
On-demand Robotic Fleet Routing in Capacitated Networks with
Time-varying Transportation Demand
Martin Schaefer
a
, Michal
ˇ
C
´
ap
b
, David Fiedler
c
and Ji
ˇ
r
´
ı Vok
ˇ
r
´
ınek
d
Artificial Intelligence Center, Computer Science Department, FEE, Czech Technical University in Prague, Czech Republic
Keywords:
Multi-robot Systems, Fleet Routing, Coordination, Mobility-on-Demand System.
Abstract:
In large-scale automated mobility-on-demand systems, the fleet manager is able to assign routes to individual
automated vehicles in a way that minimizes formation of congestion. We formalize the problem of on-demand
fleet routing in capacitated networks with time-varying demand. We demonstrate the limits of application
of the steady-state flows approach in systems with time-varying demand and formulate a linear program to
compute congestion-free routes for the vehicles in capacitated networks under time-varying demand. We
evaluate the proposed approach in the simulation of a simplified, but characteristic illustrative example. The
experiment reveals that the proposed routing approach can route 42% more traffic in congestion-free regime
than the steady-state flow approach through the same network.
1 INTRODUCTION
Almost all world’s metropolitan areas are plagued
with traffic congestion that emerges when the number
of vehicles attempting to travel along a specific road
segment exceeds its capacity. Such a failure to ensure
free traffic flow in an urban road network inevitably
results in significant travel delays and higher emis-
sion of air pollutants. The levels of traffic congestion
can be reduced either by increasing the capacity of
the roads or by selecting routes for individual vehi-
cles that use the available capacity more efficiently.
Today, on-line navigation tools, such as Google
Maps or Waze, collect and share real-time data about
travel delays to compute and recommend the fastest
route to each of their users. The situation where ev-
ery driver is perfectly informed about the delays and
follows a route that optimizes its arrival time is de-
scribed by so-called user equilibrium traffic assign-
ment. On the other hand, the situation, where the
individual vehicles are centrally assigned routes that
optimize average travel time is described by so-called
system optimal traffic assignment. In practical terms,
the system-optimal assignment of traffic to road net-
work was considered hard to achieve, because some
a
https://orcid.org/0000-0003-0578-3182
b
https://orcid.org/0000-0001-6450-7976
c
https://orcid.org/0000-0001-5374-1089
d
https://orcid.org/0000-0003-3294-3030
of the drivers would have to voluntarily ”sacrifice”
and follow longer routes to improve the overall sys-
tem performance.
Recently, the self-driving technology emerged as
a possible enabler for low-cost on-demand urban mo-
bility. In fact, it has been argued (Spieser et al.,
2014) that a fleet of shared automated vehicles is ca-
pable of providing personal point-to-point mobility at
lower-cost than driving a privately-owned car. Such
automated mobility-on-demand (MoD) systems con-
sists of a large, centrally controlled fleet of shared
self-driving vehicles that jointly service transporta-
tion needs of the users of the system. In contrast to
conventional traffic, the routes for the robotic vehi-
cles of the system can be coordinated centrally and
thus the system-optimal assignment of routes to the
road network can be, in principle, achieved. In re-
sult, such centrally-routed mobility-on-demand sys-
tems hold promise to improve the efficiency of uti-
lization of existing road infrastructure, i.e., the sys-
tem serves more transportation demand and at the
same reduces or even completely prevents formation
of congestion. In order to evaluate the potential of
system-optimal fleet routing, it is important to under-
stand how to compute the system-optimal routes for
the fleet.
In the system-optimal on-demand fleet
congestion-free routing problem, we seek coor-
dinated routes for on-demand vehicles that serve
the passengers’ transportation requests such that the
Schaefer, M.,
ˇ
Cáp, M., Fiedler, D. and Vok
ˇ
rínek, J.
On-demand Robotic Fleet Routing in Capacitated Networks with Time-varying Transportation Demand.
DOI: 10.5220/0010261009070915
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 2, pages 907-915
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
907

capacities of the road segments are not exceeded
and the average travel delay is minimized. Note
that in contrast to the problem of system-optimal
route assignment to privately-owned vehicles, where
each passenger is tied to its own vehicle, in robotic
fleet routing problem we can also optimize over the
possible assignments of passengers (transportation
requests) to individual shared robotic vehicles.
Traditionally, the research field of vehicle rout-
ing problems (VRP) (Pillac et al., 2013) has focused
on finding the optimal assignment of transportation
requests to vehicles in a fleet. Yet, fleets modeled
in VRPs are typically small and thus the road ca-
pacity constraints are usually not modeled. How-
ever, when the controlled fleet consist of tens of
thousands of vehicles, the capacity of the underly-
ing road network must be considered. This led to
emergence to the study of the problem of on-demand
fleet routing in capacitated networks. In the seminal
work of (Zhang et al., 2016a) and then in (Schaefer
et al., 2019), (Solovey et al., 2019), and (Wollenstein-
Betech et al., 2020), the on-demand system is mod-
eled in the framework of network flows and analyzed
under the steady-state assumption, i.e., the system-
optimal routes are computed while the intensity of
transportation demand is time-invariant.
However, one of the defining properties of ur-
ban transportation is that the transportation demand
is highly time-dependent, both in its intensity and in
its structure. Indeed, a typical urban passenger trans-
portation demand is characterized by a morning and
an evening peak: in the morning, the majority of pas-
sengers desires to travel from residential areas to busi-
ness areas, while in the evening, the transportation de-
mand is oriented in the opposite direction.
In this paper, we analyze the applicability of the
steady-state approach to fleet routing in periods when
the transportation demand changes in time, e.g., dur-
ing the onset of morning peak. We demonstrate that
the naive strategy of steady-state approach is lim-
ited and propose an extended model that accounts for
time-varying demand and discuss research challenges
that need to be tackled to allow system optimal fleet
route planning in urban networks with time-varying
transportation demand of practical sizes. In the simu-
lated experiments with congestion model, we demon-
strate the dominance of the proposed approach over
the steady-state one in presence of the time-varying
transportation demand. We show, that the proposed
method can find congestion-free routes for by 42%
more demand than the steady-state approach in the
same illustrative road network.
2 PROBLEM DESCRIPTION
In this section, we state the on-demand fleet rout-
ing in capacitated network problem (OFRCNP). Con-
sider an mobility-on-demand system consisting of a
fleet of single-occupancy vehicles that jointly serve a
point-to-point transportation requests over a road net-
work. We assume that there is no other traffic, i.e, the
road network is exclusively occupied by the centrally-
controlled fleet.
The road network is modeled by a directed graph,
where the nodes represent junctions or parking areas
and the edges represent road links. The road links
have time-invariant capacities describing the maximal
flow rate along the link measured in the number of ve-
hicles per time unit. We assume that if the flow over
the link is below its capacity, the congestion will not
occur and consequently the transit times over the link
is time-invariant and deterministically known. The
flow over the link is strictly caped by the capacity and
any exceeding flow is not allowed.
We adopt a common assumption for the road net-
works that the nodes are without storage, i.e., we de-
sire a vehicle to circulate in the network and to pick-
up passengers by visiting the pick-up nodes without
waiting there. Subsequently, the vehicle transports the
passenger to the drop-off node from where the vehicle
immediately continue to another passenger’s pick-up
node. In other words, the vehicles are not allowed to
accumulate in any node, except in a set of pre-defined
depots that model high capacity parking lots.
The transportation demand is deterministic and
known apriori. It is described by a collection of trans-
portation requests, each specified by the origin node,
the destination node, the earliest pick-up time, and
the latest drop-off time. We assume the passengers
are willing to wait for pick-up as long as they are
dropped-off before the drop-off deadline. The num-
ber of travel requests and a distribution of origins and
destination can vary over time.
The goal is to plan a route for each of the fleet
vehicles through the road network so that each trans-
portation request is serviced within provided time
constraints and at the same time ensure that link ca-
pacities are not exceeded. The optimization criterion
is the cost of fleet operation, i.e., the total travelling
time by the vehicles in the fleet. The quality of service
is enforced by the drop-off time constraint of each
transportation request.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
908

3 NETWORK FLOW MODEL
We observe that OFRCNP is a multiple single-
occupancy vehicle routing problem with pickup and
deliveries, time windows and additional constraints
on maximal allowed vehicle flow over road links. We
note that the above problem is a generalization of the
single vehicle with unit-occupancy pickup and deliv-
ery problem (Berbeglia et al., 2007), commonly re-
ferred to as a Stacker Crane Problem, which is known
to be NP-hard (Frederickson et al., 1976).
Moreover, the fleets can easily contain tens of
thousands of vehicles. For example, an mobility-on-
demand system sufficient to serve the existing trans-
portation demand in Prague with more than million
inhabitants is estimated to require 60 000 of vehicles
(Fiedler et al., 2017). Such fleet sizes are out of reach
even for most heuristic VRP approaches.
One way to mitigate the complexity is to aggregate
the transportation requests between the same origin
and destination into a demand flow and vehicles that
serve this demand flow into a vehicle flow. The prob-
lem can be then cast as a min-cost multi-commodity
flow problem. This problem is in general still in-
tractable, but the complexity can be eliminated with
additional assumptions.
Firstly, due to indivisibility of individual vehicles
the flow of vehicles is integral (it takes integer val-
ues), so the problem in consideration is in fact an inte-
ger multi-commodity flow problem, which is however
NP-hard (Even et al., 1975). The relaxation to frac-
tional (real-valued) flows is convenient as the frac-
tional multi-commodity flow problem can be solved
in polynomial time. In practice, it is sufficient to con-
vert resulting fractional flows to integral flows by ran-
domized rounding (Rossi et al., 2016).
Secondly, the demand is time-variant and thus the
system should be properly modeled in the framework
of flows over time. The explicit modeling of time
can be avoided when the system is locally modeled
as being in a steady-state, i.e., the demand flows are
time-invariant. This approach has been proposed in
(Zhang et al., 2016a) and it is argued to be applicable
if the demand changes slowly relative to the average
travel duration in the system. In practice, the steady-
state formulation could be solved iteratively at differ-
ent times of the day and the solution from the most
recent computation is used to derive the routes for the
vehicles in the fleet.
In the next section we introduce the formulation
of steady-state flow model that is then extended to
the dynamic model. The approaches are demonstrated
and compared on an illustrative scenario.
4 STEADY-STATE APPROACH
In this section, we formally state the steady-state net-
work flow model of MoD system that roughly corre-
sponds to the approach introduced in (Zhang et al.,
2016b). The road network is represented by a di-
rected graph G = (V ,E), where V is the node set and
E ⊆ V × V is the edge set. Nodes correspond to road
junctions and edges to the road links. The capacity of
a road link (u,v) ∈ E is denoted as c(u,v) ∈ Z
>0
and
corresponds to a maximal flow rate of vehicles that
can enter the road link per time unit to keep free flow
speed. We denote τ
(u,v)
∈ Z
≥0
, as free flow traversal
time in time units over edge (u, v).
The capacities and free flow traversal times are
considered to be static. The set of demand flows (ag-
gregated transportation requests) is M = {(s
m
,g
m
)}
m
,
where for the m-th demand flow, s
m
∈ V is the origin
of the flow, g
m
∈ V is the goal destination, and the
intensity of the demand flow is λ
m
, in passengers per
time unit. The cardinality of the set M is denoted by
M.
There are two types of flows considered: passen-
ger flows and rebalancing flows. The passenger flows
correspond to parts of vehicle routes with passengers
on board and the rebalancing flows correspond to the
parts of routes when vehicles drive without passen-
gers. The flow rate on the edge (u,v) ∈ V for the
passenger flow m is denoted as f
m
(u,v) : E × M 7→
Z
≥0
,(u,v) ∈ E,m ∈ M . Further, the rate of rebalanc-
ing flow entering edge (u,v) is denoted by f
R
(u,v) :
E 7→ Z
≥0
.
For the modeling purposes, we introduce addi-
tional virtual nodes and edges. We add a virtual de-
mand source node s
V
m
for each m ∈ M . Each s
V
m
is
connected to G by edge (s
V
m
,s
m
) that allows the ser-
viced demand to join the transportation network.
Similarly, virtual demand sink nodes g
V
m
and edges
(g
m
,g
V
m
) are added. The edges (g
V
m
,s
V
m
) are added to
virtually close the demand into a loop, which simpli-
fies flow conservation constraints. The vehicles can
park only in a set of depots D ⊆ V .
For each depot v ∈ D there is a virtual edge
(dg
V
v
,ds
V
v
) representing the depot at node v that is
connected to the graph G so that it allows the vehi-
cles to join or to leave the transportation network, i.e.,
an edge (ds
V
v
,v) and an edge (v,dg
V
v
), ∀v ∈ D .
Then, the set of all virtual nodes is V
V
and the set
of all virtual edges is E
V
.The resulting augmented
graph is G
0
= (V
0
,E
0
), where V
0
= V ∪ V
V
and
E
0
= E ∪ E
V
.
Now we are in position to cast the problem of fleet
routing in capacitated networks as an instance of min-
imum cost multi-commodity flow problem:
On-demand Robotic Fleet Routing in Capacitated Networks with Time-varying Transportation Demand
909
Problem 1. Steady-state OFRCNP. The task is to
minimize:
∑
(u,v)∈E
0
τ(u,v)
∑
m∈M
f
m
(u,v) + f
R
(u,v)
, (1)
subject to:
∑
u∈V
0
f
m
(u,v) =
∑
w∈V
0
f
m
(v,w), (2)
∀v ∈ V
0
, ∀m ∈ M , (3)
∑
j∈M
f
j
(g
V
m
,s
V
m
) = λ
m
, ∀m ∈ M , (4)
∑
v∈{v:(s
V
m
,v)∈E
0
)}
f
m
(s
V
m
,v) = λ
m
, ∀m ∈ M , (5)
∑
m∈M
f
m
(u,v) + f
R
(u,v) ≤ c(u,v), ∀(u, v) ∈ E,
(6)
∑
m∈M
1
(v,g
V
m
)∈E
0
f
m
(v,g
V
m
) +
∑
u∈R
S,v
f
R
(u,v) = (7)
∑
m∈M
1
(s
V
m
,v)∈E
0
f
m
(s
V
m
,v) +
∑
w∈R
G,v
f
R
(v,w), ∀v ∈ V .
The objective is to minimize the total traveling
time of the vehicles, i.e., the cost of the fleet opera-
tion. Note that, it also means that the average travel
time of vehicles is minimized. The constraints en-
force that the passenger flows are conserved and that
the intermediate storage in junction nodes is forbid-
den (2), request flows are satisfied and consistent (4,
5), rebalancing flows in the road network transform
to passenger flows, and vice versa, without loss
1
(7)
2
,
and the capacity of road links is not exceeded (6).
5 DEALING WITH
TIME-VARYING DEMAND
The steady-state approach hinges on the assumption
that the demand intensity is time-invariant. This as-
sumption is however often not justified when demand
patterns change rapidly, which occurs in practice in
the transient periods around the traffic peaks. For ex-
ample, between 6 a.m. and 7 a.m., the traffic intensity
increases by 60% in the city of Prague (The Techni-
cal Administration of Roads of the City of Prague,
1
Note that rebalancing flows origin in depot nodes or by
dropping off passengers and sink by picking-up passengers.
2
Function 1
x
denotes the indicator of the Boolean vari-
able x = {true, f alse}, that is 1
x
equals one if x is true, and
equals zero is x is false. For node v, the set R
S,v
= {u :
(u,v) ∈ E
0
∧ u 6= s
V
m
∀m ∈ M } and set R
G,v
= {w : (v,w) ∈
E
0
∧ w 6= g
V
m
∀m ∈ M }
2020). To account for the time-varying demand, we
extend the demand formulation by time. The set of
demand flows (aggregated transportation requests) is
then M = {(s
m
,g
m
,t
m
,d
m
)}
m
, where for the m-th de-
mand flow, s
m
∈ V is the origin of the flow, g
m
∈ V
is the goal destination, t
m
is the earliest time when the
requests in the flow can be served and d
m
is the latest
time to drop-off.
In the following, we will use a simplified scenario
to demonstrate in what situations can the steady-state
approach fail. The scenario represents phenomena
that may occur during the onset of afternoon traffic
peak. Initially, we introduce the scenario, we describe
how the steady-state approach deals with the time-
varying demand. Then, when the limitations of the
approach are shown, we introduce the flows over time
approach to address the limitations of the former ap-
proach.
(a)
node / t 1 2 3 4
north-south 2 0 0 0
center-south 0 0 1 2
(b)
Figure 1: Road Network A (a), demand over time (b).
5.1 Example Scenario
In Fig. 1a, we show a simplified road network, rep-
resenting a city with central commercial area at Node
2 and north, south and west peripheries at N. 1, N. 3,
and N. 4 respectively. The road network has a ring-
radial topology, but we only consider the west half
of the network and the north-to-south road directions
to simplify the visualization. Also, for a matter of a
clear demonstration of the influence of time-varying
demand, we let each of the nodes be a depot node,
i.e., no rebalancing is needed in these networks, the
vehicles are immediately available in every node and
can park in every node where a passenger gets off.
In result, all the flows in the scenario are the passen-
ger flows and we can easily observe and compare the
passenger routes found by the compared algorithms.
Also, we consider time to be discretized into a set of
time steps T = {1, 2,3,...} and denote T = |T |.
We consider two south-bound demand flows.
North-south flow (1 → 3) represents regular constant
flow of through traffic that is present all day (in our
example, it is active only at t = 1 because longer flows
are difficult to visualize). The second, center-south
flow (2 → 3) represents commuters’ flow leaving their
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
910
work at the central commercial area that increases
during afternoon and leads to a traffic peak. The de-
mand flow intensities are time-varying as shown in
Fig. 1b.
5.2 Applying Steady-state Approach
In this section, we will discuss an application of a
steady-state approach on the road network with time-
varying demand. The idea is to ignore the dynamism
of demand and periodically recompute the solution
under the assumption that the demand intensities ob-
served at the current time are identical to past inten-
sities and will remain constant in future. The steady-
state solution is computed and all vehicles departing
at the time step follow the corresponding steady-state
flows solution computed using the current intensities.
The vehicles are assigned a route at the time of their
departure and this route remains unchanged until they
reach their destination. This strategy is applied, for
example, in (Zhang et al., 2016b).
We implemented the approach by repeatedly solv-
ing the steady-state flow problem in each time step.
That is, we generated a linear program corresponding
to Problem 1 and solved it using the CBC solver. The
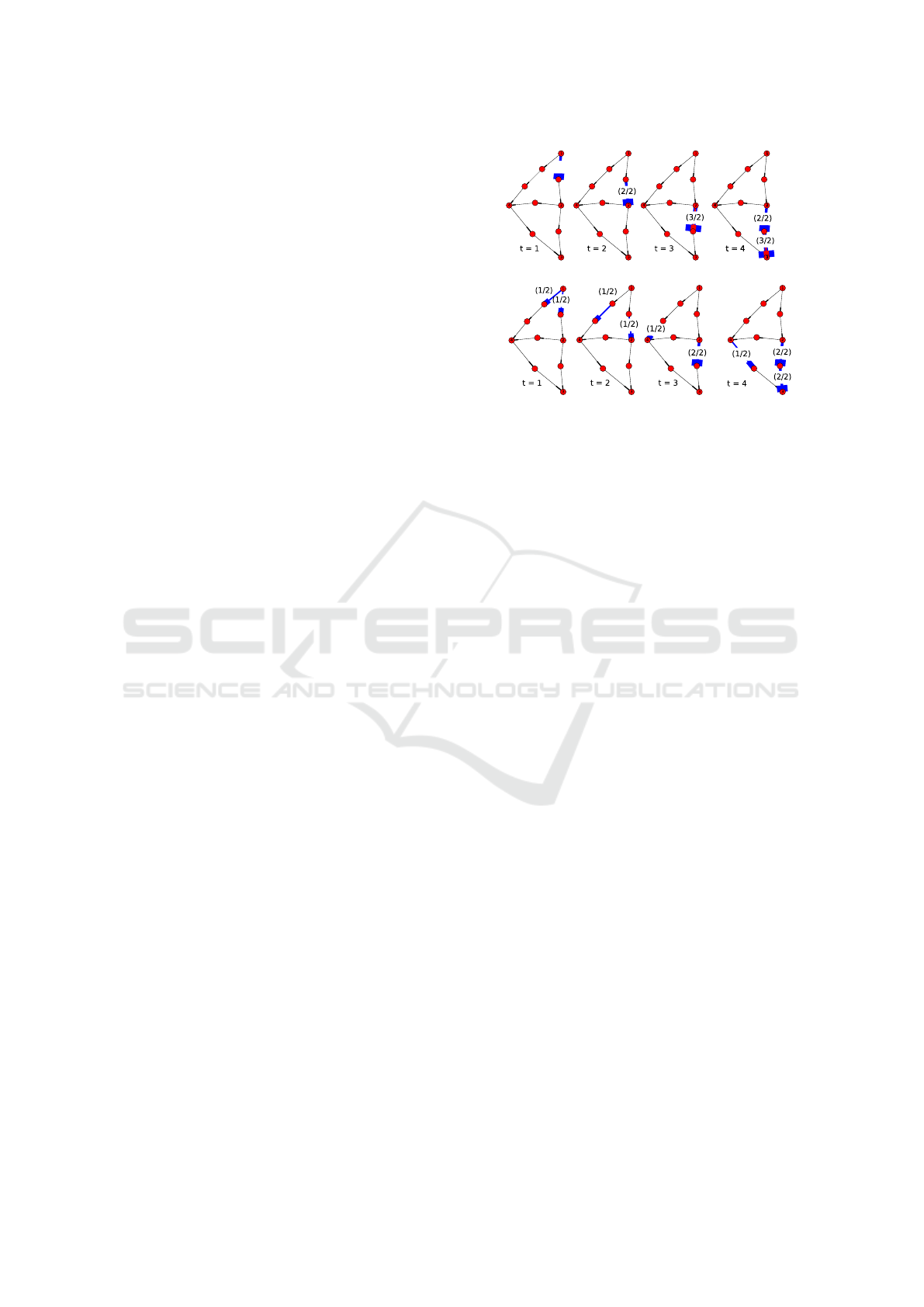
solution flows are visualized in Fig. 2a using a unit-
length graph in which the original edges are split into
unit-length edges. Then, the transit time of each edge
in this graph is equal to one, which allows us to visu-
alize the flows in time in the network by a sequence
of the figures. The flow under the link capacity is
depicted in blue, if the capacity is exceeded the pro-
portional part of the flow is colored in red. The labels
illustrate how much of the link capacity is consumed
by the flow.
The steady-state approach operates as follows. In
each time step, current demand flows are routed by
min cost flows while ignoring previous flows and fu-
ture demand. Path of each vehicle is fixed as soon as
it departs.
The Fig. 2a illustrates the limit of the steady-state
approach in the presence of a time-varying demand
on the Road network A. We observe that at the time
of the change in the demand, i.e., the increase of de-
mand in the commercial center (N. 2), the approach
ignores previous flows and sends the flow simultane-
ously with the north-south flow (edge (2, 3)). In re-
sult, the flows exceed the road capacity.
We have demonstrated that steady-state approach,
that ignores the dynamism of transportation demand,
cannot be easily applied to the scenario with time-
varying demand. An approach that allows finding a
solution to scenario like Road Network A is to con-
sider flows over time.
(2/2)
(a)
(b)
Figure 2: Steady-state approach (a) and Dynamic approach
(b) solution for Road Network A.
6 FLOWS OVER TIME:
DYNAMIC APPROACH
The main idea of the proposed dynamic approach is to
construct a so-called time-expanded graph (Ford and
Fulkerson, 1958) and apply the steady-state approach
over such a graph. The resulting flows on the time-
expanded graph then represent spatio-temporal routes
on the original road network.
The time-expanded graph (Ford and Fulkerson,
1958) consists of T copies (layers) of nodes of the
original road graph. The layers are connected accord-
ing the traversal times of the corresponding edge. The
time-expanded graph G
T
= (V
T
,E
T
) is defined as
V
T
= {(u,t) : u ∈ V ,t ∈ T }, E
T
= {((u,t),(v,t +
τ(u,v)) : (u,v) ∈ E}. Note that the capacities are
static, i.e., c((u,t
1
),(v,t
2
)) = c(u,v)∀t
1
,t
2
∈ T and
(u,v) ∈ G.
Additional virtual nodes are connected to the
graph to model passenger waiting. We add a vir-
tual demand source node s
V
m
for m ∈ M . The
virtual source nodes are connected to the G
T
by
(s
V
m
,(s
m
,t)),∀t ∈ {t ∈ T : t
m
≤ t ≤ d
m
},∀m ∈ M , to let
serviced demand to join the transportation network.
Additionally, a virtual demand sink nodes g
V
m
and
edges ((g
m
,t),g
V
m
) ∀t ∈ {t ∈ T : t
m
≤ t ≤ d
m
}∀m ∈
M are added. The edges (g
V
m
,s
V
m
)∀m ∈ M virtually
close the demand circulation for simpler flow con-
servation constraints. The vehicles can be parked in
depots D ⊆ V . Each depot v ∈ D generates edge
(dg
V
v
,ds
V
v
) that is connected to the graph G
T
so that it
allows the vehicles to join or to leave the transporta-
tion network at each time, i.e., an edge (ds
V
v
,(v,t))
and an edge ((v,t),dg
V
v
)∀v ∈ D ∀t ∈ T . The set of
virtual nodes is V
V
and the virtual edges E
V
The re-
On-demand Robotic Fleet Routing in Capacitated Networks with Time-varying Transportation Demand
911
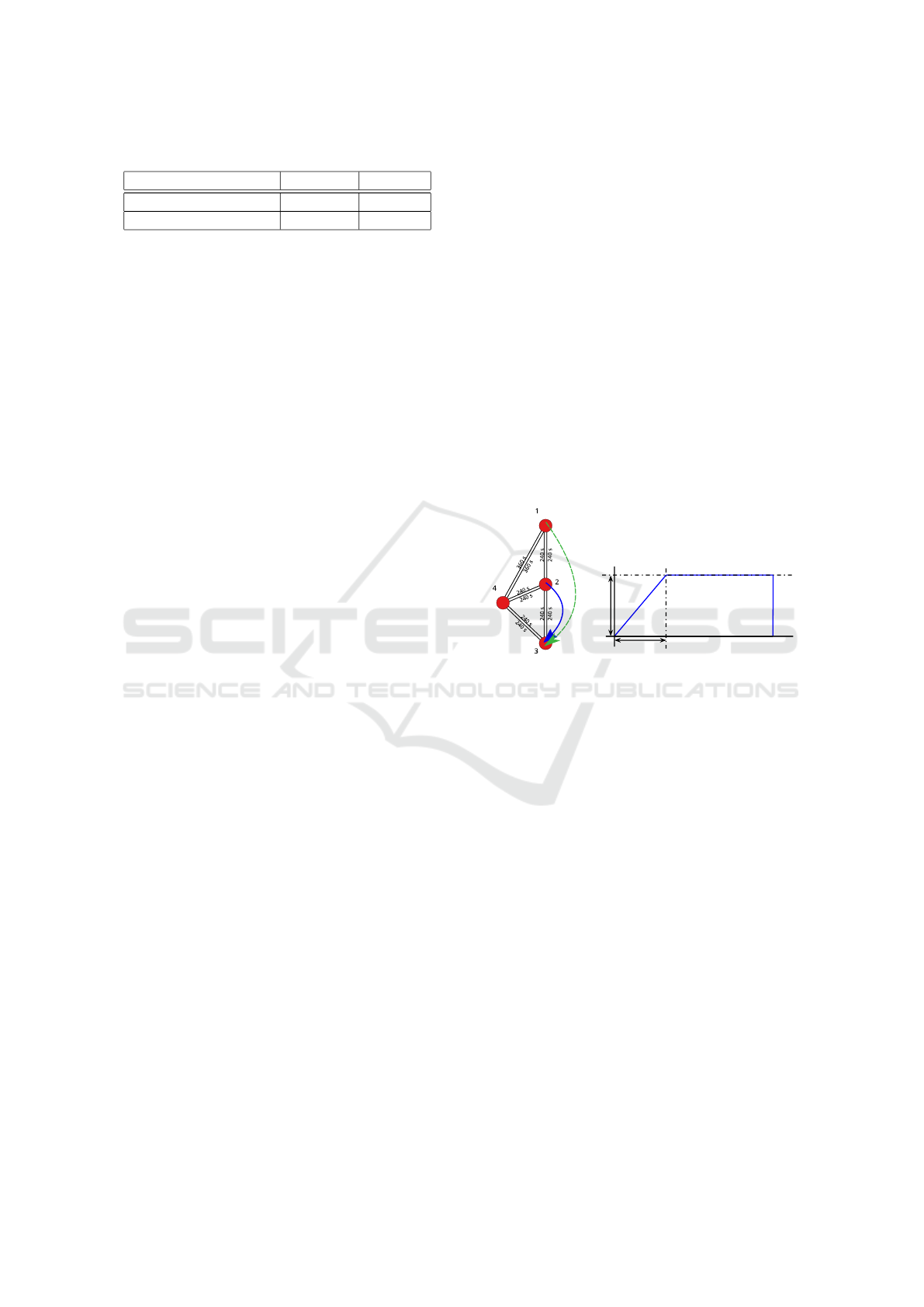
Table 1: Cost and congested flow: Road Network A.
capacity constraints strict relaxed
Steady-state approach infeasible 14 (6/4)
Dynamic approach 15 15 (0/0)
sulting graph is G
0
= (V
0
,E
0
), where V
0
= V
T
∪V
V
and E
0
= E
T
∪ E
V
. The traffic flows over time are
defined analogically as steady-state flows, the differ-
ence is that these are defined on the time-expanded
graph G
T
. Finally, we define the solution of the on-
demand fleet routing over time on road graph G to be
the solution of the steady-state on-demand fleet rout-
ing over the time-expanded graph G
T
. The described
approach is later referred as the dynamic approach.
6.1 Dynamic Approach Solution
The model of flows over time, in contrast with the
steady-state approach, considers both previous and
predicted future flows. Fig. 2b shows the optimal so-
lution of the Problem 1 with time provided by the dy-
namic approach. The steady-state approach ignores
previous flows, so when the partial flows are put to-
gether in time the resulting flows can exceed the road
capacity. We refer to such a solution as being infea-
sible. We already showed that for Road Networks A,
the solution of the steady-state approach is infeasible.
We compare the solution quality of the considered
approaches on the Road Network A in Table 1. We
compare the approaches in two settings: 1) we con-
sider problems strictly as defined, 2) we relax the road
capacity constraints if no other feasible solution ex-
ists. In the strict setting, we can confirm that the basic
steady-state approach that ignores previous flows is
infeasible. The dynamic approach finds the optimal
feasible solution in the both settings.
If we relax the capacity constraints in the case no
feasible solution is found, we can observe lower costs
in steady-state approach, but the rate of vehicle flows
may exceed the capacity constraints of the road links.
The exceeded capacity is described in brackets in the
form (F/C) where F is a the sum of flows on the
edges with exceeded capacity and the C is a capacity
constraint over such edges. The values reveal by how
much are the capacities exceeded, which also hints on
the severity of congestion that would appear in prac-
tice. In Table 1 we observe that the steady-state ap-
proach can assign flows that consume up to 150% of
the road capacity.
7 SIMULATION EVALUATION
In this section, we will evaluate the performance of
the proposed fleet routing approach in simulation. For
evaluation, we use an abstract model of a part of a city
highway network shown in Fig. 3a. The road network
connects the city center (N. 2) to three peripheries (N.
1, 3, 4) of a small metropolitan area. We study the
interaction of a through-traffic demand flow (N. 1 →
N. 3) with a local-traffic demand flow (N. 2 → N. 3)
during morning traffic peak. The intensity of trans-
portation demand in each of these demand flows in-
creases in time up to a saturation level according to a
trapezoid impulse function depicted in Fig. 3b. The
shape of the demand ”impulse” is controlled by tau
and peak parameters. The former represents the time
to reach full saturation, measured in seconds. The lat-
ter represents the intensity at full saturation relative to
the free-flow capacity of a road segment.
(a)
peak
tau
time 2h
0
(b)
Figure 3: Test Scenario. Road network and the two demand
flows (left) and the shape of demand ”impulse” (right).
7.1 Congestion Model
The travel velocity on the individual edges is mod-
eled as density-dependent. We use an empirical
two-regime link delay model for highway segments.
The vehicles are able to drive at free-flow speed un-
til the vehicle density at the link exceeds so-called
free-flow capacity. In our case, the free-flow den-
sity is 20 veh./km, which corresponds to the flow of
0.55 veh./sec. at 100 km/h. At this point, the traf-
fic enters so-called bound flow regime and the ve-
hicles start decreasing their velocity. One of the
crucial empirical observations made by transporta-
tion researchers is that, initially, the density of ve-
hicles increases slightly faster then their speed re-
duces and thus the vehicle flow is typically observed
to increase until the density reaches so-called criti-
cal capacity. The critical capacity in our model corre-
sponds roughly to the density of 25 veh./km and flow
of 0.56 veh./sec. at 80 km/h. After the critical capac-
ity has been exceeded, both the velocity and the flow
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
912
of traffic start rapidly declining. At this point, the sys-
tem enters an unstable regime with self-reinforcing
feedback loop that eventually leads to build-up of
standstill or slowly moving queues.
7.2 Experiment Setup
We compare the performance of three fleet-routing
strategies: In shortest-path approach, all vehicles are
routed along the shortest path from the origin of each
demand request to its destination. In steady-state ap-
proach, we compute the routes by sequentially solv-
ing the steady-state formulation as described in Sec-
tion 5.2. In dynamic approach, we compute the routes
by solving the flows over time formulation as de-
scribed in Section 6. The capacity constraint of each
road segment is set to correspond to free-flow capac-
ity of that edge, i.e, it is set to 0.55 veh./sec. In reality,
the edge free-flow capacities might be too restrictive
for high demand, and cause the approaches to fail to
provide a feasible solution. For such cases, the capac-
ity constraints are modeled as elastic constraints. The
capacity can be exceeded for additional penalty that
is linear in the capacity excess and the link free-flow
traversal time. The penalty enforces that the capacity
is exceeded only if no other feasible solution exists.
We generate two hours of through-traffic and
local-traffic transportation demand discretized to
2 min. timesteps following trapezoidal shape with dif-
ferent combinations of tau and peak parameters. In
particular, we create the combination such that tau
takes values 20 min, 30 min, 45 min, and 60 min and
peak takes values 0.5, 0.55, .. ., 1.25. This will al-
low us to study how does the dynamism and the scale
of the demand affect the performance of the individ-
ual approaches. Then we let each approach to gener-
ate routes for all the vehicles serving the transporta-
tion demand. Finally, we simulate the movement of
individual vehicles in the multi-agent traffic simula-
tor Agentpolis employing the congestion model de-
scribed in the previous section and record the travel
delay of each vehicle.
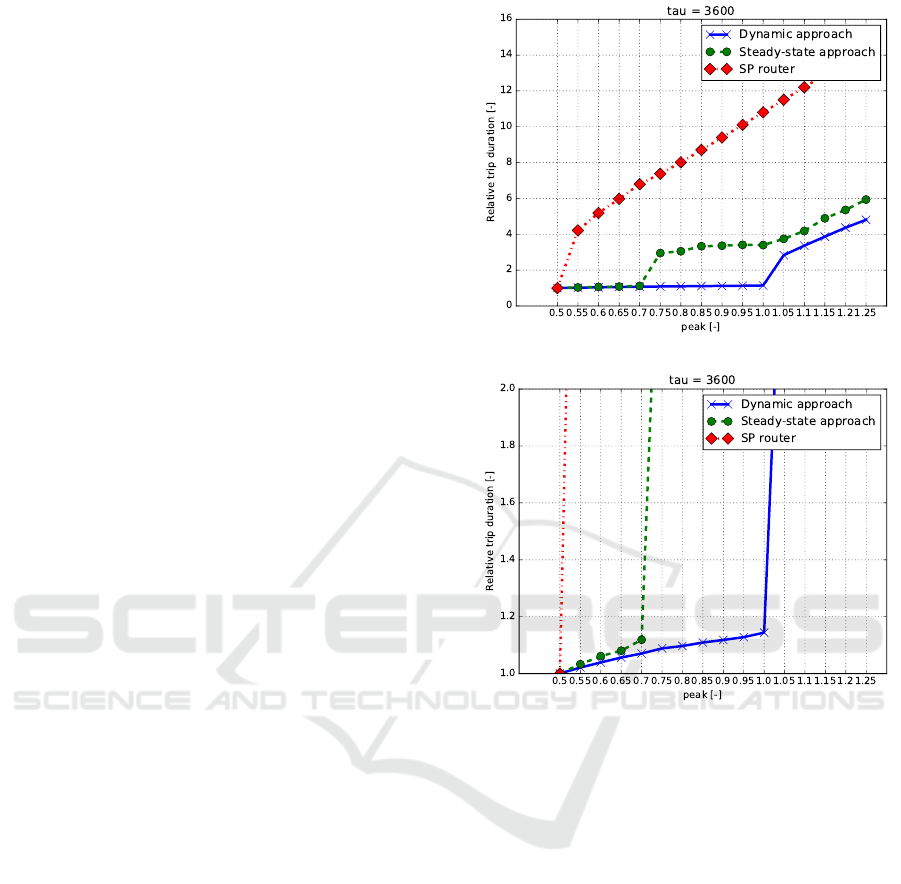
7.2.1 Results
The average travel prolongation achieved by the three
compared methods as a function of peak parameter is
shown in Fig. 4 for slowly (1 h to saturation) evolving
demand. To correctly interpret the results, it is useful
to observe that there are two key thresholds for peak
parameter. Firstly, since we are only working with
two demand flows, for peak ≤ 0.5, it is impossible to
exceed the link capacity (unless some vehicle travel
along some segment multiple times) and thus all three
approaches maintain zero prolongation. On the other
(a) Overall view
(b) Zoomed view on prolongation values for under-capacity
flows
Figure 4: Average Travel Prolongation vs. peak, tau = 60
min.
hand, for peak > 1, the link capacities will be neces-
sarily exceeded by any routing policy. Thus, we are
interested in the ability of the three routing policies to
maintain reasonable delay in between these two ex-
tremes.
As we can see, the congestion-unaware shortest
path policy routes both demand flows through the cen-
ter and thus the traffic on link (2,3) quickly exceeds
the critical intensity and enters the unstable, highly
congested regime, resulting in extremely high travel
delays. The steady-state approach initially serves the
through-traffic demand flow by two vehicle flows, one
going through the center, the other one routed through
the periphery. Since a portion of the vehicles travel
via a route that is 25 % longer than the shortest route,
the average travel prolongation is slightly increased.
The fact that steady-state approach does not account
for future changes in demand results in excess traffic
On-demand Robotic Fleet Routing in Capacitated Networks with Time-varying Transportation Demand
913
on link (2, 3). This undesirable excess flow is larger
for larger values of peak and for faster change in de-
mand, i.e, for smaller values of tau. The flow eventu-
ally grows large enough to exceed the critical capac-
ity, leading again to collapse of the traffic flow and
subsequently to significant travel delays. Since the
traffic collapses only for the through-flow routed via
the city center and the vehicles driving via the periph-
ery remain traveling at free-flow speed, the average
prolongation remains smaller than the average prolon-
gation for the shortest path strategy.
The dynamic approach successfully accounts for
anticipated future demand by preemptively routing
part of the through-flow via the periphery. Although
this results in up to 1.2x travel time prolongation, the
algorithm maintained sub-critical flows in the system
for all peak values < 1.0. For completeness, the com-
parison of average travel delay for steady-state and
dynamic approach for all combinations of values for
tau and peak parameters are depicted in Fig. 5b. The
same phenomena can be observed.
These results suggest that system optimal fleet
routing that explicitly addresses time-varying demand
has a potential to significantly increase the amount
of transportation demand that can be efficiently trans-
ported through existing road infrastructures. Indeed,
compared to the shortest path approach, the proposed
technique can be used to service twice as many trans-
portation request in the same road network with-
out worsening the congestion. In comparison to the
steady-state approach, the dynamic method is capable
of servicing 42 % extra demand (1.0 vs. 0.7) through
the same road network.
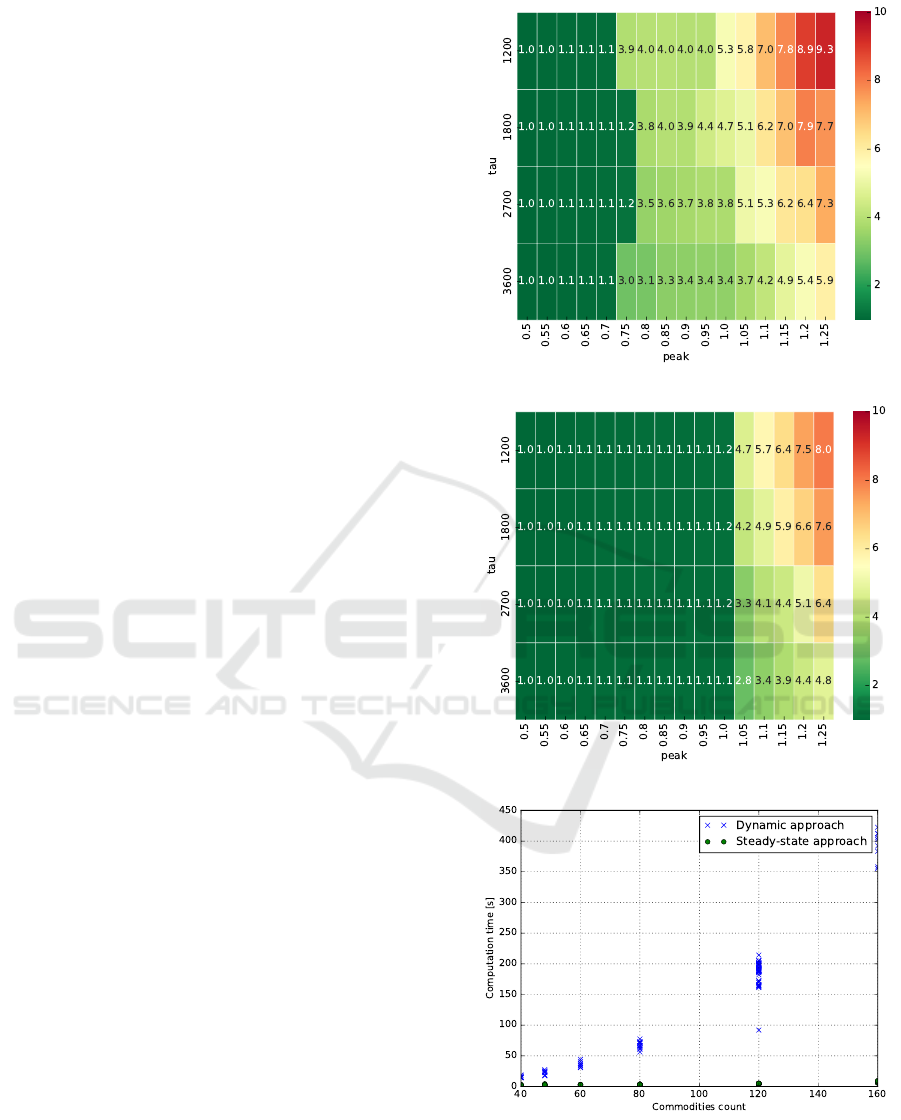
The dynamic approach results in a large linear
program that is computationally demanding to solve
optimally using general solution techniques as shown
in Fig. 5c. The linear program can have up to T · M ·
(|E|+M + |V |) variables and T ·M ·|V | + M
2
+|E|·T
constraints. The most limiting factor in the sense of
the scalability is M - the number of demand flows (i.e.,
commodities). Recall that a demand flow is an aggre-
gation of requests that have the same origin, destina-
tion, the earliest pick-up and the latest drop-off time.
In the worst case the M is in order of V
2
·T even under
the additional assumption that the latest drop-off time
is dependent on the three other demand flow parame-
ters. Thus, the number of constraints may, in the worst
case, grow with |V |
4
, which makes this approach im-
practical for detailed model of large metropolitan net-
works that may contain tens or hundreds of thousands
of vertices. Solving large-scale instances will thus
likely require application of more advanced solution
techniques. The results of (Schaefer et al., 2019) on
the steady state problem variant indicate that Dantzig-
(a)
(b)
(c)
Figure 5: Average delay for combinations of tau and peak
for the steady-state (a) and the dynamic (b) approach. Scal-
ability (c): computation time for 2 h demand, the commodi-
ties count is varied by adapting the timestep.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
914

Wolf decomposition (Dantzig and Wolfe, 1960) could
be also employed to solve larger scale instances of our
problem with time-varying demand.
8 CONCLUSION
To conclude, in this paper, we identified the prac-
tical limitations of steady-state approach to solve
on-demand fleet routing when the demand is time-
varying. We proposed an alternative approach that
explicitly models the evolution of system in time.
We implemented both steady-state and dynamic ap-
proaches and compared them on the simplified, but
characteristic illustrative example. While the steady-
state approach fails to find a solution or generate
routes that exceed route link capacities by up to 50 %,
the proposed approach is able to solve such instances
without exceeding the road link capacities. Conse-
quently, the simulation experiments with the conges-
tion model reveal that the proposed approach that uses
the flows over time model outperforms the steady-
state approach in presence of the time-varying de-
mand. The dynamic solution can transfer 42% more
demand in the congestion-free regime than the steady-
state approach on the same illustrative road network.
The proposed model that explicitly models time is
larger and generally harder to analyze and compute
than the steady-state model. Therefore, in future
work, we will study the applicability of specialized
solution techniques for large-scale linear programs,
e.g. the applicability of Dantzig-Wolfe decomposi-
tion method as applied in (Schaefer et al., 2019), to
improve the scalability of the proposed approach.
ACKNOWLEDGEMENTS
The authors acknowledge the support
of the OP VVV MEYS funded project
CZ.02.1.01/0.0/0.0/16 019/0000765 ”Research
Center for Informatics” and TACR NCK project
T N01000026 ”Josef Bozek National Center of
Competence for Surface Vehicles”.
REFERENCES
Berbeglia, G., Cordeau, J.-F., Gribkovskaia, I., and Laporte,
G. (2007). Rejoinder on: Static pickup and delivery
problems: a classification scheme and survey. TOP,
15(1):45–47.
Dantzig, G. B. and Wolfe, P. (1960). Decomposition Prin-
ciple for Linear Programs. Operations Research,
8(1):101–111.
Even, S., Itai, A., and Shamir, A. (1975). On the complexity
of time table and multi-commodity flow problems. In
Foundations of Computer Science, 1975., 16th Annual
Symposium on, pages 184–193. IEEE.
Fiedler, D.,
ˇ
C
´
ap, M., and
ˇ
Certick
´
y, M. (2017). Im-
pact of mobility-on-demand on traffic congestion:
Simulation-based study. In 2017 IEEE 20th Interna-
tional Conference on Intelligent Transportation Sys-
tems (ITSC), pages 1–6. IEEE.
Ford, L. R. and Fulkerson, D. R. (1958). Constructing Max-
imal Dynamic Flows from Static Flows. Operations
Research, 6(3):419–433.
Frederickson, G. N., Hecht, M. S., and Kim, C. E. (1976).
Approximation algorithms for some routing problems.
In 17th Annual Symposium on Foundations of Com-
puter Science (sfcs 1976), pages 216–227.
Pillac, V., Gendreau, M., Gu
´
eret, C., and Medaglia, A. L.
(2013). A review of dynamic vehicle routing prob-
lems. European Journal of Operational Research,
225(1):1–11.
Rossi, F., Zhang, R., and Pavone, M. (2016). Congestion-
aware randomized routing in autonomous
mobility-on-demand systems. arXiv preprint
arXiv:1609.02546.
Schaefer, M.,
ˇ
C
´
ap, M., Mrkos, J., and Vok
ˇ
r
´
ınek, J. (2019).
Routing a fleet of automated vehicles in a capacitated
transportation network. In 2019 IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems
(IROS), pages 8223–8229.
Solovey, K., Salazar, M., and Pavone, M. (2019). Scal-
able and congestion-aware routing for autonomous
mobility-on-demand via frank-wolfe optimization. In
Robotics: Science and Systems, Freiburg im Breisgau,
Germany.
Spieser, K., Treleaven, K., Zhang, R., Frazzoli, E., Mor-
ton, D., and Pavone, M. (2014). Toward a Systematic
Approach to the Design and Evaluation of Automated
Mobility-on-Demand Systems: A Case Study in Sin-
gapore. In Road Vehicle Automation, pages 229–245.
Springer.
The Technical Administration of Roads of the City of
Prague (2020). Prague transportation yearbook
2019. http://www.tsk-praha.cz/static/udi-rocenka-
2019-en.pdf. Accessed: Nov 26, 2020.
Wollenstein-Betech, S., Houshmand, A., Salazar, M.,
Pavone, M., Cassandras, C. G., and Paschalidis, I. C.
(2020). Congestion-aware routing and rebalancing
of autonomous mobility-on-demand systems in mixed
traffic. In Proc. IEEE Int. Conf. on Intelligent Trans-
portation Systems, Rhodes, Greece. In press.
Zhang, R., Rossi, F., and Pavone, M. (2016a). Routing
autonomous vehicles in congested transportation net-
works: Structural properties and coordination algo-
rithms. In Robotics: Science and Systems XII, Uni-
versity of Michigan, Ann Arbor, Michigan, USA, June
18 - June 22, 2016.
Zhang, R., Rossi, F., and Pavone, M. (2016b). Routing Au-
tonomous Vehicles in Congested Transportation Net-
works: Structural Properties and Coordination Algo-
rithms. In Robotics: Science and Systems XII, vol-
ume 42, pages 1427–1442. Robotics: Science and
Systems Foundation.
On-demand Robotic Fleet Routing in Capacitated Networks with Time-varying Transportation Demand
915
