
Few-shot Linguistic Grounding of Visual Attributes and Relations using
Gaussian Kernels
Daniel Koudouna and Kasim Terzi
´
c
School of Computer Science, University of St Andrews, U.K.
Keywords:
Few-shot Learning, Learning Models, Attribute Learning, Relation Learning, Scene Understanding.
Abstract:
Understanding complex visual scenes is one of fundamental problems in computer vision, but learning in this
domain is challenging due to the inherent richness of the visual world and the vast number of possible scene
configurations. Current state of the art approaches to scene understanding often employ deep networks which
require large and densely annotated datasets. This goes against the seemingly intuitive learning abilities of
humans and our ability to generalise from few examples to unseen situations. In this paper, we propose a
unified framework for learning visual representation of words denoting attributes such as “blue” and relations
such as “left of” based on Gaussian models operating in a simple, unified feature space. The strength of our
model is that it only requires a small number of weak annotations and is able to generalize easily to unseen
situations such as recognizing object relations in unusual configurations. We demonstrate the effectiveness of
our model on the predicate detection task. Our model is able to outperform the state of the art on this task in
both the normal and zero-shot scenarios, while training on a dataset an order of magnitude smaller.
1 INTRODUCTION
The task of scene understanding is typically under-
stood to involve reasoning beyond the level of objects,
and the ability to express complex attributes and re-
lations between objects. This paves the way for an
automatic, natural language description of a scene, or
answering questions about it. In a world where we
increasingly use language to communicate with arti-
ficial agents (such as cars, assistive robots and smart
homes), it is essential for such agents to develop a rich
understanding of everyday visual scenes in order to
effectively communicate with users. Furthermore, it
is crucial that such agents can update their represen-
tations easily in order to adapt to changing circum-
stances and environments. For example, an assistive
robot helping a patient in their home is operating in an
environment where meaning of words such as “fast”
or “close to” can change over time, and will need to
adapt to such changes based on few examples.
The past decade has seen huge improvements
in terms of object detection performance, but the
wider task of scene understanding remains difficult.
Datasets such as GQA (Hudson and Manning, 2019)
have attempted to further the field of visual reason-
ing, but the need for meticulously annotated datasets
goes against the seemingly intuitive learning model
used by children when acquiring language, with their
ability to generalize learned concepts to unseen sit-
uations. Even with the emergence of large annotated
datasets, there still exists the problem of the vast num-
ber of possible configurations of objects, attributes
and relations in a natural scene. This leads to a com-
binatorial explosion for which it may be infeasible to
collect sufficient examples for each sample. Novel al-
gorithms and models are needed that can generalize,
like humans do, from observed scenes to new unseen
configurations and recent work has been shifting back
to parsing language as a way to achieve this (Johnson
et al., 2017).
Many recent approaches do not attempt to ground
each word individually but focus on learning combi-
nations of words, typically formulated as a joint fea-
ture learning problem on triples of the type (subject-
object-predicate). This allows them to build on
powerful feature extraction abilities of modern deep
networks, but requires large annotated datasets and
makes it harder to transfer knowledge between predi-
cates (Peyre et al., 2017).
We propose a novel approach which parses state-
ments in a formal language and attempts to sequen-
tially ground each word separately onto a common
feature space. This formalism allows us to express
objects (such as “cat”), attributes (such as “red”) and
146
Koudouna, D. and Terzi
´
c, K.
Few-shot Linguistic Grounding of Visual Attributes and Relations using Gaussian Kernels.
DOI: 10.5220/0010261301460156
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
146-156
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All r ights reserved
d
1
d
2
A
1
A
2
Annotations Predictions
“blue” “red” “blue” “red”
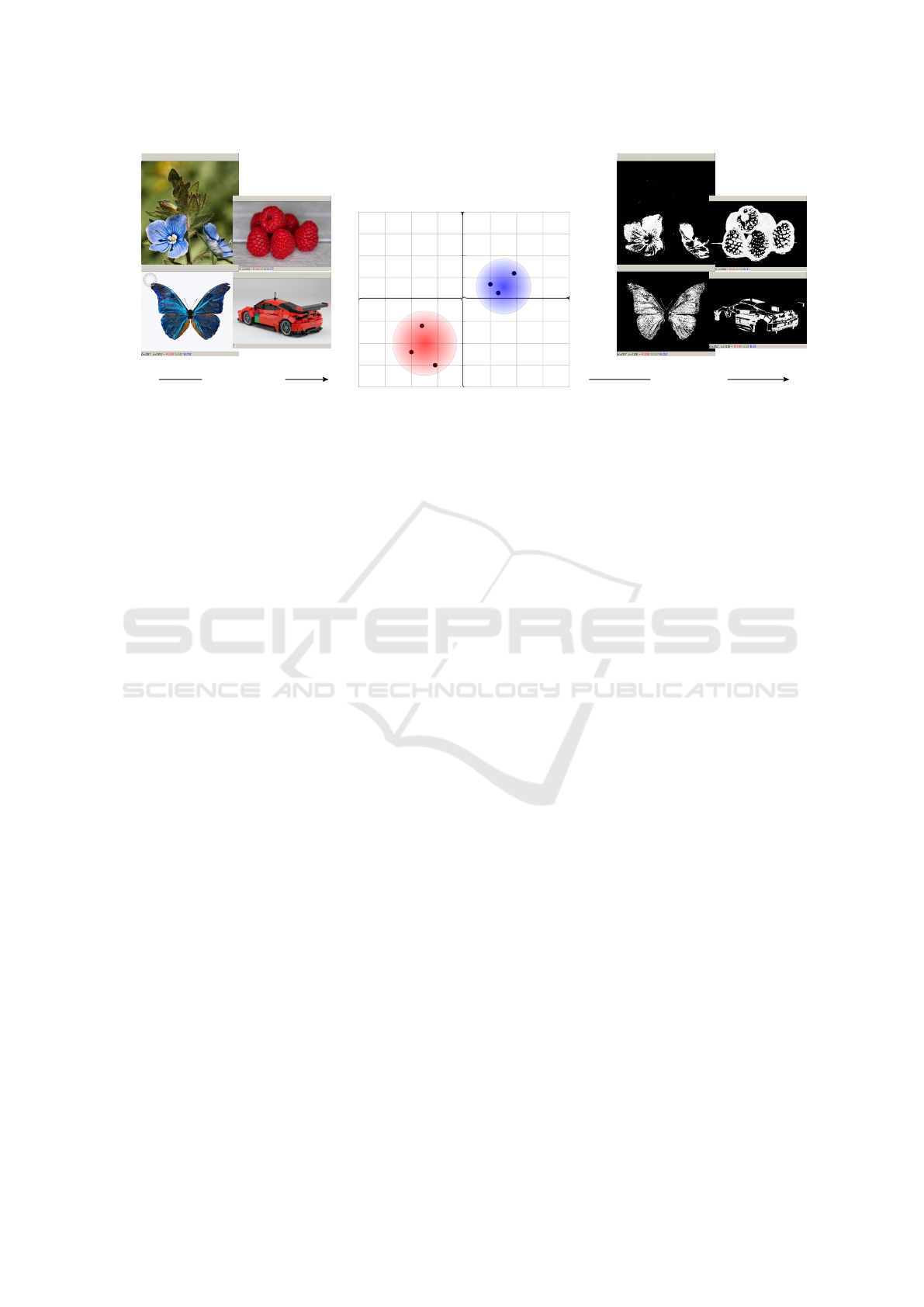
Figure 1: High-level overview of the model. Representing each pixel in the region of interest of the image as a feature vector,
we estimate the probability distribution of the annotated attribute or relation in the embedding space . The model is then able
to predict the degree of each attribute at each pixel.
relations (such as “left of”) as functions operating on
the same feature space. Although our model is far
simpler than existing methods, we demonstrate that it
can learn attributes (such as “red”) and relations (such
as “above”) from a very small number of images and
that they can easily transfer to unseen examples (zero-
shot learning).
This paper presents the following contributions:
1. a process for mapping attributes and relations from
language onto functions in a single, simple and inter-
pretable feature space, using Gaussian models, 2. a
formalism based on lambda calculus which ties both
natural language descriptions into a series of such that
are executed sequentially on a scene, and 3. a self-
guided learning approach that can learn these map-
pings from very few examples.
We purposefully keep both image features and our
model very simple to show that the power of the sys-
tem does not come from deeply learned features or
complex mathematical models, but from the mod-
elling of each visual attribute and relation indepen-
dently, and from the integration with language which
allows for sequential parsing of the scene. Our feature
space and functions used to represent concepts can
both be extended in the future but we want to show
that even at its simplest, this new model can match
the state of the art on some specific tasks and thus
presents a promising research direction. We demon-
strate this on the predicate detection task on the VRD
dataset, where we outperform the state of the art while
using a vastly smaller number of training examples
than other models. In addition, we present some qual-
itative results on learning attributes from random im-
ages queried from a search engine.
2 RELATED WORK
The relation between metric spaces and learned fea-
tures has been explored in the context of metric
learning and applied to the detection of attributes
in the context of image classification (Zhang et al.,
2019), object detection (Karlinsky et al., 2019; Sohn,
2016), and intra-class comparison (Kovashka et al.,
2015). Our approach to attribute and relation learning
is compatible with learned feature spaces but in this
paper we use a simple hand-crafted feature space to
demonstrate general applicability of our model.
Few-shot learning requires vision systems to
learn novel categories from a small number of ex-
amples, inspired by the learning capabilities that hu-
mans, especially children, exhibit in language learn-
ing (Carey and Bartlett, 1978; Xu and Tenenbaum,
2000). Few-shot learning has been successful in the
context of classification, which focuses on models
trained on traditional dataset which can then learn
new classes from one or few examples (Chen et al.,
2019; He et al., 2019; Karlinsky et al., 2019; Zhang
et al., 2019). We show that our model can learn gener-
alizable attributes and relations with very few exam-
ples without requiring a pre-existing learned model,
which more closely resembles human learning.
Relation learning is the task of learning and de-
tecting the relation between two objects in an im-
age. Some traditional AI approaches combined hand-
modelled spatial relations with probabilistic scene
models (Neumann and Terzi
´
c, 2010; Kreutzmann
et al., 2009) or constraints (Hotz et al., 2007) but did
not learn relations from annotated examples. Many
recent approaches have used a combination of visual
and language models to jointly learn triples in the
Few-shot Linguistic Grounding of Visual Attributes and Relations using Gaussian Kernels
147

form (subject-object-predicate). However, due to the
number of possible object classes and relations, there
has been a recent focus on learning relations more in-
dependently of the participating objects, such as de-
tecting unusual or previously unseen relations (Peyre
et al., 2017; Peyre et al., 2019), by driving attention
to regions of an image (Krishna et al., 2018; Luo and
Shakhnarovich, 2017), or by the explicit modelling
of executing functions (Andreas et al., 2016; Johnson
et al., 2017). Our approach is aligned with this direc-
tion of research, but we show that many relations can
be successfully learnt using a simple language model
and without powerful deep networks.
Language grounding and top-down processing
in visual tasks are long-standing topics in cognitive
science. We adopt an approach similar to classical
models such as BISHOP (Gorniak and Roy, 2004),
where a formal grammar defines a series of functions
executed on the scene. Unlike BISHOP, our model is
able to adopt a growing lexicon of learned words rep-
resenting attributes and relations using a grammar, ex-
tending the idea of scene description using a series of
interpretable feature maps (Richter et al., 2014). This
is in contrast with many modern approaches, which
often rely on word vectors (Lu et al., 2016; Peyre
et al., 2019) or generic embedding spaces (Krishna
et al., 2018; Sur
´
ıs et al., 2019) to disambiguate lan-
guage in relationship detection. Our work follows the
recent interest in learning individual words or phrases
from visual stimulus (Bisk et al., 2020; Jin et al.,
2020). In addition, our model is able to learn in a con-
tinual manner, expanding its vocabulary as new words
are introduced in a series of scenes.
3 MODEL
Our model operates on a common feature space for
evaluating both attributes and relations. We define
D
1
,D
2
,...D
n
as the dimensions of features extracted
from a scene. We represent each pixel in a h × w im-
age as a vector corresponding to its value in each fea-
ture dimension D
i
as p
p
p. We also define a field F as a
h×w matrix which stores a scalar value for each pixel
in a scene. In our model, fields represent results of op-
erations, similar to retinotopic maps in neural models.
3.1 Language
We adopt a language model in which each word of
a sentence is mapped into a function which is ex-
ecuted on the feature space representing the image.
We model the sentences as expressions in first order
logic. Objects in the scene are modelled as terms
in the logic. Object classes and attributes are mod-
elled as unary predicates, e.g Cat(x) indicates ob-
ject x is a cat. Combination of attributes is possi-
ble through conjunction of predicates. For example,
“there is a red cat” is parsed as
∃x Cat(x) ∧ Red(x) (1)
Relations in the scene are modelled in terms of
event semantics (Parsons, 1991). A relation is mod-
elled as an existence of an event e with a landmark lm
representing the object of the event, and a trajector tr
representing the subject. We denote the relation and
the landmark as a single predicate, e.g Left of(e, x)
indicates a relation “left of” with object x as the land-
mark. We denote the trajector of a relation as tr(e,y).
For example, “a dog left of a cat” is parsed as
∃e∃x∃y Left of(e,x) ∧ Cat(x)
∧tr(e,y) ∧ Dog(y)
(2)
First-order logic allows us to use conjunctions
(“and”) and disjunctions (“or”) to parse arbitrar-
ily complex sentences. This includes conjunc-
tion of attributes (“the dog is big and black”) and re-
lations (“the dog is next to the cat and the person”).
We omit the logical representations of these examples
for brevity.
We explicitly model response maps of particu-
lar queries as partial applications of expressions in
lambda calculus. Formally, existence of an object of a
particular class is represented by an object-class func-
tion O:
λ Q ∃z O(z) ∧ Q(z) (3)
In the case of a subject of a relation, we add the tr
predicate as explained above:
λ Q ∃z ∃e O(z) ∧tr(e,z) ∧ Q(z) (4)
This allows response maps for attributes and rela-
tions to be modelled as lambda expressions. An at-
tribute is represented by an attribute function A:
λ y A(y) (5)
and a relation by a relation function R:
λ x λ y ∃ e R(e,x) (6)
where x and y represent objects, and e represents a
particular event, which is used to group together the
landmark and the trajector of a particular relation.
Each word in the vocabulary of the model will
take the form of an expression in Equations 3, 4, 5
and 6. In this logic, we use terms to represent either
objects or events. Therefore, the model only requires
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
148

Figure 2: Example of evaluating relation queries on an image. Left: An image from the COCO dataset. Centre: Evaluating
“left of the cat” Right: Evaluating “left of the dog”. Response maps are overlaid with the original image for clarity.
definitions for all O, A and R predicates, which can
be supplied either a priori, or learned by the model.
For this paper, we consider O as supplied a priori, and
focus on the learning of attributes and relations.
3.2 Objects
We model a term o in first-order logic by a point
in our feature space p
p
p
o
. Conceptually, an object o,
represented as a term in the logic, is obtained by
a field in our model, where the response value for
each pixel p indicates the confidence for the partic-
ipation of the pixel to the particular object. Common
representations for obtaining such fields are bound-
ing boxes and segmentation masks obtained from an
appropriate detector. This allows us to describe not
only object classes obtained from an object detector,
e.g “cat”, but arbitrarily complex noun phrases, i.e
“the red cat”, “the red cat under the clock”.
In order to tie the object representation to lan-
guage, we collapse an object to a single point p
p
p
o
, by
considering the object field F
o
. For each feature di-
mension D
i
, the value of the object point is the mean
value of D
i
weighted by the object field. This rep-
resents that object regions of lower confidence should
not contribute to the value, and non-object regions (i.e
zero-valued pixels in F
o
) should not contribute at all.
This operation is equivalent to taking the matrix
inner product between F
o
and D
i
. Therefore, p
p
p
o
is a
vector containing the matrix inner product between F
o
and each feature dimension:
p
p
p
o
= (< F
o
,D
1
>,< F
o
,D
2
>,... < F
o
,D
n
>) (7)
This product then represents the weighted mean
feature of the object – mean position, mean colour,
mean texture, etc. which form the basis for calculating
attributes and relations as described previously. Here
we note that this mean representation of an object is
not used to detect or classify objects, but to provide a
reference in our feature space to identify a particular
object in the scene. This reference is then used as
input to other functions operating on the space.
3.3 Attributes
An attribute is defined by an attribute function A
which operates on a point in the feature space:
A : R
n
→ R , (8)
where n is the dimensionality of the feature space. As
shown in Equation 5, this conveniently allows eval-
uation of an attribute on a single object represented
by mean value p
p
p
o
. Note that we can also apply the
attribute function to the entire h × w image at once,
which will produce a field F ∈ R
h×w
:
A : R
n×h×w
→ R
h×w
. (9)
Importantly, this means that evaluating an attribute on
an image produces a field in the space. Figure 1 shows
application of different attributes on entire images.
This formalism leads to, a flexible model which
allows for attributes originating either from external
knowledge, or from any employed learning technique.
We describe a simple learning model for attributes in
Section 4.3.
In addition, this formalism allows for two differ-
ent types of evaluation of an attribute; the application
of an attribute on an object p
p
p
o
, as above, and the par-
tial evaluation of the attribute, without a participating
object, on a particular scene. Extracting features from
an image maps each pixel to a feature vector p
p
p, which
allows the evaluation of an attribute function on an
image to create a response map, as shown in Figure 1.
The partial application of an attribute allows
for top-down processing of a scene, enabling the
model to drive its attention to a particular region
of an image (e.g. “dark” or “smooth” regions).
It also allows evaluating vague statements such as
“red left of green” without having to detect objects
and process them in turn, which is done in a bottom-
up manner. In these cases, we convert the field repre-
sentation of the attributes (i.e “red”) into an object as
described in Section 3.2.
Finally, to determine whether a particular object
has attribute A, we use the decision function:
Few-shot Linguistic Grounding of Visual Attributes and Relations using Gaussian Kernels
149

t(p
p
p
o
;A) =
true, if A(p
p
p
o
) > T
false, otherwise.
(10)
where T is a variable detection threshold.
3.4 Relations
Following Equation 6, a relation naturally extends an
attribute by producing a field given two points instead
of one. In order to describe relations, we augment the
feature space with respect to a fixed point lm
lm
lm repre-
senting the landmark of the relation. For each dimen-
sion D, we consider a additional dimensions. For this
paper, we use:
D
∆
(lm
lm
lm; D) = D −lm
lm
lm
D
D
∆
2
(lm
lm
lm; D) = (D −lm
lm
lm
D
)
2
(11)
Formally, for a additional dimensions for each di-
mension, a relation can be represented as:
R : R
a·n
× R
n
→ R (12)
A property shared with attributes is the ability to
partially apply relations. Provided two objects, the
relation function can provide a value representing the
intensity of the relation. With only a single object, the
relation can be applied to give a value for each pixel in
the scene, creating response maps such as in Figures 2
and 4.
This concept can be illustrated in Figure 2. If one
of the feature dimensions is the x coordinate of the
object represented by p
p
p
o
, then the two relative dimen-
sions in Eq.11 will be the horizontal offset of p
p
p
o
from
the landmark and the square of the horizontal offset,
respectively. The horizontal offset makes it trivial to
learn the relation “left-of” with respect to the dog
and the cat as landmarks. Adding the y coordinate
to the features would also add the corresponding ver-
tical offset and its square, allowing us to easily learn
“above”, “below”, as well as distance-based concepts
such as “near” or “far”.
3.5 Learning Approach
In this paper, we model each attribute and relation
function as a Gaussian distribution in a shared feature
space. This follows the idea of representing concepts
as convex regions in a conceptual space (G
¨
ardenfors,
2000). We use this model instead of a deep network
to demonstrate that the power of our model lies in the
formalism used to sequentially parse the scene, and
not the complexity of the architecture. However, there
is nothing preventing the use of powerful learned fea-
tures in the future. We use a set of domains, each of
which containing a number of dimensions. The set of
domains used in this paper are as follows:
• the pixel colour in the CIELAB colour space,
• horizontal and vertical offset (in pixels) from im-
age centre,
• the magnitude and angle of optical flow, and
• the responses of oriented Gabor filters covering a
range of sizes and orientations.
In addition, we use the difference and square differ-
ence from a particular landmark as augmented fea-
tures when considering relations, as described in Sec-
tion 3.4.
The features we use are well-established in the
field of computer vision and all map reasonably well
to semantic concepts describing colours, spatial rela-
tions, motion, and texture. When operating on still
images, the dimensions of optical flow are fixed at
zero. Our learning approach described below will
learn to ignore dimensions that are not useful for rep-
resenting specific attributes and relations.
In all cases, we model both the word W and en-
vironment E as two multivariate normal distributions
over the feature space:
W ∼ N (µ
w
,Σ
w
)
E ∼ N (µ
e
,Σ
e
)
(13)
In this paper we assume independence of the features
in the space, meaning Σ is diagonal, but this is not
required by the model.
For a training example, we split the image into
two sets of points by considering the participating ob-
ject. For example, objects obtained by a set of pixels
B from a bounding box produce a field using the func-
tion:
F(p; B) =
1, if p ∈ B
0, otherwise.
(14)
We assign the points of the object to W and the re-
mainder to E. The environment samples are taken
from any annotation that does not define the word and
allows us to learn without annotating negative exam-
ples.
We then construct a field function F which accepts
a single point p
p
p:
F(p
p
p;W, E) =
1
k
exp
"
∑
i
|p
p
p
i
−µ
µ
µ
i
|
σ
σ
σ
i
D
KL
(W
i
,E
i
)
#
2
(15)
where D
KL
represents the KL-divergence between
two normal distributions W
i
and E
i
representing the
distributions for feature dimension i as:
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
150

Feature Extraction
“the frisbee right of the dog”
Landmark localization
“the frisbee right of the dog”
Relation application
“the frisbee right of the dog”
Trajector localization
“ the frisbee right of the dog”
Figure 3: Example of the evaluation process for a single relation “”the frisbee right of the dog”. First, the model detects
the appropriate landmark “dog”, and generates the response map for the relation “right of” using the detected object as the
landmark. Finally, the model detects the trajector “frisbee” and calculates the mean value of the response map of the bounding
box.
Figure 4: Examples of attention maps from the VRD dataset. Left: “on the bus” . Right: “wears the pants”. The maps show
the partial application of the relation, i.e “on” to the landmark, i.e “the bus” on the left. Calculation of the relation uses the
mean response of the bounding box of the trajector, i.e “wheel”.
D
KL
(P,Q) = log
σ
2
σ
1
+
σ
2
1
+ (µ
1
− µ
2
)
2
2σ
2
2
−
1
2
(16)
and k normalizes the value in the range [0,1).
3.5.1 Learning Attributes
A training example for an attribute consists of a set
of points obtained either from a bounding box of an
object or a segmentation mask, and a label represent-
ing the name of the attribute. The model then updates
its knowledge base and calculates the new Gaussian
A for the attribute, as discussed in Section 3.3. The
process is shown in Algorithm 1. Line 1 extracts the
image features to assign a feature vector to each pixel
in the image, collectively defined as P. Lines 2 and 3
split these vectors into the feature vectors of the ob-
ject and the environment respectively. Finally, lines 4
to 7 add the data to the model and retrain any words
with the updated data.
3.5.2 Learning Relations
For a relation, two sets of points are needed, for the
landmark and the trajector. The model then calculates
the augmented features relative to the landmark, as
discussed in Section 3.4, and updates its knowledge
base, as shown in Algorithm 2. In this case, the di-
Algorithm 1: Training an attribute.
Input: Labelled image I with object o
Input: Word w (attribute name)
1 P ← extract features(I)
2 P
o
← get object points(P, o)
3 P
e
← P − P
o
4 add samples(w, P
o
)
5 add environment samples(P
e
)
6 for w in lexicon do
7 recalculate distribution(w)
mensionality of the feature space used is a × n, where
a is the number of feature augmentations and n is
the size of the original feature space. As shown, this
method allows for the insertion of an arbitrary num-
bers of words in the lexicon, without affecting the
existing words. In addition, it allows attributes and
relations to be stored with different dimensionalities,
while being derived from the same base feature space.
4 EVALUATION
We evaluate our model on the predicate detection task
of the Visual Relationship Dataset (VRD) (Lu et al.,
2016). Contrary to most modern approaches which
Few-shot Linguistic Grounding of Visual Attributes and Relations using Gaussian Kernels
151
Algorithm 2: Training a relation.
Input: Labelled image I with landmark lm
and trajector tr
Input: Word w (relation name)
1 P ← extract features(I, lm)
// P contains augmented features
2 P
tr
← get object points(P, tr)
3 P
e
← P − P
tr
4 add samples(w, P
tr
)
5 add environment samples(P
e
)
6 for w in lexicon do
7 recalculate distribution(w)
use the entire training set, we randomly select a num-
ber of examples for each predicate. We demonstrate
that our model can still outperform the state-of-the-
art in the predicate detection task. In addition, we are
able to also outperform in the zero-shot portion of the
test set, which means a relation was observed before,
but the subject-predicate-object triple it is being tested
on was not. We also show qualitative querying on the
COCO dataset to demonstrate the generalizability of
the model. Finally, we demonstrate learning of simple
attributes by querying images from a search engine.
4.1 Relationship Detection on VRD
The VRD predicate detection task tries to learn and
predict the predicate between two annotated objects in
a scene (represented by ground truth bounding boxes).
We focus on this task as our model is not tied to a par-
ticular object detection model, as explained in Sec-
tion 3.2. Most approaches use a train/test split of
4000/1000 images, which roughly translates to 30000
triples in the training set, and 7000 in the test set. We
compare our model to a number of methods: 1. LP
introduces the dataset, and uses a language module
utilizing word embeddings along with visual features.
LP-V is a diagnostic using only visual features (Lu
et al., 2016) 2. DR-Net utilizes spatial configurations,
as well as a probabilistic model for each triplet (Dai
et al., 2017) 3. LK uses external linguistic knowledge
to better predict probabilities of each predicate given
the subject and object (Yu et al., 2017). 4. SR fuses all
features and uses structural ranking loss (Liang et al.,
2017). 5. NL uses a bi-directional RNN and relative
spatial features of the subject-object pair to predict
predicates (Liao et al., 2019).
Following standard procedure for the predicate
detection task, we use the ground-truth bounding
boxes of the subject and object without the use of an
object detector.
Table 1 shows the results. We significantly outper-
form traditional approaches using a training set an or-
0
5
10
15
20
0.7
0.8
0.9
Number of samples (n)
Recall@50
10 20 30 40
50
0
0.2
0.4
0.6
0.8
1
N
Recall@N
n = 5
n = 20
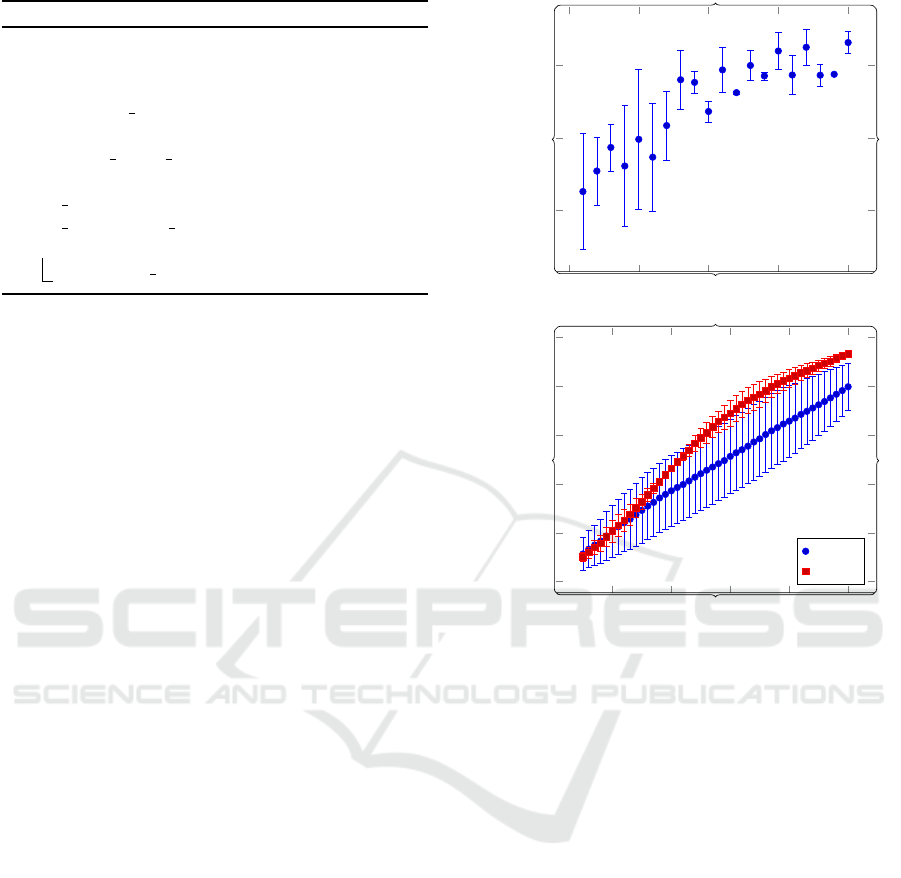
Figure 5: Left: Graph of increasing sample size n against
mean Recall@50 on the VRD test set, with error bars.
Right: Graph of the effect of increasing sample size n
against mean Recall@N, with error bars.
der of magnitude smaller (n = 8 examples for each re-
lation, with some relations having fewer annotated ex-
amples in the training set). In addition, we are able to
achieve state-of-the-art on the subset of unseen triples
in the VRD test set. This demonstrates that our model
generalizes well, since we learn on very few examples
yet achieve excellent results in the zero-shot subset.
Figure 5 shows the effect of increasing sample size
for each relation on the VRD test set. Notably, the
number of samples represents the maximum number,
as some relations have ≤ 20 training examples. As
expected, lower sample sizes show very high variance
due to the random nature of the selection, as well as
the fact that the model might not be able to learn some
relations from a single example, such as symmetric
relations. However, the variance is quickly reduced at
higher sample sizes. In addition, Recall@N is shown
for sample sizes n = 5 and n = 20. The model ex-
hibits much higher variance at a lower number of sam-
ples, with a significant increase in performance as n
increases.
We attribute the success of the model to two fac-
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
152
Table 1: Results on predicate and relationship detection in the VRD (Lu et al., 2016). We compare our model with similar
results discussed in Section 4.1. Results are compared, where applicable, to the zero-shot learning scenario.
Predicate Detection
Comparison Entire set R@50 Zero-shot R@50 Training size
LP-V (Lu et al., 2016) 7.11 - 30000
LP (Lu et al., 2016) 47.87 8.45 30000
DR-Net (Dai et al., 2017) 80.87 - 30000
LK (Yu et al., 2017) 85.64 54.20 30000
SR (Liang et al., 2018) 86.01 60.90 30000
NL (Liao et al., 2019) 84.39 80.75 30000
Ours 93.67 89.55 560
tors. First, the model only considers objects as points
in the feature space, as described in Section 3.2, and
so is able to easily generalize spatial relations be-
tween triples, either seen or unseen. As described, we
use the feature vector of the object p
p
p
o
to effectively
translate the feature space. This allows us to easily
adapt to symmetric and anti-symmetric relations, as
we learn the average translation of the space by con-
sidering the objects in our knowledge base. This also
helps to explain why our model achieves a very high
recall at only a small number of examples, as shown
in 5.
Secondly, we are able to keep the predicates inde-
pendent of each other, since we learn a different dis-
tribution for each. This allows us to extend the model
to an arbitrary number of predicates without affecting
the performance of other predicates, which is particu-
larly helpful when considering learning with very few
examples.
4.2 Image Retrieval
In order to further demonstrate the generalizability
of our model, we use the COCO dataset to carry
out content-based image retrieval. We use the same
model trained on the VRD dataset as described in
Section 4.1. In addition, we use an off-the-shelf pre-
trained YOLO object detector (Redmon and Farhadi,
2018) to provide bounding boxes. We are able to
query the COCO dataset for images containing a par-
ticular relation, as shown in Figure 6. As shown, the
model then ranks images in the dataset according to
the confidence in the existence of the relation. We
demonstrate the strength of the model to handle com-
plex language by combining two queries with “and”.
As discussed in Section 3.1, we use a simple gram-
mar to parse a sentence in natural language and con-
vert it into a series of operations on the feature space,
as shown in Figure 3.
4.3 Online Attribute Learning
In order to demonstrate the learning of attributes, we
use the Flickr API to obtain a small set of weakly-
annotated training images for a variety of attributes.
Some examples are shown in Figures 1 and 7. We
treat the centre of the image as an object possessing
the desired property, by treating the whole image as
an object o using a Gaussian centered on the image as
a response field. This bypasses the need for an object
detector, and leverages the fact that, on average, an
attribute will be most represented in the centre of the
image.
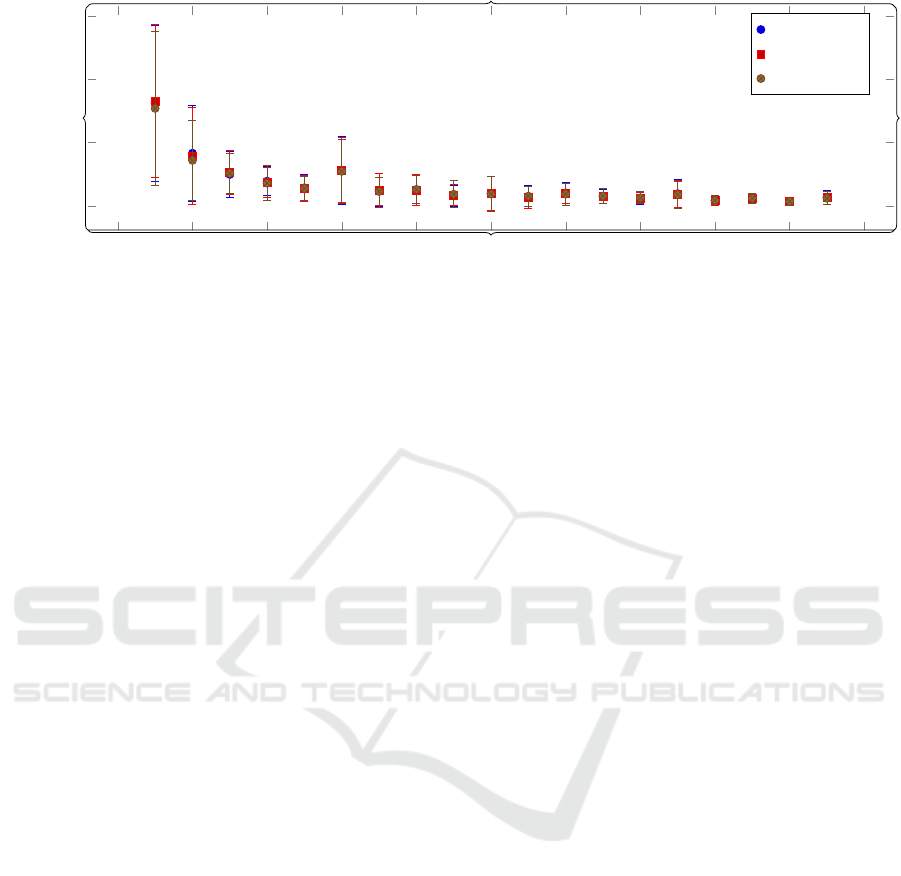
Figure 8 shows the rate of convergence of our
model, by considering the shift in the centre of
the attribute distribution that each additional sample
causes. As expected, our model shows the high-
est change and variance at the first additional sam-
ple, while converging at a very low sample number
(n > 10).
We also experimented with learning the same at-
tributes by scaling down original images before train-
ing. Figure 8 shows the average resolution of the
training data. We scale the input data by a factor
of 4 and 16. As shown, the model is able to con-
verge just as fast with orders of magnitude fewer data
points, suggesting that the model learns not from an
abundance of similar points, but by slowly differenti-
ating the features of the centre of the images possess-
ing the attribute, from the rest of the environment, as
discussed in Section 3.5.
Few-shot Linguistic Grounding of Visual Attributes and Relations using Gaussian Kernels
153

“dog near frisbee and near person”
“person right of cat and left of dog”
“person on bed and below clock”
Figure 6: Examples of content-based image retrieval on the COCO dataset. The model trained on VRD is presented a textual
query, and ranks the images in the dataset by the confidence of the statement being true in the image. The top 5 results for
each query are shown, sorted by confidence from left to right.
Figure 7: Examples of attention maps from the Flickr API.
Top: “purple” Bottom: “green”.
5 DISCUSSION
5.1 Learning approach Advantages
One of the main advantages of our model is its flex-
ibility in the vocabulary employed. Since the model
does not have a fixed lexicon, it can learn either from a
large annotated dataset or in an online manner. When-
ever it encounters a word with no model (i.e. no
Gaussian function to link it to the feature space), it
can look for annotated examples which include that
word. When using a dataset, unlike neural network
approaches, our model does not iterate over the data
in training epochs, but obtains new vocabulary or re-
fines its existing knowledge base by considering each
data point in the training set in sequence.
Another major benefit of this approach is the lack
of explicit feature selection. Traditional neural net-
work models rely on back-propagation to emphasize
the importance of a particular feature. In contrast, our
model will naturally learn that only a few of the fea-
ture dimensions will be important for a particular at-
tribute (e.g colour for ’green’, but position for ’left’)
by considering the variance of the strength of the fea-
ture in the training data, as discussed in Section 3.5.
This property will exhibit a lower variance (i.e higher
concentration of data points) in the salient feature di-
mensions, and a higher variance in the non-salient
features, relative to the environment.
Our approach can also distinguish between sym-
metric and anti-symmetric relations. Most visual re-
lations between objects can be described as sym-
metric “A close to B” =⇒ “B close to A” or anti-
symmetric “A left of B” =⇒ ¬“B left of A”. For
example, the symmetric relation “close to” exhibits
a spread of values across the regular horizontal and
vertical dimensions, as objects may be close on both
sides, but a higher concentration of values in the re-
spective squared dimensions, since objects close to
each other are usually a fixed distance apart.
5.2 Introspection and Meta-querying
Due to the statistical nature of our model, and the fact
that our feature dimensions are relatively simple, we
are able to answer questions about learned linguistic
terms. As mentioned in Section 3.3, we use the KL-
Divergence in order to select the features in our space
which exhibit the most information gain relative to
the environment. This, combined with the fact that
each predicate is learned independently, naturally al-
lows the model to describe which dimension is most
salient for each predicate, as shown in Figure 9. This
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
154
0 2 4
6
8 10 12 14
16
18 20
0
0.1
0.2
0.3
Sample number (#)
∆~µ
469 × 376
118 × 95
30 × 24
Figure 8: Graph of average deviation in the attribute distribution mean~µ against sample number for n = 5 attributes, for various
image resolutions. Attributes are learned as described in Section 4.3. The graph shows the convergence of the (averaged) mean
of the distributions as more data is added to the model’s knowledge base.
red is related to ’dim_2’ :
{’dim_1’: 0.117, ’dim_2’: 0.861,
’dim_3’: 0.378}
purple is related to ’dim_3’ :
{’dim_1’: 0.0679, ’dim_2’: 0.365,
’dim_3’: 0.534}
yellow is related to ’dim_3’ :
{’dim_1’: 0.335, ’dim_2’: 0.387,
’dim_3’: 1.008}
Figure 9: Example output from learned concepts from im-
ages queried from a search engine, discussed in Section 4.3.
Dimensions 1 to 3 represent the components of LAB space,
in order.
is particularly powerful when feature dimensions cor-
relate well with semantic concepts as they do in our
case: e.g. the L dimension of the CIELAB space cor-
responds to intensity/lightness. This allows the eval-
uation of simple queries related to learned attributes
such as ’what is dark?’ with generated answers such
as ’dark is related to lightness’. This can be evalu-
ated at any time, using the accumulated knowledge of
the model. This can either be a collection of images,
when applied to a general task such as a dataset, or
a changing environment over time, when applied to a
real-world scenario such as a surveillance camera.
6 CONCLUSION
We have presented a framework for grounding of at-
tributes and visual relations and a model built on this
framework. Our model allows the learning of at-
tributes and relations in the same way, using Gaussian
distributions in a feature space of common image fea-
tures. Importantly, we use a single model for learn-
ing both attributes and relations. The novelty of our
contribution does not come from the use of Gaussian
models, but from our approach to parsing queries and
sequentially processing the scene. We use the same
formalism for grounding objects, attributes, and rela-
tions, in contrast to most current work on relation and
attribute learning.
Our system outperforms the state-of-the-art on the
task of predicate detection on the VRD dataset, and
generalizes well in a zero-shot learning task. In ad-
dition, we show that our approach is able to learn
attributes in an online manner, by using images re-
trieved by a search engine. We feel that these are
promising early results for our formalism and plan to
explore deep learning of conceptual spaces to improve
performance in the future.
ACKNOWLEDGEMENTS
The Titan Xp GPU used for this research was donated
by the NVIDIA Corporation.
REFERENCES
Andreas, J., Rohrbach, M., Darrell, T., and Klein, D.
(2016). Learning to compose neural networks for
question answering. In NAACL HLT 2016, The 2016
Conference of the North American Chapter of the As-
sociation for Computational Linguistics: Human Lan-
guage Technologies, pages 1545–1554.
Bisk, Y., Holtzman, A., Thomason, J., Andreas, J., Ben-
gio, Y., Chai, J., Lapata, M., Lazaridou, A., May, J.,
Nisnevich, A., Pinto, N., and Turian, J. P. (2020). Ex-
perience grounds language. ArXiv, abs/2004.10151.
Carey, S. and Bartlett, E. (1978). Acquiring a single new
word.
Few-shot Linguistic Grounding of Visual Attributes and Relations using Gaussian Kernels
155

Chen, Z., Fu, Y., Zhang, Y., Jiang, Y., Xue, X., and Sigal,
L. (2019). Multi-level semantic feature augmentation
for one-shot learning. IEEE Transactions on Image
Processing, pages 1–1.
Dai, B., Zhang, Y., and Lin, D. (2017). Detecting visual
relationships with deep relational networks. In Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition (CVPR).
Gorniak, P. and Roy, D. (2004). Grounded semantic com-
position for visual scenes. The Journal of Artificial
Intelligence Research, 21:429–470.
G
¨
ardenfors, P. (2000). Conceptual Spaces: The Geometry
of Thought. MIT Press, Cambridge, MA, USA.
He, X., Qiao, P., Dou, Y., and Niu, X. (2019). Spatial atten-
tion network for few-shot learning. In ICANN 2019:
Deep Learning, pages 567–578, Cham. Springer In-
ternational Publishing.
Hotz, L., Neumann, B., Terzi
´
c, K., and
ˇ
Sochman, J.
(2007). Feedback between low-level and high-level
image processing. Technical Report Report FBI-HH-
B-278/07, University of Hamburg, Hamburg.
Hudson, D. A. and Manning, C. D. (2019). Gqa: A new
dataset for real-world visual reasoning and composi-
tional question answering. Conference on Computer
Vision and Pattern Recognition (CVPR).
Jin, X., Du, J., Sadhu, A., Nevatia, R., and Ren, X.
(2020). Visually grounded continual learning of com-
positional phrases.
Johnson, J., Hariharan, B., Van Der Maaten, L., Hoffman,
J., Fei-Fei, L., Zitnick, C. L., and Girshick, R. (2017).
Inferring and executing programs for visual reasoning.
In 2017 IEEE International Conference on Computer
Vision (ICCV), pages 3008–3017.
Karlinsky, L., Shtok, J., Harary, S., Schwartz, E., Aides, A.,
Feris, R., Giryes, R., and Bronstein, A. M. (2019).
Repmet: Representative-based metric learning for
classification and few-shot object detection. In Pro-
ceedings of the IEEE/CVF Conference on Computer
Vision and Pattern Recognition (CVPR).
Kovashka, A., Parikh, D., and Grauman, K. (2015). Whit-
tlesearch: Interactive image search with relative at-
tribute feedback. In International Journal of Com-
puter Vision (IJCV).
Kreutzmann, A., Terzi
´
c, K., and Neumann, B. (2009).
Context-aware classification for incremental scene in-
terpretation. In Workshop on Use of Context in Vision
Processing, Boston.
Krishna, R., Chami, I., Bernstein, M., and Fei-Fei, L.
(2018). Referring relationships. In IEEE Conference
on Computer Vision and Pattern Recognition.
Liang, K., Guo, Y., Chang, H., and Chen, X. (2018). Visual
relationship detection with deep structural ranking. In
AAAI.
Liang, X., Lee, L., and Xing, E. P. (2017). Deep variation-
structured reinforcement learning for visual relation-
ship and attribute detection. In CVPR, pages 4408–
4417.
Liao, W., Rosenhahn, B., Shuai, L., and Ying Yang, M.
(2019). Natural language guided visual relationship
detection. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR) Workshops.
Lu, C., Krishna, R., Bernstein, M., and Fei-Fei, L. (2016).
Visual relationship detection with language priors. In
ECCV.
Luo, R. and Shakhnarovich, G. (2017). Comprehension-
guided referring expressions. In Proceedings of the
IEEE Conference on Computer Vision and Pattern
Recognition (CVPR).
Neumann, B. and Terzi
´
c, K. (2010). Context-based proba-
bilistic scene interpretation. In Proc. Third IFIP Int.
Conf. on Artificial Intelligence in Theory and Prac-
tice, pages 155–164, Brisbane.
Parsons, T. (1991). Events in the Semantics of English.
Peyre, J., Laptev, I., Schmid, C., and Sivic, J. (2017).
Weakly-supervised learning of visual relations. In
ICCV.
Peyre, J., Laptev, I., Schmid, C., and Sivic, J. (2019). De-
tecting unseen visual relations using analogies. In The
IEEE International Conference on Computer Vision
(ICCV).
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. arXiv.
Richter, M., Lins, J., Schneegans, S., and Sch
¨
oner, G.
(2014). A neural dynamic architecture resolves
phrases about spatial relations in visual scenes. In
Artificial Neural Networks and Machine Learning –
ICANN 2014, pages 201–208.
Sohn, K. (2016). Improved deep metric learning with multi-
class n-pair loss objective. In NIPS.
Sur
´
ıs, D., Epstein, D., Ji, H., Chang, S.-F., and Vondrick, C.
(2019). Learning to learn words from visual scenes.
arXiv preprint arXiv:1911.11237.
Xu, F. and Tenenbaum, J. B. (2000). Word learning as
bayesian inference. In In Proceedings of the 22nd
Annual Conference of the Cognitive Science Society,
pages 517–522. Erlbaum.
Yu, R., Li, A., Morariu, V. I., and Davis, L. S. (2017). Vi-
sual relationship detection with internal and external
linguistic knowledge distillation. In 2017 IEEE In-
ternational Conference on Computer Vision (ICCV),
pages 1068–1076.
Zhang, J., Zhao, C., Ni, B., Xu, M., and Yang, X. (2019).
Variational few-shot learning. In The IEEE Interna-
tional Conference on Computer Vision (ICCV).
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
156
