
Upsampling Attention Network for Single Image Super-resolution
Zhijie Zheng
1,2,3 a
, Yuhang Jiao
4 b
and Guangyou Fang
1,2,3 c
1
Aerospace Information Research Institute, Chinese Academy of Sciences, Beijing, China
2
Key Laboratory of Electromagnetic Radiation and Sensing Technology, Chinese Academy of Sciences, Beijing, China
3
University of Chinese Academy of Sciences, Beijing, China
4
The University of Tokyo, Tokyo, Japan
Keywords:
Single Image Super-resolution, Convolutional Neural Network, Attention Mechanism.
Abstract:
Recently, convolutional neural network (CNN) has been widely used in single image super-resolution (SISR)
and made significant advances. However, most of the existing CNN-based SISR models ignore fully utilization
of the extracted features during upsampling, causing information bottlenecks, hence hindering the expressive
ability of networks. To resolve these problems, we propose an upsampling attention network (UAN) for richer
feature extraction and reconstruction. Specifically, we present a residual attention groups (RAGs) based struc-
ture to extract structural and frequency information, which is composed of several residual feature attention
blocks (RFABs) with a non-local skip connection. Each RFAB adaptively rescales spatial- and channel-wise
features by paying attention to correlations among them. Furthermore, we propose an upsampling attention
block (UAB), which not only applies parallel upsampling processes to obtain richer feature representations,
but also combines them to obtain better reconstruction results. Experiments on standard benchmarks show the
advantage of our UAN over state-of-the-art methods both in objective metrics and visual qualities.
1 INTRODUCTION
Single image super-resolution (SISR) (Freeman et al.,
2000) is a classical task in computer vision that aims
at reconstructing an accurate high-resolution (HR)
image from its low-resolution (LR) image. However,
SISR is an ill-posed problem since there are many HR
solutions exist for each LR input. Therefore, numer-
ous methods have been proposed to deal with this in-
verse problem.
Deep convolutional neural network (CNN) based
methods have obtained significant improvements over
conventional SISR methods recently. Due to the pow-
erful feature representation ability, CNN-based SISR
methods can learn the mapping function from LR
image to its corresponding HR image, and achieved
state-of-the-art performances. SRCNN (Dong et al.,
2014) was first proposed as a three layers CNN for
SISR. VDSR (Kim et al., 2016) was then proposed
to learn the residual of the interpolation image and
HR image. LapSRN(Lai et al., 2017) was further pro-
posed as a multi-phase method to learn intermediate
a
https://orcid.org/0000-0001-8849-4997
b
https://orcid.org/0000-0003-0629-3345
c
https://orcid.org/0000-0003-2052-4808
residual features. FSRCNN (Dong et al., 2016) re-
placed the predefined interpolation with a learnable
upsampling method. Inspired by ResNet(He et al.,
2016), EDSR(Lim et al., 2017) introduced a very
deep network by using residual connections. DBPN
(Muhammad et al., 2018) was designed by using it-
erative up and downsampling to gain richer features.
Channel attention was introduced in RCAN (Zhang
et al., 2018) to enhance the extracted features and
SAN (Dai et al., 2019) used second-order attention
to further improve accuracy.
However, existing CNN-based methods still have
several limitations: (1) most of CNN-based SISR
methods equally treat extracted features, hindering
the representation of models. (2) most existing CNN-
based SISR methods use extracted low-resolution in-
formation by a single upsampling process, which
loses the flexibility to process different information
and causes information bottlenecks. Learnable up-
sampling has proven to be better than interpolation
upsampling (Shi et al., 2016), but using single up-
sampling still limits the possibility of image recon-
struction.
To resolve these problems, we propose an upsam-
pling attention network (UAN) to obtain richer feature
representation and make better use of features for the
Zheng, Z., Jiao, Y. and Fang, G.
Upsampling Attention Network for Single Image Super-resolution.
DOI: 10.5220/0010283603990406
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 4: VISAPP, pages
399-406
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
399
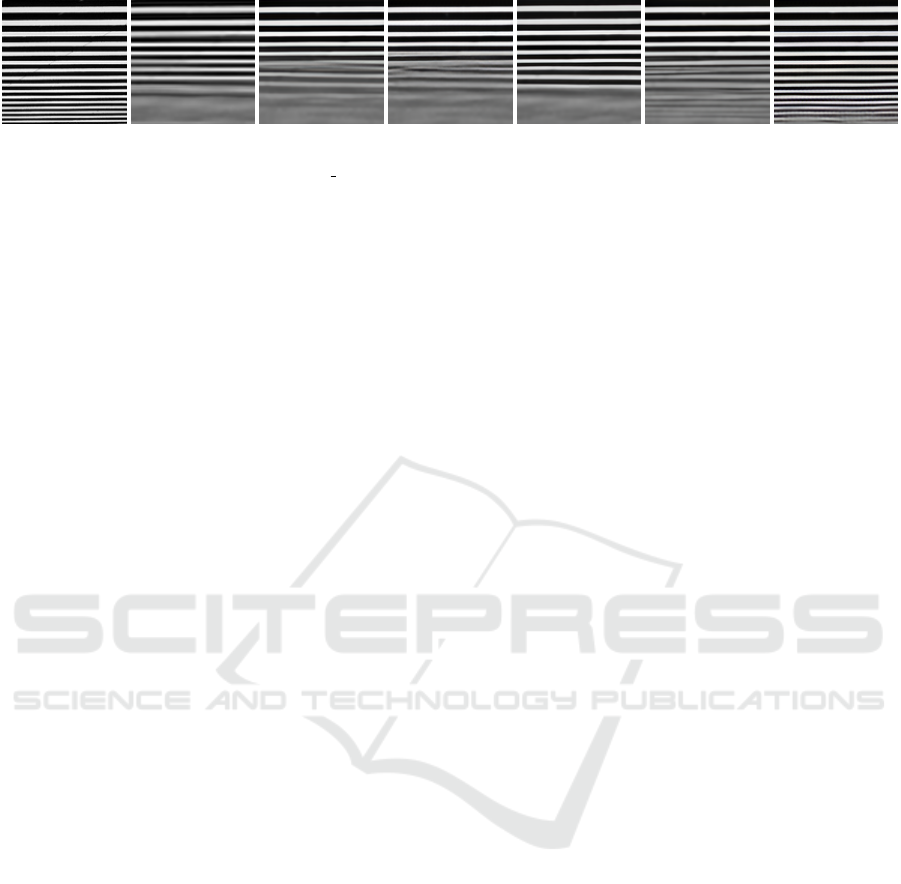
(a) HR (b) SRCNN (c) EDSR (d) DBPN (e) RCAN (f) SAN (g) Ours
Figure 1: Visual results for 4× SISR on “img 011” from Urban100 benchmark. Our method obtains more details and higher
visual quality than other state-of-the-art methods.
upsampling process. Specifically, we pay more atten-
tion to useful feature information using a set of resid-
ual attention groups (RAGs). RAG preserves abun-
dant information and further enhances information
through a non-local skip connection. In each RAG,
the residual feature attention block (RFAB) serves
as the basic part and a local skip connection passes
residual features at a fine level. Moreover, an upsam-
pling attention block (UAB) combines different up-
sampling features as an ensemble method, and recon-
structs the final high-resolution image through convo-
lutional layers. Compared with other state-of-the-art
methods as shown in Figure 1, our method recovers
more details and obtains higher visual quality.
In summary, our contributions are three-fold:
• We propose an upsampling attention network
(UAN) for SISR tasks. We show the superiority
of our UAN over state-of-the-art methods both in
objective and subjective qualities by experiments
on public benchmarks;
• We propose a residual attention group (RAG)
structure to extract deep and rich features. We
use non-local and local skip connections in RAG
to help the main network learn abundant informa-
tion;
• We propose an upsampling attention block (UAB)
to adaptively choose better upsampling features
by paying attention to extracted channels. Such
mechanism further enhances the representational
ability of our network.
We organize our paper as follows. Related work
on SISR using convolutional networks and attention
mechanism is reviewed in Section 2. UAN architec-
ture is described in Section 3. Experimental settings,
ablations and results are discussed in Section 4. We
summarize the paper in Section 5.
2 RELATED WORK
A lot of SISR models have been proposed recently
in the computer vision field. Attention mechanism is
popular in high-level vision tasks. In this section, we
focus on works related to CNN-based SISR models
and attention mechanism.
2.1 CNN-based SISR Models
Recently, CNN-based models, which have strong
nonlinear representational power, have been widely
studied in SISR. These models can be primarily di-
vided into two types based on upsampling methods as
follows.
Interpolation-based upsampling uses interpola-
tion (e.g., Bicubic) as the upsampling operator to in-
crease the spatial resolution, then uses convolutional
layers to add details. SRCNN (Dong et al., 2014)
was first introduced to SISR, which achieved supe-
rior performance than previous works. By introduc-
ing residual learning to train deeper layers, VDSR
(Kim et al., 2016) achieved better performance. Lap-
SRN(Lai et al., 2017) was further proposed as a multi-
stage residual learning method to learn intermediate
features. These interpolation-based methods can eas-
ily keep low-frequency information such as region
colors, but lose high-frequency information such as
edges and produce new noise.
Learning-based upsampling uses learnable up-
sampling methods (e.g., deconvolution) to increase
the spatial resolution. This approach was firstly pro-
posed by FSRCNN (Dong et al., 2016) to acceler-
ate SRCNN. An enhanced deep network EDSR (Lim
et al., 2017) was proposed by introducing residual
blocks. Later, DBPN (Muhammad et al., 2018) used
iterative up and downsampling to gain richer features.
To further improve the performance, RCAN (Zhang
et al., 2018) considered feature correlations in channel
dimension. These learning-based methods simultane-
ously reconstruct low- and high-frequency informa-
tion, usually need bigger model capacity and longer
training times.
However, these methods only perform a single up-
sampling process of LR images. Since upsampling is
a key step to reconstruct HR images from LR images,
improper upsampling will cause information bottle-
necks. We introduce an upsampling attention method
that focuses on more important upsampling feature
channels to generate integrated HR images.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
400

Local skip connection
Non-local skip connection
RAG(1)
RFAB(1)
Residual
attention group
g
F
g
F
RAG(g) RAG(G)
RFAB(b) RFAB(B)
Residual Attention Group
Upsampling
attention block
Residual feature
attention block
Conv
Element-
wise sum
1g
F
LR
I
1g
F
DF
F
UF
F
SR
I
SF
F
Figure 2: Network architecture of our upsampling attention network (UAN). It consists of four parts: a shallow feature
extraction part, a residual attention group (RAG) based deep feature extraction part, an upsampling attention block (UAB),
and a reconstruction part.
2.2 Attention Mechanism
Recently, attention mechanism has been proved use-
ful in high-level vision tasks such as image classifi-
cation. Squeeze-and-excitation network (SENet) (Hu
et al., 2018) was proposed to build channel-wise at-
tention to gain significant performance improvement
for image classification. Beyond channel, CBAM
(Woo et al., 2018) introduced spatial attention in a
similar way.
In recent years, attention mechanism was intro-
duced to SISR to improve accuracy (Zhang et al.,
2018)(Dai et al., 2019), but they only focused on
channel attention. For the extracted feature, different
channels carry different frequency information, and
different spatial pixels carry different position infor-
mation. As a low-level vision task, SISR not only
requires the recovery of low- and high-frequency in-
formation, but also requires accurate position infor-
mation. If our model pays attention to more informa-
tive information, it should be promising to get better
performance. To introduce such mechanism in deep
CNNs, we propose an upsampling attention network,
which will be detailed in the next section.
3 UPSAMPLING ATTENTION
NETWORK (UAN)
In this section, we introduce an upsampling attention
network (UAN), a new model architecture for SISR
tasks, and explain the details of the whole network.
3.1 Model Architecture
As shown in Figure 2, the UAN can be divided into
four parts: a shallow feature extraction part, a residual
attention group (RAG) based deep feature extraction
part, an upsampling attention block (UAB) module,
and a reconstruction part. Let the I
LR
and I
SR
as the
input and output of UAN. Following (Zhang et al.,
2018)(Dai et al., 2019), we use a single convolutional
layer to extract the shallow feature F
SF
from the LR
input:
F
SF
= H
SF
(I
LR
), (1)
where H
SF
(·) denotes the convolution operation to ex-
tract the shallow feature. Then F
SF
is passed to RAG
based feature extraction, which extracts the deep fea-
ture as F
DF
:
F
DF
= H
RAG
(F
SF
), (2)
where H
RAG
(·) represents our proposed RAG based
deep feature extraction part, which consists of G
RAGs to extract the deep feature and a non-local skip
connection to enhance the feature. Each RAG con-
sists of B residual feature attention blocks (RFABs).
Then the deep feature F
DF
is upsampled via a UAB
module:
F
UF
= H
UAB
(F
DF
), (3)
where H
UAB
(·) and F
UF
represent our UAB part
and upsampled feature respectively. There’re sev-
eral methods to be chosen as the upsampling method,
such as deconvolution and ESPCN (Shi et al., 2016).
However, these methods only use a single upsam-
pling process, which hinders the delivery of rich fea-
tures. Our UAB module adaptively adjusts concerned
features based on attention of upsampling informa-
tion. Without much computational burden, it achieves
higher performance than previous SISR methods.
The upsampled feature is then reconstructed to high-
resolution image through a single convolutional layer:
I
SR
= H
R
(F
UF
) = H
UAN
(I
LR
), (4)
where H
R
(·) and H
UAN
(·) respectively denote the re-
construction convolutional layer and our UAN.
Upsampling Attention Network for Single Image Super-resolution
401

Then a certain loss function will be optimized for
the model. Several loss functions have been used,
such as L
2
loss and L
1
loss. We choose the same loss
function as previous works (e.g., L
1
loss). Given a
training set contains N LR images and related HR im-
ages represents as {I
i
LR
, I
i
HR
}
N
i=1
. The goal of training
UAN is to optimize the L
1
loss function:
L(Θ) =
1
N
N
∑
i=1
||H
UAN
(I
i
LR
) − I
i
HR
||
1
, (5)
where Θ denotes the parameter set of our UAN. The
loss function is minimized by gradient descent algo-
rithm. In the following subsections, we pay attention
to our proposed RAG, RFAB and UAB modules.
3.2 Residual Attention Group (RAG)
We now show more details of our proposed RAG
(see Figure 2), which consists of several RFAB mod-
ules and a local skip connection. The RFAB exploits
the abundant feature information which will be intro-
duced in Section 3.3. The local skip connection helps
to keep more structure cues. Such residual structure
allows extracting deep and rich features with more de-
tails.
It has been proven that stacked residual blocks are
useful to construct deep CNNs in (He et al., 2016).
However, building a very deep network in such way
for SISR would cause training difficulty and intro-
duce gradient exploding and vanishing to hinder per-
formance improvement. Inspired by works in (Zhang
et al., 2018), we proposed RAG as the fundamental
block for our network. A RAG in the g-th group is
represented as:
F
g
= H
g
(F
g−1
), (6)
where H
g
(·) represents the function of the g-th RAG.
F
g−1
and F
g
denote the input and output of the g-
th RAG. It is known that naively stacking repeated
blocks would fail to gain better performance. To this
end, we use a non-local skip connection to keep abun-
dant information and facilitate training. The deep fea-
ture then can be obtained as:
F
DF
= W
NSC
F
SF
+ F
G
, (7)
where W
NSC
denotes the weight to the non-local skip
connection. It can not only help to learn residual in-
formation from shallow features, but also stabilize the
training of deep networks.
As a low-level visual task, there are abundant in-
formation in the LR images and the goal of SISR task
is to reconstruct more useful information. Due to the
non-local skip connection, the rich low-frequency in-
formation can be passed. To get better use of resid-
ual information, we stack B residual feature attention
blocks (RFABs) in each RAG. The b-th RFAB in the
g-th RAG can be represented as:
F
g,b
= H
g,b
(F
g,b−1
), (8)
where H
g,b
(·) is the function of the b-th RFAB in the
g-th RAG. F
g,b−1
and F
g,b
denote the corresponding
input and output. A local skip connection is intro-
duced to gain the block output to extract more infor-
mative features via:
F
g
= W
LSC
F
g−1
+ F
g,B
, (9)
where W
LSC
denotes the weight to the local skip con-
nection. It keeps more abundant residual information.
To extract more discriminative representations, we in-
troduce our RFAB by channel- and spatial-wise fea-
ture rescaling with attention mechanism.
3.3 Residual Feature Attention Block
(RFAB)
Most previous CNN-based SISR models treat features
equally. To extract more informative features, channel
attention (Zhang et al., 2018)(Dai et al., 2019) was
introduced to better use the channel-wise features for
SISR. However, they ignored exploiting spatial-wise
information, thus hindering the discriminative ability
of the network.
Inspired by the above observations, we propose a
residual feature attention block (RFAB) module (see
Figure 3). For the b-th RFAB in the g-th RAG, we
get:
F
g,b
= F
g,b−1
+ S
g,b
(C
g,b
(F
0
g,b−1
)), (10)
where C
g,b
(·) and S
g,b
(·) denote the function of chan-
nel attention and spatial attention respectively. F
g,b−1
and F
g,b
denote the input and output of RFAB. The
middle feature F
0
g,b−1
is gained by two stacked convo-
lutional layers:
F
0
g,b−1
= W
2
g,b
δ(W
1
g,b
F
g,b−1
), (11)
where W
1
g,b
and W
2
g,b
denote the weights of convo-
lutional layers, and δ(·) denotes the Mish activation
function. Then we will introduce how to exploit chan-
nel and spatial information next.
Channel Attention. As shown in Figure 3, given the
input feature map F
0
g,b−1
= [ f
1
, · · ·, f
C
] which has C
channel numbers with size of H ×W. We use global
average pooling as the channel descriptor for sim-
plicity. It shrinks F
0
g,b−1
through spatial dimensions
H ×W to produce the channel-wise statistic Z
C
∈ R
C
,
the c-th scalar of Z
C
can be computed as:
z
c
= H
AP
( f
c
) =
1
H ×W
H
∑
i=1
W
∑
j=1
f
c
(i, j), (12)
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
402

Channel
Attention
Spatial
Attention
Conv Mish
Sigmoid
function
Element-
wise
product
Element-
wise
sum
Channel Attention
Spatial Attention
11
C
r
HWC
HWC
11C
11C
1HW
1HW
,1
g
b
F
'
,
g
b
F
''
,
g
b
F
C
M
S
M
,
g
b
F
A
P
H
AP
H
CD
W
CU
W
C
Z
S
Z
S
W
'
,
g
b
F
''
,
g
b
F
Figure 3: A RFAB receives a feature map F
g,b−1
of the size
H × W × C as an input and outputs a feature map F
g,b
of
the same size. Channel attention and spatial attention are
introduced to make better use of abundant feature informa-
tion. Residual connections help to build a deep and efficient
network.
where H
AP
(·) and f
c
(i, j) denote the average pooling
function and the value of c-th feature f
c
at position
(i, j) respectively.
Then a gating mechanism is introduced to exploit
channel interdependencies from the aggregated infor-
mation. Following (Hu et al., 2018), we use a simple
sigmoid function as the gating function:
M
C
= σ(W
CU
f (W
CD
Z
C
)), (13)
where σ(·) and f (·) denote the sigmoid and ReLU
function. W
CD
is the weight of channel-downscaling
convolutional layer with reduction ratio r. W
CU
is the
weight of channel-upscaling convolutional layer with
ratio r. Then we rescale the input with the channel
attention map M
C
:
F
00
g,b−1
= M
C
· F
0
g,b−1
(14)
Spatial Attention. The process of spatial attention is
similar to channel attention. Since we’ve obtained the
channel reweighted feature F
00
g,b−1
= [ f
0
1
, · · ·, f
0
C
], we
use channel average pooling as the spatial descriptor.
The spatial-wise statistic Z
S
∈ R
H×W
can be gained
by shrinking channel dimension C. Then the (i, j) el-
ement of Z
S
is computed by:
z
s
(i, j) = H
AP
(F
00
g,b−1
(i, j)) =
1
C
C
∑
c=1
f
0
c
(i, j), (15)
where H
AP
(·) and f
0
c
(i, j) denote the average pooling
function and the value of c-th feature f
0
c
at position
(i, j) respectively. Then we use the same gating mech-
anism as channel attention:
M
S
= σ(W
S
Z
S
), (16)
where σ(·) and W
S
denote the sigmoid function and
the weight of a convolutional layer. Then we reweight
the spatial dimension using map M
S
and obtain the
final output as discussed before:
F
g,b
= F
g,b−1
+ M
C
· F
00
g,b−1
(17)
Softmax
function
Element-
wise
product
Element-
wise
sum
Upsampling
operator
HWC
''
HWC
''
HWC
11C
11C
11C
11
C
r
''
HWC
''
HWC
A
P
H
D
W
DF
F
'
U
F
''
U
F
U
F
Z
'
U
M
''
U
M
UF
F
U
W
Figure 4: A UAB receives a low-resolution feature map of
the size H ×W ×C as an input and outputs a high-resolution
feature map of the size H
0
×W
0
×C. We use parallel upsam-
pling processes to obtain integrated reconstruction results.
We only show a two-branch case, but it is easy to extend to
multiple branches case.
3.4 Upsampling Attention Block (UAB)
To gain better reconstruction results, we propose an
upsampling attention block (UAB) among multiple
upsampling processes. Specifically, we produce sev-
eral high-resolution features from the deep extracted
feature, fuse them and output the ensembled feature
using attention mechanism. Figure 4 shows a two-
branch case. Therefore in this case, there are only
two upsampling branches, but it’s easy to extend to
multiple branches cases.
For the extracted feature map F
DF
∈ R
H×W×C
, we
apply P (P = 2 in Figure 4) upsampling transforma-
tions F
DF
→F
0
U
∈ R
H
0
×W
0
×C
and F
DF
F
00
U
∈ R
H
0
×W
0
×C
,
respectively. Our goal is to ensemble features to
adaptively obtain more accurate reconstructions, so
we use the gating mechanism to control the informa-
tion flows from multiple branches carrying different
upsampled information. The gate fuses information
from all branches to achieve this goal via an element-
wise summation:
F
U
= F
0
U
+ F
00
U
(18)
Then we embed the parallel information by a soft
attention across channels. We compute the compact
feature descriptor Z ∈ R
1×1×C
using the same way as
described in Section 3.3, and apply a softmax operator
on the channel-wise elements:
M
0
U
=
e
W
0
U
Z
e
W
0
U
Z
+ e
W
00
U
Z
, M
00
U
=
e
W
00
U
Z
e
W
0
U
Z
+ e
W
00
U
Z
, (19)
where W
0
U
, W
00
U
∈ R
C×C
. In the case of two branches,
the final upscaled feature map F
UF
is obtained
through the attention weights on parallel features:
F
UF
= W
0
U
· F
0
U
+W
00
U
· F
00
U
(20)
Note that we introduce the formulas for the two-
branch case and one can easily generalize to more
branches by extending Eqs. 18, 19 and 20.
3.5 More Details
In this subsection we show more implementation de-
tails of our proposed UAN. We use the RAG number
Upsampling Attention Network for Single Image Super-resolution
403

Table 1: Effectiveness of RAG structure. We show the best PSNR (dB) values on Set5 (4×) in 5.5 × 10
5
iterations.
local skip connection × X × × X X × X
channel attention × × X × X × X X
spatial attention × × × X × X X X
PSNR on Set5 (2×) 31.97 32.08 32.04 32.06 32.12 32.14 32.07 32.21
as G = 10. In each RAG, we use RFAB number as
B = 20. We set the upsampling branches P = 3 in
UAB. We use 1 × 1 as the size of convolution layers
during downscaling and upscaling in channel atten-
tion, where the reduction ratio r is set as 16. For other
convolutional filters, the number and size of filters are
respectively set as 64 and 3×3, and the same padding
strategy is used to keep size fixed. For the upsampling
method, we follow the work (Zhang et al., 2018)(Dai
et al., 2019) and use ESPCNN (Shi et al., 2016) to
reconstruct fine resolution features from coarse ones.
One convolutional layer was used in the tail, which
has 3 features to output RGB-channel color images.
4 EXPERIMENTS
4.1 Setups
Now we introduce experimental setups.
Datasets and Degradation Models. We use HR im-
ages from DIV2K (Timofte et al., 2017) datasets as
training sets following (Zhang et al., 2018). Four
standard benchmarks datasets are used for testing:
Set5 (Bevilacqua et al., 2012), Set14 (Zeyde et al.,
2010), BSDS100 (Martin et al., 2002), and Urban100
(Huang et al., 2015). We use Bicubic (BI) degradation
models for experiments.
Training Settings. During training, we apply random
rotation by 90
◦
, 180
◦
, 270
◦
and horizontal flipping
as data augmentation. We use 16 LR color patches
with size 48 × 48 as inputs in training batches. Our
model is trained by Adam optimizor with β
1
= 0.9,
β
2
= 0.999, and ε = 10
−8
. We initialize the learn-
ing rate as 10
−4
and then decrease one half every 500
epochs. All the experiments have been implemented
on PyTorch on four Titan V GPUs.
Evaluation Metrics. All the results are evaluated us-
ing PSNR and SSIM metrics. In order to compare
with state-of-the-art models, we transform the results
from RGB space to YCbCr space, and evaluate them
on Y channel.
4.2 Ablation Study
In this subsection, we study the effectiveness about
two main components of our UAN, residual attention
group (RAG) and upsampling attention block (UAB).
Residual Attention Group (RAG). We train RAG
with its variants and test them on Set5 benchmark to
demonstrate the effects of different structures, and the
evaluation results are listed in Table 1. We set a ba-
sic baseline model that only contains convolutional
layers, which has the same layer number as all the
other control models. We can see that the baseline
model obtains PSNR = 31.97 dB on Set5 (×2). When
we add different structures to the module, the perfor-
mance improves to varying degrees. Specifically, the
performance is improved to 32.08 dB when the lo-
cal skip connection is applied alone. We further ob-
serve that we can always obtain better performance
when we combine it with other methods. These re-
sults show that local skip connection is essential for
building a deep network. We also study the effect
of channel attention and spatial attention. When we
add channel attention or spatial attention, the perfor-
mance move to 32.12 dB and 32.14 dB. It indicates
that paying more attention to the extracted features is
more important than naively deepening the network.
When we put all the structures together, the perfor-
mance reaches 32.21 dB. These comparisons demon-
strate the effectiveness of our RAG.
Upsampling Attention Block (UAB). We further
study the number of parallel upsampling processes
on final performance and model complexity. Specif-
ically, we set the parameter P, the number of upsam-
pling transformations, to 1, 2, 3 and 4 respectively.
We show the PSNR values under different conditions
and mark the parameters of different networks in Ta-
ble 2. We observe that when there are more paral-
lel paths, the model can converge to a higher PSRN
value. This shows that although parallel upsampling
processes share the same feature extraction part, they
can produce different high-resolution features. Inte-
grating these features by attention mechanism can ef-
fectively improve performance at the cost of a small
increase in parameters. In order to compare with other
models, we set P = 3 in this paper, which makes our
UAN has similar parameters as SAN.
Table 2: Investigations of UAB structure. All the models
are evaluated on Set5 (2×) in 5 × 10
4
iterations.
Branch 1 2 3 4
PSNR 37.90 37.94 37.96 37.97
Para. 15.4M 15.6M 15.7M 15.9M
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
404

Urban100 (4×):
img 092
HR SRCNN FSRCNN VDSR LapSRN
PSNR/SSIM 20.72/0.6265 20.22/0.6087 21.60/0.7092 21.66/0.7138
EDSR DBPN RCAN SAN UAN
22.50/0.7660 22.36/0.7648 23.11/0.8062 23.06/0.8040 23.77/0.8322
Urban100 (4×):
img 024
HR SRCNN FSRCNN VDSR LapSRN
PSNR/SSIM 22.13/0.6354 20.69/0.5710 22.87/0.7070 22.84/0.7108
EDSR DBPN RCAN SAN UAN
23.66/0.7655 23.61/0.7601 24.31/0.8162 23.99/0.8038 25.86/0.8547
Figure 5: Visual comparisons for 4× SISR on Urban100 dataset. The best results are highlighted.
4.3 Results on Single Image
Super-resolution
To show the advantage of our UAN, we compare
our model with 8 state-of-the-art models: SRCNN
(Dong et al., 2014), FSRCNN (Dong et al., 2016),
VDSR (Kim et al., 2016), LapSRN (Lai et al., 2017),
EDSR (Lim et al., 2017), DBPN (Muhammad et al.,
2018), RCAN (Zhang et al., 2018), and SAN (Dai
et al., 2019). Following RCAN, we also apply self-
ensemble strategy to our model denoted as UAN+ to
further improve performance.
Objective Metrics. Quantitative results by
PSNR/SSIM are shown in Table 3. Our UAN+
obtains the best results on all the datasets on different
scaling factors compared with other models. Even
without self-ensemble, our UAN performs compara-
ble results as RCAN and SAN and outperforms other
methods. We observe that there is a performance gap
between attention based models and other models,
and UAN performs best among attention based
models. It’s because our model can simultaneously
utilize channel- and spatial-wise feature correlations
for stronger feature expressions. We further notice
that our model performs better on higher scaling
factors (e.g., the PSNR gains of UAN over SAN for
Set5 are 0.13 dB on 8× and 0.02 dB on 2×). This is
because when the factor is larger, the LR image can
provide less information. If the model does not learn
the appropriate features during upsampling, it will
cause information bottlenecks.
Visual Qualities. We show visual results compared
to other methods in Figure 5. We can observe that
most of the SISR models fail to recover the patterns
and suffer from severe blur artifacts. In contrast, our
Table 3: Performance comparison with state-of-the-art al-
gorithms for SISR. Best results are bold numbers.
Set5 Set14 BSDS100 Urban100
Method Scale PSNR SSIM PSNR SSIM PSNR SSIM PSNR SSIM
Bicubic ×2 33.66 0.9299 30.24 0.8688 29.56 0.8431 26.88 0.8403
SRCNN ×2 36.66 0.9542 32.45 0.9067 31.36 0.8879 29.50 0.8946
FSRCNN ×2 37.05 0.9560 32.66 0.9090 31.53 0.8920 29.88 0.9020
VDSR ×2 37.53 0.9590 33.05 0.9130 31.90 0.8960 30.77 0.9140
LapSRN ×2 37.52 0.9591 33.08 0.9130 31.08 0.8950 30.41 0.9101
EDSR ×2 38.11 0.9602 33.92 0.9195 32.32 0.9013 32.93 0.9351
D-DBPN ×2 38.09 0.9600 33.85 0.9190 32.27 0.9000 32.55 0.9324
RCAN ×2 38.27 0.9614 34.12 0.9216 32.41 0.9027 33.34 0.9384
SAN ×2 38.31 0.9620 34.07 0.9213 32.42 0.9028 33.10 0.9370
UAN (ours) ×2 38.33 0.9623 34.11 0.9214 32.42 0.9030 33.35 0.9389
UAN+ (ours) ×2 38.35 0.9624 34.17 0.9223 32.51 0.9040 33.52 0.9401
Bicubic ×4 28.42 0.8104 26.00 0.7027 25.96 0.6675 23.14 0.6577
SRCNN ×4 30.48 0.8628 27.50 0.7513 26.90 0.7101 24.52 0.7221
FSRCNN ×4 30.72 0.8660 27.61 0.7550 26.98 0.7150 24.62 0.7280
VDSR ×4 31.35 0.8830 28.02 0.7680 27.29 0.7251 25.18 0.7540
LapSRN ×4 31.54 0.8850 28.19 0.7720 27.32 0.7270 25.21 0.7560
EDSR ×4 32.46 0.8968 28.80 0.7876 27.71 0.7420 26.64 0.8033
D-DBPN ×4 32.47 0.8980 28.82 0.7860 27.72 0.7400 26.38 0.7946
RCAN ×4 32.63 0.9002 28.87 0.7889 27.77 0.7436 26.82 0.8087
SAN ×4 32.64 0.9003 28.92 0.7888 27.78 0.7436 26.79 0.8068
UAN (ours) ×4 32.66 0.9005 28.92 0.7889 27.79 0.7439 26.86 0.8107
UAN+ (ours) ×4 32.71 0.9016 28.97 0.7922 27.83 0.7453 27.02 0.8129
Bicubic ×8 24.40 0.6580 23.10 0.5660 23.67 0.5480 20.74 0.5160
SRCNN ×8 25.33 0.6900 23.76 0.5910 24.13 0.5660 21.29 0.5440
FSRCNN ×8 20.13 0.5520 19.75 0.4820 24.21 0.5680 21.32 0.5380
VDSR ×8 25.93 0.7240 24.26 0.6140 24.49 0.5830 21.70 0.5710
LapSRN ×8 26.15 0.7380 24.35 0.6200 24.54 0.5860 21.81 0.5810
EDSR ×8 26.96 0.7762 24.91 0.6420 24.81 0.5985 22.51 0.6221
D-DBPN ×8 27.21 0.7840 25.13 0.6480 24.88 0.6010 22.73 0.6312
RCAN ×8 27.31 0.7878 25.23 0.6511 24.96 0.6058 22.97 0.6452
SAN ×8 27.22 0.7829 25.14 0.6476 24.88 0.6011 22.70 0.6314
UAN (ours) ×8 27.35 0.7880 25.22 0.6509 24.98 0.6053 22.96 0.6433
UAN+ (ours) ×8 27.41 0.7909 25.25 0.6518 25.00 0.6060 22.98 0.6460
UAN recovers more details and reconstructs accurate
results. For “img 092”, most compared models gen-
erate the lines with wrong directions or even cannot
produce lines, and only our UAN recovers the right
result. For “img 024”, the early models (e.g., SR-
CNN, FSRCNN, VDSR and LapSRN) fail to recover
the main structure. The recent proposed EDSR and
DBPN can reconstruct the basic contour but lose de-
tails. Compared with HR image, RCAN, SAN and
UAN gain sharp results and reconstruct more details,
but UAN obtains higher qualities. These comparisons
demonstrate that our UAN can better utilize spatial
and channel features for recovering more finer results.
Upsampling Attention Network for Single Image Super-resolution
405

5 CONCLUSION
In this work, we propose a deep upsampling atten-
tion network (UAN) for accurate SISR. Specifically,
the residual attention groups (RAGs) based structure
allows UAN to capture the structure and frequency in-
formation by rescaling spatial- and channel-wise fea-
tures. Meanwhile, RAG allows abundant residual in-
formation to be bypassed through non-local skip con-
nections, making the network more effective. Further-
more, in addition to improve the ability of our model,
we propose an upsampling attention block (UAB) to
adaptively combine parallel upsampled features by
considering correlations among them. Experimental
results on standard benchmarks show that our UAN
achieves better accuracy and visual quality over state-
of-the-art methods.
ACKNOWLEDGEMENTS
This work is funded by the National Key Research
and Development Program of China under the pro-
gram number 2017YFC0810200.
REFERENCES
Freeman, W.T., Pasztor, E.C., and Carmichael, O.T. (2000).
Learning low-level vision. In International Journal of
Computer Vision (IJCV), pages 25–47. Springer.
Dong, C., Loy, C., He, K., and Tang, X. (2014). Learn-
ing a deep convolutional network for image super-
resolution. In European Conference on Computer Vi-
sion (ECCV), pages 184–199. Springer.
Kim, J., Lee, J., and Lee, K. (2016). Accurate image super-
resolution using very deep convolutional networks. In
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 1646–1654. IEEE.
Lai, W., Huang, J., Ahuja, N., and Yang, M. (2017). Deep
laplacian pyramid networks for fast and accurate su-
perresolution. In Conference on Computer Vision and
Pattern Recognition (CVPR), pages 624–632. IEEE.
Dong, C., Loy, C., and Tang, X. (2016). Deeply recursive
convolutional network for image super-resolution. In
European Conference on Computer Vision (ECCV),
pages 1637–1645. Springer.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep
residual learning for image recognition. In Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 770–778. IEEE.
Lim, B., Son, S., Kim, H., Nah, S., and Lee, K. (2017).
Enhanced deep residual networks for single image
super-resolution. In Computer Society Conference on
Computer Vision and Pattern Recognition Workshops
(CVPRW), pages 136–144. IEEE.
Muhammad, H., Shakhnarovich, G., and Ukita, N. (2018).
Deep back-projection networks for super-resolution.
In Conference on Computer Vision and Pattern Recog-
nition (CVPR), pages 1664–1673. IEEE.
Zhang, Y., Li, K., Li, K., Wang, L., Zhong, B., and Fu, Y.
(2018). Image super-resolution using very deep resid-
ual channel attention networks. In European Con-
ference on Computer Vision (ECCV), pages 286–301.
Springer.
Dai, T., Cai, J., Zhang, Y., Xia, S., and Zhang, L.
(2019). Second-order attention network for single im-
age super-resolution. In Conference on Computer Vi-
sion and Pattern Recognition (CVPR), pages 11065–
11074. IEEE.
Shi, W., Caballero, J., Huszar, F., Totz, J., Aitken, A.,
Bishop, R., Rueckert, D., and Wang, Z. (2016). Real-
time single image and video super-resolution using an
efficient sub-pixel convolutional neural network. In
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 1874–1883. IEEE.
Hu, J., Shen, L., and Sun, G. (2018). Squeeze-and-
excitation networks. In Conference on Computer Vi-
sion and Pattern Recognition (CVPR), pages 7132–
7141. IEEE.
Woo, S., Park, J., Lee, J., and I.S., K. (2018). Cbam:
Convolutional block attention module. In European
Conference on Computer Vision (ECCV), pages 3–19.
Springer.
Timofte, R., Agustsson, E., Gool, L., Yang, M., and Zhang,
L. (2017). Ntire 2017 challenge on single image
super-resolution: Methods and results. In Computer
Society Conference on Computer Vision and Pattern
Recognition Workshops (CVPRW), pages 114–125.
IEEE.
Bevilacqua, M., Roumy, A., Guillemot, C., and Morel,
A. (2012). Low-complexity single-image super-
resolution based on nonnegative neighbor embedding.
In The British Machine Vision Conference (BMVC),
pages 135.1–135.1. Springer.
Zeyde, R., Elad, M., and Protter, M. (2010). On single im-
age scale-up using sparse-representations. In 7th Int.
Conf. Curves Surf., pages 711–730.
Martin, D., Fowlkes, C., Tal, D., and Malik, J. (2002). A
database of human segmented natural images and its
application to evaluating segmentation algorithms and
measuring ecological statistics. In International Con-
ference on Computer Vision (ICCV), pages 416–423.
IEEE.
Huang, J., Singh, A., and Ahuja, N. (2015). Single image
super-resolution from transformed self-exemplars. In
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 5197–5206. IEEE.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
406
