
Detecting Object Defects with Fusioning Convolutional Siamese Neural
Networks
Amr M. Nagy
1,2
and L
´
aszl
´
o Cz
´
uni
1
1
Faculty of Information Technology, University of Pannonia, Egyetem u. 10, Veszpr
´
em, Hungary
2
Faculty of Computers and Artificial Intelligence, Benha University, Egypt
Keywords:
Visual Inspection, Defect Detection, Siamese Neural Network.
Abstract:
Recently, the combination of deep learning algorithms with visual inspection technology allows differentiating
anomalies in objects mimicking human visual inspection. While it offers precise and persistent monitoring
with a minimum amount of human activity but to apply the same solution to a wide variety of defect types is
challenging. In this paper, a new convolutional siamese neural model is presented to recognize different types
of defects. One advantage of the proposed convolutional siamese neural network is that it can be used for new
object types without re-training with much better performance than other siamese networks: it can generalize
the knowledge of defect types and can apply it to new object classes. The proposed approach is tested with
good results on two different data sets: one contains traffic signs of different types and different distortions,
the other is a set of metal disk-shape castings with and without defects.
1 INTRODUCTION
Recently, deep learning algorithms are widely used
in many areas of computer vision and have proved to
achieve human level accuracy or even better. They be-
came the favourite methods for many various vision
tasks including object detection, recognition, pose es-
timation, and image segmentation.
In order to meet industrial expectations, there is
a strong need to achieve high performance in auto-
mated visual inspection which means observation of
the same type of objects repeatedly to detect anoma-
lies. There is a wide field of such applications includ-
ing automated product manufacturing, railway indus-
try, casting or welding, healthcare. A general taxon-
omy of the different defects was presented in (Cz-
immermann et al., 2020): those detectable by only
visual methods (e.g. contamination, color or shape
errors) and palpable (detectable by touch and vision,
e.g. cracks, bumps). In this paper we are interested
with visible defects such as errors of disk castings or
common problems with traffic signs (fading, occlu-
sions, scribbles, and their combinations). See Figure
1 and Figure 6 for illustration of the defects under in-
vestigation.
The defect detection process can be formulated as
either an object detection or a segmentation task. In
the object detection approach the goal is to detect each
Figure 1: Traffic sings, as examples for the 7 distortion
classes, under investigation: faded, covered, scribbled, cor-
rect, covered and faded, covered and scribbled, faded and
scribbled.
defect in the image and classify it to one of the pre-
defined classes. In the image segmentation approach
the problem is essentially solved by pixel classifica-
tion, where the goal is to classify each image pixel as
part of a defect or not. In general, object detection and
instance segmentation are difficult tasks, as the num-
ber of instances in a particular image is unknown and
often unbounded. Additionally, due to a wide range of
products to be assembled, sensors cannot easily adapt
to different materials and shapes of the products to
be inspected, variations in the object’s position, light-
ing, and background cause additional challenges to
this task.
A neural network is often used to learn to predict
object or attribute classes. When we need to add new
or remove classes we have to re-train the network on
the modified dataset. In addition, we need a signif-
icant amount of new training data to obtain satisfac-
tory performance. One solution for this issue is to
use siamese neural networks (SNNs) (Bromley et al.,
1994). SNNs take two inputs, on both images run the
Nagy, A. and Czúni, L.
Detecting Object Defects with Fusioning Convolutional Siamese Neural Networks.
DOI: 10.5220/0010263301570163
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
157-163
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
157

same neural processing parallel, then combine the two
branches to implement a similarity function between
the inputs. In case of proper training SNNs can learn
the features which are proper to differentiate the ob-
jects or some of their features. However, it can be a
key question what is the maximal variability of input
images where the same similarity function is still suf-
ficient.
In our paper we propose to train special SNNs to
predict if the pairs of the images belong to the same
defect class or not. We assume that, in case of satis-
factory training data, our network can generalize the
visual appearance of visual defects, thus we can ap-
ply the same network for new object classes with-
out re-training. The main contribution of our paper
is a siamese type network which, besides comput-
ing the difference of the features, contains the con-
catenation and further processing of these features.
In the article we refer to it as Fusioning Convolu-
tional Siamese Neural Network (FCSNN). Moreover,
we test the generalization properties of our network to
learn the latent defect specific features by predicting
the errors of new untrained object classes with differ-
ent appearance.
Our paper is organized as follows. In the next Sec-
tion we overview related papers then in Section 3 we
explain the proposed method. In 3.2 the used datasets
are introduced while the experiments and evaluations
can be found in Sections 4. Finally, we conclude our
article in the last Section.
2 RELATED WORKS
It is possible to classify the visual inspections ap-
proaches into low-level image processing approaches
such as statistical (Zhu et al., 2015), structural (Cao
et al., 2015; Yun et al., 2019), filter-based (Kang et al.,
2015), model-based (Xi et al., 2017; Zhang et al.,
2020), and high-level image processing approaches
such as supervised (He et al., 2019) unsupervised or
semi-supervised classifiers (Mei et al., 2018).
Statistical methods concentrate on analyzing the
spatial distribution of pixel values in an image. In
(Zhu et al., 2015), they proposed a new algorithm
by combining the autocorrelation function with the
grey level co-occurrence matrix. First, autocorrela-
tion function is used to determine the pattern period
then the size of detection window can be obtained
thus co-occurrence can be computed. In order to dis-
tinguish defective and defect-free images, Euclidean
distance is computed between templates and queries.
Structural approaches primarily concentrate on
the texture elements’ spatial position. Such elements
can be extracted from the texture and defined as tex-
ture primitives. Simple grey-scale areas, line seg-
ments or individual pixels are often the texture prim-
itives. (Cao et al., 2015) deals with fabric defect in-
spection: they proposed prior knowledge guided least
squares regression (PG-LSR) to combine the global
structure of texture feature space and the prior from
local similarity. This combination helps to generate
a more clear irregularity map and to identify various
defects accurately and robustly.
Images are often described by detected features,
such as edges, textures and regions. In (Gai, 2016)
a banknote defect detection algorithm is presented to
detect cracks and scratches on banknote images us-
ing a quaternion wavelet transform and edge intensity.
The banknote image is first registered using the least
squares method under the quaternion wavelet decom-
position framework. The defective features are ex-
tracted using edge difference between the reference
image and the test image. Naturally, this traditional
framework can be used in case of very similar sample
images. In (Xi et al., 2017) also a differential filter
is used to distinguish the defect among the textures,
but here a quantitative model characterizing the im-
pact of illumination on the image is developed, based
on which the non-uniform brightness in the image can
be effectively removed. By comparing the model out-
put against the captured image the illumination effect
can be successfully removed.
In our paper we are interested in deep learning so-
lutions, which are good to create a general framework
handling all the above mentioned aspects. We suggest
the reader to consider (Wang et al., 2018), where the
authors provide comprehensive survey of commonly
used deep learning algorithms and discussed their ap-
plications. In (Weimer et al., 2016) some design con-
siderations for deep learning networks are discussed
for visual inspection problems. There are many simi-
lar solutions for the recognition of visual defects: the
first step is feature extraction in a number of layers,
then using fully connected layers for classification
can be considered now as a ’traditional’ approach: In
(Faghih-Roohi et al., 2016) identification of rail sur-
face defects, in (Jinsong Zhu, 2020) the detection of
bridge defects, in (Hoskere et al., 2018) a multiscale
CNN architecture for the detection of post-earthquake
structural distortions use similar approaches. An al-
ternative solution is the segmentation of defects where
autoencoder based networks are popular. Inspection-
Net (Yang et al., 2019), applied for the analysis of
wall cracks, is one example. In order to build a scal-
able visual inspection framework, that could be used
in solving a variety of inspection tasks within a manu-
facturing context, (P. Liatsis, 2009) uses higher-order
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
158
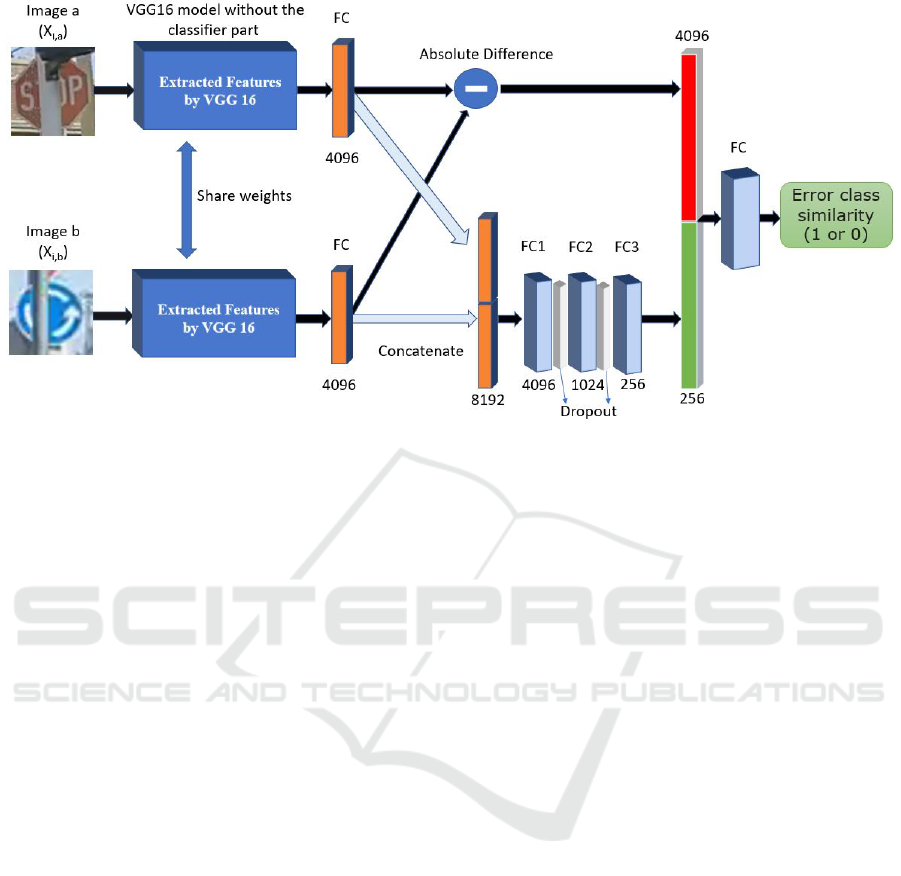
Figure 2: The proposed fusioning convolutional siamese neural network (FCSNN) architecture.
neural networks (HONNs) extracting geometric fea-
tures invariant to translation and rotation. A major
issue with higher-order neural networks is the combi-
natorial explosion of the higher-order terms. Authors
addressed this problem with an alternative image rep-
resentation strategy of coarse coding. They developed
a genetic algorithm tool for the automated determina-
tion of the optimal number of hidden units in the neu-
ral network. The generic applicability of the method
is tested in two applications: the inspection of ax-
isymmetric components and rivets is discussed, also
including the effect of different noises on the input
images.
Besides the ’traditional’ and autoencoder ap-
proaches siamese networks can also be alternatives.
In (Deshpande et al., 2020) a siamese network is ap-
plied to detect manufacturing defects in steel surfaces.
While we also build on a siamese structure to detect
features, our architecture differs much in the second
part (following the siamese branches) of the network.
The testing use case is also different: our main ques-
tion is how the network can generalize its detection
abilities when the visual appearance of object classes
are relatively high.
3 THE PROPOSED METHOD
Siamese networks (Bromley et al., 1994) are neu-
ral networks containing two or more sub-networks
that are connected by a layer which is typically re-
sponsible for the comparison of the features of the
branches. The sub-networks are identical: they have
the same parameters and weights trained simultane-
ously. The main idea behind siamese networks is to
learn the proper similarity function needed for the ef-
ficient comparison of input images in a specific task.
In our paper we propose a siamese neural network
where not only the differences of features but the fu-
sion of the features is also processed with several fully
connected layers.
3.1 Proposed Architecture
For feature extraction we used the ImageNet pre-
trained VGG16 model (Russakovsky et al., 2015) as
the parallel sub-networks. The pair of input images
(X
i,a
and X
i,b
) are passed through the VGG16 net-
works to generate the fixed length feature vectors,
then we added a fully connected classifier type layer
to each branch to learn how to interpret the extracted
features on an our dataset. Thus, we have two vec-
tors of length 4096. We utilized these vectors in two
different ways. First, we computed the absolute dif-
ference between the two feature vectors by L
1
dis-
tance. In the second branch, we concatenated the
two feature vectors into one vector and fed it to three
fully connected layers and two dropout layers with
dropout ratio of 0.2. At the end, we concatenate the
two branches into one vector and fed it to a fully con-
nected sigmoid layer to generate the similarity score
output. The model was compiled using the Adam
optimizer and the binary cross entropy loss function.
The learning rate was set 0.0004. The architecture is
illustrated in Figure 2.
Detecting Object Defects with Fusioning Convolutional Siamese Neural Networks
159
3.2 Datasets
For the better illustration of the training and eval-
uation procedure first we introduce the datasets.
We evaluated the proposed method on two different
datasets: our own taffic signs dataset and a dataset
with disk castings from the Kaggle website.
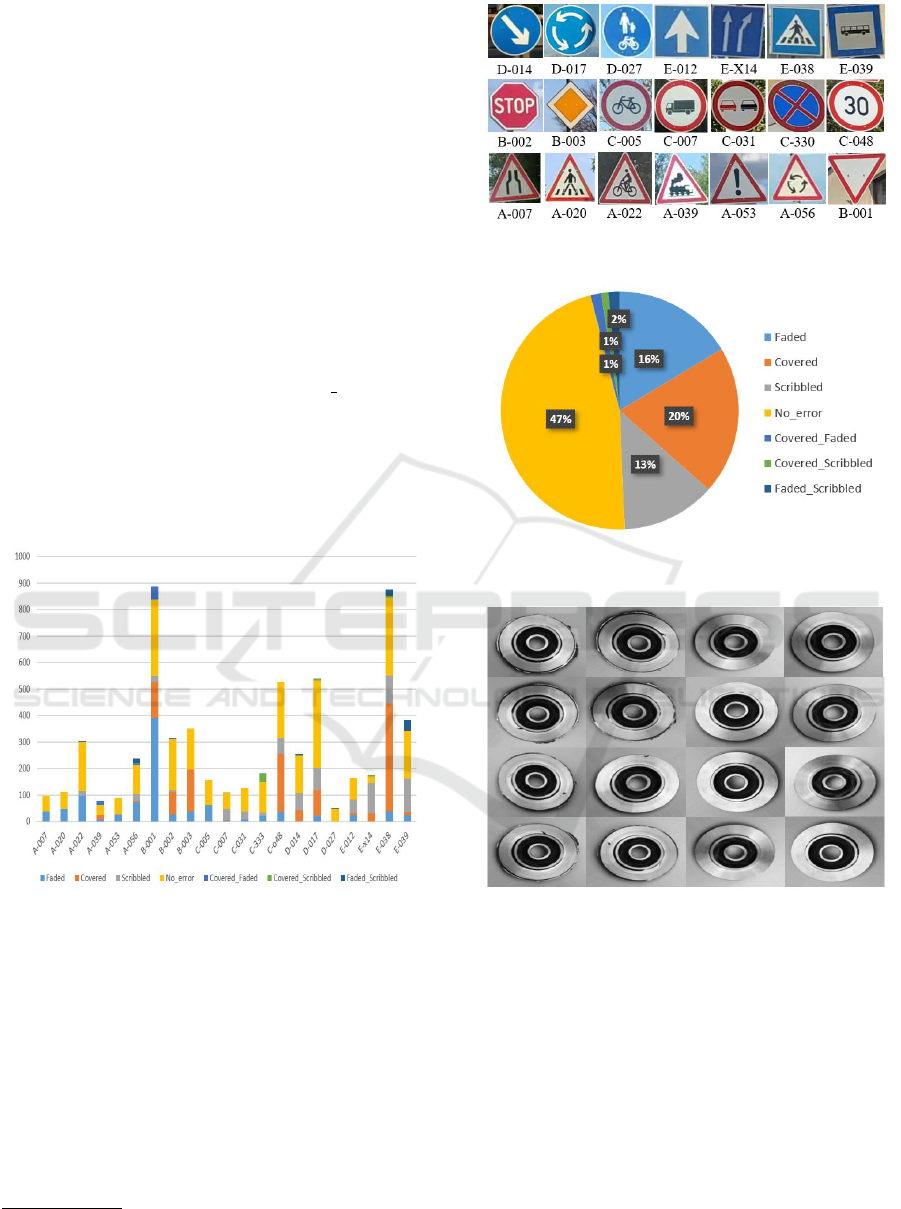
3.2.1 Traffic Signs Dataset
There are several traffic sign datasets available but
those contain no information about distortions. Our
training traffic signs dataset includes 21 different
types of traffic signs, see Figure 4 for sample images.
The 6016 images were captured by dashboard cam-
eras. We classified the dataset into 8 defect distortion
classes (Faded, Covered, Scribbled, No error, Cov-
ered & Faded, Covered & Scribbled, Faded & Scrib-
bled, Covered & Faded & Scribbled). Each defect
class contain a different number of traffic signs see
Figure 3 and 5 for the exact number in each defect
class. This dataset was used for training. For testing
we used a separate dataset introduced in Section 4.2.
Figure 3: Distribution of traffic signs of the training data
with each error class.
3.2.2 Castings Dataset
1
Casting dataset includes only two different defect
classes: defective or errorless as illustrated by Fig-
ure 6. It contains 7348 images with the top view of
submersible pump impellers. The size of the gray-
scale images is 300 by 300 pixels. This dataset is split
into training and testing folders. For training we have
3758 defected and 2875 correct product images. For
testing the corresponding numbers are 453 and 262.
1
https://www.kaggle.com/ravirajsinh45/real-life-
industrial-dataset-of-casting-product
Figure 4: Traffic signs in the training dataset with their class
codes.
Figure 5: Percentage of images for each defect class in the
training dataset.
Figure 6: Example images from the castings dataset. First
two columns show objects with defects, the other two
columns are free from errors.
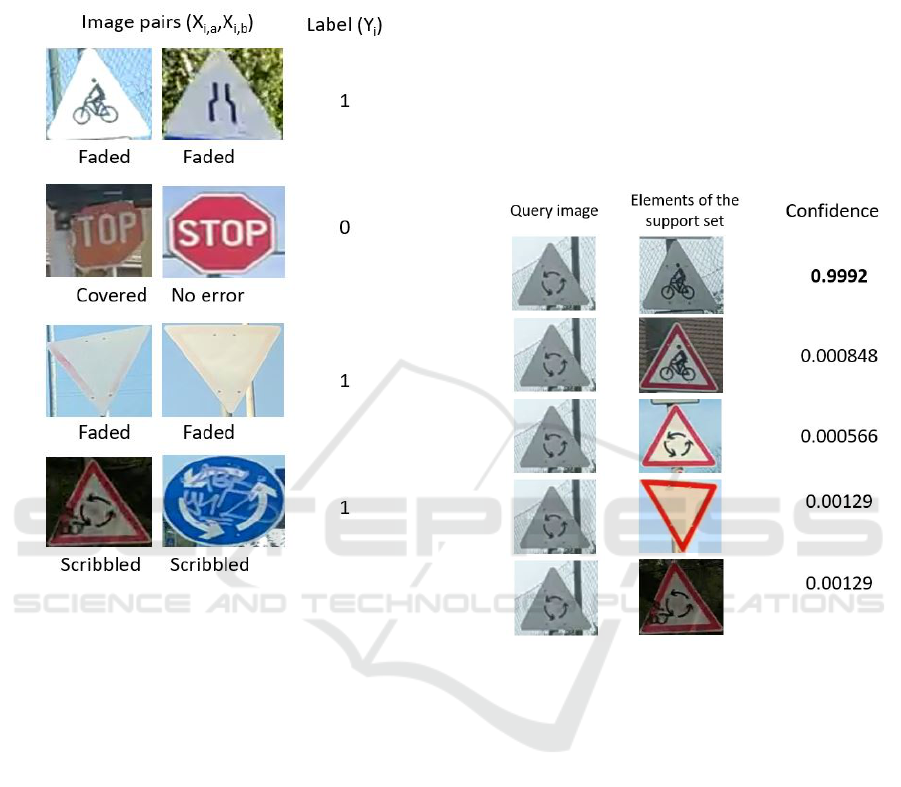
3.3 Training
To train a siamese network, we must create pairs of
images: there can be pairs where both images are
from the same error class and others where the two
images are from different error classes. Figure 7
shows a few examples of how these pairs can look,
good pairs (pairs with identical defect attribute) will
be given label 1 and distinct pairs are labeled 0. We
will generate these pairs randomly from all the defect
classes in the training data, thus the dataset contains
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
160
pairs of (X
i
,Y
i
) where Y
i
is the required output (1 or
0). Recall that the input to our system will be a pair
of images and the output will be a similarity score
between 0 and 1.
Figure 7: Examples of training pairs with their labels.
3.4 N-way One Shot Classification
We will perform N-way one shot classification (Lake
et al., 2013) as a strategy in order to evaluate the mod-
els. In one-shot classification the elements of the sup-
port set X
i,b
are compared to each image of the test
set X
i,a
(the queries). The query image is paired to N
images: one pair has label 1, all the others have label
0. N implies how many images the support set will
contain, we tested the model with N = 20 (20-way
one-shot classification).
The trained model should predict 1 for image
pairs with the same error class (high confidence) and
should give 0 for pairs from different error classes.
Thus after ordering the pairs of the supports test in de-
creasing order, the first class of the first element X
i,b
is considered as the decision of the network:
c
X
i,b
= argmax
X
i,b
Con f idence(X
i
) (1)
In case of correct prediction the elements of the
pair with the maximum confidence probability value
will be from the same error class. During testing the
generation of the support set and the evaluation of the
prediction is repeated k times:
CorrectPrecentage = 100 × n
correct
/k (2)
where k is total number of trials and n
correct
equals the
number of correct predictions.
In Figure 8 we show an example for 5-way one
shot classification. It is expected that the pair of im-
ages in the first line will have the highest confidence
since they have identical defects.
Figure 8: An example for 5-way one shot testing. Since the
pair with the same defect has the highest confidence, the
network made a correct classification.
4 EXPERIMENTAL RESULTS
The proposed FCSNN architecture was used to es-
timate whether two images are from the same error
class or not. The testing method itself is quite strict
since in case of 20-way one shot classification the
recognition is evaluated as correct if the right pair
has the highest confidence from the 20 comparisons.
While in case of castings all images look similar, the
traffic signs tests contain objects with large differ-
ences in visual appearance.
4.1 Testing on the Castings Dataset
In Table 1 we list the test results of four different neu-
ral networks, where the proposed architecture is de-
noted as FCSNN. Since in this experiment FCSNN
Detecting Object Defects with Fusioning Convolutional Siamese Neural Networks
161

was evaluated with 20-way one shot classification,
the result is the average of 10 such tests. Our pro-
posed network outperformed the siamese network of
(Koch, 2015) and a fine tuned VGG16 network but it
is slightly worse than ResNet34.
Table 1: Accuracy on the castings dataset with different
deep learning algorithms from Kaggle website, with the
siamese network of (Koch, 2015), and our network (FC-
SNN).
Method Accuracy
Fine Tuned VGG16 98.89%
ResNet34 99.70%
Siamese (Koch, 2015) 97.90%
FCSNN 99.50%
4.2 Testing on Untrained Classes of
Traffic Signs
Traffic signs could be considered as good test objects
since we have lots of types of them. Unfortunately,
it is not easy to collect large number of real traffic
sign images with different defects. We created a test-
ing dataset with 25 traffic sign classes which were not
used in the training of the FCSNN. This dataset con-
tains 490 images loaded with one of the following 4
defects: faded, covered, scribbled, errorless. See Fig-
ure 9 for examples of the new object classes and Fig-
ure 10 for the number of images in each defect class.
We evaluated the defect classification accuracy of
SNN (Koch, 2015), SNN with VGG16, and FCSNN
with the 20-way one shot classification technique.
The average results of 10 experiments are given in
Table 2. 3 test cases, for the error classes faded,
covered, and scribbled, were evaluated independently,
their weighted average is also given. The performance
of SNN is the lowest. To be able to measure the con-
tribution of our proposal we replaced the feature ex-
traction part of (Koch, 2015) with VGG16. This mod-
ified network gave significantly better results. Our
proposal (FCSNN) outperformed this variation with
circa 9.5% in average. The reason for the big vari-
ance between the accuracy of the three error classes
is to be discovered in future.
5 CONCLUSIONS
In our paper we proposed a new siamese neural net-
work architecture to recognize the defects of differ-
ent objects. The previously proposed networks were
extended by several layers and the original features,
besides computing the difference, were retained for
Figure 9: Examples images for the untrained traffic sign
types.
Figure 10: Distribution of the untrained traffic signs with
each error class.
fully connected layers. Two datasets were used for
evaluation with 20-way one shot testing. These tests
show that the proposed architecture performs signif-
icantly better than previous solutions for such cases,
when untrained types of objects are tested. In future
we plan to extend our datasets with other types of ob-
jects and would like to enhance the ability to learn
latent information for unknown object classes.
ACKNOWLEDGEMENTS
We acknowledge the financial support of the
Sz
´
echenyi 2020 program under the project EFOP-
3.6.1-16-2016-00015, and the Hungarian Research
Fund, grant OTKA K 120367. We are grateful to
the NVIDIA Corporation for supporting our research
with GPUs obtained by the NVIDIA GPU Grant Pro-
gram. Also we acknowledge the help of our col-
leagues in data collection, namely Zsolt V
¨
or
¨
osh
´
azi,
Katalin T
¨
om
¨
ordi,
´
Agnes Lipovits, N
´
andor Szoll
´
at,
and D
´
aniel Zajzon.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
162

Table 2: Accuracy of three siamese networks on untrained traffic signs for three independent tests.
Test cases (distribution of images) SNN (Koch, 2015) SNN (Koch, 2015)
with VGG16 features
FCSNN
12 traffic sign classes, 66 faded and 162 errorless 43.3% 80.6% 92%
21 traffic sign classes, 92 covered and 195 errorless 7.5% 27.9% 28.9%
6 traffic sign classes, 34 scribbled and 54 errorless 9.4% 11.5% 25.8%
Weighted average 22.32% 43.12% 52.81%
REFERENCES
Bromley, J., Guyon, I., LeCun, Y., S
¨
ackinger, E., and Shah,
R. (1994). Signature verification using a” siamese”
time delay neural network. In Advances in neural in-
formation processing systems, pages 737–744.
Cao, J., Zhang, J., Wen, Z., Wang, N., and Liu, X. (2015).
Fabric defect inspection using prior knowledge guided
least squares regression. Multimedia Tools and Appli-
cations, 76:4141–4157.
Czimmermann, T., Ciuti, G., Milazzo, M., Chiurazzi, M.,
Roccella, S., Oddo, C. M., and Dario, P. (2020).
Visual-based defect detection and classification ap-
proaches for industrial applications—a survey. Sen-
sors, 20(5):1459.
Deshpande, A. M., Minai, A. A., and Kumar, M. (2020).
One-shot recognition of manufacturing defects in steel
surfaces. arXiv preprint arXiv:2005.05815.
Faghih-Roohi, S., Hajizadeh, S., N
´
u
˜
nez, A., Babuska, R.,
and De Schutter, B. (2016). Deep convolutional neu-
ral networks for detection of rail surface defects. In
2016 International joint conference on neural net-
works (IJCNN), pages 2584–2589. IEEE.
Gai, S. (2016). New banknote defect detection algorithm
using quaternion wavelet transform. Neurocomputing,
196:133–139.
He, D., Xu, K., and Zhou, P. (2019). Defect detection of hot
rolled steels with a new object detection framework
called classification priority network. Computers &
Industrial Engineering, 128:290–297.
Hoskere, V., Narazaki, Y., Hoang, T., and Spencer Jr, B.
(2018). Vision-based structural inspection using mul-
tiscale deep convolutional neural networks. arXiv,
pages arXiv–1805.
Jinsong Zhu, Chi Zhang, H. Q. . Z. L. (2020). Vision-based
defects detection for bridges using transfer learning
and convolutional neural networks. Structure and In-
frastructure Engineering, pages 1037–1049.
Kang, X., Yang, P., and Jing, J. (2015). Defect detec-
tion on printed fabrics via gabor filter and regular
band. Journal of Fiber Bioengineering and Informat-
ics, 8(1):195–206.
Koch, G. R. (2015). Siamese neural networks for one-shot
image recognition.
Lake, B. M., Salakhutdinov, R. R., and Tenenbaum, J.
(2013). One-shot learning by inverting a composi-
tional causal process. In Advances in neural infor-
mation processing systems, pages 2526–2534.
Mei, S., Yang, H., and Yin, Z. (2018). An unsupervised-
learning-based approach for automated defect inspec-
tion on textured surfaces. IEEE Transactions on In-
strumentation and Measurement, 67(6):1266–1277.
P. Liatsis, J.Y. Goulermas, X.-J. Z. . E. M. (2009). A flexible
visual inspection system based on neural networks.
International Journal of Systems Science, pages 173–
186.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M., et al. (2015). Imagenet large scale visual
recognition challenge. International journal of com-
puter vision, 115(3):211–252.
Wang, J., Ma, Y., Zhang, L., Gao, R. X., and Wu, D. (2018).
Deep learning for smart manufacturing: Methods
and applications. Journal of Manufacturing Systems,
48:144–156.
Weimer, D., Scholz-Reiter, B., and Shpitalni, M. (2016).
Design of deep convolutional neural network archi-
tectures for automated feature extraction in industrial
inspection. CIRP Annals, 65(1):417–420.
Xi, J., Shentu, L., Hu, J., and Li, M. (2017). Automated
surface inspection for steel products using computer
vision approach. Applied optics, 56(2):184–192.
Yang, L., Li, B., Yang, G., Chang, Y., Liu, Z., Jiang, B., and
Xiaol, J. (2019). Deep neural network based visual in-
spection with 3d metric measurement of concrete de-
fects using wall-climbing robot. In 2019 IEEE/RSJ In-
ternational Conference on Intelligent Robots and Sys-
tems (IROS), pages 2849–2854.
Yun, J. P., Lee, S. J., Koo, G., Shin, C., and Park, C.
(2019). Automatic defect inspection system for steel
products with exhaustive dynamic encoding algorithm
for searches. Optical Engineering, 58(2):023107.
Zhang, Y., Xing, Y., Gong, Y., Jin, D., Li, H., and Liu, F.
(2020). A variable-level automated defect identifica-
tion model based on machine learning. Soft Comput-
ing, 24(2):1045–1061.
Zhu, D., Pan, R., Gao, W., and Zhang, J. (2015). Yarn-dyed
fabric defect detection based on autocorrelation func-
tion and glcm. Autex research journal, 15(3):226–232.
Detecting Object Defects with Fusioning Convolutional Siamese Neural Networks
163
