
Classification of Visual Interest based on Gaze and Facial Features
for Human-robot Interaction
Andreas Risskov Sørensen, Oskar Palinko
a
and Norbert Krüger
b
The Maersk Mc-Kinney Moller Institute, University of Southern Denmark, Campusvej 55, DK-5230 Odense M, Denmark
Keywords: Human-robot Interaction, Visual Interest, Gaze, Classification.
Abstract: It is important for a social robot to know if a nearby human is showing interest in interacting with it. We
approximate this interest with expressed visual interest. To find it, we train a number of classifiers with
previously labeled data. The input features for these are facial features like head orientation, eye gaze and
facial action units, which are provided by the OpenFace library. As training data, we use video footage
collected during an in-the-wild human-robot interaction scenario, where a social robot was approaching
people at a cafeteria to serve them water. The most successful classifier that we trained tested at a 94%
accuracy for detecting interest on an unrelated testing dataset. This allows us to create an effective tool for
our social robot, which enables it to start talking to people only when it is fairly certain that the addressed
persons are interested in talking to it.
1 INTRODUCTION
Robots are becoming more and more commonplace in
today's world and thus an effort is made on creating a
common ground between them and humans. A large
part of communication between humans is based on
body-language, eye gaze and other subtle movements
(Argyle, 1972), so for robots to truly understand our
intentions they must be able to pick up on these non-
verbal cues (Mavridis, 2015). Human-robot interaction
can benefit a lot from a robots’ ability to read humans
or take commands that are not direct, in order to initiate
communication faster and make it smoother.
Classifying whether a connection has been made
using gaze and facial expressions of a person could
enable a robot to quickly discern whether it should
engage them or offer its services elsewhere, saving
time for both itself and others.
Visual interest in this work will mean a human’s
expressed attention towards the robot and its
behavior. This interest can partly be expressed by
establishing mutual gaze, i.e. eye contact with the
robot. This is a special communication situation when
both agents become aware of each other’s attention,
which creates a dedicated communication channel
between them. In addition to eye contact, other face
a
https://orcid.org/0000-0002-4513-5350
b
https://orcid.org/0000-0002-3931-116X
features, like emotion expression can also contribute
to a stronger expressed interest.
This work is using the SMOOTH robot as a
platform (Juel et al, 2020). It is a modular social robot
for helping in care homes and other locations. It is
designed to complete logistics (transporting laundry
bins) and people-related tasks, e.g. guiding of elderly
to the cafeteria, while navigating among them. An
additional task is serving drinks to care home
residents, as dehydration is a large problem, as some
elderly people tend to forget to drink water.
In our current work, this task was generalized to
the wider public, as the robot was tested at a
university cafeteria which also caters a nearby concert
hall (Palinko et al, 2020) (see Figure 1). The videos
used in creating the interest classifier were recorded
at this location during lunch breaks for students as
well as preceding events at the concert hall. To detect
face and eye features an open source library,
OpenFace, was utilized in order to extract
information from people’s images, including not only
gaze and head orientation but also details about
different facial features (Baltrusaitis et al, 2016). The
robot was operated at the cafeteria in a Wizard-of-Oz
manner (i.e. controlled by human operators from a
concealed location).
198
Sørensen, A., Palinko, O. and Krüger, N.
Classification of Visual Interest based on Gaze and Facial Features for Human-robot Interaction.
DOI: 10.5220/0010259301980204
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theor y and Applications (VISIGRAPP 2021) - Volume 2: HUCAPP, pages
198-204
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: The setup of the SMOOTH robot.
Regarding classification of visual interest, the
features which OpenFace provides will be inspected
in order to make sure they have the desired relevance
regarding interest. The process of how the used
datasets were chosen in order to minimize bias will be
explained, along with the labelling technique used to
designate ground truth to said data.
These datasets will be used to train several
classifiers belonging to three different categories:
Decision Trees, k-Nearest Neighbors and Support
Vector Machines. The classification models will be
tested on parts of the human-robot interaction data in
the pursuit of finding the one yielding the highest
interest prediction accuracy.
Other ways to improve the classification models
will be explored, including a look at the importance
of the individual features and combinations thereof,
along with the structure of the input parameters.
2 BACKGROUND
Recently, automatic face feature analysis has seen a
great expansion. OpenFace is one of the most popular
open source libraries which provides automatic face
feature, head pose, facial action unit and eye gaze
recognition (Baltrusaitis et al, 2016). OpenFace
utilizes a set of Action Units developed by Swedish
anatomist Carl-Herman Hjortsjö in 1969 (Hjortsjö,
1969). Action Units are defined by the Facial Action
Coding System which classifies human facial
movements by their appearance on the face and can
be used in recognition of basic emotions.
Regarding visual interest, there is considerable
background on visual attention between two agents
expressed by mutual gaze (Argyle et al, 1976).
Mutual gaze is an important tool not only in human-
human but also in human-robot interaction (Palinko
et al, 2015). A human and a robot sharing mutual gaze
are evidently also sharing visual interest in each other.
But this interest can have additional elements like
face expressions caused by emotions: a smiling
person might be more interested in communicating
with the robot compared to a person with a neutral
expression. This type of interest has not yet been very
well explored in the field of human-robot interaction.
The only study which the authors found on this topic,
(Munoz-Salinas et al, 2005), showed a system for
detecting, tracking, and estimating the interest of
people in mobile robots using fuzzy logic and stereo
vision. A fuzzy system computes a level of
probability of interest based on the person's position
in relation to the robot and estimate of attention given
by the orientation of the person’s head. The
orientation is determined by the amount of skin
detected, as it follows the assumption that more of a
person’s skin is visible when facing the robot.
However, fuzzy logic has in recent years not seen so
many applications as compared to other machine
learning approaches, which will be discussed in this
study.
Mutual gaze can be found by determining the eye
gaze angles of two agents. Researchers have in recent
time chosen to replace eye gaze with its first proxy,
head orientation, in situation where eye gaze was too
inaccurate or impractical. (Palinko et al, 2016)
describe how the richer information gained from eye
gaze has a significant impact on the human-robot
interaction compared to that of the head orientation
alone.
Machine learning and classification algorithms
are as popular as ever, and a wide variety of classifier
types are available. Some of the more recent advances
in this field are described in (Zhang, 2010).
3 APPROACH
This section describes the experiment from where the
data was collected (Section 3.1), what the data consist
of and how it was labelled (Section 3.2), and finally
which features were extracted from it (Section 3.3).
3.1 Robot Experiment
An “in the wild” Wizard-of-Oz human-robot
interaction experiment was performed in which the
SMOOTH robot was serving glasses of water to a
naïve audience. It was conducted at the University of
Southern Denmark’s Sønderborg location at the
ground floor cafeteria, which is also co-located with
a concert hall. The drink serving was conducted
during lunch hours where many students were present
as well as in the evening before events at the concert
hall, when event-goers populated the sitting areas.
The Wizard-of-Oz setup meant that the robot was
controlled from a remote location by human
operators, but the interacting audience thought the
Classification of Visual Interest based on Gaze and Facial Features for Human-robot Interaction
199

robot is acting autonomously. The operators had a
visual contact with the robot and could hear what
people were saying. One operator was driving the
robot, while the other pushed buttons to select what
and when the robot would say from a predefined set
of sentences, which were designed to convince people
to drink water. Results of this experiment were
reported on in (Palinko et al, 2020).
In our current study we used video recordings of
subjects interacting with the robot while getting
water. The recording device was a GoPro Hero
Session located on top of the robot’s head, just above
the simulated eyes, between the two loudspeakers, see
Figure 1 left and center. The data used for training
different classifiers was taken from videos recorded
by the robot during this water serving experiment.
3.2 Training and Testing Data
The data consists of a wide range of people; some are
interacting with the robot while others are not.
Figure 2: Examples of frames classified as ‘Interest’.
Figure 3: Examples of frames classified as ‘No Interest’.
From this data several smaller snippets were
extracted and put together to obtain two data sets of
people showing interest and no interest respectively.
Some examples of frames with each of the two
classification are shown in Figure 2 and Figure 3.
We selected snippets from the overall video
recordings and applied either the “interested” or “not
interested” category to each clip. Because of technical
difficulties in tracking each person in the video
separately, only those clips were selected in which
there was either only one person or where all people
shared the same interest or non-interest in the robot.
Clips with mixed interest were eliminated. The
assignment of interest was up to the judgement of the
authors and was based on people’s direction of gaze,
head orientation and face expressions.
A total of 48 video snippets were selected; 22 of
people showing interest and 26 of people showing no
interest. Each frame in the video snippets and each
face in each frame was used for training the classifier
separately. We had 22.604 frames labeled as
HUCAPP 2021 - 5th International Conference on Human Computer Interaction Theory and Applications
200
interested and 25.350 labeled as not interested in the
training dataset.
3.3 Gaze and Face Features
OpenFace is an open source facial behavior analysis
toolkit and is used in this work to extract facial
features to be used for classification. The system is
capable of performing Facial Landmark Detection,
head orientation tracking, and gaze tracking, and is
able to recognize certain Facial Action Units. Nearly
any anatomically possible facial expression can be
deconstructed using the Facial Action Coding System
(FACS), into the specific Action Units (AU) that
produced the expression (Ekman et al, 2012), which
is a common standard to objectively describe facial
expressions. OpenFace is able to recognize a subset
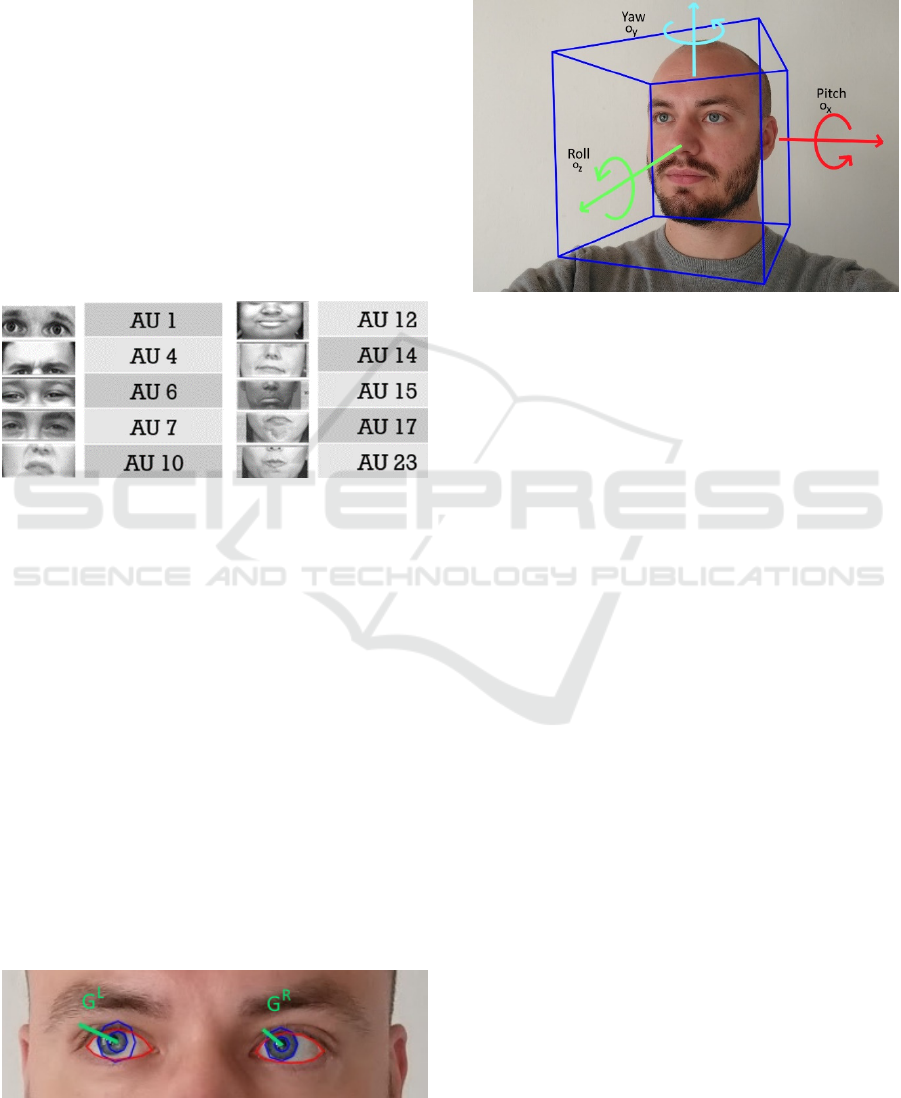
of AUs and selection of these are shown in Figure 4.
Figure 4: A selection of Action Units visualized: Outer
Brow Raiser, Brow Lowerer, Cheek Raiser, Lid Tightener,
Upper Lip Raiser, Lip Corner Puller, Dimpler, Lip Corner
Depressor, Chin Raiser, Lip Tightener.
In the following we will discuss which features were
used for training the classifiers:
Gaze Related. The gaze vectors for the eyes are
given by the three coordinates
𝐆
𝐋
=(g
, g
, g
) for
the left eye in the image and
𝐆
𝐑
=(g
, g
, g
) for the
right eye. The vectors are normalized and given in
world coordinates.
The eye gaze angles
𝐀=(a
,a
) are found by
averaging the two gaze vectors (
𝐆
𝐚𝐯𝐠
=0.5
(
𝐆
𝐋
+𝐆
𝐑
)
)
and taking the angles in x and y direction. These angles
are given in radians and world coordinates. If a
person’s gaze is shifting left to right this will results in
the change of a
going from positive to negative, and
if a person’s gaze is shifting up to down this will result
in a change of a
going from negative to positive.
Figure 5: Visualization of eye gaze vectors as green lines.
Head Orientation. Rotation of the head pose in
world coordinates with the camera as origin is given
as O = (o
x
, o
y
, o
z
). The rotation is in radians around
x,y,z axes. This can be seen as pitch (o
x
), yaw (o
y
),
and roll (o
z
).
Figure 6: Visualization of head orientation.
Facial Action Units. Action units can be described in
two ways. The first is a binary value determining if
the Action Unit is present or not, and the second is the
intensity of the Action Unit represented as a value
between 0 and 5. OpenFace provides both of these
parameters. It can detect the intensity and presence of
the following 17 Action Units:
𝐀𝐔
𝐤
=(AU
,AU
,AU
−AU
,AU
,AU
,AU
,
AU
,AU
,AU
,AU
,AU
,AU
,AU
,AU
)
where k = i, p for intensity and presence, respectively.
Additionally, the presence of Action Unit AU
can
be detected.
The chosen parameters for use in the
classification are then the 6 features for the two gaze
vectors (
𝐆
𝐋
,𝐆
𝐑
), the 2 features for the gaze angles
(A), the 3 rotation features for the head orientation
(O), the 17 intensity Action Units (
𝐀𝐔
𝐢
), and the 18
presence Action Units (
𝐀𝐔
𝐩
). This gives a total of 46
features.
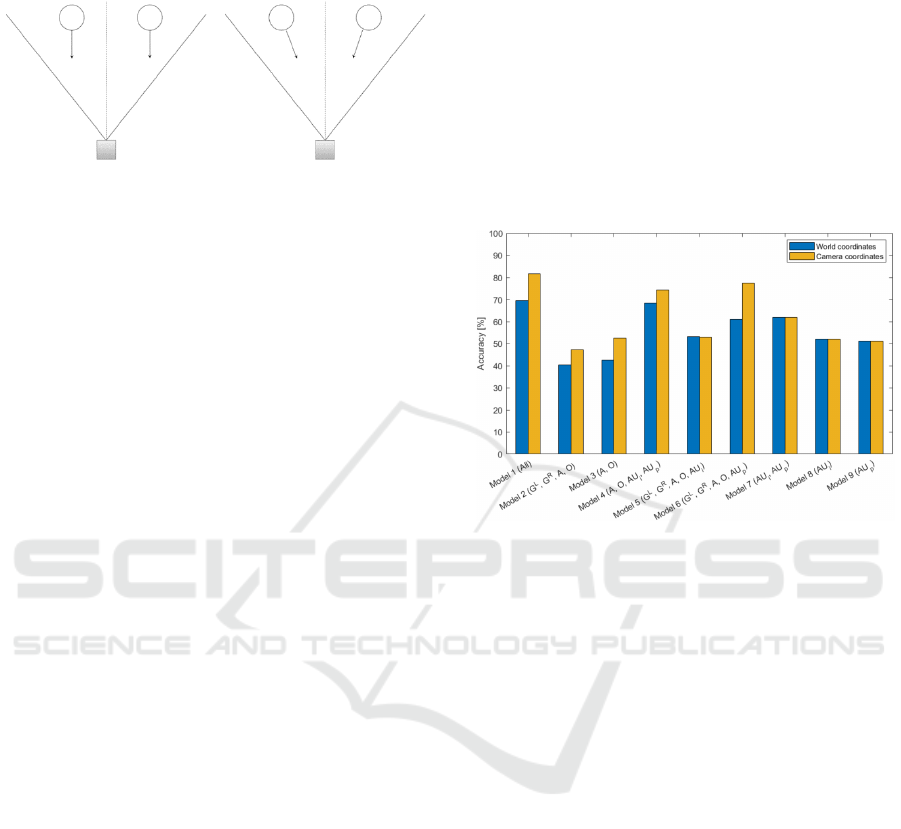
3.4 Data Processing
Change of Coordinate System. Head and gaze angles
in OpenFace are given in so-called world coordinates.
Since interest shown in the robot is in relation to the
camera, the angles were re-calculated with respect to
camera coordinates to reflect that. Figure 7 shows two
scenarios of the robot’s field of view seen from above,
with two people in the frame. On the left image the
orientations of the two people are parallel and in the
world coordinate system they have the angle value of
0. On the right they are both facing the camera of the
Classification of Visual Interest based on Gaze and Facial Features for Human-robot Interaction
201
robot which means that both their angles with respect
to the camera are equal to zero.
Figure 7: Left: the two people have the same orientation if
using world coordinates. Right: the two people have the
same orientation with respect to the camera.
Absolute Values. Gaze and head pose angles (𝐀 and
O) range from negative to positive depending on their
direction relative to the camera. The absolute values
of the horizontal angles (|
a
|) were used instead to
avoid potential bias of one data set having
significantly more people looking a certain direction
away from the camera. The same was not chosen for
the vertical angles (angles that change when looking
up-down) since the screen on the robot was located
below the camera, so direction of angle away from
zero could be related to interest.
Test Data. A separate dataset was created for use in
testing the classification models. This dataset
consisted of relatively short video snippets showing
the first author having varying gazes and head
orientations. The reason for not using parts of the
other source videos, as was done for the training data,
was to have an independent test set. In addition, using
average parameter values of several frames is
significantly easier with a single face compared to the
multiple faces in the source videos, which would have
to be tracked individually.
Training was done using 5-folds cross-validation to
avoid overfitting, and the accuracies of the models
were then found by using the models on the test dataset.
An additional observation made during these
experiments was that sometimes the outputs given by
OpenFace could be unreliable or incorrect for a short
period. That is, the gaze vectors were, during some
recordings, seen to be stable for most of the time, but
occasionally flicker in seemingly arbitrary directions
in short bursts. Therefore, it was chosen to use
averages of video clips for the testing data instead of
relying on single frames.
4 RESULTS
The dataset made from the data collected in
Sønderborg was used to train several classification
models, some only including a limited set of features,
to see which are most useful in classifying interest.
The classifier type was chosen to be Fine k-
Nearest Neighbours (meaning 𝑘=1) as it in initial
tests showed good accuracy combined with fast
training speed. The accuracies of the models were
found by evaluating the models on the separate
testing dataset by calculating the percentage of
correct classifications. One set of models were trained
using the camera coordinates, and another using the
world coordinates to determine whether there is an
improvement in accuracy as expected.
Figure 8: Comparison of accuracies between different
models using world coordinates and camera coordinates,
respectively. The used features are listed in parentheses.
Figure 8 shows that using all the features achieved
the highest accuracy. Using the camera coordinates
resulted in a significant improvement in the accuracy
compared to the world coordinates by almost 12
percentage points in the model with all features.
Using only features related to gaze and head
orientation (Figure 8, Model 2) reduced performance
to around 50 %, which is no better than guessing, and
is significantly worse than just the Action Units by
themselves. By comparing Model 5 to Model 6 it also
becomes clear that the presence Action Units are
more important than the intensity Action Units.
It was expected that the gaze and pose features
would be more relevant than the Action Units, so to
understand the poor performance of Model 2, the
prediction results for that model was inspected closer.
What proved to be the reason was that this model gave
a prediction of 'No Interest' for every point in the test
dataset. To see which of these 11 features were the
cause for this behaviour, further models were made
using different combinations of just these gaze and
head orientation features.
HUCAPP 2021 - 5th International Conference on Human Computer Interaction Theory and Applications
202

Table 1: Models using combinations of the 11 features.
Model Features
Accuracy
[%]
10
g
, g
, a
, o
74
11
g
, g
, g
, g
, a
, a
, o
, o
61
12
g
, g
, g
, g
, a
, o
65
13
g
, g
, a
, o
, 𝐀𝐔
𝐢
, 𝐀𝐔
𝐩
73
14
𝐆
𝐋
, 𝐆
𝐑
, a
, 𝑜
, AU
, AU
,
AU
, 𝐀𝐔
𝒑
82
Table 1 shows that the features describing the
horizontal angles of gaze and head orientation (Model
10) by themselves give a relatively good accuracy but
combining them with the features for the vertical
angles (
g
, g
, a
, o
) results in a poorer performance.
The explanation for this could be the difference
between the training and testing datasets, where the
test data has less variation and possibly some bias in
what camera angles were used. Keeping these
horizontal features and adding the Action Units back
in (Model 13), however, still gives a lower accuracy
than using all the 46 features. Using this knowledge
and trying to exclude the various intensity Action
Units a final set of features with the highest accuracy
was derived and is shown as Model 14. The 29
features included are the two gaze vectors, the
horizontal gaze and head orientation angles, all the
presence Action Units and three intensity Action
Units.
In order to find the optimal classifier type
additional models were trained using the above
feature set. The k-Nearest Neighbours models and the
Tree models all performed relatively well, while the
Support Vector Machine showed more varied
accuracies, with Fine SVM having the lowest score
and Linear SVM having the second highest. The
highest accuracy achieved was 90.24 % and was
reached by the Fine Tree model.
As discussed in section 3.4, the outputs of
OpenFace can sometimes be unreliable when looking
at individual images. Therefore, the testing data was
taken temporally by averaging over 30 data points at
a time, which is equivalent to one second. The models
using the various classifier types were tested using
this temporal averaging and the comparison to the
previous static classifiers can be seen in Figure 9.
Figure 9: Comparison of various classifier models using
static and temporal data, respectively.
Almost all of the classifiers had improved
performance by applying temporal averaging. The
best performing model was still of the Fine Tree type
were the accuracy was increased to 94.10 %. A final
comparison was made by retraining the models using
all 46 features and applying temporal averaging.
Figure 10 shows that the set of 29 features still results
in the highest performing models, but for some of the
k-Nearest Neighbours models using the full feature set
gave slightly higher accuracies. The performance of
the best model and its features are shown in Table 2.
Figure 10: Comparison of various classifier models using
the set of all features and the set of 29 features, respectively.
Table 2: Fine Tree model with the highest achieved
accuracy.
Classifier Features Accuracy
[%]
Fine Tree
𝐆
𝐋
, 𝐆
𝐑
, a
, 𝑜
, AU
, AU
,
AU
, 𝐀𝐔
𝒑
94.10
5 DISCUSSION AND
CONCLUSION
An interest detection system was developed by
training classifiers of various types and the best
performing model achieved an accuracy of 94 % on
Classification of Visual Interest based on Gaze and Facial Features for Human-robot Interaction
203

the test dataset. Fifteen classifier types were tested,
and their performances evaluated using subsets of the
features. The model achieving the highest accuracy
was of the Fine Tree type and used a subset of 29
features. Applying a temporal averaging to the test
data in order to remove noise showed an increased
performance for most of the classifiers.
The three intensity Action Units that proved to be
relevant for the classification model were
AU
, AU
, AU
. They refer to ‘Outer Brow Raiser’,
Brow Lowerer’ and ‘Lip Corner Puller’ respectively.
These are facial features that relate to frowning and
smiling, which could have significance when
evaluating interest. It should be noted, however, that
the Action Units might not be completely reliable,
especially in many of the ’No Interest’ cases where
the person is not facing the camera directly. Also, the
reliability of the Action Unit values are noted to
possibly be lower when using the feature extraction
method on sequences containing multiple faces,
which was used for this work, but despite this the
achieved performance of the classifiers was good.
The only previous work found discussing
classification of human interest in a robot (Munoz-
Salinas et al, 2005) used the detection of skin area
based on colour to determine how much interest a
person was showing. This method has two major
limitations. Firstly, the usage of skin colour as a
determining factor is not ideal as discerning in the
case of bald people and people with low contrast
between hair and skin colour can be problematic.
Secondly, face orientation does not necessarily
signify an interest in the robot. Both of these
limitations are addressed with our suggested method.
Including gaze provides a more reliable estimate a
person’s focus and thereby their point of interest.
The interest detection system described above can
have different applications, and it will be primarily
used on our robot for detecting which person in the
robot’s environment is interested in interacting with
it and taking a cup of water which the robot carries.
This detection algorithm will be especially useful in
high traffic noisy situations where we cannot rely on
the verbal communication channel, i.e. speech
recognition, to gauge people’s interest in having a cup
of water.
ACKNOWLEDGEMENTS
This work has been supported by InnovationsFonden
Danmark in the context of the Project “Seamless
huMan-robot interactiOn fOr THe support of elderly
people” (SMOOTH).
REFERENCES
Argyle, M. (1972). Non-verbal communication in human
social interaction.
Mavridis, N. (2015). A review of verbal and non-verbal
human–robot interactive communication. Robotics and
Autonomous Systems, 63, 22-35.
Juel, W. K., Haarslev, F., Ramírez, E. R., Marchetti, E.,
Fischer, K., Shaikh, D., ... & Krüger, N. (2020).
SMOOTH Robot: Design for a novel modular welfare
robot. Journal of Intelligent & Robotic Systems, 98(1),
19-37.
Palinko, O., Fischer, K., Ruiz Ramirez, E., Damsgaard
Nissen, L., & Langedijk, R. M. (2020, March). A
Drink-Serving Mobile Social Robot Selects who to
Interact with Using Gaze. In Companion of the 2020
ACM/IEEE International Conference on Human-Robot
Interaction (pp. 384-385).
Baltrušaitis, T., Robinson, P., & Morency, L. P. (2016,
March). Openface: an open source facial behavior
analysis toolkit. In 2016 IEEE Winter Conference on
Applications of Computer Vision (WACV) (pp. 1-10).
IEEE.
Hjortsjö, C. H. (1969). Man's face and mimic language.
Studentlitteratur.
Argyle, M., & Cook, M. (1976). Gaze and mutual gaze.
Palinko, O., Rea, F., Sandini, G., & Sciutti, A. (2015,
November). Eye gaze tracking for a humanoid robot. In
2015 IEEE-RAS 15th International Conference on
Humanoid Robots (Humanoids) (pp. 318-324). IEEE.
Munoz-Salinas, R., Aguirre, E., García-Silvente, M., &
González, A. (2005). A fuzzy system for visual
detection of interest in human-robot interaction. In 2nd
International Conference on Machine Intelligence
(ACIDCA-ICMI’2005) (pp. 574-581).
Palinko, O., Rea, F., Sandini, G., & Sciutti, A. (2016,
October). Robot reading human gaze: Why eye tracking
is better than head tracking for human-robot
collaboration. In 2016 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS)
(pp. 5048-5054). IEEE.
Zhang, Y. (Ed.). (2010). New advances in machine
learning. BoD–Books on Demand.
Ekman, R. (2012). What the face reveals: Basic and applied
studies of spontaneous expression using the Facial
Action Coding System (FACS).
HUCAPP 2021 - 5th International Conference on Human Computer Interaction Theory and Applications
204
