
Generalized Dilation Structures in Convolutional Neural Networks
Gavneet Singh Chadha
a
, Jan Niclas Reimann and Andreas Schwung
Department of Automation Technology, South Westphalia University of Applied Sciences, Soest, Germany
Keywords:
Deep Convolutional Neural Networks, Dilated Convolution, Constrained Learning.
Abstract:
Convolutional neural networks are known to provide superior performance in various application fields such as
image recognition, natural language processing and time series analysis owing to their strong ability to learn
spatial and temporal features in the input domain. One of the most profound types of convolution kernels
presented in literature is the dilated convolution kernel used primarily for aggregating information from a
larger perspective or receptive field. However, the dilation rate and thereby the structure of the kernel has to be
fixed a priori, which limits the flexibility of these convolution kernels. In this study, we propose a generalized
dilation network where arbitrary dilation structures within a specific dilation rate can be learned. To this end,
we derive an end-to-end learnable architecture for dilation layers using the constrained log-barrier method.
We test the proposed architecture on various image recognition tasks by investigating and comparing with
the SimpleNet architecture. The results illustrate the applicability of the generalized dilation layers and their
superior performance.
1 INTRODUCTION
Convolutional Neural Networks (CNN) (Fukushima
and Miyake, 1982; LeCun et al., 1990) are known
to provide superior performance not only in image
recognition tasks but also in speech recognition, natu-
ral language processing and time series analysis (Bai
et al., 2018). In image recognition, convolution ker-
nels in the initial layers extract low level features
about the spatial relationships in the input domain,
which are hierarchically combined to form more com-
plex features in the deeper layers. However, depend-
ing on the provided task at hand, considering a larger
field of view in the initial layers of the model can be
helpful in reducing the total number of parameters re-
quired since the effective receptive field only occu-
pies a fraction of the theoretical receptive field (Luo
et al., 2016). Therefore, we conjecture that consider-
ing larger receptive fields can improve image recogni-
tion performance of CNNs and simultaneously reduc-
ing the number of convolution layers and active pa-
rameters required. Larger receptive fields with atrous
or dilation kernels have been proposed in (Fisher Yu
and Vladlen Koltun, 2016) where dilation refers to
the consideration of greater spatial resolutions of the
convolution kernels as illustrated in Fig. 1. The di-
lation rate of 1 is the standard convolution opera-
a
https://orcid.org/0000-0002-9374-9074
Figure 1: Dilation kernels with different dilation rates
(where rate=1 is the original convolution operation) (Chen
et al., ).
tion whereas increasing the dilation rate allows for a
larger receptive field without increase in the number
of learnable parameters. This is achieved by adding
zeroes between the weights of the convolution kernel.
In this paper, we improve the previously proposed
dilation neural networks in two aspects. First, we re-
lax the original dilation structure for 2-dimensional
convolution which assumes equidistant sampling in
height and width of the input image. This relaxation
enables varying sampling in both input dimensions as
well as arbitrary patterns in the dilation kernels al-
lowing for a more general selection of relevant input
values (see Fig. 2). Second, this relaxation for vary-
ing sampling is made learnable through standard gra-
dient descent techniques with the variant of the log-
barrier methods for optimization. Through the pro-
posed method, we aim to solve a continuous and dis-
crete optimization problem simultaneously wherein
Chadha, G., Reimann, J. and Schwung, A.
Generalized Dilation Structures in Convolutional Neural Networks.
DOI: 10.5220/0010302800790088
In Proceedings of the 10th Inter national Conference on Pattern Recognition Applications and Methods (ICPRAM 2021), pages 79-88
ISBN: 978-989-758-486-2
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
79

the dilation parameters are encouraged to be binary
variables, in contrast to the other parameters in the
network.
The organization of the paper is as follows. Sec-
tion 2 details the related work. In section 3, the di-
lation layer together with the proposed generalized
dilation layer for CNNs is explained. Additionally,
the end-to-end training technique with the log-barrier
function along with its variants are detailed here. Ex-
perimental results on MNIST and CIFAR-10 image
datasets along with a detailed analysis of generalized
dilation layer are illustrated in section 4, with the con-
clusion detailed in section 5.
2 RELATED WORK
Convolutions with dilated filters were first introduced
in (Holschneider et al., 1990) and (Shensa, 1992) in
the context of wavelet decomposition. Dilated convo-
lutions for deep neural networks have been initially
presented in (Fisher Yu and Vladlen Koltun, 2016)
to allow for multi-scale context aggregation without
downsampling of the resolution. Since then, dila-
tion networks have been used in semantic segmen-
tation methods due to their ability to capture large
context while preserving fine details. In (L. Chen
et al., 2018), large dilation factor are used in the
Deeplab model to provide large context, which re-
sults in improved performance. This is further en-
hanced in (Chen et al., 2016) by using atrous spatial
pyramid pooling (ASPP), i.e. multi-level dilated con-
volutions, improving the results by leveraging local
and wide context information. In (Sercu and Goel,
), time dilated convolutions are used for dense pre-
diction on sequences for speech recognition, while
modeling long-distance genomic dependencies with
dilated convolutions are reported in (Gupta and Rush,
2017). Iterated dilated convolutions are applied in
(Strubell et al., 2017) for entity recognition in text
modelling for improving the performance of varia-
tional autoencoders. Dilated residual networks are in-
troduced in (Yu et al., 2017), considerably improving
vanilla residual networks (He et al., 2016) in image
classification and segmentation. An application of di-
lation to time series analysis is provided in WaveNets
(van den Oord et al., ). However, in these works the
dilation structure is fixed during training. In contrast,
we keep the dilation structure flexible and end-to-end
trainable for each channel within bounds defined by
the hyperparameters.
Such training of flexible dilation structure has
been presented in (He et al., 2017) where a dilation
factor is trained for each channel of the convolution
layer. Furthermore, the dilation factor is defined in
R instead of Z
+
as in the original derivation. This
comes at the cost of calculating the output map by
means of a bilinear transformation in the regular case
of fractional dilation factors. It must be noted, that
although fractional dilation factors are possible, the
structure of the dilation is still fixed in this case. More
general structures are allowed by active convolutions
(Yunho Jeon and Junmo Kim, 2017), however with
low deviations from the original convolution kernel.
Deformable convolutional networks as introduced in
(Dai et al., 2017) and further improved in (Zhu et al.,
2019) allowing for similar convolution structures as
proposed by our approach. There, each point in the
convolution grid is augmented with a learnable real
valued offset. As in (He et al., 2017), a bilinear trans-
formation is needed before applying the convolution.
Contrary to the other approaches, we hold on to an up-
per limit of integer dilation factors, while allowing for
arbitrary structures of the convolution kernel within a
receptive field using an end-to-end training method-
ology. Due to that, we end up in the exact grid po-
sition without the need for a bilinear transformation.
Finally, (Carl Lemaire et al., 2018) propose a bud-
get aware pruning methodology using the log-barrier
method. On the contrary, we propose the selection
of relevant structure in a receptive field for efficient
feature extraction.
3 GENERALIZED DILATION
NEURAL NETWORKS
In this section, we introduce generalized dilation lay-
ers starting with the description of standard dilation
networks proposed in (Fisher Yu and Vladlen Koltun,
2016).
3.1 Dilation Layer
We start with the standard discrete convolution oper-
ator defined as
(F ∗ k)(p) =
∑
s+t=p
F(s) · k(t). (1)
where F and k denote the receptive field and the con-
volution kernel respectively. In dilated convolution,
we have instead
(F ∗
l
k)(p) =
∑
s+lt=p
F(s) · k(t), (2)
where the term ∗
l
denotes the dilated convolution and
l is the dilation factor. Note that the standard convo-
lution operation is obtained for l = 1. By changing
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
80

the dilation factors, the dilated convolution operator
applies the same filter (with the same parameters) at
a different range of the receptive field and hence, al-
lows for better multiscale context aggregation (Fisher
Yu and Vladlen Koltun, 2016). The effect of the dila-
tion operation is illustrated in Figure 1 which shows
the increasing size of the filter with increasing dilation
factor.
3.2 Generalized Dilation Layers
The structure of the dilated convolution operation is
kept fixed during training of a neural network. We
aim to allow for more flexibility in that we want to
make the dilation structure flexible and trainable. To
this end, we will first derive an alternative representa-
tion of the dilation operation as follows. Basically, the
dilation operation can be seen as a conventional con-
volution operation with receptive field size increased
from p × p to y × y with p < y. Correspondingly, a
larger weight matrix W ∈ R
y×y
is applied in which a
certain number of weights are fixed to zero a priori
such that the active weights (weights unequal zero)
sum to p × p. Hence, we define vectors ψ
l
∈ {0, 1}
y
and ψ
r
∈ {0, 1}
y
and matrices Ψ
l
and Ψ
r
where
diag(Ψ
l
) = ψ
l
, diag(Ψ
r
) = ψ
r
. (3)
Consequently, defining a new weight matrix as
˜
W = Ψ
l
·W · Ψ
r
(4)
and using this weight matrix for convolution provides
a generalization to the dilation layer described previ-
ously. As an example, the dilation with active weight
of size 3 × 3 and dilation factor of 2 can be obtained
by defining ψ
l
= ψ
r
= [1 0 1 0 1]
T
. Note that by arbi-
trarily setting the components of ψ
l
and ψ
r
to zero and
one while at the same time forcing the total number of
ones per ψ
l
and ψ
r
to p, arbitrary dilation structures
in the weight matrix
˜
W can be generated. Formally,
we impose the constraints
ψ
T
l
· 1 ≤ p, ψ
T
r
· 1 ≤ p, (5)
where 1 denotes the all-one vector, yielding to ar-
bitrary dilation-like patterns. Moreover, the dilation
operation can be generalized by defining a matrix
Ψ ∈ {0, 1}
y×y
and defining the new weight matrix as
˜
W = W Ψ (6)
where denotes element-wise multiplication. As in
the previous case, we again impose constraints on the
matrix Ψ as
1
T
Ψ · 1 ≤ p
2
, (7)
Figure 2: Different configurations of the parameters: (a)
Original convolution, (b) Dilation with varying dilation
rates; (c) Dilation in horizontal dimension only; (c) Dilation
in vertical dimension only; (e) Arbitrary dilation kernel.
which assures, that the number of weights unequal to
zero is less or equal to the kernel size. This reparam-
eterization of the weight matrix
˜
W allows for gen-
eralized dilation structures. An illustration of some
examples for the different possible patterns is given
in Figure 2. Particularly, some choices of the pa-
rameters are useful in practice. The original convo-
lution operation (Figure 2 (a)) is obtained by setting
ψ
l
= ψ
r
= [0 1 1 1 0] while a dilation with dilation rate
2 yields ψ
l
= ψ
r
= [1 0 1 0 1]. However, this equidis-
tant choice of the dilation might not be best to obtain
representative features in some cases. This is relaxed
by setting e.g. ψ
l
= [0 1 1 0 1] and ψ
r
= [0 1 1 1 0]
resulting in non-equidistant patterns (see Figure 2 (b))
by incorporating the constraint in Eq. (5). Addition-
ally, other arbitrary dilation patterns can be realized as
shown in Figure 2 (e) by setting Ψ with the constraints
shown in Eq. (7). Higher dilation rates within the
layer can be obtained by setting p << y which results
in applying larger receptive fields. Additionally, con-
sidering multidimensional sequence modelling tasks
where longer time horizon modelling is required, di-
lation patterns as shown in Figure 2 (c) using setting
ψ
l
= [0 1 1 1 0] and ψ
r
= [1 0 1 0 1] can be beneficial.
Similarly, a vertical dilation can be trained (Figure 2
(d)). Ultimately, arbitrary dilation patterns as illus-
trated in Figure 2 (e) can be obtained by setting
Ψ =
1 0 0 1 1
0 0 1 0 0
0 0 0 0 1
1 0 0 0 0
1 0 0 1 1
(8)
which is just restricted by the number of active param-
eters within the dilation kernel as presented in Eq. (7).
Higher dilation rates within the layer can be obtained
by setting p << y which results in applying larger re-
ceptive fields.
Generalized Dilation Structures in Convolutional Neural Networks
81
3.3 End-to-End Training of Dilation
Layers
So far we have introduced general dilation layers as
an extension of the vanilla dilation layers proposed
in (Fisher Yu and Vladlen Koltun, 2016) by defining
suitable masking vectors and the relevant constraint
that is required. However, optimizing the masking
matrix and vectors results in optimizing binary vari-
ables which makes the learning problem combinator-
ical and does not directly allow for gradient based
end-to-end training. To circumvent this, we fol-
low a similar approach as in typical gating mech-
anisms (Hochreiter and Schmidhuber, 1997; Trask
et al., 2018) in that we define continuous vectors
˜
ψ
l
,
˜
ψ
r
∈ R
y
and matrix
˜
Ψ ∈ R
y×y
which are passed
through a sigmoidal activation function, i.e. we de-
fine
ψ
l
= σ(
˜
ψ
l
), ψ
r
= σ(
˜
ψ
r
), Ψ = σ(
˜
Ψ). (9)
Using this reparameterization, the masking vector and
matrix are bounded to the interval [0, 1] and due to
the characteristics of the sigmoid function will tend to
its boundaries as training proceeds. The above repa-
rameterization helps in approximating a discrete op-
timisation problem into a continuous one. Therefore,
we end up with a trainable structure with the standard
set of network parameters ω consisting of the kernel
weights of the convolution and fully connected lay-
ers, and the proposed parameter vectors or matrices
Ψ. Since we now have a continuous approximation
of the binary variables, these can be trained by back-
propagation using off the shelf gradient descent opti-
mizers. However, we have to consider the additional
constraints on the parameters Ψ as given in Eq. (5)
and (7). These constraint have to be fulfilled during
training and hence, should be imposed as hard con-
straints.
In general, various approaches exist to incorpo-
rate hard constraints in stochastic gradient descent al-
gorithms, namely barrier functions, projection meth-
ods and active set methods (Boyd and Vandenberghe,
2004). In this work we propose to use barrier
functions which contribute directly to the gradients
and can approximate a hard constraint if the barrier
penalty is high enough. To this end, we include the
constraints by implementing them as a direct gradi-
ent ∇
C
(Ψ), based only on the layer-inherent masking
matrix Ψ of the form
∇
Ψ
i j
L
b
=b
r
(σ(Ψ
i j
))+b
c
(σ(Ψ
i j
))+b
a
(σ(Ψ
i j
)),
(10)
where Ψ
i j
denotes the elements of Ψ, L
b
denotes the
barrier loss and b
r
, b
c
and b
a
represents the differen-
tiable barrier function calculated over the row, column
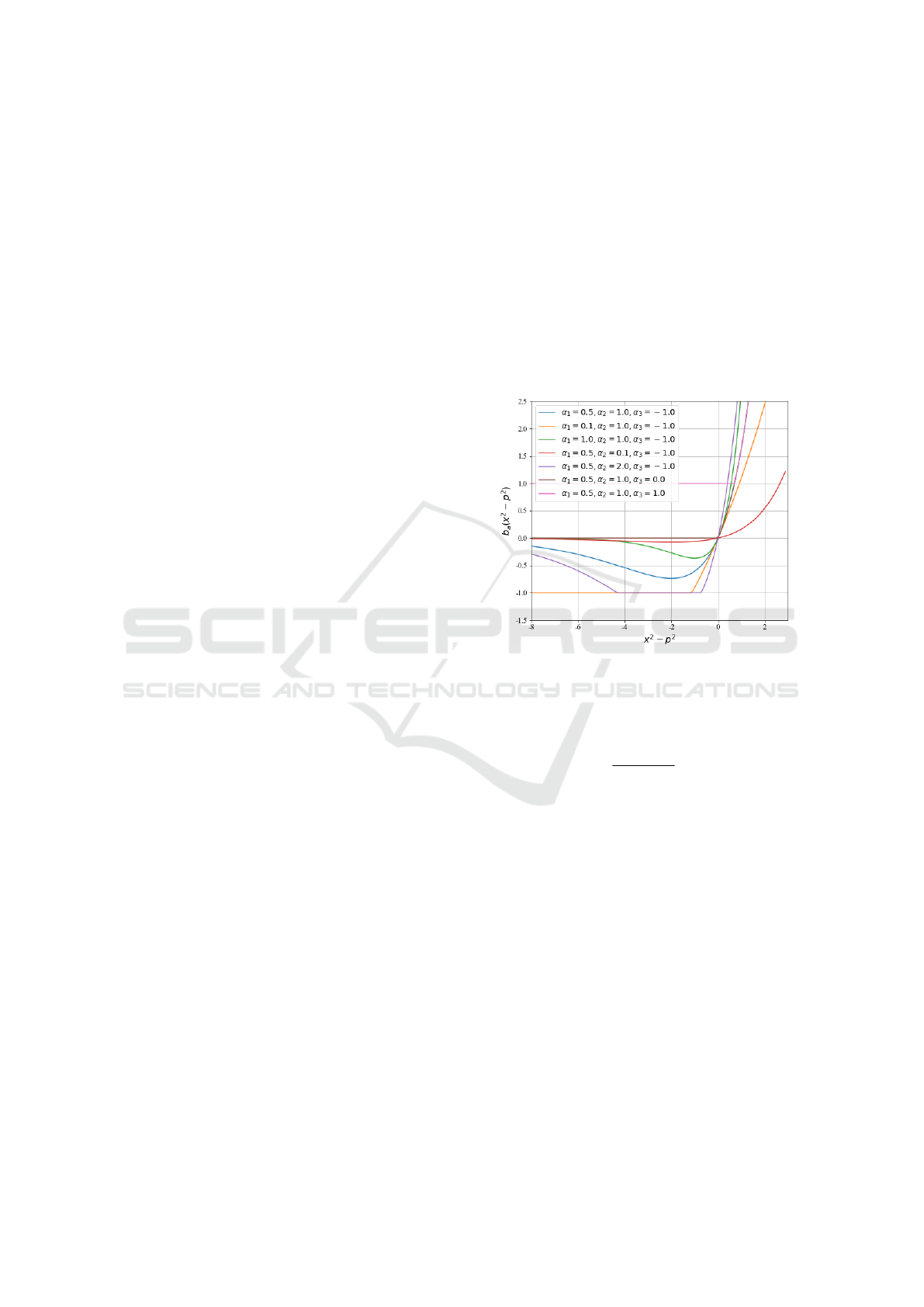
and all entries respectively. The barrier function cho-
sen is a combination of exponential and linear as in
Eq.(11) or quadratic function as in Eq.(12) where the
penalty for exceeding the constraint is higher to keep
the number of total active parameters in check.
b
r
(x)=b
c
(x)=max(e
α
1
·(x−p)
· α
2
· (x − p), α
3
), (11)
b
a
(x)=max(e
α
1
·
(
x
2
−p
2
)
· α
2
·
x
2
− p
2
, α
3
), (12)
Different barrier functions with the different parame-
ters α
1
, α
2
and α
3
are illustrated in Fig. 3. Finally,
Figure 3: Barrier functions with different parameters.
the gradient for end-to-end training of the masking
parameters yields
∇
Ψ
i j
L
g
=
∂L
s
(ω, Ψ)
∂Ψ
i j
+ ∇
Ψ
i j
L
b
, (13)
where L
s
is the classification loss function and L
g
is
the combined loss function. We do not scale the bar-
rier loss L
b
with an additional hyper-parameter, and
use the barrier loss as it is. It can be useful to use
a scaled version of the barrier loss, but this can also
be accomplished with a change in one of the param-
eters α
1
, α
2
and α
3
. Therefore, we test with differ-
ent barrier parameters and not a regularization hyper-
parameter. Since the value of the barrier function is
used directly as the gradient for the masking parame-
ters, negative constraint values (negative in the barrier
function) result in a parameter increase, while positive
constraint values result in a parameter decrease. The
extent to which the masking parameter deviates from
its saturation depends on the both the classification
loss L
s
(ω, Ψ) and barrier loss L
b
.
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
82

3.4 Initialization of Masking
Parameters
The barrier functions are designed such that the gra-
dient increases exponentially if the masking matrices
are over-parameterized. Thus, the boundary condi-
tions cannot be neglected while initializing the ele-
ments in Ψ as large values of b
r
, b
c
and b
a
yield un-
stable gradients. Furthermore, large gradients steer
the parameter rapidly into saturating regions, which
hurts performance. This problem is solved by directly
using the information about kernel and receptive field
size during initialization. The idea is to initialize the
masking parameters in a basin where the gradients are
not huge. Therefore, the parameters can be initialized
such that the total sigmoidal sum of all the elements
in Ψ does not exceed the constrained size of the mask-
ing matrix. Notice, that all barrier values return 0 for
σ(Ψ) = x = p, thus the elements in the masking ma-
trix are initialized by
Ψ = −ln(
y
2
p
2
− 1) ± 1. (14)
This assures, that on average, the total sum of all sig-
moidal parameters does not exceed the field size and
thus does not break any boundary condition during
initialization, since
b
a
(
∑
1
1 + e
ln(
y
2
p
2
−1)
) = b
a
(y
2
·
1
1 + e
ln(
y
2
p
2
−1)
)
(15)
= b
a
(p
2
) = 0 (16)
and
b
r,c
(
∑
1
1 + e
ln(
y
2
p
2
−1)
) = b
r,c
(y ·
1
1 + e
ln(
y
2
p
2
−1)
)
(17)
= b
r,c
(
p
2
y
) < 0. (18)
4 EXPERIMENTS
We test the proposed generalized dilation neural net-
works (GDNN) on two different benchmark image
recognition tasks. We use the MNIST (LeCun et al.,
2010) and CIFAR-10 (Krizhevsky and Hinton, 2010)
data sets and compare the results with baseline net-
works. We analyse the effect of the different elements
in the Generalized Dilation layer and report the results
of the learnt masking and convolution filters.
Figure 4: Accuracy graphs during training and testing over
mini-batches for LeNet and the best performing generalized
dilation network.
4.1 Experimental Results on MNIST
The initial experiments on MNIST were performed as
a sanity check for the proposed architecture. The ar-
chitecture chosen for the experiments was the same as
the LeNet (LeCun et al., 1998) architecture with the
first convolution layer being the generalized dilation
(GD) layer with the receptive field size of y = 9. Both
the architectures were trained for 400 epochs with a
mean test accuracy of 98.41 % and 98.43% for the
GDNN and the LeNet architecture respectively. How-
ever, the accuracy of the proposed method is consis-
tently better during training as illustrated in Fig. 4
where a zoomed in training and testing progress over
mini-batches is shown. Only during the fag end of
the training the standard LeNet architecture improves
its accuracy. After the initial test with MNIST, the
CIFAR-10 dataset was used for a more comprehen-
sive investigation.
4.2 Experimental Results on CIFAR-10
In order to analyze the performance of the GDNN
we chose the SimpleNet network (Hasanpour et al.,
2016) as a baseline architecture to investigate the
performance on the CIFAR-10 dataset. The Adam
(Kingma and Ba, 2014) optimizer with default pa-
rameters (µ = 10
−3
, β
1
= 0.9, β
2
= 0.999, ε = 10
−8
,
λ = 0) was used for 400 training epochs. If not stated
otherwise, we use the same experimental settings and
augmentation methods as in (Hasanpour et al., 2016).
An initial set of experiments were performed to deter-
mine the optimal location of the GD layer in the Sim-
pleNet architecture. The performance of the model
was analysed based on the performance on a held out
validation set. From this analysis, the GD layer was
found to perform best as the second (b2) and fifth (b5)
layer in the SimpleNet architecture for the CIFAR-10
dataset. This points to an observation that in simple
image recognition tasks, the context aggregation fea-
Generalized Dilation Structures in Convolutional Neural Networks
83

Figure 5: Training (top) and testing (bottom) accuracy
graphs for Simplenet for the two best performing general-
ized dilation networks and a combination net with 2 GD
layers.
ture of dilation kernels is useful in the earlier layers
where low level features are captured rather than the
deeper layers. Therefore, all the subsequent experi-
ments were performed with these position of the GD
layer respectively which are represented in the top and
bottom half of the Table 1. We investigate the effect
of: i. Changes in the size of receptive fields and con-
volution kernel, ii. Changes in the type of constraint
namely row, column and all constraints, iii. Changes
in the barrier function parameters namely the α, α
2
and α
3
and, and iv. Change in the number of chan-
nels of the GD layer. The final accuracy and loss
reported in Table 1 are the best obtained values from
the network configuration with the highlighted ones
being the best for the respective position of the GD
layer. Each distinct architecture tested is assigned a
number denoted in the first column with 0 being the
vanilla SimpleNet architecture. We analyze the effect
of individual hyper-parameters which are highlighted
blue in each row. All the individual hyper-parameters
are explained in the caption of Table 1.
The foremost hyperparameter change we tested,
was the size of the receptive field in the GD layer.
A receptive field size of 7 performed generally bet-
ter than the its counterparts for both the GD layer
positions. Alternatively, increasing the channels for
P = 2 yielded a better test accuracy while an increase
in number of channels for P = 5 resulted in a decrease
in accuracy. This can be attributed to the bottleneck
effect where an increase in the number of output chan-
nels at the crucial bottleneck layer deteriorates perfor-
mance. A clear evidence for which type of constraint
to be used is not available since the change in perfor-
mance is not significant enough. The effect of dif-
ferent barrier function parameters α
1
, α
2
and α
3
is
covered in the next section from the initial and learnt
Figure 6: Trained masking matrices (σ(Ψ)) and resulting
convolution kernel matrix for architecture number 3. White
pixels in the masking matrix represent σ(Ψ) = 0, while
black pixels represent σ(Ψ) = 1. Conversely, for the convo-
lution kernel matrix (σ(Ψ) · k), white and black pixels rep-
resent the corresponding minimum and maximum value for
each kernel separately. Notice, that a zero in the masking
matrix results in a constant region in the convolution matrix.
s represents
∑
Ψ
k
, where k indicates the kernel number.
masking matrix distribution, but a stark change in the
final performance of the network is not evident. Tests
were also performed with two GD layers in the same
network resulting in satisfactory performance but not
better than the individual networks. It is evident from
Table 1, that most permutations have a slight effect on
the final test accuracy from the trained network. Apart
from one GDNN network, all other network outper-
form the baseline SimpleNet (denoted by Nr. 0) ar-
chitecture with a higher average test accuracy.
Figure 5 illustrates the training progress of the best
performing architectures (Architecture Number 0, 11,
21 and 11+21) for each case. The figures show a
zoomed in version to better distinguish among the ar-
chitectures. The training progress shows both GDNN
consistently and considerably outperforms the Sim-
pleNet architecture in terms of testing accuracy.
4.2.1 Dilation Kernels and Masking Parameters
A sample of the trained masking matrices and the ef-
fective convolution filters are shown in Fig. 6 as grey-
scale maps where the headings on each of the masking
maps represent the sum of all the sigmoidal parame-
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
84
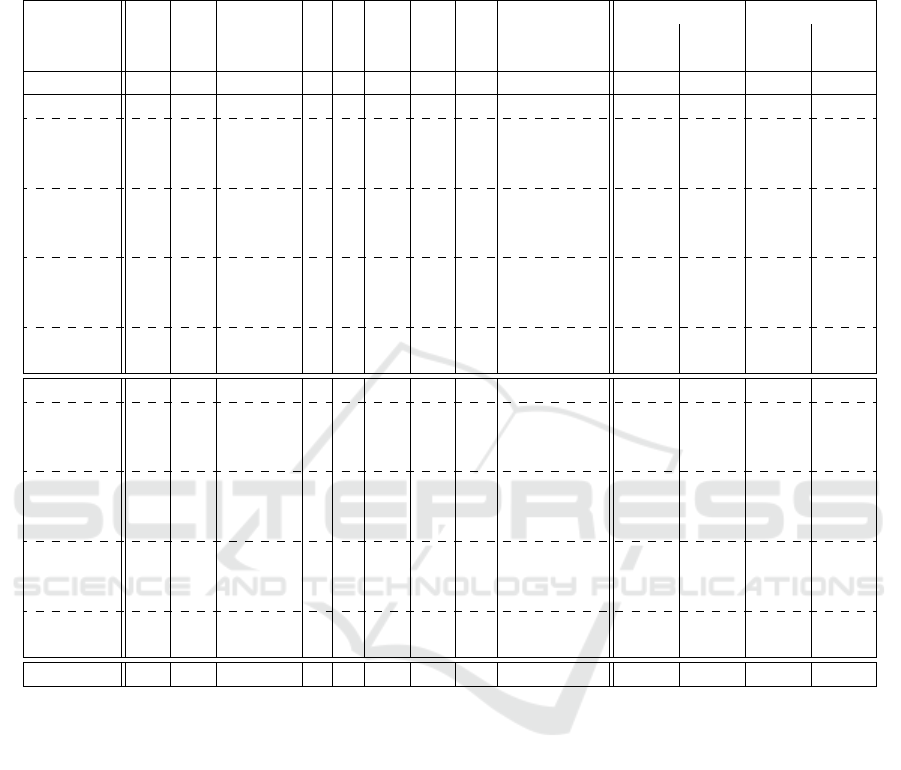
Table 1: Different permutations of network architectures and their final training and testing results. Highlighted entries
represent hyperparameters deviating from the baseline nets and the highest accuracy or lowest loss respectively. Exp. Nr.=
Distinct Architecture Number, P = Position of Generalized Dilation layer, L = Number of GD Layers, C = Number of GD
channels, p = Convolution kernel size, F = Size of Receptive Field, Constraints are defined as r = only rows, c = only columns
and a = all.
Arch. Nr. P L C p F α
1
α
2
α
3
Constraints Train Test
Loss Acc. Loss Acc.
·10
−2
% ·10
−2
%
0 2 - 128 3 - - - - - 0.042 99.98 66.64 91.99
b2 2 1 128 3 7 0.5 1 -1 r,c,a 0.040 99.98 64.74 92.32
1 2 1 128 3 9 0.5 1 -1 r,c,a 0.048 100.0 68.47 91.82
2 2 1 128 5 7 0.5 1 -1 r,c,a 0.088 99.97 66.62 92.38
3 2 1 128 5 9 0.5 1 -1 r,c,a 0.010 100.0 67.84 91.53
4 2 1 128 3 7 0.5 1 -1 r,c 0.045 99.84 61.79 92.15
5 2 1 128 3 7 0.5 1 -1 r 0.053 99.98 64.02 92.23
6 2 1 128 3 7 0.5 1 -1 a 0.068 99.97 64.78 92.15
7 2 1 128 3 7 0.1 1 -1 r,c,a 0.015 100.0 64.67 92.22
8 2 1 128 3 7 0.5 0.1 -1 r,c,a 0.068 99.98 67.06 92.00
9 2 1 128 3 7 0.5 1 0 r, c, a 0.056 99.98 67.37 92.01
10 2 1 64 3 7 0.5 1 -1 r,c,a 0.086 99.97 66.95 91.58
11 2 1 256 3 7 0.5 1 -1 r,c,a 0.018 100.0 66.09 92.48
b5 5 1 256 3 7 0.5 1 -1 r,c,a 0.055 99.97 62.64 91.94
12 5 1 256 3 9 0.5 1 -1 r,c,a 0.026 99.98 62.64 91.56
13 5 1 256 5 7 0.5 1 -1 r,c,a 0.019 100.0 62.28 91.84
14 5 1 256 5 9 0.5 1 -1 r,c,a 0.038 99.97 62.31 92.08
15 5 1 256 3 7 0.5 1 -1 r,c 0.169 99.97 62.47 92.17
16 5 1 256 3 7 0.5 1 -1 r 0.055 99.98 62.91 92.15
17 5 1 256 3 7 0.5 1 -1 a 0.008 100.0 59.03 92.13
18 5 1 256 3 7 0.1 1 -1 r,c,a 0.049 99.98 60.61 91.91
19 5 1 256 3 7 0.5 0.1 -1 r,c,a 0.042 99.98 58.62 92.23
20 5 1 256 3 7 0.5 1 0 r, c, a 0.007 100.0 59.18 92.20
21 5 1 128 3 7 0.5 1 -1 r,c,a 0.206 99.92 59.69 92.44
22 5 1 512 3 7 0.5 1 -1 r,c,a 0.065 99.97 62.99 91.96
11+21 2,5 1,1 128,256 3 7 0.5 1 -1 r,c,a 0.024 99.98 64.19 92.08
ters, layer number, channel number and kernel num-
ber. It is evident here that the optimizer separates out
specific columns and rows, based on the constraints
i.e. the difference between the receptive field size and
the kernel size is big enough. From Fig. 6, a gen-
eralized dilation kernel is clear where only the most
useful parts from the receptive fields are considered
for training the network. This behaviour can be sup-
pressed or emphasized depending on the α and other
barrier parameters. For similar sizes between recep-
tive fields and kernel size, the final masking matrices
tend to be the same value for each entry, since the
constraints are not forcing enough.
To better visualise the training of the proposed
masking matrices, a distribution plot of the initial
and learned masking parameters for solitary GD layer
networks, specifically architecture number 11 and 21
(top and middle) and a network with two GD layers
(bottom) is shown in Figure 7.The initialization was
consistent in all the cases because of the initialization
methodology of Ψ mentioned in Eq. (14). Surpris-
ingly, the layers of the network with two GD layers
are trained to almost the same distribution. This can
be attributed to the specific configuration of barrier
functions where the learned distribution seems to be
the optimal distribution. In the case of two GD layer
network, the barrier function from the last generalized
dilation layer do not have a direct impact on the gra-
dients backpropagated to the previous layers, but the
varying output of the first generalized dilation layer
should result in a different input images for the lat-
ter layers. The fact that the distributions are still the
same can only be interpreted as an optimal solution
for these chosen hyperparameters.
Changing the barrier function hyperparameter α
1
,
results in a small but noticeable difference in clas-
sification accuracy, but the masking distributions
change drastically. The masking distributions from
Generalized Dilation Structures in Convolutional Neural Networks
85
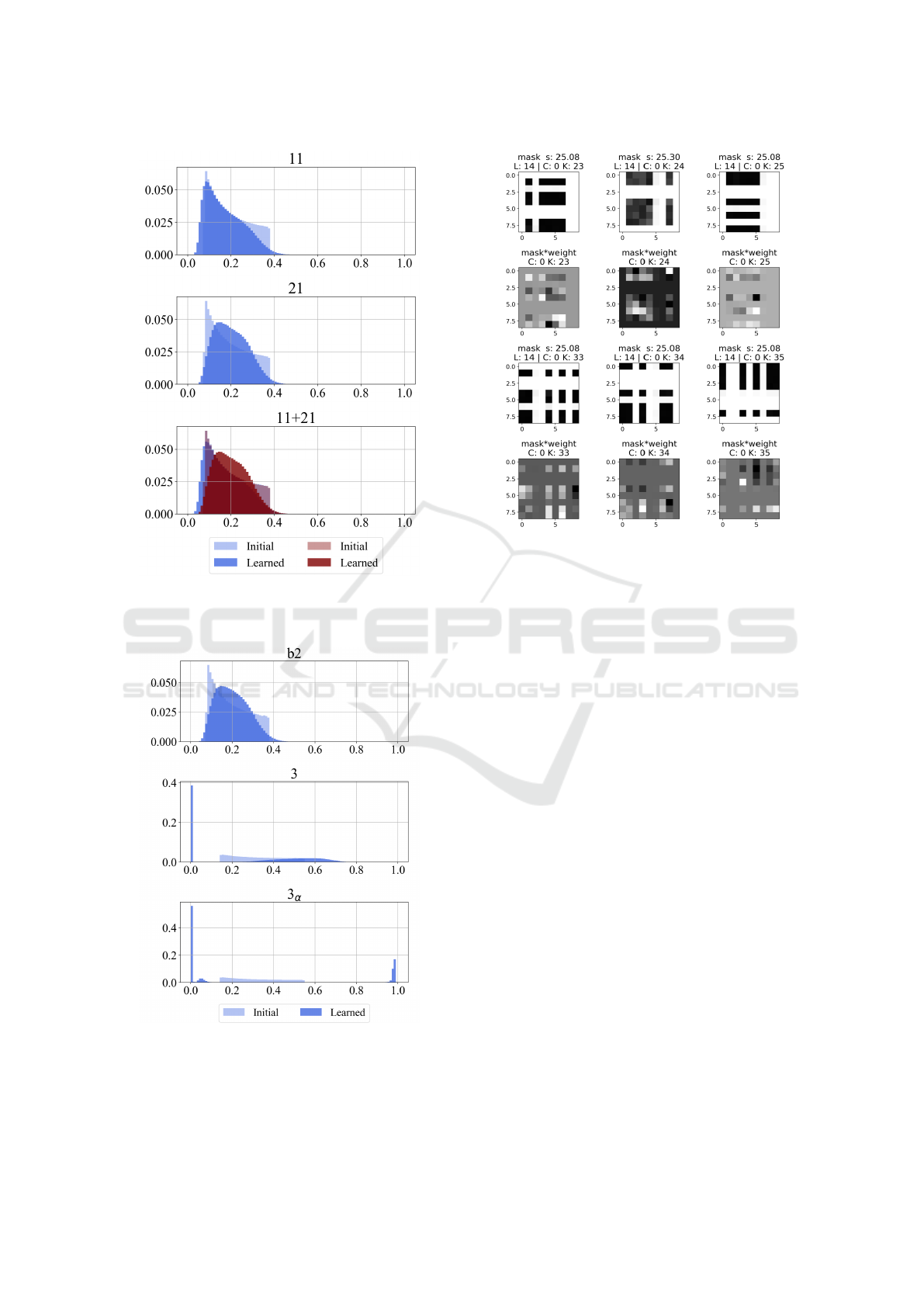
Figure 7: Distribution of masking parameters σ(Ψ) for ar-
chitecture number 11 (top) , 21 (middle) and 11 + 21 (bot-
tom).
Figure 8: Distribution of masking parameters σ(Ψ) for the
architecture number b2 (top), 3 (middle) and 3
α
(bottom).
Figure 9: Trained masking matrices (σ(Ψ)) and resulting
convolution matrix for architecture number 3. White pix-
els in the masking matrix represent σ(Ψ) = 0, while black
pixels represent σ(Ψ) = 1. For the convolution matrix
(σ(Ψ) · k), white and black pixels represent the correspond-
ing minimum and maximum for each kernel separately. No-
tice, that a zero in the masking matrix results in a constant
region in the convolution matrix. s represents
∑
σ(Ψ
k
),
whereas k indicates the kernel number.
architecutre numbers b2, 3 and 3 with an additional
increase in α
1
, from hereon called 3
α
, are shown in
Figure 8. Network b2 has a very similar masking
distribution compared to 11, 21 and 11 + 21 since
all parameters regarding the constraint function are
the same, they only differ in the convolution kernel
and receptive field size. However, the networks 3
and 3
a
show a very different distribution of mask-
ing parameters: σ(Ψ) tends to be close to zero or
one in most cases, pointing to a binary learnt mask-
ings that have converged in choosing specific pixels
completely and ignoring other pixel values. This be-
haviour is also visible in Figure 9 wherein the masks
from architecture 3 have blocked out certain areas of
the feautre maps that are not relevant for the classifi-
cation task. Therefore, with an appropriate choice of
the barrier function parameters, a continuous approx-
imation for a discrete optimization problem has been
demonstrated.
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
86

5 CONCLUSION
We present generalized dilation neural networks, a
sub-module within the CNN architecture augmented
with dilated filters. The generalization to the exist-
ing framework is provided by two extensions. First,
the fixed dilation filters are made learnable by intro-
ducing an alternative continuous representation of the
dilation operation using masking vectors or matrices
which can be trained by standard gradient descent op-
timizers. To this end, we introduce a novel barrier
function approach together with a suitable initializa-
tion scheme to account for the constraints imposed
on the masking parameters. According to the au-
thors, this is the first study which makes use of such
techniques for constraining the dilation operation in a
CNN. Second, we generalize the fixed structure of di-
lation kernels to arbitrary structures, allowing for an
arbitrary coverage of the input space. We provide ex-
perimental evidence by testing the proposed architec-
ture on two benchmark image recognition data-sets.
The learned masking maps and distributions point to
a discrete optimization of parameters using continu-
ous gradient descent methods.
Although not presented in the results, the gener-
alized dilations can also be applied on the whole in-
put image rather than a receptive field, leading to a
form of barrier function based attention. Using this
architecture as the very first layer of a CNN with an
receptive field size equal to the input size, the layer
is forced to select only certain discriminative pixels
from the actual input. Also part of the future work is
the use of barrier function for selecting a certain num-
ber of channels in the convolution layers where com-
plete channels will be masked out from training lead-
ing to a sparse network. On the application side, we
will experiment with GDNN on domains like image
segmentation, object detection and sequential mod-
elling. Such tasks are suitable as the networks need
to produce even denser predictions, for e.g. a predic-
tion for each pixel.
REFERENCES
Bai, S., Kolter, J. Z., and Koltun, V. (2018). An em-
pirical evaluation of generic convolutional and recur-
rent networks for sequence modeling. arXiv preprint
arXiv:1803.01271.
Boyd, S. P. and Vandenberghe, L. (2004). Convex optimiza-
tion. Cambridge University Press, Cambridge.
Carl Lemaire, Andrew Achkar, and Pierre-Marc Jodoin
(2018). Structured pruning of neural networks with
budget-aware regularization. 2019 IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 9100–9108.
Chen, L.-C., Papandreou, G., Schroff, F., and Adam, H. Re-
thinking atrous convolution for semantic image seg-
mentation.
Chen, L.-C., Yang, Y., Wang, J., Xu, W., and Yuille, A. L.
(2016). Attention to scale: Scale-aware semantic im-
age segmentation. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 3640–3649.
Dai, J., Qi, H., Xiong, Y., Li, Y., Zhang, G., Hu, H., and
Wei, Y. (2017). Deformable convolutional networks.
In Proceedings of the IEEE international conference
on computer vision, pages 764–773.
Fisher Yu and Vladlen Koltun (2016). Multi-scale context
aggregation by dilated convolutions. In ICLR.
Fukushima, K. and Miyake, S. (1982). Neocognitron: A
self-organizing neural network model for a mecha-
nism of visual pattern recognition. In Competition and
cooperation in neural nets, pages 267–285. Springer.
Gupta, A. and Rush, A. M. (2017). Dilated convolu-
tions for modeling long-distance genomic dependen-
cies. bioRxiv.
Hasanpour, S. H., Rouhani, M., Fayyaz, M., and Sabokrou,
M. (2016). Lets keep it simple, using simple architec-
tures to outperform deeper and more complex archi-
tectures. arXiv preprint arXiv:1608.06037.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
He, Y., Keuper, M., Schiele, B., and Fritz, M. (2017).
Learning dilation factors for semantic segmentation
of street scenes. In German Conference on Pattern
Recognition, pages 41–51.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural computation, 9(8):1735–1780.
Holschneider, M., Kronland-Martinet, R., Morlet, J., and
Tchamitchian, P. (1990). A real-time algorithm for
signal analysis with the help of the wavelet transform.
In Wavelets, pages 286–297. Springer.
Kingma, D. P. and Ba, J. L. (2014). Adam: Amethod for
stochastic optimization. In Proceedings of the 3rd In-
ternational Conference on Learning Representations
(ICLR).
Krizhevsky, A. and Hinton, G. (2010). Convolutional deep
belief networks on cifar-10. Unpublished manuscript,
40(7).
L. Chen, G. Papandreou, I. Kokkinos, K. Murphy, and A. L.
Yuille (2018). Deeplab: Semantic image segmentation
with deep convolutional nets, atrous convolution, and
fully connected crfs. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 40(4):834–848.
LeCun, Y., Boser, B. E., Denker, J. S., Henderson, D.,
Howard, R. E., Hubbard, W. E., and Jackel, L. D.
(1990). Handwritten digit recognition with a back-
propagation network. In Advances in neural informa-
tion processing systems, pages 396–404.
Generalized Dilation Structures in Convolutional Neural Networks
87

LeCun, Y., Bottou, L., Bengio, Y., and Haffner, P. (1998).
Gradient-based learning applied to document recogni-
tion. Proceedings of the IEEE, 86(11):2278–2324.
LeCun, Y., Cortes, C., and Burges, C. J. (2010). MNIST
handwritten digit database. AT&T Labs [Online].
Available: http://yann. lecun. com/exdb/mnist, 2.
Luo, W., Li, Y., Urtasun, R., and Zemel, R. (2016). Under-
standing the effective receptive field in deep convolu-
tional neural networks. In D. D. Lee, M. Sugiyama,
U. V. Luxburg, I. Guyon, and R. Garnett, editors, Ad-
vances in Neural Information Processing Systems 29,
pages 4898–4906. Curran Associates, Inc.
Sercu, T. and Goel, V. Dense prediction on sequences with
time-dilated convolutions for speech recognition.
Shensa, M. J. (1992). The discrete wavelet transform: wed-
ding the a trous and mallat algorithms. IEEE Transac-
tions on Signal Processing, 40(10):2464–2482.
Strubell, E., Verga, P., Belanger, D., and McCallum, A.
(2017). Fast and accurate entity recognition with iter-
ated dilated convolutions. In Proceedings of the 2017
Conference on Empirical Methods in Natural Lan-
guage Processing, pages 2670–2680, Copenhagen,
Denmark. Association for Computational Linguistics.
Trask, A., Hill, F., Reed, S. E., Rae, J., Dyer, C., and Blun-
som, P. (2018). Neural arithmetic logic units. In
Advances in Neural Information Processing Systems,
pages 8035–8044.
van den Oord, A., Dieleman, S., Zen, H., Simonyan, K.,
Vinyals, O., Graves, A., Kalchbrenner, N., Senior, A.,
and Kavukcuoglu, K. Wavenet: A generative model
for raw audio.
Yu, F., Koltun, V., and Funkhouser, T. (2017). Dilated
residual networks. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 472–480.
Yunho Jeon and Junmo Kim (2017). Active convolution:
Learning the shape of convolution for image classifi-
cation. 2017 IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), pages 1846–1854.
Zhu, X., Hu, H., Lin, S., and Dai, J. (2019). Deformable
convnets v2: More deformable, better results. In Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition, pages 9308–9316.
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
88
