
Independently Moving Object Trajectories
from Sequential Hierarchical Ransac
Mikael Persson
a
and Per-Erik Forss
´
en
b
Department of Electrical Engineering, Link
¨
oping University, Sweden
Keywords:
Robot Navigation, Moving Object Trajectory Estimation, Visual Odometry, SLAM.
Abstract:
Safe robot navigation in a dynamic environment, requires the trajectories of each independently moving object
(IMO). We present the novel and effective system Sequential Hierarchical Ransac Estimation (Shire) designed
for this purpose. The system uses a stereo camera stream to find the objects and trajectories in real time.
Shire detects moving objects using geometric consistency and finds their trajectories using bundle adjustment.
Relying on geometric consistency allows the system to handle objects regardless of semantic class, unlike
approaches based on semantic segmentation. Most Visual Odometry (VO) systems are inherently limited to
single motion by the choice of tracker. This limitation allows for efficient and robust ego-motion estimation in
real time, but preclude tracking the multiple motions sought. Shire instead uses a generic tracker and achieves
accurate VO and IMO estimates using track analysis. This removes the restriction to a single motion while
retaining the real-time performance required for live navigation. We evaluate the system by bounding box
intersection over union and ID persistence on a public dataset, collected from an autonomous test vehicle
driving in real traffic. We also show the velocities of estimated IMOs. We investigate variations of the system
that provide trade offs between accuracy, performance and limitations.
1 INTRODUCTION
Navigation in an environment with uncoordinated, In-
dependently Moving Objects (IMOs) is a challeng-
ing problem. A key component to the biological so-
lution of this problem is stereo vision. Humans ro-
bustly identify moving objects. We do this for ob-
jects in categories never before seen, and use what is
seen over time to predict where objects are moving. It
should therefore be possible to find, estimate and pre-
dict moving objects in a manner useful for navigation
using a stereo camera.
In this work we focus on the real-time detection
and trajectory estimation of moving objects in stereo
video. In the image space this gives us instance
segmentation for rigid independently moving objects
as shown in Figure 1. We seek the trajectories in
6D pose-space over time in order to be able to plan
around them. While a robot would benefit from a
multitude of sensors such as lidar and IMU, we limit
ourselves to a stereo sensor. This reduces the com-
plexity of the system and the number of dependencies.
a
https://orcid.org/0000-0002-5931-9396
b
https://orcid.org/0000-0002-5698-5983
Figure 1: Shire result. World tracks in red, IMOs marked by
bounding boxes along with the tracks that are considered as
belonging to the objects. Their full 6D trajectories in pose
space are estimated in each frame. Shire does not use deep
networks or semantic segmentation.
We further limit ourselves to rigid objects, such as ve-
hicles, as they are of key importance to autonomous
driving. The principle however generalizes to piece-
wise rigid objects and temporarily rigid objects. This
covers many real obstacles, as can be seen in Figure 4.
We present a novel, fast, accurate, and robust so-
lution for real stereo sequences. The solution is based
on a causal greedy probabilistic approach to the as-
signment and cluster count problems. The solution
exploits the sequential nature of the track data and the
722
Persson, M. and Forssén, P.
Independently Moving Object Trajectories from Sequential Hierarchical Ransac.
DOI: 10.5220/0010253407220731
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
722-731
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

typical distribution of moving objects in real scenes.
The proposed system extends the feature tracking
type of visual odometry system (Klein and Murray,
2007; Badino et al., 2013; Mur-Artal and Tard
´
os,
2017; Persson et al., 2015; Cvi
ˇ
si
´
c et al., 2017) to
detect and estimate multiple trajectories. The imple-
mentation is based on CV4X (Persson et al., 2015)
which achieved state of the art results on the KITTI
egomotion benchmark and can thus provide reliable
egomotion. We now extend this system to also es-
timate trajectories of independently moving objects.
The proposed system uses geometric consistency over
time to detect objects. This takes the form of repro-
jection error minimization to assign tracks and esti-
mate object states over time. As the world is also de-
tected as a rigidly moving object, a useful by-product
of the system is the ego-motion trajectory. We call the
system described in Section 3 Sequential Hierarchi-
cal Ransac Estimation (Shire). Shire performs well
in practice, in particular for nearby and fast moving
objects. These objects are exactly those that are im-
portant for dynamic obstacle avoidance. Shire is real-
time (30 Hz) on a standard desktop CPU.
The system is evaluated using a novel dataset,
which we make available (Persson, 2020). Ideally
we would have liked to evaluate our method by com-
paring the trajectories of the estimated IMOs to their
ground truth. To the best of our knowledge no suitable
dataset is available for this, nor can we generate such
ground truth for our dataset. The dataset is collected
from our experimental vehicle, when driving in real
traffic. It covers inner city, country road, and highway.
We evaluate using bounding box instance segmenta-
tion of moving objects. This acts as a proxy for de-
tection, ID persistence, and estimation. This dataset
has been preprocessed and we provide rectified im-
ages, estimated disparity and semantic segmentation
as well as manually annotated IMOs. At the dataset
link, you can also find evaluation software, the Shire
code, and an example video.
2 RELATED WORK
IMO detection and trajectory estimation could be ap-
proached by scene-flow methods. Scene-flow is the
observed 3D motion per pixel. These methods im-
plicitly segment the flow into rigid objects. Scene-
flow approaches can be categorized as classic or deep
learning based methods.
Classic methods are well represented by Piece-
wise Rigid Scene Flow (Vogel and Roth, 2015). The
method uses classic flow, classic stereo and (clas-
sic) superpixel-segmentation. These are used to form
a regularized sceneflow cost function. This cost is
then optimized over a single stereo image pair using
Gauss-Newton (GN). The recent Deep Rigid Scene-
flow (Ma et al., 2019) method is similar in many ways.
The method uses a flow network, a stereo network,
and a semantic-segmentation network. The networks
are used to form a similar cost function. The cost
is then optimized over a single stereo image pair us-
ing GN, unrolled for differentiability. Replacing each
component with its deep learning based variants re-
quires supervised training. This implies the need for
large datasets with both semantic and 3D correspon-
dences ground truth. The cost of such is the main dis-
advantage of the modern method. However, compar-
ison on the KITTI sceneflow benchmark shows that
the latter method significantly outperforms the for-
mer. However, while the deep learning approach is
faster at 746ms compared to 3 minutes on 0.5Mpixel
images, both methods are far from real time. Both
methods could hypothetically be extended to use mul-
tiple images. However, it is unclear how to do so with-
out further increasing the computational cost. The
methods are potentially useful as input to the pro-
posed system. We conclude that they are currently
to slow for our target application.
Another deep learning approach which targets a
similar problem is MOTSFusion (Luiten et al., 2019).
This method aims to identify and separate cars, both
still and moving. The method uses deep optical
flow, bounding box detections, semantic segmenta-
tion, deep stereo. The method also performs ego-
motion compensation using ORBSLAM. Next they
use they use a per track geometrically aware boot-
strap tracking method method in order to associate
tracks over time. This results in strong id propagation
performance for the object detections. The method
also achieves good results on the MOTS benchmark.
The purpose here is tracking rather than 6D trajec-
tory estimation however, though the method could be
extended or used as input. Similar to the deep rigid
sceneflow the issues are with general moving objects
and computational cost. MOTSFusion operating at
0.5MPixel takes 440ms per frame, and while this may
be applicable in some cases, it is a long time in colli-
sion avoidance.
The good performance of the deep learning ap-
proaches comes at a price. Relying on bounding box
and/or segmentation limits the systems to the classes
for which data is available. For new cameras or scene
content, the deep learning methods require finetuning,
which requires ground truth. Even if only to adapt to
the minor differences in resolution, scene and image
characteristics, this requires ground truth data we do
not have. By contrast, the classic methods typically
Independently Moving Object Trajectories from Sequential Hierarchical Ransac
723

only require manual tuning of a few parameters.
A different approach to the problem of IMO state
estimation is found in the 6DVision system (Rabe,
2012). The system fuses stereo and KLT tracks over
time using a set of Extended Kalman filters over 3D
position (with a constant velocity state). The each fil-
ter set is initialized using nearby features states. The
filters of each filterset have varying state priors, mea-
surement noise and process noise. The main advan-
tages of this method are low computational cost. The
main downside is that individual tracks are noisy and
that the filter sets take a long time to converge. In
practice, the state estimates are strongly smoothed.
This leads to decent results for long tracks, but the
system often fails to account for rapid changes.
In this work we introduce a new driving dataset
for the purposes of evaluating the system. Compared
to KITTI our dataset has higher resolution (2Mpixel
vs 0.5Mpixel) and higher framerate (30fps vs 10fps).
Using our own dataset allows us to ensure highly ac-
curate calibration which is required for our method.
We cannot evaluate on the sceneflow benchmarks
such as KITTI as it requires dense sceneflow, which
our method does not provide. Nor can we meaning-
fully submit to the KITTI (Geiger et al., 2012) MOTS
benchmark. This is because the MOTS benchmark
does not distinguish moving objects from stationary
ones. In practice the latter overwhelmingly outnum-
ber the former. We have however run our system on
the these datasets. See section 4.3 for results and fur-
ther discussion.
Real time stereo VO systems lie on a scale from
direct to feature based. Direct systems estimate ge-
ometry directly from pixel intensities and pixelwise
depths. Feature based systems use higher level im-
age features such as patches and descriptors. The
association process of direct systems relies heavily
on assumed geometry. This is because pixel inten-
sities are ambiguous, and the geometry constrains the
problem. Relying on predicted geometry in this way
is a form of geometrically supported tracking. The
simplest case of which would be to search for cor-
respondences along a predicted epipolar line. The
DSO systems of (Engel et al., 2018) and the stereo
variant by (Wang et al., 2017) are typical direct VO
systems. A major advantage of single geometry sup-
ported tracking is that it allows the use of line fea-
tures. This improves the VO systems robustness to
inarticulate environments and simplifies the tracking.
The downside is that it fundamentally limits this type
of system. While DSO could hypothetically be re-
cursively applied in a similar manner to our system,
in practice we have found that initializing the DSO
requires a single dominant motion in view which pre-
cludes this.
Shire is an extension and generalization of the
well studied point feature type visual odometry sys-
tem class. The basis for our method is found in
systems such as PTAM (Klein and Murray, 2007),
MFI (Badino et al., 2013), ORBSLAM (Mur-Artal
and Tard
´
os, 2017), Cv4x (Persson et al., 2015) and
SOFT(Cvi
ˇ
si
´
c et al., 2017). These methods emphasize
the use of inlier/outlier identification and windowed
bundle adjustment. They also use measurement virtu-
alization, keyframing, and as well as non-causal pro-
cessing. Finally most point feature based systems use
geometrically supported tracking. Rather than as a
core of the tracker, the focus is often on improved ro-
bustness against structural aliasing. But it is also used
to extend tracks which in turn reduces trajectory drift.
A core assumption of these methods is that they are
limited to a single rigid object in view. In turn this
means that the tracking can and should detectably fail
for everything else. Due to the features used, feature
based systems are inherently robust against the ba-
sic aperture problem. This means that the integration
with the tracker is less restrictive. For all VO sys-
tems, geometrically supported tracking is key to good
performance. How limiting this is varies however.
Out of the systems considered, the bootstrap track-
ing by matching of Cv4x, is perhaps the least restric-
tive. Cv4x essentially iterates selecting the best corre-
spondence and finding the pose. This places places no
restrictions on the initial search. Without the hard re-
liance on the single motion assumption, it is suited for
our purpose. We strip down these systems into a sim-
ple core suited for fast causal local mapping and gen-
eralize this core system to support IMOs. We also in-
vestigate how to apply geometrically supported track-
ing to Shire with Shire-retrack.
3 METHOD
3.1 Visual Odometry Overview
Our system is an extension of the feature tracking
type of visual odometry system (Klein and Murray,
2007; Badino et al., 2013; Mur-Artal and Tard
´
os,
2017; Persson et al., 2015; Cvi
ˇ
si
´
c et al., 2017). Tracks
are key to such systems and can be defined as the
sequence of image coordinates of a repeatably lo-
calizable feature (landmark). An example would be
the projections of a 3D point with distinct appear-
ance. Landmark tracking visual odometry systems
exploit that the tracks lie on a single static rigid ob-
ject (world). This facilitates identifying outliers and
reducing tracking errors.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
724

First landmarks are detected and then tracked in
latter frames. A cost corresponding to Eqn 1 is then
minimized. This computes the egomotion trajectory
P
t
∀t and local 3d point cloud x
i
∀i.
min
P
t
,x
i
∑
t,i
ρ(y
t,i
−℘
θ
(P
t
x
i
)) (1)
where ρ is a robust error function, y
t,i
is the obser-
vation of landmarks x
i
, at time t and P
t
is the cam-
era pose, i.e. the rigid transform, at time t for t ∈
{t
0
,t
1
, ..., t
N
} and ℘
θ
is the projection operator suited
for x
i
where θ is the intrinsic parameters of the cam-
era.
In the simplest case, x ∈ R
3
, is a 3D point in world
coordinates. The observation noise is Gaussian plus
outliers, the cameras are calibrated, and the corre-
spondences are given.
Typically, ρ, is the L
2
loss combined with an out-
lier rejection scheme based on reprojection error. The
orientation part of the pose is represented as a unit
quaternion. Primarily to avoid the gimbal lock prob-
lem of Euler angles.
The cost Eqn 1 is non-convex, but optimization
will generally converge if the data is balanced and
well initialized. A good way to initialize is by se-
quentially growing the cost i.e. adding one image at a
time. This is further improved by computing PnP to
find the initial pose of each new frame before bundle
adjustment.
3.2 Stereo Point Feature Visual
Odometry
Shire is best understood as an extension to point fea-
ture visual odometry, and for that reason we will first
introduce a base method.
Given a sequence of rectified, calibrated stereo
images, iterating Algorithm 1 provides a basic, but
good, ego-motion trajectory estimate as indicated by
(Persson et al., 2015; Cvi
ˇ
si
´
c et al., 2017; Mur-Artal
and Tard
´
os, 2017).
Specifically we use: the SGM from (Hirschm
¨
uller,
2008) to compute disparity. The KLT implementa-
tion from (Rabe, 2012). The P3P and PnP meth-
ods from (Persson and Nordberg, 2018), and ANMS
from (Gauglitz et al., 2011).
The stereo reprojection error, ε, Eqn 2 for each
track includes disparity d(y) ≥ 0. It also requires the
points to be in front of each observing camera.
ε(y, d, P, x) =(y −℘
Θ
l
(Px))
2
+
λ(d − [℘
Θ
l
(Px) −℘
Θ
r
(P
rl
Px)]
0
)
2
(2)
where Θ
l
, Θ
r
are the camera intrinsics, and P
rl
is the
relative pose of the stereo rig. Subscript 0 denotes
using the horizontal coordinate only.
Algorithm 1: Stereo Point Feature Visual Odometry.
1: Let: Left, right images at time t: LR
t
2: Let: Tracks of object o at time t: tracks
o,t
3: Let: Pose at time t: Pose
t
4: # Compute disparity
5: depth
t
= SGM(LR
t
)
6: # Track features using KLT
7: tracks
t
← tracker(LR
t
,tracks
t−1
), depth
t
(LR
t
)
8: # Compute pose: Ransac P3P and refinement
9: P
t
← robust PnP(tracks
t
)
10: windowed bundle adjustment(P
:
, x
:
)
11: tracks
t
← inliers(tracks
t
: ε(track
t
) < τ
inlier
)
12: # Detect new features
13: tracks
t
∪ ← detector(LR
t
, depth
t
)
14: tracks
t
← ANMS(tracks
t
)
The parameter λ = 0.5 is a balancing weight cor-
recting for the relative variance of the tracker and dis-
parity methods. We found this value by comparing
the relative errors when viewing a static scene. The
method is fairly robust to different values however.
λ ∈ [0.1, 2] provides similar results if the other thresh-
olds are adjusted accordingly.
We minimize the squared L2 norm of the stereo
reprojection error, as it achieved good results and per-
formance:
min
P
t
,x
i
∑
ε(y
t,i
, d
t,i
, P
t
, x
i
))∀t, i (3)
We have found that the quality and robustness of
Algorithm 1 method is bounded by the tracker and
disparity estimates (assuming pixel accurate calibra-
tion and typical scenes).
Algorithm 1 is not limited by geometrically sup-
ported tracking. Therefore we can extend it to support
multiple independently moving objects.
Many different tracking, disparity or optical flow
methods could be used, but this is not the focus of this
work. Instead we use real time implementations of
standard methods. It is common to use keyframing to
facilitate loop closure or reduce computational cost,
but for clarity this is omitted here.
Adaptive Non-Maxima Suppression (ANMS) is
often overlooked in VO descriptions (Gauglitz et al.,
2011). We explicitly include ANMS as it is key to
good performance both computationally and in terms
of accuracy. ANMS conditions the optimization prob-
lem, as nearby observations will have correlated er-
rors. The importance of ANMS also indicates that
there is a limit to the accuracy gain possible by in-
creasing the track density. In other words, observa-
tions must cover a minimum amount of image for
accurate pose estimation, regardless of track density.
This applies to both Shire and Algorithm 1. Typical
ANMS parameters are radius = 1% image width, 100
Independently Moving Object Trajectories from Sequential Hierarchical Ransac
725
minimum tracks, and a strength score which is (track
age, cornerness score).
We use the high performance sparsity aware Ceres
Solver (Agarwal et al., 2020) to optimize the cost.
3.3 Extension to IMOs
We view reprojection error based inlier/outlier clas-
sification as a world/not world assignment operator.
Thus we extend this notion to the simultaneous as-
signment and optimization of multiple rigid objects.
A simple idea, which never the less results in a chal-
lenging optimization problem:
min
P
c,t
,x
i
,c
is
∑
t,i∈c
is
ρ(y
t,i
, d, P
c,t
, x
c,i
) +C(c
is
) (4)
Here ρ is a robust and weighted stereo reprojection
error, similar to Eqn 2. The pose P
c,t
is that of the
camera in IMO c:s coordinate system at time t and x
c,i
is the 3D point coordinates in IMO c:s coordinates.
The set of features belonging to object c is c
is
. Finally
the clustering penalty C(c
is
) accounts knowledge of
the distribution of objects. Without which a global
minimum is trivially found by putting every point in
its own object.
From an abstract perspective the problem is one of
association, clustering and minimization. The cluster-
ing space is non-metric due to the use of reprojection
errors as distance to cluster. This violates the assump-
tions of many greedy solver such as KMeans. Further
complicating things, the number of clusters and their
distribution is unknown. In short the problem is chal-
lenging.
Restricting ourselves to rigid objects, there is no
fundamental difference between the estimation of the
IMO trajectory with respect to the static world, and
the estimation of the IMO trajectory with respect to
the moving rigid object. Thus if the cluster associa-
tion of each track is known, the stereo VO method of
subsection 3.2 can be applied to each IMO indepen-
dently.
Similar to the static world inlier/outlier case we
can assign tracks to IMOs using a noise model,
and when there is sufficient evidence, initialize new
IMOs. The key observation on which the system is
built, is that while tracker errors leave many track as-
signments ambiguous, an often sufficient subset can
be unambiguously assigned in each frame. Thus by
accumulating information over time we causally de-
tect, assign and estimate in real time. In essence we
have three possible states for a track, inlier, ambigu-
ous, and outlier.
3.4 Shire
Given a sequence of rectified, calibrated stereo im-
ages, Shire iterates the steps in Algorithm 2. This
algorithm segments the scene into rigid IMOs and es-
timates their full 6D pose trajectories. The variable
objects consists of both the object pose trajectory and
the 3D coordinates of landmarks associated with the
object.
Algorithm 2: Shire.
1: Let: Objects at time t: ob jects
t
2: Let: Tracks of object o at time t: tracks
o,t
3: Let: Reprojection error of track tr for object given
optimized track state: ε
o,tr
4: score(o,tr) = max
t
(ε
o,t
(tr))
5: inlier(o, tr) = score(o,tr) < τ
inlier
6: f ound(o) = #tracks
o,t
> IMO
minimum tracks
7: Track, depth, detect (as per 3.2)
8: Unassigned: us
t
← us
t−1
∪ new tracks
9: for each o ∈ ob jects
t−1
do
10: poses
o,t
← PnP(ob jects
0:t−1
, tracks
o,t
)
11: tracks
o,t
← tracks
o,t−1
ininlier(o, tracks
o,t−1
)
12: us
t
← tracks
o,t−1
not in inlier(o, tracks
o,t−1
)
13: ob jects
t
∪ ← f ound(o)
14: windowed bundle adjustment(o)
15: os = not inlier(o,tracks
o,t
)
16: if o 6= world then
17: Split Tracks: us
t
∪ ← lasttwo(os)
18: end if
19: end for
20: Let: cs ← Potential IMO candidates
21: for each tr ∈ us
t
do
22: rs ← sort(score(o,tr)∀o ∈ ob jects
t
)
23: if rs[0] ≥ τ
inlier
then cs
t
∪ ← tr
24: else if rs[1] > τ
outlier
then tracks
o,t
∪ ← tr
25: end if
26: end for
27:
28: Initialize New Object(cs
t
)
29: cs
t
.x ← disparity
t−1
(cs
t
)
30: candidate: c ← PNP(cs
t
)
31: inliers: ins ← cs
t
s.t.rpe
c,cs
t
32: if #inliers > τ
creation count
then
33: Optimize candidate trajectory and points
34: ob jects
o,t
∪ ← candidate
35: end if
Additional details in the source code.
3.4.1 Assignment
The track score for a trajectory is the maximum of
the reprojection errors among the observations given
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
726

the optimal state. The optimal state is the state
which minimizes the squared sum of reprojection er-
rors for that trajectory over the optimization win-
dow. Computing track scores for all trajectories is
comparatively costly. Thus this is only performed
for tracks which are unassigned. The inlier test re-
quires that the reprojection error satisfies the inlier
threshold, and is not ambiguous with respect to the
second best possible assignment. Additionally for
IMOs, it is required that the point is within three
meters of the object center. For an IMO we re-
quire a minimum track count of τ
creation count
= 20.
For the inlier, and outlier thresholds we set τ
inlier
=
2.5 pixels, and τ
outlier
= 4 pixels. The thresholds
were found by looking at error rates of tracks with
known assignment. They coarsely correspond to a
probability of P(observation|from object) = 0.8 and
P(observation|from object) = 0.05.
3.4.2 Detection
The Ransac PNP solver is likely to find IMOs in size
order, beginning with the first object which is con-
sidered the world. Visualization aside it is generally
treated the same as the IMOs with two exceptions:
Outliers which successfully pass the inlier check for
the world, are assigned to it regardless of ambiguity
and regardless of distance to its mass center. This pre-
vents the formation of competing static objects should
an IMO come to a full stop.
Assignment to IMOs is only considered if the
IMO median world coordinate mass center is within
five meters of the points world coordinates in the lat-
est frame.
Initialization of a new object is performed as for
the first two frames in stereo VO, its origin set to iden-
tity at the timestamp of the previous frame. After ini-
tialization, any object for which the tracks do not sat-
isfy the assignment test to itself are unassigned. Ob-
jects with less than ten remaining tracks are discarded,
and its tracks are split and unassigned.
IMOs typically cover a small part of the image
limiting the number of tracks available. This in turn
necessitates denser tracking to meet minimum robust
track count for detection and estimation. To account
for this we use a small ANMS radius 12 pixels Ex-
perimentally we have found that this is a good trade-
off between speed and robustness. Increasing the ra-
dius increases computational speed, but impacts the
detection of smaller objects if increased above 20 pix-
els. Lowering the radius increases computational cost
without an observed associated gain in performance.
The system initializes at most one new object each
frame in order to limit max per frame processing time.
Should performance permit, it is straightforward to
initialize multiple objects by iterating this step.
Ransac PNP with nl-refinement is used because
it is robust against the high outlier ratios that occurs
when searching among candidates formed from a sev-
eral not yet identified IMOs.
3.5 Computational Speed
The tracking and disparity can be performed in ad-
vance in parallel on CUDA, taking taking 30ms for
2Mpixel images.
In order to speed up optimization, bundle adjust-
ment of trajectories is performed over a maximum of
500 tracks. These tracks are found by increasing ra-
dius ANMS. The remainder of the tracks are subse-
quently optimized using fixed poses. To further im-
prove performance, all optimizations and error com-
putations use a window size of five.
The baseline version of Shire operates at 30fps
with two frames of latency between input and trajec-
tory estimates. Shire retrack requires an additional
12ms.
3.6 Semantic Segmentation
While we generally argue in favor of the generic geo-
metric approach, in the specific case of vehicles, fast
semantic segmentation networks are available. There-
fore we investigate how the method can be improved
by semantic labels. In the variant of our method called
Shire-labels we use the FCN (Cordts, 2017; Long
et al., 2015). The segmentation network was trained
on Cityscapes (Cordts et al., 2016).
In Shire-labels, only tracks that lie on vehicles can
be assigned to IMOs. The semantic segmentation was
performed offline in batches, but may be feasible to
run in real time online. The evaluation shows a minor
improvement to intersection over union (IoU) scores.
Qualitatively we see a significant reduction in false
positives.
4 EXPERIMENTS
We investigate four variations of the Shire sys-
tem. Shire is the baseline and the fastest variant.
Shire+labels uses semantic segmentation to limit the
search for candidate tracks. Shire+labels only consid-
ers tracks where the starting pixel is labeled as a car
or truck as IMO candidates. Shire+retrack uses a sec-
ond tracking pass to refine the track associations for
lost tracks. The second tracking pass uses predictions
based on the estimated world and object motions. The
Independently Moving Object Trajectories from Sequential Hierarchical Ransac
727

new track result is kept if consistent with its predic-
tion. This retrack tracking step comes at the cost of
an additional tracking pass. However, unlike the base
tracking pass, this only uses the bottom pyramid level
and is slightly faster. Shire+retrack+labels uses both
labels and the retrack step.
4.1 Dataset and Evaluation
The lack of benchmarks for the identification of mov-
ing objects makes evaluation of IMO estimation a
challenge. Object motion 6D trajectories are gener-
ally difficult to acquire for real sequences. The avail-
able benchmarks are focused on bounding box seg-
mentation of semantic classes. This makes them ill
suited for evaluating the quality of a system which
needs motion, but not semantic class. We propose to
evaluate the system by bounding box IoU and num-
ber of ID switches. Specifically we are interested in
the results on the 2Mpixel stereo dataset we collected
from a Daimler test vehicle. We annotate 7k images
for quantitative evaluation.
We performed manual bounding box instance seg-
mentation for IMOs. The criteria for an object to be
annotated as an IMO were as follows: The object
is a car or truck. The object boundary must move
more than two pixels from frame to frame. This is af-
ter manual egomotion compensation i.e. compared to
known static background. The object must be bigger
than 5% of the image and closer than 70 meters. The
distance was determined using manually verified dis-
parity. Further, the object must be in unoccluded view
for at least five sequential frames. Objects that come
to a complete stop for more than five frames are no
longer considered IMOs. Unoccluded view requires
that 70% or more of the object must be visible. Any
IMO which fully leaves view is considered as having
a new IMO ID. Not all IMOs are annotated.
This IMO selection is conservative in the sense
that the system can detect smaller, shorter lived and
occluded IMOs. The IMO requirements are made
in part because the annotation of such IMOs is of-
ten ambiguous. Their prevalence in the dataset would
also make annotation too costly. This means that false
positives cannot be automatically evaluated. As a re-
sult the primary scores of interest are intersection over
union and false negatives.
Bounding boxes for each proposed object are
computed in each frame as the range of the associated
tracks positions. The proposals are then associated to
the ground truth boxes by IoU order in a one to one
greedy fashion. The greedy assignment is in descend-
ing GT bounding box area order with the added con-
straint of a minimum IoU score of > 0.2. The result
Table 1: Per frame computational cost. Note that this is
only the cost of the Shire algorithm. The first tracking, dis-
parity and semantic segmentation are excluded as these can
be performed in parallel one frame in advance. However,
the second tracking pass required by the retrack method is
included in the timing as this cannot be performed in paral-
lel.
Method median time mean time
shire 27 ms 30 ms
+labels 26 ms 29 ms
+retrack 43 ms 45 ms
+retrack+labels 40 ms 42 ms
Table 2: Number of ID switches, and number of false nega-
tives. Total nr of annotation bounding boxes is 9380. Total
images 7000.
Method switches missed
shire 4 1430
+labels 4 1730
+retrack 3 1505
+retrack+labels 11 902
of which is summarized in Figure 2.
We compute ID switches as the number of times
the IMO ID of the IoU order top choice for a GT IMO
changes. An object must be found at least once to
be included in the computation. If an object is found
lost and found repeatedly again any number of frames
later, each repetition counts as one ID change. The
evaluation software implementation is available.
4.2 Results
Table 1 shows that our method performs in real time
on the i7 3GHz CPU. Table 2 shows that the number
of ID switches is infrequent, but also indicates that
more id switches happen for harder to detect IMOs.
Figure 2 shows excellent performance for the
combined variant. It also shows that the labeled vari-
ant is better at finding object boundraries. Without la-
bel information slightly more IMOs are found at low
IoU scores. Most of these are false positives that hap-
pen to overlap with a gt object. Overall performance
is fairly good for detected IMOs. Unfortunately a sig-
nificant fraction are not detected. IMO shadows play
a role in reducing IoU accuracy as shown in Figure 5.
The experiments show that the purely geometric
Shire achieves moderate success in the generic set-
ting. This result is significantly improved when com-
bined with the segmentation labels, though this is hid-
den by partial overlaps with false positives at lower
IoU scores. This result is further improved by retrack-
ing, though less so in the purely geometric case.
The main differences between the using segmen-
tation and not lies in the effect of shadows and outliers
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
728
0 0.2 0.4 0.6 0.8 1
Threshold
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Best iou > threshold
Intersection Over Union (IoU) Scores
Shire
Shire-labels
Shire-bootstrap
Shire-bootstrap-labels
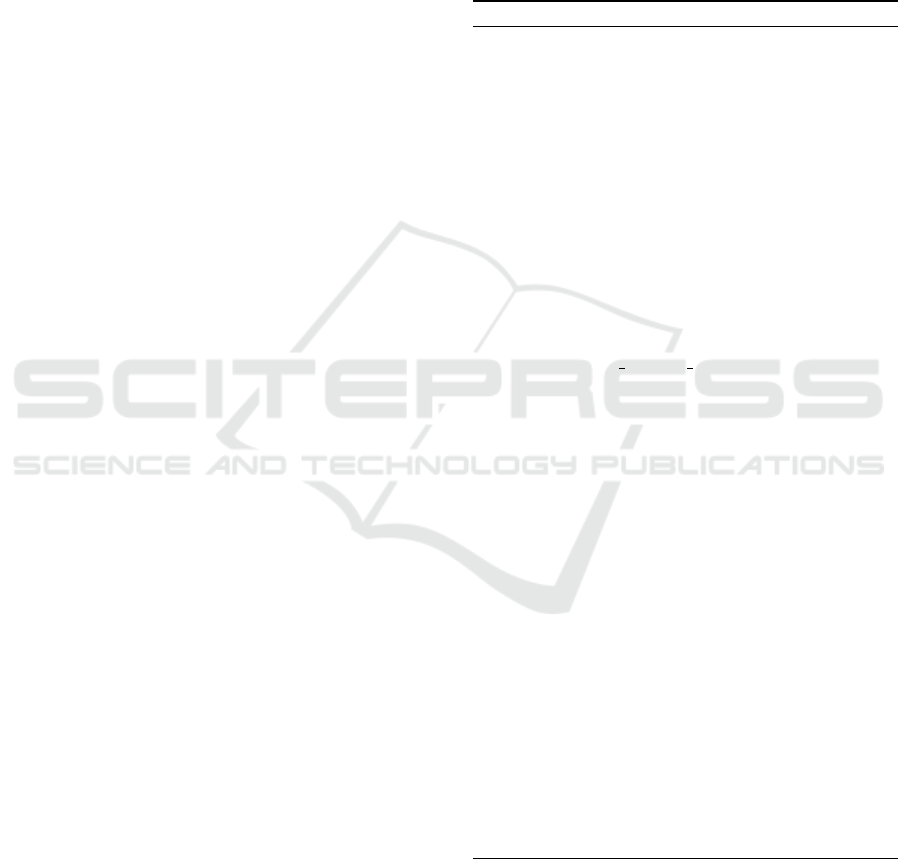
Figure 2: Intersection over Union (IoU) for the best one
to one match for each GT IMO. We see that the using the
label information (Red) provides good results when a high
overlap is required but misses slightly more objects 30%.
Bootstrap (Blue) provides a direct improvement over Shire
(Yellow). Combined they achieve a significant improve-
ment (Purple). Note that not all IMO are detected in every
frame. Roughly 16-30% are not found, most of which lie at
far distances at the beginning or end of a GT IMO.
Figure 3: Shire results. On the left top to bottom. First
frame where cyan car is found. Last frame before it is lost.
First frame where the blue car is found. Last frame be-
fore it is lost. On the right. The two cars mass centers in
world coordinates over time shown as dots and the Vehi-
cle egomotion poses shown as blue/red coordinate systems.
Egomotion is from the bottom left to the upper right, IMOs
are driving in the opposite direction. Best viewed electron-
ically.
on bounding boxes. There is also a small impact on
speed and an increase in the number of false positives.
A simple heuristic was used to reduce the impact
of outliers that fit the geometry. Tracks used for find-
ing the bounding box must be tracked for at least three
frames. This heuristic applies only if the at least half
Figure 4: Shire result. A pedestrian IMO detected by the
system. While violating the rigid object assumption, peo-
ple, and most other non rigid IMOs, are often locally rigid.
At 100x200 pixels the pedestrian is too small to be frac-
tured into several IMOs. Instead it is intermittently lost and
re-detected. The ability to detect generic IMOs is an advan-
tage of the purely geometric method.
Figure 5: Shire results. Red tracks are world, cyan, yellow
and pink are IMOs. The track on the cyan car’s shadow
causes the IMO bounding box to be significantly extended
for the car. This happens because the sun is distant, and
the car moves in the plane the shadow is projected on top.
A downside of the purely geometric method, as we do not
collide with shadows.
the tracks on the object have been tracked for three
frames. We note that better heuristics could be de-
vised. In particular an analysis of the plane of the
motion could be used to identify tracks on shadows.
However this is left as future work.
We observe that the system excels at detecting and
segmenting fast or nearby objects, but struggles with
distant ones. This expected result is never the less
beneficial in terms of which objects are important for
safe navigation.
Like most feature tracking VO systems, the
method is bounded in performance by the tracker. The
tracker struggles if the object tracks lengths near or
exceed the maximum supported distance. This is in
part due to direct search distance limitation and due to
large appearance changes due to perspective. The fea-
ture detector also struggles with low contrast or blurry
images, such as caused by dark regions in otherwise
sunny scenes and rain.
The system provides decent ID propagation for
IMOs. The primary error source being when two
Independently Moving Object Trajectories from Sequential Hierarchical Ransac
729
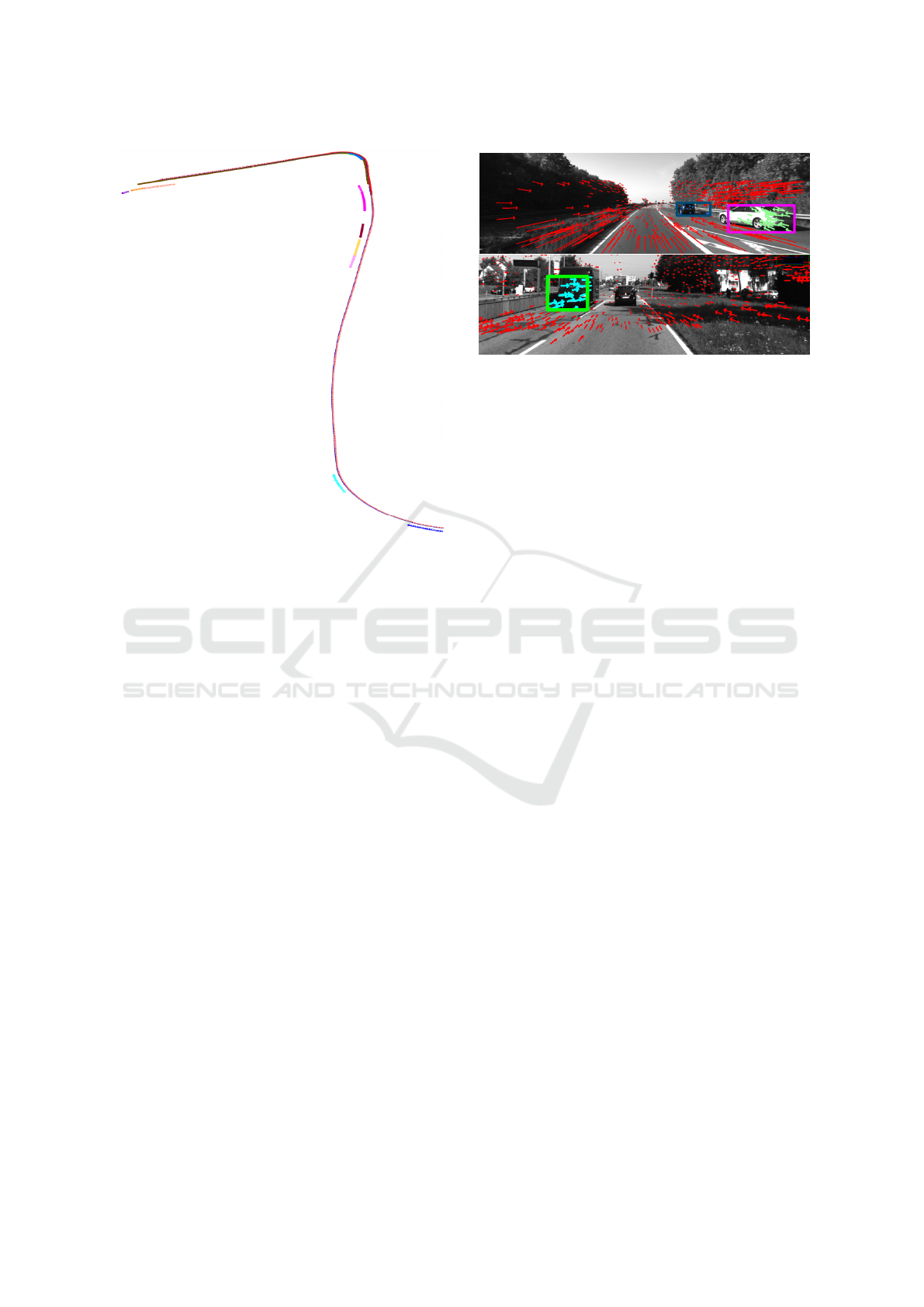
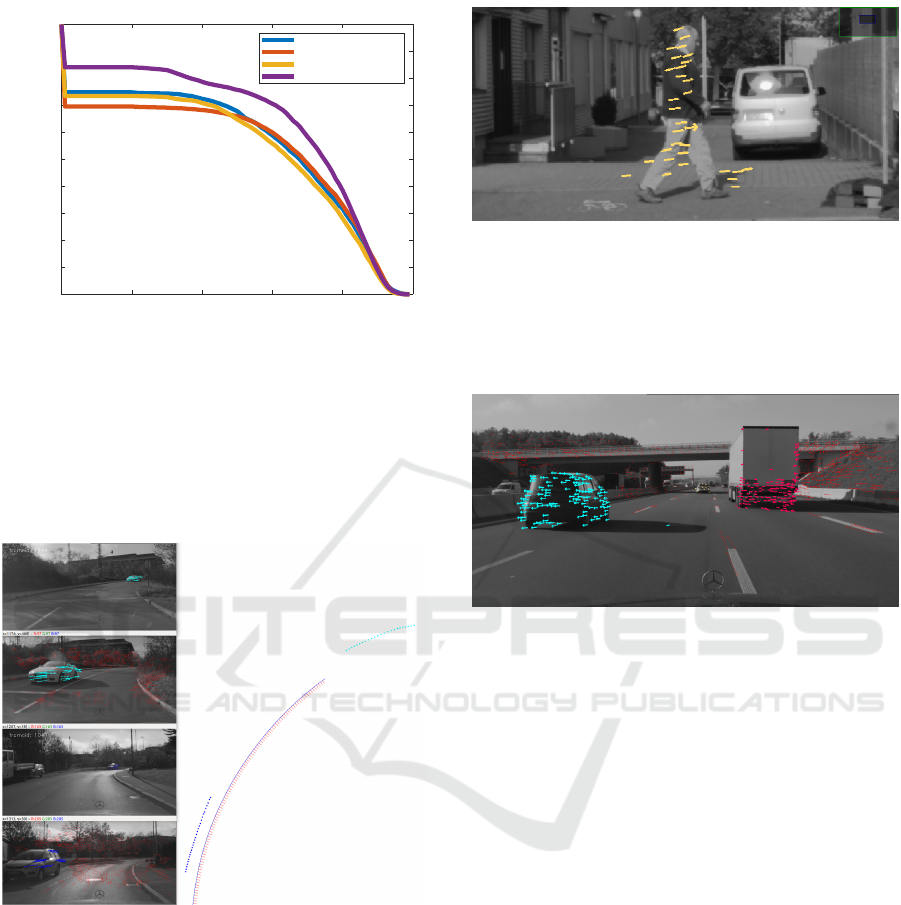
Figure 6: Starting bottom left, the RGB coordinate axis
shows the car trajectory. The colored dots show the various
IMOs encountered and their estimated trajectories. Some
are driving in the lane to the left, others along the same lane.
Best viewed electronically.
IMOs cover separate parts of and therefore compete
for a single GT object. More concerningly the system
fails to detect a fair number of the annotated objects.
There are two main causes for false negatives. The
first case is a insufficient deviation from the world ge-
ometry tracking. This happens for objects that are too
far away, especially if they are driving away from the
observer. A single car driving away in the same lane
at a distance above 35m results in nearly a third of
all missing detections. The second case is that the
tracker or stereo has failed, which happens for objects
that are moving or warping too fast in the image. This
is a fundamental failure of the tracker and could be
addressed by better tracking.
4.3 MOTS and KITTI Results
Shire sample results on the MOTS and KITTI se-
quences are shown in Figure 7. The Shire parameters
are based on tracker and disparity system properties.
Therefore we expect they should work for the MOTS
and KITTI dataset as well as our. Thus the same pa-
rameters are used throughout.
Qualitatively the performance is slightly worse
compared to results on our own dataset. Primarily in
terms of the number of false positives. This may be
partially explained by the frame-rate difference, as the
Figure 7: Top image shows performance on the KITTI
benchmark, bottom image shows performance on the
MOTS benchmark. Note that the color image from MOTS
was converted to grey scale for illustration purposes.
expected parallax increases. Though the difference in
sensor characteristics, baseline and resolution may be
contributing. We also note that performance is sub-
par to the MOTSFusion system, though we do note
that our system is more than ten times faster. The per-
formance on the MOTS varies significantly between
sequences, but not by scene complexity as may be ex-
pected. A possible explanation is that the calibration
is slightly worse for some sequences. A calibration
error of 1-3 pixels instead of 0-1 pixel error would
be sufficient, as Shire is sensitive to calibration errors
due to the assignment mechanism. This problem does
not appear to apply to the KITTI sequences which use
the grey scale cameras instead of the RGB cameras.
Since the grey cameras were calibrated for the VO
challenge, but the RGB cameras have primarily been
used for deep learning, we would not be surprised if
they are better calibrated.
4.4 Conclusion
We have presented stereo based Sequential Hierarchi-
cal Ransac Estimation (Shire). Shire detects and esti-
mates, in realtime, the 6D pose trajectories of multiple
moving objects, and the egomotion using geometric
consistency alone. The system can benefit from se-
mantic segmentation, but, unlike for similar methods,
it is not required. Shire can be used to predict object
trajectories for path planning with dynamic obstacles.
It can also detect spatiotemporally separable objects,
which form an interesting semantic class, or be used
to generate ground truth for optical flow including that
on moving objects. Though we leave the training of
self supervised systems using Shire as future work.
We provide the core Shire code, and the dataset used
for evaluation, as well as annotation and evaluation
tools (Persson, 2020).
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
730

REFERENCES
Agarwal, S., Mierle, K., and Others (2020). Ceres solver.
http://ceres-solver.org.
Badino, H., Yamamoto, A., and Kanade, T. (2013). Visual
odometry by multi-frame feature integration. In First
International Workshop on Computer Vision for Au-
tonomous Driving at ICCV.
Cordts, M. (2017). Understanding Cityscapes: Efficient
Urban Semantic Scene Understanding. PhD thesis,
Technische Universit
¨
at, Darmstadt.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic urban
scene understanding. In Proc. of the IEEE Conference
on Computer Vision and Pattern Recognition (CVPR).
Cvi
ˇ
si
´
c, I.,
´
Cesi
´
c, J., Markovi
´
c, I., and Petrovi
´
c, I. (2017).
Soft-slam: Computationally efficient stereo visual
slam for autonomous uavs.
Engel, J., Koltun, V., and Cremers, D. (2018). Direct sparse
odometry. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 40(3):611–625.
Gauglitz, S., Foschini, L., Turk, M., and Hollerer, T. (2011).
Efficiently selecting spatially distributed keypoints for
visual tracking. In Image Processing (ICIP), 2011
18th IEEE International Conference on, pages 1869–
1872.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? the kitti vision benchmark
suite. In Conference on Computer Vision and Pattern
Recognition (CVPR).
Hirschm
¨
uller, H. (2008). Stereo processing by semi-global
matching and mutual information. in IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
30:328–341.
Klein, G. and Murray, D. (2007). Parallel tracking and
mapping for small AR workspaces. In Proc. Sixth
IEEE and ACM International Symposium on Mixed
and Augmented Reality (ISMAR’07), Nara, Japan.
Long, J., Shelhamer, E., and Darrell, T. (2015). Fully con-
volutional networks for semantic segmentation. In
The IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR).
Luiten, J., Fischer, T., and Leibe, B. (2019). Track to recon-
struct and reconstruct to track.
Ma, W.-C., Wang, S., Hu, R., Xiong, Y., and Urtasun, R.
(2019). Deep rigid instance scene flow.
Mur-Artal, R. and Tard
´
os, J. D. (2017). ORB-SLAM2:
an open-source SLAM system for monocular, stereo
and RGB-D cameras. IEEE Transactions on Robotics,
33(5):1255–1262.
Persson, M. (2020). IMO dataset. https://www.cvl.isy.liu.
se/research/datasets/imo-dataset/.
Persson, M. and Nordberg, K. (2018). Lambda twist:
An accurate fast robust perspective three point (p3p)
solver. In The European Conference on Computer Vi-
sion (ECCV).
Persson, M., Piccini, T., Mester, R., and Felsberg, M.
(2015). Robust stereo visual odometry from monoc-
ular techniques. In IEEE Intelligent Vehicles Sympo-
sium.
Rabe, C. (2012). Detection of Moving Objects by Spatio-
Temporal Motion Analysis: Real-time Motion Estima-
tion for Driver Assistance Systems. S
¨
udwestdeutscher
Verlag f
¨
ur Hochschulschriften. ISBN 978-3-8381-
3219-8.
Vogel, C. and Roth, S. (2015). 3d scene flow estimation
with a piecewise rigid scene model. International
Journal of Computer Vision, 115.
Wang, R., Schw
¨
orer, M., and Cremers, D. (2017). Stereo
DSO: Large-scale direct sparse visual odometry with
stereo cameras. In International Conference on Com-
puter Vision (ICCV17).
Independently Moving Object Trajectories from Sequential Hierarchical Ransac
731
