
Lightweight Filtering of Noisy Web Data:
Augmenting Fine-grained Datasets with Selected Internet Images
Julia B
¨
ohlke
1
, Dimitri Korsch
1
, Paul Bodesheim
1
, and Joachim Denzler
1,2,3
1
Computer Vision Group, Friedrich Schiller University Jena, Ernst-Abbe-Platz 2, Jena, Germany
2
Deutsches Zentrum f
¨
ur Luft- und Raumfahrt e.V. (DLR), Institute for Data Science (IDW), M
¨
alzerstraße 3, Jena, Germany
3
Michael Stifel Center Jena for Data-Driven and Simulation Science, Ernst-Abbe-Platz 2, Jena, Germany
Keywords:
Noisy Web Data, Label Noise Filtering, Fine-grained Categorization, Duplicate Detection.
Abstract:
Despite the availability of huge annotated benchmark datasets and the potential of transfer learning, i.e., fine-
tuning a pre-trained neural network to a specific task, deep learning struggles in applications where no labeled
datasets of sufficient size exist. This issue affects fine-grained recognition tasks the most since correct image
data annotations are expensive and require expert knowledge. Nevertheless, the Internet offers a lot of weakly
annotated images. In contrast to existing work, we suggest a new lightweight filtering strategy to exploit this
source of information without supervision and minimal additional costs. Our main contributions are specific
filter operations that allow the selection of downloaded images to augment a training set. We filter test du-
plicates to avoid a biased evaluation of the methods, and two types of label noise: cross-domain noise, i.e.,
images outside any class in the dataset, and cross-class noise, a form of label-swapping noise. We evaluate
our suggested filter operations in a controlled environment and demonstrate our methods’ effectiveness with
two small annotated seed datasets for moth species recognition. While noisy web images consistently im-
prove classification accuracies, our filtering methods retain a fraction of the data such that high accuracies are
achieved with a significantly smaller training dataset.
1 INTRODUCTION
The field of computer vision utilizes huge, pub-
licly available datasets to develop and compare meth-
ods. Famous datasets, such as ImageNet (Rus-
sakovsky et al., 2015), aim at the classification of
objects from our daily life, like pedestrians, desks,
cats, and dogs, while datasets such as CUB-200-
2011 (Wah et al., 2011) and iNaturalist (Van Horn
et al., 2018) pose fine-grained classification problems.
The performance in terms of classification accuracy
on these benchmark datasets has continuously im-
proved through innovations in deep neural network
architectures and transfer learning. Achieving fur-
ther boosts in classification performance through even
larger datasets stands in no relation to the overhead
of acquiring a larger dataset. However, application-
oriented, specific classification problems often lack
sufficient training data and would benefit from addi-
tional images.
One prominent example of this situation is found
in the field of biodiversity research. The classifica-
tion of moth species, a fine-grained recognition prob-
lem, is necessary to monitor the population changes.
Unfortunately, constructing a robust classifier with a
convolutional neural network (CNN) cannot be done
out of the box for this use case. The number of train-
ing samples is crucial for good recognition perfor-
mances due to the high number of parameters in a
CNN model. Since only experts can reliably distin-
guish very similar looking species, training datasets
for such a highly specific task often consist of very
few images. Generally, the generation of high-quality
data in the field of fine-grained classification is an ex-
pensive and challenging task.
However, in many cases, there is a rich source
of information available in the form of weakly la-
beled images on the Internet, accessible through im-
age search engines. In such a situation, images from
the Internet might enrich a small seed training dataset
collected by experts. As demonstrated by (Krause
et al., 2016), noisy data from the Internet can sig-
nificantly improve the classification performance for
fine-grained datasets. As the authors mention in their
work, one should clean the noisy data before using
it to train a classification model. They use addi-
466
Böhlke, J., Korsch, D., Bodesheim, P. and Denzler, J.
Lightweight Filtering of Noisy Web Data: Augmenting Fine-grained Datasets with Selected Internet Images.
DOI: 10.5220/0010244704660477
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
466-477
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reser ved
Internet
Final
Train
Set
Filters
Test
Duplicates
(Sect. 3.2)
Test
Set
Augment
Set
Cross-domain
Noise
(Sect. 3.3)
Cross-class
Noise
(Sect. 3.2)
Class B
Class A
Class A
Class C
Augment Set
Class B
Class C
Seed Set
Test Set
Train Set
Augment Set
Negative / Positive
Clusters
Seed / Augment
Data
Duplicates
Seed / Augment
Features
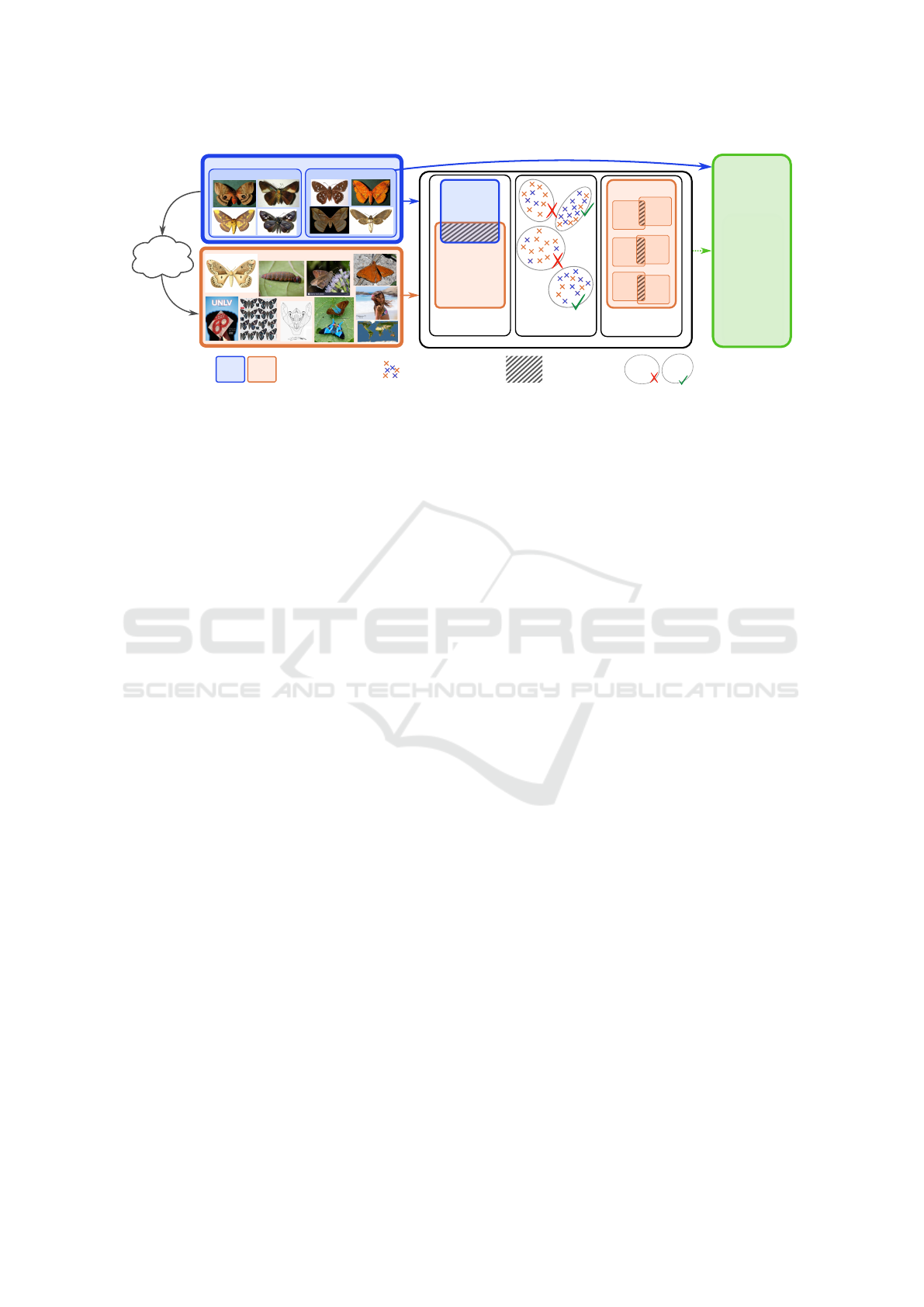
Figure 1: Overview of our approach. The results returned by image search engines when searching for the class names of the
seed dataset are downloaded and constitute the augmentation dataset. Subsequently, filtering methods take the seed dataset as
source of information to decide which augment images are added to the final training dataset. Our duplicate detection method
is used to handle test duplicates and cross-class noise. A clustering-based approach is used to filter out cross-domain noise.
tional models and sophisticated training procedures to
achieve their results.
In contrast, we suggest a new strategy to exploit
images from the Internet without supervision and
minimal additional costs. We call this lightweight fil-
tering, and the process is summarized in Figure 1.
Given a small, precisely annotated seed dataset, we
use the species names as queries for an image search
engine. Then, we use the search results as an aug-
mentation dataset, also referred to as augment set, to
extend the seed dataset. Likely, some of the down-
loaded images are already part of the test set, espe-
cially if the seed dataset is publicly available. These
images would distort the evaluation results and yield
a worse generalization behavior as the model is pro-
moted to memorize the test duplicates in the training
set. Therefore, the downloaded images need to be
cleaned from test duplicates to ensure a fair model
evaluation. Unlike (Krause et al., 2016), who use a
sophisticated deep ranking model (Wang et al., 2014),
we filter test duplicates without training additional
models. In Sect. 3.2, we present an unsupervised
ranking-based duplicate detection method. Besides
exact duplicates, we also identify near-duplicates,
i.e., image pairs that originated from the same cam-
era shot but with slight transformation, contrast, or
resolution changes.
Furthermore, the image acquisition from the Inter-
net introduces label noise in the augmentation dataset.
We differentiate between two types of label noise:
cross-domain noise and cross-class noise. A domain
of a dataset is a broader category to which the classes
of a dataset belong. In the case of the CUB-200-2011
dataset (Wah et al., 2011), the domain is birds. As
a result, all images depicting not a bird are cross-
domain noise. Images within the dataset domain but
with a wrong class label are cross-class noise, i.e., an
American Crow image downloaded for the Common
Raven class. Note that cross-class noise is not re-
stricted to the original classes from the seed dataset
but by the domain it defines. For CUB-200-2011,
an image of any bird downloaded in the wrong class
would be considered as cross-class noise.
We detect cross-class noise with a ranking-based
duplicate detection method described in Sect. 3.2. In
Sect. 3.3, we propose a novel clustering-based ap-
proach to identify out-of-domain images and to re-
duce cross-domain noise. To the best of our knowl-
edge, cross-domain noise in fine-grained datasets has
not been addressed so far. Hence, our contribution
is a set of methods for handling the entire range
of problems that arise when using weakly annotated
data from the Internet for dataset augmentation. Fi-
nally, we evaluate our experiments on various datasets
(Sect. 4). Using a real-world biodiversity task, our
experiments show that the proposed filtering meth-
ods retrain the classification performance even though
they reduce the amount of training data by about 58%.
2 RELATED WORK
In this section, we review four topics related to our
work: fine-grained classification (Sect. 2.1), handling
different types of label noise (Sect. 2.2), data set aug-
mentation using images from the Internet (Sect. 2.3),
and identifying duplicate images (Sect. 2.4).
2.1 Fine-grained Classification
Fine-grained classification refers to distinguishing
classes with small inter-class variance, i.e., classes
Lightweight Filtering of Noisy Web Data: Augmenting Fine-grained Datasets with Selected Internet Images
467

differ only in few distinctive features. Biodiversity re-
search is one of the areas applying fine-grained clas-
sifiers to distinguish different animal species. There
are two main approaches for tackling this task: part-
or attention-based methods using global features ex-
tracted from the whole image.
Part-based approaches employ the idea of extract-
ing relevant local regions of an image that are often
interpreted as parts of the object and perform the clas-
sification based on features from these regions (Ge
et al., 2019; Korsch et al., 2019; Zheng et al., 2017).
On the other hand, global approaches aim to clas-
sify instances without extracting any parts but instead
use images entirely. These methods use either a so-
phisticated pre-training (Cui et al., 2018) or a specific
feature pooling technique (Lin et al., 2015; Simon
et al., 2017). We stick to the global approach to avoid
the overhead introduced by part-based approaches
and thus keep our model comparably lightweight in
terms of required computational costs.
2.2 Label Noise Handling
Existing work dealing with label noise can be divided
into methods robust against label noise and cleansing
methods.
Robust methods such as (Cortes and Vapnik,
1995; Xiao et al., 2015; Zhuang et al., 2017) aim to
learn directly from noisy data using a noise-tolerant
learning algorithm. Often these approaches rely on
complex models, relatively low levels of label noise,
or require some prior knowledge of either the noise
distribution or the noise-inducing process. (Rolnick
et al., 2017) investigated robust CNN architectures
and hyperparameters. They showed empirically that
deep neural networks are surprisingly robust to high
levels of label noise when the total number of clean la-
bels is high. However, this rarely holds when consid-
ering only small seed datasets or in the case of many
falsely labeled images. While robust methods might
be a cheap option when dealing with noise, reducing
label noise would likely lead to better performances.
With cleansing methods, the data is pre-processed
and mislabeled data is removed or relabeled. The
challenge in identifying noisy instances is the sepa-
ration of correctly labeled instances that are hard to
classify (because they deviate from the norm) from
actually mislabeled ones. These hard-to-classify in-
stances are valuable in a training set because they
capture a wider diversity of appearance for the cor-
responding class.
An overview of label noise handling methods is
given by (Fr
´
enay and Verleysen, 2013). Further ap-
proaches include ensemble methods (Garcia et al.,
2016), semi-supervised verification of support vectors
by (Fefilatyev et al., 2012), probabilistic approaches
and anomaly detection techniques (Eskin, 2000; Ak-
cay et al., 2018; Zhang and Tan, 2019), our out-
lier detection methods, e.g., utilizing class-wise auto-
encoders (Zhang and Tan, 2019).
In contrast, an unsupervised approach was pro-
posed by (Nicholson et al., 2015). They used k-Means
clustering, an algorithm entirely independent of labels
and, therefore, of label noise, to cluster the weakly la-
beled data and identify noise using cluster statistics.
We use a simplified version of this clustering-based
idea described in Sect 3.3.
2.3 Images from the Internet
Utilizing the vast visual information available on the
Internet requires dealing with label noise. Several ap-
proaches (Li and Fei-Fei, 2010; Zhang et al., 2020;
Xu et al., 2015; Chen et al., 2013; Berg and Forsyth,
2006; Schroff et al., 2010) are built on the idea of
incrementally constructing a training set by choosing
useful images from weakly labeled data with a model
trained on a small, precisely labeled dataset. These
strategies often rely on a representative, diverse seed
dataset and involve high computational costs when re-
training a model with added data. In contrast, we aim
for computationally lightweight solutions for filtering
label noise.
(Krause et al., 2016) showed the potential of
noisy data from the Internet for several popular fine-
grained recognition datasets. They gathered the re-
sults of several image search engines when using cat-
egory names as search query keywords. Thus, they
added more fine-grained categories of the correspond-
ing domain for each dataset and downloaded images
for these new categories in the same way. Further-
more, they identified test duplicates with a method
by (Wang et al., 2014) described in Sect. 2.4. They
argued that cross-domain noise was less detrimental
and only handled cross-class noise by removing am-
biguous images downloaded multiple times for dif-
ferent classes. We expand on this approach. In sum-
mary, our work differs from the approach of (Krause
et al., 2016) in three crucial aspects. First, in the
case of the cross-class noise, we additionally filter
near-duplicates while (Krause et al., 2016) only con-
sider exact duplicates. Second, our approach with
lightweight filtering methods do not require addi-
tional and computationally expensive pre-training of
a neural network model with the downloaded images.
Third, we additionally propose a method for han-
dling cross-domain noise, which has been ignored by
(Krause et al., 2016).
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
468

As an alternative to dataset augmentation, also
few-shot learning approaches could be considered.
Recent work in this area focuses on metric learn-
ing (Sung et al., 2018; Snell et al., 2017) or com-
plex LSTM models (Ravi and Larochelle, 2016).
Although impressive accuracies can be achieved on
small datasets using these approaches, we follow the
strategy of exploiting additional image data that is
available via the Internet.
2.4 Duplicate Detection
Duplicate detection is essential to identify test dupli-
cates in the augment set and handle cross-class noise.
The task is not trivial if, besides exact duplicates, also
near-duplicates need to be detected. Furthermore,
efficiency plays a crucial role since the number of
comparisons grows with the number of samples in a
dataset.
Traditionally, efficient duplicate detection was
done by comparing hand-crafted features extracted
from the images (Ke et al., 2004; Luo and Nasci-
mento, 2003; Wang et al., 2006). Feature represen-
tations of images learned by a CNN offer an alterna-
tive to the hand-crafted features, as shown by (Barz
and Denzler, 2020). They explored the presence of
duplicates between training and test set in the well-
known and widely-used CIFAR-10 and CIFAR-100
datasets (Krizhevsky, 2009). L
2
-normalized feature
representations were extracted for all images from a
CNN pre-trained on the respective training set. The
test images were then ranked based on the nearest
neighbor in the training set concerning the Euclidean
distance in this feature space. Because simply thresh-
olding this distance resulted in a high false-positive
rate, they proposed a tool for manually identifying du-
plicates, which utilizes the ranking to reduce the num-
ber of comparisons. With this approach, they found
that 3.25 % of the CIFAR-10 test images and 10 % of
the CIFAR-100 test images had a duplicate either in
the training set or within the test set.
Another way of duplicate identification is metric
learning. The most prominent work is the deep rank-
ing method by (Wang et al., 2014), which was also
used by (Krause et al., 2016) to identify test dupli-
cates. The aim is to learn an embedding of the images
in a lower-dimensional space, where similar images
are located close to each other, and dissimilar ones
are far apart. Since metric learning involves train-
ing a CNN and an appropriate dataset, we employ the
lightweight variant of the idea proposed by (Barz and
Denzler, 2020) and utilize a CNN pre-trained on Im-
ageNet for feature extraction.
3 METHODS
In the following section, we formally define generic
noise filters. We then introduce our filtering methods
in detail: we use a cluster-based approach for cross-
domain noise filtering and duplicate detection to de-
tect test duplicates and cross-class noise. Finally, we
describe a method for a dataset generation that can be
used to evaluate any cross-domain filtering method.
3.1 Problem Definition
In this work, we consider two different types of
datasets. The first one is a labeled seed dataset
T
seed
= {(x
1
, y
1
), . . . , (x
N
, y
N
)} with images X
seed
=
{x
1
, . . . , x
N
} and class labels Y
seed
= {y
1
, . . . , y
N
}.
Based on the class names associated with the labels,
we construct a second dataset called augment dataset.
As mentioned in Sect. 1, we create this one using an
image search engine, i.e., Google Image Search. The
resulting dataset T
aug
= {( ˆx
1
, ˆy
1
), . . . , ( ˆx
M
, ˆy
M
)} con-
sists of web images X
aug
= { ˆx
i
, . . . , ˆx
M
} and noisy la-
bels Y
aug
= { ˆy
1
, . . . , ˆy
M
}.
In the following sections, we will describe several
functions belonging to a set of binary filter functions
F = { f
1
, . . . , f
L
}, which decide for each image in X
aug
whether it is added to the final training set depending
on the desired filtering behavior. An image in X
aug
is only added to the final training dataset if all of the
functions in F select the image:
T
f inal
= T
seed
∪
{( ˆx
i
, ˆy
i
) | ˆx
i
∈ X
aug
∧ ∀ f ∈ F : f ( ˆx
i
) = 1}. (1)
The images in T
f inal
are then used to train or fine-tune
a classification model.
We create the final training set based on the de-
cision functions F, which may vary for different ex-
perimental setups. For example, we might test how
the classification model performs when only test du-
plicate filtering is applied.
3.2 Filters for Test Duplicates and
Cross-class Noise
As mentioned before, we utilize duplicate detection
for both identifying test duplicates and filtering cross-
class noise. Test duplicates, i.e., images in the aug-
ment set that have a duplicate in the test set, are fil-
tered out class-wise. Training on images in the aug-
ment set that have a duplicate with the same class la-
bel in the test set would lead to an unfair overestima-
tion of the recognition accuracies and distort the eval-
uation of the classification. However, training with
duplicates in different classes is less critical, since this
Lightweight Filtering of Noisy Web Data: Augmenting Fine-grained Datasets with Selected Internet Images
469

does not affect the results positively but instead leads
to an underestimation of accuracies. Hence, we do
not consider test duplicates in different classes.
Dealing with cross-class label noise is problem-
atic because, in a fine-grained domain, only experts
can identify wrongly labeled instances. (Krause et al.,
2016) handled this problem by filtering out all im-
ages that had an exact duplicate in a different class
of the augment set. Strictly speaking, this does not
filter cross-class noise but instead mitigates the is-
sue by removing ambiguous images. We expand on
this idea and further exploit its potential by filtering
images that also have near-duplicates in a different
class. Thus, we apply near-duplicate detection for
cross-class noise filtering.
We identify duplicates with two similarity mea-
sures. First, we utilize the structural similarity in-
dex (SSIM) proposed by (Wang et al., 2004), a
pixel-based image comparison method that takes lu-
minance, contrast, and structural distortions via a
sliding-window approach into account. Second, we
use the cosine similarity computed by dot product
(Dot) of L
2
-normalized feature representations ex-
tracted from a pre-trained CNN.
For each image ˆx
i
in the augment set, we compute
four similarity scores either to images in a subset of
T
test
for test duplicate filtering, or to images in a sub-
set of T
aug
for cross-class filtering. For the sake of
simplicity, we call this subset T
ˆx
i
for both cases. In
the case of test duplicate filtering, we are only inter-
ested in class-wise duplicates such that T
ˆx
i
consists
of all images in T
test
from the same class ˆy
i
as ˆx
i
. For
filtering cross-class noise, T
ˆx
i
consists of all images
in T
aug
that have a different class label ˆy 6= ˆy
i
than ˆx
i
.
The first two scores are calculated as follows:
maxDot( ˆx
i
) = max
x
j
∈T
ˆx
i
Dot( ˆx
i
, x
j
) (2)
maxSSIM( ˆx
i
) = max
x
j
∈T
ˆx
i
SSIM( ˆx
i
, x
j
) (3)
where Dot(·, ·) computes the dot product of L
2
-
normalized features of the input images and
SSIM(·, ·) computes the structural similarity in-
dex (Wang et al., 2004) of two images. For the sake
of completeness, we also compute the other score
for each pair of images with maximum value for one
score. This leads to the third and fourth score:
SSIM
maxDot
( ˆx
i
) = SSIM( ˆx
i
, argmax
x
j
∈T
ˆx
i
Dot( ˆx
i
, x
j
)) (4)
Dot
maxSSIM
( ˆx
i
) = Dot( ˆx
i
, argmax
x
j
∈T
ˆx
i
SSIM( ˆx
i
, x
j
)) (5)
An image x
j
in maxDot( ˆx
i
) and maxSSIM( ˆx
i
) might
denote two different images for the same ˆx
i
, hence, we
extract more information than if we only computed
the maximum scores.
Finally, each score defines an ordered list of the
images in the augment dataset by sorting them in de-
scending order concerning the obtained values. All
four lists are used to estimate duplicates from the aug-
ment dataset as follows. Starting with D = 1 and later
gradually incrementing D by 1, we consider an aug-
ment image a duplicate if present in the first D im-
ages of all four lists. We repeat this incrementation
until the required portion of images is identified as
duplicates and removed from the augment set. This
portion is a hyperparameter that also depends on the
type of data that needs to be filtered. It can be speci-
fied by either using apriori knowledge about the level
of duplicates or assuming a fraction of duplicates that
is reasonable to expect for a particular application. In
case of test duplicate filtering (TD), the filter function
f
T D
selects images from the augment set T
aug
for the
final training set that do not fall into the portion of
T
aug
identified as having a duplicate in the test set.
For cross-class noise filtering, the subset T
ˆx
i
for
each image ˆx
i
is considerably larger than for test du-
plicate filtering. Therefore, we utilized two tricks to
speed up computations. First, we approximate the
maxSSIM( ˆx
i
) score for each image ˆx
i
by searching
only among the ten images in the set T
ˆx
i
that have the
highest dot product. Second, we identify exact dupli-
cates by comparing MD5 hashes
1
of the images and
skip the computations of the scores for those images.
Furthermore, for cross-class noise filtering, the
parameter portion is set such that it depends on how
many exact duplicates are detected using MD5 hash
values. For this purpose, we introduce another pa-
rameter called relative portion. Formally, if M
MD5
is the total number of images in the augment set that
have an exact duplicate, then the final portion of the
augment set removed by cross-class noise filtering
is (1 + relative portion) · M
MD5
. With this method,
we specify the number of images that are filtered
additionally to the exact duplicates as a percentage
(relative portion) of total exact duplicates and ensure
that exact duplicates are always filtered. Our cross-
class noise filtering function f
CC
selects images from
the augment set T
aug
to be added to the final training
set if they neither have an exact duplicate nor fall into
the set of images defined by relative portion for hav-
ing a near-duplicate in T
aug
.
3.3 Cross-domain Noise Filter
This filter aims to identify images that do not depict
the domain of the seed dataset T
seed
. To achieve this,
1
https://tools.ietf.org/html/rfc1321
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
470

we use CNN features of the images and compare them
using a clustering approach. Intuitively, features of
those images in T
aug
that belong to the domain of T
seed
have smaller distances to features of images from the
seed dataset. After jointly clustering images of the
augment and the seed training set, the clusters that
contain a certain amount of the seed dataset indicate
clusters of images belonging to the domain. Thus, im-
ages from T
aug
in these clusters can then be identified
as images within the domain, while clusters with few
seed training images most likely contain the out-of-
domain images from T
aug
called cross-domain noise.
We call a cluster a strong positive cluster if it con-
tains more than
N
k
samples of the seed data with N be-
ing the number of training samples in the seed dataset
and k being the number of clusters. When cluster-
ing with a considerable value for k, the seed images
are likely spread across more clusters. The adaptive
threshold that depends on k accounts for this and en-
sures that strong positive clusters are identified.
If the seed dataset is visually homogeneous, all
seed images are likely assigned to only a small frac-
tion of the clusters. Even though the augment dataset
contains images of the same domain, these images
would not be assigned to strong positive clusters, but
to nearby ones. We mitigate this effect by also iden-
tifying weak positive clusters as those with small Eu-
clidean distance to strong positive clusters. More pre-
cisely, a cluster is weak positive if its center is closer
to one of the strong positive cluster centers than the
average pairwise distance between all cluster centers.
We end up with two functions for cross-domain
noise filtering: f
CD
strong
selects images for the final
training dataset from T
aug
that are assigned to a strong
positive cluster and f
CD
weak
retains images assigned to
either a strong positive or a weak positive cluster.
3.4 Generating Datasets with
Controlled Cross-domain Noise
To evaluate cross-domain noise filtering, we propose
a method for generating datasets that contain cross-
domain noise with different levels of noise. The aim
is to create a controlled setting with a seed dataset and
a noisy augment dataset, where a controlled amount
of cross-domain noise occurs.
To construct a dataset with a pre-defined data-to-
noise ratio, we require two datasets. The first dataset
is a fine-grained dataset, which defines the domain of
the classification task. A small subset of the training
images from this first dataset is used as a seed dataset.
The rest of the training images are added to the aug-
ment set as positive, non-noisy samples, which should
be retained by the cross-domain noise filter.
The negative samples that should be filtered out
are gathered from a second dataset. We have cho-
sen ImageNet (Russakovsky et al., 2015) as a coarse-
grained dataset for image classification. We aim to
select samples that are somehow related to the seed
dataset but outside the domain, i.e., caterpillars for
moths, as well as unrelated samples that a search en-
gine might return. We rank each class of the sec-
ond dataset according to its similarity to the entire
first dataset. We compute the similarity by follow-
ing the approach of (Cui et al., 2018) that utilizes
the earth mover’s distance (EMD). After obtaining a
ranking of the classes from the second dataset, we
discard the Top-X classes (in the case of ImageNet,
we discard 100 classes). As a result, we do not con-
sider classes belonging to the first dataset’s domain as
cross-domain inducing classes. Afterward, we rank
the remaining classes according to the similarity to
a single class form the seed dataset. Finally, we use
these rankings to construct for each class in the seed
dataset its own cross-domain noise. Thus, we sam-
pled images uniformly from the S
1
=10 most related
and S
2
=10 least related classes that are determined
for each class of the seed dataset. The number of
images sampled from these classes depends on the
specified data-to-noise ratio that the final augmenta-
tion dataset should have.
4 EXPERIMENTS
Our experiments have three main objectives: (i) eval-
uating the cluster-based cross-domain noise filter, (ii)
applying the duplicate detection method for identify-
ing test duplicate and filtering cross-class noise, and
(iii) testing the filter methods in a real-world applica-
tion, where a small fine-grained dataset is augmented
using web images that are filtered successively.
4.1 Datasets
We use two seed datasets, namely Costa Rica Moths
and European Moths, for our application of moth
species recognition. We augment these datasets with
images obtained from the Internet, and we call these
augmentation datasets Web Costa Rica Moths and
Web European Moths, respectively. We also use
the CIFAR-10 and CIFAR-100 datasets (Krizhevsky,
2009) together with the annotations from the cor-
responding ciFAIR counterparts (Barz and Den-
zler, 2020) and extensions of the CUB-200-2011
dataset (Wah et al., 2011) called Noisy CUB-200-
2011 for testing individual filtering methods. All
these datasets are described in the following.
Lightweight Filtering of Noisy Web Data: Augmenting Fine-grained Datasets with Selected Internet Images
471

Costa Rica Moths: A small fine-grained seed
dataset, initially introduced by (Rodner et al., 2015),
depicts pinned moths from 331 species found in a
conservation area in northwest Costa Rica. The wings
of the moths are spread out artificially to show the
features of the hind wings. With only 990 training
images (and 1,320 for testing), this is a rather small
dataset. The moths were photographed from two per-
spectives, top and bottom, making the dataset more
challenging as a species’ appearance differs remark-
ably between both sides. This intensifies the problem
of few training images per class.
Web Costa Rica Moths: We augment the Costa
Rica Moths dataset with images downloaded with the
Google Image Search engine. We used species names
as keywords and saved up to 30 images per class. Af-
ter initial cleaning of unsupported image types, this
dataset consists of 10,124 (990 seed and 9,134 aug-
mentation) images. Furthermore, to evaluate our pro-
posed duplicate filter method, we checked manually
for duplicates in the test set of the Costa Rica Moths
dataset. To identify the duplicates, we used the tool
proposed by (Barz and Denzler, 2020). We found that
32 downloaded images have either an exact or a near-
duplicate in the test set.
European Moths: This is another small fine-grained
seed dataset of 100 moth species found in Europe,
which were photographed using a light trap. Each
class has three images in the training set and eight
test images. This dataset is not publicly available.
Web European Moths: We augment the European
Moths dataset with images obtained in the same way
as for Web Costa Rica Moths. After removing unsup-
ported image types, each class had between 90 and 99
downloaded images left, leading to a dataset of 9,691
(300 seed and 9,391 augmentation) images in total.
Since the original dataset of European Moths is not
publicly available, the Web European Moths dataset
does not contain test duplicates.
CIFAR / ciFAIR: In their work, (Barz and Den-
zler, 2020) probed the widely known CIFAR-10 and
CIFAR-100 datasets for duplicates. We use their find-
ings to evaluate our duplicate detection method pre-
sented in Sect. 4.3
Noisy CUB-200-2011: We have generated noisy
datasets with a varying amount of cross-domain noise
following our descriptions in Sect. 3.4. We have cho-
sen the CUB-200-2011 dataset (Wah et al., 2011) for
the first dataset, which defines the domain and origi-
nally consists of roughly 12,000 images from 200 bird
species. The dataset is balanced, and the images are
split evenly in a training and test set, resulting in about
30 training and 30 test images per class. We have
picked 5 images per class from the training dataset to
produce the seed dataset. The rest of the training data
from the original dataset was used in the augmenta-
tion set, defining the positive, non-noisy images. The
induced cross-domain noise comes from classes of
ImageNet (Russakovsky et al., 2015) as described in
Sect. 3.4, where the Top-100 classes are discarded in
the first ranking. The S
1
=10 most related and S
2
=10
least related classes according to the second rankings
are used for sampling noisy images uniformly. The
number of sampled noisy images depends on the de-
sired data-to-noise ratio in the augmentation set.
4.2 Evaluating Cross-Domain Noise
Filtering
To evaluate the cross-domain noise filter, we utilized
the Noisy CUB-200-2011 dataset. We checked how
many positive samples were retained and how many
negative samples were rejected in this controlled en-
vironment. Therefore, we created four datasets with
different data-to-noise ratios: 2:1, 1:1, 1:2, and 1:10.
Afterward, we applied our proposed filtering method
(Sect. 3.3) and observed the retention and rejection
rates. As can be seen in Figure 2, our filtering method
is robust across different noise levels. Furthermore,
the retention and rejection rates stabilize with an in-
creasing number of clusters.
Additionally, we perform classification experi-
ments on the Noisy CUB-200-2011 dataset. As a first
baseline, we train on the seed dataset consisting of
5 images per class randomly chosen among the pos-
itive samples. For a second baseline, we train on the
merged dataset that is the class-wise union of the seed
dataset and the unfiltered augment dataset. Figure 3
shows the classification accuracies for different data-
to-noise ratios in the augment sets. The augmentation
of the seed dataset consistently improves the classifi-
cation from roughly 50 % to over 75 %. As expected,
a more significant amount of out-of-domain images
reduces the performance significantly. When apply-
ing our proposed cross-domain filtering to the aug-
ment sets, the classification performance remains sta-
ble, even at high data-to-noise ratios.
4.3 Evaluating Our Duplicate Detection
Method
We evaluated the general approach of our ranking-
based duplicate detection method on three datasets:
CIFAR-10, CIFAR-100, and Web Costa Rica Moths.
Therefore, we used the annotations provided by (Barz
and Denzler, 2020) for duplicates of the CIFAR
datasets. In the case of the Web Costa Rica Moths,
we used our manual annotations.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
472

k = 2
k = 5
k = 10
k = 20
k = 50
0
50
100
Data-to-noise ratio: 2:1
k = 2
k = 5
k = 10
k = 20
k = 50
0
50
100
Data-to-noise ratio: 1:1
k = 2
k = 5
k = 10
k = 20
k = 50
0
50
100
Data-to-noise ratio: 1:2
k = 2
k = 5
k = 10
k = 20
k = 50
0
50
100
Data-to-noise ratio: 1:10
Figure 2: Percentage of data and noise retained after applying our proposed cross-domain filtering method with a varying
number of clusters k. The top box plot at each setup (which has shrunk to a lines due to low variance in some cases) indicated
the percent of positive data retained while the bottom box plot shows the percent of noise retained. At k = 50 our method
performs consistently well across all data-to-noise ratios.
2:1 1:1 1:2 1:10
Data-to-noise ratio
50
60
70
80
Accuracy in %
Training on 5 seed samples
Merged, no filter
Merged, CD filter (k = 50)
Merged, CD filter (k = 20)
Figure 3: Performance development with different data-to-
noise ratios. Here, baseline refers to training with 5 ran-
dom positive samples from the CUB200-2011 training im-
ages. The merged dataset is this seed dataset joined with the
different augment datasets of different data-to-noise ratios.
Our filter method was tested with two different values for
k. Then, the filtered datasets together with the seed dataset
were used to train a classification model.
Our baseline methods for these experiments are
the random baseline and a method closely related to
the approach used by (Barz and Denzler, 2020). They
compute the Euclidean distance of L
2
-normalized
CNN features and use this distance metric in a graph-
ical interface to manually identify the duplicates. We
transform the distance metric to a fully automatic
single-value ranking very similar to the one we pro-
posed in Sect. 3.2. More specifically, the maxDot val-
ues from Eq. 3 are inversely related to the metric pro-
posed by (Barz and Denzler, 2020) and we use them
for this single-value ranking baseline. As Figure 4
shows, our duplicate detection approach consistently
outperforms the single-value ranking, since it addi-
tionally takes the SSIM values and several rankings
into account.
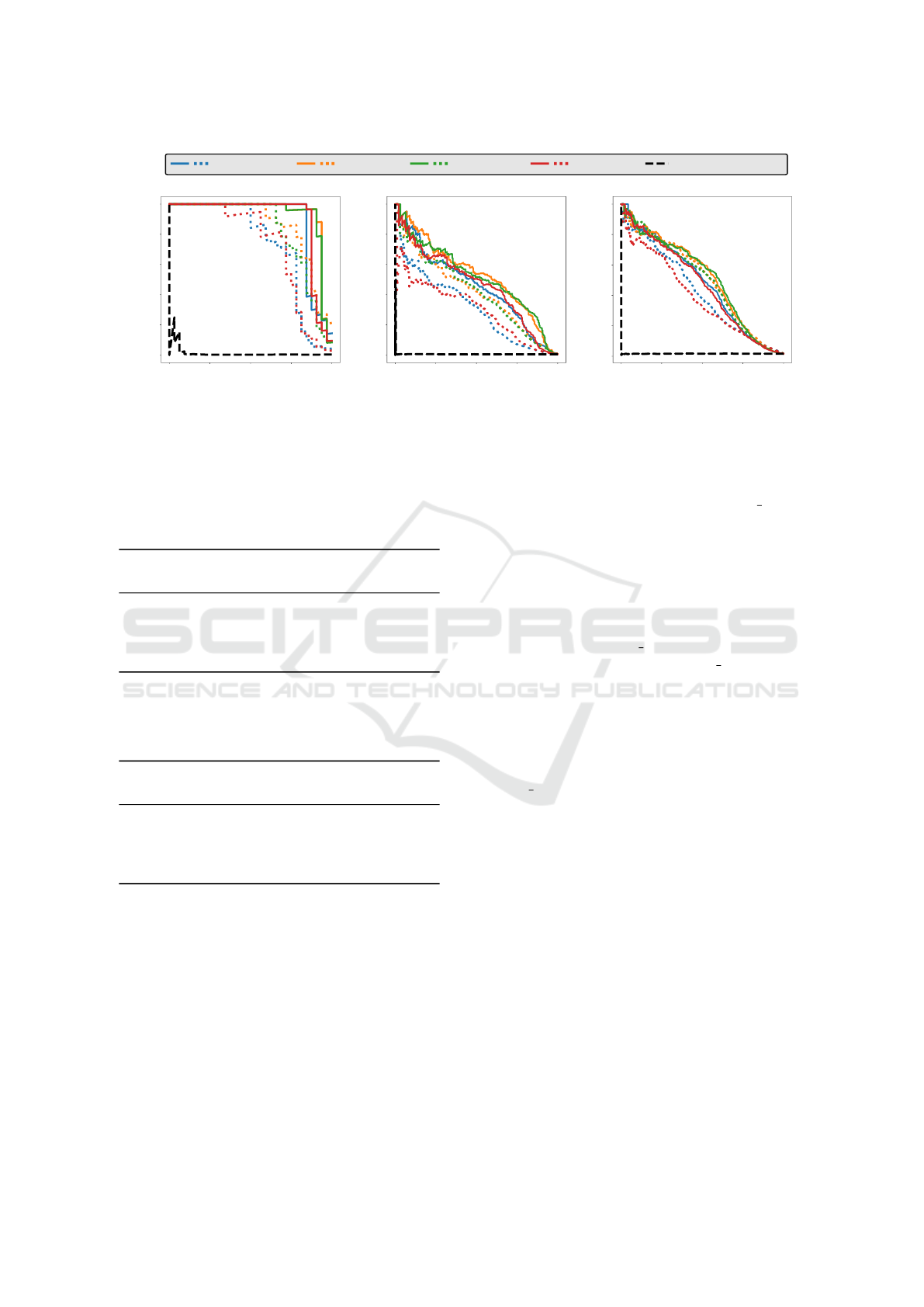
Furthermore, we performed the experiment with
CNN features of different architectures (ResNet50,
ResNet101 (He et al., 2016), InceptionV3 (Szegedy
et al., 2016), and Xception (Chollet, 2017)) pre-
trained on the ImageNet dataset. The improvement
of our approach can be seen across all these architec-
tures. Note that there are far fewer test duplicates in
the Web Costa Rica Moths dataset, which causes the
different shapes of the precision-recall curves com-
pared to the CIFAR datasets.
Table 1: Recall of the duplicate filter on the Costa Rica
Moths dataset. We found 32 test duplicates among 9,134
web images. In each cell we compare the baseline with our
proposed approach (baseline / our approach).
CNN
PORTION
0.02 0.05 0.1
INCEPTIONV3 0.84 / 0.97 0.88 / 1.00 1.00 / 1.00
RESNET50 0.94 / 0.97 1.00 / 1.00 1.00 / 1.00
RESNET101 0.97 / 1.00 1.00 / 1.00 1.00 / 1.00
XCEPTION 0.81 / 0.94 0.91 / 1.00 0.97 / 1.00
Table 1 provides recall rates for the Costa Rica
Moths dataset at different values for the parameter
portion, which specifies the percent of images re-
moved at the top of the rankings. Here, we compare
the single-value baseline with our approach. In test
duplicate filtering, recall, as the percentage of actual
test duplicates detected, is crucial when evaluating
different portion values. Since the aim is to maintain
the evaluation’s validity when using the web images
for training, we want to achieve high recall and give
less priority to the precision. With portion set to 0.02,
we found a reasonable balance between high recall
and good precision. Therefore, this value is used for
the experiments presented in the next section, where
the two moth datasets are augmented, and the down-
loaded images are filtered. In addition, Tables 2 and 3
contain recall rates for CIFAR-10 and CIFAR-100.
4.4 Training with Filtered Web Images
Finally, we evaluate the impact of all our methods on
the classification performance for the European and
Costa Rica Moths. We use the InceptionV3 (Szegedy
et al., 2016) architecture pre-trained on ImageNet.
Each setup is executed five times with 30 epochs for
each run, and we report the mean and the standard
deviation of the accuracies.
As baselines, we report the accuracies when train-
ing a CNN on the original seed datasets. Additionally,
for the Costa Rica Moths, we also report the results of
(Rodner et al., 2015) using CNN features and a linear
Lightweight Filtering of Noisy Web Data: Augmenting Fine-grained Datasets with Selected Internet Images
473
0.00 0.25 0.50 0.75 1.00
Recall
0.0
0.2
0.4
0.6
0.8
1.0
Precision
0.00 0.25 0.50 0.75 1.00
Recall
0.0
0.2
0.4
0.6
0.8
1.0
Precision
CIFAR-10
0.00 0.25 0.50 0.75 1.00
Recall
0.0
0.2
0.4
0.6
0.8
1.0
Precision
CIFAR-100
InceptionV3 ResNet50 ResNet101 Xception Random Baseline
Web Costa Rica Moths
Figure 4: Precision-recall-curves for Web Costa Rica Moths duplicates as well as for CIFAR-10 and CIFAR-100 duplicates
by varying the values of the parameter portion, which specifies the percentage of images from the augment set that are filtered
out, i.e., discarded at the top of the ranking. We evaluate four different CNN architectures and compare our approach (colored
solid lines) to the random baseline (black dashed line) and the single-value ranking (colored dotted lines).
Table 2: Recall of the duplicate filter on the CIFAR-10
dataset (286 test duplicates in 50,000 training images). In
each cell we compare the baseline with our proposed ap-
proach (baseline / our approach).
CNN
PORTION
0.02 0.05 0.1
INCEPTIONV3 0.62 / 0.78 0.74 / 0.85 0.82 / 0.93
RESNET50 0.74 / 0.85 0.85 / 0.92 0.91 / 0.94
RESNET101 0.75 / 0.85 0.85 / 0.91 0.92 / 0.94
XCEPTION 0.66 / 0.78 0.78 / 0.86 0.84 / 0.89
Table 3: Recall of the duplicate filter on the CIFAR-100
dataset (891 test duplicates in 50,000 training images). In
each cell we compare the baseline with our proposed ap-
proach (baseline / our approach).
CNN
PORTION
0.02 0.05 0.1
INCEPTIONV3 0.48 / 0.55 0.65 / 0.70 0.79 / 0.78
RESNET50 0.58 / 0.60 0.71 / 0.73 0.79 / 0.80
RESNET101 0.57 / 0.59 0.73 / 0.72 0.81 / 0.80
XCEPTION 0.45 / 0.59 0.65 / 0.69 0.77 / 0.78
SVM classifier. The last baseline is the classification
accuracy on the merged datasets (the combination of
the seed dataset and its corresponding unfiltered aug-
ment dataset). In the case of the Costa Rica Moths,
this merged dataset includes test duplicates and the
corresponding baseline is therefore not directly com-
parable to other baselines. Hence, we filter the test
duplicates (TD) with our method (Sect. 3.2) and the
parameter portion set to 0.02. The accuracy of the re-
sulting subset represents a more valid baseline. Some
example images are shown in Fig. 5.
For cross-class (CC) noise filtering, the final
portion was set using the parameter relative portion
as a percentage of the number of the exact du-
plicates to be filtered out additionally among the
near-duplicates. However, identifying or quantifying
cross-class noise requires costly expert knowledge.
Therefore, we do not have any reference for how
much cross-class noise can be expected when down-
loading images from the web, which would indicate a
suitable value for relative portion. Instead, we tested
three values for the parameter relative portion corre-
sponding to three hypotheses: (i) 0.1, assuming only
a few near-duplicates compared to exact duplicates,
(ii) 0.5, assuming half as many near-duplicates as ex-
act duplicates, and (iii) 1.0, assuming as many near-
duplicates as there are exact ones. We found that the
classifier trained on the augmented set filtered with
relative portion = 0.1 performed best. Example im-
ages for cross-class noise are shown in Fig. 6.
Cross-domain (CD) noise filtering was evaluated
with three values for the number of clusters k ∈
{5, 10, 50}. Qualitative results of this filter are shown
in Fig. 7. To estimate the effect of every single filter,
we evaluated different filter combinations.
Tables 4 and 5 show results for the Costa Rica
Moths and European Moths, respectively. The ta-
bles show that the augmentation of the training data
from the Internet results in considerable improve-
ments of the classifier (∼11 % for Costa Rica Moths
and ∼23 % for European Moths). Furthermore, we
observe that although our filters reduce the amount of
data by up to 58 %, the classification performances
remain stable. This indicates that our filtering meth-
ods remove training samples that do not contribute to
the correct classification. Finally, since the classifica-
tion performance remains the same even with noisy
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
474
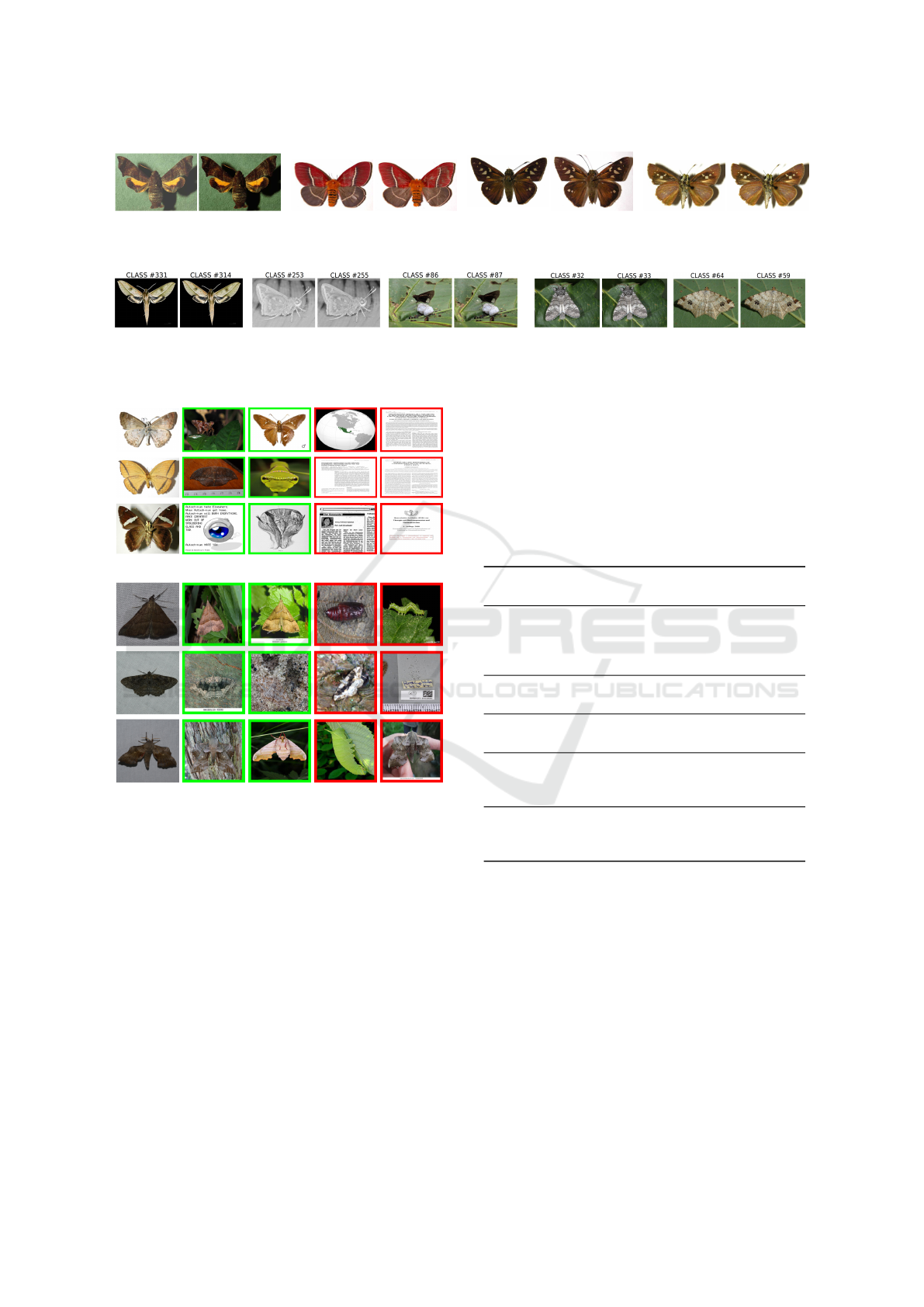
Figure 5: Some examples of detected test duplicates in the Web Costa Rica Moths dataset. Each pair contains an image from
the test set and a near-duplicate in the augmentation dataset.
(a) Costa Rica Moths (b) European Moths
Figure 6: Some examples of detected cross-class noise in the Costa Rica and European Moths datasets. Each pair contains a
reference image and its detected near-duplicate downloaded in another class.
(a) Costa Rica Moths
(b) European Moths
Figure 7: Detecting cross-domain noise in the augmented
moth datasets. In each row five images are displayed: a
training image from the seed dataset, two augment images
from positive clusters (green frames, retained), and two im-
ages from negative clusters (red frames, filtered out).
data, these results show that CNNs can handle a cer-
tain amount of noisy data. This insight confirms the
investigations of (Rolnick et al., 2017) in their work.
5 CONCLUSIONS
In this paper, we proposed a set of lightweight fil-
tering methods for different kinds of label noise that
occur when acquiring data from the Internet. We
presented a duplicate detection method that com-
bines features from a pre-trained CNN and a pixel-
Table 4: Results achieved for the Costa Rica Moths dataset.
The baseline of training on the seed dataset only is com-
pared to training with a merged training set (seed dataset
joined with the entire augment set) and to training with
those subsets of the merged dataset that our filter methods
retained. Test duplicate filtering (TD), cross-domain noise
filtering (CD) with different values for the number of clus-
ters k, and cross-class noise filtering (CC) have been applied
in different combinations (k = training dataset contains test
duplicates, bold = best mean accuracy).
METHOD ACCURACY ± STD
(# TRAINING IMAGES)
CNN features + SVM
79.20 % (990)
(Rodner et al., 2015)
Baseline InceptionV3
75.24 % ±0.76 (990)
(only seed data)
Merged, no filter k 86.17 % ±0.84 (10,124)
Merged + TD filter 86.11 % ±0.61 (9,941)
Merged + TD
86.06 % ±0.69 (7,736)
+ CC filter
Merged + TD k = 5 86.03 % ±0.70 (8,842)
+ CD filter k = 10 85.26 % ±0.53 (8,820)
k = 50 85.56 % ±0.92 (9,199)
Merged + TD k = 5 86.33 % ±0.65 (7,348)
+ CC + CD filter k = 10 86.73% ±1.34 (7,347)
k = 50 86.17 % ±0.65 (7,437)
based similarity measure (SSIM). With this method,
we removed test set duplicates, i.e., exact and near-
duplicates between the downloaded augmentation set
and the test set, and filtered cross-class noise by iden-
tifying ambiguous samples across the classes in the
augmentation set. Additionally, we used the CNN
features in combination with a clustering approach
for identifying cross-domain noise, a problem that has
poorly been studied so far.
We extensively evaluated the duplicate detection
approach on various datasets with existing duplicate
annotations. Furthermore, we proposed a technique to
generate datasets with cross-domain noise and an ar-
bitrary data-to-noise ratio due to the lack of datasets
Lightweight Filtering of Noisy Web Data: Augmenting Fine-grained Datasets with Selected Internet Images
475

Table 5: Results achieved for the European Moths dataset.
The baseline of training on the seed dataset only is com-
pared to training with a merged training set (seed dataset
joined with the entire augment set) and to training with
those subsets of the merged dataset that our filter methods
retained. Test duplicate filtering (TD), cross-domain noise
filtering (CD) with different values for the number of clus-
ters k, and cross-class noise filtering (CC) have been applied
in different combinations (bold = best mean accuracy).
METHOD ACCURACY ± STD
(# TRAINING IMAGES)
Baseline InceptionV3
72.75 % ±1.46 (300)
(only seed data)
Merged, no filter 95.43 % ±0.57 (9,691)
Merged + CC filter 95.93% ±0.45 (9,424)
Merged k = 5 95.02 % ±0.47 (4,162)
+ CD filter k = 10 95.62 % ±0.45 (6,458)
k = 50 95.75 % ±0.34 (6,938)
Merged + CC k = 5 95.53 % ±0.22 (4,069)
+ CD filter k = 10 95.65 % ±0.74 (6,276)
k = 50 95.65 % ±0.18 (6,776)
with annotated cross-domain noise. We used these
datasets to validate our cross-domain noise filter. In
all these cases, we were able to demonstrate the ef-
fectiveness of our proposed methods.
Finally, we applied all our filtering methods for
the moth species classification problem testing two
different seed datasets. The downloaded images im-
proved the classification accuracies. Furthermore,
even though the filters reduce the amount of the train-
ing data by up to 58 %, the classification performance
is not affected significantly compared to the utiliza-
tion of all downloaded images. This indicates that the
eliminated samples did not contribute to the classi-
fier’s decisions and were correctly filtered out.
The focus of this work was to develop and eval-
uate the filtering methods. Hence, we used a simple
global classification approach. We assume that the de-
ployment of a part- or attention-based method would
also benefit from the label noise reduction offered by
our filtering methods.
REFERENCES
Akcay, S., Atapour-Abarghouei, A., and Breckon, T. P.
(2018). Ganomaly: Semi-supervised anomaly detec-
tion via adversarial training. In Asian conference on
computer vision, pages 622–637. Springer.
Barz, B. and Denzler, J. (2020). Do we train on test data?
purging cifar of near-duplicates. Journal of Imaging,
6(6):41.
Berg, T. L. and Forsyth, D. A. (2006). Animals on the web.
In IEEE Conference on Computer Vision and Pattern
Recognition, volume 2, pages 1463–1470.
Chen, X., Shrivastava, A., and Gupta, A. (2013). Neil: Ex-
tracting visual knowledge from web data. In IEEE
International Conference on Computer Vision, pages
1409–1416.
Chollet, F. (2017). Xception: Deep learning with depthwise
separable convolutions. In IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 1251–
1258.
Cortes, C. and Vapnik, V. (1995). Support-vector networks.
Machine Learning, 20(3):273–297.
Cui, Y., Song, Y., Sun, C., Howard, A., and Belongie, S.
(2018). Large scale fine-grained categorization and
domain-specific transfer learning. In IEEE Confer-
ence on Computer Vision and Pattern Recognition,
pages 4109–4118.
Eskin, E. (2000). Detecting errors within a corpus using
anomaly detection. In 1st Meeting of the North Amer-
ican Chapter of the Association for Computational
Linguistics.
Fefilatyev, S., Shreve, M., Kramer, K., Hall, L., Goldgof,
D., Kasturi, R., Daly, K., Remsen, A., and Bunke, H.
(2012). Label-noise reduction with support vector ma-
chines. In 21st International Conference on Pattern
Recognition, pages 3504–3508.
Fr
´
enay, B. and Verleysen, M. (2013). Classification in
the presence of label noise: a survey. IEEE Trans-
actions on Neural Networks and Learning Systems,
25(5):845–869.
Garcia, L. P., Lorena, A. C., Matwin, S., and de Carvalho,
A. C. (2016). Ensembles of label noise filters: a rank-
ing approach. Data Mining and Knowledge Discov-
ery, 30(5):1192–1216.
Ge, W., Lin, X., and Yu, Y. (2019). Weakly supervised
complementary parts models for fine-grained image
classification from the bottom up. In IEEE Conference
on Computer Vision and Pattern Recognition, pages
3034–3043.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep
residual learning for image recognition. In IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 770–778.
Ke, Y., Sukthankar, R., Huston, L., Ke, Y., and Suk-
thankar, R. (2004). Efficient near-duplicate detection
and sub-image retrieval. In ACM Multimedia, vol-
ume 4, page 5.
Korsch, D., Bodesheim, P., and Denzler, J. (2019).
Classification-specific parts for improving fine-
grained visual categorization. In German Conference
on Pattern Recognition, pages 62–75.
Krause, J., Sapp, B., Howard, A., Zhou, H., Toshev, A.,
Duerig, T., Philbin, J., and Fei-Fei, L. (2016). The un-
reasonable effectiveness of noisy data for fine-grained
recognition. In European Conference on Computer
Vision, pages 301–320.
Krizhevsky, A. (2009). Learning multiple layers of fea-
tures from tiny images. Technical report, University
of Toronto.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
476

Li, L.-J. and Fei-Fei, L. (2010). Optimol: automatic on-
line picture collection via incremental model learning.
International Journal of Computer Vision, 88(2):147–
168.
Lin, T.-Y., RoyChowdhury, A., and Maji, S. (2015). Bilin-
ear cnn models for fine-grained visual recognition. In
IEEE International Conference on Computer Vision,
pages 1449–1457.
Luo, J. and Nascimento, M. A. (2003). Content based
sub-image retrieval via hierarchical tree matching.
In 1st ACM International Workshop on Multimedia
Databases, pages 63–69.
Nicholson, B., Zhang, J., Sheng, V. S., and Wang, Z. (2015).
Label noise correction methods. In IEEE Interna-
tional Conference on Data Science and Advanced An-
alytics, pages 1–9.
Ravi, S. and Larochelle, H. (2016). Optimization as a model
for few-shot learning.
Rodner, E., Simon, M., Brehm, G., Pietsch, S., W
¨
agele,
J. W., and Denzler, J. (2015). Fine-grained recognition
datasets for biodiversity analysis. In CVPR Workshop
on Fine-grained Visual Classification.
Rolnick, D., Veit, A., Belongie, S., and Shavit, N. (2017).
Deep learning is robust to massive label noise. arXiv
preprint arXiv:1705.10694.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M., Berg, A. C., and Fei-Fei, L. (2015). Ima-
geNet Large Scale Visual Recognition Challenge. In-
ternational Journal of Computer Vision, 115(3):211–
252.
Schroff, F., Criminisi, A., and Zisserman, A. (2010). Har-
vesting image databases from the web. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
33(4):754–766.
Simon, M., Gao, Y., Darrell, T., Denzler, J., and Rodner, E.
(2017). Generalized orderless pooling performs im-
plicit salient matching. In IEEE International Confer-
ence on Computer Vision, pages 4970–4979.
Snell, J., Swersky, K., and Zemel, R. (2017). Prototypical
networks for few-shot learning. In Advances in neural
information processing systems, pages 4077–4087.
Sung, F., Yang, Y., Zhang, L., Xiang, T., Torr, P. H., and
Hospedales, T. M. (2018). Learning to compare: Re-
lation network for few-shot learning. In Proceedings
of the IEEE Conference on Computer Vision and Pat-
tern Recognition, pages 1199–1208.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wojna,
Z. (2016). Rethinking the inception architecture for
computer vision. In IEEE Conference on Computer
Vision and Pattern Recognition, pages 2818–2826.
Van Horn, G., Mac Aodha, O., Song, Y., Cui, Y., Sun,
C., Shepard, A., Adam, H., Perona, P., and Belongie,
S. (2018). The inaturalist species classification and
detection dataset. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 8769–8778.
Wah, C., Branson, S., Welinder, P., Perona, P., and Be-
longie, S. (2011). The caltech-ucsd birds-200-2011
dataset. Technical Report CNS-TR-2011-001, Cali-
fornia Institute of Technology.
Wang, B., Li, Z., Li, M., and Ma, W.-Y. (2006). Large-scale
duplicate detection for web image search. In IEEE
International Conference on Multimedia and Expo,
pages 353–356.
Wang, J., Song, Y., Leung, T., Rosenberg, C., Wang, J.,
Philbin, J., Chen, B., and Wu, Y. (2014). Learn-
ing fine-grained image similarity with deep ranking.
In IEEE Conference on Computer Vision and Pattern
Recognition, pages 1386–1393.
Wang, Z., Bovik, A. C., Sheikh, H. R., and Simoncelli, E. P.
(2004). Image quality assessment: from error visi-
bility to structural similarity. IEEE Transactions on
Image Processing, 13(4):600–612.
Xiao, T., Xia, T., Yang, Y., Huang, C., and Wang, X. (2015).
Learning from massive noisy labeled data for image
classification. In IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 2691–2699.
Xu, Z., Huang, S., Zhang, Y., and Tao, D. (2015). Augment-
ing strong supervision using web data for fine-grained
categorization. In IEEE International Conference on
Computer Vision.
Zhang, C., Yao, Y., Zhang, J., Chen, J., Huang, P., Zhang,
J., and Tang, Z. (2020). Web-supervised network for
fine-grained visual classification. In IEEE Interna-
tional Conference on Multimedia and Expo, pages 1–
6.
Zhang, W. and Tan, X. (2019). Combining outlier detection
and reconstruction error minimization for label noise
reduction. In IEEE International Conference on Big
Data and Smart Computing, pages 1–4.
Zheng, H., Fu, J., Mei, T., and Luo, J. (2017). Learn-
ing multi-attention convolutional neural network for
fine-grained image recognition. In IEEE International
Conference on Computer Vision, pages 5209–5217.
Zhuang, B., Liu, L., Li, Y., Shen, C., and Reid, I. (2017).
Attend in groups: a weakly-supervised deep learning
framework for learning from web data. In IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 1878–1887.
Lightweight Filtering of Noisy Web Data: Augmenting Fine-grained Datasets with Selected Internet Images
477
