
Direct Model-checking of SysML Models
Alessandro Tempia Calvino
1,2
and Ludovic Apvrille
1
1
LTCI, Telecom Paris, Institut Polytechnique de Paris, Sophia-Antipolis, France
2
Ecole Polytechnique Federale de Lausanne, Lausanne, Switzerland
Keywords:
SysML, Model-checking, Formal Verification, Embedded Systems.
Abstract:
Model-checking intends to verify whether a property is satisfied by a model, or not. Model-checking of
high-level models, e.g. SysML models, usually first requires a model transformation to a low level formal
specification. The present papers proposes a new model-checker that can be applied (almost) directly to the
SysML model. The paper first explains how this model-checker works. Then, we explain how it can efficiently
check CTL-like properties. Finally, the paper discusses the performance of this model-checker integrated in
the TTool framework.
1 INTRODUCTION
Tools for designing critical systems with
UML/SysML usually offer a way to either sim-
ulate the model or to perform verification from
the models. Simulation helps understanding and
debugging the model, while formal verification offers
strong guarantees on the system. Typical properties
that are verified are the absence of deadlocks, the non
reachability of error states, and the reachability or
liveness of all expected model elements.
UML/SysML tools usually rely on external veri-
fication tools (e.g. model-checkers) to perform for-
mal proofs. Commonly, the model to verify is first
translated to an intermediate formal specification (e.g.
in UPPAAL
1
) before being checked against proper-
ties, also expressed in a formal language (e.g. CTL).
Finally, results are traced back to the model. The
transformation to a formal specification impacts the
performance, raises semantic issues, and makes the
backward transformation less obvious. For instance,
UPPAAL supports only 16-bit integer, so if the origi-
nal model relies on 32-bit integer, there is a seman-
tic gap between the original model and the formal
specification. Similarly, communication semantics of
the model (infinite/finite FIFO, synchronization, etc.)
sometimes force to ignore some operators or to trans-
late them in an approximate way.
To tackle this issue, we introduce in this paper
a new model-checker that can directly work from a
SysML model. We assume the structure of the sys-
1
http://www.uppaal.org/
tem is described with block definition diagrams and
internal block diagrams. The behavior of each block
is described with SysML state machines. Our model-
checker is SysML-aware in the sense that it directly
works with blocks, ports of blocks, connectors be-
tween ports, states, guards, actions, etc. The pa-
per shows how the model-checker works, and how it
can prove CTL-like properties (reachability, liveness,
leads to, deadlock freeness) from a SysML model,
and outputs counterexamples when a property is not
satisfied. We also show that our model-checker com-
pares to UPPAAL in terms of performance, while
avoiding model transformations.
Section 2 presents similar contributions. Sec-
tion 3 introduces the SysML profile (AVATAR) at the
root of the present work. Section 4 introduces the
model-checker and explains its main features. Then,
section 5 shows how properties can be described in
SysML and evaluated with the model-checker. Sec-
tion 6 presents the main implementation tricks to en-
hance performance, and compares our model-checker
to UPPAAL. Section 7 concludes the paper.
2 RELATED WORK
2.1 Systems Analysis
Systems analysis can be performed using different
techniques. The latter can be classified into dif-
ferent categories, including emulation (Thiele et al.,
216
Calvino, A. and Apvrille, L.
Direct Model-checking of SysML Models.
DOI: 10.5220/0010256302160223
In Proceedings of the 9th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2021), pages 216-223
ISBN: 978-989-758-487-9
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2007), implementation (Thiele et al., 2007), simula-
tion (Stemmer et al., 2019) (Thiele et al., 2007) or hy-
brid analysis which combines formal and simulation
approaches (Stemmer et al., 2019).
Simulation and formal approaches are the most
used ones in the domain of performance estimation of
embedded systems (Thiele et al., 2007) (Viehl et al.,
2006). Simulation tools and industrial frameworks
e.g. Koski (Kangas et al., 2006) can only consider
a limited set of execution traces and corner cases are
usually unknown (Thiele et al., 2007). Formal ap-
proaches like timed automata are usually limited in
scope to the model under analysis where sharing of re-
sources, leading to complex interactions among com-
ponents, is difficult to take into consideration.
To overcome the limitations encountered when us-
ing either methods, (Thiele et al., 2007) and (Viehl
et al., 2006) combined simulation and formal ap-
proaches to analyze system performance.
2.2 Formal Verification of UML/SysML
Models
Transforming UML/SysML models to a formal spec-
ification is a very popular (and old) way to ensure
the (formal) verification of these models, as first dis-
cussed in (Bruel, 1998), and more recently in (Gab-
meyer, 2019) where they have proposed a taxonomy
of formal verification techniques for software models
with a focus on recent papers addressing simulation
and formal verification in the context of SysML.
Delatour et al. were among the first to pro-
pose a formal way to verify UML models with Petri
Nets (Delatour and Paludetto, 1998). Laleau et al.
discussed in (Laleau and Mammar, 2000) the use of
annotations in UML so as to generate a B specifi-
cation. Also, in (Sch
¨
afer et al., 2001), Sch
¨
afer et
al. proposed a translator from UML state machines
to UPPAAL. Time was also addressed in (Apvrille
et al., 2004) with a transformation from UML to RT-
LOTOS. The model-based environment TimeSquare
(DeAntoni and Mallet, 2012), supporting the Clock
Constraint Specification Language (CCSL), provides
facilities for (formal) performance analysis, in partic-
ular for the analysis of execution traces. In (Ouchani
et al., 2013), Ouchani et al. presented a formal veri-
fication framework for checking SysML activity di-
agrams. The latter are mapped into the input lan-
guage of the probabilistic model checker PRISM. A
calculus dedicated to activity diagrams is proposed
and the mapping to PRISM is formalized. The ap-
proach is applied to an online shopping system and to
real time streaming protocols. (Ando et al., 2013) pro-
posed to formalize SysML state machines with CSP#.
(Wang et al., 2019) et al. explored the transforma-
tion of SysML models to NuSMV for safety analysis.
They applied their approach to a flap control system.
Yet, they did not propose any backtracing way. In
the present paper, model checking is applied to block
and state machine diagrams: block diagrams capture
the architecture of the system while state machine di-
agrams model the inner behavior of blocks.
3 CONTEXT: TTOOL, AVATAR
3.1 TTool
TTool is a free and open source framework targeting
the design of embedded systems with UML/SysML.
It supports different methodological stages, including
system analysis (requirements, fault and attack trees,
use cases, sequence diagrams, . . . ), system hardware
/ software partitioning with the DIPLODOCUS pro-
file (Apvrille et al., 2006), and embedded software de-
sign with the AVATAR SysML environment (Apvrille
et al., 2020). SysML-Sec (Apvrille and Li, 2019)
is also supported by TTool. SysML-Sec gathers
together all methodological stages and adds secu-
rity features (operators, formal proof) to diagrams.
The model-checker presented in this paper concerns
AVATAR models. Yet, we intend to extend it to the
DIPLODOCUS environment.
3.2 AVATAR
In this paper, by AVATAR, we mean the design part
of AVATAR. A design is built upon 3 diagrams:
• A block definition diagram.
• A internal block diagram. To make the structure
of the design easier to visualize, block definition
and internal block diagrams can be showed in the
same view.
• State machine diagrams are used to give a behav-
ior to each block.
3.2.1 Extensions to SyML
AVATAR extends standard SysML as follows:
• Block diagrams support synchronous and asyn-
chronous communications with different flavors
(lossy, non lossy, etc.).
• State machines are extended with an after(min,
max) clause, with timer operators (set, expire, re-
set), and with a “x = random(min, max)” operator.
Direct Model-checking of SysML Models
217
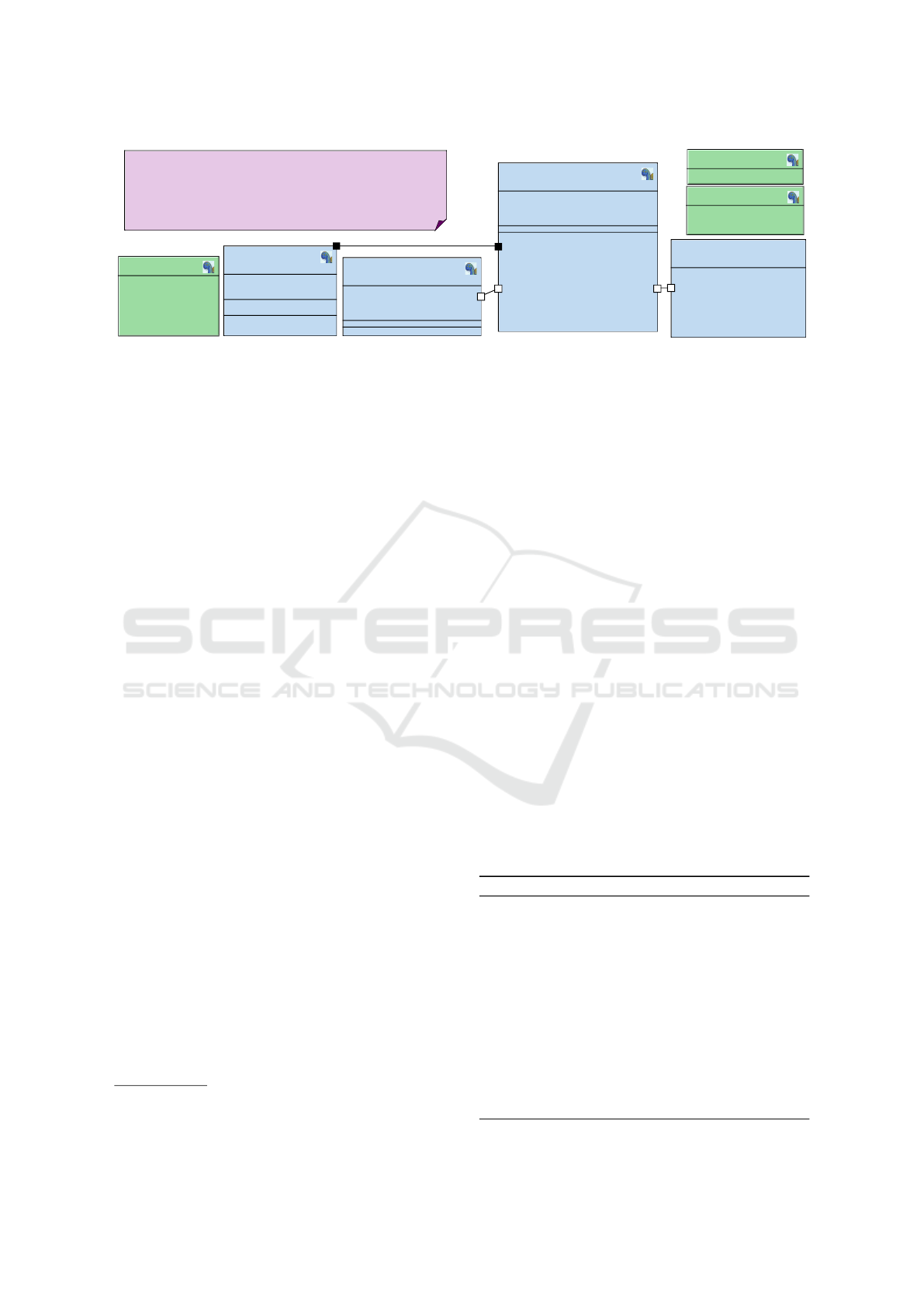
block
EReaderController
- currentDocument : Document;
- currentPage : int;
- page : Page;
~ out displayPage(Page page)
~ in openDocument(Document doc)
~ in flipNextPage()
~ in flipPreviousPage()
~ in goToPage(int index)
~ in home()
~ out loadPage(Document doc, int pageid)
~ in getPage(Page aPage)
block
DisplayDriver
- page : Page;
- data : int;
- printPage(int data)
~ in displayPage(Page page)
block
UserModel
- doc1 : Document;
- doc2 : Document;
- index : int;
block
PageLoader
- doc : Document;
- page : Page;
- pageid : int;
- minPageLoadingTime = 10 : int;
- maxPageLoadingTime = 34 : int;
- x : int;
<<datatype>>
Document
- id : int;
- nbOfPages : int;
<<datatype>>
Page
- data : int;
<<datatype>>
MemoryForPages
- index1 : int;
- data1 : int;
- index2 : int;
- data2 : int;
- index3 : int;
- data3 : int;
Safety Pragmas
T UserModel.FlipPage --> DisplayDriver.NewPage
F A[] PageLoader.x<12
T A[] PageLoader.x<13
T E[] PageLoader.x==12||PageLoader.x==0
T A<> EReaderController.currentPage==0&&DisplayDriver.NewPage
F E<> PageLoader.x == 13
Figure 1: Block diagram with safety CTL properties.
Figure 1 shows a block diagram and the safety CTL
properties to be verified on the model. The state ma-
chine of block eReaderController is shown in Figure
3.
3.2.2 fUML, PSSM and SysML v2
fUML
2
, lastest version 1.4, is an OMG standard
defining a formal semantics for a subset of UML. Un-
fortunately, this subset does not consider state ma-
chines (but rather activities), so we could not rely on
the fUML standard. Also, types such as String or Real
are not handled by our model-checker. Once they
have been released, the Precise Semantics of UML
State Machines standard
3
or SysML v2 may offer new
perspectives to the work described in this paper.
4 MODEL-CHECKER
The main contribution of this paper is the develop-
ment of an open-source model-checker that works al-
most directly on SysML models without a low-level
transformation. Our principal goal is to obtain a flexi-
ble and easily upgradable verification engine that can
be used efficiently to analyze and verify the correct
behavior of a model. Properties are proven with an
on-the-fly method while exploring the state space.
The heart of the model-checker is the construction
of the reachability graph of a model. A reachabil-
ity graph is a directed cyclic graph where each node
represents a possible state of the model. A node de-
pends on the current pointed states, one for each state
machine, the blocks attribute values, and the time
progress. Each edge (a,b) represents a direct reacha-
bility connection from node a to node b. Any subtree
starting from a node a shows the states which are di-
rectly reachable from a. Moreover, analyzing one or
2
https://www.omg/org/spec/fUML
3
https://www.omg.org/spec/PSSM
multiple paths that may connect two nodes, it is pos-
sible to find the sequence of actions that, if executed,
connect the two. The graph is created by combining
the state machines belonging to different blocks in the
SysML model. In this paper we refer to a reachabil-
ity graph node also using the term “r-state”. In this
context, it has to be interpreted as a state of the reach-
ability graph and not a local state of a state machine.
The reachability graph is constructed using a for-
ward traversal BFS (Breadth-First Search) or DFS
(Depth-First Search) strategy. Algorithm 1 shows a
simplified pseudo-code of the main loop. The algo-
rithm starts from the given initial states (one for each
state machine) creating a r-state S
0
. A map STATES
keeps track of the visited r-states. PENDING works
as a queue (breadth priority) or a stack (depth prior-
ity). Then, every cycle, it extracts a r-state S from the
pending queue and it looks for all the available tran-
sitions which are currently executable from S. Each
of them is executed and leads to a new r-state. If a
new r-state is equal to another already visited, it is re-
dundant and only a new link connection is created. If,
instead, it is not equal to any other, it is also added to
the pending queue in order to be later explored. This
procedure cannot be directly used for model-checking
but it can be adapted as it will be explained in the next
section.
Algorithm 1: Reachability graph algorithm.
1: S
0
= {s
0
0
,s
1
0
,..., s
N
0
} Initial r-state
2: STATES={S
0
}, PENDING={S
0
}
3: while PENDING6= {} do
4: Extract a state S from the PENDING queue
5: T = set of executable transitions from r-state S
6: for each transition t
i
in T do
7: Execute t
i
obtaining a r-state P
8: if P /∈ STATES then New r-state
9: Add P to STATES
10: Append P to PENDING
11: end if
12: Add a new edge S → P
13: end for
14: end while
MODELSWARD 2021 - 9th International Conference on Model-Driven Engineering and Software Development
218

Each r-state in the reachability graph is uniquely
represented by a tuple called r-state context
(B
1
,B
2
,··· ,B
n
) where each B
i
refers to a particular
block. The behavior of a block is represented by a
state machine. B
i
is the state machine context which
is also a tuple (p,clock
min
,clock
max
,a
1
,a
2
,··· ,a
m
)
where:
• p is the current state pointer
• clock
min
is the minimum clock value
• clock
max
is the maximum clock value
• a
j
is the value of j-th attribute of the block
From the context definition, a r-state in the reacha-
bility graph contains a pointer for each state machine
to keep track of the current state in each of them. It
saves also the internal minimum and maximum clocks
which are used to select the executable transitions in
time dependency order. Two r-states are considered
equivalent if their contexts are equal.
Several important information must to be consid-
ered when fetching and executing new transitions.
Checking for acceptable transitions involves check-
ing conditions on attributes (guards), on time (e.g.
after(min, max) clause) and on signals (signal send-
ing/receiving).
State machines in different blocks have communi-
cation channels so that different blocks can exchange
information or synchronize their execution. For sig-
nal communications, our model-checker transforms
asynchronous channels into synchronous ones adding
channel queues as a bridge between connected blocks.
Transitions with signal communications are executed
only when at least a sender and a receiver are active
on the same channel. A channel queue acts as either a
sender or a receiver depending on the type of request.
Transitions between states can have conditions
and actions. Our model-checker solves guards (i.e.
boolean conditions on attributes) to activate a transi-
tion and actions to modify attributes values. This is
achieved by temporarily saving the attributes value of
each block in the context of a r-state.
SysML models are usually also timed state ma-
chines. In fact, transitions may have a time dura-
tion and a defined uncertainty (i.e. after(min, max)).
Thus, each transition is associated with a time in-
terval (t
min
,t
max
) where t
min
is the shortest execution
time and t
max
is the longest one. The execution may
happen any time inside that interval
4
. The model-
checker must keep track of the time to select exe-
cutable transitions. Block clocks are used for this
4
A transition may occur also after max clock value has
elapsed in case the action of the transition is not possible,
e.g. waiting for a signal that is not yet available.
purpose. Time is not saved in absolute value, as it
would be quite inefficient, but in relative value with
respect to the block time progress. Moreover, sav-
ing time in absolute value would not allow to detect
easily when some states, at different time periods are
actually equivalent. By saving the clock in a rela-
tive value, equivalent states encountered at a different
time period have the same clock values. Transitions
in different blocks must be converted into the same
timeline. This is achieved by subtracting the block
clock interval from the transitions in the respective
block. The executable transitions are extracted do-
ing the intersection with the first smallest time domain
(min
∀t∈T
t
c
min
,min
∀t∈T
t
c
max
). For instance, if we are
at clock (0, 0) and we have three available transitions
a : (0,3), b : (1,2), c : (3,5), the first smallest time
domain would be (0,2). Thus, the two possible tran-
sitions that can be executed are a with the new inter-
val (0, 2) and b : (1,2). Transition c could never be
executed since it lies outside the maximum execution
time limit of other transitions. The same thing hap-
pens for a at time 3.
Finally, the following operations are applied to
transitions in order to extract the executable ones:
• for a transition acting on a channel, check for an
active sender or receiver
• solve transitions guards
• update transitions clock w.r.t. the local clock
• select the executable transitions in the first small-
est clock interval (i.e. the time domain).
The execution of a transition creates a new r-state
with an updated context. In the block of the just exe-
cuted transition, the state pointer is updated with the
new one and the internal clock is reset. For the other
blocks, the internal clock is incremented by the tran-
sition interval (clock
min
+t
c
min
,clock
max
+t
0
c
max
)
5
.
The reachability problem is covered on-the-fly
with the construction of the reachability graph. In
fact, all the reachable states and properties are en-
countered during its creation. If at the graph creation,
or at a given depth bound, a state is not traversed, or a
property is not satisfied, their reachability is false.
5 PROPERTIES
The reachability check, presented at the end of the
previous section, allows only a basic verification of
a model. Several other checks like liveness, safety
properties, deadlocks, livelocks, etc. are necessary to
5
t
0
c
max
considers the maximum time limited at
min
∀t∈T
t
c
max
Direct Model-checking of SysML Models
219

have a clear idea if the behavior of the SysML model
is as expected. The reachability algorithm shown in
the previous section can be used as a basis for generic
formal verification on SysML models. Our model-
checker framework can also prove CTL formulae and
the general checks as: liveness and safety properties,
reachability, and deadlock freedom.
Most of these properties are way more challeng-
ing to prove than reachability. Usually, the standard
approach consists in detecting execution cycles that
present specific conditions. Loops are usually found
using the strong connected components (SCC) algo-
rithm. In our case, loops can be found while con-
structing the reachability graph. Every time a new
r-state P in the reachability graph is equivalent to
another S that has been already found, a depth first
search from S to f ather(P)
6
is used to find if a path
that connects them exists. If it exists, a cycle is de-
tected. This is true by construction of the reachabil-
ity graph since state P is equivalent to S and reach-
able from it. Some properties may require the model-
checker to execute to completion or until a deadlock
is detected.
Deadlocks can be easily detected while building
the reachability graph. Every time a reachable r-state
has not enabled transitions, that r-state is a deadlock.
The supported CTL formulae are defined accord-
ingly to the UPPAAL standard syntax:
• A[] p: property p is always true for all r-states of
each path (other notation AG p)
• A<> p: for all the paths, property p will eventu-
ally be true for some r-states (other common no-
tation AF p)
• E[] p: there exists at least one path for which
property p is always true for each r-state in that
path (other common notation EG p)
• E<> p: there exists a path in which property p
will eventually be true for some r-states of that
path (other common notation EF p)
• p → q: for all the paths and r-states on that
paths, if p becomes true then for all the paths and
some r-states on these paths, q will eventually be-
come true (other common notation AG(p ⇒ AFq)
called leadsTo)
with p and q boolean properties. A property can test
states of state machines, variables or a mix of them
using standard arithmetic and boolean operators.
Figure 2 shows how CTL formulae are expressed
in TTool and their result after the verification has run.
Before a property, an expected value (T for True, or F
6
f ather(P) is the father from which P has just been dis-
covered
for false) may be expressed in order to show the veri-
fication result accordingly. The model corresponds to
the one shown in Figure 1. A green tick is displayed
when the property is satisfied, while a red cross is dis-
played in the opposite case. If the answer is unknown,
in case of a timeout in the execution or if the verifi-
cation is terminated by the user, a question mark is
displayed.
Safety Pragmas
T UserModel.FlipPage --> DisplayDriver.NewPage
F A[] PageLoader.x<12
T A[] PageLoader.x<13
T E[] PageLoader.x==12||PageLoader.x==0
T A<> EReaderController.currentPage==0&&DisplayDriver.NewPage
F E<> PageLoader.x == 13
Figure 2: CTL properties after verification.
Figure 3 shows how reachability and liveness prop-
erties are backtracked and displayed in the state ma-
chines for each state element, using green or red ”R”
and ”L” attached to states.
Here we show some examples of possible CTL
properties on SysML models and their meaning:
• A<> Controller.Received: tests if the Controller
block on all the paths will eventually reach a ”Re-
ceived” state, e.g. once an information from a sen-
sor has been received.
• A[] SpeedSensor.sampledSpeed <= SpeedCon-
troller.speedLimit + SpeedController.tolerance:
checks that the measured speed of a vehicle never
exceeds the defined limit
• WatchDog.Timer == 0 → System.Restart: checks
that every time a watchdog timer reaches zero, the
system goes to the Restart state
Given a test on property p, we define a true (false)
loop as a loop with condition on property p satisfied
(unsatisfied). In the same manner, we define also a
true (false) deadlock as a deadlock where the con-
dition on property p is satisfied (unsatisfied). These
properties are now described in the model-checking
context that has been presented using a combination
of reachability and cycles detection:
• A[] p: if during the reachability graph creation a
new r-state has p false, then the property is false
(reachability of ¬p)
• A<> p: if p is true for a r-state, stop the search
on that path as it is already valid. If a false loop or
a false deadlock are found, the property is false.
If no false loops or false deadlocks are found, the
property is true.
• E[] p: if p is false for a r-state, stop the search on
that path as it is invalid. If a true loop or a true
deadlock are encountered, the property is true. If
MODELSWARD 2021 - 9th International Conference on Model-Driven Engineering and Software Development
220
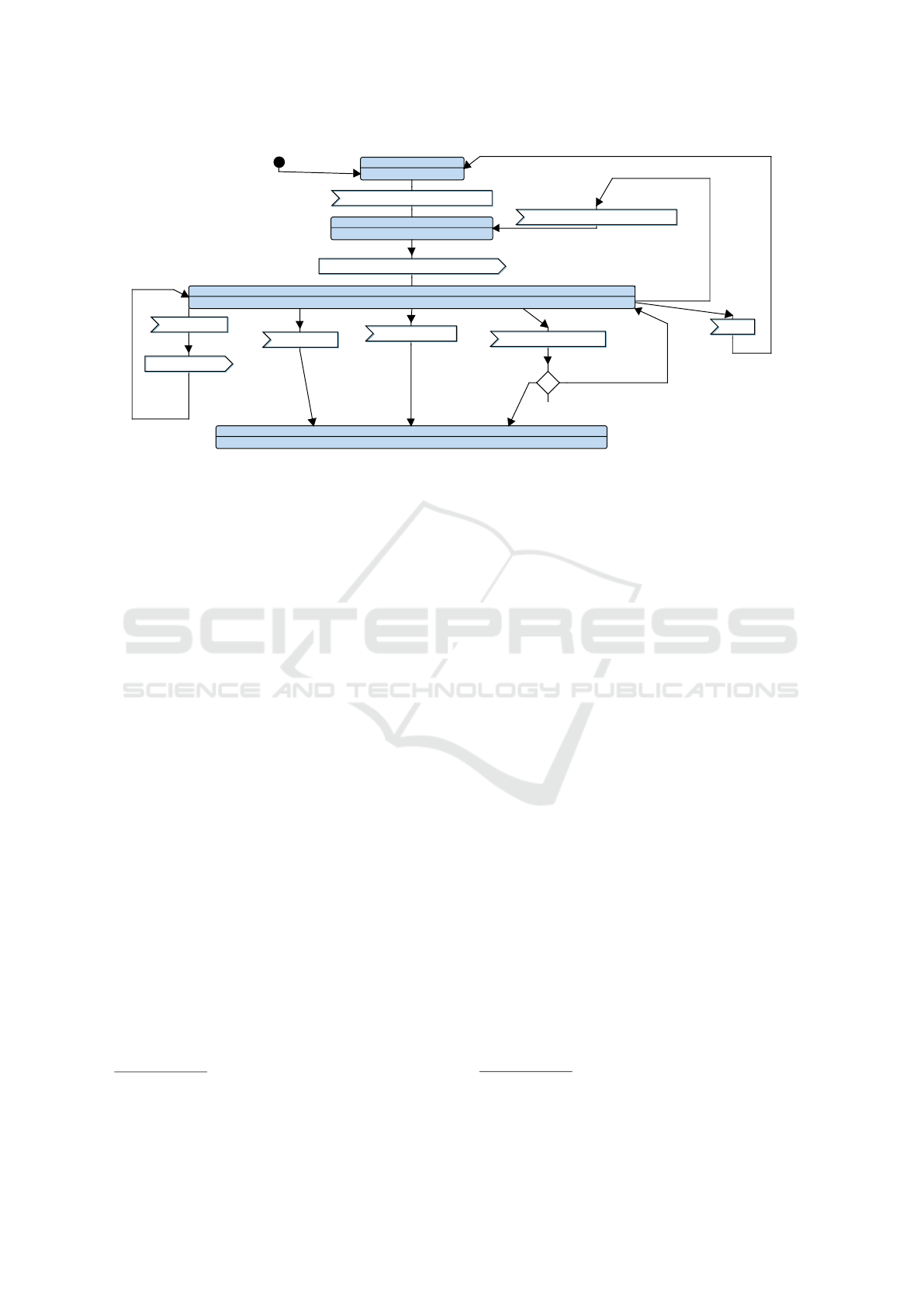
WaitingForDocument
R
R
L
L
openDocument(currentDocument)
R
R
L
L
home()
R
R
L
L
openDocument(currentDocument)
R
R
L
L
PageLoadingManagement
R
R
L
L
loadPage(currentDocument, currentPage)
WaitingForPageBeingLoadedOrUserEvent
R
R
L
L
flipPreviousPage()
R
R
L
L
goToPage(currentPage)
R
R
L
L
PageLoadingManagement
flipNextPage()
R
R
L
L
getPage(page)
R
R
L
L
displayPage(page)
currentPage = currentDocument.currentPage
[currentPage < currentDocument.nbOfPages ]
currentDocument.currentPage = currentDocument.currentPage + 1
[ not(currentPage == 0) ]
currentDocument.currentPage = currentDocument.currentPage + 1
[(currentPage > 0) and (currentPage < currentDocument.nbOfPages) ]
currentDocument.currentPage = currentPage
[ else ]
Figure 3: State machine with reachability and liveness information for each state element.
no true loops or false deadlocks are found, the
property is false.
• E<> p: if during the reachability graph creation,
p is true in a new r-state, then the property is true.
• p → q: every time p is reached, save the r-state
context. Then, for each saved r-state, start a live-
ness check A<> q with that r-state as a starting
state
7
. If the liveness of q is true for all the saved
r-states or p is always false, the property is true,
else it is false.
Thanks to the integration of a cycle detection algo-
rithm and an expression solver to test the proper-
ties while building the reachability graph, our model-
checker can effectively prove the correctness of a
model allowing a breadth set of tests that are gener-
ally used in this field.
When proving properties, it is a good practice to
provide a report trace which is reported as a list of
r-states and actions, extracted as a sub-path from the
reachability graph. Our model-checker can generate
such a trace, but techniques to do so are not explained
in this paper.
6 IMPLEMENTATION AND
EVALUATION
The main issue model-checking faces is probably the
combinatorial explosion. Optimizing the computation
power and memory size necessary for a given SysML
7
This process of saving the context when a first property
is satisfied and iterate to the next ones, is valid and can be
adopted for generic nested properties.
model is therefore of prime importance. In this sec-
tion we present some of the techniques that we have
used to limit the exploration space and to enhance per-
formance.
6.1 State and Transition Merging
Since even reasonably small models may have a huge
number of r-states, it is important to adopt state merg-
ing techniques both as a pre-computation process and
on-the-fly. The first step is to merge states which
are linked by empty transitions
8
. A second step, on-
the-fly, merges non-empty transitions with no mul-
tiple choice and time dependencies. Each transition
is associated with an unique ID. The merge is exe-
cuted in ascending order by ID. This operation sup-
ports a notable reduction in the number of r-states
without changing the verification result. There is an
exception. This optimization approximates the con-
currency since it merges by ID some possible con-
current r-states. On nested properties, like the lead-
sTo, the result may change since a second pass it-
eration could check for a concurrency on a merged
r-state. The merging order cannot be reconstructed
backwards since old transitions are not saved (to save
memory). However, the verification does not nor-
mally depend on these cases since the nested prop-
erties are usually not concurrency related. In fact, the
idea behind nested properties is to check something in
the future. Anyway, with an option this optimization
can be disabled. On the leadsTo property, a further
optimization is also active. When a r-state at the first
8
With empty transitions we refer to state machine transi-
tions with no actions, no time dependency, no multiple valid
choices transitions.
Direct Model-checking of SysML Models
221

iteration has a true property, available non-concurrent
transitions are continuously merged if they keep the
property satisfied. In this way, the number of nodes
for the second pass iteration is notably reduced.
6.2 Impact of the Exploration Approach
The reachability graph algorithm could be used in a
multi-thread BFS or DFS mode. For some proper-
ties, such as liveness, we noticed that a DFS explo-
ration is generally more effective than a BFS one as
the main proof of unsatisfiability is given by loops or
deadlocks. A search in depth increases the odds to
find quickly those features.
6.3 State Encoding
The context of a r-state is necessary to save the ba-
sic local information. It is also needed to fetch the
transitions starting from the current state in order to
search for new reachable nodes. The context defines
uniquely a r-state and it is used to generate an hash
value. All the r-states are inserted in an hash table us-
ing the context hash as a key. To find if a new r-state
has already been discovered, its context hash is gen-
erated. Then, the hash table is accessed checking if
it contains the generated hash. To save memory, once
a node generates all its subsequent next reachable r-
states, its context can be freed.
The r-state context saves also the values for each
attribute of each block in the model. It is necessary
so that, when a guard is evaluated, the attribute cur-
rent value is read directly from the context. Those
values are usually updated by the model during its ex-
ecution using signals or assignment actions. If this
update never occurs, the attribute is a constant. In pre-
computation, constants are removed from the context
and they are directly substituted as immediate val-
ues into the expressions they are involved. Moreover,
boolean attributes are grouped and represented on 1-
bit while integers can be represented on 8, 16 or 32
bits.
6.4 Handling of Properties
Expressions and properties are constructed as a syntax
tree. Each node is an operator while each leaf is an at-
tribute or an immediate value. By vising the tree from
the root, the result of the expression can be easily and
efficiently retrieved. Leaves have a direct pointer to
their corresponding location in the r-state context to
have fast access to their values. Leaves containing at-
tributes are saved in a hash table so that leaves can be
shared among different expressions or properties.
6.5 Overall Performance
Before developing this framework, TTool relied on
UPPAAL to verify its models. Thus, the perfor-
mance of the new internal model-checker is evalu-
ated by comparing the two. Table 1 shows some
results comparing our model-checker to UPPAAL.
Time values for UPPAAL don’t include the transla-
tion time of a model which takes around 225 ms. The
properties are tested on various SysML models, most
of them available in the public TTool repository
9
.
The ebook, telecom final, and CoffeeMachine async
(CM async) models contain asynchronous channels
while AirbusDoor V2 (AD V2), UAV, and Pressure-
Controller (PC) contain only synchronous channels.
R, L, and D refer in order to reachability, liveness, and
deadlock freedom.
Our model-checker allows to build a reachability
graph (1386541 r-states in ebook model) that can be
opened for a visual representation that captures the
global model behavior. Moreover, the reachability
graph can be minimized to represent only the states
chosen by the user. This feature is not available in
UPPAAL.
Generally, our model-checker is faster than UP-
PAAL over synchronous channels and for short time
verification over asynchronous channels. UPPAAL
performs generally better in expensive and hard ver-
ification, like the leadsTo property, and over asyn-
chronous channels. As a future work, we plan to im-
prove the performance using additional optimization
techniques, especially on asynchronous communica-
tions, and moving our implementation from Java to
C++ since memory management is one of the main
bottlenecks. There is still margin for improvement.
Nevertheless, our implementation obtains good re-
sults while being able to link the verification to the
model representations, traces and simulation.
7 CONCLUSION
The paper introduces a model-checker directly work-
ing from SysML model, thus without a prior trans-
formation to a formal specification. Our model-
checker can handle CTL-like properties. Our eval-
uation shows that it compares to a state-of-the-art
model-checker.
This model-checker is already available in TTool.
All properties described in this paper can be directly
captured in the AVATAR block diagrams. Once the
9
Some models have been modified to increase the com-
binatorial space of the verification.
MODELSWARD 2021 - 9th International Conference on Model-Driven Engineering and Software Development
222

Table 1: Model-checker timing results (low values are bet-
ter).
Model Property Time MC (ms) Time UPPAAL (ms)
ebook RG 3832 /
ebook D 14 755
ebook LeadsTo 5659 2235
ebook A[]x<12 (BFS) 10 287
ebook A[]x<13 (BFS) 3478 1303
ebook E[] (BFS) 14 282
ebook A<>(DFS) 29 279
ebook E<>(BFS) 3604 1292
ebook R, L, D, CTL 17529 12068
telecom final R, L 1242 2927
AD V2 R, L, D 82 433
CM async R, L, D 126 393
CM async CTL 2776 1328
UAV R, L, D, CTL 688 2505
PC R, L, D, CTL 198 748
model-checker has verified them, a green check or a
red cross indicates for each property whether they are
satisfied or not. Additionally, a counter example can
be generated in some situations. We now intend to im-
prove this trace generation facility. We also intend to
extend this model-checker to other profiles supported
by TTool. Furthermore, we plan to tackle new opti-
mization techniques to make our model-checker even
more competitive among the available ones. Linking
this model-checker to other UML/SysML framework
is also part of our future work.
ACKNOWLEDGEMENTS
The AQUAS project is funded by ECSEL JU under
grant agreement No 737475.
REFERENCES
Ando, T., Yatsu, H., Kong, W., Hisazumi, K., and Fukuda,
A. (2013). Formalization and model checking of
sysml state machine diagrams by csp#. In Murgante,
B., Misra, S., Carlini, M., Torre, C. M., Nguyen,
H.-Q., Taniar, D., Apduhan, B. O., and Gervasi, O.,
editors, Computational Science and Its Applications
– ICCSA 2013, pages 114–127, Berlin, Heidelberg.
Springer Berlin Heidelberg.
Apvrille, L., Courtiat, J. ., Lohr, C., and de Saqui-Sannes,
P. (2004). Turtle: a real-time uml profile supported
by a formal validation toolkit. IEEE Transactions on
Software Engineering, 30(7):473–487.
Apvrille, L., de Saqui-Sannes, P., and Vingerhoeds, R.
(2020). An educational case study of using sysml
and ttool for unmanned aerial vehicles design. IEEE
Journal on Miniaturization for Air and Space Systems,
1(2):117–129.
Apvrille, L. and Li, L. W. (2019). Harmonizing safety,
security and performance requirements in embedded
systems. In Design, Automation and Test in Europe
(DATE’2019), Florence, Italy.
Apvrille, L., Muhammad, W., Ameur-Boulifa, R., Coud-
ert, S., and Pacalet, R. (2006). A uml-based environ-
ment for system design space exploration. In 2006
13th IEEE International Conference on Electronics,
Circuits and Systems, pages 1272–1275.
Bruel, C. (1998). Integrating formal and informal spec-
ification techniques. why? how? In Industrial-
Strength Formal Specification Techniques, Workshop
on, page 50, Los Alamitos, CA, USA. IEEE Computer
Society.
DeAntoni, J. and Mallet, F. (2012). Timesquare: Treat your
models with logical time. In International Conference
on Modelling Techniques and Tools for Computer Per-
formance Evaluation, pages 34–41. Springer.
Delatour, J. and Paludetto, M. (1998). Uml/pno: A way
to merge uml and petri net objects for the analysis
of real-time systems. In Demeyer, S. and Bosch,
J., editors, Object-Oriented Technology: ECOOP’98
Workshop Reader, pages 511–514, Berlin, Heidel-
berg. Springer Berlin Heidelberg.
Gabmeyer, Sebastian, K. P. S. M. G. M. K. G. (2019).
A feature-based classification of formal verification
techniques for software models. Software & Systems
Modeling.
Kangas, T., Kukkala, P., Orsila, H., Salminen, E.,
H
¨
annik
¨
ainen, M., H
¨
am
¨
al
¨
ainen, T. D., Riihim
¨
aki, J.,
and Kuusilinna, K. (2006). Uml-based multiprocessor
soc design framework. ACM Transactions on Embed-
ded Computing Systems (TECS), 5(2):281–320.
Laleau, R. and Mammar, A. (2000). An overview of a
method and its support tool for generating b speci-
fications from uml notations. In Proceedings ASE
2000. Fifteenth IEEE International Conference on Au-
tomated Software Engineering, pages 269–272.
Ouchani, S., Ait Mohamed, O., and Debbabi, M. (2013). A
probabilistic verification framework for sysml activity
diagrams. volume 246, pages 165–170.
Sch
¨
afer, T., Knapp, A., and Merz, S. (2001). Model check-
ing uml state machines and collaborations. Electronic
Notes in Theoretical Computer Science, 55:357–369.
Stemmer, R., Schlender, H., Fakih, M., Gr
¨
uttner, K., and
Nebel, W. (2019). Probabilistic state-based rt-analysis
of sdfgs on mpsocs with shared memory communica-
tion. In 2019 Design, Automation Test in Europe Con-
ference Exhibition (DATE), pages 1715–1720.
Thiele, L., Wandeler, E., and Haid, W. (2007). Performance
analysis of distributed embedded systems. In Interna-
tional Conference On Embedded Software: Proceed-
ings of the 7 th ACM & IEEE international conference
on Embedded software, volume 30, pages 10–10. Cite-
seer.
Viehl, A., Sch
¨
onwald, T., Bringmann, O., and Rosenstiel,
W. (2006). Formal performance analysis and simu-
lation of uml/sysml models for esl design. In Pro-
ceedings of the conference on Design, automation and
test in Europe: Proceedings, pages 242–247. Euro-
pean Design and Automation Association.
Wang, H., Zhong, D., Zhao, T., and Ren, F. (2019). Inte-
grating model checking with sysml in complex system
safety analysis. IEEE Access, 7:16561–16571.
Direct Model-checking of SysML Models
223
