
Bio-Inspired Protocols for Embodied Multi-Agent Systems
Vinicius Souza de Jesus
1 a
, Carlos Eduardo Pantoja
1 b
, Fabian Manoel
1 c
, Gleifer Vaz Alves
2 d
,
Jose Viterbo
3 e
and Eduardo Bezerra
1 f
1
Centro Federal de Educac¸
˜
ao Tecnol
´
ogica Celso Suckow da Fonseca (CEFET/RJ), Rio de Janeiro, RJ, Brazil
2
Universidade Tecnol
´
ogica Federal do Paran
´
a (UTFPR), Ponta Grossa, PR, Brazil
3
Universidade Federal Fluminense (UFF), Niter
´
oi, RJ, Brazil
Keywords:
Bio-Inspired Protocol, Embodied MAS, Ecological Relations.
Abstract:
Bio-Inspired approaches and techniques are being used in different domains and applications in artificial in-
telligence, including the agent domain. Some agents are able to move from one system to another to establish
new relationships. In biology, ecological relations are concepts responsible for classifying the relationships
between living beings in an ecosystem, depending on the behavior and function that each one can assume.
The objective of this work is to propose bio-inspired protocols based on ecological relations: Predation, In-
quilinism, and Mutualism. These protocols aims to preserve agents’ knowledge as they can live as a tenant
in another physical body waiting for a similar hardware to predate, or acquire and transmit knowledge by
interacting with other agents while sharing the same physical body. To validate these protocols, a study case
and a scenario are implemented, tested, and evaluated in a real environment.
1 INTRODUCTION
The biology has inspired in so many ways Computer
Science and Artificial Intelligence fields contributing
to the development of new concepts, algorithms, and
techniques capable of improving learning capabili-
ties and social organization applied in different do-
mains of applications. Intelligent systems can be-
come increasingly efficient by applying bio-inspired
approaches in their performance and group work for
achieving goals (Zedadra et al., 2016).
The agent approach also has some similarities
with biology concepts, such as reasoning, cogni-
tion, and interactions between agents. The agents
are independent and proactive entities with cogni-
tive ability to make decisions based on what they
can perceive in the environment and communicate
with other agents. Multi-Agent Systems (MAS) are
composed of multiples agents interacting with each
a
https://orcid.org/0000-0002-4534-6078
b
https://orcid.org/0000-0002-7099-4974
c
https://orcid.org/0000-0003-0614-0592
d
https://orcid.org/0000-0002-5937-8193
e
https://orcid.org/0000-0002-0339-6624
f
https://orcid.org/0000-0001-9177-5503
other, and they are capable of solving situations col-
lectively (Wooldridge, 2000).
Some MAS can be closed or opened depending
on the characteristics that agents can assume. An
open MAS allows agents to enter, interact, and leave
it in anytime. It provides that agents from a MAS
can share knowledge (beliefs, intentions, plans, and
goals), and help each other to achieve a common goal
(Huynh et al., 2006) in another MAS. It can reduce
the number of messages exchanged using an exter-
nal infrastructure in case of MAS in distant locations,
since an agent moves itself to a specific MAS instead
of sending messages using a network connection, for
example. Therefore, an open MAS intrinsic leads to
agents capable of moving from one MAS to another.
In biology, ecological relations define and explain
how interactions between living beings occur in an
environment. These relationships happen among liv-
ing beings of the same species or not, and it allows
members of a particular community of living beings
to relate to other ones from different communities, ex-
panding the relationships to an ecosystem level (Be-
gon et al., 2006). Similarly, an open MAS allows the
entrance and the exit of agents in its system, enabling
a dynamic integration of new agents with the existing
ones (Huynh et al., 2006).
312
Souza de Jesus, V., Pantoja, C., Manoel, F., Alves, G., Viterbo, J. and Bezerra, E.
Bio-Inspired Protocols for Embodied Multi-Agent Systems.
DOI: 10.5220/0010257803120320
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 1, pages 312-320
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

We assume the existence of an Embodied MAS,
which is a physical device composed of resources,
controlled by an embedded open MAS. It can be com-
pared to an Embodied agent (Rickel and Johnson,
2000), which is a single agent incorporated in a phys-
ical device. However, the agent is not part of an em-
bedded MAS. Then, one can define an ecosystem for
Embodied MAS as a group of Embodied MAS situ-
ated in a physical environment, and capable of com-
municating and interacting with each other.
There are related works inspired by biology con-
cepts in the agent domain to provide techniques and
algorithms to increase the level of interaction and
communication between MAS that act upon the same
environment (G
¨
unay et al., 2015), allowing agents of
different systems to communicate and interact. A for-
aging situation (search of food resources based on
survival instincts) (Zedadra et al., 2016) is presented
where different open MAS act upon a simulated envi-
ronment. It allows agents from different MAS to in-
teract and perform complex tasks. These works do not
consider the risks of dealing with a real environment.
Since the real environment is unpredictable, they do
not offer mechanisms to preserve the integrity of the
agents’ knowledge in case of some incident.
This work proposes three protocols inspired by
ecological relations for transferring agents between
distinct Embodied MAS. The embedded open MAS
of the Embodied MAS has agents that can enter or
leave in a synchronized way depending on the proto-
col activated. The protocols allows Embodied MAS
to preserve their acquired knowledge during a situa-
tion where a menace exists or even if its physical parts
are damaged. Besides, it is possible to exchange their
knowledge by moving part of their systems to a host
for learning or sharing abilities. The main contribu-
tion is an architecture to create and assemble phys-
ical devices using embedded MAS capable of trans-
ferring agents using protocols inspired by ecological
relations.
The remainder of this paper is organized as fol-
lows. In section 2 the related works are discussed, in
section 3 is presented the the bio-inspired protocols
with each ecological relations implemented. Next, in
section 4 shows the formalization for the bio-inspired
protocols, in section 5 is presented the prototype used
in the experimental evaluation and the results of the
performed tests, and Section 6 shows the conclusion.
2 RELATED WORKS
Some works already use the bio-inspired techniques
and Multi-Agent Systems applied in real environ-
ment (Ferri et al., 2006; Chen et al., 2009). New tech-
nologies and methodologies have emerged (Zeghida
et al., 2018; G
¨
unay et al., 2015) inspired by biology
and aiming to improve the usage of Open MAS.
A framework (G
¨
unay et al., 2015) allows agents
to create a compromise protocol dynamically at run-
time, which allows the agents to change a compro-
mise assumed in the MAS’s design time or assume a
new one. Considering open MAS, this dynamic pro-
tocol allows agents transferred to another MAS to cre-
ate new compromises and update those in the original
MAS at runtime to these agents to better adapt to the
current MAS. Considering bio-inspired MAS, there
is a generic multi-paradigm model for bio-inspired
systems (Zeghida et al., 2018) to compare an agent
with a living being giving them some abilities that
the living being has. These abilities, such as evolu-
tion, self-correction, and decentralized control, im-
prove the agents’ capability to acquire new knowl-
edge and autonomy. Although, if the MAS is dam-
aged, these agents can not preserve their knowledge.
A bio-inspired foraging algorithm is presented in-
volving agents that can cooperate and perform com-
plex tasks by breaking them down into small and sim-
ple sub-tasks (Zedadra et al., 2016). It character-
izes the act of capturing and searching for food in
a particular storage location. Despite being a bio-
inspired application and allowing communication be-
tween agents from different MAS, this work does not
have a mechanism for preserving agents’ knowledge,
so if the MAS is damaged, all knowledge will be lost.
In order to employ MAS in a real environment,
it is necessary to have architectures that allow agents
to communicate with physical devices and a network
for providing a communication channel with others
MAS. ARGO is a customized architecture that inte-
grates microcontrollers and agents to automatically
perform actions and capture percepts in a real envi-
ronment. ARGO agents share the same architecture
of a Jason agent (Bordini et al., 2007), but they can
interface hardware components. This type of agent
cannot communicate with agents from other MAS,
since Jason framework only provide Closed MAS.
For this, Communicator agents uses an IoT architec-
ture and middleware that allow establishing commu-
nication from this specific type of agent with another
one of the same type hosted in another MAS. Con-
sidering these agents’ characteristics, they can be ex-
ploited to build an approach where an Open MAS
could communicate with other Open MAS, includ-
ing transferring agents based on some ecological rela-
tions implemented by the bio-inspired protocols pro-
posed. These protocols deal with issues that eventu-
ally arise in a physical environment to preserve and
Bio-Inspired Protocols for Embodied Multi-Agent Systems
313

share knowledge.
The open MAS approaches are gaining more im-
portance in the agents’ literature, allowing differ-
ent agents from different MAS to communicate, ex-
change knowledge, and transfer themselves to another
MAS (Golpayegani et al., 2019; Amaral and H
¨
ubner,
2019). Therefore, the open MAS literature is con-
cerned with organizational structure after an agent
transference and the interaction between a transferred
agent and the destination MAS agent. Some questions
such as how will agents be transferred? Why trans-
fer agents? are not being answered, and these issues
are being explored in this work using bio-inspired
protocols for transferring agents aiming at preserving
agents’ knowledge.
3 BIO-INSPIRED PROTOCOLS
This section discusses the bio-inspired protocol pro-
posed based on ecological relations (inquilinism, pre-
dation, and mutualism) to be used along with Embod-
ied MAS. Besides, in section 3.1, we show the details
of engineering the protocols and how their execution
behaves.
In biology, ecological relations (Howe et al.,
1988) are the domain dedicated to explain how liv-
ing beings relate to each other within an environment.
For example, some species can live in collaboration
with other species in the same environment where
both of them get a win-win situation with this inter-
action, or they can compete for resources or life exis-
tence. These interactions occur in a determined place
where several communities of living beings constitute
a balanced and self-sufficient system named ecosys-
tem (Begon et al., 2006). There are several ecological
relations, nevertheless, discussing all of them is out of
the scope of this work. However, three relations have
characteristics that we point to be useful for agents:
Predation, Inquilinism, and Mutualism.
Since MAS are composed of several agents inter-
acting for achieving commons objects or even com-
peting for the same resources in an environment, and
each of them may have roles in the system, then we
could consider that MAS can be interpreted as a com-
munity of agents (Rickel and Johnson, 2000). Fur-
thermore, once it is possible to consider a MAS as
a community of agents, we can extend this concept,
in this work, to be applied to Embodied MAS, which
contains a community of agents responsible for con-
trol physical resources and interacts with other Em-
bodied MAS in a real-world environment (Pantoja
and Viterbo, 2017). Once different Embodied MAS
can interact with each other, one must consider that
they are part of an ecosystem of Embodied agents.
We can define an Embodied MAS as a physical
device operated by an embedded open MAS com-
posed of multiples agents playing different roles.
Physical agents are responsible for interfacing phys-
ical resources for gathering sensing information and
acting in the real world. Besides, they have the ca-
pability of sharing the collected information to other
agents in the open MAS. The Communicator is a
unique agent responsible for all the external interac-
tions (including mobility). It is also responsible for
activating the bio-inspired protocols. Finally, there
are Traditional agents without any dedicated ability
other than internal communication and interaction be-
tween all types of agents. Based on this definition,
we assert that these Embodied MAS can make use or
be affected by some of the ecological relations men-
tioned before. In Table 1, it is shown a comparison
between the ecological relations from biology and our
proposed bio-inspired protocols.
The ecological relations are represented as a set
of transfer protocols activated by an Embodied MAS
to provide a mechanism for Communicator agents
to interact with Communicator agents from others
Embodied MAS for transferring agents and preserv-
ing knowledge. How they interact will establish the
ecological relation adopted. For example, in situa-
tions where an Embodied MAS has its physical re-
sources damaged but it contains valuable information
(its mental state), it can activate a protocol for trans-
ferring itself to an existing Embodied MAS with the
same physical resources, taking full control of it. If
the resources are not the same, it can co-exist with
the target Embodied MAS by interacting and learning
from its agents, or it can wait for a new Embodied
MAS appear in the ecosystem with the same kind of
resources to get control over it.
An Embodied MAS (Sender) activates a protocol
for transferring its agents to another Embodied MAS
(Receiver) in these situations. The Sender saves all
agents’ mental states that will be transferred and us-
ing the Communicator agent transfers them to the Re-
ceiver. This step is common for all protocols.
The final step depends on which protocol has been
activated. In the predation protocol, all the agents
will be copied from the Sender Embodied MAS —
with their actual mental state — and sent to another
Embodied MAS. All agents of the Sender and Re-
ceiver Embodied MAS will be killed, and the agents
received from the Sender Embodied MAS will be ini-
tialized in the Receiver Embodied MAS. In the in-
quilinism protocol, all agents from the Sender Em-
bodied MAS is sent to the Receiver Embodied MAS,
where they co-exist with the existing ones. In this
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
314
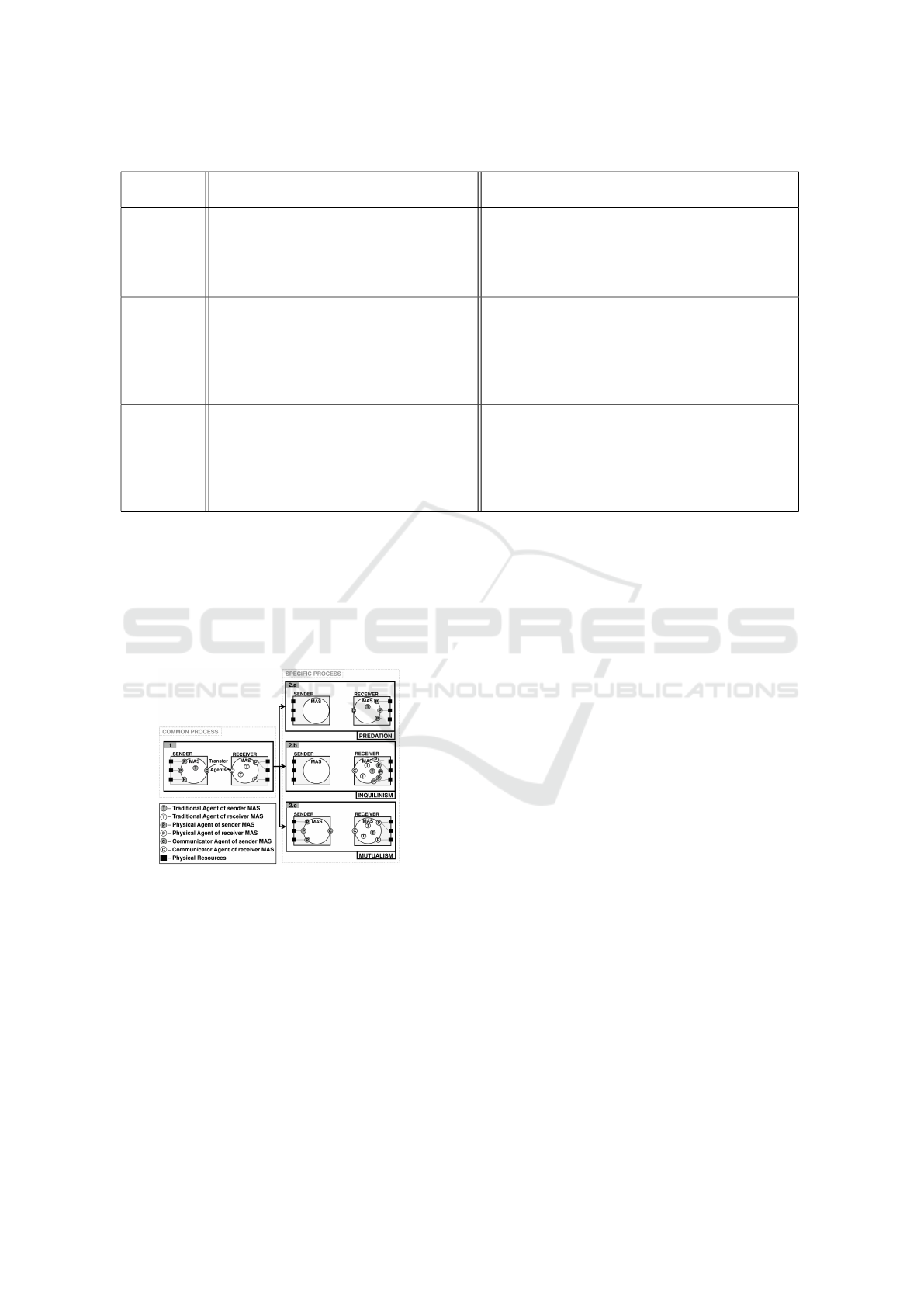
Table 1: Comparison of the ecological relations definition by biology and the ecological relations in the bio-inspired protocols.
Ecological
relations
For biology (Begon et al., 2006) For bio-inspired protocols
Predation Predation is an inharmonious relation-
ship, where a living being (the predator)
uses of its instincts to hunt and prey on
another living being (the prey).
In the predation relation, all agents are trans-
ferred to another Embodied MAS with the inten-
tion of predating and dominating the second one
eliminating its existing agents to get control of
its physical resources.
Inquilinism Inquilinism is a harmonious relationship,
where a living being (host) serves as
shelter for another one (tenant) without
being harmed. The tenant uses the host’s
body for protection permanently or tem-
porarily.
In the inquilinism relation, an Embodied MAS
sends all its agents to another one for protection
and shelter until a similar Embodied MAS be
identified. Besides, the transferred agents can-
not interfere in the other agents’ activities.
Mutualism Mutualism is a harmonious relationship,
where both living beings involved in the
relationship benefit from it. This mu-
tual benefit becomes indispensable for
the survival of the involved in the rela-
tionship.
In the mutualism relation, an Embodied MAS
can send an agent, a group of agents, or the en-
tire MAS to another Embodied MAS to learn
or transmit knowledge. The transferred agents
should co-exist during a specific time, and then
they return to their original Embodied MAS.
case, all agents from the Sender Embodied MAS are
killed. Finally, the mutualism protocol, an agent or a
group of agents will be sent to the Receiver Embod-
ied MAS to exchange knowledge in loco. After that,
these agents should get back to the Sender Embodied
MAS and no agents are killed. The process of activat-
ing the protocols is described in Figure 1.
Figure 1: Transport of agents using the bio-inspired proto-
col.
3.1 Implementing the Bio-Inspired
Protocols
This section describes the proposed bio-inspired pro-
tocol’s implementation, explaining each ecological
relation in the protocol (predation, inquilinism, and
mutualism), and how they are activated. For activat-
ing and executing a protocol, it is necessary to em-
ploy a reliable communication infrastructure where
agents from one Embodied MAS can exchange in-
formation or move to another Embodied MAS. The
ContextNet middleware provides a server-side com-
munication layer using the Scalable Data Distribu-
tion Layer (SDDL) middleware (Endler et al., 2011),
which extends the OMG’s standard Data Distribution
Service (DDS) addressing real-time applications and
embedded systems. It allows multiples devices con-
necting to a network at the same time, dealing with all
network issues such as reconnection and scalability.
Considering this, ContextNet allows multiple Em-
bodied MAS to connect in the same communication
infrastructure for interacting and exchanging informa-
tion. Besides, an Embodied MAS uses ContextNet to
communicate with other Embodied MAS, it can have
some agents capable of moving to another Embodied
MAS, and it also performs a bio-inspired protocol.
This work uses the Jason framework (Bordini
et al., 2007) for programming the embedded open
MAS because it is a well-explored platform and has
a customized agent architecture capable of control-
ling physical resources named ARGO (Pantoja et al.,
2016) to allow programming Physical agents. The
Jason has another customized agent architecture ca-
pable of communicating using the middleware Con-
textNet, an agent with this architecture is named Com-
municator (Pantoja et al., 2018). However, the Jason
does not have a mechanism to transfer agents.
Therefore, we extend the Communicator agent ar-
chitecture to create Open MAS to send and receive
agents from other MAS using the ContextNet. With
ARGO and Communicator agent extended architec-
ture, it is possible to have multiple Embodied MAS
coexisting in the same physical environment con-
Bio-Inspired Protocols for Embodied Multi-Agent Systems
315

nected to a communication infrastructure, character-
izing an Embodied MAS ecosystem. When a bio-
inspired protocol is activated, the Sender Embodied
MAS saves the current mental state (all beliefs, in-
tentions, plans, and goals) of each agent that will be
transferred. It creates a file to be transferred and used
to initialize these agents in the Receiver Embodied
MAS. Finally, the Receiver Embodied MAS identifies
the protocol type that must be activated and execute.
In the inquilinism protocol, all agents are trans-
ferred, but they are only hosts in the Receiver MAS.
They cannot perform any action, and it is only possi-
ble to interact with existing agents. In the predation,
all Sender MAS’ agents are transferred as well; but it
dominates the Receiver MAS, and all its native agents
are killed, remaining only the agents transferred. In
both past protocols, the Sender Embodied MAS is
deleted for security and privacy purposes. In the mu-
tualism protocol, one or more agents are moved to
another Embodied MAS to learn new skills and then
return after the learning process is over. Afterward,
independently of the protocol chosen, all agents trans-
ferred are instantiated in the Receiver MAS.
To activate the bio inspired protocol, it was de-
veloped an internal action — it is an action that an
agent can perform that does not affect the environ-
ment in Jason framework (Bordini et al., 2007) —
named .moveout. To perform this internal action is
necessary to pass two or three parameters:
• Identifier: it is the unique identifier of a Commu-
nicator agent. This parameter identifies the Em-
bodied MAS that will receive the agents;
• Ecological Relation: one of the three ecological
relations available that can be used;
• Agent Name: it identifies the agents that will be
sent. It is an optional parameter that is only used
when the mutualism relation is activated. In other
relations, all agents are always transferred.
Once the .moveout internal action is called, two
algorithms are executed. The algorithm 1 is exe-
cuted by the Sender Embodied MAS receiving the
identifier of the Communicator agent from the Re-
ceiver Embodied MAS, the ecological relation, and
the agents’ name in case of mutualism. After that,
all selected agents are prepared to be sent, preserv-
ing their actual mental state (beliefs, plans, intentions,
and goals). For this, it accesses the mental state of
all agents selected at runtime. Then, it sends these
selected agents, and wait for a acknowledgment mes-
sage. If they were instantiated in the Receiver Embod-
ied MAS correctly, these agents are killed, otherwise,
the process is aborted. It is important to remark that
kill all selected agents erases the embedded MAS.
Algorithm 1 : Algorithm of the MAS who active the bio-
inspired protocol (Sender Embodied MAS).
1: procedure trans f erAgents(idReceiverMAS,
ecologicalRelation, [agentName] )
2: selectedAgents ← null
3: if ecologicalRelation = ”Predation” or eco-
logicalRelation = ”Inquilinism” then
4: selectedAgents ← getAgents(all)
5: else
6: if ecologicalRelation = ”Mutualism” then
7: selectedAgents ← getAgents
(agentName)
8: end if
9: end if
10: sendAgents(idReceiverMAS,
ecologicalRelation, selectedAgents)
11: if trans f erence = OK then
12: kill(selectedAgents)
13: else
14: abort()
15: end if
16: end procedure
Considering the Receiver Embodied MAS, the Al-
gorithm 2 starts when the Communicator agent de-
tects the ecological relation to be performed, and the
agents received. Firstly, the algorithm creates and ini-
tializes all the received agents. A message is sent back
if all received agents are initialized correctly or not.
Then, if the ecological relation is the predation, all
existing agents at this moment — that were not trans-
ferred by the ecological relation — are killed.
Algorithm 2: Algorithm of the MAS who receive the agents
transferred with the bio-inspired protocol.
1: procedure receiveAgents(ecologicalRelation,
agentsTransfered)
2: createAndInitialize(agentsTrans f ered)
3: if ecologicalRelation = ”Predation” then
4: updateSerialPorts(agentsTrans f ered)
5: kill(myAgents − agentsTrans f ered)
6: end if
7: end procedure
The Embedded MAS uses ARGO for interfacing
and controlling physical resources and to interact with
a real environment using a physical body. It must be
composed of a microcomputer and one or more mi-
crocontroller; the first is used for hosting the Embed-
ded MAS, and the microcontroller is used for con-
necting electronic components.
A Physical agent using the ARGO can con-
trol multiple microcontrollers; it has each microcon-
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
316

troller’s serial port for accessing the sensors and ac-
tuators. As the serial port is not fixed, it maintains a
belief for each serial port. Therefore, before all agents
are killed in the Receiver MAS, the transferred ARGO
agents update their serial ports using the ports set in
the Receiver ARGO agents. When developing MAS
in real environments, one must consider the unpre-
dictability and the risks that an Embodied MAS can
be exposed to. Agents are continuously learning and
it could become critical as time passes by. A mech-
anism to preserve agents’ knowledge becomes essen-
tial to MAS in a real environment. Our proposed bio-
inspired protocols aim to overcome this situation.
4 FORMALIZATION FOR THE
BIO-INSPIRED PROTOCOLS
In this section the ecological relations with its corre-
sponding use with the agents are formalized.
Definition 4.1 (Bio-inspired Protocol). A Bio-
Inspired Protocol (or Bio TP) is defined by the fol-
lowing 3-tuple:
Bio
TP = hSender, Receiver, APi
where,
• Sender is a MAS comprised by the following sets
of Agents:
Sender = hPA
S
, TA
S
, CA
S
i
where,
PA
S
is a set of n Physical Agents from the
Sender, where n ≥ 0.
TA
S
is a set of n Traditional Agents from the
Sender, where n ≥ 0.
CA
S
is a set with a single agent named Commu-
nicator from the Sender.
• Receiver is a MAS comprised by the following sets
of Agents:
Receiver = hPA
R
, TA
R
, CA
R
i
where,
PA
R
is a set of n Physical Agents from the Re-
ceiver, where n ≥ 0.
TA
R
is a set of n Traditional Agents from the
Receiver, where n ≥ 0.
CA
R
is a set with a single agent named Commu-
nicator from the Receiver, responsible for es-
tablishing the communication between the Re-
ceiver and a given Sender.
• AP (or Activate Protocol): the third element from
the tuple defines which kind of bio-relation will be
executed by the protocol; There are three possible
kinds: Predation, Inquilinism, and Mutualism. As
it follows, we describe these three different proto-
cols executions using set theory formalisation.
1. Predation
PA
R
= PA
S
− PA
R
; TA
R
= TA
S
− TA
R
CA
R
= CA
S
−CA
R
PA
S
=
/
0; TA
S
=
/
0; CA
S
=
/
0
NB-1: In the Predation relation the Sender
takes control over the Receiver. That is the
reason we use difference of sets in the first line
above. In the third line all three sets are as-
signed as empty because the agents from the
Sender should be removed.
2. Inquilinism
PA
R
= PA
S
∪ PA
R
; TA
R
= TA
S
∪ TA
R
CA
R
= CA
S
∪CA
R
PA
S
=
/
0; TA
S
=
/
0; CA
S
=
/
0
NB-2: In the Inquilinism all agents from the
Sender are merged with agents from the Re-
ceiver. That is why we have used union of sets
above. Similarly, in the third line (above) all
three sets are assigned as empty.
3. Mutualism
{PA
R
= PA
S
∪PA
R
;PA
S
= PA
R
∪PA
S
} | PA
R
=
PA
R
{TA
R
= TA
S
∪ TA
R
;TA
S
= TA
R
∪ TA
S
} |
TA
R
= TA
R
CA
R
= CA
R
;
NB-3: In the Mutualism there is an option that
could be selected for the new set of PA
R
and
TA
R
, i.e., it may occur a merge of sets (us-
ing union of sets) or the Sender’s agents may
remain in the Sender and they are not trans-
ferred to the Receiver. Besides all Sender’s
agents should be preserved, thus there is no
empty set operation. Notice that in case the
agents from the Sender have been sent to the
Receiver, then at some point, they should be
sent back to the Sender. This is represented by
the operations placed between brackets.
5 PROTOTYPE: DESIGNING AND
TESTING
This section presents the tests and results of the bio-
inspired protocols proposed. The tests use the concept
of autonomous underwater vehicles for each of the
Bio-Inspired Protocols for Embodied Multi-Agent Systems
317
proposed bio-inspired protocols. Autonomous Un-
derwater Vehicles (AUV) (Cruz, 2011) are crewless
vehicles with internal processing that autonomously
perform actions based on sensors’ information. AUV
are regularly used to explore the sea’s areas where hu-
mans cannot go. Considering this, our mechanism for
preserving the collected information could become
vital. The tests performed in this work show scenarios
where each bio-inspired protocol can be applied in an
AUV application as an Embodied MAS.
The first scenario is characterized by two Embod-
ied MAS with exactly the same hardware exploring a
new sea area. One of these Embodied MAS (Leader)
has more important knowledge than the other (Sol-
dier). During the exploration, the Leader’s AUV is
damaged, and to protect the integrity of its knowl-
edge, it activates the bio-inspired protocol using the
predation relation and preys the Soldier. The sec-
ond scenario the Soldier’s AUV is damaged and has
more important knowledge than the Leader Embodied
MAS. Hence, the Soldier activates the bio-inspired
protocol with the inquilinism relation to transfer all its
agents to the Leader and remains tenant until another
AUV with the same hardware is available to the Sol-
dier control. Since it is the Soldier, and by hierarchy
purposes, it cannot prey its Leader. In the third sce-
nario, a new Embodied MAS (Student AUV) is sent
on an exploration mission with a more experienced
Embodied MAS (Teacher AUV), who knows the most
part of the area explored. In this case, the Student ac-
tivates the bio-inspired protocol with the mutualism
relation for sending a group of agents to the Teacher
to learn; afterwards, they return to the student MAS
with the knowledge acquired to perform a better ex-
ploration.
Two prototypes of autonomous vehicles were de-
veloped. These vehicles are equals considering the
hardware composition, and each one is composed of 1
Raspberry pi zero microcomputer and 1 Arduino Uno.
Besides, they employ 1 luminosity sensor (LDR), 1
temperature sensor (LM35), 2 white LEDs, 2 DC 3-
6V motors (1 for each wheel), 1 H bridge driver mod-
ule (L298N), and 2 power banks (one for the micro-
computer and the other for the microcontroller). All
these components are interconnected in a circuit com-
posed of resistors and capacitors connected to the Ar-
duino Uno. In figure 2 shows the prototypes.
5.1 Test Results
All developed MAS for the test scenarios had ver-
sions with different amount of agents — 10, 30, and
50 agents — to check if exists interference in the
transfer speed. Besides, we tested the effectiveness
Figure 2: Car prototypes for testing in a real world.
of performing the agents’ transferring and checked if
the agents’ knowledge was preserved. Considering
that all agents are always transferred in the predation
and inquilinism relations, the tests with mutualism as-
sumed the worst-case transferring all agents.
For each scenario, all MAS versions (10, 30, and
50 agents) were tested 10 times, resulting in 30 tests
per scenario and 90 tests combining all three sce-
narios. Moreover, an internet with 5 Mbps speed
was used for the ContextNet middleware to create the
communication infrastructure. The Table 2 shows the
transfer speed average for each scenario including the
ecological relation applied. Finally, the efficiency of
transport and knowledge preservation is shown.
Table 2: A comparative table considering the three scenar-
ios.
Time to complete
Eco. Rel. 10
Ag.
20
Ag.
50
Ag.
Eff.
Predation 0.43 s 0.74 s 1.46 s 100%
Inquilinism 0.39 s 0.70 s 1.03 s 100%
Mutualism 0.38 s 0.69 s 1.03 s 100%
When analyzing the results, we conclude that the
number of agents directly interferes with the proto-
cols’ execution. When the protocol sends multiples
agents to another MAS, it must access the entire base
of beliefs, desires, intentions, and plans of each agent
to transport. After that, when these agents arrive at
the Receiver MAS, they are instantiated individually.
Considering the scenarios and the results, we con-
clude that the predation is more appropriate when
the Embodied MAS hardware is damaged, and it still
needs to continue logically operating, not only saving
the agents’ knowledge because this relation is slower
than the others and requires another Embodied MAS
with exact the same hardware. The inquilinism suits
in cases where the Embodied MAS’s hardware is de-
teriorating, there is no other similar hardware, or there
is no need for it to remain operational. The main goal
is to preserve the agents’ knowledge. This relation is
one of the fastest and can be performed independently
of the MAS physical configuration.
Finally, the mutualism relation is appropriate for
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
318

cases where the Embodied MAS needs to learn new
knowledge, and when communicating does not apply
or is not secure. For example, when installing a new
sensor in the AUV scenario, the student MAS sends
a physical agent to the teacher MAS to learn with its
physical agents. Then, the transferred agent returns
with the knowledge to operate the sensor.
6 CONCLUSION
This work presented bio-inspired protocols for Em-
bodied MAS inspired by ecological relations. It
shows the importance of preserving the integrity of
the agents’ knowledge depending on the situation that
an Embodied MAS could be exposed to when it is
inserted in real environments where maintaining the
knowledge can be crucial to the mission’s success.
Three protocols based on ecological relations
were implemented: Predation, Mutualism, and In-
quilinism. In predation, all agents of a MAS is trans-
ferred to another MAS to dominate it. In this situa-
tion, the Sender MAS has crucial knowledge in a mis-
sion; nevertheless, it is physically damaged, then they
transfer their agents to a MAS with similar hardware
and dominates it. In mutualism, some MAS agents
can be transferred to another MAS to learn or ex-
change knowledge. After that, they can return to the
Sender MAS to share the new knowledge acquired
during the transference. In Inquilinism, all agents
from the Sender MAS are transferred to another MAS
to preserve their knowledge without dominating it.
As future work, we aim to implement an ecosys-
tem of Embodied MAS in the computer lab of our
university to broaden the testing environment and the
number of devices involved. Moreover, a new feature
called the dominance degree is being developed. The
degree of dominance maps all possible predation re-
lation between Embodied MAS. Thus, an Embodied
MAS with less dominance degree can not prey on the
other, but the bio-inspired protocol will automatically
change the relation to inquilinism if it tries.
REFERENCES
Amaral, C. J. and H
¨
ubner, J. F. (2019). Goorg: Automated
organisational chart design for open multi-agent sys-
tems. In International Conference on Practical Ap-
plications of Agents and Multi-Agent Systems, pages
318–321. Springer.
Begon, M., Townsend, C. R., and Harper, J. L. (2006). Ecol-
ogy: from individuals to ecosystems. Blackwell Pub-
lishing.
Bordini, R. H., H
¨
ubner, J. F., and Wooldridge, M. (2007).
Programming Multi-Agent Systems in AgentSpeak us-
ing Jason. John Wiley & Sons Ltd.
Chen, B., Cheng, H. H., and Palen, J. (2009). Integrating
mobile agent technology with multi-agent systems for
distributed traffic detection and management systems.
Transportation Research Part C: Emerging Technolo-
gies, 17(1):1–10.
Cruz, N. (2011). Autonomous underwater vehicles. BoD–
Books on Demand.
Endler, M., Baptista, G., Silva, L., Vasconcelos, R.,
Malcher, M., Pantoja, V., Pinheiro, V., and Viterbo,
J. (2011). Contextnet: context reasoning and shar-
ing middleware for large-scale pervasive collaboration
and social networking. In Proceedings of the Work-
shop on Posters and Demos Track, page 2. ACM.
Ferri, G., Caselli, E., Mattoli, V., Mondini, A., Mazzolai,
B., and Dario, P. (2006). A biologically-inspired al-
gorithm implemented on a new highly flexible multi-
agent platform for gas source localization. In Biomed-
ical Robotics and Biomechatronics, 2006. BioRob
2006. The First IEEE/RAS-EMBS International Con-
ference on, pages 573–578. IEEE.
Golpayegani, F., Dusparic, I., and Clarke, S. (2019). Using
social dependence to enable neighbourly behaviour in
open multi-agent systems. ACM Transactions on In-
telligent Systems and Technology (TIST), 10(3):1–31.
G
¨
unay, A., Winikoff, M., and Yolum, P. (2015). Dynam-
ically generated commitment protocols in open sys-
tems. Autonomous Agents and Multi-Agent Systems,
29(2):192–229.
Howe, H. F., Westley, L. C., et al. (1988). Ecological re-
lationships of plants and animals. Oxford University
Press.
Huynh, T. D., Jennings, N. R., and Shadbolt, N. R. (2006).
An integrated trust and reputation model for open
multi-agent systems. Autonomous Agents and Multi-
Agent Systems, 13(2):119–154.
Pantoja, C. E., Soares, H. D., Viterbo, J., and El Fallah-
Seghrouchni, A. (2018). An architecture for the de-
velopment of ambient intelligence systems managed
by embedded agents. In SEKE, pages 215–214.
Pantoja, C. E., Stabile Jr, M. F., Lazarin, N. M., and Sich-
man, J. S. (2016). Argo: A customized jason ar-
chitecture for programming embedded robotic agents.
Fourth International Workshop on Engineering Multi-
Agent Systems (EMAS 2016).
Pantoja, C. E. and Viterbo, J. (2017). Prototyping ubiqui-
tous multi-agent systems: A generic domain approach
with jason. In International Conference on Practi-
cal Applications of Agents and Multi-Agent Systems,
pages 342–345. Springer.
Rickel, J. and Johnson, W. L. (2000). Task-oriented collab-
oration with embodied agents in virtual worlds. Em-
bodied conversational agents, pages 95–122.
Wooldridge, M. J. (2000). Reasoning about rational agents.
MIT press.
Zedadra, O., Seridi, H., Jouandeau, N., and Fortino, G.
(2016). A cooperative switching algorithm for multi-
Bio-Inspired Protocols for Embodied Multi-Agent Systems
319

agent foraging. Engineering Applications of Artificial
Intelligence, 50:302–319.
Zeghida, D., Meslati, D., and Bounour, N. (2018). Bio-ir-m:
A multi-paradigm modelling for bio-inspired multi-
agent systems. Informatica, 42(3).
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
320
