
Domain Adaptation for Traffic Density Estimation
Luca Ciampi
1 a
, Carlos Santiago
2 b
, Joao Paulo Costeira
2 c
, Claudio Gennaro
1 d
and Giuseppe Amato
1 e
1
Institute of Information Science and Technologies, National Research Council, Pisa, Italy
2
Instituto Superior T
´
ecnico (LARSyS/IST), Lisbon, Portugal
Keywords:
Unsupervised Domain Adaptation, Domain Adaptation, Synthetic Datasets, Deep
Learning, Deep Learning for Visual Understanding, Counting Vehicles, Traffic Density Estimation,
Convolutional Neural Networks.
Abstract:
Convolutional Neural Networks have produced state-of-the-art results for a multitude of computer vision tasks
under supervised learning. However, the crux of these methods is the need for a massive amount of labeled
data to guarantee that they generalize well to diverse testing scenarios. In many real-world applications, there
is indeed a large domain shift between the distributions of the train (source) and test (target) domains, leading
to a significant drop in performance at inference time. Unsupervised Domain Adaptation (UDA) is a class of
techniques that aims to mitigate this drawback without the need for labeled data in the target domain. This
makes it particularly useful for the tasks in which acquiring new labeled data is very expensive, such as for
semantic and instance segmentation. In this work, we propose an end-to-end CNN-based UDA algorithm
for traffic density estimation and counting, based on adversarial learning in the output space. The density
estimation is one of those tasks requiring per-pixel annotated labels and, therefore, needs a lot of human effort.
We conduct experiments considering different types of domain shifts, and we make publicly available two new
datasets for the vehicle counting task that were also used for our tests. One of them, the Grand Traffic Auto
dataset, is a synthetic collection of images, obtained using the graphical engine of the Grand Theft Auto video
game, automatically annotated with precise per-pixel labels. Experiments show a significant improvement
using our UDA algorithm compared to the model’s performance without domain adaptation. The code, the
models and the datasets are freely available at https://ciampluca.github.io/unsupervised counting.
1 INTRODUCTION
With the advent of Convolutional Neural Networks
(CNNs) (Lecun et al., 1998), supervised learning has
reached excellent results across many Computer Vi-
sion application areas, such as object detection (Red-
mon and Farhadi, 2018) and instance segmentation
(He et al., 2017). However, most CNN-based meth-
ods require a large amount of labeled data and make a
common assumption: the training and testing data are
drawn from the same distribution. The direct trans-
fer of the learned features between different domains
does not work very well because the distributions
are different. Thus, a model trained on one domain,
a
https://orcid.org/0000-0002-6985-0439
b
https://orcid.org/0000-0002-4737-0020
c
https://orcid.org/0000-0001-6769-2935
d
https://orcid.org/0000-0002-3715-149X
e
https://orcid.org/0000-0003-0171-4315
named source, usually experiences a drastic drop in
performance when applied on another domain, named
target. This problem is commonly referred as Domain
Shift (Torralba and Efros, 2011).
Domain Adaptation is a common technique to ad-
dress this problem. It adapts a trained neural network
by fine-tuning it with a new set of labeled data belong-
ing to the new distribution. However, in many real
cases, gathering a further collection of labeled data
is expensive, especially for tasks that imply per-pixel
annotations, like semantic or instance segmentation.
Unsupervised Domain Adaptation (UDA) ad-
dresses the domain shift problem differently. It does
not use labeled data from the target domain and relies
only on supervision in the source domain. Specifi-
cally, UDA takes a source labeled dataset and a target
unlabeled one. The challenge here is to automatically
infer some knowledge from the target data to reduce
the gap between the two domains.
Ciampi, L., Santiago, C., Costeira, J., Gennaro, C. and Amato, G.
Domain Adaptation for Traffic Density Estimation.
DOI: 10.5220/0010303401850195
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
185-195
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
185

∑
25 vehicles
Figure 1: Example of an image with the bounding box anno-
tations (left) and the corresponding density map that sums
up to the counting value (right).
In this work, we consider the counting task, de-
fined as estimating the number of object instances
in still images or video frames (Lempitsky and Zis-
serman, 2010), which has recently attracted signif-
icant attention in the Computer Vision community.
Specifically, we consider the vehicle counting sce-
nario, where the task is to estimate the number of
vehicles occurring in streets, roads, or parking lots.
Most current systems address the counting task as
a supervised learning process, relying on regression
techniques to estimate a pixel-based density map from
the image. The final count is obtained by summing all
pixel values (Lempitsky and Zisserman, 2010). Fig-
ure 1 illustrates this approach.
We propose an end-to-end CNN-based UDA al-
gorithm for traffic density estimation and counting,
based on adversarial learning. Adversarial learning
is performed directly on the generated density maps,
i.e., in the output space, given that in this specific
case, the output space contains valuable information
such as scene layout and context. We focus on vehi-
cle counting, but the approach is suitable for counting
any other types of objects. To the best of our knowl-
edge, we are the first to introduce a UDA scheme for
counting to reduce the gap between the source and the
target domain without using additional labels.
We conducted experiments considering different
types of domain shifts and validating our approach
on various vehicle counting datasets. First, we em-
ployed two existing datasets for traffic density esti-
mation, WebCamT (Zhang et al., 2017a) and TRAN-
COS (Guerrero-G
´
omez-Olmedo et al., 2015). To em-
phasize the domain shift problem, we used as source
domain images acquired by a specific subset of cam-
eras. In contrast, we represented the target domain
with images captured by a different subset of cameras,
seeing different perspectives and visual contexts. We
call this type of domain shift as the Camera2Camera
domain shift. Comparisons with other techniques on
these datasets show the superiority of our approach.
In order to test our technique with further types of
domain shifts, we created and made publicly available
the two additional datasets described in the following.
The NDISPark - Night and Day Instance Seg-
mented Park dataset, consisting of images taken from
surveillance cameras in a parking lot. Here, on the
one hand, source data include annotated images col-
lected by various cameras during the day. On the
other hand, the unlabeled target domain contains im-
ages collected, in the same scenarios, during the
night. We call this domain shift Day2Night.
The GTA - Grand Traffic Auto dataset, a vast col-
lection of synthetic images generated with the highly
photo-realistic graphical engine of the Grand Theft
Auto V video game, developed by Rockstar North.
This dataset consists of urban traffic scenes, automat-
ically and precisely annotated with per-pixel annota-
tions. To the best of our knowledge, it is the first in-
stance segmentation synthetic dataset of traffic sce-
narios. We use this dataset to train the counting algo-
rithm. Then, we performed domain adaptation to be
able to count in real images. In this case, the domain
shift is represented by the Synthetic2Real difference.
Figure 2 summarizes the described domain shifts
that we have addressed.
In all the experiments, we show that our
UDA technique always outperforms the non-domain
adapted models.
Contributions of this work can be summarized as
follows:
• We introduce a UDA algorithm for traffic density
estimation and counting, which can reduce the do-
main gap between a labeled source dataset and an
unlabeled target one. To the best of our knowl-
edge, this is the first time that UDA is applied to
counting.
• We create and make publicly available two new
datasets, both having instance segmentation anno-
tations. One is manually annotated and consists
of images of parked cars collected during the day
and by night. The second is a synthetic collection
of images taken from a photo-realistic graphical
engine, where the per-pixel annotations are auto-
matically created.
• We conduct extensive experiments taking into ac-
count three different types of domain shifts and
validating our technique on various vehicle count-
ing datasets, demonstrating a significant improve-
ment using our UDA algorithm compared to the
model’s performance without domain adaptation.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
186

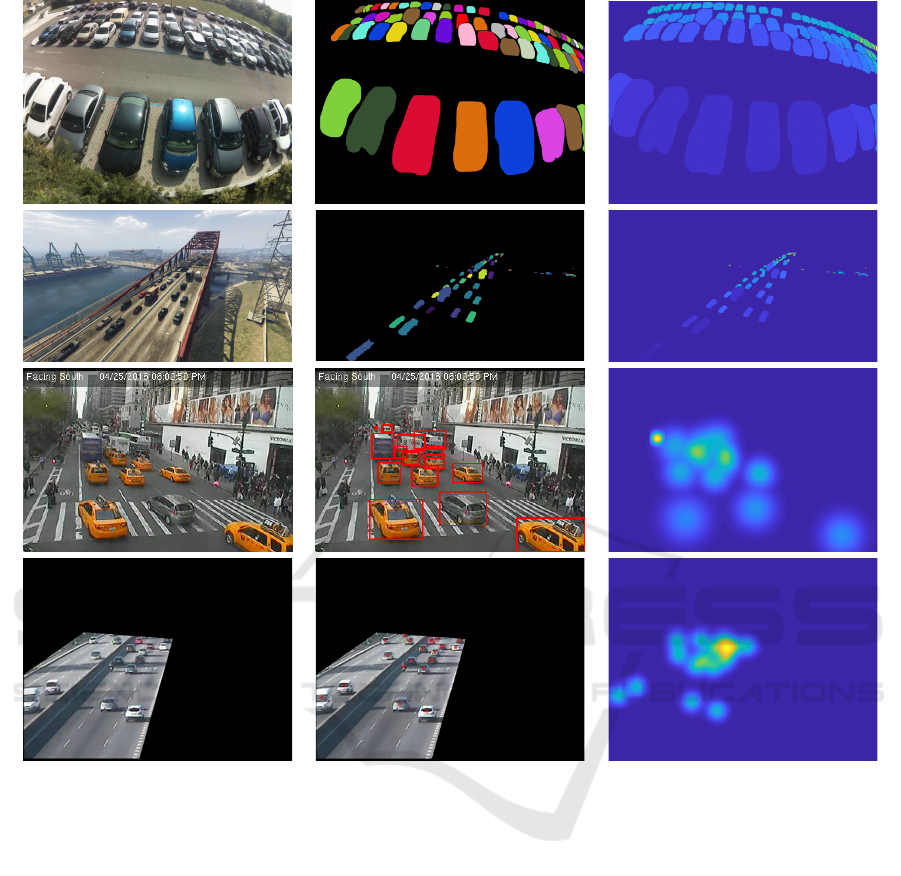
(a) (b) (c) (d)
Figure 2: The Domain Shift scenarios that have been addressed in this work: (a) Day2Night; (b) and (c) Camera2Camera;
(d) Synthetic2Real. The first row represents the labeled source domain, while the second represents the unlabeled target one
used for our unsupervised domain adaptation.
2 RELATED WORK
This section reviews some previous work related to
the Unsupervised Domain Adaptation and the Count-
ing task.
2.1 Unsupervised Domain Adaptation
Traditional UDA approaches have been developed to
address the problem of image classification, and they
try to align features across the two domains ((Ganin
and Lempitsky, 2015), (Tzeng et al., 2017)). How-
ever, as pointed out in (Zhang et al., 2017b), they do
not perform well in other tasks.
More recent advances also involve the semantic
segmentation task. In this case, adversarial training
for UDA is the most employed approach. It includes
two networks. The first predicts the segmentation
maps for the input source image. The second acts
as a discriminator, taking the feature maps from the
segmentation network and trying to predict the input
domain. The adversarial loss, computed from the dis-
criminator output, tries to make the distributions of
the two domains more similar. The first to apply such
a technique is (Hoffman et al., 2016). More recently,
the work proposed in (Hong et al., 2018) employs a
residual network and adversarial training to make the
source feature maps closer to the target ones. The
authors of (Chen et al., 2019) combine semantic seg-
mentation and depth estimation to boost the adapta-
tion performance, providing to the discriminator the
segmentation and the depth prediction maps jointly.
Another interesting work that inspired this paper is
(Tsai et al., 2018), where the authors applied adver-
sarial training to the output space taking advantage of
the structural consistency across domains.
A very appealing application of domain adapta-
tion concerns synthetic data, which has led to the
development of several synthetic datasets, such as
ViPeD ((Amato et al., 2019), (Ciampi et al., 2020a))
for pedestrian detection and SYNTHIA (Ros et al.,
2016) for semantic segmentation and autonomous
driving applications. In this case, the algorithm is
trained using these synthetic images and applied over
real images. The domain adaptation algorithm is in
charge of filling the gap between the two worlds.
2.2 The Counting Task
Following the taxonomy adopted in (Sindagi and Pa-
tel, 2018), we can broadly classify existing counting
approaches into two categories: counting by detection
and counting by regression. Counting by detection is
a supervised technique where we localize instances
of the objects, and then we count them. Some rele-
vant works present in the literature are (Ciampi et al.,
2018), (Amato et al., 2019), (Amato et al., 2018),
(Aich and Stavness, 2018), (Laradji et al., 2018). In-
stead, Counting by regression (Lempitsky and Zis-
serman, 2010) is a supervised learning approach that
tries to establish a direct mapping (linear or not) from
the image features to the number of objects present
in the scene or a corresponding density map (i.e., a
continuous-valued function), skipping the challeng-
ing task of detecting instances of the objects.
Domain Adaptation for Traffic Density Estimation
187

Regression techniques have shown superior per-
formance in crowded scenarios where the objects’
instances are sometimes not clearly visible due to
occlusions, and they have been applied to a multi-
tude of situations. The first work that employed a
pure CNN to estimate the density and count people
in crowded contexts is presented by (Boominathan
et al., 2016). A more efficient structure is proposed
by (Zhang et al., 2016) introducing a Multi-Column
CNN-based architecture (MCNN) for crowd count-
ing. A similar idea is developed by (O
˜
noro-Rubio
and L
´
opez-Sastre, 2016) with a scale-aware, multi-
column counting model named Hydra-CNN able to
estimate traffic densities in congested scenes. More
recently, the authors of (Li et al., 2018) introduced
CSRNet. This CNN-based algorithm uses dilated ker-
nels to deliver larger reception fields and replace pool-
ing operations. We employ this network as the base-
line in our work, and we briefly review its architecture
in the next sections.
The main limitations of these approaches are due
to the scarcity of data. As a result, existing methods
often suffer from overfitting, which leads to perfor-
mance degradation while transferring them to other
scenes. Besides, there is another inherent problem:
the labels of these datasets are not very accurate. Most
of the existing datasets are dot-annotated. Conse-
quently, the ground truth density maps are just an ap-
proximation in which the objects’ sizes are estimated
using some heuristics. This work addresses both
problems proposing an unsupervised domain adap-
tation technique that exploits unlabeled data and in-
troduces two new datasets with per-pixel annotations
that allow the creation of precise ground truth density
maps. To the best of our knowledge, this work is the
first that employs UDA to the counting task, extend-
ing the very preliminary results obtained in (Ciampi
et al., 2020b), where a similar approach was exploited
in just one limited scenario.
3 DATASETS
As mentioned before, to prove our approach’s va-
lidity, we performed experiments on various vehi-
cle counting datasets, offering different domain shift
characteristics. Specifically, we exploited two exist-
ing datasets for traffic density estimation: WebCamT
(Zhang et al., 2017a) and TRANCOS (Guerrero-
G
´
omez-Olmedo et al., 2015). Then, we used two ad-
ditional datasets that we created on purpose and made
publicly available: the NDISPark - Night and Day In-
stance Segmented Park dataset and the GTA - Grand
Traffic Auto dataset. Figure 3 shows some images be-
longing to these datasets, together with the associated
labels and the corresponding generated density maps
used for the counting task. In the next sections, we
describe more in detail each of them.
3.1 WebCamT Dataset
The WebCamT dataset is a collection of traffic scenes
recorded using city-cameras introduced by (Zhang
et al., 2017a). It is particularly challenging to ana-
lyze due to the low-resolution (352 × 240), high oc-
clusion, and large perspective. We consider a total of
about 40,000 images belonging to 10 different cam-
eras and consequently having different views. We
employ the existing bounding box annotations of the
dataset to generate ground truth density maps. In par-
ticular, we consider one Gaussian Normal kernel for
each vehicle present in the scene, having a value of
µ and σ equal to the center and proportional to the
size of the bounding box surrounding the vehicle, re-
spectively. We used this dataset to test performance
with the Camera2Camera domain shift, introduced in
Section 1.
3.2 TRANCOS Dataset
The TRANCOS dataset is a public dataset contain-
ing 1244 dot-annotated images of different congested
traffic scenes captured by surveillance cameras, in-
troduced by (Guerrero-G
´
omez-Olmedo et al., 2015).
The approximated ground truth density maps are gen-
erated by putting one Normal Gaussian kernel for
each dot present in the scene, having a value of σ em-
pirically decided by the authors. They also provided
the regions of interest (ROIs) for each image. We
used this dataset to test performance with the Cam-
era2Camera domain shift, mentioned in Section 1.
3.3 NDISPark Dataset
The NDISPark - Night and Day Instance Segmented
Park dataset was created by us on purpose and made
publicly available. It is a small, manually annotated
dataset for counting cars in parking lots, consisting
of about 250 images. This dataset is challenging and
describes most of the problematic situations that we
can find in a real scenario: seven different cameras
capture the images under various weather conditions
and viewing angles. Another challenging aspect is
the presence of partial occlusion patterns in many
scenes such as obstacles (trees, lampposts, other cars)
and shadowed cars. Furthermore, it is worth noting
that images are taken during the day and the night,
showing utterly different lighting conditions and that,
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
188
(a) (b) (c)
Figure 3: Some examples taken by the four datasets used in this work: (a) Images; (b) Labels; (c) Density Maps generated
from the labels. Each row correspond to a specific dataset: from top to bottom, the NDISPark - Night and Day Instance
Segmented Park and the GTA - Grand Traffic Auto datasets introduced in this work, the WebCamT dataset (Zhang et al.,
2017a) and the TRANCOS dataset (Guerrero-G
´
omez-Olmedo et al., 2015). Note that the densities maps generated in our
datasets are accurate since we start from an instance segmentation annotations. Also notice that, in the case of the GTA -
Grand Traffic Auto dataset, annotations are automatically generated without human effort.
unlike most counting datasets, the NDISPark dataset
is precisely annotated with instance segmentation la-
bels, allowing us to generate accurate ground truth
density maps for the counting task since the size of
the vehicles is well-known. We employed this dataset
to test performance with the Day2Night domain shift,
explained in Section 1.
3.4 GTA Dataset
The GTA - Grand Traffic Auto dataset was also created
by us on purpose and made publicly available. It is a
vast collection of about 15,000 synthetic images of
urban traffic scenes collected using the highly photo-
realistic graphical engine of the GTA V - Grand Theft
Auto V video game. About half of them concern ur-
ban city areas, while the remaining involve sub-urban
areas and highways. To generate this dataset, we de-
signed a framework that automatically and precisely
annotates the vehicles present in the scene with per-
pixel annotations. To the best of our knowledge, this
is the first instance segmentation synthetic dataset of
city traffic scenarios. As in the NDISPark dataset, the
instance segmentation labels allow us to produce ac-
curate ground truth density maps for the counting task
since the size of the vehicles is well-known. We ex-
Domain Adaptation for Traffic Density Estimation
189

ploited this dataset to test performance with the Syn-
thetic2Real domain shift, introduced in Section 1.
4 PROPOSED METHOD
Our method relies on a CNN model trained end-to-
end with adversarial learning in the output space (i.e.,
the density maps), which contains rich information
such as scene layout and context. The peculiarity of
our adversarial learning scheme is that it forces the
predicted density maps in the target domain to have
local similarities with the ones in the source domain.
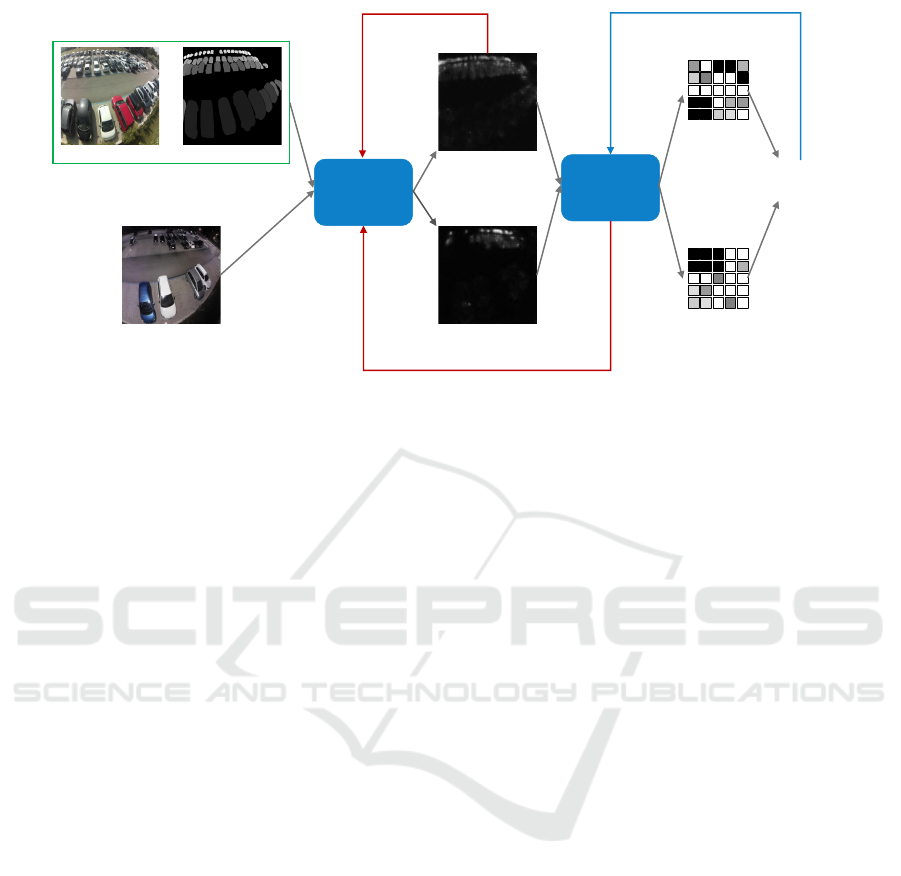
Figure 4 depicts the proposed framework consist-
ing of two modules: 1) a CNN that predicts traffic
density maps, from which we estimate the number of
vehicles in the scene, and 2) a discriminator that iden-
tifies whether a density map (received by the density
map estimator) was generated from an image of the
source domain or the target domain.
In the training phase, the density map predictor
learns to map images to densities based on annotated
data from the source domain. At the same time, it
learns to predict realistic density maps for the target
domain by trying to fool the discriminator with an ad-
versarial loss. The discriminator’s output is a pixel-
wise classification of a low-resolution map, as illus-
trated in Figure 4, where each pixel corresponds to
a small region in the density map. Consequently, the
output space is forced to be locally similar for both the
source and target domains. In the inference phase, the
discriminator is discarded, and only the density map
predictor is used for the target images. We describe
each module and how it is trained in the following
subsections.
4.1 Density Estimation Network
We formulate the counting task as a density map es-
timation problem (Lempitsky and Zisserman, 2010).
The density (intensity) of each pixel in the map de-
pends on its proximity to a vehicle centroid and the
size of the vehicle in the image so that each vehicle
contributes with a total value of 1 to the map. There-
fore, it provides statistical information about the vehi-
cles’ location and allows the counting to be estimated
by summing of all density values.
This task is performed by a CNN-based model,
whose goal is to automatically determine the vehicle
density map associated with a given input image. For-
mally, the density map estimator, Ψ : R
C×H ×W
7→
R
H ×W
, transforms a W × H input image I with C
channels, into a density map, D = Ψ(I ) ∈ R
H ×W
.
4.2 Discriminator Network
The discriminator network, denoted by Θ, also con-
sists of a CNN model. It takes as input the density
map, D, estimated by the network Ψ. Its output is
a lower resolution probability map where each pixel
represents the probability that the corresponding re-
gion (from the input density map) comes either from
the source or the target domain. The goal of the dis-
criminator is to learn to distinguish between density
maps belonging to source or target domains. Through
an adversarial loss, this discriminator will, in turn,
force the density estimator to provide density maps
with similar distributions in both domains. In other
words, the target domain density maps have to look
realistic, even though the network Ψ was not trained
with an annotated training set from that domain.
4.3 Domain Adaptation Learning
The proposed framework is trained based on an alter-
nate optimization of the density estimation network,
Ψ, and the discriminator network, Θ. Regarding the
former, the training process relies on two compo-
nents: 1) density estimation using pairs of images
and ground truth density maps, which we assume are
only available in the source domain; and 2) adversar-
ial training, which aims to make the discriminator fail
to distinguish between the source and target domains.
As for the latter, images from both domains are used
to train the discriminator on correctly classifying each
pixel of the probability map as either source or target.
To implement the above training procedure, we
use two loss functions: one is employed in the first
step of the algorithm to train network Ψ, and the other
is used in the second step to train the discriminator Θ.
These loss functions are detailed next.
Network Ψ Training. We formulate the loss function
for Ψ as the sum of two main components:
L(I
S
, I
T
) = L
density
(I
S
) + λ
adv
L
adv
(I
T
), (1)
where L
density
is the loss computed using ground truth
annotations available in the source domain, while
L
adv
is the adversarial loss that is responsible for mak-
ing the distribution of the target and the source do-
main closer to each other. In particular, we define
the density loss L
density
as the mean square error be-
tween the predicted and ground truth density maps,
i.e. L
density
= MSE(D
S
, D
S G T
).
To compute the adversarial loss L
adv
, we first
forward the images belonging to the target domain
through network Ψ, to generate the predicted density
maps D
T
. Then, we forward D
T
through network
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
190
+
Source Image
Label
Source Prediction
Density Estimator
Network
Target Image
Target Prediction
Discriminator
Network
Discriminator
Loss
Density Loss
Adversarial Loss
Figure 4: Algorithm overview. Given C × H ×W images from source and target domains, we pass them through the density
map estimation network to obtain output predictions. A density loss is computed for source predictions based on the ground
truth. In order to improve target predictions, a discriminator is used to locally classify whether a density map belongs to the
source or target domain. Then, an adversarial loss is computed on the target prediction and is back-propagated to the density
map estimation and counting network.
Θ, to generate the probability map P = Θ(Ψ(I
T
)) ∈
[0, 1]
H
0
×W
0
, where H
0
< H and W
0
< W . The adver-
sarial loss is given by
L
adv
(I
T
) = −
∑
h,w
log(P
h,w
), (2)
where the subscript h, w denotes a pixel in P. This loss
makes the distribution of D
T
closer to D
S
by forcing
Ψ to fool the discriminator, through the maximization
of the probability of D
T
being locally classified as
belonging to the source domain.
Network Θ Training. Given an image I and the
corresponding predicted density map D, we feed D
as input to the fully-convolutional discriminator Θ to
obtain the probability map P. The discriminator is
trained by comparing P with the ground truth label
map Y ∈ {0, 1}
H
0
×W
0
using a pixel-wise binary cross-
entropy loss
L
disc
(I ) = −
∑
h,w
(1 −Y
h,w
)log(1 − P
h,w
)+
+Y
h,w
log(P
h,w
),
(3)
where Y
h,w
= 0 ∀ h, w if I is taken from the target
domain and Y
h,w
= 1 otherwise.
5 EXPERIMENTAL RESULTS
5.1 Implementation Details
Density Map Estimation and Counting Network.
We build our density map estimation network based
on the Congested Scene Recognition Network (CSR-
Net) (Li et al., 2018). Here we briefly review some
of the features characterizing this algorithm. CSRNet
provides a CNN-based method that can understand
highly congested scenes and perform accurate den-
sity estimation and counting. It is composed of two
major components. The authors use the well-known
VGG-16 network (Simonyan and Zisserman, 2014) as
the front-end for 2D feature extraction because of its
strong transfer learning ability. On the other hand, the
back-end consists of dilated kernels. The basic con-
cept of using dilated convolutions is to deliver larger
reception fields replacing the pooling operations. It is
worth noting that the max pool operation is responsi-
ble for losing quality in the density generation proce-
dure. Since the output size from VGG is reduced by
a factor of 8 of the original input size, we up-sampled
the final output to compare it with the ground truth
density map.
Discriminator. We use a Fully Convolutional Net-
work similar to (Tsai et al., 2018) and to (Radford et
al., 2015), composed of 5 convolution layers with ker-
nel 4 × 4 and stride of 2. The number of channels
are {64, 128, 256, 512, 1}, respectively. Each con-
volution layer is followed by a leaky ReLU having a
parameter equals to 0.2.
We implement the whole system using the Py-
Torch framework on a single Nvidia RTX 2080 GPU
with 12 GB memory. To train the density estimator
network and the discriminator, we use Adam opti-
mizer (Kingma and Ba, 2014) with an initial learn-
Domain Adaptation for Traffic Density Estimation
191

ing rate set to 10
−5
. During the training, it is crucial
to balance the weight between density and adversarial
losses. A small value of λ
adv
may not help the training
process significantly. In contrast, a larger value may
propagate incorrect gradients to the density estimator.
We empirically choose the value of λ
adv
depending on
the employed dataset.
5.2 Results and Discussion
We validate the proposed UDA method for density es-
timation and counting of traffic scenes under differ-
ent settings. First, we employ the NDISPark dataset,
and we test the Day2Night domain shift; then, we
utilize the WebCamT and the TRANCOS datasets to
take into account the Camera2Camera performance
gap. Finally, we use the GTA dataset to consider the
Synthetic2Real domain difference. For all the experi-
ments, we base the evaluation of the models on three
metrics widely used for the counting task: (i) Mean
Absolute Error (MAE) that measures the absolute
count error of each image; (ii) Mean Squared Error
(MSE) that instead quantifies the squared count error
for each image; (iii) Average Relative Error (ARE),
which measures the absolute count error divided by
the true count. Note that, as a result of the squaring of
each error, the MSE effectively penalizes large errors
more heavily than the small ones. Instead, the ARE
is the only metric that considers the relation of the er-
ror and the total number of vehicles present for each
image. Results are summarized in Table 1, while in
the next sections, we describe the results obtained for
every considered scenario. Finally, we also plot some
examples of the outputs obtained using our models,
showing their visual quality. In particular, Figure 5
shows the ground truth and the predicted density maps
for some random samples of the considered scenarios.
5.2.1 Day2Night Domain Shift
In this scenario, we split the NDISPark dataset into
train, validation, and test subsets containing about
100, 50, and 100 images. The former has only pic-
tures taken during the day (source domain), while
the validation and the test subsets contain night im-
ages (target domain). To fairly evaluate our method,
we first consider the baseline model without the do-
main adaptation module (i.e., putting the λ
adv
value to
zero). Then, we add the adversarial module compar-
ing the results. In both cases, we train the network for
300 epochs, validating at each iteration. We choose
the best validation model in terms of MAE, and we
test it against the test set. As showed in Table 1, using
our solution, we obtained performance improvements
considering all the three metrics.
5.2.2 Camera2Camera Domain Shift
In this case, we perform two sets of experiments to
test the domain shift that takes place when we con-
sider a camera different from the ones used in the
training phase.
First, we consider the WebCamT dataset, and we
split it into train, validation, and test subsets. In the
former, we account for about 25,000 images belong-
ing to 7 cameras (source domain). In the last two, we
consider the remaining 15,000 pictures of 3 different
cameras, having diverse contexts and slightly differ-
ent angle of views (target domain). We compare the
baseline and our solution when training for 20 epochs,
validate it at each iteration, and choose the best model
in terms of MAE.
Second, we take into account the TRANCOS
dataset. We split it into train, validation, and test sets,
following (Guerrero-G
´
omez-Olmedo et al., 2015).
The train set represents the source domain, while the
other two belong to the target domain and are col-
lected in different contexts. We train our domain
adaptation for 200 epochs, picking the best validation
model in terms of MAE, and we evaluate it against
the test set. We compare the obtained results with
the ones claimed by (Li et al., 2018) using only the
state-of-the-art CSRNet algorithm (i.e., our baseline)
and with other state-of-the-art techniques present in
the literature.
As showed in Table 1, we obtained performance
improvements in both cases, taking into account all
three metrics. Considering the publicly available
TRANCOS dataset, we achieved superior results not
only concerning the baseline but also compared to the
other considered approaches.
5.2.3 Synthetic2Real Domain Shift
In this scenario, we train the algorithm using synthetic
images. Then we test it on real data. In particular, we
consider a subset of the GTA dataset containing about
5,000 images of city traffic scenarios, and we use it as
the training set (source domain). On the other hand,
we account for the test and the validation subsets of
the WebCamT dataset as the target domain. We com-
pare the results obtained using the baseline model and
our solution with the domain adaptation module. In
both cases, we train the algorithm for 20 epochs, val-
idating at each iteration. We choose the best model in
terms of MAE.
Again, as showed in Table 1, we achieved better
results compared to the basic model. We believe that
this scenario is particularly interesting because we ob-
tained comparable results with the previous one, but
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
192
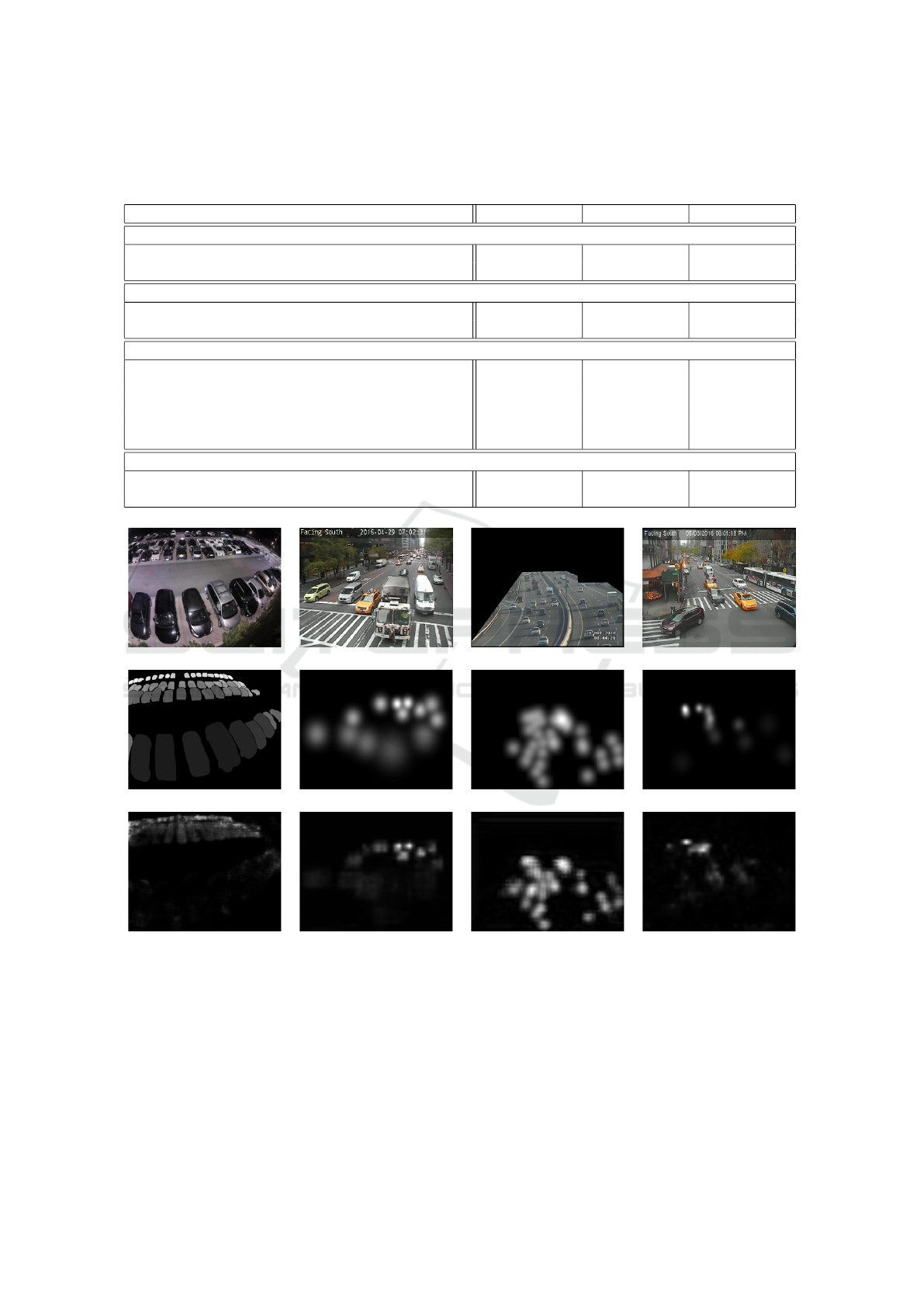
Table 1: Experimental results obtained for the four considered domain shift. We employed three evaluation metrics: the Mean
Absolute Error (MAE), the Mean Squared Error (MSE) and the Average Relative Error (ARE). We achieved performance
improvements for all the scenarios, considering all the three metrics.
MAE MSE ARE
Day2Night Domain Shift - NDISPark Dataset
Baseline - CSRNet (Li et al., 2018) 3.95 27.45 0.43
Our Approach 3.49 20.90 0.39
Camera2Camera Domain Shift - WebCamT Dataset (Zhang et al., 2017a)
Baseline - CSRNet (Li et al., 2018) 3.24 16.83 0.21
Our Approach 2.86 13.03 0.19
Camera2Camera Domain Shift - TRANCOS Dataset (Guerrero-G
´
omez-Olmedo et al., 2015)
Hydra-CNN (O
˜
noro-Rubio and L
´
opez-Sastre, 2016) 10.99 68.70 0.71
FCN-MT (Zhang et al., 2017a) 5.31 - 0.85
LC-ResFCN (Laradji et al., 2018) 3.32 - -
Baseline - CSRNet (Li et al., 2018) 3.56 30.64 0.10
Our Approach 3.30 23.60 0.08
Synthetic2Real Domain Shift - GTA Dataset
Baseline - CSRNet (Li et al., 2018) 4.10 25.83 0.28
Our Approach 3.88 23.80 0.27
GT count: 56 GT count: 13 GT count: 35 GT count: 12
Pred count: 53 Pred count: 14 Pred count: 38 Pred count: 11
(a) (b) (c) (d)
Figure 5: Examples of the predicted density maps in the considered scenarios: (a) Day2Nigh Domain Shift using the NDIS-
Park dataset; (b) and (c) Camera2Camera Domain Shift employing the WebCamT and TRANCOS datasets, respectively; (d)
Synthetic2Real Domain Shift using the GTA dataset for the training phase and the WebCamT dataset for testing on real images.
In the first row, we report the input images. In the second row, the ground truth, while in the third, the predicted density maps
obtained with our models.
Domain Adaptation for Traffic Density Estimation
193

this time without using manual annotations neither in
the source domain nor in the target one.
6 CONCLUSIONS
In this article, we tackle the problem of determin-
ing the density and the number of objects present in
large sets of images. Building on a CNN-based den-
sity estimator, the proposed methodology can gener-
alize to new data sources for which there are no an-
notations available. We achieve this generalization by
exploiting an Unsupervised Domain Adaptation strat-
egy, whereby a discriminator attached to the output
forces similar density distribution in the target and
source domains. Experiments show a significant im-
provement relative to the performance of the model
without domain adaptation. To the best of our knowl-
edge, we are the first to introduce a UDA scheme for
counting to reduce the gap between the source and the
target domain without using additional labels. Given
the conventional structure of the estimator, the im-
provement obtained by just monitoring the output en-
tails a great capacity to generalize learned knowledge,
thus suggesting the application of similar principles to
the inner layers of the network.
Another contribution is represented by the cre-
ation of two new per-pixel annotated datasets made
available to the scientific community. One of the two
novel datasets is a synthetic dataset created from a
photo-realistic video game. Here the labels are auto-
matically assigned while interacting with the API of
the graphical engine. Using this synthetic dataset, we
demonstrated that it is possible to train a model with a
precisely annotated and automatically generated syn-
thetic dataset and perform UDA toward a real-world
scenario, obtaining very good performance without
using additional manual annotations.
In our view, this work’s outcome opens new per-
spectives to deal with the scalability of learning meth-
ods for large physical systems with scarce supervisory
resources.
ACKNOWLEDGEMENTS
This work was partially supported by H2020 project
AI4EU under GA 825619 and by H2020 project
AI4media under GA 951911.
REFERENCES
Aich, S. and Stavness, I. (2018). Improving object
counting with heatmap regulation. arXiv preprint
arXiv:1803.05494.
Amato, G., Bolettieri, P., Moroni, D., Carrara, F., Ciampi,
L., Pieri, G., Gennaro, C., Leone, G. R., and Vairo, C.
(2018). A wireless smart camera network for parking
monitoring. In 2018 IEEE Globecom Workshops (GC
Wkshps), pages 1–6.
Amato, G., Ciampi, L., Falchi, F., and Gennaro, C. (2019).
Counting vehicles with deep learning in onboard uav
imagery. In 2019 IEEE Symposium on Computers and
Communications (ISCC), pages 1–6.
Amato, G., Ciampi, L., Falchi, F., Gennaro, C., and
Messina, N. (2019). Learning pedestrian detection
from virtual worlds. In Ricci, E., Rota Bul
`
o, S.,
Snoek, C., Lanz, O., Messelodi, S., and Sebe, N., ed-
itors, Image Analysis and Processing – ICIAP 2019,
pages 302–312, Cham. Springer International Pub-
lishing.
Boominathan, L., Kruthiventi, S. S. S., and Babu, R. V.
(2016). Crowdnet: A deep convolutional network for
dense crowd counting. In Proceedings of the 24th
ACM International Conference on Multimedia, MM
’16, page 640–644, New York, NY, USA. Association
for Computing Machinery.
Chen, Y., Li, W., Chen, X., and Gool, L. V. (2019). Learn-
ing semantic segmentation from synthetic data: A ge-
ometrically guided input-output adaptation approach.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 1841–1850.
Ciampi, L., Amato, G., Falchi, F., Gennaro, C., and Rabitti,
F. (2018). Counting vehicles with cameras. In SEBD.
Ciampi, L., Messina, N., Falchi, F., Gennaro, C., and Am-
ato, G. (2020a). Virtual to real adaptation of pedes-
trian detectors. Sensors, 20(18):5250.
Ciampi, L., Santiago, C., Costeira, J. P., Gennaro, C., and
Amato, G. (2020b). Unsupervised vehicle counting
via multiple camera domain adaptation. In Saffiotti,
A., Serafini, L., and Lukowicz, P., editors, Proceed-
ings of the First International Workshop on New Foun-
dations for Human-Centered AI (NeHuAI) co-located
with 24th European Conference on Artificial Intelli-
gence (ECAI 2020), Santiago de Compostella, Spain,
September 4, 2020, volume 2659 of CEUR Workshop
Proceedings, pages 82–85. CEUR-WS.org.
Ganin, Y. and Lempitsky, V. (2015). Unsupervised domain
adaptation by backpropagation. volume 37 of Pro-
ceedings of Machine Learning Research, pages 1180–
1189, Lille, France. PMLR.
Guerrero-G
´
omez-Olmedo, R., Torre-Jim
´
enez, B., L
´
opez-
Sastre, R., Maldonado-Basc
´
on, S., and O
˜
noro-Rubio,
D. (2015). Extremely overlapping vehicle counting.
In Paredes, R., Cardoso, J. S., and Pardo, X. M., ed-
itors, Pattern Recognition and Image Analysis, pages
423–431, Cham. Springer International Publishing.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In 2017 IEEE International Conference
on Computer Vision (ICCV), pages 2980–2988.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
194

Hoffman, J., Wang, D., Yu, F., and Darrell, T. (2016). Fcns
in the wild: Pixel-level adversarial and constraint-
based adaptation. arXiv preprint arXiv:1612.02649.
Hong, W., Wang, Z., Yang, M., and Yuan, J. (2018). Con-
ditional generative adversarial network for structured
domain adaptation. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 1335–1344.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Laradji, I. H., Rostamzadeh, N., Pinheiro, P. O., Vazquez,
D., and Schmidt, M. (2018). Where are the blobs:
Counting by localization with point supervision. In
Proceedings of the European Conference on Com-
puter Vision (ECCV), pages 547–562.
Lecun, Y., Bottou, L., Bengio, Y., and Haffner, P. (1998).
Gradient-based learning applied to document recogni-
tion. Proceedings of the IEEE, 86(11):2278–2324.
Lempitsky, V. and Zisserman, A. (2010). Learning to count
objects in images. In Lafferty, J. D., Williams, C. K. I.,
Shawe-Taylor, J., Zemel, R. S., and Culotta, A., edi-
tors, Advances in Neural Information Processing Sys-
tems 23, pages 1324–1332. Curran Associates, Inc.
Li, Y., Zhang, X., and Chen, D. (2018). Csrnet: Dilated
convolutional neural networks for understanding the
highly congested scenes. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 1091–1100.
O
˜
noro-Rubio, D. and L
´
opez-Sastre, R. J. (2016). Towards
perspective-free object counting with deep learning.
In Leibe, B., Matas, J., Sebe, N., and Welling, M.,
editors, Computer Vision – ECCV 2016, pages 615–
629, Cham. Springer International Publishing.
Radford et al., A. (2015). Unsupervised representation
learning with deep convolutional generative adversar-
ial networks. arXiv preprint arXiv:1511.06434.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. arXiv preprint arXiv:1804.02767.
Ros, G., Sellart, L., Materzynska, J., Vazquez, D., and
Lopez, A. M. (2016). The synthia dataset: A large
collection of synthetic images for semantic segmenta-
tion of urban scenes. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 3234–3243.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Sindagi, V. A. and Patel, V. M. (2018). A survey of recent
advances in cnn-based single image crowd counting
and density estimation. Pattern Recognition Letters,
107:3 – 16. Video Surveillance-oriented Biometrics.
Torralba, A. and Efros, A. A. (2011). Unbiased look at
dataset bias. In CVPR 2011, pages 1521–1528.
Tsai, Y.-H., Hung, W.-C., Schulter, S., Sohn, K., Yang, M.-
H., and Chandraker, M. (2018). Learning to adapt
structured output space for semantic segmentation. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 7472–7481.
Tzeng, E., Hoffman, J., Saenko, K., and Darrell, T. (2017).
Adversarial discriminative domain adaptation. In Pro-
ceedings of the IEEE conference on computer vision
and pattern recognition, pages 7167–7176.
Zhang, S., Wu, G., Costeira, J. P., and Moura, J. M. (2017a).
Understanding traffic density from large-scale web
camera data. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
5898–5907.
Zhang, Y., David, P., and Gong, B. (2017b). Curriculum
domain adaptation for semantic segmentation of ur-
ban scenes. In Proceedings of the IEEE International
Conference on Computer Vision, pages 2020–2030.
Zhang, Y., Zhou, D., Chen, S., Gao, S., and Ma, Y. (2016).
Single-image crowd counting via multi-column con-
volutional neural network. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 589–597.
Domain Adaptation for Traffic Density Estimation
195
