
A Deep Q-learning based Path Planning and Navigation System for
Firefighting Environments
Manish Bhattarai
1,2
and Manel Mart
´
ınez-Ram
´
on
1
1
University of New Mexico, Albuquerque, NM, 87106, New Mexico, U.S.A.
2
Los Alamos National Laboratory, Los Alamos, NM, 87544, U.S.A.
Keywords:
Path Planning, Navigation, Firefighting, Decision Making, Reinforcement Learning, Deep Q-learning,
Situational Awareness.
Abstract:
Live fire creates a dynamic, rapidly changing environment that presents a worthy challenge for deep learning
and artificial intelligence methodologies to assist firefighters with scene comprehension in maintaining their
situational awareness, tracking and relay of important features necessary for key decisions as they tackle these
catastrophic events. We propose a deep Q-learning based agent who is immune to stress induced disorientation
and anxiety and thus able to make clear decisions for firefighter navigation based on the observed and stored
facts in live fire environments. As a proof of concept, we imitate structural fire in a gaming engine called
Unreal Engine which enables the interaction of the agent with the environment. The agent is trained with
a deep Q-learning algorithm based on a set of rewards and penalties as per its actions on the environment.
We exploit experience replay to accelerate the learning process and augment the learning of the agent with
human-derived experiences. The agent trained under this deep Q-learning approach outperforms agents trained
through alternative path planning systems and demonstrates this methodology as a promising foundation on
which to build a path planning navigation assistant. This assistant is capable of safely guiding firefighters
through live-fire environments in fireground navigation activities that range from exploration to personnel
rescue.
1 INTRODUCTION
Near-zero visibility, unknown hallways, deadly heat
and flame, and people in dire need. These are the chal-
lenges firefighters face with every structure fire they
respond to. Firefighters endure both extreme external
conditions and the internal hazards of stress, panic,
and disorientation as part of their daily job. Their cen-
tral weapon against both internal and external hazards
is their training on maintenance of situational aware-
ness or understanding of the activities, and circum-
stances occurring in ones immediate vicinity. Main-
taining situational awareness is key to a firefighters
quick and apt response to an ever-changing environ-
ment and is critical to accurate decision-making. Sit-
uational awareness can be heavily impacted by both
external hazards related to fire, and the corresponding
internal stresses experienced by first responders. Loss
of situational awareness is one of the main causes
in the loss of life of firefighters on scene. Firefight-
ers must make prompt decisions in high-stress envi-
ronments, constantly assessing the situation, planning
their next set of actions, and coordinating with other
colleagues, often with an incomplete picture of the sit-
uation. Situational awareness is the foundation of fur-
ther decisions on how to coordinate both rescue oper-
ations and fire suppression. Firefighters on-scene pass
their scene interpretations on via portable radio de-
vices to field commanders for further assistance in de-
cision making and the passing along of an inaccurate
understanding of current conditions can prove disas-
trous. The limitation of this decision-making system
is well reflected in the annual statistics by the US Fire
Administration on the loss of human life
1
. Existing
fire fighting protocols present an excellent use case
for institution of state-of-the-art communication and
information technologies to improve search, rescue,
and fire suppression activities through improved uti-
lization of the data already being collected on-scene.
Firefighters often carry various sensors in their
equipment, including a thermal camera, gas sensors,
and a microphone to assist in maintaining their situ-
ational awareness but this data currently is used only
1
Firefighter Fatalities in the United States in 2017
Bhattarai, M. and Martínez-Ramón, M.
A Deep Q-learning based Path Planning and Navigation System for Firefighting Environments.
DOI: 10.5220/0010267102670277
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 2, pages 267-277
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
267

in real-time by the firefighter holding the instruments.
Such data holds great potential for improving the ca-
pability of the fire teams on the ground if the data
produced by these devices could be processed with
relevant information extracted and returned to all on
scene first responders quickly, efficiently and in real-
time in the form of an augmented situational aware-
ness. The loss of situational awareness is at the core
of disorientation and poor decision making. Advance-
ment in computing technologies, small, cheap, wear-
able sensors paired with wireless networks combined
with advanced computing methodologies such as ma-
chine learning (ML) algorithms that can perform all
data processing and predicting utilizing mobile com-
puting devices makes it not only possible, but quite
feasible to create AI systems that can assist firefight-
ers in understanding their surroundings to combat
such disorientation and its consequences. This re-
search presents a theoretical approach that can serve
as the backbone upon which such an AI system can be
built by demonstrating the power of deep Q-learning
in building a path planning and navigation assistant
capable of tracking scene changes and offering fire-
fighters alternative routes in dynamically changing
fire environments.
AI planning is a paradigm that specializes in de-
sign algorithms to solve planning problems. This is
accomplished by finding a sequence of actions and
addressing the needs and constraints to drive an agent
from a specified initial state to a final state satisfying
several specified goals. We utilize these paradigms
to build a framework that teaches the agent about
fire avoidance and deploys a decision process reactive
enough to successfully guide the agent through simu-
lated spaces that are as dynamic as those encountered
in live fire events. Training in a simulated environ-
ment allows us the ability to test a multitude of situ-
ations and train the agent for exposure to a vast num-
ber of scenarios that would otherwise be impossible
in real life. As a result, we get a vastly experienced
pilot capable of presenting quick recommendations to
a wide variety of situations. The presentation of this
technology is meant to serve as the basis upon which
to build a navigation assistant in future work.
2 PRELIMINARIES
The work in this paper is based on two distinct fields
which are 1) path planning and navigation and 2) deep
reinforcement learning.
2.1 Path Planning and Navigation
A large amount of work focused on path planning and
navigation to aid firefighting has been done, but few
works address dynamic, continuously changing en-
vironments. (Su and Su, 2012) proposes a mobile
robot with various sensors to detect fire sources and
use the so called A* search algorithm for rescue. An
algorithm based on fire simulation to plan safe trajec-
tories for an unmanned aerial system in a simulator
environment is presented in (Beachly et al., 2018).
(Jarvis and Marzouqi, 2005) shows the efficacy of
the covert robotic algorithmic tool for robot naviga-
tion in high-risk fire environments. The usage of an
ant colony optimization tool to automatically find the
safest escape routes in an emergency situation in a
simulator environment is shown in (Goodwin et al.,
2015) whereas (Zhang, 2020) formulates the naviga-
tion problem as a ”Traveling Salesman” problem and
proposes a greedy-algorithm-based route planner to
find the safest route to aid firefighters in navigation.
(Ranaweera et al., 2018) proposes a particle swarm
optimization for shortest path planning for firefight-
ing robots, whereas (Zhang et al., 2018) proposes ap-
proximate dynamic programming to learn the terrain
environment and generate the motion policy for op-
timal path planning for UAV in forest fire scenarios.
A methodology for path reconstruction based on the
analysis of thermal image sequences is demonstrated
in (Vadlamani et al., 2020) which is based on the es-
timation of camera movement through estimation of
the relative orientation with SIFT and Optical flow.
Despite the large quantity of work in the litera-
ture to aid the firefighters in path planning and navi-
gation, most tend to solve the path planning consider-
ing a static environment where a one-time decision
is made to guide the agent from source to destina-
tion. Such algorithms fail when the environment is
dynamic. Furthermore, these algorithms do not al-
low for the agent to take immediate decisions when
encountered with a sudden fire in the path of the cho-
sen navigation path. We propose a deep reinforce-
ment learning-based agent that is capable of taking an
instantaneous decision based on learned experiences
when subjected to sudden environment changes dur-
ing navigation.
2.2 Deep Reinforcement Learning
Reinforcement learning (RL) is a technique that tends
to learn an optimal policy by choosing actions based
on maximizing the sum of expected rewards. Even
though several works exist for path planning in fire
environments, no RL based path planning implemen-
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
268

tations were found for fire scenarios. Outside of the
fire scenario, several RL based path planning imple-
mentations do exist. (Romero-Mart
´
ı et al., 2016)
demonstrates an RL based navigation of a robot which
is provided with a topological map.(Li et al., 2006)
uses a Q-learning based path planning for an au-
tonomous mobile robot for dynamic obstacle avoid-
ance. An RL based complex motion planning for an
industrial robot is presented in (Meyes et al., 2017).
RL integrated with deep learning has demonstrated
phenomenal breakthroughs that are able to surpass
human-level intelligence for computer games such as
Atari 2600 games (Mnih et al., 2013) (Mnih et al.,
2015), AlphaGo zero (Silver et al., 2017) (Tang et al.,
2017) along with various other games. In these frame-
works, the AI agent was trained by receiving only the
snapshots of the game and game score as inputs. Deep
RL (DRL) has also been used for autonomous nav-
igation based on inputs of visual information (Sur-
mann et al., 2020) (Kiran et al., 2020). (Bae et al.,
2019) proposes a multi-robot path planning algorithm
based on deep Q-learning whereas (Lei et al., 2018)
demonstrates the autonomous navigation of a robot
in a complex environment via path planning based
on deep Q-learning(DQL) with SLAM. Most of these
deep reinforcement learning-based path planning and
navigation tasks are based on visual input i.e raw im-
ages/depth data which encodes the information about
the environment. Based on this information, the nav-
igation agents can establish the relationship between
action and the environment. The agent in the DRL
system embeds the action-policy map in the modal
parameters of the neural nets.
Despite the efficacy of the DRL system in nav-
igation, they are based on a learning experience of
trial and error where the agent goes through numer-
ous failures before actual success. Considering the
hazardous behavior of the fire-environments, training,
and evaluation of such DRL systems is very danger-
ous and practically infeasible. In addition to that, it
is very expensive as well as time-consuming. To ad-
dress these challenges, we developed the training en-
vironment for the RL agent in a virtual gaming envi-
ronment Unreal Engine. The virtual environment de-
picts the actual firefighting scenario and enables the
user to collect a large number of visual observations
for action and reaction in various fire environments.
The agent can interact with the environment through
the actions and can also be trained with various user-
defined rewards and goals. The framework also al-
lows a plug and play option for the firefighting envi-
ronment where one can depict a variety of fire sce-
narios from structural fire to wildfires for training the
DRL agent.
In this paper, we introduce a DRL approach to
train a virtual agent in a simulated fire environment.
Taking advantage of simulation, we are able to expose
our agent to a vast number of scenarios and dynamics
that would be cost as well as safety prohibitive in real
life but the results of the training can be applied to real
life fire events. The resulting algorithm can be used in
conjunction with other deep learning/machine learn-
ing approaches to produce a robust navigation assis-
tant that can operate in real-time, effectively guiding
fire fighters through a fire scene and aid their deci-
sion making by supplementing information gaps and
situational awareness lags through the correct inter-
pretation of the scenes they have passed and/or are
currently in.
3 RL PROBLEM DESCRIPTION
AND RL ARCHITECTURE
The virtual environment is achieved in a gaming plat-
form Unreal Engine(Qiu and Yuille, 2016) depict-
ing a fire scenario of burning objects and smoke.
The gaming engine uses computational fluid dynam-
ics (CFD)(Anderson and Wendt, 1995) based physics
models to simulate a real-life dynamic situation where
the parameters are a function of time. This gaming
environment allows an external interaction where the
agent can navigate in the scene via external controls
such as a keyboard or head movement in a Virtual re-
ality(VR) device. We take advantage of an interface
software AirSim (Shah et al., 2018) that allows com-
munication to and from the gaming environment to
a deep learning framework (Tensorflow (Abadi et al.,
2016)). AirSim can grab various parameters from the
gaming environment such as RGB feed, Infrared feed,
depth, and semantic map information corresponding
to the scene and provides the feed to the python block.
The python block then processes this information and
dictates an agent’s movement such as move forward,
move backward, turn right, turn left, jump based on
the deep reinforcement learning(RL) algorithm, and
passes to the AirSim. AirSim further provides these
control commands to the Unreal Engine environment
which emulates these motions. We deploy a deep
Q-learning agent that is trained on a policy-reward
mechanism along with experience replay. For the ex-
perience replay, in addition to storing agent self play,
we also recorded the user interactions with the en-
vironment where they were asked to safely navigate
the environment, avoiding the fire and reaching the
target in the given scene. With each new start, the
user is asked to take different routes with the virtual
agent to reach the destination while avoiding fire and
A Deep Q-learning based Path Planning and Navigation System for Firefighting Environments
269
Actions
Observations
Jump
Front
Left
Right
Experience
Parameters
Parameters
Parameters
Sample
Experiences
Figure 1: Deep Q-Network implementation.
the video frames and controls are recorded. During
the training of RL agent, the sequence of frames and
controls from the experience replay memory are pro-
vided to accelerate the training process and make the
non-differentiable optimization problem converge in
a reasonable time with better accuracy. The knowl-
edge gained by the virtual agent on how to success-
fully navigate the virtual scene can then be transferred
to a cyber-human system that can use this knowledge
to interpret a real scene and provide step-by-step di-
rections to firefighters to assist them in avoiding fire
or other dangerous obstructions. The overview of the
proposed DQN is shown in Figure 1.
Now, we define our objectives and various param-
eters associated with the proposed DRL framework.
3.1 Objective
The goal of the proposed deep Q-learning based agent
is to reach the destination while safely navigating the
fire in a dynamic environment. Safe navigation is
defined as avoiding any contact with simulated fire.
During the test, the agent needs to be prepared to
make instantaneous decisions in instances where fire
appears unexpectedly in the chosen navigation path.
To achieve the best decisions under such situations,
the agents can be subjected to many worst case situa-
tions during the training phase. The rewards need to
be defined precisely to handle such task-driven learn-
ing.
3.2 Observations
The observations for the Q-learning framework are
collected through the agent’s field of view(FOV) from
the virtual simulation environment (i.e Unreal En-
gine) using the AirSim app. The observations are re-
ceived by the Python deep learning environment in the
form of various feeds which include RGB, infrared,
depth, and semantic map frames. Out of these, we
are particularly interested in the infrared frames as
the CNN framework is developed to perform recog-
nition on thermal imagery. This CNN framework is
based on (Bhattarai and Mart
´
ıNez-Ram
´
on, 2020). In
real life scenarios, infrared cameras are the only feed
type which can withstand extreme fire and smoke sit-
uations and improve visibility in heavy smoke. The
virtual environment is also able to provide informa-
tion about the camera position and the agent position,
which will be helpful to locate the agent in the given
3D environment.
3.3 Actions
For ease of implementation and demonstration of
proof of concept, we have transformed the action
space from continuous to discrete space which com-
prises five primary agent motions. This discretization
of the agent space also helps to reduce the model com-
plexity. The five actions are move front, move back,
turn left, turn right, and jump. With these motions, the
agent can navigate in a structural building containing
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
270

obstacles like ladders and furniture. The same set of
motions also enables the agent to navigate in wild-
fire scenarios. The agent may take one or a combina-
tion of these actions to navigate along the fire scene
to reach the destination.
3.4 Rewards
It is very important to define the direction of the goal
while training an RL agent. To achieve a task-driven
learning objective, it is vital to define the rewards to
the navigating agent. The ultimate goal is to find a
safe and minimal trajectory length to the navigation
target. Unlike the trivial objective of finding the mini-
mal trajectory length, the additional constraint of find-
ing the safe path makes the optimization algorithm
more complex. This results in a time-varying deci-
sion system whose instantaneous decisions are based
on contemporary information of the environment. We
introduce a reward and a penalty for familiarizing the
agent to the fire environment. The fire has a penalty
of -10 and a reward for reaching the goal is 10.
3.5 Problem Statement
The RL agent tends to pivot the actions in the direc-
tion of maximizing the rewards. The DRL system
optimizes the hyperparameters of the Q-neural net-
work to encode the experience of the agent for nav-
igation. The backbone deep network aids the naviga-
tion by detection of the objects of interest for naviga-
tion. This information is then fed to the Q-network
which then chooses the optimal actions to guide the
agent. The idea of a DRL system is to provide an end
to end learning framework for transforming the pixel
information into actions (Mnih et al., 2015). Most
of the DRL systems aim to learn the parameters for
the neural network to find a transformation from state
representations s to policy π(s). Also, it is desirable
to have an agent that can learn the navigation from
a single environment and can generalize the experi-
ence to various environments. To achieve that, the aim
is to learn a stochastic policy function π, which can
process a representation of current state s
i
and target
state s
t
to produce a probability distribution over ac-
tion space π(s
i
, s
t
). During the test, the agent samples
an action from this distribution until it can achieve the
destination. To summarize, the objective function that
is used to assess the model performance is given in the
form
z = g(x; θ) = g(x; β(θ); θ) (1)
where g is the navigation problem, which can be
defined as finding the optimal actions with a DQN
whose parameters θ and β are the parameters of the
navigation agent and x is the observation. z describes
the navigation where a given fitness function J(z) is
applied to it in order to measure the optimality of the
estimated decisions for navigation. For a given fixed
set of neural net parameters β, the optimizer tends
to seek optimal θ that determines the actions for the
agent.
3.6 Model
The emphasis of this work is to find an optimal policy
that can aid a firefighter to navigate in a fire setting via
deep reinforcement learning. A deep neural network
is trained for a non-linear approximation of the policy
function π, where action a at time t is sampled as :
a ∼ π(s
i
, s
t
|β) (2)
where β corresponds to NN model parameters, s
i
is
the current observation frame, s
t
is the target obser-
vation to which navigation is to be performed with
action sequence a. Here, s
t
belongs to a discrete set,
π is a distribution function. The target scene can com-
prise fire victims which need help for rescue. So, once
the deep learning (DL) model estimates the target to
be rescued, the RL agent tends to propose navigation
paths that successfully rescue the victim.
3.7 Q-learning and Deep Q-learning
We employ a variant of Q-learning called Deep Q-
learning (DQL)(Mnih et al., 2013) to train an agent
for navigating the fire to reach the destination safely.
In this section, we briefly give an overview of the Q-
learning and Deep Q-learning algorithms.
Q-learning learns the action-value function Q(s, a)
to quantify the effectiveness of taking an action at a
particular state. Q is called the action-value function
(or Q-value function ). In Q-learning, a lookup ta-
ble/memory table Q[s, a] is constructed during train-
ing to store Q-values for all possible combinations of
states s and actions a. An action is sampled from the
current state, followed by computation of reward R (if
any) and then the new state s. From the memory table,
the next action a is determined based on the maximum
of Q(s, a). After this, an action a is performed to seek
a reward of R. Based on this one-step look ahead, the
target Q(s, a) is set to
target = R(s, a, s
0
) + γmax
a
0
Q
k
(s
0
, a
0
) (3)
, where k corresponds to an episode. The update equa-
tions are called Bellman equations (Bellman, 1966)
and are performed iteratively with dynamic program-
ming. As this update is performed iteratively until
convergence, a running average for Q is maintained.
A Deep Q-learning based Path Planning and Navigation System for Firefighting Environments
271

Algorithm 1: Deep Q-learning algorithm for path planning
agent.
1: Initialize replay memory R to capacity N.
2: Initialize the Q-function Q(s, a) for all s,a with
random weights.
3: for k in 1,2,.. M do each execution sequence,
where k corresponds to an episode
4: Initialize sequence s
1
= x
1
5: for t in 1,2..T do decision epoch
6: With probability ε, select a random ac-
tion, otherwise select a
t
= max
a
Q
∗
(s, a;β)
Exploration vs Exploitation Step
7: Action a
t
is performed by agent in the
environment and corresponding rewards r
t
and
scene x
t+1
is observed.
8: Set s
t+1
= s
t
, a
t
, x
t+1
9: Store s
t+1
in R .
10: Sample a batch of transitions e
k
=
(x
k
, a
k
, r
k
, x
k+1
) from R .
11: if x
t+1
is terminal then
12: y
k
= r
k
13: else
14: y
k
= r
k
+ γmax
a
0
Q(s
k+1
, a
0
;β)
15: end if
16: Compute loss (y
k
− Q(s
k
, a
k
;β
k
))
2
and
then update neural net parameters β with gradi-
ent descent and back-propagation as per equa-
tions 4,5 and 6 .
17: end for
18:
19: end for
However, for solving a real-world problem such as
path planning and navigation, where the combinations
of states and actions are too large, the memory and the
computational requirements for Q is very expensive
and intractable in some cases. To address that issue, a
deep Q-network (DQN) framework was introduced to
approximate Q(s, a) with the aid of neural network pa-
rameters. The associated learning algorithm is called
Deep Q-learning. Based on this approach. we can ap-
proximate the Q-value function with the neural net-
work rather than constructing a memory table for Q-
function for state and actions.
An RL system needs to know the current state and
actions to compute the Q-function. However, for our
proposed simulation environment, the internal state
information is not available. In one way, the state
information can be constructed based on a recogni-
tion system that can identify the object of interest in
the scene resulting in a discretization of the observa-
tion space by assigning pixels discrete values based
on their identity. This objective is out of the scope of
this paper and will be pursued in the future. For this
implementation, we only focus on observing a frame
x
t
from the emulator, which is a grayscale infrared
image. Based on the action performed in the envi-
ronment, the agent receives a reward r
t
, along with a
change in the internal state of the environment. Since
we have defined a finite reward/penalty corresponding
to specific states, the agent might need to go through a
series of actions before observing any reward/penalty.
To estimate the Q-function, we consider the se-
quence of actions and observations for a game play
episode. It is given as s
t
= x
1
, a
1
, x
2
, a
2
, ..a
t−1
, x
t
.
Considering t is a finite time where the game termi-
nates either by reaching the target or getting burnt in
a fire, this sequence can be formulated as a markov
decision process (MDP). The goal of the agent is
to choose the action that maximizes the sum of fu-
ture rewards where the reward at time t is given as
R
t
=
∑
T
t
1
=t
γ
t
1
−t
r
t
1
for T being episode time. We
then use a Q
∗
(s, a) as optimal action-value func-
tion for a given sequence s and action a where
Q
∗
(s, a) = max
π
E[R
t
|s
t
= s, a
t
= a, π], π being the dis-
tribution over actions. To estimate this Q
∗
(s, a), we
use the deep neural network (Q-network) of param-
eters β as a non-linear function approximator in the
form Q(s, a;β) where it is expected that Q(s, a; β) ≈
Q
∗
(s, a). This network is trained with an objective
of minimizing a sequence of loss functions L
k
(β
k
)
where,
L
k
(β
k
) = E
s,a∼ψ(.)
[(y
k
− Q(s, a;β
k
))
2
], (4)
Where y
k
= E
s
[r + γmax
a
Q(s, a;β
k−1
)|s, a] is the
target for iteration k and ψ(.) is the probability distri-
bution of sequences s and actions a.
The neural net then back-propagates the gradient
given as
∇
β
k
L
i
(β
k
) = E
s,a∼ψ(.)
h
r + γmax
a
Q(s, a;β
k−1
)
−Q(s, a;β
k
)
∇
β
k
Q(s, a;β
k
)
i
(5)
The parameters of the neural network are updated
as
β
k+1
= β
k
− α∇
β
k
L
i
(β
k
) (6)
where α is the learning rate of the neural network.
Furthermore, a technique called experience replay
(Mnih et al., 2013) is used to improve convergence.
This occurs through exposing the model to human-
controlled navigation and decision making. To imple-
ment experience replay, the agent’s experience e
t
=
(s
t
, a
t
, r
t
, s
t+1
) at each time step t is stored, where s
t
is the current state, a
t
is the action, r
t
is the reward,
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
272

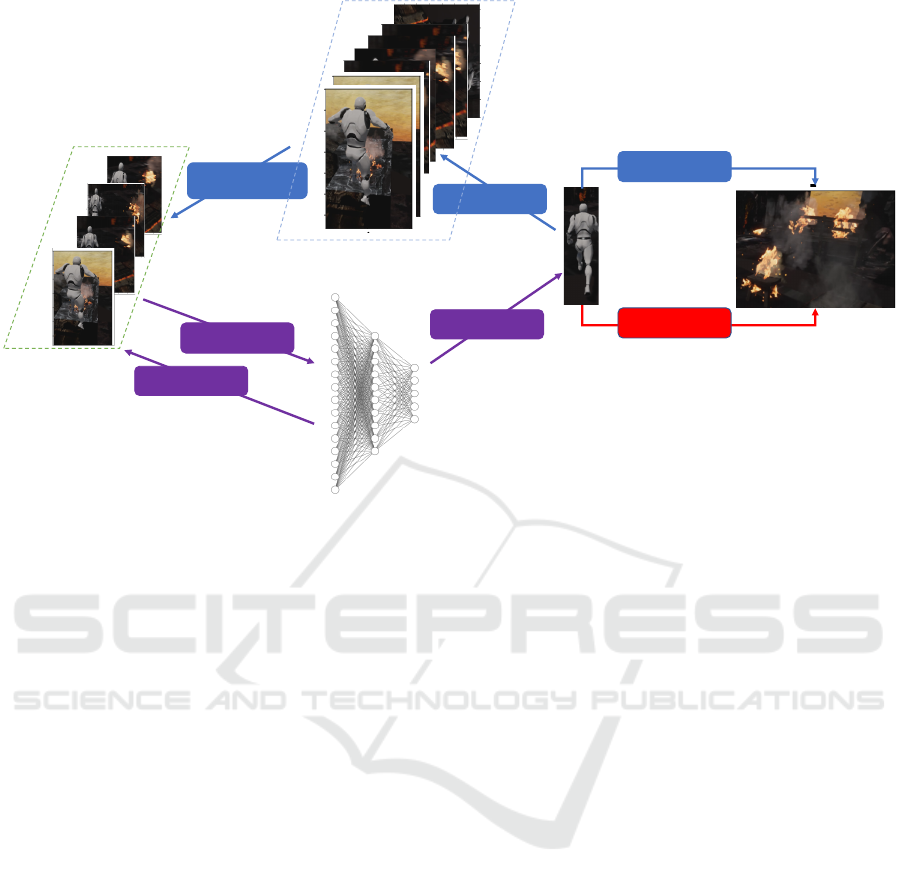
Figure 2: Architecture of Path Planning and Navigation system.
s
t+1
is the next state on taking action a
t
. The expe-
rience calculations presented result from the human-
controlled navigation training and interaction with the
environment. Based on the human interaction, var-
ious episodes {e
i
}
N
i=1
are then stored in a memory
buffer M. During the inner loop Q-learning updates,
a sample of experiences are drawn randomly from the
memory buffer M. The agent then selects and exe-
cutes an action based on an ε−greedy policy. The ap-
proach of sampling randomly from experience replay
enables the agent to learn more rapidly via improved
exposure to reactions to different environmental con-
ditions during an episode of training and allows the
model parameters to be updated based on diverse and
less correlated state-action data. The algorithm corre-
sponding to the deep Q-learning is presented in Algo-
rithm 1 and implementation methodology is presented
in Figure 1.
3.8 Network Architecture
The DQN framework is built on top of a VGG-
net-like framework (Bhattarai and Mart
´
ıNez-Ram
´
on,
2020) as a backbone and is shown in Figure 2. The
backbone framework is used as a feature extrac-
tor that produces 4096-d features on a 224x224 in-
frared/thermal image. The VGG framework is frozen
during the training. A stack of 4 history frames are
used as state inputs to account for the past sequence
of actions of the agent. Then the concatenated fea-
ture set comprising 4 × 4096 is projected into a 512-d
embedding space. This vector is then passed through
a fully-connected layer producing 5 policy outputs
which give the probability over actions and value out-
put.
4 EXPERIMENTAL RESULTS
The implementation of the DQN model was done in
Tensorflow (Abadi et al., 2016) on a dual NVIDIA
GeForce 1080Ti GPU. The DQN framework is
trained with an RMSProp optimizer (Tieleman and
Hinton, 2012) with a learning rate of 10
−4
and batch
size of 32. The training was performed with ε−
greedy with ε started at 1 and decayed to 0.1 over
5,000 frames. The training afterwards was continued
with ε of 0.1. The whole training was performed with
as many as 100,000 frames with a replay memory of
20,000 frames.
While training, the gradients are back-propagated
from the Q-layer outputs back to lower-level layers
while the backbone model is frozen. The navigation
performance was measured by the agent’s ability to
reach 100 different targets set in a given fire envi-
ronment. The target was placed at various locations
in the virtual building on different floors where the
agent needed to navigate using a combination of all
actions. The actions of the agent in successful navi-
gation are shown in Figure 3. The images correspond
A Deep Q-learning based Path Planning and Navigation System for Firefighting Environments
273

Figure 3: Demonstration Of agent actions in fire Environment as dictated By reinforcement learning algorithm. Four
primary actions demonstrated respectively are turning left, right, jump, and moving forward. This enables the agent to avoid
fire and obstacles and safely reach a given destination.
to the agent’s action of move forward, turn left, turn
right and jump. It is complicated to report the aver-
age trajectory length due to the constant changes oc-
curring along the virtual path. In this simulation, the
agent needs to avoid fire, and the trade-off for that is
time. Imposing a time constraint and weighing the
reinforcement model for rewarding or penalizing ac-
cording to both strictures is a goal for future work. To
prove the efficacy of the proposed method’s learning,
we worsen the situation by adding more fire occur-
rence. The fire volume per scene was increased from
10% to 80%, adding fire at random locations. The
shortest path planning strategy failed to reach the des-
tination for fire percentage 30%, and our proposed al-
gorithm was able to navigate to the destination for the
fire percentage as high as 76%. The agent was consis-
tently able to navigate to the destination with a narrow
escape. For extreme fire conditions, we carefully in-
creased the rewards and defined additional penalties
(distance to fire) to better the agent’s learning condi-
tion. The deep Q-learning agent can only be trained
under certain fire conditions, and it can exploit that
knowledge to navigate under different fire conditions.
For example, in this setup, the agent was trained for a
fire percentage of 40%, and it was able to navigate for
a fire percentage of as high as 76%.
The main goal of the proposed algorithm is to
find the least number of combinations of actions that
helps the agent to navigate from the current position
to the destination while avoiding fire. Due to the dy-
namic nature of the environment, when we attempted
to solve this problem with other path planning tech-
niques including shortest path technique, breadth-
first search(BFS) (Beamer et al., 2012), depth-first
search(DFS) (Tarjan, 1972), A*(LaValle, 2006) and
random walk(Spitzer, 2013), the probability of the
agent reaching the destination was very low (less then
5%) under the simulation environment. Since these
methods use a single shot decision map to navigate
the agent to the destination, the agent was unable to
quickly adapt to the continuously varying surround-
ings. When the agent encountered fire which was not
present before the decision, the agent failed to reach
the target in most of the cases. In contrast, the agent
governed by our proposed method was able to reach
the destination with a probability greater then 80%.
During the evaluation of the agent’s navigation
performance with different path planning algorithms,
including the proposed, we observed that a random
initialization for the position of the agent and target
point resulted in an increase of the distance between
them with a larger probability. This leads to a higher
chance of failing the agent to reach the destination.
To address the agent’s challenge, we selectively chose
a distance parameter L between the agent and target,
starting with a smaller value and increasing them over
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
274

the training allowing the agent to learn a better navi-
gation experience for a continually changing environ-
ment leading to more extensive training samples dis-
tribution.
During the navigation, when the DQL trained
agent is unable to find the path to proceed, we design
penalties so the agent is constrained to either staying
in the same position until the path is cleared or re-
tracing its steps backwards to the previous possible
path. We acknowledge that this part of the algorithm
requires further attention, as remaining in one place
in a real fire scenario is not realistic.
5 MOVEMENT PLANNING
THROUGH DEEP Q LEARNING
FOR FIREFIGHTING
APPLICATION
We have demonstrated the potential deep Q-learning
based algorithms hold as a base framework off of
which a successful navigation assistant can be built.
This methodology can provide an efficient decision-
making system for aiding firefighters whos decision-
making abilities may be impaired due to disorienta-
tion, anxiety, and heightened stress levels. This work
presents a novel approach to eliminating faulty deci-
sions made under duress through the application of AI
planning paradigms. The paths followed by the fire-
fighters are useful to determine their positions, which
is particularly important in search and rescue.
Existing path planning algorithms can process the
information of all paths followed by the firefighters
but fail under the constantly changing nature of the
fire ground which can make a previously defined res-
cue plan unavailable. Also, the presence of smoke
and other visual impairments could make difficult the
rapid identification of these incidents by a firefighter.
Incidents in the fire ground are hardly predictable by
a machine learning system. Machine learning does
however, perform well in rapid assessment and pro-
duction of a decision given the current set of circum-
stances. In other research outside of the scope of this
paper, (Bhattarai and Mart
´
ıNez-Ram
´
on, 2020; Bhat-
tarai et al., 2020) have developed a machine learn-
ing based methodology that detects and tracks objects
of interest such as doors, ladders, people and fire in
the thermal imagery generated by firefighter’s thermal
cameras. Such information may be valuable to fur-
ther improve the reinforcement learning algorithm’s
ability to understand aspects of the environment that
may be used in navigation or escape. Future work
looks to incorporate a similar object detection work
with the path planning work described here to make
a robust, navigation assistant that is capable of un-
derstanding the surrounding environment outside of
fire presence and then recommend best paths to fire
fighters. To deploy the agent in a real fire situation,
we also aim to first construct the 3D map based on
multimodal data(RGB, infrared and depth map) col-
lected from various sensors attached to firefighter’s
body sensors. Such a map can be imported to the em-
ulator to train the agent in more natural look-a-like
environment.
Assuming that a path has been previously deter-
mined by the system by using the information coming
from the camera of the rescuer, the rescuer has access
to an initial rescue path. The system tells the rescuer
to take a direction, which is the present action. The
states will be represented by the objects present in the
scene. The objects of interest can be represented in
a matrix that contains the extracted feature’s image.
Each detected feature has a different reward. Fire and
obstacles have associated penalties, while a clear path
has a positive reward. If an obstacle is detected, then
the firefighter is told to take a different direction. The
new state will be computed for the action taken and
a new path will be traced. The recursion repeats un-
til the rescuer has reached the desired position. The
plan for this part of the research will include an initial
model constructed by simulation. This will be useful
to determine the right design for the neural network in
terms of stability and convergence speed in different
simulated situations. When incorporating information
from other paths followed by other fire fighters in a
real scene, it is not evident that all obstacles can be
determined by their past experiences due to the dy-
namic nature of a real fire scene. Nevertheless, the
parallax estimation obtained from sequences of cam-
eras in motion can be helpful. Parallax data can be
used to determine the depth of a given path because
it gives the distances between the camera and the key
points detected by the SIFT algorithm. This informa-
tion only needs to be stored and compared with fu-
ture sequences of the same path. We can consider that
an obstacle has been found in a previously clear path
if the estimated depth has dramatically changed. In
this case. the direction pointed by the camera will be
given a low reward instead of a high one.
6 CONCLUSION AND FUTURE
DIRECTIONS
We present a deep Q-learning based agent trained in
a virtual environment that is able to make decisions
for navigation in an adaptive way in a fire scene. The
A Deep Q-learning based Path Planning and Navigation System for Firefighting Environments
275

Unreal engine was used to emulate the fire environ-
ment and AirSim was used to communicate data and
controls between the virtual environment to the deep
learning model. The agent was successfully able to
navigate extreme fires based on its acquired knowl-
edge and experience.
This work serves as the foundation on which to
build a deep learning framework that is capable of
identifying objects within the environment and incor-
porating those objects into its decision making pro-
cess in order to successfully deliver safe, navigable
routes to firefighters.
The learning process is currently slow and needs
several hours of training. In the future, we aim to uti-
lize A2C and A3C based reinforcement learning mod-
els to train a shared model utilized in parallel by mul-
tiple agents with multiple goals simultaneously. we
also aim to use the deep learning-based results such as
object detection, tracking, and segmentation to create
a more informative situational awareness map of the
reconstructed 3d scene.
The proposed system is intended to be integrated
in a geographic and visual environment with data of
the floor plan, which will also include scene infor-
mation about the fire locations, doors, windows, de-
tected firefighters, health condition of the firefighters
and other features that are collected from the sensors
carried in the fire fighter gear, which will be transmit-
ted over a robust communication system to an inci-
dent commander to produce a fully flexed situational
awareness system.
ACKNOWLEDGEMENTS
This work was supported by the National Science
Foundation (NSF) Smart & Connected Communities
(S&CC) Early-Concept Grants For Exploratory Re-
search (EAGER) under Grant 1637092. We would
like to thank the UNM Center for Advanced Research
Computing, supported in part by the National Sci-
ence Foundation, for providing the high-performance
computing, large-scale storage, and visualization re-
sources used in this work. We would also like to thank
Sophia Thompson for her valuable suggestions and
contributions to the edits of the final drafts.
REFERENCES
Abadi, M., Barham, P., Chen, J., Chen, Z., Davis, A.,
Dean, J., Devin, M., Ghemawat, S., Irving, G., Isard,
M., et al. (2016). Tensorflow: A system for large-
scale machine learning. In 12th {USENIX} sympo-
sium on operating systems design and implementation
({OSDI} 16), pages 265–283.
Anderson, J. D. and Wendt, J. (1995). Computational fluid
dynamics, volume 206. Springer.
Bae, H., Kim, G., Kim, J., Qian, D., and Lee, S. (2019).
Multi-robot path planning method using reinforce-
ment learning. Applied Sciences, 9(15):3057.
Beachly, E., Detweiler, C., Elbaum, S., Duncan, B., Hilde-
brandt, C., Twidwell, D., and Allen, C. (2018). Fire-
aware planning of aerial trajectories and ignitions.
In 2018 IEEE/RSJ International Conference on In-
telligent Robots and Systems (IROS), pages 685–692.
IEEE.
Beamer, S., Asanovic, K., and Patterson, D. (2012).
Direction-optimizing breadth-first search. In SC’12:
Proceedings of the International Conference on High
Performance Computing, Networking, Storage and
Analysis, pages 1–10. IEEE.
Bellman, R. (1966). Dynamic programming. Science,
153(3731):34–37.
Bhattarai, M., Jensen-Curtis, A. R., and Mart
´
ıNez-Ram
´
on,
M. (2020). An embedded deep learning system for
augmented reality in firefighting applications. arXiv
preprint arXiv:2009.10679.
Bhattarai, M. and Mart
´
ıNez-Ram
´
on, M. (2020). A deep
learning framework for detection of targets in ther-
mal images to improve firefighting. IEEE Access,
8:88308–88321.
Goodwin, M., Granmo, O.-C., and Radianti, J. (2015).
Escape planning in realistic fire scenarios with ant
colony optimisation. Applied Intelligence, 42(1):24–
35.
Jarvis, R. A. and Marzouqi, M. S. (2005). Robot path plan-
ning in high risk fire front environments. In TENCON
2005-2005 IEEE Region 10 Conference, pages 1–6.
IEEE.
Kiran, B. R., Sobh, I., Talpaert, V., Mannion, P., Sallab, A.
A. A., Yogamani, S., and P
´
erez, P. (2020). Deep rein-
forcement learning for autonomous driving: A survey.
arXiv preprint arXiv:2002.00444.
LaValle, S. M. (2006). Planning algorithms. Cambridge
university press.
Lei, X., Zhang, Z., and Dong, P. (2018). Dynamic path
planning of unknown environment based on deep re-
inforcement learning. Journal of Robotics, 2018.
Li, Y., Li, C., and Zhang, Z. (2006). Q-learning based
method of adaptive path planning for mobile robot.
In 2006 IEEE international conference on information
acquisition, pages 983–987. IEEE.
Meyes, R., Tercan, H., Roggendorf, S., Thiele, T., B
¨
uscher,
C., Obdenbusch, M., Brecher, C., Jeschke, S., and
Meisen, T. (2017). Motion planning for industrial
robots using reinforcement learning. Procedia CIRP,
63:107–112.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M.
(2013). Playing atari with deep reinforcement learn-
ing. arXiv preprint arXiv:1312.5602.
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A., Ve-
ness, J., Bellemare, M. G., Graves, A., Riedmiller, M.,
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
276

Fidjeland, A. K., Ostrovski, G., et al. (2015). Human-
level control through deep reinforcement learning. na-
ture, 518(7540):529–533.
Qiu, W. and Yuille, A. (2016). Unrealcv: Connecting com-
puter vision to unreal engine. In European Conference
on Computer Vision, pages 909–916. Springer.
Ranaweera, D. M., Hemapala, K. U., Buddhika, A., and
Jayasekara, P. (2018). A shortest path planning al-
gorithm for pso base firefighting robots. In 2018
Fourth International Conference on Advances in Elec-
trical, Electronics, Information, Communication and
Bio-Informatics (AEEICB), pages 1–5. IEEE.
Romero-Mart
´
ı, D. P., N
´
unez-Varela, J. I., Soubervielle-
Montalvo, C., and Orozco-de-la Paz, A. (2016). Navi-
gation and path planning using reinforcement learning
for a roomba robot. In 2016 XVIII Congreso Mexicano
de Robotica, pages 1–5. IEEE.
Shah, S., Dey, D., Lovett, C., and Kapoor, A. (2018). Air-
sim: High-fidelity visual and physical simulation for
autonomous vehicles. In Field and service robotics,
pages 621–635. Springer.
Silver, D., Schrittwieser, J., Simonyan, K., Antonoglou, I.,
Huang, A., Guez, A., Hubert, T., Baker, L., Lai, M.,
Bolton, A., et al. (2017). Mastering the game of go
without human knowledge. nature, 550(7676):354–
359.
Spitzer, F. (2013). Principles of random walk, volume 34.
Springer Science & Business Media.
Su, H.-S. and Su, K.-L. (2012). Path planning of fire-
escaping system for intelligent building. Artificial Life
and Robotics, 17(2):216–220.
Surmann, H., Jestel, C., Marchel, R., Musberg, F., El-
hadj, H., and Ardani, M. (2020). Deep reinforce-
ment learning for real autonomous mobile robot
navigation in indoor environments. arXiv preprint
arXiv:2005.13857.
Tang, Z., Shao, K., Zhao, D., and Zhu, Y. (2017). Re-
cent progress of deep reinforcement learning: from
alphago to alphago zero. Control Theory and Appli-
cations, 34(12):1529–1546.
Tarjan, R. (1972). Depth-first search and linear graph algo-
rithms. SIAM journal on computing, 1(2):146–160.
Tieleman, T. and Hinton, G. (2012). Lecture 6.5-rmsprop:
Divide the gradient by a running average of its recent
magnitude. COURSERA: Neural networks for ma-
chine learning, 4(2):26–31.
Vadlamani, V. K., Bhattarai, M., Ajith, M., and Martınez-
Ramon, M. (2020). A novel indoor positioning system
for unprepared firefighting scenarios. arXiv preprint
arXiv:2008.01344.
Zhang, L., Liu, Z., Zhang, Y., and Ai, J. (2018). Intel-
ligent path planning and following for uavs in forest
surveillance and fire fighting missions. In 2018 IEEE
CSAA Guidance, Navigation and Control Conference
(CGNCC), pages 1–6. IEEE.
Zhang, Z. (2020). Path planning of a firefighting robot pro-
totype using gps navigation. In Proceedings of the
2020 3rd International Conference on Robot Systems
and Applications, pages 16–20.
A Deep Q-learning based Path Planning and Navigation System for Firefighting Environments
277
