
Autoencoder Watchdog Outlier Detection for Classifiers
Justin Bui and Robert J. Marks II
Department of Electrical and Computer Engineering, Baylor University, Waco, Texas, U.S.A.
Keywords:
Neural Networks, Watchdog, CNN, MNIST, Classifier, Generator, Autoencoder.
Abstract:
Neural networks have often been described as black boxes. A generic neural network trained to differentiate
between kittens and puppies will classify a picture of a kumquat as a kitten or a puppy. An autoencoder
watchdog screens trained classifier/regression machine input candidates before processing, e.g. to first test
whether the neural network input is a puppy or a kitten. Preliminary results are presented using convolutional
neural networks and convolutional autoencoder watchdogs using MNIST images.
1 INTRODUCTION
Akin to principle component analysis (Oja, 1989), au-
toencoders can implicitly learn by the estimation of a
lower dimensional manifold on which training data
lives (Thompson et al., 2002; Thompson et al., 2003).
The feature space dimension is determined by the car-
dinality of the autoencoder’s input and output. The di-
mension of the manifold is dictated by the size of the
bottleneck layer (or waist) of the autoencoder. Repre-
sentative test data presented to a properly trained au-
toencoder will generate an output similar to the input.
More generally, the root mean square error
(RSME) between the autoencoder input and output
can be viewed as the rough distance measurement
between the autoencoder input and the training data
manifold in the feature space. For this reason, autoen-
coders can be used in novelty detection (Guttormsson
et al., 1999; Streifel et al., 1996; Thompson et al.,
2002).
One could train a neural network on three outputs:
kittens, puppies and all other images that are not kit-
tens or puppies. One challenge to this approach is that
the set of images that do not contain kittens or puppies
is prohibitively large. Work done by Abbasi and De-
Vries (Abbasi et al., 2019; DeVries and Taylor, 2018)
suggest strategies to work around the need for these
large datasets.
Use of an autoencoder watchdog is a more reason-
able solution (Streifel et al., 1996), acting as a nov-
elty (or anomaly) detector which protects the classi-
fier neural network from fraudulent inputs. The au-
toencoder generates the manifold of data points that
represent kittens and puppies. Any image lying far
from the manifold is not a kitten or a puppy.
A data point that lies close to the manifold need
not be a kitten or a puppy. Another image may coin-
cidently lie on the manifold. In anomaly detection, a
flag raised by the autoencoder is therefore sufficient
for detecting anomalies but is not necessary for de-
tecting outliers.
2 BACKGROUND
Interest in, and the application of neural networks
(Reed and MarksII, 1999) continues to expand at a
rapid rate and cover a variety of tasks of varying com-
plexities. Yadav et al present an excellent introduction
to the history of neural networks (Yadav et al., 2015).
Autoencoder neural networks are of particular interest
in watchdog novelty detection. They have been used
in a variety of different applications and may be im-
plemented in a variety of different ways. For example,
Baur (Baur et al., 2018) has demonstrated anomaly
detection in medical scans, whereas Alvernaz (Alver-
naz and Togelius, 2017) explored the ability to visu-
ally analyze and learn to play complex videogames.
Vu (Vu et al., 2019) has investigated anomaly detec-
tion using adversarial autoencoders, while Lore (Lore
et al., 2017) has reported their use in low-light image
enhancement applications.
Autoencoders are useful for denoising various
types of data, from udio to medical images. Work
done by Gondara (Gondara, 2016) and Vincent (Vin-
cent et al., 2008) provide excellent examples of the
these denoising techniques. Autoencoders have been
also been used in generative networks, as described by
990
Bui, J. and Marks II, R.
Autoencoder Watchdog Outlier Detection for Classifiers.
DOI: 10.5220/0010300509900996
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 2, pages 990-996
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
Mesheder (Mescheder et al., 2017). Most commonly
used in generative adversarial networks, or GANs,
autoencoders have shown remarkable capabilities in
generating images from noise. Work done by Zhifei
Zhang (Zhang et al., 2017), Zijun Zhang (Zhang et al.,
2020), Huang (Huang et al., 2018), and Ranjan (Ran-
jan et al., 2018) have shown some impressive gen-
erative capabilities across multiple spectrums, from
grayscale digits to 3D face images. Work done by
Luo (Luo et al., 2017) demonstrates different tech-
niques based on the combination of variational au-
toencoders (VAEs) and GANs. Work done by Lu (Lu
et al., 2013), Xia (Xia et al., 2014), and Qi (Qi et al.,
2017) have demonstrated various applications beyond
denoising and generation, highlighting the flexibility
and useability of autoencoders.
As the artificial neural network field continues to
grow and new tools continue to be developed, it is be-
coming easier to develop neural networks without a
deep understanding of the driving principles. These
new tools (eg TensorFlow, PyTorch, Keras, FastAI)
lead to many neural networks being generally treated
as black boxes. Our interest in these black boxes, as
described by Alain et al (Alain and Bengio, 2016),
is less aimed at diving into the inner workings and
attempting to demystify them, but rather to develop
a technique that may be used with both existing and
newly developed neural networks to address the un-
certainty born of opaque neural networks. While there
have been several attempts at diving in to the under-
standing of neural networks, such as the work done
by Schartz (Shwartz-Ziv and Tishby, 2017), Zeiler
(Zeiler and Fergus, 2014), Martin (Martın-Clemente
and Zarzoso, 2016) and Markopoulos (Markopoulos
et al., 2017), much of today’s end products are as-
sumed to be “black boxes”.
While there is no shortage of neural network struc-
tures and applications, our research focuses on convo-
lutional neural networks (CNN’s) and autoencoders.
CNN’s have demonstrated impressive performance in
the classification and generation of data. As an exam-
ple, Zhang (Zhang and LeCun, 2015) provides an ex-
cellent introduction to the concept of text understand-
ing, paralleling the interpretation of hand written dig-
its. Bhatnagar (Bhatnagar et al., 2017) demonstrates
the classification capabilities of CNNs on clothing
items. Other work (Ciresan et al., 2011; Tabik et al.,
2017) further details these capabilities while introduc-
ing new approaches for network design and perfor-
mance optimization.
3 THE NEURAL NETWORK
WATCHDOG
The Neural Network Watchdog is a tool to determine
a neural network’s output validity. This is achieved
by using the generative component of the autoencoder
to reconstruct the input data and calculating a differ-
ence score. The difference score is then compared
to a threshold that determines data validity. In this
paper, we build on the use of autoencoders to create
the generative component of the watchdog. For our
differencing component, the root mean square error
(RMSE: the square root of the sum of the squares)
is calculated and comparing against a fixed thresh-
old. Below are descriptions of the classification
and watchdog autoencoder networks, the training and
evaluation datasets, and the classifier and watchdog
performance analysis.
3.1 Network Structures
For the viability study, both our classifier and autoen-
coder are CNN’s. Work by LeCun (LeCun et al.,
2015), Ng (Ng et al., 2011), and Meng (Meng et al.,
2017) provide an excellent foundation for designing
such networks. The MNIST handwritten digit im-
age dataset is used to train the neural network and its
watchdog autoencoder.
3.1.1 The Autoencoder Watchdog
The CNN autoencoder is comprised of a convolu-
tional encoder network, coupled with a decoding net-
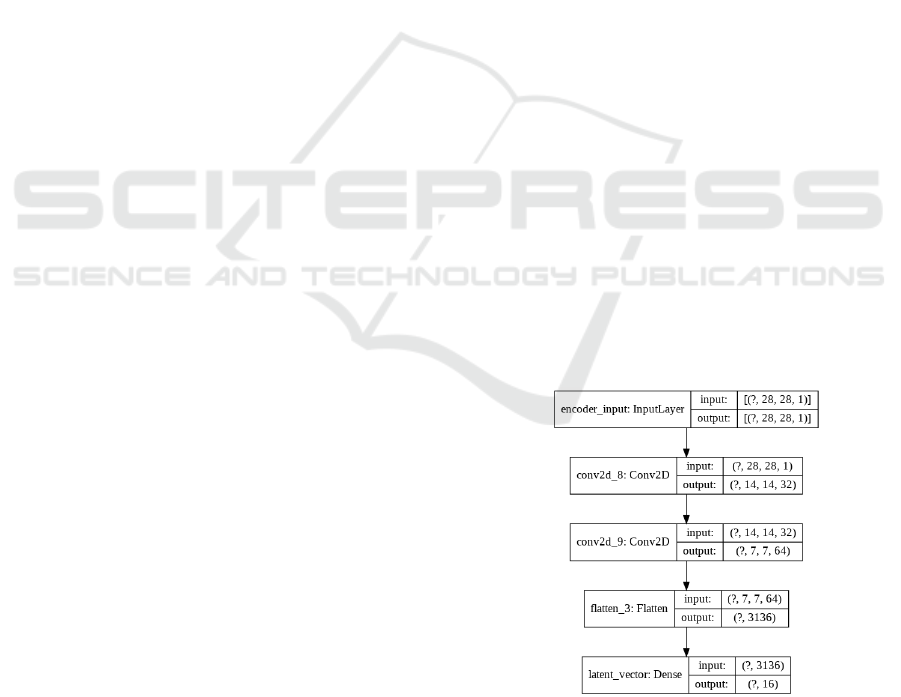
work. The encoder structure is shown in Figure. 1.
Figure 1: The encoder is comprised of two 2D convolution
layers, one flatten layer, and one dense layer. This produces
a lower dimension representation of the input data.
The decoding structure mirrors the encoder structure,
as shown in Figure. 2. The encoder and decoder struc-
Autoencoder Watchdog Outlier Detection for Classifiers
991
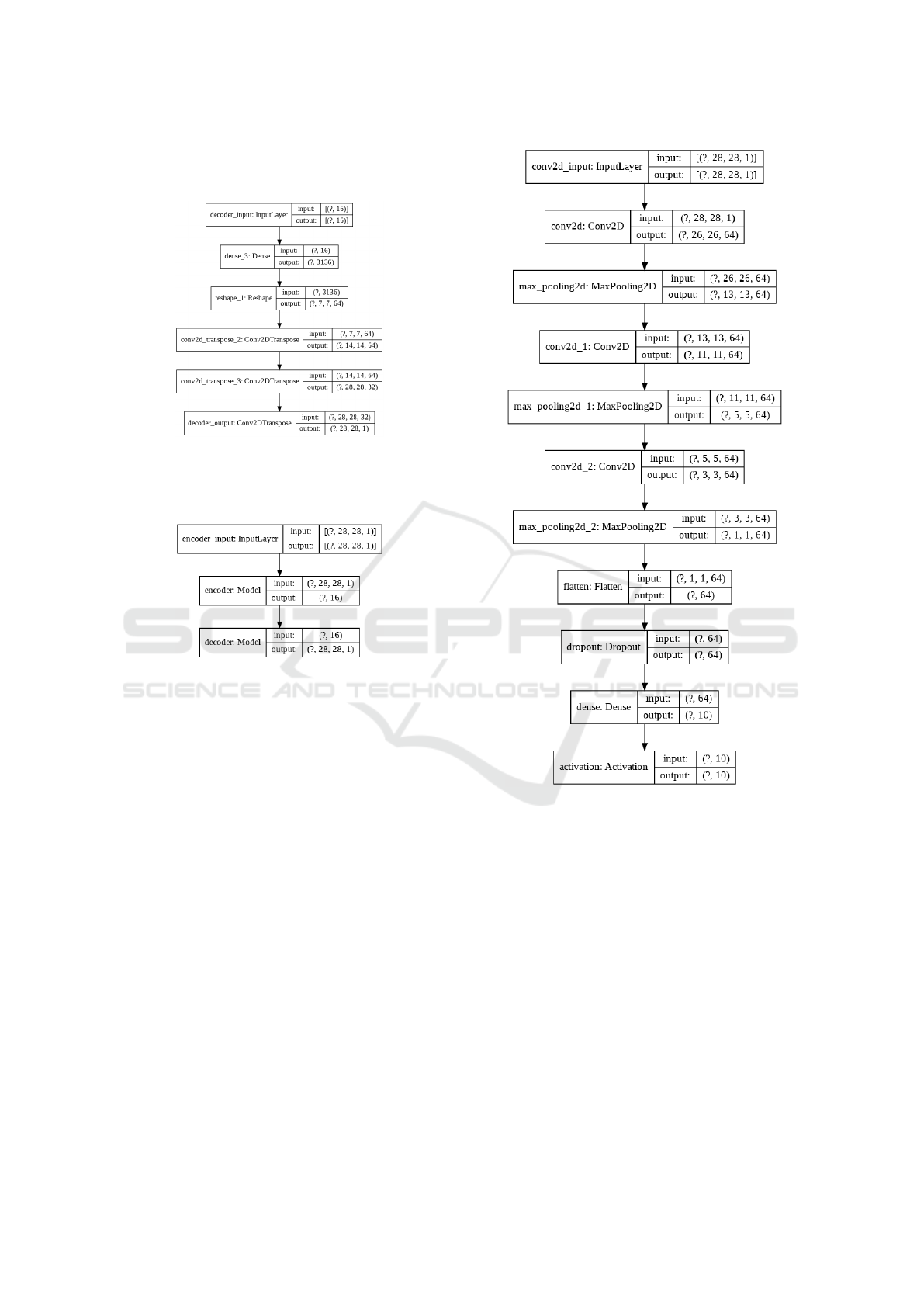
tures are stacked to form the autoencoder. The result-
ing structure is shown in Figure. 3.
Figure 2: The decoder, which mirrors the encoder network.
By matching the encoder’s structure, the decoder can repro-
duce data structurally identical to the encoder input using
the lower dimension representation created by the encoder.
Figure 3: The autoencoder, comprised of the encoder and
decoder, allows the watchdog to generate input data based
on the representations created at the waist layer.
3.1.2 Convolutional Neural Network Structure
As demonstrated by Ciresan (Ciresan et al., 2011),
Tabik (Tabik et al., 2017), and Bhatnagar (Bhatna-
gar et al., 2017), CNNs have shown impressive image
classification capabilities. Our convolutional neural
network classifier, described in Figure 4, is modeled
after an example CNN provided by Geron in (G
´
eron,
2019).
3.2 Training the Networks
3.2.1 Training and Evaluation Datasets
With the structures of the networks established,
we turn to identifying the training and evaluation
datasets. The training data comes entirely from the
MNIST handwritten digit dataset, and consists of
60,000 training and 10,000 test images evenly split
across 10 classes of digits, 0-9. The evaluation dataset
is augmented to include the fashion MNIST dataset
Figure 4: Classification convolutional neural network struc-
ture, comprised of 3 Layers of 2D convolutions paired with
2D max pooling, one flatten layer, and one dropout layer,
with a softmax activation layer.
test images. First introduced by Xiao in 2017 (Xiao
et al., 2017), the fashion MNIST dataset is comprised
of 70,000 total images, evenly distributed across 10
classes of different clothing types. These datasets
were chosen due to their identical size, allowing for
their easy use in the training and testing of both the
autoencoder and classifier without modification. Both
the autoencoder and the CNN were trained on 50,000
digit image dataset and validated on an additional
10,000 digit images from the training set. Examples
of the training data are shown in Figures. 5a and 5b.
In order to evaluate the effectiveness of the clas-
sifier and its watchdog, three evaluation datasets are
used. The evaluation datasets are the combination of
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
992

test images from the digit and fashion image sets. Ad-
ditional examples can be seen in Figures. 6a and 6b.
Note that the evaluation images are separate from the
training and validation datasets. The three datasets
are as follows: in-distribution (digit images), out-of-
distribution (fashion images), and mixed-distribution
(both digit and fashion images).
1. 10,000 test images from the MNIST digit dataset,
in-distribution data
2. 10,000 test images from the fashion MNIST
dataset, out-of-distribution data
3. 20,000 test images resulting from the combina-
tion of the MNIST digit and fashion MNIST test
datasets, mixed-distribution data
4 EVALUATING THE
NETWORKS
4.1 Evaluating the Autoencoder
With the three evaluation datasets established, the
performance of the autoencoder is examined. The
MNIST digit and fashion MNIST datasets are passed
through the autoencoder independently. The outputs
of the autoencoder, examples of which can be seen
in Figures. 7a, 7b, 8a, and 8b, were then stored sepa-
rately for additional analysis. The resulting generated
images were then compared to their respective origi-
nal images and the RMSE was calculated. In order to
determine the range of values expected when calculat-
ing the RMSE, multiply the image size, 28x28x1 pix-
els, by the maximum pixel value, which has been nor-
malized to values between 0 and 1. For this dataset,
the range of RMSE values is between 0 and 28, with a
RMSE of 0 representing a perfect match, and a RMSE
of 28 representing a perfect mismatch. Based on our
experimentation, the average RMSE value calculated
for the MNIST digit dataset was approximately 2.4,
and the average RMSE value calculated for the fash-
ion MNIST dataset was approximately 7.9.
4.2 Performance of the Watchdog
4.2.1 ROC Curves and Classification Errors
In order to show the effectiveness of the watchdog,
we produce receiver operator characteristic (ROC)
curves. These curve show the tradeoff between the
true positive vs. false positive rates. The rates are
determined as:
(a) An example of the
MNIST digit 7
(b) An example of the
MNIST digit 4
Figure 5: MNIST digit image examples.
(a) An example of the fash-
ion MNIST jacket class
(b) An example of the fash-
ion MNIST pants class
Figure 6: Fashion MNIST image examples.
(a) Watchdog regeneration
of the in-distribution digit
7
(b) Watchdog regeneration
of the in-distribution digit
4
Figure 7: Watchdog autoencoder regeneration of the in-
distribution MNIST digit images.
(a) Watchdog regeneration
of the out-of-distribution
jacket image.
(b) Watchdog regeneration
of the out-of-distribution
pants image
Figure 8: Watchdog autoencoder regeneration of the out-of-
distribution fashion MNIST images.
T PR = T P/(T P + FN) (1)
FPR = FP/(FP + T N) (2)
Autoencoder Watchdog Outlier Detection for Classifiers
993
where:
• TP - True Positive = correct classification, the in-
distribution inputs that are within the acceptance
threshold
• FP - False Positive = incorrect classification, the
out-of-distribution inputs are within the accep-
tance threshold
• FN - False Negative = incorrect classification,
the out-of-distribution inputs are above the accep-
tance threshold
• TN - True Negative = correct classification, the
in-distribution inputs are above the acceptance
threshold
With the average RMSE values established, the next
step is determining an appropriate threshold. Fig-
ure. 9 shows the ROC curve for the watchdog autoen-
coder. This curve is the evaluation of the watchdog
autoencoder based on its ability to separate the in-
distribution digit images, or true positives, from out-
of-distribution fashion images, or false positives.
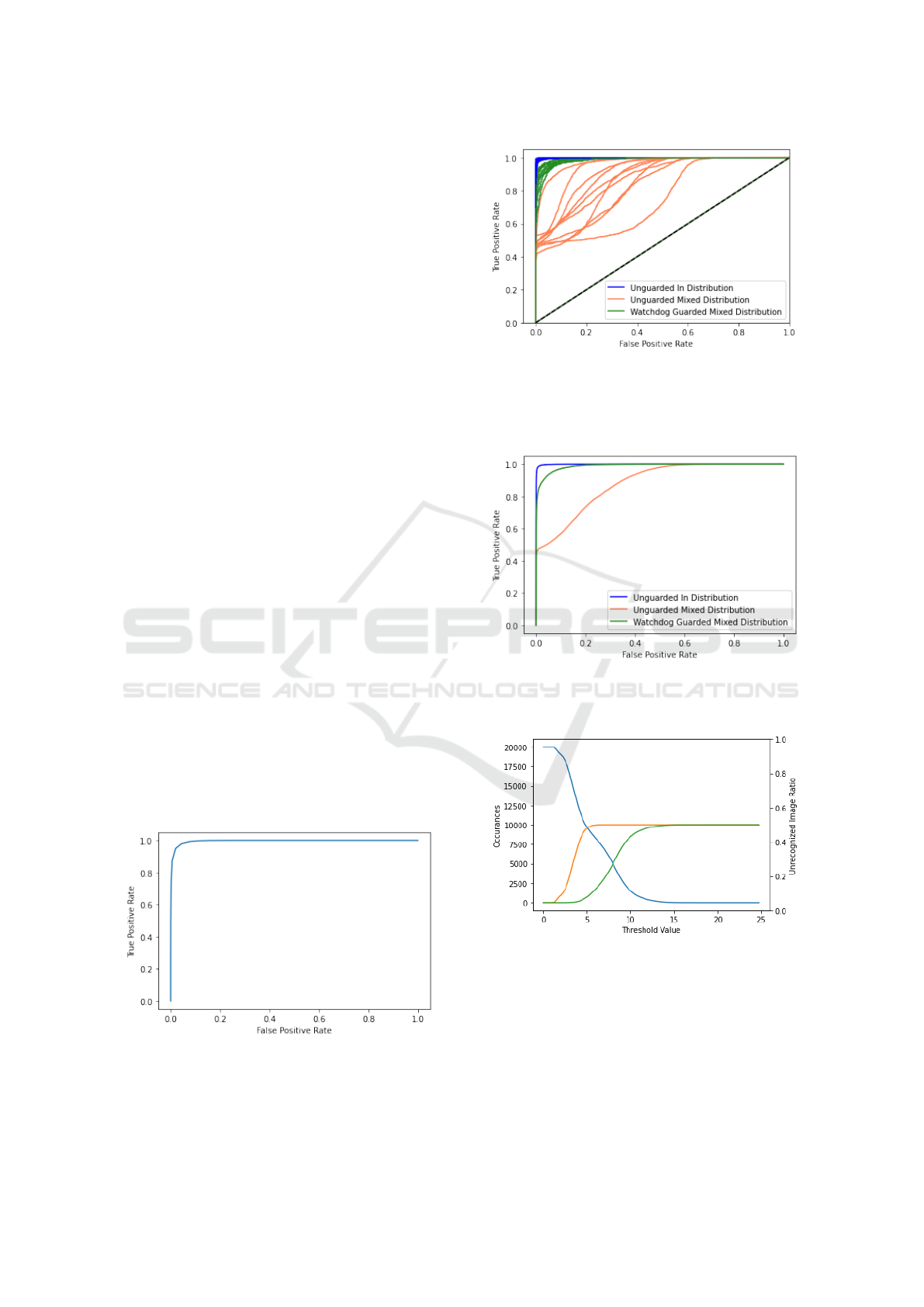
4.2.2 Monitoring the Classifier with the
Watchdog Autoencoder
The value of adding the autoencoder watchdog to
the mixed-distribution dataset can be seen in Fig-
ure. 10 where the guarded mixed-distribution dataset
has better performance than the unguarded mixed-
distribution. As a point of reference, the ideal
scenario, data contained only in the in-distribution
dataset, has been included in Figure. 10. As we have
shown, the results from the watchdog produce a more
accurate true positive vs. false positive rate, and a
more vertical ROC curve, when compared to the indi-
vidual dataset performance.
Figure 9: The ROC plot showing the performance of the
watchdog using the mixed-distribution dataset. This curve
has been produced based on the watchdog’s ability to differ-
entiate between in-distribution and out-of-distribution data
as a function of RMSE threshold.
Figure 10: The ROC plots showing the watchdog perfor-
mance on the three evaluation datasets. Blue indicates un-
guarded in-distribution performance, Orange indicates un-
guarded mixed-distribution performance, and Green indi-
cates guarded mixed-distribution performance.
Figure 11: The averaged ROC plots of the unguarded
in-distribution, unguarded mixed-distribution, and guarded
mixed-distribution plots, as seen in Figure. 10 above.
Figure 12: The distribution of images as a function of
RMSE threshold. Blue represents unrecognized images
(images that exceed RMSE threshold), orange represents in-
distribution images (True Positives), and green represents
out-of-distribution images (False Positives).
Along with the ROC curves, an interesting metric to
note is the number of unrecognized images that have
been detected in the dataset. The number of unrec-
ognized images and the unrecognized image ratio, as
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
994

seen in Figure. 12, can be used as tools to help de-
termine a final threshold value when designing and
developing watchdog guarded networks.
5 CONCLUSION
An initial proof of concept neural network watch-
dog is proposed to help improve the performance
of classifiers on various datasets. The approach is
also transparently applicable to regression neural net-
works. The choice of RMSE threshold is ultimately
determined by the desired detection versus false alarm
tradeoff. Alternately, the RMSE can be used to in-
form users of a measure of closeness of an input to
the manifold of the watchdog autoencoder defined in-
distribution manifold in feature space.
REFERENCES
Abbasi, M., Shui, C., Rajabi, A., Gagne, C., and Bobba,
R. (2019). Toward metrics for differentiating out-of-
distribution sets. arXiv preprint arXiv:1910.08650.
Alain, G. and Bengio, Y. (2016). Understanding intermedi-
ate layers using linear classifier probes. arXiv preprint
arXiv:1610.01644.
Alvernaz, S. and Togelius, J. (2017). Autoencoder-
augmented neuroevolution for visual doom playing.
In 2017 IEEE Conference on Computational Intelli-
gence and Games (CIG), pages 1–8. IEEE.
Baur, C., Wiestler, B., Albarqouni, S., and Navab, N.
(2018). Deep autoencoding models for unsupervised
anomaly segmentation in brain mr images. In Inter-
national MICCAI Brainlesion Workshop, pages 161–
169. Springer.
Bhatnagar, S., Ghosal, D., and Kolekar, M. H. (2017).
Classification of fashion article images using convolu-
tional neural networks. In 2017 Fourth International
Conference on Image Information Processing (ICIIP),
pages 1–6. IEEE.
Ciresan, D. C., Meier, U., Masci, J., Gambardella, L. M.,
and Schmidhuber, J. (2011). Flexible, high perfor-
mance convolutional neural networks for image clas-
sification. In Twenty-second international joint con-
ference on artificial intelligence.
DeVries, T. and Taylor, G. W. (2018). Learning confidence
for out-of-distribution detection in neural networks.
arXiv preprint arXiv:1802.04865.
G
´
eron, A. (2019). Hands-on machine learning with Scikit-
Learn, Keras, and TensorFlow: Concepts, tools, and
techniques to build intelligent systems. O’Reilly Me-
dia.
Gondara, L. (2016). Medical image denoising using convo-
lutional denoising autoencoders. In 2016 IEEE 16th
International Conference on Data Mining Workshops
(ICDMW), pages 241–246. IEEE.
Guttormsson, S. E., Marks, R., El-Sharkawi, M., and Ker-
szenbaum, I. (1999). Elliptical novelty grouping for
on-line short-turn detection of excited running rotors.
IEEE Transactions on Energy Conversion, 14(1):16–
22.
Huang, H., He, R., Sun, Z., Tan, T., et al. (2018). In-
trovae: Introspective variational autoencoders for pho-
tographic image synthesis. In Advances in neural in-
formation processing systems, pages 52–63.
LeCun, Y., Bengio, Y., and Hinton, G. (2015). Deep learn-
ing. nature, 521(7553):436–444.
Lore, K. G., Akintayo, A., and Sarkar, S. (2017). Llnet: A
deep autoencoder approach to natural low-light image
enhancement. Pattern Recognition, 61:650–662.
Lu, X., Tsao, Y., Matsuda, S., and Hori, C. (2013). Speech
enhancement based on deep denoising autoencoder. In
Interspeech, volume 2013, pages 436–440.
Luo, J., Xu, Y., Tang, C., and Lv, J. (2017). Learning inverse
mapping by autoencoder based generative adversarial
nets. In International Conference on Neural Informa-
tion Processing, pages 207–216. Springer.
Markopoulos, P. P., Kundu, S., Chamadia, S., and Pados,
D. A. (2017). Efficient l1-norm principal-component
analysis via bit flipping. IEEE Transactions on Signal
Processing, 65(16):4252–4264.
Martın-Clemente, R. and Zarzoso, V. (2016). On the link
between l1-pca and ica. IEEE transactions on pattern
analysis and machine intelligence, 39(3):515–528.
Meng, Q., Catchpoole, D., Skillicom, D., and Kennedy, P. J.
(2017). Relational autoencoder for feature extraction.
In 2017 International Joint Conference on Neural Net-
works (IJCNN), pages 364–371. IEEE.
Mescheder, L., Nowozin, S., and Geiger, A. (2017). Ad-
versarial variational bayes: Unifying variational au-
toencoders and generative adversarial networks. arXiv
preprint arXiv:1701.04722.
Ng, A. et al. (2011). Sparse autoencoder. CS294A Lecture
notes, 72(2011):1–19.
Oja, E. (1989). Neural networks, principal components, and
subspaces. International journal of neural systems,
1(01):61–68.
Qi, Y., Shen, C., Wang, D., Shi, J., Jiang, X., and Zhu, Z.
(2017). Stacked sparse autoencoder-based deep net-
work for fault diagnosis of rotating machinery. Ieee
Access, 5:15066–15079.
Ranjan, A., Bolkart, T., Sanyal, S., and Black, M. J. (2018).
Generating 3d faces using convolutional mesh autoen-
coders. In Proceedings of the European Conference
on Computer Vision (ECCV), pages 704–720.
Reed, R. and MarksII, R. J. (1999). Neural smithing: su-
pervised learning in feedforward artificial neural net-
works. Mit Press.
Shwartz-Ziv, R. and Tishby, N. (2017). Opening the black
box of deep neural networks via information. arXiv
preprint arXiv:1703.00810.
Streifel, R. J., Marks, R., El-Sharkawi, M., and Kerszen-
baum, I. (1996). Detection of shorted-turns in the
field winding of turbine-generator rotors using novelty
detectors-development and field test. IEEE Transac-
tions on Energy Conversion, 11(2):312–317.
Autoencoder Watchdog Outlier Detection for Classifiers
995

Tabik, S., Peralta, D., Herrera-Poyatos, A., and Herrera, F.
(2017). A snapshot of image pre-processing for con-
volutional neural networks: case study of mnist. Inter-
national Journal of Computational Intelligence Sys-
tems, 10(1):555–568.
Thompson, B. B., Marks, R., and El-Sharkawi, M. A.
(2003). On the contractive nature of autoencoders:
Application to missing sensor restoration. In Proceed-
ings of the International Joint Conference on Neural
Networks, 2003., volume 4, pages 3011–3016. IEEE.
Thompson, B. B., Marks, R. J., Choi, J. J., El-Sharkawi,
M. A., Huang, M.-Y., and Bunje, C. (2002). Im-
plicit learning in autoencoder novelty assessment. In
Proceedings of the 2002 International Joint Con-
ference on Neural Networks. IJCNN’02 (Cat. No.
02CH37290), volume 3, pages 2878–2883. IEEE.
Vincent, P., Larochelle, H., Bengio, Y., and Manzagol, P.-
A. (2008). Extracting and composing robust features
with denoising autoencoders. In Proceedings of the
25th international conference on Machine learning,
pages 1096–1103.
Vu, H. S., Ueta, D., Hashimoto, K., Maeno, K., Pranata,
S., and Shen, S. M. (2019). Anomaly detection
with adversarial dual autoencoders. arXiv preprint
arXiv:1902.06924.
Xia, R., Deng, J., Schuller, B., and Liu, Y. (2014). Model-
ing gender information for emotion recognition using
denoising autoencoder. In 2014 IEEE International
Conference on Acoustics, Speech and Signal Process-
ing (ICASSP), pages 990–994. IEEE.
Xiao, H., Rasul, K., and Vollgraf, R. (2017). Fashion-
mnist: a novel image dataset for benchmark-
ing machine learning algorithms. arXiv preprint
arXiv:1708.07747.
Yadav, N., Yadav, A., and Kumar, M. (2015). History of
neural networks. In An Introduction to Neural Net-
work Methods for Differential Equations, pages 13–
15. Springer.
Zeiler, M. D. and Fergus, R. (2014). Visualizing and under-
standing convolutional networks. In European confer-
ence on computer vision, pages 818–833. Springer.
Zhang, X. and LeCun, Y. (2015). Text understanding from
scratch. arXiv preprint arXiv:1502.01710.
Zhang, Z., Song, Y., and Qi, H. (2017). Gans powered by
autoencoding a theoretic reasoning. In ICML Work-
shop on Implicit Models.
Zhang, Z., Zhang, R., Li, Z., Bengio, Y., and Paull, L.
(2020). Perceptual generative autoencoders. In In-
ternational Conference on Machine Learning, pages
11298–11306. PMLR.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
996
