
Road Lane Detection and Classification in Urban and Suburban Areas
based on CNNs
Nima Khairdoost, Steven S. Beauchemin and Michael A. Bauer
Department of Computer Science, The University of Western Ontario,
London, ON, N6A-5B7, Canada
Keywords:
Lane Detection, Lane Type Classification, CNN.
Abstract:
Road lane detection systems play a crucial role in the context of Advanced Driver Assistance Systems
(ADASs) and autonomous driving. Such systems can lessen road accidents and increase driving safety by
alerting the driver in risky traffic situations. Additionally, the detection of ego lanes with their left and right
boundaries along with the recognition of their types is of great importance as they provide contextual infor-
mation. Lane detection is a challenging problem since road conditions and illumination vary while driving. In
this contribution, we investigate the use of a CNN-based regression method for detecting ego lane boundaries.
After the lane detection stage, following a projective transformation, the classification stage is performed with
a RseNet101 network to verify the detected lanes or a possible road boundary. We applied our framework
to real images collected during drives in an urban area with the RoadLAB instrumented vehicle. Our exper-
imental results show that our approach achieved promising results in the detection stage with an accuracy of
94.52% in the lane classification stage.
1 INTRODUCTION
Nowadays, almost every new vehicle features
some type of Advanced Driving Assistance System
(ADAS), ranging from adaptive cruise control, blind-
spot detection, collision avoidance, traffic sign de-
tection, overtaking assistance, to parking assistance.
ADASs generally increase safety and reduce driver
workload. Lane detection constitutes one of the fun-
damental functions found in autonomous driving sys-
tems and ADASs. Lane boundaries provide the infor-
mation required for estimating the lateral position of
a vehicle on the road, enabling systems such as lane
departure warning, overtaking assistance, intelligent
cruise control, and trajectory planning.
Lane detection approaches are categorized into
two groups: classical and deep learning methods. The
traditional lane detection methods usually employ a
number of computer vision and image processing
techniques to extract specialized features and to iden-
tify the location of lane segments. Subsequently, post-
processing techniques remove false detections and
join sub-segments to obtain final road lane positions.
In general, these traditional approaches suffer from
performance issues when they encounter challenging
illumination conditions and complex road scenes.
Recently, deep learning-based methods have been
employed to provide reliable solutions to the lane de-
tection problem. Methods based on CNNs fall into
two categories, namely segmentation-based methods
and Generative Adversarial Network based methods
(GAN) (Yoo et al., 2020). (Chougule et al., 2018)
proposed a regression-coordinate network based on
CNN for lane detection in highway driving scenes in
an end-to-end fashion. In this study, we followed their
lane detection strategy in environments where there
exists a greater variety of lane types as opposed to
highways. We classify various types of lanes as they
indicate traffic rules relevant for driving. Following
the detection stage, we use a two-step algorithm to
classify the lane boundaries into eight classes, consid-
ering road boundaries (no markings) as one particular
type of lane.
The rest of this contribution is organized as fol-
lows: In Section 2, we review the related literature.
Section 3 provides a summary of the datasets and the
lane model. Results and evaluations are given in Sec-
tion 4. Finally, we summarize our results in Section
5.
450
Khairdoost, N., Beauchemin, S. and Bauer, M.
Road Lane Detection and Classification in Urban and Suburban Areas based on CNNs.
DOI: 10.5220/0010241004500457
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
450-457
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 LITERATURE SURVEY
In this Section, we survey both traditional and Deep
Learning methods for lane marking recognition and
classification.
2.1 Traditional Approaches
Most traditional methods extract a combination of
visual highly-specialized features using various ele-
ments such as color (Chiu and Lin, 2005), (Cheng
et al., 2006), edges (Lee and Moon, 2018), ridge
features (L
´
opez et al., 2010), and template match-
ing (Choi and Oh, 2010). These primitive features
can also be combined by way of Hough transforms
(Liu et al., 2010), Kalman filters (Mammeri et al.,
2014), (Kim, 2008), and particle filters (Linarth and
Angelopoulou, 2011). Most of these methods are sen-
sitive to illumination changes and road conditions and
thus prone to fail.
2.2 Deep Learning-based Approaches
There are mainly two groups of segmentation meth-
ods for lane marker detection: 1) Semantic Segmenta-
tion and 2) Instance Segmentation. In the first group,
each pixel is classified by a binary label indicating
whether it belongs to a lane or not. For instance, in
(He et al., 2016), the authors presented a CNN-based
framework that utilizes front-view and top-view im-
age regions to detect lanes. Following this, they used
a global optimization step to reach a combination of
accurate lane lines. (Lee et al., 2017) proposed a Van-
ishing Point Guided Net (VPGNet) model that simul-
taneously performs lane detection and road marking
recognition under different weather conditions. Their
data was captured in a downtown area of Seoul, South
Korea.
Conversely, Instance Segmentation approaches
differentiate individual instances of each class in an
image and identify separate parts of a line as one unit.
(Pan et al., 2018) proposed the Spatial CNN (SCNN)
to achieve effective information propagation in the
spatial domain. This CNN-analogous scheme effec-
tively retains the continuity of long and thin shapes
such as road lanes, while its diffusion effects enable
it to segment large objects. LaneNet (Neven et al.,
2018) is a branched, instance segmentation architec-
ture that produces a binary lane segmentation mask
and pixel embeddings. These are used to cluster lane
points. Subsequently, another neural network called
H-net with a custom loss function is employed to pa-
rameterize lane instances before the lane fitting.
GANs have been used for lane detection. (Liu
et al., 2020) presented a style-transfer-based data en-
hancement approach, which used GANs (Goodfellow
et al., 2014) to create images in low-light conditions
that raise the environmental adaptability of the model.
Their method does not require additional annotation
nor extraneous inference overhead. (Ghafoorian et al.,
2018) proposed an Embedding Loss GAN (EL-GAN)
framework for lane boundary segmentation. The dis-
criminator receives the source data, a prediction map,
and a ground truth label as inputs and is trained to
minimize the difference between the training labels
and embeddings of the predictions. In (Kim et al.,
2020), a data augmentation method with GAN was
proposed for oversampling minority anomalies in lane
detection. The GAN network is employed to address
the imbalance problem by synthesizing the anoma-
lous data. It learns the distribution of the falsely de-
tected lane by itself, without domain knowledge.
2.3 Approaches for Lane Type
Classification
Different types of lane markings exist. Generally, a
lane marking is categorized by its color, with dashed
or solid, and single or double segments. In (Hoang
et al., 2016), a method is presented for road lane de-
tection that discriminates dashed and solid lane mark-
ings. Their method outperformed conventional lane
detection methods. Several other approaches such as
(Sani et al., 2018), (de Paula and Jung, 2013), and
(Ali and Hussein, 2019), recognize five lane mark-
ing types including Dashed, Dashed-Solid, Double
Solid, Solid-Dashed, and Single Solid. In (Sani et al.,
2018), a method that utilizes a two-layer classifier
was proposed to classify these lane markings using
a customized Region of Interest (ROI) and two de-
rived features, namely; the contour number, and the
contour angle. In (de Paula and Jung, 2013), the au-
thors presented a method to detect lane markers based
on a linear parabolic model and geometric constraints.
To classify lane markers into the aforementioned five
classes, a three-level cascaded classifier consisting of
four binary classifiers was developed. In (Ali and
Hussein, 2019), the ROI is divided into two subre-
gions. To identify the lane types, a method based on
the Seed Fill algorithm is applied to the location of
the lanes. (Lo et al., 2019b) proposed two techniques,
Feature Size Selection and Degressive Dilation Block
to extend an existing semantic segmentation network
called EDANet (Lo et al., 2019a) to discriminate the
road from four types of lanes, including double solid
yellow, single dashed yellow, single solid red, and sin-
gle solid white.
Road Lane Detection and Classification in Urban and Suburban Areas based on CNNs
451
3 PROPOSED METHOD
In this Section, we present our approaches to the
problem of lane marking recognition and classifica-
tion, with their respective datasets extracted from the
RoadLAB experiments.
3.1 Lane Detection Stage
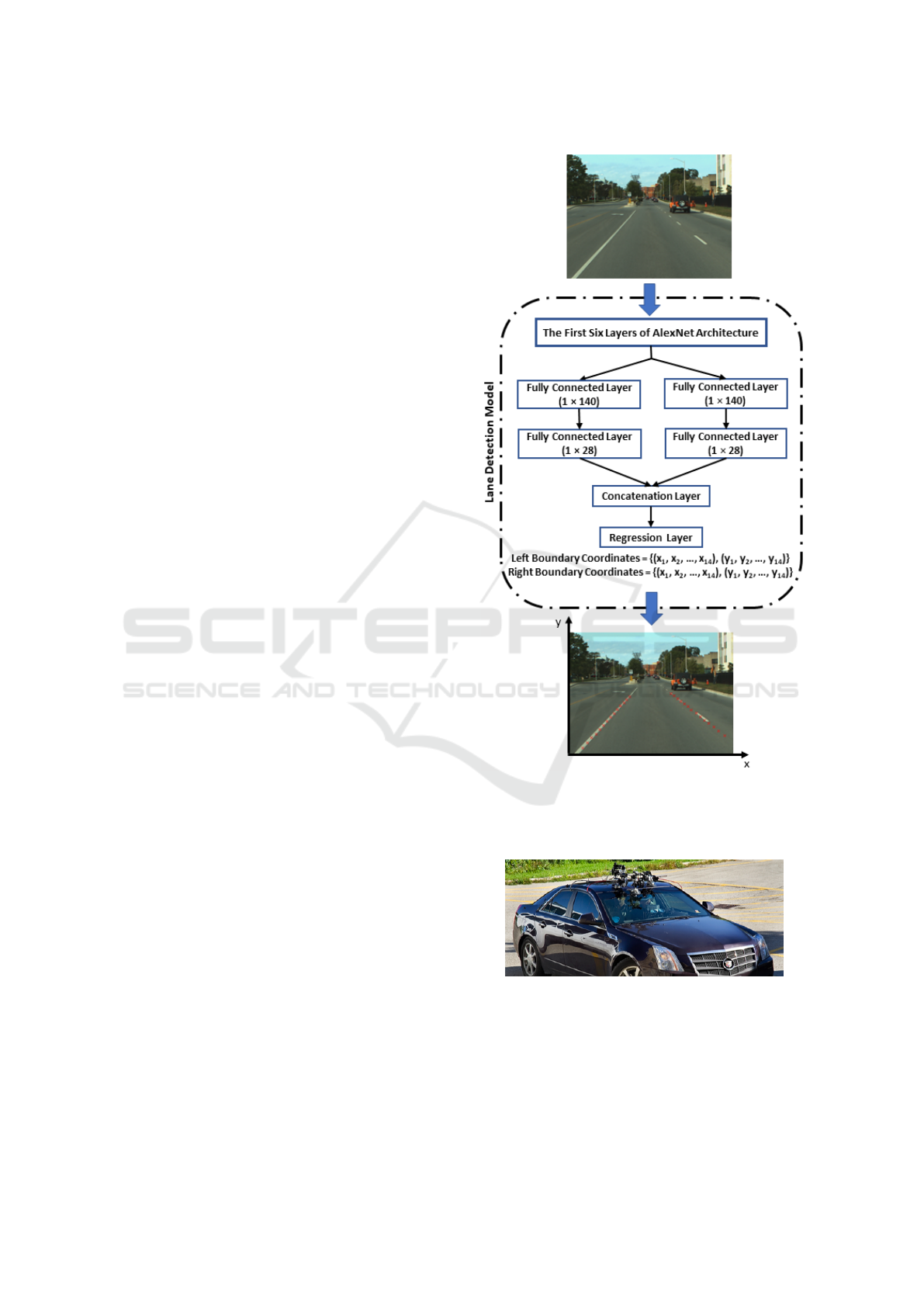
3.1.1 Regression-based Lane Detection Model
To identify the ego lane boundaries in the road im-
age, a regression-based network is utilized that out-
puts two vectors representing the coordinate points of
the left and right boundaries from the ego lane. Each
coordinate vector consists of 14 coordinates (x, y) on
the image plane indicating sampled positions for the
ego lane boundary. To construct this model, a pre-
trained AlexNet architecture is utilized. First, the last
two fully connected layers are removed from the net-
work and then four-level cascaded layers are added to
the first six layers of AlexNet to complete the lane
detection model. These four-level cascaded layers
contain two branches of two back-to-back fully con-
nected layers, a concatenation layer and a regression
layer, as shown in Figure 1. This branched architec-
ture minimizes misclassifications of the detected lane
points (Chougule et al., 2018). Moreover, this archi-
tecture is capable of detecting the road boundary as an
assumptive ego lane left/right boundary when there is
no actual lane marking.
3.1.2 Our Dataset for Lane Detection
In this Section, we introduce our lane detection
dataset extracted from the driving sequences, cap-
tured with the RoadLAB instrumented vehicle (Beau-
chemin et al., 2012), (see Figure 2). Our experimental
vehicle was used to collect driving sequences from 16
drivers on a pre-determined 28.5km route within the
city of London Ontario, Canada. (see Figure 3). Data
frames were collected at a rate of 30Hz with a reso-
lution of 320 × 240. We used 12 driving sequences,
as described in Table 1, to derive our dataset contain-
ing 5782 images along with their corresponding lane
annotations. Figure 4 illustrates examples from our
derived dataset.
An essential element of any deep learning-based
system is the availability of large numbers of sam-
ple images. Data augmentation is a commonly used
strategy to significantly expand an existing dataset by
generating unique samples through transformations of
images in the dataset. The exploitation of data aug-
mentation strategy reduces overfitting from the net-
work. We employed data augmentation techniques to
Figure 1: The lane detection model provides two lane vec-
tors, each consisting of 14 coordinates in the image plane
that represent the predicted left and right boundaries of the
ego lane.
Figure 2: Forward stereoscopic vision system mounted on
rooftop of the RoadLAB experimental vehicle.
enrich the dataset, resulting in an improved perfor-
mance at the lane detection stage.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
452
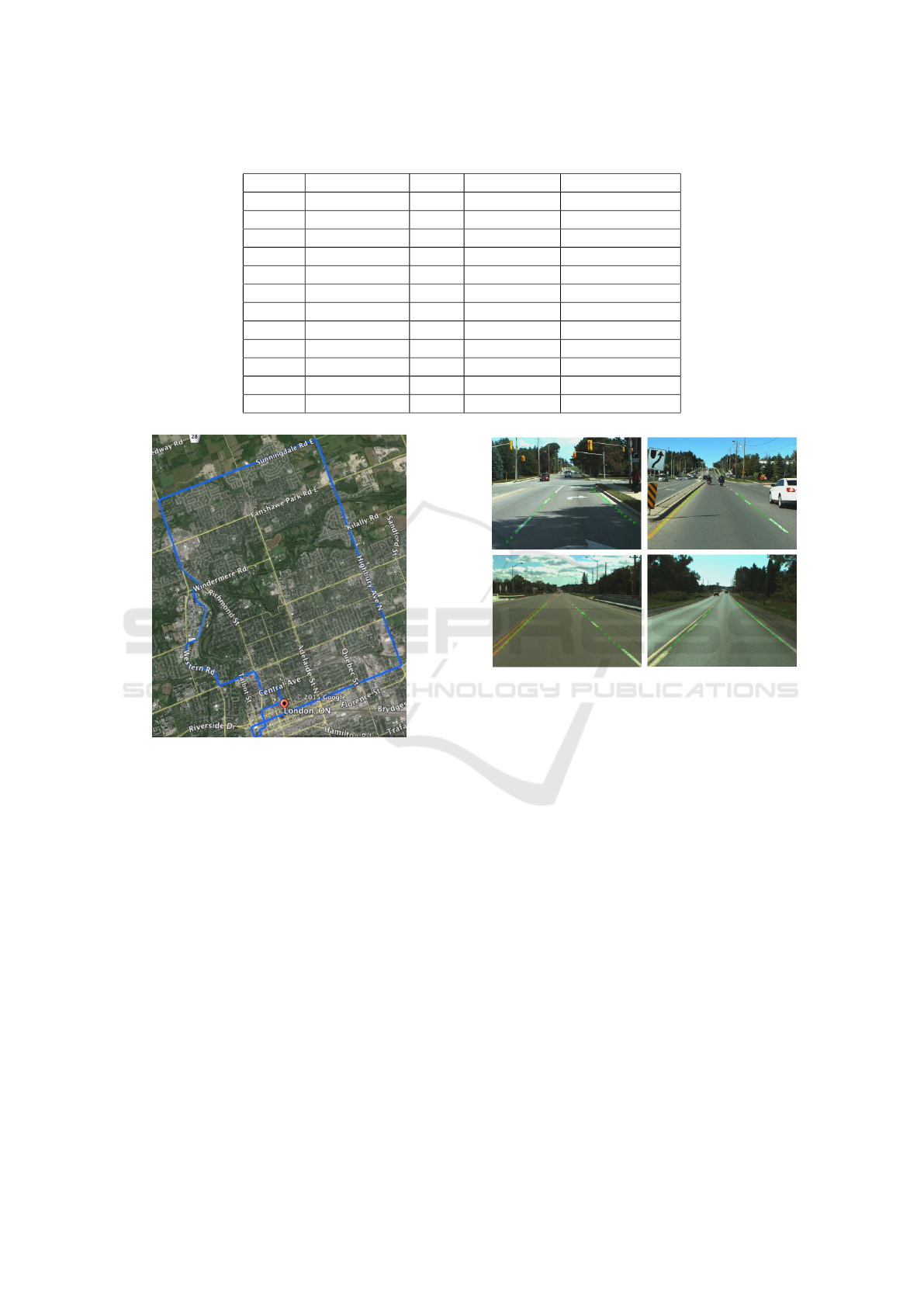
Table 1: Summary of driving conditions of our data (Each row belongs to one driver).
Seq. # Capture Date Time Temperature Weather
2 2012-08-24 15:30 31
◦
C Sunny
4 2012-08-31 11:00 24
◦
C Sunny
5 2012-09-05 12:05 27
◦
C Partially Cloudy
8 2012-09-12 14:45 27
◦
C Sunny
9 2012-09-17 13:00 24
◦
C Partially Cloudy
10 2012-09-19 09:30 8
◦
C Sunny
11 2012-09-19 14:45 12
◦
C Sunny
12 2012-09-21 11:45 18
◦
C Partially Sunny
13 2012-09-21 14:45 19
◦
C Partially Sunny
14 2012-09-24 11:00 7
◦
C Sunny
15 2012-09-24 14:00 13
◦
C Partially Sunny
16 2012-09-28 10:00 14
◦
C Partially Sunny
Figure 3: Map of the predetermined course for drivers, lo-
cated in London, Ontario, Canada. The path includes urban
and suburban driving areas and is approximately 28.5 kilo-
meters long.
3.2 Lane Type Classification Stage
Lane type information is of great importance in guid-
ing drivers to safely decide either to keep course in
the ego lane, to change lane, to overtake, or to turn
around. Our goal is to classify the detected ego lane
boundaries into eight classes including dashed white,
dashed yellow, solid white, solid yellow, double solid
yellow, dashed-solid yellow, solid-dashed yellow, and
road boundary. The road boundary type specifies the
edge of the road when an actual lane marking does
not exist.
Figure 4: Examples of annotated samples of our lane detec-
tion dataset.
3.2.1 ResNet101-based Lane Type Classification
Model
The lane type classification stage receives the output
of lane detection (14 coordinates in the image plane
for each predicted ego lane boundary) as input. We
first identify the ROI for each lane boundary sepa-
rately. Each ROI fits the detected ego lane boundary
as per its corresponding predicted coordinates. Next,
we apply a projective transformation to each ROI to
obtain an image where the lane marking align in the
center of the resulting image. Afterwards, we crop the
middle rectangular part of the transformed image that
contains the lane type information. Finally, we apply
our trained ResNet101 network to classify the result-
ing images obtained for each lane boundary into the
aforementioned eight classes. Figure 5 illustrates how
the lane type classification stage performs the above
steps on a sample road image.
Road Lane Detection and Classification in Urban and Suburban Areas based on CNNs
453
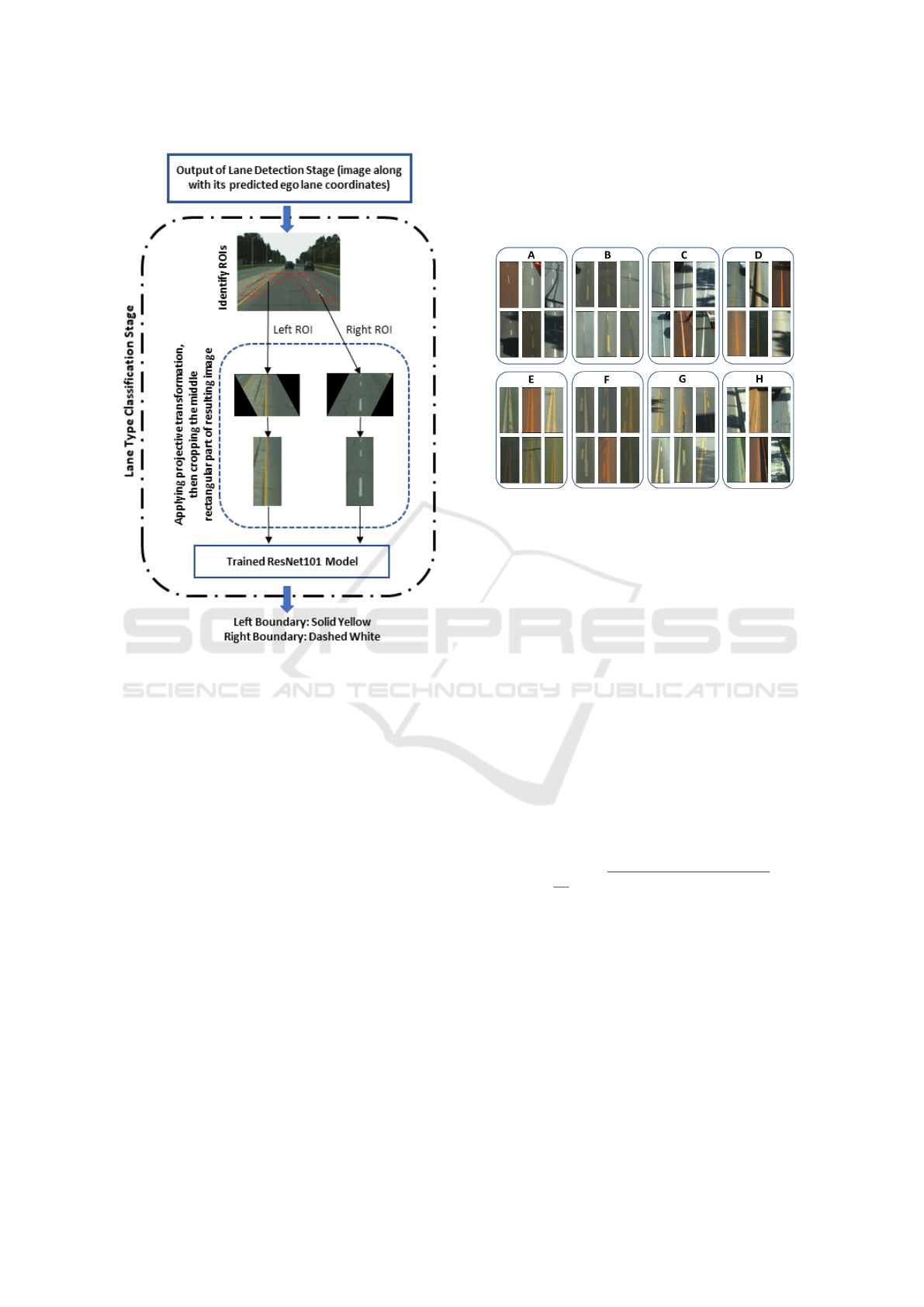
Figure 5: Visualization of the lane type classification stages,
from road images to ego lane boundaries.
3.2.2 Our Dataset for Lane Boundary Types
In order to train and test our lane type classification
model, we collected 10571 sample lane boundary im-
ages from the outputs of the lane detection model.
These samples are inputs to our ResNet101 model,
as they contain the lane type information. Figure 6
shows samples of our dataset for the eight lane bound-
ary types.
To further enrich our lane type dataset for train-
ing, we employed two different techniques including
data augmentation and a boosting method. By means
of data augmentation, we expanded our dataset by
creating the translated, rotated, sheared, and scaled
versions of our original samples. Table 2 repre-
sents the techniques we have used to augment our
data with their descriptions and ranges. To boost the
performance of our trained model, we used an ad-
vanced learning method called Hard Examples Min-
ing (HEM). HEM refers to the examples that have
been misclassified by the current trained version of
the model. We trained the ResNet101 model in an it-
erated procedure, and at each iteration, the model was
applied to a number of new samples from the training
data. We then added the corrections of misclassified
outputs to the training set for the next iteration. Fi-
nally, the model is provided with more key samples
to increase its robustness.
Figure 6: Lane boundary samples of our train-and-test data
a) Dashed White, b) Dashed Yellow, c) Solid White, d)
Solid Yellow, e) Double Solid Yellow f) Dashed-Solid Yel-
low, g) Solid-Dashed Yellow, h) Road Boundary.
4 EXPERIMENTAL RESULTS
To perform the experiments, we applied the model to
the unseen test data extracted from our driving se-
quences (Beauchemin et al., 2012). To evaluate the
performance of the lane detection stage, we used a
metric suggested by (Chougule et al., 2018): we com-
pute the mean error between the predicted lane coor-
dinates generated by the lane coordinate model with
the corresponding ground truth values as a Euclidean
distance (in terms of pixels), for each lane boundary.
For each single lane boundary, the Mean Prediction
Error (MPE) is computed as follows (see Figure 7):
MPE =
1
14
14
∑
i=1
q
(xp
i
− xg
i
)
2
+ (yp
i
− yg
i
)
2
(1)
where (xp
i
, yp
i
) and (xg
i
, yg
i
) indicate the predicted
lane coordinates and the corresponding ground truth
coordinates respectively. Additionally, we investi-
gated the performance of the following two L
1
and
L
2
loss functions at the lane detection stage:
L
1
=
14
∑
i=1
|xp
i
− xg
i
| +
14
∑
i=1
|yp
i
− yg
i
| (2)
L
2
=
14
∑
i=1
(xp
i
− xg
i
)
2
+
14
∑
i=1
(yp
i
− yg
i
)
2
(3)
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
454
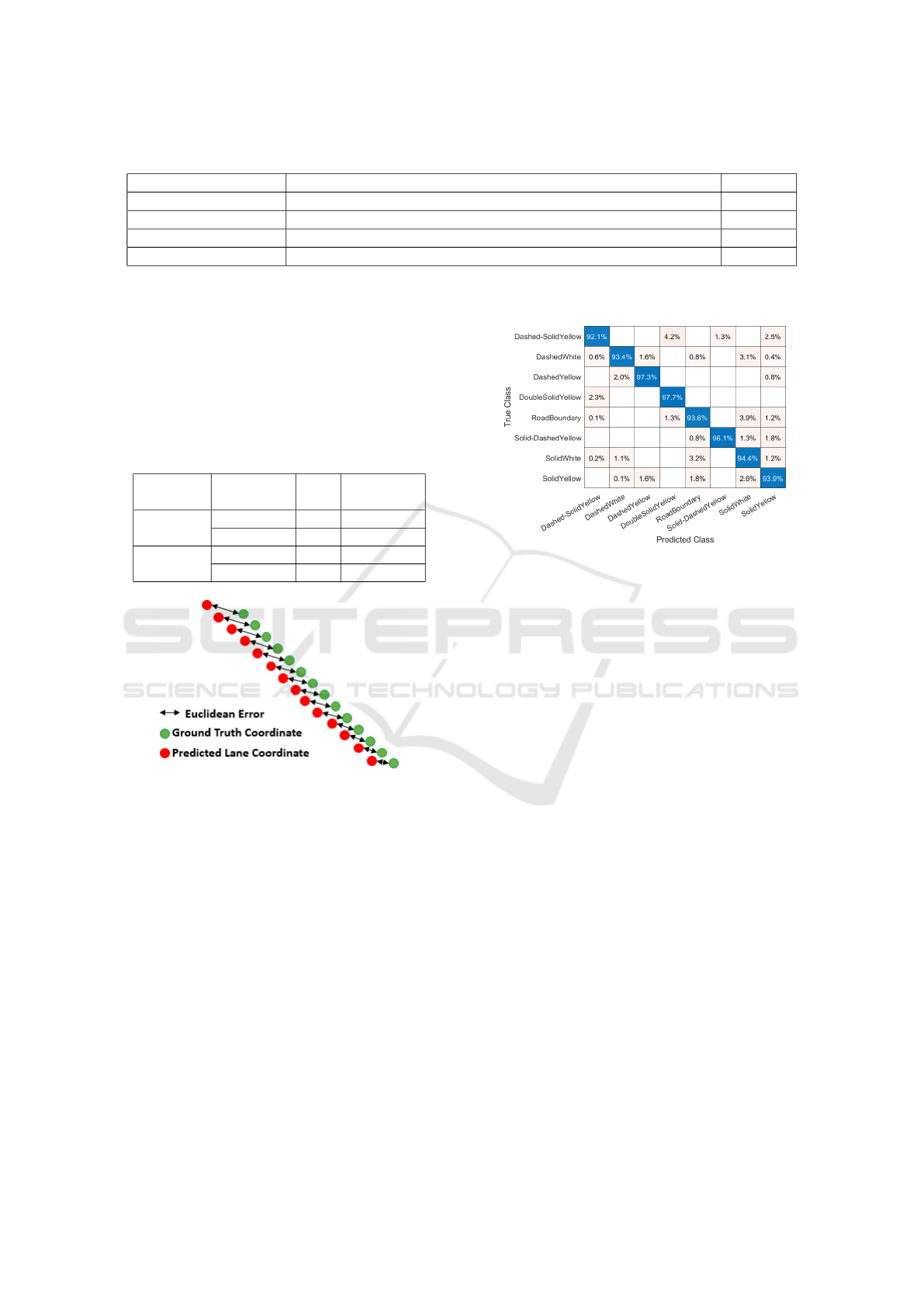
Table 2: Description of data augmentation.
Augmentation Method Description Range
Translate Each image is translated in the h/v direction by a distance, in pixels [-20, 20]
Rotate Each image is rotated by an angle, in degrees [-25, 25]
Shear Each image is sheared along the h/v axis by an angle, in degrees [-25, 25]
Scale Each image is zoomed in/out in the h/v direction by a factor [0.5, 1.5]
where (xp
i
, yp
i
) and (xg
i
, yg
i
) indicate the predicted
lane coordinates and the corresponding ground truth
coordinates respectively.
In Table 3, we report the performance of the lane
detection stage described in Section 3.1 for the ego
lane left/right boundaries using the aforementioned
loss functions. As observed from Table 3, the L
1
loss
function is superior to L
2
.
Table 3: Description of our lane detection results based on
the prediction error.
Loss
Function
Ago Lane
Boundary
MPE Standard
Deviation
L
1
Left 5.96 4.70
Right 5.79 4.85
L
2
Left 7.39 5.55
Right 7.16 5.42
Figure 7: Visualization of the Euclidean error between the
predicted lane coordinates and the corresponding ground
truth coordinates.
As described in Section 3.2, the lane type classifi-
cation stage is applied to the output of the lane detec-
tion stage to recognize the detected lane boundaries
and to provide a classification result. We trained a
ResNet101 CNN using our dataset to verify and cate-
gorize the localized lane boundaries into eight classes
of lane types. To verify the accuracy of the lane type
classification stage, we computed the confusion ma-
trix from the ResNet101 model on the test data (See
Figure 8). The results show that the model reaches
94.52% of overall correct classification. This model
is able to discriminate the eight lane types with less
than 4.2% of mislabeling error. The lowest degree of
correctly categorized classes belongs to class dashed-
solid yellow, while class double solid yellow obtained
97.7%. Figure 9 displays small portions of the visual
outputs from our system for the eight classes of lane
boundary types.
Figure 8: Confusion matrix from ResNet101 for lane type
classification.
5 CONCLUSIONS
In this study, we presented a CNN-based framework
to detect and classify lane types in urban and sub-
urban driving environments. To perform lane detec-
tion and classification stages, we created an image
dataset for each from sequences captured in different
illumination conditions created by the RoadLAB ini-
tiative (Beauchemin et al., 2012). We also enriched
our training data using data augmentation and a hard
example mining strategy. To detect lanes, we used
a network which generates lane information in terms
of image coordinates in an end-to-end way. In the
lane type classification stage, we utilized our trained
ResNet101 network to categorize the detected lane
boundaries into eight classes including dashed white,
dashed yellow, solid white, solid yellow, double solid
yellow, dashed-solid yellow, solid-dashed yellow, and
road boundary. Finally, our results showed that the
ResNet101 model achieved over 94% of correct lane
type classifications.
Road Lane Detection and Classification in Urban and Suburban Areas based on CNNs
455

Figure 9: Output samples of our experiments on the RoadLAB dataset.
REFERENCES
Ali, A. A. and Hussein, H. A. (2019). Real-time lane mark-
ings recognition based on seed-fill algorithm. In Pro-
ceedings of the International Conference on Informa-
tion and Communication Technology, pages 190–195.
Beauchemin, S., Bauer, M., Kowsari, T., and Cho, J. (2012).
Portable and scalable vision-based vehicular instru-
mentation for the analysis of driver intentionality.
IEEE Transactions on Instrumentation and Measure-
ment, 61(2):391–401.
Cheng, H.-Y., Jeng, B.-S., Tseng, P.-T., and Fan, K.-C.
(2006). Lane detection with moving vehicles in the
traffic scenes. IEEE Transactions on intelligent trans-
portation systems, 7(4):571–582.
Chiu, K.-Y. and Lin, S.-F. (2005). Lane detection using
color-based segmentation. In IEEE Proceedings. In-
telligent Vehicles Symposium, 2005., pages 706–711.
IEEE.
Choi, H.-C. and Oh, S.-Y. (2010). Illumination invariant
lane color recognition by using road color reference
& neural networks. In The 2010 International Joint
Conference on Neural Networks (IJCNN), pages 1–5.
IEEE.
Chougule, S., Koznek, N., Ismail, A., Adam, G., Narayan,
V., and Schulze, M. (2018). Reliable multilane detec-
tion and classification by utilizing cnn as a regression
network. In Proceedings of the European Conference
on Computer Vision (ECCV).
de Paula, M. B. and Jung, C. R. (2013). Real-time detection
and classification of road lane markings. In 2013 XXVI
Conference on Graphics, Patterns and Images, pages
83–90. IEEE.
Ghafoorian, M., Nugteren, C., Baka, N., Booij, O., and Hof-
mann, M. (2018). El-gan: Embedding loss driven gen-
erative adversarial networks for lane detection. In Pro-
ceedings of the European Conference on Computer Vi-
sion (ECCV).
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative adversarial nets. In
Advances in neural information processing systems,
pages 2672–2680.
He, B., Ai, R., Yan, Y., and Lang, X. (2016). Accurate
and robust lane detection based on dual-view convo-
lutional neutral network. In 2016 IEEE Intelligent Ve-
hicles Symposium (IV), pages 1041–1046. IEEE.
Hoang, T. M., Hong, H. G., Vokhidov, H., and Park, K. R.
(2016). Road lane detection by discriminating dashed
and solid road lanes using a visible light camera sen-
sor. Sensors, 16(8):1313.
Kim, H., Park, J., Min, K., and Huh, K. (2020). Anomaly
monitoring framework in lane detection with a gener-
ative adversarial network. IEEE Transactions on In-
telligent Transportation Systems.
Kim, Z. (2008). Robust lane detection and tracking in chal-
lenging scenarios. IEEE Transactions on Intelligent
Transportation Systems, 9(1):16–26.
Lee, C. and Moon, J.-H. (2018). Robust lane detection and
tracking for real-time applications. IEEE Transactions
on Intelligent Transportation Systems, 19(12):4043–
4048.
Lee, S., Kim, J., Shin Yoon, J., Shin, S., Bailo, O., Kim, N.,
Lee, T.-H., Seok Hong, H., Han, S.-H., and So Kweon,
I. (2017). Vpgnet: Vanishing point guided network for
lane and road marking detection and recognition. In
Proceedings of the IEEE international conference on
computer vision, pages 1947–1955.
Linarth, A. and Angelopoulou, E. (2011). On feature
templates for particle filter based lane detection. In
2011 14th International IEEE Conference on Intel-
ligent Transportation Systems (ITSC), pages 1721–
1726. IEEE.
Liu, G., W
¨
org
¨
otter, F., and Markeli
´
c, I. (2010). Combining
statistical hough transform and particle filter for robust
lane detection and tracking. In 2010 IEEE Intelligent
Vehicles Symposium, pages 993–997. IEEE.
Liu, T., Chen, Z., Yang, Y., Wu, Z., and Li, H. (2020).
Lane detection in low-light conditions using an effi-
cient data enhancement: Light conditions style trans-
fer. arXiv preprint arXiv:2002.01177.
Lo, S.-Y., Hang, H.-M., Chan, S.-W., and Lin, J.-J. (2019a).
Efficient dense modules of asymmetric convolution
for real-time semantic segmentation. In Proceedings
of the ACM Multimedia Asia, pages 1–6.
Lo, S.-Y., Hang, H.-M., Chan, S.-W., and Lin, J.-J. (2019b).
Multi-class lane semantic segmentation using efficient
convolutional networks. In 2019 IEEE 21st Inter-
national Workshop on Multimedia Signal Processing
(MMSP), pages 1–6. IEEE.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
456

L
´
opez, A., Serrat, J., Canero, C., Lumbreras, F., and Graf,
T. (2010). Robust lane markings detection and road
geometry computation. International Journal of Au-
tomotive Technology, 11(3):395–407.
Mammeri, A., Boukerche, A., and Lu, G. (2014). Lane
detection and tracking system based on the mser al-
gorithm, hough transform and kalman filter. In Pro-
ceedings of the 17th ACM international conference on
Modeling, analysis and simulation of wireless and mo-
bile systems, pages 259–266.
Neven, D., De Brabandere, B., Georgoulis, S., Proesmans,
M., and Van Gool, L. (2018). Towards end-to-end
lane detection: an instance segmentation approach. In
2018 IEEE intelligent vehicles symposium (IV), pages
286–291. IEEE.
Pan, X., Shi, J., Luo, P., Wang, X., and Tang, X. (2018).
Spatial as deep: Spatial cnn for traffic scene under-
standing. In Thirty-Second AAAI Conference on Arti-
ficial Intelligence.
Sani, Z. M., Ghani, H. A., Besar, R., Azizan, A., and Abas,
H. (2018). Real-time video processing using contour
numbers and angles for non-urban road marker classi-
fication. International Journal of Electrical & Com-
puter Engineering (2088-8708), 8(4).
Yoo, S., Seok Lee, H., Myeong, H., Yun, S., Park, H., Cho,
J., and Hoon Kim, D. (2020). End-to-end lane marker
detection via row-wise classification. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition Workshops, pages 1006–1007.
Road Lane Detection and Classification in Urban and Suburban Areas based on CNNs
457
