
VICA: A Vicarious Cognitive Architecture Environment Model for
Navigation Among Movable Obstacles
Halim Djerroud and Arab Ali-Ch
´
erif
Laboratoire Paragraphe, Universit
´
e Paris VIII, 2 rue de la Libert
´
e 93526 Saint-Denis, France
Keywords:
Navigation Among Movable Obstacles, Cognitive Architecture, Multi-agent System.
Abstract:
This article presents a new Cognitive Architecture Environment model for Navigation Among Movable Obsta-
cles (NAMO). This model is the result of a novel approach based on the Theory of Mind and more particularly
on the notion of ’vicariance’ as an essential strategy of the robot’s interaction with outside world. The im-
plementation of our model follows the advances in AI and the Cognitive Robotics research area, where a
cognitive architecture environment is represented as a Multi-Agent System (MAS). The MAS representation
offers the robot the ability to produce a representation of its environment as well as the possibility to run all
types of action simulations in order to anticipate the environment’s reactions. The environment state values,
both predictive and real as transcribed during simulation and real action movements, are compared to each
other in order to keep the correct ones and avoid errors. This is a continuous learning and leads to the con-
struction of a safe path of actions into a dynamic environment. The experiment results show the efficiency
of our model, offering an intelligent guide to the robot in order to perform tasks among mobile agents, by
avoiding a maximum number of obstacles.
1 INTRODUCTION
In recent years, a lot of research has dealt with the
goal of how making a robot able to efficiently maneu-
ver in a crowded space (Renault et al., 2019), such
as a domestic environment, filled with different types
of agents such as human, robot, or other. We pro-
pose to reach the same goal from a different point of
view: how the environment, which can not be spec-
ified in advance, could offer to the robot the knowl-
edge gained through interactions with it and the other
agents, and their experience of acting in this environ-
ment. The robot has to manage the possible unpre-
dictability of the objects in the environment and its
actual behavior when it executes its plan. Our ap-
proach is based on the theory of mind (Theory of
Mind - ToM), and more particularly the concept of
vicariance as defined by Berthoz (BERTHOZ Alain,
2015). Vicariance is a polysemous term but funda-
mentally the concept is equivalent to the idea of the
potential substitution of one solution or function for
another. According to this idea, it is possible to per-
form the same tasks with different systems, solutions
or behaviours which constitutes the basis for diversity.
In this article we present the concept and imple-
mentation of a vicarious cognitive architecture model
environment for Navigation Among Movable Obsta-
cles (NAMO), named VICA. The contributions are
the following: 1) The robot has the ability to produce
a mental image of its environment; 2) the robot is able
to run simulations in order to anticipate the environ-
ment’s reactions; 3) The robot interacts with the en-
vironment and learns from all the environment state
values during the training states.
In the domain of cognitive architecture and more
specifically in cognitive robotics (Lemaignan et al.,
2011), most architectures are generic and few of them
can truly manage the complexity of interactions be-
tween objects being in the same environment. Nu-
merous applications (Mueggler et al., 2014) are cur-
rently developed for robots that move in an envi-
ronment with movable obstacles, but most research
papers dealing with this problem (Moghaddam and
Masehian, 2016)(Mirabel and Lamiraux, 2016) do not
always make explicit the underlying cognitive archi-
tecture.
Our work is part of the theory of mind, which
is also a branch of the philosophy of mind. We
are strongly inspired by the work of the physiologist
Alain Berthoz (Berthoz, 2008). He describes the brain
as a predictor and action simulator. The brain’s func-
tion is to anticipate future environmental events and
simulate the adequate movement to fulfill a need, this
is the principle of Vicariance. We represent the cogni-
298
Djerroud, H. and Ali-Chérif, A.
VICA: A Vicarious Cognitive Architecture Environment Model for Navigation Among Movable Obstacles.
DOI: 10.5220/0010269602980305
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 2, pages 298-305
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

tive architecture environment model as a MAS system
intelligently reinforced by the continuous simulations
experience acquisition.
2 RELATED WORKS
2.1 Navigation Among Movable
Obstacles (NAMO)
Current work in the domain of NAMO can be divided
into two main categories: offline planning and online
planning.
Offline planning assumes that all information
about the space, in which the robot will move, is
known in advance. Among the research on offline
NAMO, Chen et al. (Chen and Hwang, 1990) first
proposed a grid-based method to represent the envi-
ronment, using both a global and local planner, in or-
der to find a path that leads to a goal. The algorithm is
not optimal because it does not solve a wide variety of
problems. The work of (Okada et al., 2004) presents
a humanoid robot with three sub-groups and plan-
ners, one for each of the following elements: envi-
ronment, movement and manipulation. The algorithm
does not take into account mobile obstacles that indi-
rectly block the path to the goal(Stilman and Kuffner,
2008). Most results on offline NAMO research show
that this approach isn’t effective, it lacks flexibility.
In online planning the robot has only partial
knowledge of its environment, and forces the robot
to modify its original plan based on new information
acquired during its journey. The research of Wu et al.
(Wu et al., 2010) is one of the first to bring the subject
of NAMO in an unknown environment. It presents
an algorithm based on simple assumptions. The al-
gorithm gathers new information during the robot’s
movement, and identifies new data that do not affect
the calculations of the previously established path.
However the local solutions resulting from new infor-
mation on the immediate environment do not solve
all cases. In similar work for NAMO, in an un-
known environment (Wu et al., 2010), the proposed
algorithm turns out to be optimal under certain con-
ditions, but numerous cases still remain insolvable.
Today’s trend of online NAMO seems more promis-
ing and better-suited. The work of (Levihn et al.,
2013) presents a method providing a theoretical deci-
sion solution for action selection for NAMO applied
to a continuous-control robot. The algorithm com-
bines Markov decision-based planners (MDP) as well
as Monte-Carlo simulation. The presented planners
solve some of the problems encountered in specific
NAMO cases, but they never present a generic so-
lution applicable in all cases regard of a vicarience
mind.
2.2 Cognitive Architectures
Research in cognitive architectures for NAMO, show
that these approaches offer flexibility in their way to
generalizing problems. Work in the domain of cogni-
tive architecture is longstanding, and state-of-the-art
examples can be found in (Ye et al., 2018)(Kotseruba
et al., 2016). It falls into three main families: 1) Bio-
inspired cognitive architecture. 2) Cognitive architec-
ture for the solving of artificial intelligence problems.
3) Cognitive architecture based on psychological and
philosophical theories.
2.2.1 Bio-inspired Cognitive Architecture
Has the objective of modelling human behavior, and
has been under continuous development since the late
1970s (Martin et al., 2020) (Remmelzwaal et al.,
2020). Among the best-known, we quote: ACT-R
(Adaptive Control of Thought-Rational) (Anderson,
2019) is organized in a set of modules, each dealing
with a different type of information corresponding to
an equivalent in humans (visual, perception, memory,
manual, etc.). Each module has its own version of
the three memories: Working memory (WM), Declar-
ative memory (DM) and Procedural memory (PM).
Coordination is ensured by a central system. CLAR-
ION (Connectionist Learning with Adaptive Rule In-
duction On-line) (Sun, 2006) is a hybrid architecture
that combines symbolic and connectionist representa-
tions, while developing artificial agents.
2.2.2 Cognitive Architectures for Solving
Artificial Intelligence Problems
These architectures are based on logic programming
and machine learning algorithms. We quote SOAR
(State, Operator And Result) (Laird, 2012) which is
a purely ”symbolic AI” architecture, as well as iCub
(Vernon et al., 2011). ICARUS (Choi and Langley,
2018) is more recent, storing two distinct forms of
concepts. They both imply relations between the ob-
jects and need hierarchical organization of long-term
memory. To the best of our knowledge, there is no im-
plementation of these architectures in robots that act
in real environments.
VICA: A Vicarious Cognitive Architecture Environment Model for Navigation Among Movable Obstacles
299

2.2.3 Cognitive Architectures based on
Philosophical Theory
They are based on philosophical and psychological
theories and deal with problems such as action, per-
ception, reasoning and intentionality. In BDI archi-
tecture (Belief, Desire, Intention) (Rao and Georgeff,
1991) we find the theory where beliefs and desires are
the cause of the intention to act, like in PRS (Proce-
dural Reasoning System) (Wooldridge, 2009) for ra-
tional agents. LIDA (Learning Intelligent Distribu-
tion Agent) (Friedlander and Franklin, 2008) is a cog-
nitive architecture based on Bernard Baars’s Global
Workspace psychological theory (Baars, 2005). It
has a cognitive cycle divided into three phases: com-
prehension, attention and selection of action, and
learning. These phases are repeated indefinitely.
CARMEL (in French - Compr
´
ehension Automa-
tique de R
´
ecits, Apprentissage et Mod
´
elisation des
´
Echanges Langagiers) is an architecture developed by
Grard Sabah (Sabah and Briffault, 1993). In this sys-
tem the agent makes itself a symbolic representation
of the one it will interact with.
Currently, researchers also deal with the Theory of
Mind (ToM) which is itself a branch of the philoso-
phy of mind. Our work follows this vein and is in-
spired by the works of physiologists. (Berthoz and
Debru, 2015) describes the brain as a predictor and
action simulator and the main functions are: anticipa-
tion of future events and simulation of the appropriate
movements in order to respond accordingly. The au-
thor calls this principle Vicariance.
3 PRELIMINARY
Neuroscience has inspired many researches in
robotics, the goal of which is to achieve efficiency like
natural systems such as the brain. We give some ex-
amples like the role of mental simulation of the road
in navigation (Trullier et al., 1997), or how the brain
simulates Newtonian laws and determines the trajec-
tory of objects in space (McIntyre et al., 2001), or how
it simulates the rotation of an object (Wexler et al.,
1998).
(Berthoz, 2017)(Berthoz, 2012)(Berthoz, 2000) pro-
vides a general theory of the brain functioning. In the
principle of Vicariance, the anticipation and simula-
tion of the appropriate movements to fulfill a need.
The simulation of imagining a movement (Wexler
et al., 1998), matches to mentally simulating the
body’s movement in the computational space of the
brain. This mechanism is essential for quick move-
ments; the brain takes all or a part of sensory infor-
mation and process it in order to act. The brain sim-
ulates internally possible actions before choosing and
engaging in one, knowing that in many cases it is not
possible to test multiple actions.
Let us consider a robot using such a system, mov-
ing in a crowded space with movable obstacles. The
robot, facing a dynamic obstacle on a path, must avoid
the obstacle while advancing itself. It considers the
movement of the obstacle to avoid collision when
crossing the obstacle’s path. The function of simu-
lation and prediction is fundamental. The robot plans
the action, while planing the movement at the same
time. Therefore, the system selects what is impor-
tant or pertinent sensory information for this move-
ment. In other words, at every phase of movement, the
brain will pre-select sensory input considered as im-
portant. On the other hand, the system is not limited
to select important sensors only, because it can predict
the state in which the objects should be if the move-
ment is accomplished as they should be. In this article
we propose an implementation based on this hypoth-
esis. To represent the environment (a mental image of
the environment) in terms of data structure, the work
of (Djerroud and Cherif, 2019)(Djerroud and Cherif,
2018) show that MAS are perfectly capable of repre-
senting the environment with its lows and rules. We
seek to reproduce observable environments, in MAS
form, able to modify simulation’s parameters, to un-
derstand its functions, and finally predict the future
state of the system. The cognitive architecture pre-
sented in this article uses MAS, which offers an envi-
ronmental engine with the possibility to create agents
and integrate rules on the fly. MAS is defined as fol-
lows:
MAS =< Agents, Environment,Coupling >
Agents = Agent
1
, ..., Agent
n
Agent
i
=< State
i
, Input
i
, Out put
i
, Process
i
>
Environment =< State
e
, Process
e
>
A MAS is composed of a set of agents, an envi-
ronment and the coupling between them. An agent is
defined as a set of states, inputs, outputs and process.
A state is the set of attributes which define an agent.
Inputs and outputs are sub-sets of states, whose vari-
ables are coupled with the environment. The inputs
and outputs can represent the sensors and performers
of an agent. The process is an autonomous process
executed internally by the agent. The coupling is a
mechanism enabling the linking of agent attributes to
the environment. The environment is defined as fol-
lows:
Environment =< States, Rules, Process >
States =< SharedAttributes, InternalAttributes >
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
300
The environment is considered an active entity. It
has its own process, so it is able to change its state
independently the actions of the agents that evolve
within. It is composed of states, rules and process.
States are the attributes representing the state of the
environment at a given moment. We can distinguish
two types of attributes: shared attributes and internal
attributes. The former is shared with the agents (po-
sition, for example), while the latter is not. Internal
attributes are the internal properties of the environ-
ment, such as size, coefficient of friction in a certain
space, etc.
Rules are the rules that the environment must re-
spect. For example, two agents must not be in the
same place at the same time. Rules are defined as fol-
lows:
rule =< expression ? action1 : action2 >
A rule is represented as an expression. It corre-
sponds to the law that the environment must check.
The actions correspond to the actions to be performed,
depending on whether the rule is respected or not.
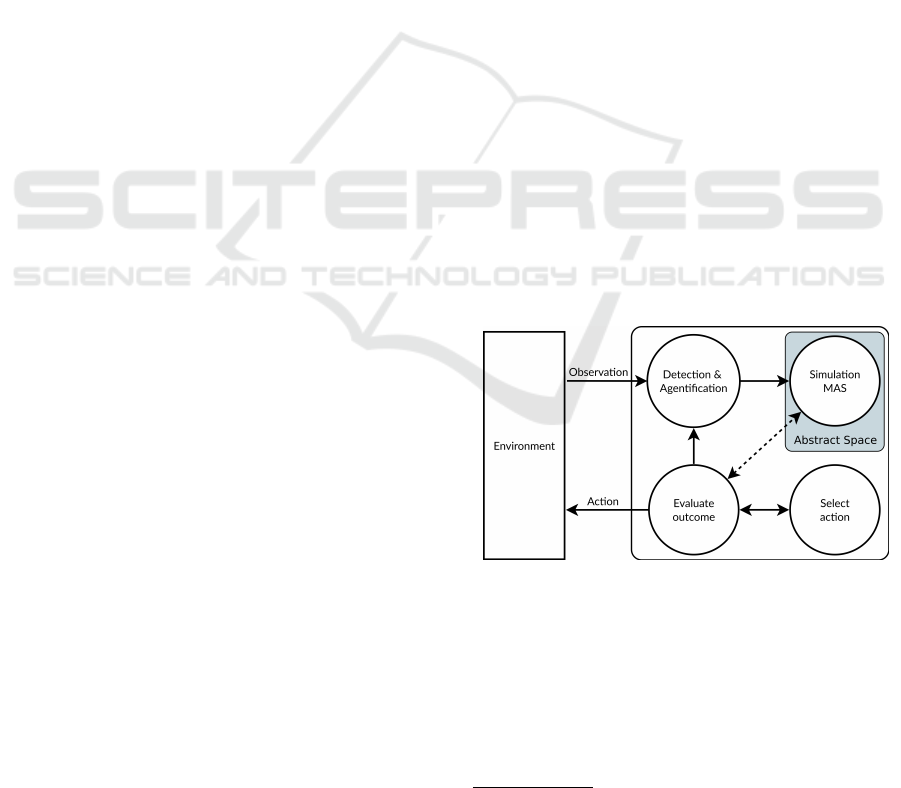
4 VICA ARCHITECTURE:
GLOBAL VIEW
VICA architecture (cf. Fig1) works in a loop. Each
cycle allows: 1) to create an internal representation
of the observed environment, 2) to simulate and ob-
serve the result of these actions, 3) to choose a plan of
actions (among simulated plans of action) and apply
it to the environment. 4) to observe the environment
and evaluate its behavior according to the simulation
(learning).
VICA functions in a deliberative loop, this allows
action simulation plans (an ordered set of actions) and
finally produces only one. VICA has a specificity that
enables independent modules to run in a loop. Each
cycle of execution of each module ends with a de-
liberation and the result is delivered in the form of a
message to other modules. Each loop takes as input
perceptions from the environment, which improve in-
ternal representation of the environment. During the
deliberative loop, the cognitive part of VICA, called
Abstract Space (AS) reproduces the perceptions of the
environment in a MAS (Djerroud and Cherif, 2019)
and represents each perceived entity in the environ-
ment as an agent. Subsequently, each agent is en-
riched with all knowledge already known on this type
of agent; this knowledge concerns particularly the
possible actions on this agent. In the case of the detec-
tion of a box, the system already knows the possible
actions, for example push. In the case of the detec-
tion of a person, the knowing actions are for example
asking to move. For now, the associated actions are
integrated in a database. We plan in the short term
to integrate a module allowing to deduce automati-
cally possible actions on an object, commonly called
affordance (Sun et al., 2014). If the object is not ref-
erenced, the possible actions are not known. The sys-
tem will search for the actions of the nearest object;
in VICA this aspect is called vicariance.
VICA is composed of four modules. Each module
functions independently and in a loop. Modules com-
municate with each other with ACL messages. The
first module Detection and Agentification enables the
observation of the environment and the extraction of
useful information, such as detecting an obstacle. The
second module Abstract Space (AS) can be consid-
ered as a physics engine
1
. It is able to represent en-
tities in the form of agents and apply laws in order
to observe and predict the evolution of entities in the
environment. The sub-module Simulation enables the
construction of a MAS in terms of observation. The
module Evaluate Outcome indicates to MAS the ac-
tion to be simulated, evaluates the results of different
simulations to make a decision, and then applies the
best action. The final module Select Action indicates
how to execute a plan of action in the real environ-
ment.
4.1 Principal Modules of VICA
Architecture
Figure 1: Conception scheme of VICA architecture.
4.1.1 Detection and Agentification
The role of this module is to collect and merge the in-
formation coming from the sensors of the robot and
to express them as agents in the MAS integrated in
the AS. More precisely, the mobile robot is equipped
with several sensors (RGB camera, depth camera, LI-
1
physics engine: software providing an approximate
simulation of real physical systems.
VICA: A Vicarious Cognitive Architecture Environment Model for Navigation Among Movable Obstacles
301

DAR, pressure sensor, etc.). Sensor data is analyzed
to obtain as much information as possible about the
observed scene. An image recognition system is ap-
plied to the RGB camera to determine the type of
object and its shape (box, table, robot, human, etc.),
then the depth camera indicates the dimensions of the
detected objects and finally the LIDAR indicates the
distance between the moving robot and the objects,
as well as between the objects themselves. The sec-
ond role of this module is Agentification which goal
is to present data to AS. When an entity is detected, it
collects as much information as possible about that
entity, sending it to the AS via messages using the
ACL language. Before sending the entities detected
in the scene to the AS module, an object authentica-
tion system adds more information about the possible
actions on these entities. Information is stored auto-
matically to a database, some of it is deduced by a
machine learning algorithm (for example the force to
apply to move an object according to its shape and di-
mensions) or by simple calculations (for example the
volume of a geometric object).
4.1.2 Abstract Space
It enables the construction of an internal representa-
tion of the observed environment. It represents the
current state of the environment in a MAS. Each el-
ement of the environment is represented as an agent.
An agent is therefore considered as an internal repre-
sentation of an object. The first part of this sub-system
is responsible for creating agents. When an object is
detected, the system represents it as an agent. There-
fore, we can identify two cases, either the detected ob-
ject already exists in the AS or it is new, in this case an
agent is created or updated. The MAS created in AS
represents a static image of the environment at a given
moment. The Simulation MAS module offers a set of
services that allow the module Evaluate outcome to
accomplish some tasks. Among the offered services :
a) Simulation: enables launching the simulation of an
action (chosen by the Select Action module) b) Result
simulation: enables consulting the attributes (results)
after simulation. c) Commit / RollBack: will allow
the Evaluate outcome module to launch multiple sim-
ulations and then choose a single action to perform.
Between each simulation, the Evaluate outcome sub-
system must reinitialize the MAS to its initial state
to be ready to perform a new simulation; this is the
main role of the Rollback service. After choosing the
action, the sub-system applies a Commit to validate
this action. The commit re-initializes the MAS to its
last state that corresponds to the environment (before
the simulation) and informs AS of the chosen plan of
action in order to compare the real results obtained
during the last cycle with the simulation ones.
4.1.3 Select Action
This module includes a set of procedures describ-
ing simple actions. Each action represents a robot’s
movement. It is generally used to perform a simple
task, such as moving forward, turning left or right,
pushing an object, and so on. These actions are hard
coded, i.e. the system can not enrich the possible
actions. This module serves as a knowledge base
of robot’s actions; for example the module Evaluate
Outcome wants execute an action such as ”go for-
ward”, then it does not need to know how to do this
action. It need only call a ”go forward” routine, the
details of the implementation of this routine is de-
scribed in this module.
4.1.4 Evaluate Outcome
The objective of this module is to provide a plan of
action. It constructs an oriented and weighted graph
between the current position of the robot and the goal,
the graph is obtained using information from AS. In
VICA implementation, heuristics on the first-level of
the graph correspond to effort (distance + effort if
the robot must push an obstacle). Heuristics on dis-
tance are obtained through the distances provided by
LIDAR and the depth camera, heuristics concerning
the effort needed is obtained by simulation. Heuris-
tics on the other levels correspond to the linear dis-
tance between the node and the goal. Whenever the
robot advances the heuristics on the first level of the
tree are recalculated, and the distances are readjusted
if necessary. The choice of a plan of action is ob-
tained by the A∗ algorithm
2
. The system chooses
a branch to explore and performs simulation to up-
date the heuristics. The process is repeated until all
first-level branches have been explored. This phase
produces a new graph that considers the effort needed
to move the obstacle. The new graph will be used to
determine the path to be taken by A∗. Of course it is
possible to use other path search algorithms, for now
we have only experimented A∗.
2
In our case, we use two heuristics, the estimated cost
to overcome the closest obstacle that hinders the passage,
which is represented by the first level of the graph, and the
distance that separates the robot from the goal, in the rest of
the levels. When the robot advances towards to the goal, the
graph is reduced, so the second level becomes the first and
so on.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
302

5 IMPLEMENTATION AND
EXPERIMENTS
The goal of VICA is to enable the robot to make a
plan and adapt it, if necessary, during its route, to
reach the goal. The plan may involve to a) move ob-
stacles in order to pass, and b) ask another agent (for
example, another person or robot blocking its path) to
let it pass. A first version of VICA was implemented
for a virtual robot in order to evaluate the behaviour
produced. It was tested in a scenario that presented a
cluttered environment including different obstacles of
varying size.
Below, we present an example of simple scenario
describing the robot confronted with an environmen-
tal configuration in which the goal is difficult to reach
without moving the objects in its path (cf Fig 2). (1)
The module responsible for perception observes the
scene and produces a representation in a multi-agent
system (MAS). (2) The module tasked with actions
produces different plans of action in the form of a
graph. (3) All action plans are simulated: push the
cube, push the cylinder or pass between the two. The
robot is equipped with a force sensor. During the sim-
ulation, the force required to move each obstacle is
recorded. After simulation, the heuristics (the force
necessary to move an obstacle) in the graph are up-
dated, and a path is calculated with help from algo-
rithm A*. In the simulation Fig.2, the action plan be-
tween the two objects is identified as the path with the
least resistance. (4) Finally, the chosen plan of action
is applied to the environment.
The graph (cf. Fig.3) shows the possibilities of ac-
tions in the previous environment configuration pre-
sented in Fig.2. Each node can represent an obstacle
that the robot considers able to move, or a path be-
tween two obstacles to reach a position closer to the
goal (G). The robot uses heuristics (H) that obtain via
simulations that will be used to run the A* algorithm.
Figure 2: Example of random configuration.
The Table 1 compares our VICA model with two
other well-known RRT and D* Lite planning meth-
ods. VICA is able to move obstacles, the number of
movements is indicated in the column (Movements).
The execution time of the movement is indicated in
seconds in the (Time) column. The columns (dis-
Figure 3: Generated graph according to the observed envi-
ronment.
tances) indicate the length traveled in centimeters.
The distance between the starting position and the
goal is fixed (350 cm) for all the experiments. Our
method is able to do better than D *, because it is
able to move obstacles and find a better path instead
of avoiding obstacles. The experiments shown here
only involve two types of obstacles (fixed and mov-
able), interactive obstacles (robots, humans, etc.) are
not tested.
VICA models human-like navigation behaviors
when facing obstacles. Often the human brain when
seeking solutions, chooses solutions that require the
least effort. For example, if we wish to pass to the
other side either going around the table, or moving the
chair that hinders the passage, the second solution is
often chosen. The solution proposed by VICA gives
results close to human behavior. The implemented
learning process forces the robot to interact with oth-
ers to learn and increase its ability to respond to sim-
ilar situations. After failing to move unmovable ob-
jects, the robot considers other actions. This process
is similar to natural human behavior.
6 CONCLUSION AND
PERSPECTIVES
In this article, we described VICA, a VIcarious Cog-
nitive Architecture applied to a mobile robot operat-
ing in a crowded environment (NAMO). We produced
a model with MAS representation of the environment,
where the robot is able to inform and understands the
evolution of it, while acting and changing its behavior
appropriately. The assumption of how the environ-
ment could offer to the robot the knowledge gained
through interactions, was confirmed by the results that
show the model’s efficiency. VICA offers an intelli-
gent guide to the robot to perform tasks among mo-
bile agents, by avoiding a maximum number of ob-
stacles while reducing the computation time. This
architecture is further validated by interactions with
more complex objects (eg men, other robots, etc.) and
complex scene configurations to verify that the robot
is able to evolve in a truly complex and natural envi-
VICA: A Vicarious Cognitive Architecture Environment Model for Navigation Among Movable Obstacles
303
Table 1: The results of simulation.
VICA RRT D* Lite
Nbr of obstacles Nbr of movements Travel time (sec) Distance traveled (cm) Distance Distance
5 0 112 370 418 365
10 2 118 388 436 387
20 4 152 385 444 380
30 7 142 358 465 485
40 9 145 390 487 498
50 10 190 378 395 395
60 12 180 397 409 404
70 13 145 395 415 411
80 14 170 412 - -
90 15 186 460 - -
100 15 178 489 - -
ronment. Further work on knowledge representation
is necessary to be compatible with different types of
entities evolving in the environment. The multimodal
perception module will be completed for the extrac-
tion of all the possibilities of actions on an object
(Prospects). Improving the learning module with a
gradually dynamic knowledge would ensure the best
configuration for the goal in any environment.
REFERENCES
Anderson, J. R. (2019). Cognitive architectures including
act-r. Cognitive Studies: Bulletin of the Japanese Cog-
nitive Science Society, 26(3):295–296.
Baars, B. J. (2005). Global workspace theory of conscious-
ness: toward a cognitive neuroscience of human expe-
rience. Progress in brain research, 150:45–53.
Berthoz, A. (2000). The brain’s sense of movement, vol-
ume 10. Harvard University Press.
Berthoz, A. (2008). Neurobiology of” Umwelt”: How Liv-
ing Beings Perceive the World. Springer Science &
Business Media.
Berthoz, A. (2012). Simplexity: Simplifying principles for
a complex world (g. weiss, trans.) cambridge.
Berthoz, A. (2017). The vicarious brain, creator of worlds.
Harvard University Press.
Berthoz, A. and Debru, C. (2015). Anticipation et
pr
´
ediction: du geste au voyage mental. Odile Jacob.
BERTHOZ Alain, T. M.-H. (2015). Towards creative vi-
cariance. Presses Universitaires de Vincennes, Revue
Hybrid, 2:1–6.
Chen, P. C. and Hwang, Y. K. (1990). Practical path plan-
ning among movable obstacles. Technical report, San-
dia National Labs., Albuquerque, NM (USA).
Choi, D. and Langley, P. (2018). Evolution of the icarus
cognitive architecture. Cognitive Systems Research,
48:25–38.
Djerroud, H. and Cherif, A. A. (2018). Visualization tool
for jade platform (jex). In Proceedings of the Future
Technologies Conference, pages 481–489. Springer.
Djerroud, H. and Cherif, A. A. (2019). Environment engine
for situated mas. In ICAART (1), pages 129–137.
Friedlander, D. and Franklin, S. (2008). Lida and a theory
of mind. Frontiers in Artificial Intelligence and Appli-
cations, 171:137.
Kotseruba, I., Gonzalez, O. J. A., and Tsotsos, J. K. (2016).
A review of 40 years of cognitive architecture re-
search: Focus on perception, attention, learning and
applications. arXiv preprint arXiv:1610.08602, pages
1–74.
Laird, J. E. (2012). The Soar cognitive architecture. MIT
press.
Lemaignan, S., Ros, R., Alami, R., and Beetz, M. (2011).
What are you talking about? grounding dialogue in a
perspective-aware robotic architecture. In 2011 RO-
MAN, pages 107–112. IEEE.
Levihn, M., Scholz, J., and Stilman, M. (2013). Planning
with movable obstacles in continuous environments
with uncertain dynamics. In 2013 IEEE International
Conference on Robotics and Automation, pages 3832–
3838. IEEE.
Martin, L., Jaime, K., Ramos, F., and Robles, F. (2020).
Declarative working memory: A bio-inspired cog-
nitive architecture proposal. Cognitive Systems Re-
search.
McIntyre, J., Zago, M., Berthoz, A., and Lacquaniti, F.
(2001). Does the brain model newton’s laws? Na-
ture neuroscience, 4(7):693–694.
Mirabel, J. and Lamiraux, F. (2016). Constraint graphs:
Unifying task and motion planning for navigation and
manipulation among movable obstacles.
Moghaddam, S. K. and Masehian, E. (2016). Planning robot
navigation among movable obstacles (namo) through
a recursive approach. Journal of Intelligent & Robotic
Systems, 83(3-4):603–634.
Mueggler, E., Faessler, M., Fontana, F., and Scaramuzza,
D. (2014). Aerial-guided navigation of a ground
robot among movable obstacles. In 2014 IEEE Inter-
national Symposium on Safety, Security, and Rescue
Robotics (2014), pages 1–8. IEEE.
Okada, K., Haneda, A., Nakai, H., Inaba, M., and Inoue,
H. (2004). Environment manipulation planner for hu-
manoid robots using task graph that generates action
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
304

sequence. In 2004 IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems (IROS)(IEEE
Cat. No. 04CH37566), volume 2, pages 1174–1179.
IEEE.
Rao, A. S. and Georgeff, M. P. (1991). Modeling rational
agents within a bdi-architecture. KR, 91:473–484.
Remmelzwaal, L. A., Mishra, A. K., and Ellis, G. F.
(2020). Brain-inspired distributed cognitive architec-
ture. arXiv preprint arXiv:2005.08603.
Renault, B., Saraydaryan, J., and Simonin, O. (2019). To-
wards s-namo: socially-aware navigation among mov-
able obstacles. In Robot World Cup, pages 241–254.
Springer.
Sabah, G. and Briffault, X. (1993). Caramel: A step towards
reflection in natural language understanding systems.
In Proceedings of 1993 IEEE Conference on Tools
with Al (TAI-93), pages 258–265. IEEE.
Stilman, M. and Kuffner, J. (2008). Planning among mov-
able obstacles with artificial constraints. The Interna-
tional Journal of Robotics Research, 27(11-12):1295–
1307.
Sun, R. (2006). From cognitive modeling to social simu-
lation. Cognition and multi-agent interaction: From
cognitive modeling to social simulation, page 79.
Sun, Y., Ren, S., and Lin, Y. (2014). Object–object inter-
action affordance learning. Robotics and Autonomous
Systems, 62(4):487–496.
Trullier, O., Wiener, S. I., Berthoz, A., and Meyer, J.-A.
(1997). Biologically based artificial navigation sys-
tems: Review and prospects. Progress in neurobiol-
ogy, 51(5):483–544.
Vernon, D., Von Hofsten, C., and Fadiga, L. (2011).
A roadmap for cognitive development in humanoid
robots, volume 11. Springer Science & Business Me-
dia.
Wexler, M., Kosslyn, S. M., and Berthoz, A. (1998). Motor
processes in mental rotation. Cognition, 68(1):77–94.
Wooldridge, M. (2009). An introduction to multiagent sys-
tems. John Wiley & Sons.
Wu, H.-n., Levihn, M., and Stilman, M. (2010). Navigation
among movable obstacles in unknown environments.
In 2010 IEEE/RSJ International Conference on Intel-
ligent Robots and Systems, pages 1433–1438. IEEE.
Ye, P., Wang, T., and Wang, F.-Y. (2018). A survey of cog-
nitive architectures in the past 20 years. IEEE trans-
actions on cybernetics, 48(12):3280–3290.
VICA: A Vicarious Cognitive Architecture Environment Model for Navigation Among Movable Obstacles
305
