proximated data and a local search engine in order to
solve a PDPTW while reducing the amount of data
that is needed to perform the optimization. The ap-
proach is to repeatedly perform optimization on ap-
proximate data that are both cheap and fast to obtain.
This optimization leads to a route and high-quality
data is queried only for the travels belonging to this
route. The approximate data is then corrected with a
high-quality data that takes traffic into account. The
process is started again until the generated route only
contains high quality data. The method has been ap-
plied to a real life PDPTW problem with real life data.
In this example, it was able to significantly reduce the
amount of data used while preserving the quality of
the solution, the downside being that the optimization
–so far– seems much slower with our approach.
Fayolle, T., De Landtsheer, R., Ospina, G. and Germeau, F.
A Data-thrifty Approach to Routing Optimization.
DOI: 10.5220/0010308504330437
In Proceedings of the 10th International Conference on Operations Research and Enter prise Systems (ICORES 2021), pages 433-437
ISBN: 978-989-758-485-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
433

2 RELATED WORKS
In a survey on vehicle routing problems for city lo-
gistics, (Cattaruzza et al., 2017) identify four main
challenges in the optimization of vehicle routes in ur-
ban area. One of the challenges is the optimization
with time-dependent travel times. They conclude that
“considering time-dependent travel times is essential
when solving VRP in cities” and that it should “be-
come a must-have attribute in the future”.
Effectively, (Donati et al., 2008) compute solu-
tions to a PDP using constant travel time on one hand
and time-dependent travel time on the other hand.
Then they evaluated the solution computed with con-
stant travel time in the context of time dependent
travel time. They show that approximating traffic-
dependent travel time through constant travel time de-
livers a solution roughly 8% worse (up to 12%) than
if the problem was solved with accurate data.
In their paper, (Sun et al., 2018) solve PDPTW
with time-dependent travel times using a branch and
price algorithm that give an exact solution. Like many
papers that address a VRP with time-dependent travel
times, they assume that the travel time function is
known at the beginning of the route optimization.
To the best of our knowledge, we do not know any
paper that solves a Vehicle Routing Problem while
facing the lack of accurate data.
3 OPTIMIZATION WITH
(UNDER-)APPROXIMATED
DATA
This section presents our approach. Section 3.1
presents the requirements that shall be fulfilled by
the method, section 3.2 presents an overview of the
method and sections 3.3 and 3.4 discuss the effect of
data enrichment methods and stop conditions on the
approach.
3.1 Requirements
The method aims at solving a routing optimization
problem while respecting two main requirements: (1)
the method shall reduce the amount of traffic-aware
data compared to an approach requiring the com-
plete information prior to the optimization and (2) the
method shall find a solution that is as good as the so-
lution found when knowing all the data.
The method presented in section 3.2 repeatedly
uses a routing optimization engine. In the exam-
ple detailed in section 4, the local search engine Os-
caR.cbls (OscaR Team, 2012) has been used. Thus,
getting the optimal solution is not guaranteed, but re-
quirement (2) means that the search method presented
in this paper should not give a worse solution than a
solution obtained with the same routing optimization
engine and all the needed data.
3.2 Overview of the Method
The whole process of the search method is depicted
in Figure 1.
The search starts with an under-approximated
time matrix. Such a matrix is obtained using a free
map provider and open source path finding algorithm.
The travel times obtained using this method do not
take traffic data into account. We assume that the real
travel time is greater or equal to the travel time com-
puted this way. The method is based on the assump-
tion that the use of an under-approximated time ma-
trix guarantees the requirement (2). The idea behind
this assumption is that an under-approximated travel
time makes time windows constraints more permis-
sive; any solution of the problem that is acceptable
wrt. the strong constraints with a real travel time data
shall be accepted with the under-approximated time.
One of the purpose of the experimentation presented
in section 4 is to test if this claim is reasonable.
The under-approximated time matrix is used in
a local search engine to obtain a solution, which is
computed using approximated travel time. In order to
have a more accurate solution, the travel times of this
solution are updated using a high-quality data. Af-
ter the update, the solution has significantly changed,
and may even not be feasible (for example because
some time window constraint is not respected any-
more). However, updating the solution gives us more
information about the travel times. The new infor-
mation can be used to enrich the knowledge about the
travel times. Several solutions for the enrichment pro-
cess are presented in section 3.3.
After enriching the knowledge, a new search can
be launched. Since now we have more data, this
search will find either a different solution or a solu-
tion with accurate travel times (or more likely an hy-
brid solution with both different and similar parts with
accurate travel times). The new solution is updated
using a paid data provider, the knowledge is enriched,
and a new search begin.
The process is repeated until the solution obtained
from the local search engine is satisfying. The stop-
ping criterion of the search is discussed in section 3.4.
ICORES 2021 - 10th International Conference on Operations Research and Enterprise Systems
434
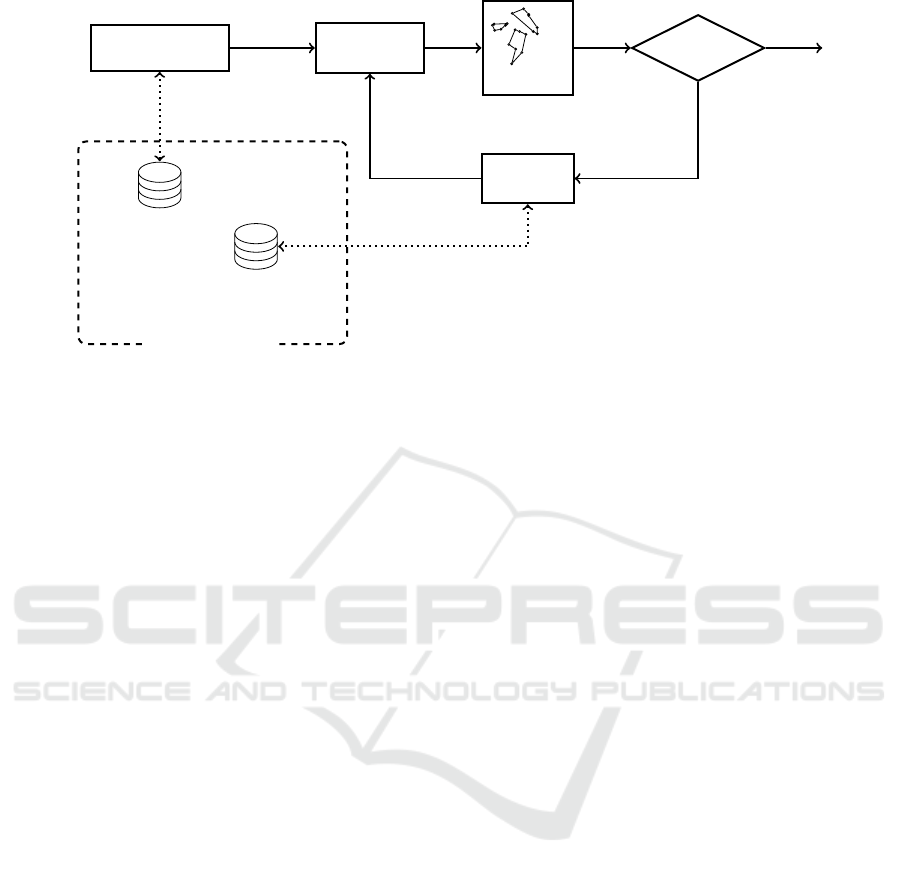
Get Approximate
Data
Free Provider
Paying ProviderPaying Provider
(Accurate Data)
Data Providers
Routing
Optimization
Solution
Stop?
Enrich
knowledge
No
Yes
Figure 1: Solving the PDPTW with approximated travel times.
3.3 Enriching the Knowledge
When a solution is obtained after a local search, the
data are enriched with a paying provider, in order to
have the accurate travel times for that solution. The
new data obtained from the paying provider can be
used to enrich the knowledge. The most naive idea
to enrich the knowledge is to store the data received
from the paying provider in order to use the real data
the next time the travel time is needed in the same
hour. In less naive versions, the data can be used to
get a better approximation of the travel time on other
points of the problem: we can propose landmark-
based and learning-based approaches.
Algorithms like landmarks (Goldberg and Harrel-
son, 2003) can further improve the quality of the ap-
proximate data by performing data extrapolations. It
uses the triangle inequality to deduce sound under-
approximate travel time out of known high-quality
travel times. This idea is that given the distance from
a landmark L to point A and a point B, we know that
(A → B) ≥ (L → A) − (L → B) so (L → A) − (L →
B) is an under approximation of A → B. Since the
landmark generates under-approximated values, they
should preserve the quality of the solution. On the
other side, the under-approximation may be really low
(0 if L is equidistant from A and B)
Data learning methods could be used too to get
a better approximation than the travel time without
traffic data. Since the search is started with a bet-
ter approximation, it should take a smaller number
of iterations and thus less time to arrive to a solu-
tion that is computed with real travel time, but learn-
ing methods do not guarantee to provide sound under-
approximated values and the impact on the quality of
the solution should be leveraged.
3.4 Stop Condition
The stop condition can affect the computation time
and the quality of the solution. The strongest stop
condition will be to verify that the solution only relies
on exact travel time data. Weaker conditions could be
used, like checking that the solution is still feasible
after updating the travel times. As usual when using
meta-heuristics, there is a trade-off between computa-
tion time and solution quality. This trade-off usually
depends on the problem specific situation where the
tool has to be implemented.
4 PRELIMINARY RESULTS
In order to verify the claim that the method presented
in section 3 fulfills the requirements introduced in the
same section, it has been applied on a PDPTW prob-
lem. In this section, we present the problem on which
it has been applied and the preliminary results ob-
tained.
4.1 Benchmark Settings
The PDPTW on which the method has been applied
contains real GPS positions around Brussels, Bel-
gium. It is a shared cab problem, which has about
300 nodes within 98 different geographic locations.
Among the 300 nodes, 14 are vehicle depots; each
vehicle has a capacity that should not be exceeded.
Since it is a pickup and delivery problem, the pickup
node and the delivery shall be served in that order (the
pickup node before the delivery node) and shall be
served by the same vehicle.
A Data-thrifty Approach to Routing Optimization
435

Statistics (mean on 10 runs)
Objective Time
1
Iteration Free Provider calls Paying Provider calls
Entire Matrix 104 051 534 5’02” - 9 604 451 388
Request when needed 104 429 079 3’28” - 9 604 18 483
Search with approximation 101 848 245 49’12” 10,9 9 604 662
1
Since the API is simulated, this time does not take into account the time required to get the data from the map provider
Figure 2: Benchmark results.
A time window is associated to each node. The
latest time of the time window is a strong constraint:
the solution cannot be accepted if the node is served
after the latest time of the time window. The earliest
time of the time window is not a constraint that can be
used to reject a solution. However, if a vehicle reaches
a node before the earliest time of the time window, it
shall not leave the node before the earliest time of the
time window. The objective function is the length of
the route (in meters) plus a penalty for the unrouted
nodes.
4.2 The Results
The main purpose of the example described here is
to verify if the method presented in section 3 reduces
the number of calls to a paid data provider and does
not deteriorate the value of the objective function. A
real travel time function matrix has been acquired to
a paid map provider. For each pair of points in the
98 points of the problem, the travel time is asked for
each 30 minutes in the clock of the day (this means we
have 98*98*48 = 460 992 travel times). As a cost and
computation time indication, getting the travel times
costed about 200C and took about 20 hours. The use
of asynchronous calls to the API could reduce this
time to a time between 1 or 2 hours.
With this data, we simulated the map provider
API. The number of calls to the simulated provider
is recorded during the search. The search with ap-
proximation is compared with two different methods.
In the first method, the entire data matrix is asked to
the provider. The problem is solved using the entire
matrix. In the second method, the map provider is
called each time a travel time is needed. The search
with approximation is used without a smart enrich-
ment method: when the travel time is requested to the
map provider, it is stored; in further local searches,
the real travel time for a given departure time is used
if it is already known and the travel time at midnight
is used otherwise. The stop condition is strong: the
solution is considered satisfying if the arrival times at
each point of the solution are exactly the same before
getting the real times and after getting the real times.
In other words, the solution is considered as satisfy-
ing if it has been calculated only with real travel times.
For each method, the solution is found using the Very
Large-Scale Neighborhood (VLSN) (Mouthuy et al.,
2011) implemented in the local search framework Os-
caR.cbls.
The results are shown in the table in Figure 2. The
figures in this table are the average figures of 10 runs.
The first column contains the value of the objective
function for each method. The value of the objective
function is almost identical for the first two methods,
and is a bit better with the search with approxima-
tion. As local search engines may fall into a local
minimum, one of the easiest meta-heuristics used to
escape local minima is to restart the search after per-
turbing the solution. This is what is (involuntarily)
done in the search with approximation, and it could
explain why the objective is better.
The second column contains the run time for ev-
ery method. The third column contains the number
of time the loop of Figure 1 is run. The search with
approximation takes significantly more time than the
two other methods. It is explained by the fact that it
requires more than 10 iterations of local search on av-
erage where the two other methods only require one
local search. However, the API of the map provider is
simulated, and it does not consider the time required
to request and receive the data from the map provider.
The last column contains the number of API calls.
The calls are separated between the calls for the travel
time at midnight and the calls for the travel time at
other time of the day. The calls at midnight are con-
sidered as free: they can be acquired from a free
data provider. This number is identical, no matter the
method. But the number of calls to a paid provider
is significantly reduced when using the search with
approximation: only 3.58% of the calls needed for
the second method are needed for the search with ap-
proximation. On the provider from which we got the
data for this benchmark, it represents a cost of about
0.25C, instead of about 6.7C for the second method
and about 200C for the first method.
ICORES 2021 - 10th International Conference on Operations Research and Enterprise Systems
436

5 CONCLUSION AND FUTURE
WORK
In this paper, we presented a method to solve a
PDPTW with approximated data that reduces the need
for accurate data from a paid provider. The appli-
cation of the method on an example shows that it
allows to significantly reduce the need for data and
that the solution obtained is not worse than a solution
obtained with a full access to the data, even though
this result should be consolidated by giving the same
search time to both method.
The development of the method is an ongoing
work and a there is more to be done. Firstly, the run
time is quite high. This is due to the number of iter-
ations that are needed to obtain a solution computed
with only exact travel times. In the example presented
in this paper, when the travel time is not known, it is
approximated by the time without traffic information,
which can be a bad approximation. Using a better ap-
proximation should reduce the number of iterations.
Approximation using landmarks and learning meth-
ods are mentioned in the paper and should be experi-
mented.
Secondly, the method has been tested with a sim-
ulated API which makes the presented example rather
theoretical. The access to the data is immediate and
there is no network access problem. The method
should be tested with a real API in order to leverage
the impact of getting data from a real web service.
Finally, the results presented here have been ac-
quired with one example and one data set. This data
set is a particular set of points and does not allow to
compare the results with state-of-the-art results. More
examples should be tested in order to validate the con-
clusions of the paper.
ACKNOWLEDGEMENTS
This research was supported by the SAMOBIGrow
CWALITY research project from the Walloon Region
of Belgium (nr. 1910032).
REFERENCES
Cattaruzza, D., Absi, N., Feillet, D., and Gonz
´
alez-Feliu,
J. (2017). Vehicle routing problems for city logis-
tics. EURO Journal on Transportation and Logistics,
6(1):51 – 79.
Donati, A. V., Montemanni, R., Casagrande, N., Rizzoli,
A. E., and Gambardella, L. M. (2008). Time depen-
dent vehicle routing problem with a multi ant colony
system. European Journal of Operational Research,
185(3):1174 – 1191.
Goldberg, A. and Harrelson, C. (2003). Computing the
shortest path: A* search meets graph theory. Proceed-
ings of the Annual ACM-SIAM Symposium on Discrete
Algorithms.
GraphHopper (2018). https://www.graphhopper.com.
Luxen, D. and Vetter, C. (2011). Real-time routing with
OpenStreetMap data. In GIS: Proceedings of the ACM
International Symposium on Advances in Geographic
Information Systems, pages 513–516.
Malandraki, C. and Daskin, M. S. (1992). Time depen-
dent vehicle routing problems: Formulations, proper-
ties and heuristic algorithms. Transportation Science,
26(3):185–200.
Mouthuy, S., Hentenryck, P. V., and Deville, Y.
(2011). Constraint-based very large-scale neighbor-
hood search. Constraints, 17:87–122.
OpenStreetMap (2004).
https://www.openstreetmap.org.
OscaR Team (2012). OscaR : Operational Research
in Scala. Available under the LGPL licence from
https://bitbucket.org/oscarlib/oscar.
Sun, P., Veelenturf, L. P., Hewitt, M., and Van Woensel,
T. (2018). The time-dependent pickup and delivery
problem with time windows. Transportation Research
Part B: Methodological, 116:1 – 24.
Toth, P. and Vigo, D., editors (2014). Vehicle Routing, vol-
ume 18 of MOS-SIAM Series on Optimization. SIAM.
A Data-thrifty Approach to Routing Optimization
437
