
RCM: Requirement Capturing Model for Automated Requirements
Formalisation
Aya Zaki-Ismail
1 a
, Mohamed Osama
1 b
, Mohamed Abdelrazek
1 c
, John Grundy
2 d
and Amani Ibrahim
1 e
1
Information Technology Institute, Deakin University, 3125 Burwood Hwy, VIC, Australia
2
Information Technology Institute, Monash University, 3800 Wellington Rd., VIC, Australia
Keywords:
Requirement Representation, Requirement Modeling, Requirement Engineering, Requirement Formalisation.
Abstract:
Most existing automated requirements formalisation techniques require system engineers to (re)write their
requirements using a set of predefined requirement templates with a fixed structure and known semantics to
simplify the formalisation process. However, these techniques require understanding and memorising require-
ment templates, which are usually fixed format, limit requirements captured, and do not allow capture of more
diverse requirements. To address these limitations, we need a reference model that captures key requirement
details regardless of their structure, format or order. Then, using NLP techniques we can transform textual
requirements into the reference model. Finally, using a suite of transformation rules we can then convert
these requirements into formal notations. In this paper, we introduce the first and key step in this process, a
Requirement Capturing Model (RCM) - as a reference model - to model the key elements of a system require-
ment regardless of their format, or order. We evaluated the robustness of the RCM model compared to 15
existing requirements representation approaches and a benchmark of 162 requirements. Our evaluation shows
that RCM breakdowns support a wider range of requirements formats compared to the existing approaches.
We also implemented a suite of transformation rules that transforms RCM-based requirements into temporal
logic(s). In the future, we will develop NLP-based RCM extraction technique to provide end-to-end solution.
1 INTRODUCTION
Formal verification techniques requires system re-
quirements to be expressed in formal notations
(Buzhinsky, 2019). However, the majority of critical
system requirements are still predominantly written in
informal notations (textual or natural languages - NL),
which are inherently ambiguous and have incomplete
syntax and semantics (L
´
ucio et al., 2017b; Sl
´
adekov
´
a,
2007). To automate the formalisation process, sev-
eral bodies of work within the literature focused
on proposing pre-defined requirement templates, pat-
terns (Justice, 2013), boilerplates (Mavin et al., 2009),
and structured control English (R. S. Fuchs, 1996), to
express one system requirement sentence while elim-
inating the ambiguities. Such templates have com-
plete syntax to ensure the feasibility of transform-
a
https://orcid.org/0000-0002-1580-6619
b
https://orcid.org/0000-0002-6940-0833
c
https://orcid.org/0000-0003-3812-9785
d
https://orcid.org/0000-0003-4928-7076
e
https://orcid.org/0000-0001-8747-1419
ing textual requirements into formal notations using
a suite of manually crafted, template-specific trans-
formation rules (e.g., (Yan et al., 2015)). However,
some of the predefined templates are domain depen-
dent and are hard to generalise (Rupp, 2009), or can
only capture limited subsets of requirements struc-
tures (R. S. Fuchs, 1996). In addition, most exist-
ing formalisation algorithms are customized for trans-
forming system requirements to one target formal lan-
guage. Thus, a need to transform the same require-
ments into different formal languages mandates sig-
nificant rework of the formalisation algorithm.
Complementary to this research direction, in-
stead of considering introducing new sentence-based
templates covering a wider range of requirements
and complicating the requirements specification pro-
cess, we introduce a Requirement Capturing Model
(RCM), as a reference model that defines the key
properties that make up a system behavioral require-
ment sentence, regardless of the syntactic structure of
these properties, lexical-words, or their order. RCM
separates the writing styles (format and structure)
110
Zaki-Ismail, A., Osama, M., Abdelrazek, M., Grundy, J. and Ibrahim, A.
RCM: Requirement Capturing Model for Automated Requirements Formalisation.
DOI: 10.5220/0010270401100121
In Proceedings of the 9th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2021), pages 110-121
ISBN: 978-989-758-487-9
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

from the abstract requirement properties and the for-
mal notations. Our new RCM model thus enables
us to: (1) represent a much wider range of require-
ments that have differing count, order or types of
properties, by identifying the specific properties in the
input requirement sentence to generic RCM defined
properties; (2) specify requirements in a wide vari-
ety of different formats, extremely useful to avoid re-
writing existing requirements; (3) formalize require-
ments into different formal notations through map-
ping RCM properties to those of the target formal
notation; and (4) enable use of NLP-based require-
ments extraction techniques to transform textual re-
quirements into the RCM-based requirements model.
with the key elements to be extracted now clearly de-
fined and known. Our key contributions in this paper
are:
• Introduce RCM as a reference model and interme-
diate representation between informal and formal
notations.
• A suite of transformation rules from RCM to Met-
ric Temporal Logic (MTL), to demonstrate how
an RCM-based requirements model can be trans-
formed into formal notations.
• Evaluating the RCM representation power by
comparing it to 15 other existing approaches us-
ing 162 behavioral requirements for critical sys-
tems. We provide the RCM representation and
corresponding automatically generated (MTL and
CTL) formal notations for the 162 requirements.
2 MOTIVATION
Jen is a system engineer working for an automotive
company. She wants to specify the requirements of
one of the system modules - a small excerpt is shown
in Table 1 - while making sure that these require-
ments can be easily transformed into formal notations
as a mandatory compliance requirement. Jen decided
to check the existing requirement specification tech-
niques in the literature to choose which one covers
most of her requirements. Jen researched existing re-
quirements formalisation techniques, see the related
work section for these techniques, and outlined her
trials to use these techniques to model her require-
ments after rephrasing some of her requirements to
suit existing templates.
Jen found that none of the existing techniques
she found can be used to cover all her require-
ments. She then had to learn and use all these tem-
plates and have these tools all running. Further-
more, Jen found that the majority of these solutions
Table 1: Examples of critical system requirements and ap-
proaches to represent.
RQ1: R STATUS shall indicate the rain sensor. It shall be
ON, when the external environment is raining.
Techniques: Universal pattern (Teige et al., 2016), Struc-
tured English (Konrad and Cheng, 2005), Rup’s boilerplates
(Rupp, 2009), ACE(R. S. Fuchs, 1996), EARS(Mavin et al.,
2009), CFG(Sl
´
adekov
´
a, 2007) and BTC(Justice, 2013)
RQ2: When the external environment rains for 1 minute, the
wipers shall be activated within 30 seconds until the rain sen-
sor equals OFF.
Techniques: Universal pattern (Teige et al., 2016) and
BTC(Justice, 2013)
RQ3: While the wipers are active, the wipers speed shall be
readjusted every 20 seconds.
Techniques: Structured English (Konrad and Cheng, 2005)
rely on pre-defined formats and structure of require-
ments boilerplates. This mandates (1) a fixed or-
der of requirement components/sub-components, (2)
a fixed English-syntax for a specific component/sub-
component, (3) a fixed/small set of English verbs or
other lexical words. Thus, Jen needs to rewrite her re-
quirements to confirm the defined format which puts
more overhead on her especially if the defined formats
are limited and cannot be extended to new scenarios.
Taking into consideration all combinations of
styling, ordering, and omission/existence of different
requirements model properties will increase the size
of the defined formats. Consequently this will in-
crease the complexity of using them by system en-
gineers and the complexity of the parsing algorithms
needed to transform them to formal models. Fur-
thermore, most existing formalization techniques ap-
ply on-the fly transformation on the given structured
requirement sentences to generate formal notations.
These transformations are hard-coded or tightly cus-
tomized according to the target formal notation prop-
erties and formats. It would be much more useful if
the common parts are computed once and transformed
to intended notations as needed.
3 RELATED WORK
Many requirements formalisation approaches assume
requirements are specified in a constrained natural
language (CNL) with specific style, format and struc-
ture to be able to transform into formal notations -
e.g. (Ghosh et al., 2016; Nelken and Francez, 1996;
Michael et al., 2001; Holt and Klein, 1999; Ambriola
and Gervasi, 1997; Sturla, 2017; Pease and Li, 2010).
These CNL are meant to avoid natural language re-
RCM: Requirement Capturing Model for Automated Requirements Formalisation
111

lated quality problems (e.g., ambiguity inconsistency,
etc.) and increase the viability of automating the for-
malisation process.
CNL is a restricted form of NL, created for writing
technical documents as defined in (Kittredge, 2003)
with the aim to reduce/avoid NL problems (e.g., am-
biguity inconsistency, .etc). CNL typically has a de-
fined sub-set of NL grammar, lexicon and/or sen-
tence structure (Kuhn, 2014). Different forms of CNL
are also provided as a reliable solution for require-
ments representation. Fuchs et al. (R. S. Fuchs,
1996) propose Attempto Controlled English (ACE)
with a restricted list of verbs, nouns and adjectives for
the requirement set in addition to restrictions on the
structure of the sentence. ACE can be transformed
into Prolog. It can handle requirements with con-
dition and action components. Multiple CNLs pro-
posed later inspired by ACE (e.g., Atomate language
(Van Kleek et al., 2010), PENG(Schwitter, 2002)) for
formal generation purposes and for other purposes
(e.g., BioQuery-CNL (Erdem and Yeniterzi, 2009)).
Similarly to ACE, Scott and Cook(Scott et al.,
2004) presented Context Free Grammars (CFGs) for
requirement specification. Although the format of
the requirement components is more limited than
ACE with additional restrictions on words, it cov-
ers time-related properties. Yan et al. (Yan et al.,
2015) presented a more flexible CNL with constraints
on the word set such that, a clause should con-
tain (1) single word noun as a subject and a verb
predicate with one of the following formats ”verb
| be+(gerund|participle) | be+complement”, (2) the
complement should be adjective or adverbial word,
(3) prepositional phrases are not allowed except ”in +
time point” at the end of the clause. The CNL does not
consider time information except pre-elapsed time.
Boilerplates are also widely used. These provide
a fixed syntax and lexical words with replaceable at-
tributes. Boilerplates are more limited than CNL and
require adaptation to different domains. In (Rupp,
2009), the provided RUP’s boilerplate can handle a
limited range of requirements. EARS (Mavin et al.,
2009) boilerplates are less restricted and can support
a wider range of requirements. Esser et al. (Esser
and Struss, 2007) proposed a suite of requirement
templates (TBNLS) with support mapping to proposi-
tional logic with temporal relations. For validating the
conformity of the written requirement and the boil-
erplate, authors in (Arora et al., 2013; Arora et al.,
2014) provide checking techniques.
Requirement patterns provide a more flexible so-
lution. However, When a new requirement struc-
ture is added, a new pattern should be created for
it, which increases the size of the patterns set. In
(Teige et al., 2016) a universal pattern was presented
to support many requirements formats (trigger, then
action). They then introduced additional time-based
kernel patterns in (Justice, 2013). Although these
patterns cover many requirement properties, they do
not still cover the possible combinations of the sup-
ported properties eligible to one requirement specifi-
cation. In addition, the approach lack complex time
properties - e.g. In-between-time and pre-elapsed-
time properties. Dwyer et al. (Dwyer et al., 1999)
proposed several patterns applicable for non-real-time
requirement specifications. These patterns are cate-
gorized into two major groups: occurrence patterns
and order patterns, while considering scopes (e.g.,
globally, before R, after R) for a given specifica-
tion pattern. The work is extended later in (Konrad
and Cheng, 2005) to cope with real-time requirement
specifications. The real time patterns considers ver-
sions of the pre-elapsed-time, in-between-time and
valid-time information for the action component.
Event-Condition-Action (ECA) was initially pro-
posed in active databases area to express behavioral
requirements. ECA became widely used by several
researchers in diffident areas. An ECA rule assumes
that when an event E occurs, the condition C will be
evaluated, and if true, the action A will be executed.
ECA notations have been extended to capture time in-
formation (Qiao et al., 2007). However, ECA rules
do not support (e.g., factual rules), and do not con-
sider scopes for action and the time notations apply
on events.
4 REQUIREMENT CAPTURING
MODEL
In this section, first, we explain the process we fol-
lowed to develop the RCM. Then, we describe the
RCM metamodel in details. Finally, we provide RCM
to formal notations transformation procedure.
4.1 RCM Development Process
To identify the key requirement properties we needed
to support in a generic reference model for safety-
critical requirements, we reviewed a large number of
natural language-based critical system requirements
collected from many sources: (Jeannet and Gaucher,
2016; Thyssen and Hummel, 2013; Fifarek et al.,
2017; L
´
ucio et al., 2017a; Dick et al., 2017; Bitsch,
2001; Teige et al., 2016; L
´
ucio et al., 2017b; Mavin
et al., 2009; R. S. Fuchs, 1996; Rolland and Proix,
1992; Macias and Pulman, 1995) and 15 requirement
representation approaches listed in Table.3.
MODELSWARD 2021 - 9th International Conference on Model-Driven Engineering and Software Development
112
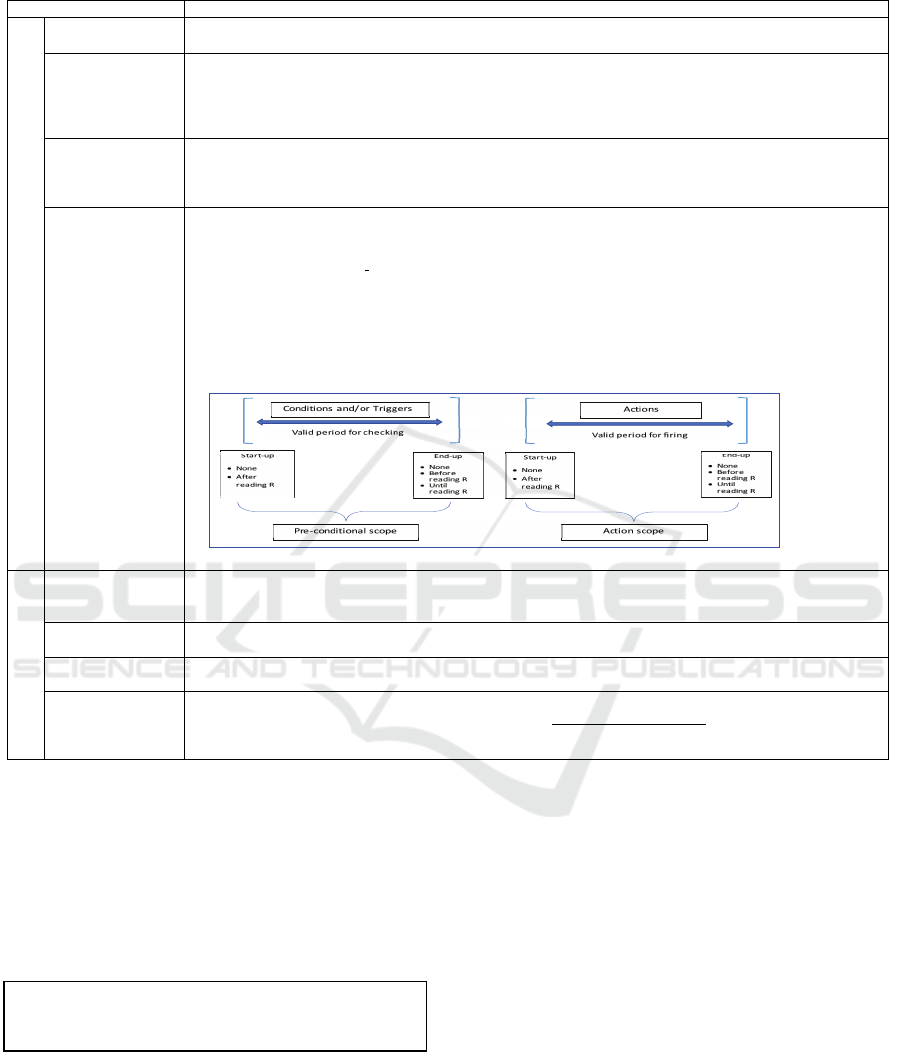
Table 2: A list of identified requirement properties from existing approaches.
Property Description
Trigger
is an event that initiates action(s) (e.g., ”when the system halts” in Figure 3). This component type is ubiquitous
throughout the requirements of most critical systems.
Condition
is a constraint that should be satisfied to allow a specific system action(s) to happen (e.g., ”if X is ON” in Figure
3). In contrast to triggers, the satisfaction of the condition should be checked explicitly by the system. The
system is not concerned with ”when the constraint is satisfied” but with ”is the constraint satisfied or not at the
checking time” to execute the action (e.g., in the previous example ”X” might remain ”ON” for a while and
have no effect on the system until checked for.
Component
Action
is a task that should be accomplished by the system in response to triggers and/or constrained by conditions
(e.g., ”M should be set to TRUE” in Figure 3). In case that, a primitive requirement consists of an action
component only, it would be marked as a factual rule expressing factual information about the system (e.g.,
The duration of a flashing cycle is 1 second (Houdek, 2013)).
Req-scope
determines the context under which (i) ”condition(s) and trigger(s)” can be valid – called a pre-conditional
scope as it is linked to the condition or trigger; and (ii) ”action(s)” can occur – called an action scope, as it
applies only on the action. The scope may define the starting boundary or the ending one (e.g., ”after sailing
termination”, ”before <B sig> is True” in Figure 3).
Figure 3 presents the main variations for starting/ending a context (e.g., None, after operational con-
straint is true, until operational constraint becomes true or before operational constraint becomes true).
Other alternatives can be expressed by the main variation. For example, ”while R is true” can be
expressed by after and until as ”after R is true” and ”until not R”. It is worth noting that, ”Be-
fore” and ”Until” define the same end of the valid period which is ”R is true”. ”Until” mandates
the precondition(s)/action(s) to hold till ”R is true”, but ”Before” does not care about their status.
!
!
!
!
!
!
!
!
!
!
!!"#$%&'&#$(! )$%*#+!,+&--.+(!
/0'&#$(!
1')+'234
!
• 5#$.!
• /6'.+!
+.)%&$-!7!
1')+'234!
• 5#$.!
• /6'.+!
+.)%&$-!7!
8$%234!
• 5#$.!
• 9.6#+.!
+.)%&$-!7!
• :$'&;!
+.)%&$-!7!
8$%234!
• 5#$.!
• 9.6#+.!
+.)%&$-!7!
• :$'&;!
+.)%&$-!7!
<);&%!4.+&#%!6#+!6&+&$-!
<);&%!4.+&#%!6#+!0=.0>&$-!
?+.20#$%&'&#$);!(0#4.!
/0'&#$!(0#4.!
@!
Valid-time
represent the valid time period of the given component (e.g., in ”the vehicle warns the driver by acoustical
signals < E > for 1 second” the action is hold for 1 second length of time (Houdek, 2013)). Valid-time can be
a part of any component.
Sub-Component
Pre-elapsed-time
is the consumed time length from an offset point –before an action to occur or a condition to be checked (e.g.,
”After less than 2 seconds” in Figure 3). This type is only eligible to action and condition components.
In-between-time
express the length of time between two consecutive events to occur in the repetition case (e.g., ”every 1 seconds”
in Figure 3). Such sub-component type is eligible to action and trigger components as indicated in Figure 2.
Hidden constraint
allows an explicit constraint to be defined on a specific operand within a component. For example, in ”if the
camera recognizes the lights of an advancing vehicle, the high beam headlight that is activated is reduced
to low beam headlight within 5 second”(Houdek, 2013). The that is activated is a constraint defined on the
operand the high beam headlight).
We identified 19 distinct properties that we grouped
into 8 abstract properties (4 components and 4 sub-
components). These are listed with their description
in Table.2. Figure 1 shows a manually crafted ex-
ample requirement that reflects most of these com-
ponents and sub-components used through the prop-
erties description for a better understanding.
REQ: After sailing termination, if X is ON for 1 second or (Y is ON and Z is ON), M
shall transition to TRUE after less than 2 seconds. When the acoustical signals <E>
turns to TRUE every 1 seconds, M shall transition to FALSE before <B_sig> is TRUE.
Figure 1: Crafted multi-sentence requirement ”REQ”.
We then analysed 15 of the existing approaches (out-
lined in the related work section) against these 19 re-
quirement properties as presented in Table.3. The ap-
proaches (rows) are encoded A1 to A15, and require-
ment properties are encoded as columns. An approach
can be represented in more than one row. This reflects
that some approaches might support multiple proper-
ties, but these properties cannot be used in the same
requirement – the template or pattern does not support
having certain properties in one requirement. The cell
value equals ”1” if the property is supported in this
template.
This table does not reflect the limita-
tions/restrictions that these approaches apply on
a given property formatting or order - i.e. condition
must come before action, or scope comes before
condition. Our analysis of this table illustrates that:
(1) no approach covers all requirement properties
possibly because this would make it too complex
to use; (2) almost all approaches support action
components as a core element; (3) approaches: A1
and A11 are the most expressive approaches as
they cover majority of the properties; and (4) the
valid-time property for the StartUp and the EndUP
RCM: Requirement Capturing Model for Automated Requirements Formalisation
113
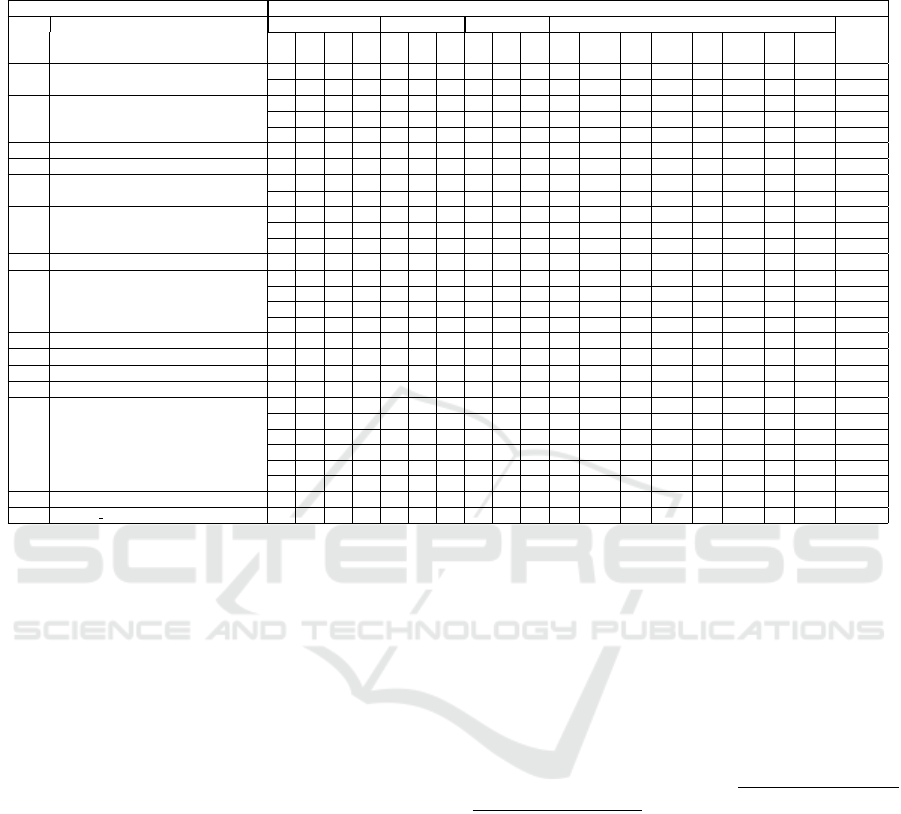
Table 3: Exisiting approaches proposed properties and Supported formats.
Properties Codes → A:action / C:condtion / T:trigger / hidden:Hidden-constraint / SP:pre-cond Startup-phase / EP:pre-cond
Endup-Phase / SA:action Startup-phase / EA:action Endup-phase / vt:valid-time / pt:pre-elapsed-time / rt:in-between-time
Approach Requirement properties
Action Condition Trigger Req-Scope
Code Source A A-
vt
A-
rt
A-
pt
C C-
vt
C-
pt
T T-
vt
T-
rt
SP SP-
vt
EP EP-
vt
SA SA-
vt
EA EA-
vt
Hidden
A1 BTC (Justice, 2013; Teige
et al., 2016)
1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1
A2
EARS (Mavin et al.,
2009)
1 1 1
1 1 1
1 1 1
A3 EARS-CTRL (L
´
ucio et al., 2017b) 1 1 1 1
A4 ECA (Van Kleek et al., 2010) 1 1 1 1 1 1 1 1 1
A5
boilerplates (Rupp, 2009)
1 1
1 1
A6
Safety templates (Fu
et al., 2017)
1 1 1 1 1
1 1 1 1 1 1
1 1 1 1 1
A7 Req Lang (Marko et al., 2015) 1 1 1 1 1 1
A8
CFG (Scott et al.,
2004; Sl
´
adekov
´
a, 2007)
1 1 1
1 1 1
1 1 1
1 1 1
A9 ACE (R. S. Fuchs, 1996) 1 1 1
A10 PENG (Schwitter, 2002) 1 1 1 1 1 1 1 1
A11 Structured English (Yan et al., 2015) 1 1 1 1 1 1 1 1
A12 TBNLS (Esser and Struss, 2007) 1 1 1 1 1 1 1
A13
Real-time (Konrad and
Cheng, 2005)
1 1 1 1
1 1 1 1
1 1 1 1
1 1 1 1 1
1 1 1 1 1
1 1 1 1 1
A14 Dawyer (Dwyer et al., 1999) 1 1 1 1 1
A15 Pattern based(Berger et al., 2019) 1 1 1 1 1
phases of the pre-conditional scope is not supported
by any of these approaches although its appearance
in the analysed requirements.
4.2 RCM Domain Model
The RCM is designed to capture the requirements
properties listed above while relaxing the ordering
and formatting restrictions presented by the existing
techniques. In RCM, a system is represented as a set
of requirements R. Each requirement R
i
represented
by one RCM and may have one or more primitive
requirements PR where {R
i
= < PR
n
> and n>0}.
Each PR
j
represents only one requirement sentence,
and may include condition(s), trigger(s), action(s) and
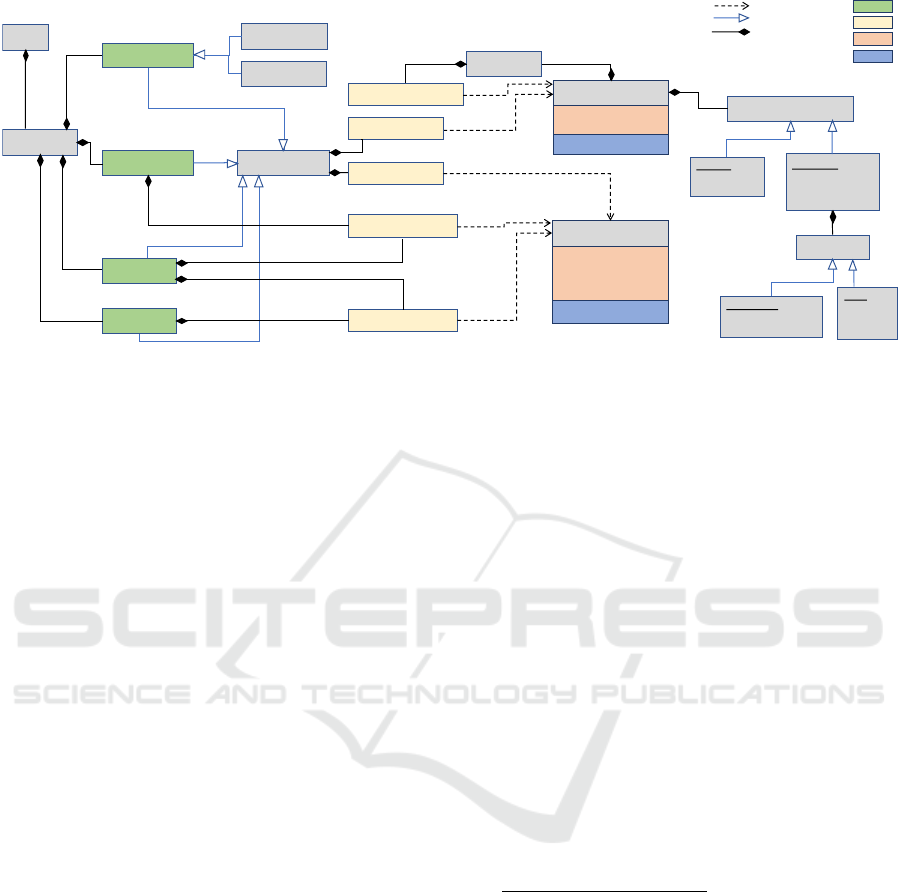
requirement scope(s). The detailed meta-model of the
RCM to one requirement R
i
is presented in Figure 2.
The figure shows that a primitive requirement is
composed of four requirement component types: con-
dition, trigger, action and requirement scope. Except
for action(s), the existence of each of these compo-
nents is optional in a primitive requirement. A re-
quirement component has a component core-segment
that expresses the main portion of the component, and
optionally could also have a valid-time: the compo-
nent’s valid time-length. The pre-elapsed-time sub-
component can only appear with a condition or action
component. An in-between-time sub-component can
only appear with Trigger or Action components ac-
cording to the reviewed scenarios (e.g., requirements
and representation formats). A hidden-constraint is
an optional sub-component to an operand. To store
this information without loss, RCM stores the hidden
constraint inside the relevant operand object as indi-
cated in Figure 2. This structure is intrinsic to allow
the nested hidden constraints. For example, ”the entry
of A1 whose index is larger than the first value in A2
that is larger than S1 shall be set to 0”.
All five sub-components are instances of either
Predicate or Time structure. The Predicate structure
consists of the operands, the operator and negation
flag/property (e.g., in ”if X exceeds 1” the ”X” and
”1” are the operands and ”exceeds” is the operator
in the semi-formal semantic and ”>” is the operator
in the formal semantic). The Time structure stores
the unit, value and quantifying relation (e.g., ”for
less than 2 seconds”, ”2” and ”seconds” are the unit
and value respectively, ”less than” is the semi-formal
quantifying relation whose formal semantic is ”<”).
Since the Predicate and Time structures are the in-
frastructure of the entire properties, they are designed
to encapsulate the semi-formal and formal semantic
allowing mappability to multiple TL. The details of
formal semantic are described in section.4.3.2.
MODELSWARD 2021 - 9th International Conference on Model-Driven Engineering and Software Development
114
Req
Ptim-Req
Condition
Action
Trigger
Pre-Conditional
Scope
Hidden Constraint
Valid-time
In-between-time
Argument
component
Req-scope
Pre-elapsed-time
Core-segment
Time
• Preposition
• Quantifying relation
• Value
• Unit
• Operator
• value
Formal Semantic
Process
• Process-Name
• Operands List
Relational
• LHS
• RHS
• Technical Operator
plain
• Operand
• Technical
Operator
RHS
Aggregated
• Operands List
• Aggregation Function
• Operands List
• Relation
• Formal Semantic
Predicate
1..*
0..*
1..*
0..*
0..*
0..1
0..1
0..1
0..1
0..1
1
0..1
1..*
1
Instance of Relation
Inheritance Relation
Aggregation Relation
Component
Sub-component
Semiformal Semantic
Formal Semantic
1
Action Scope
Figure 2: RCM meta-model (simplified).
Components with the same type can be stored as a
tree –the most suitable to keep nested relation appro-
priately, where leafs are the components, and inner
nodes are coordinating relationships (e.g., check the
conditions components of PR[1] in Figure 3).
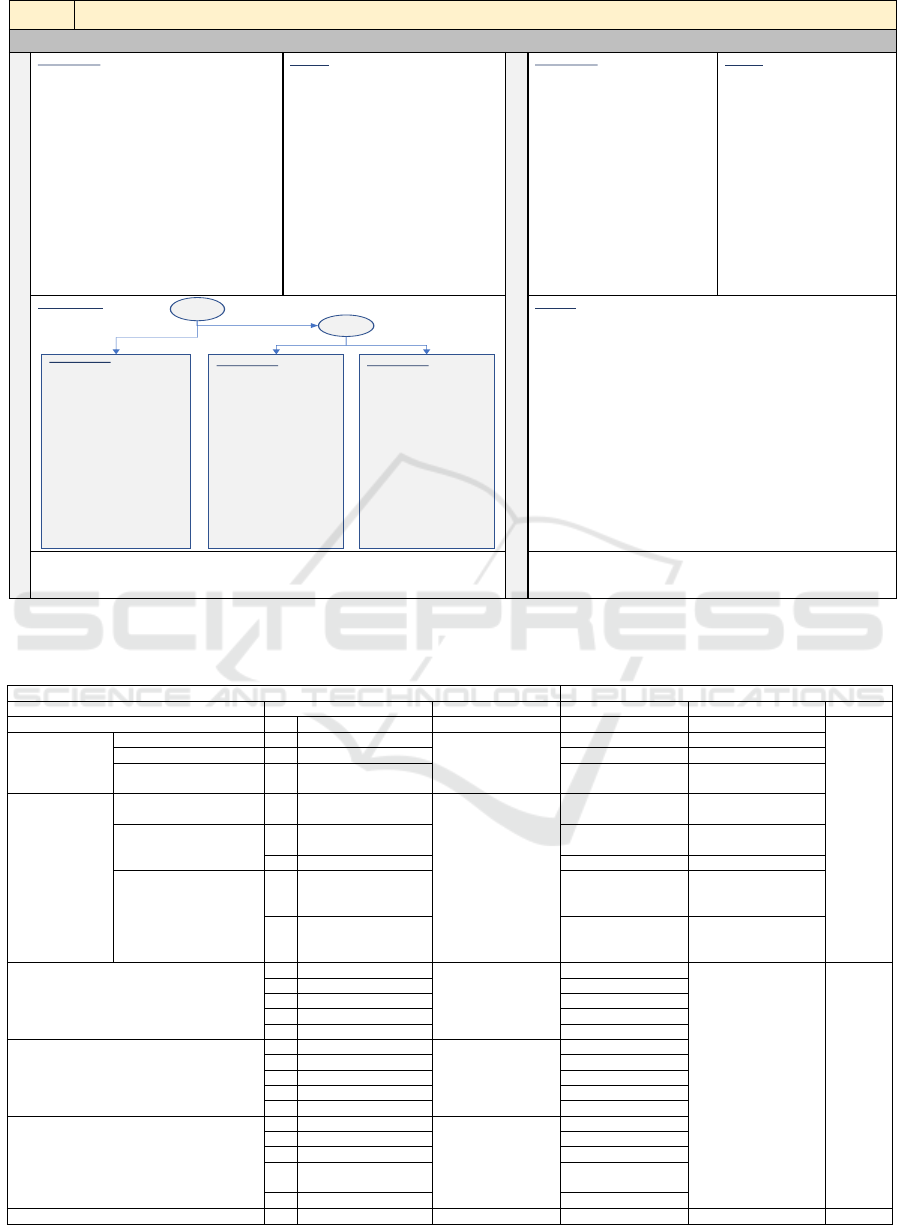
Figure 3, shows the RCM representation of the
REQ example. It has two primitive requirements:
PR[1] and PR[2]. Components of each primitive re-
quirement are presented in separate blocks in the fig-
ure. In each block, sub-components are separated by
horizontal line. Figure 3 highlights the encapsulation
of semi-formal semantic (in black) and formal seman-
tic (in red). Components with the same type (e.g.,
conditions in PR[1]) are represented by tree structure.
The figure also provides the the corresponding MTL
representation, see subSection.4.3.3.
4.3 RCM Transformation
In this section, we illustrate transformation into tem-
poral logic (TL)- as an example of formal notations.
We first illustrate: (1) the mapping between the RCM
to TL, and (2) the formalization of the RCM infras-
tructure (i.e., Predicate and Time structures). Then,
we provide the transformation process.
4.3.1 RCM and Temporal Logic
In order to formally model a given requirement rep-
resented by RCM in temporal logic (TL), we have
to define a set of transformation rules. A TL for-
mula F
i
is built from a finite set of proposition vari-
ables AP by making use of boolean connectives (e.g.,
”AND”, ”OR”) and the temporal modalities (e.g., U
(until)) (Haider, 2015; Brunello et al., 2019). Within
such formula, each proposition letter is expressed by
a true/false statement and may be attached with time
notation in some versions of temporal logic (e.g.,
MTL). Consider the following sentence:”After the
button is pressed, the light will turn red until the ele-
vator arrives at the floor and the doors open(Brunello
et al., 2019)”. Such sentence can be captured by the
following TL formula:
p =⇒ (qU(s ∧v))
where p, q, s, and v are proposition variables cor-
responding to ”the button being pressed”, ”the light
turning red”, ”the elevator arriving”, and ”the doors
opening”, respectively.
We use the following to build the mapping be-
tween RCM and TL:
1. Propositions and Time Notations: Given that,
RCM components and sub-components are ex-
pressed as predicates or time structures as indi-
cated in Figure 2. These structures are eventually
mapped to proposition and time notations in the
corresponding temporal logic formula (e.g., the
action component ”M shall Transition to TRUE
after less than 2 seconds” mapped to ”F
t<2
(S)”,
where S and ”t<2” represent the predicate in bold
and time phrase underlined).
2. Coordinating Relations: The booleans connect-
ing propositions can be obtained from coordi-
nating relations connecting multiple components
with the same types. Such relations are repre-
sented by tree for each component type as dis-
cussed before (e.g., the condition components ”X
is ON for 1 second or (Y is ON and Z is ON)”
mapped to ”(G
t=2
(C1) ∨(C2 ∧C3))”.
3. Temporal Modality: The temporal modalities
can be identified based on the component type
(e.g., the type of the component ”After sailing
termination” is ”pre-conditional-scope startup-
phase” mapped to ”=⇒”
RCM: Requirement Capturing Model for Automated Requirements Formalisation
115
REQ
After sailing termination, if X is ON for 1 second or (Y is ON and Z is ON), M shall transition to TRUE after less than 2 sec
onds.
When
the acoustical signals <E> turns to TRUE every 1 seconds, M shall transition to FALSE before <B_sig> is TRUE.
RCM of REQ
PR[1]
Req
-Scope
v
Pre-conditional Scope
ØScopeType = StartUpPhase
ØTimekeyword = after
ØCompText = “After sailing termination ”
ØPredicate
Ø Relation = equals
Ø Op1
ü Text = sailing termination
Ø Op2
ü Text = TRUE
Ø neg_flag = false
Ø Formal Semantic
ü LHS
è
sailing termination
ü RHS
è
TRUE
ü Operator
è
“=“
Action
Ø
CompText = “M shall transition to
TRUE after less than 2 seconds
”
v
Predicate
Ø Relation = shall transition to
Ø Op1
ü Text = M
Ø Op2
ü Text = TRUE
Ø neg_flag = false
Ø Formal Semantic
ü LHS
è
M
ü RHS
è
TRUE
ü Operator
è
“=“
-----------------------------------------------------------------------------
v
Pre-Elapsed-time
Ø Preposition = “after”
Ø Value= 2
Ø Unit= second
Ø QR = less than
Ø Formal Semantic
ü Operator
è
“<“
ü Value = 2
PR[2]
Req
-Scope
v
Action Scope
ØScopeType = EndUpPhase
ØTimekeyword = Before
ØCompText = “before <B_sig
> is
TRUE”
ØPredicate
Ø Relation = is
Ø Op1
ü Text = <B_sig>
Ø Op2
ü Text = TRUE
Ø neg_flag = false
Ø Formal Semantic
ü LHS
è
<B_sig>
ü RHS
è
TRUE
ü Operator
è
“=“
Action
Ø
CompText = “M shall
transition to FALSE
”
v
Predicate
Ø Relation = shall transition
to
Ø Op1
ü Text = M
Ø Op2
ü Text = FALSE
Ø neg_flag = false
Ø Formal Semantic
ü LHS
è
M
ü RHS
è
FALSE
ü Operator
è
“=“
Conditions
Trigger
CompText
= “When the acoustical signals <E> turns to TRUE
every 1 seconds
”
v
Predicate
Ø Relation = turns to
Ø Op1
ü Text = the acoustical signals <E>
Ø Op2
ü Text = TRUE
Ø neg_flag = false
Ø Formal Semantic
ü LHS
è
<E>
ü RHS
è
TRUE
ü Operator
è
“=“
---------------------------------------------------------------------------------------------------------------------
v
In-Between-time
Ø Preposition = “every”
Ø Value= 1
Ø Unit= second
Ø QR = equal
Ø Formal Semantic
ü Operator
è
“=“
ü Value = 1
• G(P ⇒ F(G
t=2
(C1)
∨
(C
2
⌃
C
3
) ⇒ F
t<2
(S))
• G(sailing_termination=TRUE ⇒ F(G
t=2
(X=ON)
∨
(Y=ON
⌃
Z=ON)
⇒ F
t<2
(M=TRUE))
• G(Ft=1(T)) ⇒(F(A) ⇒(F(Q∨A)UA))
• G(Ft=1(<E>=TRUE)) ⇒(F(<B_sig>=TRUE) ⇒
(F(M=FALSE
∨
<B_sig>=TRUE) U <B_sig>=TRUE))
Condition_3
CompText = “If Z is ON”
v Predicate
Ø Relation = is
Ø Op1
ü Text = Z
Ø Op2
ü Text = ON
Ø neg_flag = false
ØFormal Semantic
ü LHS
è
Z
ü RHS
è
ON
ü Operator
è
“=“
And
OR
Condition_2
CompText = “If Y is ON”
v Predicate
ØRelation = is
ØOp1
ü Text = Y
ØOp2
ü Text = ON
Øneg_flag = false
ØFormal Semantic
ü LHS
è
Y
ü RHS
è
ON
ü Operator
è
“=“
Condition_1
CompText = “If X is ON for
1 second ”
v Predicate
ØRelation = is
ØOp1
ü Text = X
ØOp2
ü Text = ON
Øneg_flag = false
ØFormal semantic
ü LHS
è
X
ü RHS
è
ON
ü Operator
è
“=“
--------------------------------
v Valid-time
ØValue= 2
ØUnit= second
ØQR = equal
ØFormal Semantic
ü Operator
è
“=“
ü Vlaue
è
2
P S
C
1
C
2
C
3
A Q
T
Figure 3: An example presents multi-sentence requirement ”REQ” and the corresponding RCM representation.
Table 4: RCM mapping to MTL & CTL.
RCM TL Mapping
Properties (component/ subcomponents) Versions Applicable on MTL CTL
Action 1 A: do something A A
Pre-
condition
Condition 2 If S
Action (P in
mapping)
G(S =⇒ P) AG(S =⇒ P)
Temporal Modality
Trigger 3 When S G(S =⇒ P) AG(S =⇒ P)
Conditions and
triggers
4 When S, IF Q G((S ∧ Q) =⇒ P) AG((S ∧ Q) =⇒ P)
Req-Scope:
(Preconditional-
Scope /
Action-Scope)
StartUP 5 After S
Precondition/
action (P in
mapping)
G(S =⇒ F(P))
AG(S =⇒
AG(AF(P)))
EndUP
6 Before S
F(S) =⇒ (F(P ∨
S)US)
A[((AF(P ∨ S)) ∨
AG(¬S))WS]
7 Until S F(P)U S AF(P)U S
StartUP and
EndUp
8
-After Q & Before S
-Between Q and S
G((Q ∧ ¬S ∧ F (S))
=⇒ F(P ∨ S)US))
AG((Q ∧ ¬S) =⇒
A[((AF(P ∨ S) ∨
AG(¬S))WS])
9
-After Q & Until S
- While Z {Q=Z&
S=¬ Z}
G((Q ∧ ¬S) =⇒
F(PUS))
AG((Q ∧ ¬S) =⇒
A[(AF(P ∨ S)WS])
Pre-elapsed-time
10 After c time Condition/
Action (P in
mapping)
F
t=c
(P)
Time notation
11 after at-most c time F
t≤c
(P)
12 after at-least c time F
t≥c
(P)
13 after less-than c time F
t<c
(P)
14 after greater-than c F
t>c
(P)
Validation-time
15 for c time Condition/
Trigger/ Action
(P in mapping)
G
t=c
(P)
16 for at-most c time G
t≤c
(P)
17 for at-least c time G
t≥c
(P)
18 for less-than c time G
t<c
(P)
19 for greater-than c G
t>c
(P)
In-between-time
20 every c time
Action/ Trigger
(P in mapping)
G(F
t=c
(P))
21 every at-most c time G(F
t≤c
(P))
22 every at-least c time G(F
t≥c
(P))
23
every less-than c
time
G(F
t<c
(P))
24 every greater-than c G(F
t>c
(P))
Hidden-Constraint 25 Whose S P is Any component AG(∃S =⇒ P) branching
MODELSWARD 2021 - 9th International Conference on Model-Driven Engineering and Software Development
116

To demonstrate the robustness of the RCM and ca-
pability to transform to different formal notations, we
provide here a mapping into two examples of tempo-
ral logic, MTL (Alur and Henzinger, 1993) and CTL
(Clarke and Emerson, 2008), as shown in Table 4 as
a proof of multiple map-ability. We chose these no-
tations as they are widely used in model checking
as indicated in (Konur, 2013) and (Haider, 2015) re-
spectively. We base our temporal-modality and time-
notation mapping on the mapping done in (Konrad
and Cheng, 2005).
The first column in Table.4 shows the RCM prop-
erties (components and sub-components) employed in
formal roles, each attached with alternatives if any
(e.g., The pre-conditions may be conditions, triggers,
or both of them based on the given requirement). Pos-
sible structures corresponding to each property ver-
sion are listed in the third column (i.e., the used key-
words (e.g., when) are just examples, any replaceable
keyword could be used). The fourth column indi-
cates which components can be linked to each prop-
erty type. The MTL and CTL representations of each
property are presented in the fifth and sixth columns
respectively, where these notations are grouped based
on their formal types in the last column.
4.3.2 RCM and Formal Semantics
Temporal logic has multiple versions exhibiting slight
differences. In order to support the transformation
to multiple versions with minimal adjustment in the
transformation technique, RCM encapsulates formal
semantics with semi-formal semantics. Design-wise,
RCM augments the formal semantic in the basic units,
predicate and time structures in Figure 2, that are ma-
pable to temporal logic, as indicated in the previous
subsubsection. The formal semantic of a predicate
covers three formats:
• Process Format: is suitable to predicates ex-
press functions or process (e.g., ”the monitor
sends a request REQ Sig to the station” −→
”send(the monitor, the station,REQ Sig)”).
• Relational Format with Plain RHS: the type is
suitable for assignment predicates (e.g., ”set X
to True” −→”X = True”), comparison predicates
(e.g., ”If X exceeds Y” −→”X > Y”) and chang-
ing state predicates (e.g., ”the window shall be
moving up” −→”the window = moving-UP”).
• Relational Format with Aggregated RHS: this
format is similar to the previous one but the RHS
is expressed with aggregating function (e.g., ”If
the fuel level is less than the min value of Thr1 and
Thr2” −→”the fuel level < ”min(Thr1, Thr2)”).
Similarly, the formal semantic is added to time
structure in which the technical time operator (e.g.,
{>, <, =, 6, >}) is identified (e.g., ”for at least 2 sec-
onds” −→ ”t > 2”).
4.3.3 RCM Transformation Algorithm
To accomplish the automatic transformation from
RCM-to-MTL, we use the mapping rules provided
in Table 4 on the obtained formal semantics of the
given primitive requirements. Algo.1 shows the auto-
matic transformation pseudo-code annotated in Fig-
ure 4 with each step output for PR[1] in the REQ Fig-
ure 3.
Algorithm 1: RCM-to-MTL Transformation.
1: Input:
R: RCM-to-MTL indexed Mapping Rules
PrimReq: primitive requirement of interest
2: procedure
3: Step 1: Prepare each component
4: for all comp ∈ PrimReq do
Comp.Formal← Comp.CoreSegment
.getFormalSemantic()
5: for all timeInfo ∈ comp do
Comp.Formal← comp.
AttachTimeSemantic(timeInfo, R{9:25})
6: end for
7: end for
8: Step 2: Aggregate components of the same type
9: for all compTree ∈ CompTypeTree do
aggVal ← aggRel(compTree)
10: procedure AGGREL(Tree compTree)
11: if compTree is leaf then
return compTree.data.Formal;
12: else
return ”(” + aggRel(compTree.Left)
+ compTree.data.LR() +
aggRel(CompTree.Right) ”)”
13: end if
14: end procedure
map.put(compTree.Type, aggVal)
15: end for
16: Step 3: Prepare Preconditions
preConds ← preparePrecond(map[Triggers],
map[Conditions], R{2:4})
17: Step 4: Prepare LHS and RHS
lHS ← prepareSide(preConds, R{5:9})
rHS ← prepareSide(Actions, R{5:9})
18: Step 5: Generate Formulat
19: if lHS 6= φ then
return lHS + ”−→” + rHS
20: else
return rHS
21: end if
22: end procedure
First, we get the formal semantics of each component
according to Subsection.4.3.2. Then, we compute the
RCM: Requirement Capturing Model for Automated Requirements Formalisation
117

Step1:
ü sailing_termination=TRUE
ü G
t=2
(X=ON)
ü Y=ON
ü Z=ON
ü F
t<2
(M=TRUE)
Step2:
ü sailing_termination=TRUE
ü G
t=2
(X=ON) ∨ (Y=ON
⌃
Z=ON)
ü F
t<2
(M=TRUE)
Step3:
ü preConds: G
t=2
(X=ON) ∨
(Y=ON
⌃
Z=ON)
Step4:
ü lHS: G( sailing_termination=TRUE
⇒ F(G
t=2
(X=ON) ∨ (Y=ON
⌃
Z=ON))
ü rHs: F
t<2
(M=TRUE)
Step5:
ü mTLFormula: G(sailing_termination=TRUE ⇒ F(G
t=2
(X=ON) ∨ (Y=ON
⌃
Z=ON) ⇒ F
t<2
(M=TRUE))
Figure 4: Step by Step generation of PR[1] from Figure 3.
formal semantics of the entire tree (i.e., leaf nodes
represent components and inner nodes represent log-
ical relations as discussed before) of each component
type through the recursive function aggRel. After
that, we construct the main parts of the formula (i.e.,
preCondtions, LHS and RHS) in Step3 and 4 with
the help of RCM-to-MTL mapping rules in Table 4.
Finally, we generate the entire formula based on the
bound sides either ”LHS −→ RHS” or ”RHS” as in
Step5.
5 EVALUATION
5.1 Dataset Description
We evaluate the coverage of our proposed RCM on
162 requirement sentences. These requirements were
extracted from existing case studies in the litera-
ture and grouped into three sub datasets as follows:
(1) expressiveness dataset (81 requirements): these
are requirements collected from papers that intro-
duced different requirement templates and formats
in different domains and considering different writ-
ing styles in (Justice, 2013) (Jeannet and Gaucher,
2016)(Thyssen and Hummel, 2013), (Fifarek et al.,
2017), (L
´
ucio et al., 2017a), (Dick et al., 2017),
(Bitsch, 2001), (Teige et al., 2016), (L
´
ucio et al.,
2017b), (Mavin et al., 2009), (R. S. Fuchs, 1996), (2)
formalisation dataset (28 requirements): these are re-
quirements extracted from papers that introduced re-
quirement formalisation techniques including (Ghosh
et al., 2016; Yan et al., 2015) with total of 28 re-
quirements and (3) online sources (43 requirements):
these are requirements extracted from an online avail-
able critical-system requirements including (Houdek,
2013). These requirements are available online in
1
.
Figure 5 presents the percentages of each of
the 19 requirement properties (components/sub-
components) within the entire dataset. The figure
shows that time-based and hidden constraints existed
1
Dataset:https://github.com/ABC-7/RCM-Model/tree/
master/dataSet
in a few requirements compared to the key require-
ment components such as action, trigger, and condi-
tion. Overall, the distribution of the properties is bi-
ased towards the popular properties that exist in most
approaches.
162
16
5
14
86
10
2
44
3
2
9
2
10
2
23
2
27
2
6
1
2
4
8
16
32
64
128
256
A
A-vt
A-rt
A-pt
C
C-vt
C-pt
T
T-vt
T-rt
SP
SP- vt
EP
EP-vt
SA
SA-vt
EA
EA- vt
hidden
frequency
properties
Properties Frequency wihtin the Entire
Requirements
A: action C: condtion T: trigger hidden: Hidden-constraint
SP: pre-cond Startup-phase EP: pre-cond Endup-Phase
SA: action Startup-phase EA: action Endup-phase
vt: valid-time pt: pre-elapsed-time rt: in-between-time
Figure 5: Properties Frequency wihtin the Entire Require-
ments.
Figure 6 shows the relative complexity of the 162 re-
quirements. We grouped the requirements based on
the count of their existing properties (i.e., number of
properties per requirement increases ↑, its complexity
increases ↑). The following examples show two re-
quirements with one and six properties respectively,
where each property is separately underlined: (1) ”the
monitor mode shall be initialized to INIT”, and (2)
”after X becomes TRUE for 2 seconds, when Z turns
to 1 for 1 second, Y shall be set to TRUE every 2 sec-
onds”. In Figure 6, each group represents the count
of properties regardless of the type of the property -
i.e., R1: requirement with condition and action, and
R2: requirement with trigger and action, both have 2
properties). For each group, we calculated the per-
centage of requirements. Figure 6 presents the prop-
erties count used for each requirements group on the
x-axis and the corresponding requirements percent-
age on the y-axis. This shows that a large portion of
the entire requirements sentences 9%, 49% and 22%,
only consist of one, two and three properties respec-
tively. On the other hand, 20% of the requirements
sentences consist of more than three properties.
9%
49%
22%
12% 7% 1%
0%
10%
20%
30%
40%
50%
1 2 3 4 5 6
FREQUENCY RATE
PROPERTIES COUNT/ REQUIREMENT
Figure 6: Frequency rate of Requirements per Properties
Count.
MODELSWARD 2021 - 9th International Conference on Model-Driven Engineering and Software Development
118

5.2 Evaluation Experiments
Experiment1. RCM Expressiveness: We evaluated
our proposed RCM reference model’s ability to cap-
ture and represent the requirements in our test dataset
compared to 15 exiting approaches in Table.3. To do
this, we manually labelled all the requirements in the
dataset against the 19 requirement properties we iden-
tified in section 4. After that, we wrote a script to
check each requirement (identified properties) against
all existing approaches to assess if the approach pro-
vides a boilerplate or a template that supports repre-
senting the requirement or not. The results are avail-
able online
2
. Figure 7 summarises the results of our
analysis as percentage of the test requirements that
each approach supports.
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
A1 A2 A3 A4 A5 A6 A7 A8 A9 A1 0 A1 1 A12 A13 A14 A1 5 A1 6
Percentage of captured requirements
Approache
Percentage of Captured Requirements per Approach
Figure 7: Percentage of Captured Requirements per Ap-
proach (RCM represented by A16 and the other represent
by codes proposed in subsection4.2).
This shows that none of the existing 15 approaches
is able to represent the entire dataset of requirements.
This is mainly for two reasons: (1) missing proper-
ties in the used templates e.g., A1 does not support
StartUp-phase Pre-conditional scope (SP), or (2) re-
strictions on the included properties in a requirement
format e.g., A2:EARS does not support the existence
of the trigger (core-segment) and a ReqScope (core-
segments) using the same format. In addition, ≈4% of
the test requirements were not covered by any of these
approaches combined. An example is ”if the maxi-
mum deceleration is [insufficient] before a collision
with the vehicle ahead, the vehicle warns the driver
by acoustical signals for 1 seconds every 2 seconds”,
where the existing properties are: condition (core-
segment), StatrtUp-phase Pre-conditional scope (SP
core-segment), action (core-segment), action valid-
time (Vt) , and action in-between-time (Rt). These
2
Approaches representations, and evaluation:
https://github.com/ABC-7/RCM-Model/blob/master/
Approaches-Evaluation.xlsx
properties do not exist together in the same represen-
tation of any of the 15 approaches, see Table 3.
In contrast, our proposed RCM requirements
model can represent all of the 162 requirements sen-
tences. This is because it covers all properties that ex-
ist in the other approaches and puts no restriction on
the included properties in one requirement (i.e., any
property could exist in the requirement format).
Existing approaches require extension in two
cases: (1) considering new requirement properties,
and (2) considering new formats i.e, defining a set
of properties that can exist together in one format
regulated by customized grammatical rules. In con-
trast, since RCM covers all properties of the other ap-
proaches and more and puts no constraints on prop-
erties used in requirement, it is powerful enough to
represent all requirements that can be represented by
all the other approaches. It can also be used in other
scenarios not currently supported by any of the 15 ap-
proaches, due to the fact that it does not enforce any
restriction on the input requirement formats.
RCM encounters two main limitations: (1) it is
designed for behavioral requirements of critical sys-
tems, and (2) it requires complex NL-extraction tech-
niques i.e., the current NL-extraction processes prim-
itive requirements expressed in one sentence.
Experiment2: RCM to Formal Notations: We
applied our RCM-to-MTL and RCM-to-CTL trans-
formation rules to the dataset of the 162 requirements.
In this experiment, we used our NLP-approach to ex-
tract RCM from the 162 requirements(out of scope
of this paper). We then manually reviewed all the
extracted RCM models, fixed all the broken RCM
extractions manually. Once we had the full list of
162 RCM models, we applied the automatic RCM-to-
Formal transformation as outlined in Sec.4.3.3. The
full list of RCMs representation and the correspond-
ing automatically generated MTL and CTL formulas
are available online
3
.
We successfully transformed 156 out of the 162
requirement RCM models into MTL notations. The
other 6 requirements were partially correct. These 6
requirements turned out to involve hidden constraints
expressed with ∃ and ∀ properties with a branching
structure that is not supported by MTL, since it is
linear. For example, the requirement ”the cognitive
threshold of a human observer shall be set to a devi-
ation that is less than 5. (Houdek, 2013)” was cor-
rectly represented in RCM, but the generated MTL is
partially correct ”G(the cognitive threshold of a hu-
man observer = the deviation)”. A correct generation
3
RCM-Representation and formal-notation:
https://github.com/ABC-7/RCM-Model/tree/master/
RCM-Auto-Transformation
RCM: Requirement Capturing Model for Automated Requirements Formalisation
119

could be ”AG((∃ deviation<5) =⇒ (the cognitive
threshold of a human observer = deviation))” in CTL.
Similarly, CTL could represent requirements with
hidden constraints correctly, but it provides partial
solutions for requirements with time notation e.g.,
validation-time, pre-elapsed-time and in-between-
time. In total, it is capable of representing 120 re-
quirements correctly and provides partial solutions
42 ones due the inclusion of time notation (e.g., the
requirement ”if air ok signal is low, auto control
mode is terminated within 3 sec” has a partially cor-
rect generated CTL formal ”AG([air ok signal = low]
=⇒ [auto control mode.crrStatus = terminated])”,
but a correct formula could be ”G([air ok signal =
low] =⇒ [Ft=3(auto control mode.crrStatus = ter-
minated)]” in MTL notation).
6 SUMMARY
We introduced a new requirements capturing model -
RCM - for representing safety-critical system require-
ments. RCM defines a wide range of key requirement
elements and attributes that may exist in an input re-
quirement. The model allows for standardising the
textual requirements extraction process and simpli-
fies the transformation rules to convert requirements
to formal notations We compared the coverage of our
RCM model to 15 existing requirements modelling
approaches using 162 diverse requirements. Our re-
sults show that RCM can capture a wider range of
requirements compared to others due to the flexibility
in including/excluding its properties conforming the
input requirement. In addition, we provided a suite
of RCM-to-MTL transformation rules and presented
the corresponding automatically generated MTL rep-
resentation of the evaluation dataset. For our fu-
ture work, we are developing an automated require-
ments extraction technique to populate RCM from
textual requirements in addition to requirements qual-
ity checking and visualising tool of the RCM model.
ACKNOWLEDGEMENTS
Grundy is supported by Australian Research Council
Laureate Fellowship FL190100035.
REFERENCES
Alur, R. and Henzinger, T. A. (1993). Real-time log-
ics: Complexity and expressiveness. Information and
Computation, 104(1):35–77.
Ambriola, V. and Gervasi, V. (1997). Processing natural
language requirements. In Automated Software Engi-
neering, 1997. Proceedings., 12th IEEE International
Conference, pages 36–45. IEEE.
Arora, C., Sabetzadeh, M., Briand, L., Zimmer, F., and
Gnaga, R. (2013). Rubric: A flexible tool for auto-
mated checking of conformance to requirement boil-
erplates. In Proceedings of the 2013 9th Joint Meeting
on Foundations of Software Engineering, pages 599–
602. ACM.
Arora, C., Sabetzadeh, M., Briand, L. C., and Zimmer, F.
(2014). Requirement boilerplates: Transition from
manually-enforced to automatically-verifiable natural
language patterns. In Requirements Patterns (RePa),
2014 IEEE 4th International Workshop on, pages 1–8.
IEEE.
Berger, P., Nellen, J., Katoen, J.-P., Abraham, E., Waez, M.
T. B., and Rambow, T. (2019). Multiple analyses, re-
quirements once: simplifying testing & verification in
automotive model-based development. arXiv preprint
arXiv:1906.07083.
Bitsch, F. (2001). Safety patterns—the key to formal speci-
fication of safety requirements. In International Con-
ference on Computer Safety, Reliability, and Security,
pages 176–189. Springer.
Brunello, A., Montanari, A., and Reynolds, M. (2019).
Synthesis of ltl formulas from natural language texts:
State of the art and research directions. In 26th Inter-
national Symposium on Temporal Representation and
Reasoning (TIME 2019). Schloss Dagstuhl-Leibniz-
Zentrum fuer Informatik.
Buzhinsky, I. (2019). Formalization of natural language re-
quirements into temporal logics: a survey. In 2019
IEEE 17th International Conference on Industrial In-
formatics (INDIN), volume 1, pages 400–406. IEEE.
Clarke, E. M. and Emerson, E. A. (2008). Design and syn-
thesis of synchronization skeletons using branching
time temporal logic. In 25 Years of Model Checking,
pages 196–215. Springer.
Dick, J., Hull, E., and Jackson, K. (2017). Requirements
engineering. Springer.
Dwyer, M. B., Avrunin, G. S., and Corbett, J. C. (1999).
Patterns in property specifications for finite-state veri-
fication. In Proceedings of the 21st international con-
ference on Software engineering, pages 411–420.
Erdem, E. and Yeniterzi, R. (2009). Transforming con-
trolled natural language biomedical queries into an-
swer set programs. In Proceedings of the BioNLP
2009 Workshop, pages 117–124.
Esser, M. and Struss, P. (2007). Obtaining models for
test generation from natural-language-like functional
specifications. In International workshop on princi-
ples of diagnosis, pages 75–82.
Fifarek, A. W., Wagner, L. G., Hoffman, J. A., Rodes, B. D.,
Aiello, M. A., and Davis, J. A. (2017). Spear v2. 0:
Formalized past ltl specification and analysis of re-
quirements. In NASA Formal Methods Symposium,
pages 420–426. Springer.
Fu, R., Bao, X., and Zhao, T. (2017). Generic safety re-
quirements description templates for the embedded
software. In 2017 IEEE 9th International Conference
MODELSWARD 2021 - 9th International Conference on Model-Driven Engineering and Software Development
120

on Communication Software and Networks (ICCSN),
pages 1477–1481. IEEE.
Ghosh, S., Elenius, D., Li, W., Lincoln, P., Shankar, N.,
and Steiner, W. (2016). Arsenal: automatic require-
ments specification extraction from natural language.
In NASA Formal Methods Symposium, pages 41–46.
Springer.
Haider, A. (2015). A survey of model checking tools using
ltl or ctl as temporal logic and generating counterex-
amples.
Holt, A. and Klein, E. (1999). A semantically-derived sub-
set of english for hardware verification. In Proceed-
ings of the 37th annual meeting of the Association for
Computational Linguistics on Computational Linguis-
tics, pages 451–456. Association for Computational
Linguistics.
Houdek, F. (2013). System requirements specification au-
tomotive system cluster(elc and acc). Technical Uni-
versity of Munich.
Jeannet, B. and Gaucher, F. (2016). Debugging embedded
systems requirements with stimulus: an automotive
case-study. In 8th European Congress on Embedded
Real Time Software and Systems (ERTS).
Justice, B. (2013). Natural language specifications for
safety-critical systems. Master’s thesis, Carl von Ossi-
etzky Universit
¨
at.
Kittredge, R. I. (2003). Sublanguages and controlled lan-
guages. In The Oxford Handbook of Computational
Linguistics 2nd edition. Oxford University Press.
Konrad, S. and Cheng, B. H. (2005). Real-time specifica-
tion patterns. In Proceedings of the 27th international
conference on Software engineering, pages 372–381.
ACM.
Konur, S. (2013). A survey on temporal logics for spec-
ifying and verifying real-time systems. Frontiers of
Computer Science, 7(3):370–403.
Kuhn, T. (2014). A survey and classification of con-
trolled natural languages. Computational Linguistics,
40(1):121–170.
L
´
ucio, L., Rahman, S., bin Abid, S., and Mavin, A. (2017a).
Ears-ctrl: Generating controllers for dummies. In
MODELS (Satellite Events), pages 566–570.
L
´
ucio, L., Rahman, S., Cheng, C.-H., and Mavin, A.
(2017b). Just formal enough? automated analysis of
ears requirements. In NASA Formal Methods Sympo-
sium, pages 427–434. Springer.
Macias, B. and Pulman, S. G. (1995). A method for con-
trolling the production of specifications in natural lan-
guage. The Computer Journal, 38(4):310–318.
Marko, N., Leitner, A., Herbst, B., and Wallner, A. (2015).
Combining xtext and oslc for integrated model-based
requirements engineering. In 2015 41st Euromicro
Conference on Software Engineering and Advanced
Applications, pages 143–150. IEEE.
Mavin, A., Wilkinson, P., Harwood, A., and Novak,
M. (2009). Easy approach to requirements syntax
(ears). In Requirements Engineering Conference,
2009. RE’09. 17th IEEE International, pages 317–
322. IEEE.
Michael, J. B., Ong, V. L., and Rowe, N. C. (2001).
Natural-language processing support for developing
policy-governed software systems. In Technology
of Object-Oriented Languages and Systems, 2001.
TOOLS 39. 39th International Conference and Exhi-
bition on, pages 263–274. IEEE.
Nelken, R. and Francez, N. (1996). Automatic translation of
natural language system specifications into temporal
logic. In International Conference on Computer Aided
Verification, pages 360–371. Springer.
Pease, A. and Li, J. (2010). Controlled english to logic
translation. In Theory and Applications of Ontology:
Computer Applications, pages 245–258. Springer.
Qiao, Y., Zhong, K., Wang, H., and Li, X. (2007). Devel-
oping event-condition-action rules in real-time active
database. In Proceedings of the 2007 ACM symposium
on Applied computing, pages 511–516.
R. S. Fuchs, N. E. (1996). Attempto controlled english
(ace). In CLAW 96, First International Workshop on
Controlled Language Applications.
Rolland, C. and Proix, C. (1992). A natural language ap-
proach for requirements engineering. In International
Conference on Advanced Information Systems Engi-
neering, pages 257–277. Springer.
Rupp, C. (2009). Requirements-Engineering und-
Management: professionelle, iterative Anforderungs-
analyse f
¨
ur die Praxis. Hanser Verlag.
Schwitter, R. (2002). English as a formal specification lan-
guage. In Proceedings. 13th International Workshop
on Database and Expert Systems Applications, pages
228–232. IEEE.
Scott, W., Cook, S. C., et al. (2004). A context-free re-
quirements grammar to facilitate automatic assess-
ment. PhD thesis, UniSA.
Sl
´
adekov
´
a, V. (2007). Methods used for requirements engi-
neering. Master’s thesis, Univerzity Komensk
´
eho.
Sturla, G. (2017). A two-phased approach for natural lan-
guage parsing into formal logic. PhD thesis, Mas-
sachusetts Institute of Technology.
Teige, T., Bienm
¨
uller, T., and Holberg, H. J. (2016). Uni-
versal pattern: Formalization, testing, coverage, veri-
fication, and test case generation for safety-critical re-
quirements. pages 6–9. MBMV.
Thyssen, J. and Hummel, B. (2013). Behavioral specifica-
tion of reactive systems using stream-based i/o tables.
Software & Systems Modeling, 12(2):265–283.
Van Kleek, M., Moore, B., Karger, D. R., Andr
´
e, P., and
Schraefel, M. (2010). Atomate it! end-user context-
sensitive automation using heterogeneous information
sources on the web. In Proceedings of the 19th inter-
national conference on World wide web, pages 951–
960.
Yan, R., Cheng, C.-H., and Chai, Y. (2015). Formal con-
sistency checking over specifications in natural lan-
guages. In 2015 Design, Automation & Test in Europe
Conference & Exhibition (DATE), pages 1677–1682.
IEEE.
RCM: Requirement Capturing Model for Automated Requirements Formalisation
121
