
Convolutional Neural Networks with Fixed Weights
Tyler C. Folsom
a
School of STEM, University of Washington, 18115 Campus Way NE,
Mail Stop 358534, Bothell, WA 98011, U.S.A.
Keywords: Biological Vision, Deep Convolutional Neural Networks, Functional Neuroanatomy, Image Compression,
Image Understanding, Image Convolutions.
Abstract: Improved computational power has enabled artificial neural networks to achieve great success through deep
learning. However, visual classification is brittle; networks can be easily confused when a small amount of
noise is added to an image. This position paper raises the hypothesis that using all the pixels of an image is
wasteful of resources and unstable. Biological neural networks achieve greater success, and the outline of
their architecture is well understood and reviewed in this paper. It would behove deep learning network
architectures to take additional inspiration from biology to reduce the dimensionality of images and video.
Pixels strike the retina, but are convolved before they get to the brain. It has been demonstrated that a set of
five filters retains key visual information while achieving compression by an order of magnitude. This paper
presents those filters. We propose that images should be pre-processed with a fixed weight convolution that
mimics the filtering performed in the retina and primary visual cortex. Deep learning would then be applied
to the smaller filtered image.
1 INTRODUCTION
The human brain has always been compared to the
dominant technology of the time (Daugman 1990).
The brain has been likened to clockwork, the
telegraph, a telephone switchboard or a digital
computer. It is none of these things. Inspiration from
biology dates to the early years of computing
(McCulloch and Pitts 1943) (von Neuman 1945,
1958). An artificial neuron, the perceptron, was
formulated in 1958 (Rosenblatt 1958). It attracted
much interest until 1969 with the publication of
Perceptrons showing that a single layer neural
network was only capable of doing linear
classifications (Minsky and Papert 1969). The authors
noted that it would be possible to extend the
perceptron to multiple layers, but the mathematics for
error backpropagation was not available and they
conjectured that the extension would be sterile.
Ironically, the multilayer backpropogation problem
was solved in the same year, but in a different context
(Bryson and Ho, 1975).
Neural networks were reborn in the 1980s
(Hopfield 1982), (Hinton 1987) (Rumelhart and
a
https://orcid.org/0000-0003-3981-6886
McClelland 1986). The difficulty of visual processing
was not appreciated until a rigorous analysis of the
problem was given (Marr 1982). Neural networks
were effective in some areas, but hand-crafted
algorithms remained more effective for computer
vision until the emergence of computation systems
that can fully exploit machine learning.
Increased computation power has enabled deep
learning systems to outperform hand-crafted
algorithms in several cases. Tensor Flow and other
specialized systems have enabled neural network
systems with more than a dozen layers to perform
well in image classification, recognition and
segmentation tasks (Badrinarayanan et al, 2016)
(Rasouli 2020) (Elgendy 2020). The outputs of a
network layer may be fully connected to the next
layer, or they may be convolutional, in which outputs
from adjacent neurons are clustered. In deep learning
systems, the network weights may start from random
and be adjusted for maximum performance on a given
task. Alternatively, a network may start with weights
that work well for a specific application and be
modified to perform another task.
516
Folsom, T.
Convolutional Neural Networks with Fixed Weights.
DOI: 10.5220/0010286805160523
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
516-523
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

However, it is difficult to verify that a neural
network has really learned what was intended to be
taught. The usual procedure is to train a network on a
set of images, and then present it with images that it
has not seen to test whether it generalizes. A
1000x1500 colour image contains 36,000,000 bits.
Only a small fraction of the 36 million possible
images can be tested.
Introducing a small amount of noise to an image
produces an image that looks identical to a human.
However, it can cause a neural network to wildly
misclassify it. Images that are meaningless to a
human may be classified with high confidence by a
deep neural network (Szegedy et al. 2014) (Nguyen
et al. 2015). Images contain much redundant data.
Classification errors may be reduced by filtering the
image to eliminate noise and clutter.
Artificial neural networks are loosely based on the
processing in biological systems but with significant
simplifications. The mammalian visual system has
evolved successful strategies for understanding visual
information. It applies filters to the visual stimuli.
Machine vision could benefit from a closer look at
biological vision.
This paper first gives a review of some of the
signal processing techniques used in biological
systems for image understanding. It then examines
the workings of a non-pixel machine vision
algorithm. We present the filters used by this
algorithm, which appears to retain relevant image
features while discarding noise and reducing
dimensionality by an order of magnitude. It is
suggested that images be pre-processed by the filters
used by this algorithm before being input to a deep
learning system.
2 BACKGROUND: BIOLOGICAL
VISION
One of the most striking differences from biology is
that machine vision is based on pixels. Pixels never
make it out of the eye. All vision in the brain is based
on signals that have been convolved to a pixel-less
representation. When these signals reach the primary
visual cortex, they undergo a second convolution. All
visual processing appears to be based on signals that
have undergone this transformation.
We suggest that there is no need for a neural
network to relearn the basic convolutions performed
by the eye and primary visual cortex. The first one or
two convolutional layers of vision are fixed in
biological systems and have no plasticity beyond
infanthood. Using fixed weights in the initial layer
reduces the dimensionality of the image by an order
of magnitude without sacrificing useful information.
Some of the relevant points of mammalian vision
are given below
2.1 Receptive Fields
Hubel and Wiesel received the Nobel prize for
demonstrating that individual neurons in the cat retina
responded to a difference in contrast in a small
circular region of the visual field (Hubel and Wiesel,
1977). This transformation can be modelled as a
circular difference of Gaussians (DOG) or by several
other models.
There are five types of neurons in the retina,
starting with the rod and cone photoreceptors and
culminating in the ganglion cells. A receptive field of
a retinal ganglion cell is defined to be that area of the
visual field in which a change of illumination will
result in a change in the signal transmitted by the
nerve cell. Retinal receptive fields have two
antagonistic subfields. A bright spot striking the
centre may result in an increased output, while
increased illumination in the outer annular region will
result in a decreased signal. The DOG model
represents the inner region as a Gaussian with a
narrow extent and the outer region as a Gaussian with
a wider extent.
The axons of retinal ganglion cells form the optic
nerve over which visual information is transmitted to
the brain. If a receptive field has uniform contrast, it
transmits no signal. The brain gets strong signals from
areas of high contrast.
2.2 Cortical Transformations
Upon reaching the primary visual cortex (V1) the
retinal signals are again convolved to be sensitive to
oriented edges, disparity and speed (Kandel et al.,
2013). These patterns are largely invariant across
individuals and across species.
This convolution can be modelled by a Gabor
function, which is a sine wave modulated by a
circularly rotated Gaussian. A Gabor function is
shown in Figure 1. Several other models fit the data.
The receptive field corresponding to a simple
cortical cell is selective for step edges or bars. The
response will vary based on the position, orientation,
contrast, width, motion or binocular disparity of the
stimulus.
Convolutional Neural Networks with Fixed Weights
517
Figure 1: Gabor Function.
2.3 Simple and Complex Cells
Primary visual cortex contains both linear simple
cells and non-linear complex cells (Antolik and
Bednar 2011). The simple cells respond to different
phases of a sine grating, but the complex cells do not.
The complex cells are independent of the exact
position of the stimulus to which they respond. The
function of simple cells is better understood than that
of complex cells.
2.4 Retinotopic Maps
Signals that are close together in the visual field
remain close together at higher layers of brain
processing. Cells are precisely organized into
modules (Miikkulainen, 2005). Retinotopic brain
organization extends to higher levels (Gattass et al.,
2005). This idea is replicated in the layouts
commonly used for convolutional neural networks
(CNN). The strength of a signal from a neuron may
be amplified or attenuated based on lateral inhibition
or excitation from adjacent neurons (Nabet & Pinter
1991).
2.5 Image Compression
The retina has 87 million rods and 4.6 million cones
(Lamb 2015). These are processed in the eye and
leave as the axons of the ganglion cells that form the
optic nerve. The optic nerve has only 1 million fibres
(Levine, 1985).
2.6 Separate Paths
The optic nerve goes to the lateral geniculate nucleus
(LGN) of the thalamus and then travels to the primary
visual cortex (V1). At the thalamus, the signals
separate into a parvocellular path, which is largely
devoted to form, detail and colour, and a
magnocellular path, which is largely devoted to
motion. These paths remain separate through V1, V2
and V3. The parvocellular path splits off to V3a, V4
(which also receives magnocellular data) and the
Inferior Temporal area. From V3 the magnocellular
path goes to V5, Posterior Parietal, and frontal eye
fields (Kandel et al., 2013).
Cell specialization in the brain may extend to the
retina. Three different types of ganglion cells have
been identified in the cat: X, Y and W cells (Levine
& Shefner 1991). Y cells are largest and most often
encountered by electrodes, but they make up only 4%.
Like the complex cells, Y cells are nonlinear and give
a transient response to stimuli. The linear X cells
make up 55%. Both X and Y cells project to the
thalamus.
The W cells make up the remaining 41% but do
not go to the cortex of the brain. Instead, they go to
the brain stem and are thought to not be part of
conscious vision. Their role seems to be detecting the
most salient features of the image and directing
unconscious eye movements to concentrate on these
features.
2.7 Expected Input
The cells of V1 receive input from the eye. However,
they have more inputs from higher centres of the
brain, whose function appears to be making an
expected image more likely (Kandel et al. 2013).
Psychologists distinguish the sensation that is input to
the senses from the perception of what the data
represents. There appears to be a strong feedback
mechanism in which an expected model of the
phenomenon helps drive what is perceived.
2.8 Non-uniform Representation
The retinotopic organization is extremely dense at the
fovea, and less so on the periphery. The distribution
can be modelled as log-polar (Zhang, 2006). The eye
makes constant non-voluntary micro-motions
(saccades) to examine relevant areas. Spatial filtering
ensures that the visual system does not respond to
noise (Wilson et al. 1990).
2.9 Colour
Most of an image’s information is in the grey scale;
colour makes a minor contribution. Human cones are
sensitive to three wavelengths, peaking at 558
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
518

(yellow-green), 531 (green) and 420 nm (blue). Only
5% of the cones are sensitive to blue and the eye is
much less sensitive to an equiluminance image that
differs only in chrominance.
JPEG and MPEG image compression is largely
directed to the luminance content of the image, with
reduced emphasis on the chrominance (Rabbani
2002). Images are commonly stored in a compressed
format, but then put into a full RGB format with
redundant data before processing.
As demonstrated by Land’s famous experiment,
colour is a psychological construct, not a physical one
(Land 1985). The same wavelength of light can be
perceived as different colours.
Other species have different wavelength
sensitivity. Birds may have four different cone types.
Warm blooded animals cannot make effective use of
the infrared spectrum, but this limitation does not
apply to cold blooded animals. Ultraviolet light tends
to damage the eye and is avoided by animals. Some
insect eyes are sensitive to light polarization.
Biological restrictions do not apply to silicon
photoreceptors which tend to be sensitive to infrared.
Considerable ingenuity has been applied to circuits to
make them mimic human vision. Machine vision has
superhuman capabilities which can be exploited.
Multispectral imaging is common in satellite land
observation systems.
2.10 Early Learning
There is not enough information in the DNA to fully
specify brain connections. Animals wire their brains
in utero or in early life. Kittens raised in a visually
deprived environment never develop normal vision.
Humans take five years to reach full visual acuity
(Van Sluyters et al. 1990). However, once the
fundamental connections for the eye and primary
visual cortex has been learned, there does not appear
to be further plasticity.
2.11 Selective Cells
At higher layers of cortex in macaque monkey there
are single cells that respond strongly to a particular
feature, such as a face or hand, at any position.
(Goldstein and Brockmole, 2014). Such cells may
respond to only to faces or to hands. Some seem to
encode facial parts such as eyes or mouth. Some cells
are specific for responding to the face of an individual
monkey or human.
2
The digitized filter would be 7x7 less three pixels at each
corner or 37 pixels.
2.12 Shallow Computation
Cell processing speeds are on the order of a
millisecond in neurons, but a nanosecond in silicon.
Despite a million to one speed disadvantage, human
vision is superior to machine vision. This
performance is achieved through massive parallelism.
A human can perceive a visual stimulus and react to
it in less than a second. This implies that the
computational process is done in under 1000 steps.
3 PROPOSED METHOD
It is proposed that deep learning start with a fixed
convolution that mimics the signal transformations
performed by the retina and simple cells of primary
visual cortex. This reduces the dimensionality of the
image by an order of magnitude without sacrificing
relevant detail. It removes the computational burden
of needing to find weights for the initial layers. The
initial image transformation would be handled by an
overlapping hexagonal grid of receptive fields. The
size of the receptive fields can be either fixed or set
dynamically. Recommended minimum size is seven
pixels in diameter; maximum about 20 to 30.
Dynamic resizing of receptive field size is possible,
mimicking the attention to areas of high curvature
achieved by saccades. This processing is done on
monochrome images, with lower resolution
chrominance components handled by a different path.
3.1 Quadrature Disambiguation
The system hypothesizes that at the scale of interest,
the contents of a receptive field represent a straight
line at an unknown position and orientation with
uniform contrast on either side. Note that the
receptive fields are circular; not square. A receptive
field of diameter 7 covers 38 pixels (π∙3.5
2
);
2
a
diameter of 20 covers 340 pixels. After convolution,
either of these fields can be reduced to five numbers.
This is compression 7:1 to 68:1 for a monochrome
image, though with overlap image compression
would be about half that. A colour image would be
represented by the five monochrome filters plus two
more for colour. Without accounting for overlap,
colour image compression ranges from 16:1 to 145:1.
An algorithm called Quadrature Disambiguation
has been developed that can process these five
numbers to detect the exact orientation of the edge,
Convolutional Neural Networks with Fixed Weights
519

though the equation needs to be solved numerically
(Folsom and Pinter, 1998). Knowing the orientation,
the convolutional outputs can be steered to predict the
results of convolving with a quadrature pair of filters
exactly aligned to the image orientation. From their
phase, the edge position can be determined to sub-
pixel resolution. Edge contrast can be computed. If
the contrast is low, the receptive field is judged to
have no feature.
Having detected an edge at a particular position
and orientation, the system can compute what the
filter outputs would have been had the hypothesis
been true that the receptive field contained only an
ideal edge. The difference of the ideal filters from the
actual ones can be processed by the same algorithm
to find a secondary edge. If the residual edge has low
contrast, the receptive field feature is classified as an
edge. Otherwise, it is a corner or point of inflection.
The intersection of the two edges gives the corner
location and angle.
Steerability means that under certain
circumstances, the response of an oriented filter can
be interpolated from a small number of filters
(Adelman and Adelson, 1991). The five convolution
filters used above consist of a pair of orthogonal even
functions and three orientations of odd functions.
These have a similar appearance to filters often found
in convolutional neural networks, but have the
desirable properties of compact support, smoothness
and steerability.
Researchers have detected simple cell neurons in
V1 that are responsive to oriented edges; other cells
respond to bars. These have been called edge
detectors and bar detectors. It may be that the “bar
detectors” are the conjugate phase of an edge
detector. By looking at the phase difference of a
properly oriented edge detector and its conjugate, one
can determine the position of the edge within the
receptive field.
Figure 2 gives an example for a coarse tiling of an
image. It uses slightly overlapped receptive fields of
diameter 20 pixels, arranged in a 12 by 21 hexagonal
grid. Five filters at the 252 locations of the grey-scale
image means that the 83,349-pixel image has been
reduced to 1260 numbers. These numbers are then
processed to find the locations and orientations of
edges. The more prominent edges are visualized by
red and blue segments in Figure 3. It should be noted
that edge detection in image processing produces a
binary image of edge locations which requires further
processing to fit lines. By contrast, the output from
Quadrature Disambiguation is a list of edge locations,
orientations and contrast. The information could be
further processed to draw a cubic spline outlining
features. Lateral inhibition and excitation can be used
to dynamically change the contrast threshold for edge
recognition, filling in phantom lines. Grouping
edgelets together to form polylines has been done for
stereo depth perception (Folsom 2007).
Figure 2: Green circles give an image tiling.
This example is a coarse tiling leading to coarse
edge detection. Finer results can be obtained by
decreasing the diameter of the receptive fields and
increasing their overlap. Using a diameter of 12 pixels
would give a 37 by 22 grid for a total of 874 locations.
A diameter of 8 would give 1972 locations.
Figure 3: Visualization of detected edges.
It has been shown algorithmically that it is
possible to extract the key information in an image
after systematic convolution by filters with fixed
weights. Pixels are not required. This paper is not
advocating using the Quadrature Disambiguation
algorithm. Instead, it is pointing out that since the
information is contained in the convolved image, it is
discoverable by deep learning.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
520
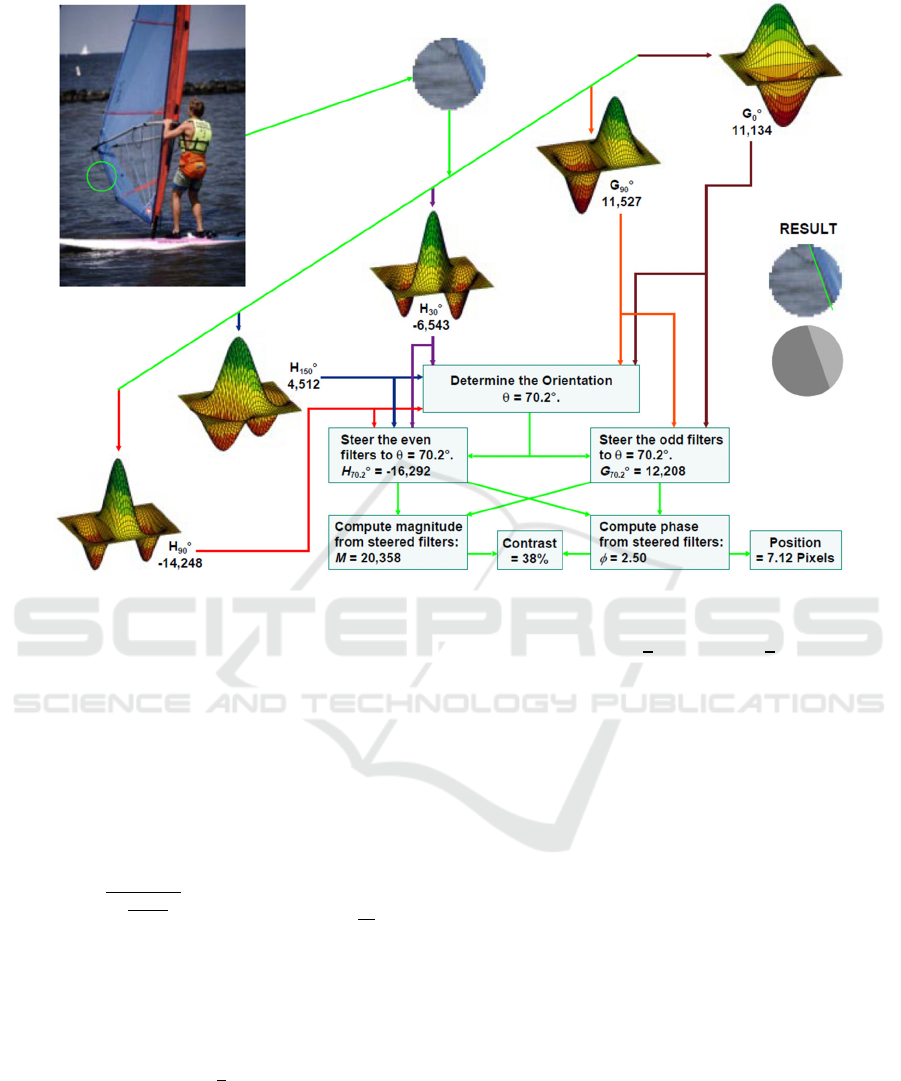
Figure 4: Filters for image simplification (Folsom and Pinter 1998).
3.2 Filters
Figure 4 illustrates how five filters can be used to find
the orientation, position and contrast of the dominant
edge in a receptive field. These filters are windowed
by a circularly symmetric function that resembles a
Gaussian but has compact support and is infinitely
differentiable. For a filter of diameter d, centred at c,
the window is given by rotating
𝑤
𝑥
⎩
⎨
⎧
1𝑓𝑜𝑟 𝑥𝑐
𝑒
𝑓𝑜𝑟 𝑐
|
𝑥
|
𝑐
0𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒
(1)
Outside the radius of d/2, w(x) does not exceed
0.0082, and it is zero outside a radius of 5d/8.
The even filters are set to
𝐺
𝑥
𝑤𝑥12
𝑥𝑐
(2)
The parameter α is set to 5.665 so that the filter
gives zero response to a blank receptive field. The
two even filters are rotated to be orthogonal to each
other, resulting in the two filters G
0°
and G
90°
.
Odd filters are given by
𝐻
𝑥
𝑤𝑥𝛾
𝑥𝑐
𝛽
𝑥 𝑐
(3)
Maximum phase linearity is achieved by setting
γ=2.205 and β=0.295. The three odd filters are rotated
to form H
30°
, H
90°
and H
150°
. For a colour RGB image,
these five filters would be applied to monochrome
pixels formed by (R+G+B)/3. These five numbers
would be supplemented by a red chrominance filter
C
R
produced by applying w(x) to pixels formed from
(R-G)/2 and a blue filter C
B
from convolving pixels
(2B-R-G)/4 with w(x).
In order to produce the fixed weights to be used
on the first stage of the convolutional neural network,
perform the following tasks:
Select a pixel diameter.
Arrange the receptive fields in a grid that tiles the
image.
For the given diameter, compute the filter
coefficients G
0°
and G
90°
from equations (1) and
(2).
Compute the filter coefficients H
30°
, H
90°
and
H
150°
from equations (1) and (3).
Compute C
R
and C
B
from equation (1).
Apply the filters to the grey-scale or coloured
pixels as appropriate.
Convolutional Neural Networks with Fixed Weights
521

All subsequent layers of the CNN will learn
weights from these numbers and will have no
access to the original image.
A variant would be to select two or more scales
for diameters.
In summary, a circular region of an image is
reduced to the seven numbers G
0°
, G
90°
, H
30°
, H
90°
,
H
150°
, C
R
and C
B
. An overlapping circular grid
processed to extract these numbers contains the key
information that deep learning needs for image
understanding. On a colour image with diameter d set
to 9, and with 50% overlap, image compression is
13:1. For a less detailed analysis, setting d to 30 gives
compression of 150:1.
Code to implement these filters is on
https://github.com/elcano/QDED in file Features.c.
3.3 Deep Learning
The following architecture is proposed:
The input image undergoes a fixed
convolution. Each receptive field is reduced to
five numbers, plus two additional numbers for
red-green and blue-yellow colour contrast. This
layer corresponds to V1 simple cells (V1S).
The neural network has no access to the image
feeding V1S.
Network layers connected to the V1S input
layer should be convolutional and grouped
modularly. They may be organized into
separate paths to recognize form, motion and
colour.
V1S may feed to V1C, which corresponds to
the ability of the complex cells to find features
over a wider range (Chen et al. 2013).
Modules should be connected in a fashion that
allows lateral excitation or inhibition of a
feature based on its presence in neighbouring
cells (Jerath et al., 2016).
There should be feedback from the final
classification outputs back to V1S to bias
perception in favour of the expected result.
A shallow learning network should implement
an alphabet for visual recognition. This might
include generic faces, hands, letters or
geometric shapes. The trained network should
be included as a building block for most
models.
4 RESULTS
This is not a research paper; rather it is a position
paper arguing that CNN would benefit from an image
pre-processing step that reduces the dimensionality of
images without discarding useful information. The
technique has not been implemented in deep learning
systems. Animals have used these techniques for
millennia. Even tiny-brained creatures have
developed visual systems superior to most machine
vision systems.
5 CONCLUSIONS
Pixels are not the fundamental visual element. Fixing
the weights for the first network layer reduces its size.
Since the initial convolution has been shown to
include key image features, image sizes can be
compressed by an order of magnitude without
information loss. The reduced image size leads to
faster deep learning. Filtering produces a more stable
system with better noise immunity. It protects the
network from learning weird filters for its first stage.
It may be the solution to the problem of networks that
produce wildly different classifications for images
that look identical to humans.
REFERENCES
Daugman, J, 1990. Brain Metaphor and Brain Theory in
Computation Neuroscience. Schwartz, E. L. Editor,
MIT Press.
McCulloch, W. S., Pitts, W, 1943. “A Logical Calculus of
the Ideas Immanent in Nervous Activity”, Bulletin of
Mathematical Biophysics, pp. 115-133.
von Neumann, J. 1945, "First draft of a report on the
EDVAC," reprinted 1993 in IEEE Annals of the History
of Computing, vol. 15, no. 4, pp. 27-75.
von Neumann, J. 1958. The Computer and the Brain. Yale
University Press.
Rosenblatt, F., 1958. “The Perceptron: A Probabilistic
Model for information and Storage in the Brain”,
Psychological Review, pp. 386-408.
Minsky, M., Papert, S., 1969. Perceptrons, MIT Press.
Bryson, A. E., Ho, Y-C, 1975. Applied Optimal Control.
Taylor & Francis.
Hopfield, J. J. 1982. Neural Networks and Physical Systems
with Emergent Collective Computational Abilities.
Proceedings of the National Academy of Sciences pp
2554-2558
Hinton, G.E., 1987. Connectionist Learning Procedures.
Carnegie-Mellon University Technical Report CMU-
CS-87-115.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
522

Rumelhart, R. D., McClelland, J. L. 1986. Parallel
Distributed Processing, MIT Press.
Marr, D. 1982. Vision, W. H. Freeman & Co.
Badrinarayanan, V., Kendall, A., Cipolla, R., 2016. SegNet:
A Deep Convolutional Encoder-Decoder Architecture
for Image Segmentation.
https://arxiv.org/abs/1511.00561
Rasouli, A. 2020. Deep Learning for Vision-based
Prediction: A Survey. https://arxiv.org/abs/2007.00095
Elgendy, M. 2020. Deep Learning for Vision Systems.
Manning.
Szegedy, C. et al. 2014. Intriguing Properties of Neural
Networks. https://arxiv.org/abs/1312.6199
Nguyen, A., Yosinski , J., Clune J. 2015. Deep neural
networks are easily fooled: High confidence predictions
for unrecognizable images, IEEE Conference on
Computer Vision and Pattern Recognition (CVPR),
Boston, MA, pp. 427-436.
Hubel, D. H., Wiesel, T. N., 1977. Ferrier Lecture:
Functional Architecture of the Macaque Monkey
Visual Cortex. Proceedings of the Royal Society of
London, Series B, Vol 198, pp 1-59.
Kandel, E. R., et al. 2013. Principles of Neural Science,
McGraw-Hill, 5th edition.
Levine, M. W., Shefner, J. M. 1991. Fundamentals of
Sensation and Perception. Brooks/Cole.
Antolik, J. Bednar, J. 2011. Development of Maps of
Simple and Complex Cells in the Primary Visual
Cortex, Frontiers in Computational Neuroscience, Vol
5.
Touryan, J., Lau, B., Dan, Y., 2002. Isolation of Relevant
Visual Features from Random Stimuli for Cortical
Complex Cells. Journal of Neuroscience, 22 (24) pp.
10811-10818.
Miikkulainen, R., Bednar, J. A., Choe, Y., Sirosh, J., 2005.
Computational Maps in the Visual Cortex, Springer.
Gattass, R. et al., 2005 Cortical visual areas in monkeys:
location, topography, connections, columns, plasticity
and cortical dynamics. Philosophical. Transactions of
the Royal Society. B360709–731.
Nabet, R., Pinter, R. B. 1991. Sensory Neural Networks:
Lateral Inhibition, CRC Press.
Lamb, T. D. 2016. Why Rods and Cones? Eye 30 pp. 179-
195.
Levine, M. D., 1985. Vision in Man and Machine,
McGraw-Hill.
Zhang, A. X. J., Tay, A. L. P., Saxena, A. 2006. Vergence
Control of 2 DOF Pan-Tilt Binocular Cameras using a
Log-Polar Representation of the Visual Cortex. IEEE
International Joint Conference on Neural Network
Proceedings, Vancouver, BC, 2006, pp. 4277-4283.
Rabbani, M. 2002. JPEG2000 Image Compression
Fundamentals, Standards and Practice. Journal of
Electronic Imaging 11(2).
Wilson, H. R. et al. 1990. The Perception of Form: Retina
to Striate Cortex in Spillman, L. and Werner, J. S. (eds)
Visual Perception: The Neurophysiological
Foundations, Academic Press.
Land, E. H., 1985. Recent Advances is Retinex Theory in
Ottoson D., Zeki S. (eds) Central and Peripheral
Mechanisms of Colour Vision. Wenner-Gren Center
International Symposium Series. Palgrave Macmillan.
Van Sluyters, R. C., et al, 1990. The Development of Vision
and Visual Perception, in Visual Perception: The
Neurophysiological Foundations, Spillman, L. and
Werner, J. S., editors, Academic Press.
Goldstein, E. A., Brockmole, J. R. 2014. Sensation and
Perception, Cengage Learning, 10
th
Edition.
Folsom, T. C., Pinter, R. B., 1998. Primitive Features by
Steering, Quadrature, and Scale. IEEE Transactions on
Pattern Analysis and Machine Intelligence, pp. 1161-
1173.
Adelman, W. T., Adelson, E. H., 1991 The Design and Use
of Steerable Filters. IEEE Transactions on Pattern
Analysis and Machine Intelligence, Vol 13; pp 891-906.
Folsom, T. C., 2007 Non-pixel Robot Stereo, IEEE
Symposium on Computational Intelligence in Image
and Signal Processing, April 2, Honolulu, HI, pp 7 -12.
Chen, D., Yuan, Z, Zhang, G., Zheng, N., 2013.
Constructing Adaptive Complex Cells for Robust
Visual Tracking. Proceedings of the IEEE International
Conference on Computer Vision, pp. 1113-1120.
Jerath, R., Cearley, S. M., Barnes, V. A., Nixon-Shapiro, E.
2016. How Lateral Inhibition and Fast Retinogeniculo-
Cortical Oscillations Create Vision: A New Hypothesis.
Medical Hypotheses, Vol. 96, pp 20-29
Convolutional Neural Networks with Fixed Weights
523
