
Effect of Interaction Design of Reinforcement Learning Agents on
Human Satisfaction in Partially Observable Domains
Divya Srivastava, Spencer Frazier, Mark Riedl and Karen M. Feigh
Georgia Institute of Technology, Atlanta, Georgia, U.S.A.
Keywords:
Human-robot Interaction, Interactive Reinforcement Learning, Interactive Machine Learning, Algorithm
Design, User Experience.
Abstract:
Interactive machine learning involves humans teaching with agents during their learning process. As this field
grows, it is pertinent that laymen teachers, i.e. those without programming or extensive ML experience, are
able to easily and effectively teach the agents. Previous work has investigated which factors contribute to the
teacher’s experience when training agents in a fully observable domain. In this paper, we investigate how
four different interaction methods affect agent performance and teacher experience in partially observable
domains. As the domain in which the agent is learning becomes more complex, it accumulates less reward
overall and needs more advice from the teacher. It is found that the most salient features that affect teacher
satisfaction are agent compliance to advice, response speed, instruction quantity required, and reliability in
agent response. It is suggested that machine learning algorithms incorporate a short time delay in the agent’s
response and maximize the agent’s adherence to advice to increase reliability of the agent’s behavior. The need
to generalize advice over time to reduce the amount of instruction needed varies depending on the presence of
penalties in the environment.
1 INTRODUCTION
Traditionally, the role of a human in machine learning
(ML) is limited to loading data, picking which fea-
tures to extract, and post-processing the output of the
ML algorithm. There is no human interaction dur-
ing the actual learning process. ML experts rely on
their contextual knowledge of the problem to evaluate
the results and then reiterate on the ML algorithm un-
til the learning process converges on expected behav-
ior. In interactive machine learning (IML), humans
play an active role during the learning process of ma-
chine learning agents (Thomaz et al., 2005). Interac-
tive reinforcement learning (IRL) is a subset of IML
that has proven to converge quicker on desired behav-
ior than traditional ML techniques with no human in-
teraction (Krening and Feigh, 2018), which indicates
value in having users interact with agents during their
learning process. The overall field of IML focuses on
human-in-the-loop studies because as artificial intelli-
gence becomes more commonplace in everyday life,
we want non-experts to be able to interact with and
train agents easily.
Typically, reinforcement learning (RL) algorithms
are evaluated using objective RL metrics, such as cu-
mulative reward, total steps per episode, and training
time. When previous studies have sought to evaluate
IML agents, they have relied heavily on oracles to aid
agents during the learning process, and have shown
significant training efficiency impacts when the fre-
quency and accuracy of the advice are varied (Frazier
and Riedl, 2019). But while the consistency and re-
peatability of oracles may be useful to understand the
effects of possible human behavior on IML agents,
studies have shown that this is not equivalent to hu-
mans directly interacting with the agents (Amershi
et al., 2014). Additionally, simulated human input
cannot answer questions regarding the experience of
a human teacher, who can have emotional responses
such as frustration or confusion. Human experiences
teaching agents have been shown to vary based on
the training modality or interaction mechanism used
(Krening and Feigh, 2019).
An added challenge of human-in-the-loop training
is that humans adapt their teaching style based on the
context of the task domain and their assessment of
the capabilities of the agent (Thomaz and Breazeal,
2006). For example, if a student is doing a task well
on their own without a teacher’s help, the teacher may
leave them to their own devices and just monitor the
student in case they do end up needing help. Con-
versely, if a student is struggling with a task or is
174
Srivastava, D., Frazier, S., Riedl, M. and Feigh, K.
Effect of Interaction Design of Reinforcement Learning Agents on Human Satisfaction in Partially Observable Domains.
DOI: 10.5220/0010240101740181
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 2: HUCAPP, pages
174-181
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

headed in the wrong direction, a teacher tends to step
in and guide them with more explicit and frequent
instruction to help them accomplish the task. The
teacher’s teaching style changes depending on what
is needed from them at the time.
Ideally, when teaching an agent to do a task, the
teacher would have all the necessary and relevant in-
formation needed to complete the task. They would
know what to do with the information at hand to ac-
complish the goal. Domains with this property are
known as fully observable domains. However, realis-
tically, many domains do not have such traits. Hu-
mans are often presented with situations in which
they have only partial information of the environment,
known as a partially observable domain. They are re-
quired to make decisions to satisfy their goals, which
is often done by filling in knowledge gaps as they
proceed with their task (Klein and O’Brien, 2018).
When teaching agents, we want to mimic real world
situations in which the human teacher has limited
knowledge and must give advice to the agent based
on their current understanding of the environment, as
more and more information about the environment is
revealed. Real world environments also yield con-
straints in the form of direct consequences for actions.
Previous work has investigated how different
methods of an interaction algorithm affect human ex-
perience in teaching ML agents in a fully observ-
able environment with penalties (Krening and Feigh,
2019). The penalties are a result of hazards in the en-
vironment that simulate real world constraints. It was
found that the human’s level of frustration teaching
the agent, and how intelligent the teacher thinks the
agent is, are affected greatly by the method used to
interact with the agent. Specifically, in a fully observ-
able domain with penalties, it was found that quick
agent response times and the adherence to the advice
given were highly correlated with human teaching sat-
isfaction.
This paper expands upon (Krening and Feigh,
2019) to investigate which interaction features affect
user experience in teaching ML agents in partially ob-
servable domains with and without penalties. It is
hypothesized that the findings of the fully-observable
domain will not hold in a partially observable domain,
and that the introduction of penalties will cause the
human teacher to be more conservative in their ad-
vice.
2 METHOD
In this study, we conducted two repeated measures,
within-subject experiments in which we investigated
the effect of 4 different interaction methods on the
participant’s experience of teaching the agent. The
experiment took place in-person, and collected data
from 24 participants and 30 participants for each
study, respectively. All participants were ML novices,
and the ordering of the trials was randomized accord-
ing to a Latin square design. We made a concerted
effort to recruit individuals from the general popula-
tion.
The participants were required to teach each agent
to navigate a maze developed in the Malmo minecraft
platform. In the game, there are 2 players: the agent,
and a non-playable character. The agent needs to nav-
igate through the maze to find and approach the non-
playable character. In the first experiment, there were
no penalties. In the second, there were penalties as-
sociated with a water hazard. If the agent entered the
water, the agent fails the task is penalized with neg-
ative reward. The participant is able to see the maze
in two ways: an isometric view, in which part of the
maze is obscured, and the agent’s point of view from
within the maze (Figure 1) – both of which provide
only partial observability. The goal of the task is to
find and approach a non-playable character situated
near the end of the maze.
Figure 1: Partially Observable Maze in Minecraft. Left win-
dow shows isometric view. Right window shows agent’s
POV from within the maze.
The teachers provided advice to the agent in the
form of arrow key presses on the keyboard, which
were sent to an interaction algorithm (for all of the
algorithm methods). The interaction algorithm col-
laborated with the reinforcement learning agent to
select which action to take. All agents share the
same action-selection process (see 2.2), and so all are
equally capable of completing the task.
Participants were told to repeat the task for as
many training episodes as they felt was necessary
to achieve satisfactory performance from the agent.
They were also told that they could stop training if
they were too frustrated to continue, or for any other
reason. As a result, the training time per episode var-
ied for every participant and interaction algorithm.
After each agent was trained, the participant was
asked to complete a questionnaire about their experi-
ence. At the end of the experiment, participants were
Effect of Interaction Design of Reinforcement Learning Agents on Human Satisfaction in Partially Observable Domains
175
given a final questionnaire comparing all four interac-
tion methods.
2.1 Action Advice Interaction Methods
In this work, we implement four interaction methods:
5-Step, 1-Step, Probabilistic, and Time Delay (Kren-
ing and Feigh, 2019), summarized in Table 1 . In the
5-Step method, the agent moves for 5 steps in the di-
rection advised by the teacher. For example, if the
teacher advises the agent to ”move forward” (up ar-
row), the agent will do so for 5 steps before revert-
ing back to its action selection process. The 5 steps
may be interrupted by the teacher at any time with
new advice. In the 1-Step method, the agent moves
for 1 step in the direction advised by the teacher be-
fore returning back to its action selection process. In
the Probabilistic method, the agent has a 60% chance
of following the teacher’s advice. The Probabilistic
variation is implemented to mimic the stochastic na-
ture of an agent in a real-world environment, and tests
how inconsistent agent behavior affects teachers. In
the Time Delay method, a two-second delay is intro-
duced between the time the advice is given and the
time the agent executes that advice. During that de-
lay, the agent stands still in its current position.
Table 1: Four Variations of Intearction Algorithm.
1-Step: Advice is
followed for 1 step in
the direction advised
by the teacher
5-Step: Advice is
followed for 5 steps in
the direction advised
by the teacher
Time Delay: Advice is
followed for 1 step in
the direction advised
by the teacher after a
2-second delay
Probabilistic: Agent
chooses whether to
follow advice based on
a probability
2.2 Action Selection Process
Two action-advice augmented reinforcement learn-
ing algorithms are used for action selection. The
first is the Newtonian Action Advice (NAA) algo-
rithm (Krening, 2018) which is used to implement the
5-Step interaction algorithm. The second is based on
the Feedback Arbitration (FA) algorithm (Lin et al.,
2017), a specific form of Q-learning that leverages
Deep Neural Networks. In this work, in addition
to the standard reinforcement learning training loop,
an arbiter, continually assesses feedback consistency
and quality versus the confidence it has in its learned
policy. Feedback Arbitration is already designed to
work in 3D virtual environments similar to Minecraft
though on much simpler maps.
The Feedback Arbitration (FA) algorithm is a
DQN algorithm with an off-policy arbiter. Action ad-
vice given by the teacher is queued up in a pending
advice array. Queued advice instances dequeue after
some time. The agent either consults the pending ad-
vice array, explores the environment using a random
action, or exploits its Q-network by picking the action
it believes has the highest utility in the current state.
Random actions are chosen according to the standard
ε-greedy exploration vs exploitation strategy, with ε-
decaying over time. If the confidence is low, as it is
in this work, the agent chooses to consult the action
advice provided by human participants. Otherwise, it
measures its confidence in its Q-network. Then the
Q-network confidence score is computed as:
relativeCost =
−1
ln
p
(
min
a∈A(s)
L
a
L
max
) − 1
(1)
where L
a
is the loss value for the predicted activation
of action a in the current state and L
max
is the highest
loss observed by the DQN thus far.
It is worth mentioning that potential-based
reward-shaping (Ng et al., 1999) would greatly im-
prove the training efficiency of this agent but was not
implemented to adhere to this work’s implementation.
2.3 Objective ML Measures
While participants were training the agents, objec-
tive performance metrics were logged to data files:
1) training time per episode, 2) cumulative reward
earned per episode, 3) the number of times the teacher
provided advice per episode, 4) the number of steps
the agent took to complete an episode. This data is
normalized across both studies to allow for compari-
son.
2.4 Human Experience Measures
After training each agent, participants completed a
questionnaire. The participants were asked to rate
the intelligence of the agent on a interval scale from
[0:10]. A rating of 0 indicated that the agent was
not intelligent, while a rating of 10 meant very in-
telligent. The same scale of [0:10] was used for four
additional metrics: the agent’s overall performance,
transparency in how it used the teacher’s advice, im-
mediacy in responding to the teacher’s advice, and
the teacher’s level of frustration. A score of 0 cor-
responded to poor performance from the agent, un-
clear use of feedback, a slower response time, and low
frustration on the teacher’s part. Scores of 10 indi-
cated excellent performance from the agent, clear use
HUCAPP 2021 - 5th International Conference on Human Computer Interaction Theory and Applications
176
of feedback, an immediate response time, and high
frustration levels for the teacher.
At the end of the experiment, participants were
asked to rank all four agents from most to least in-
telligent, and the easiest to hardest to train. Addition-
ally, participants were asked in a free-response ques-
tion why they ranked the agents the way they did.
This was done to elicit the factors that affected their
perception of the agents, and thus, each interaction
method. These written responses were entirely free
form with no priming by the experimenter.
3 RESULTS AND DISCUSSION
This section presents the results obtained from a pre-
vious study (Krening and Feigh, 2019), combined
with the two studies conducted in this work. We com-
pare the results to show the change in metrics from a
fully observable domain with penalties (Study 0), to a
partially observable domain without penalties (Study
1), to a partially observable domain with penalties
(Study 2). All data has been normalized using min-
max normalization. Tables 2, 3, 4, and 5 show the re-
sults of a two-way within subjects ANOVA for Study
1 and 2, respectively across the dependent variables of
Number of Steps Taken, Quantity of Advice Given,
the Cumulative reward, and Training Time. Unless
otherwise noted, all assumptions for this analysis are
met and the order of the presentations of the agents
was not significant.
3.1 Objective Metrics
In this section of results, all figures include signifi-
cance bars from post-hoc analyses. One star (*) indi-
cates a P-value <= 0.05. Two stars (**) indicates a P-
value <= 0.01. Three stars (***) indicates a P-values
<= 0.001. Four stars (****) indicates a P-value <=
0.0001.
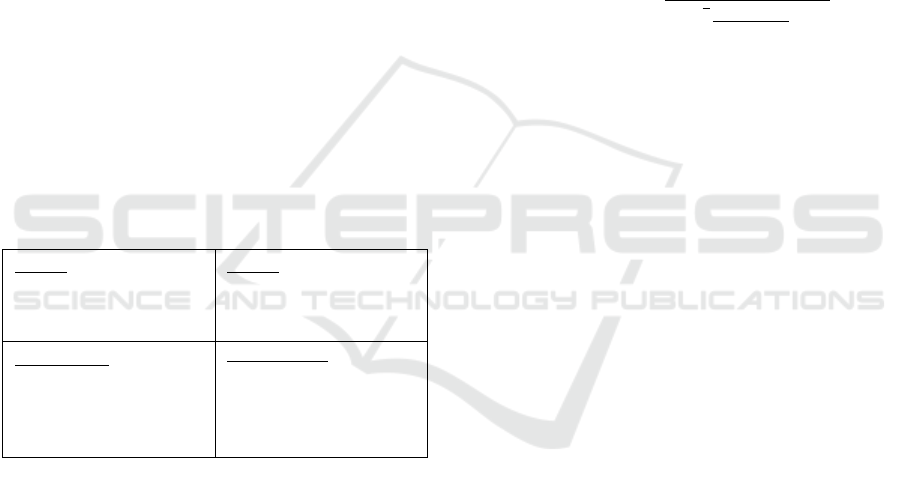
Table 2: Repeated-Measures ANOVA for Steps Taken.
Study SS d f F P
1
Alg. 36321 3 57.5 <2e-16
Order 52 1 0.25 0.621
2
Alg. 11724 3 33.3 <2e-16
Order 81 1 0.67 0.413
Table 2 shows the results for the number of steps
taken by the agent per episode. It can be seen that
the average number of steps the agent took to com-
plete each level is not equal across the different vari-
ations of the interaction algorithm. Figure 2 shows
Figure 2: Steps taken to complete an episode in three dif-
ferent domains.
that, as the domain becomes more complex, the num-
ber of steps it takes to complete an episode is roughly
the same for the 1-Step and Time Delay variation. It
can be seen that introducing probability to the user
interaction results in an increasing number of steps
per episode. Further, introducing a time delay proves
most problematic when penalties exist in the environ-
ment.
Table 3: Repeated-Measures ANOVA for Advice Given.
Study SS d f F P
1
Alg. 4118 3 5.91 6.48e-04
Order 2147 1 0.25 2.61e-03
2
Alg. 3563 3 4.76 2.34e-03
Order 778 1 3.12 0.078
Table 3 shows the results for the quantity of advice
given by the participants. It can be seen that the aver-
age amount of advice the agent took to complete each
level is not equal across all of the interaction meth-
ods. All methods aside from Probabilistic received
roughly the same amount of advice from the teacher.
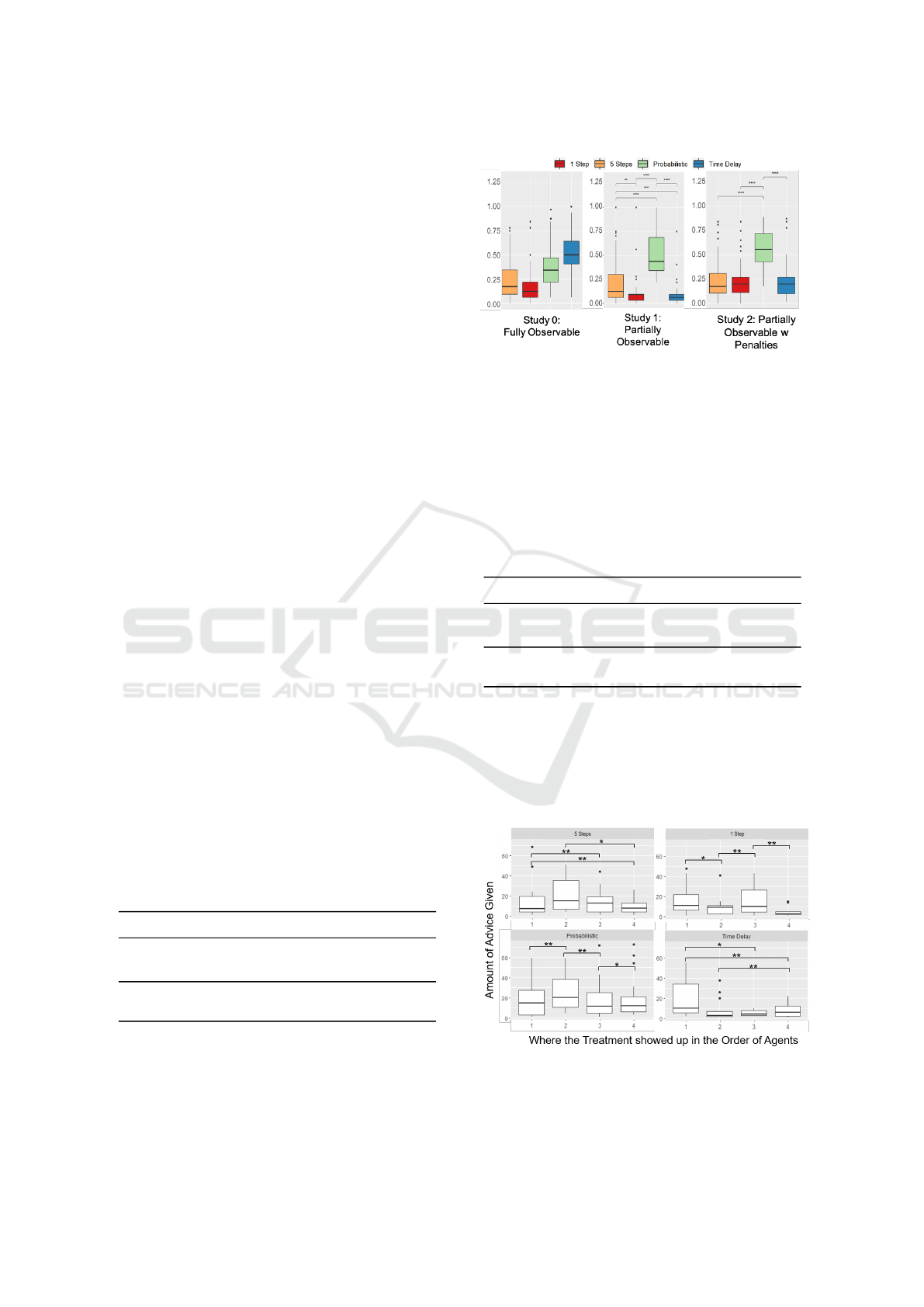
Figure 3: How much advice was given to an agent depend-
ing on when they were shown to the teacher.
The order in which the agents were shown to the
Effect of Interaction Design of Reinforcement Learning Agents on Human Satisfaction in Partially Observable Domains
177
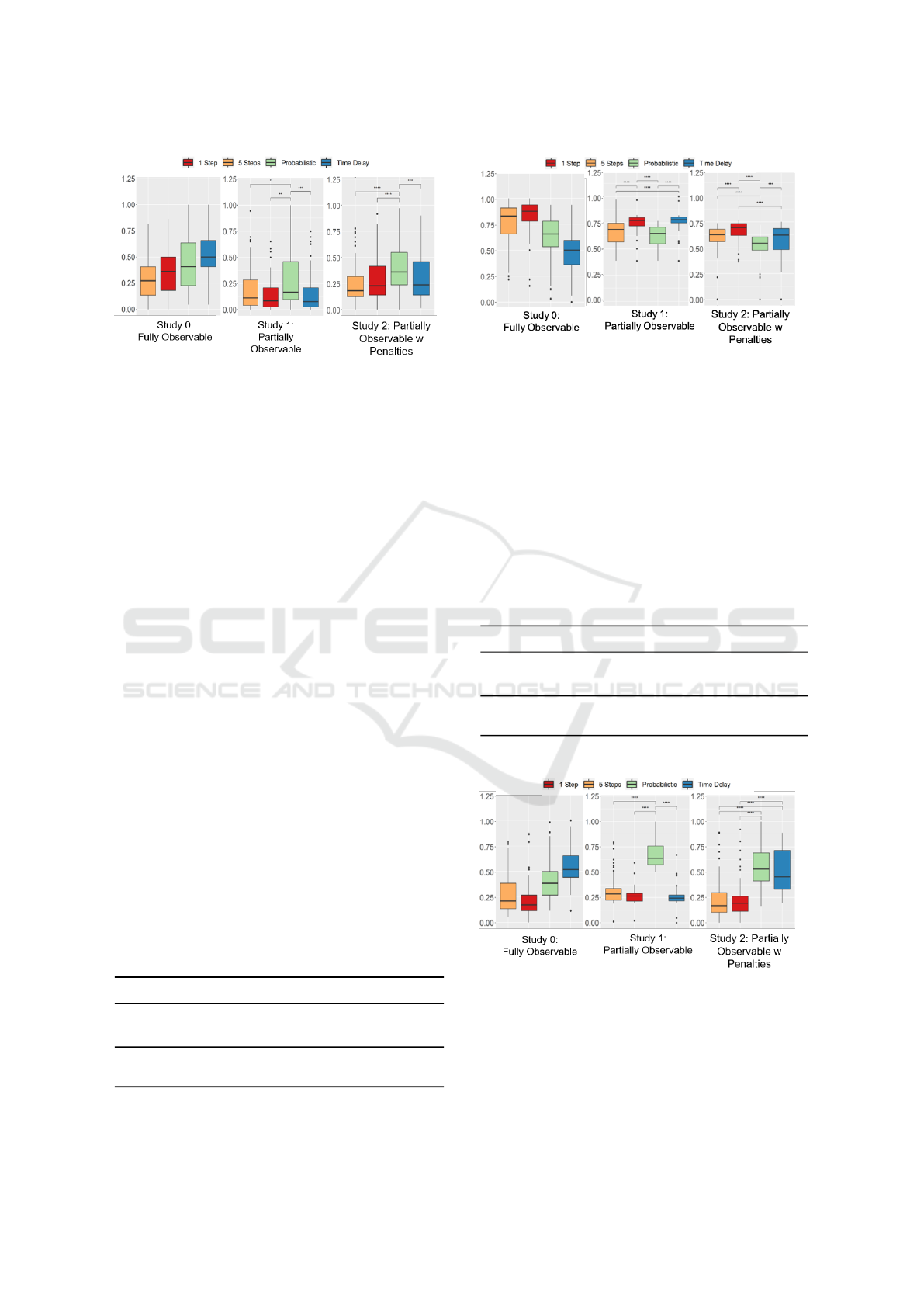
Figure 4: Amount of advice given per episode in three dif-
ferent domains.
participant was significant in Study 1. Further anal-
ysis (Figure 3) into this shows that, aside from the
Probabilistic treatment, there was a decrease in the
amount of advice given to the agents that the partic-
ipant saw in the latter half of the experiment. This
indicates that the participant either became fatigued
and/or disengaged in teaching the agents.
Figure 4 shows that, as the domain becomes more
complex, the quantity of advice given by the teacher
will vary depending on the domain. In the partially
observable domain without penalties, people provided
less advice for the Time Delay interaction than the
other methods, which is surprising because in the
fully observable domain, the Time Delay agent was
given the most advice. In the partially observable do-
main, the 1-Step agent was a close second in terms of
least amount of advice needed, followed by the 5-Step
agent. This is interesting because theoretically, with
the 5-Step interaction, the teacher would not be giv-
ing advice at each time step. It is possible that people
may have given advice in the middle of the agent tak-
ing 5 steps in order to change the agent’s direction,
which resulted in more advice being given. In the
partially observable domain with penalties, more ad-
vice is needed from the teacher in navigating around
the penalties. It is interesting to see that the 5-Step
method required the least amount of advice in the do-
mains with penalties, but not in the partially observ-
able domain without penalties.
Table 4: Repeated-Measures ANOVA for Earned Reward.
Study SS d f F P
1
Alg. 53987 3 26.2 <8.4e-15
Order 949 1 1.38 0.241
2
Alg. 14767 3 6.39 3.05e-04
Order 615 1 0.79 0.372
Table 4 shows the results for the amount of earned
Figure 5: Reward earned per episode in three different do-
mains.
reward. It can be seen that the reward earned per
episode is not equal across the variations of the in-
teraction algorithm. A post-hoc pairwise analysis for
both Study 1 and 2 shows that there was a signif-
icant difference in the reward earned by the prob-
ability variation and the reward earned by all the
other variations. Figure 5 shows that, as the domain
becomes more complex, the cumulative reward de-
creases across all agents. Furthermore, the 1-Step
method continuously accumulates the highest reward.
Table 5: Repeated-Measures ANOVA for Total Training
Time.
Study SS d f F P
1
Alg. 3.6e6 3 195.7 <2e-16
Order 7916 1 1.294 0.256
2
Alg. 9.8e4 3 21.46 5.92e-13
Order 23 1 0.015 0.903
Figure 6: Training time per episode in three different do-
mains.
Table 5 shows the results for total training time. It
can be seen that the training time per episode is not
equal across all of the interaction methods. Figure 6
shows that, in a partially observable domain, the Time
Delay agent took the least amount of time to train per
episode. This may be because the amount of advice
HUCAPP 2021 - 5th International Conference on Human Computer Interaction Theory and Applications
178
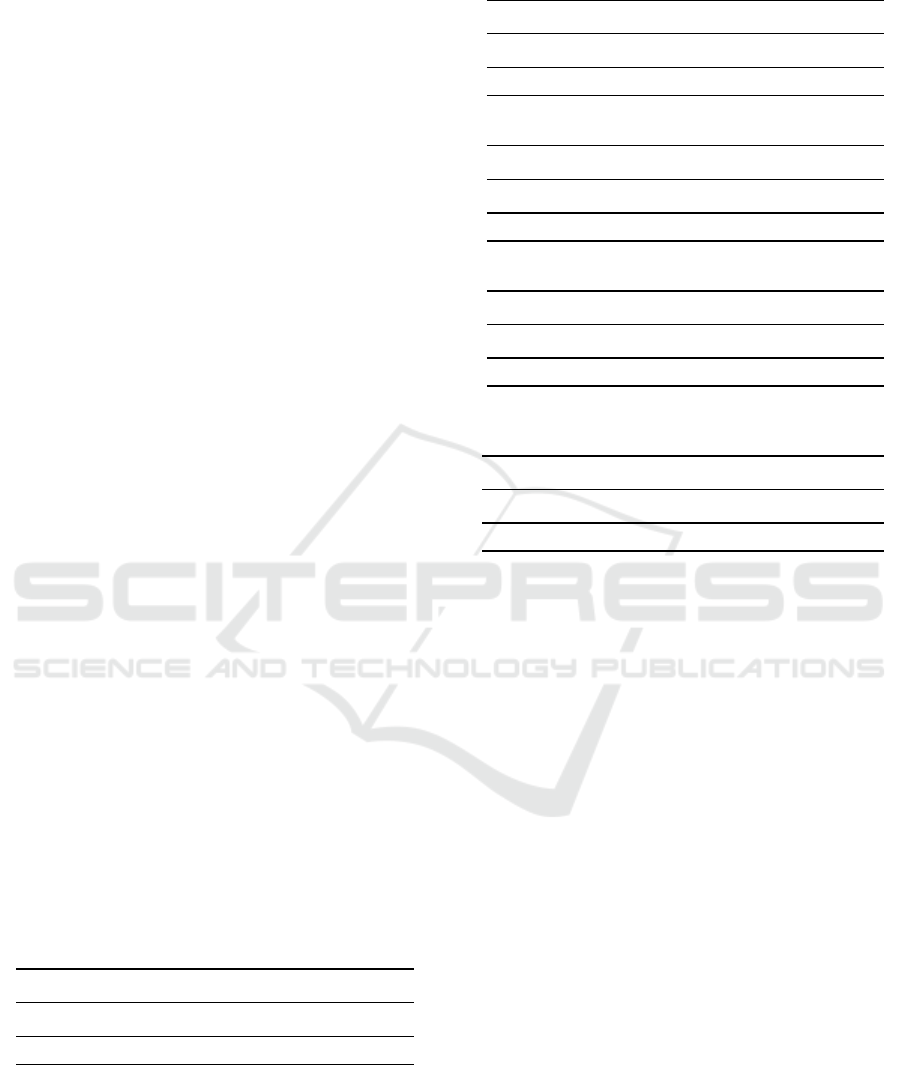
given to the Time Delay agent was consistently lower
than the amount given to the 1-Step agent (Figure 3).
The advice also dropped off significantly and thus the
agent fell back on its FA algorithm and equated the 1-
Step agent in training time. However, the Time Delay
agent took much longer to train in Study 2. The 1-
Step method consistently had the best training time,
followed by the 5-Step method.
It should be noted that, in the domain without
penalties, the Time Delay method resulted in roughly
the same agent performance as the 1-Step method
across all the aforementioned dependant variables.
However, in domains with penalties, the Time Delay
agent performs either slightly or significantly worse
than the 1-Step, depending on observability. From a
performance standpoint, the 1-Step is objectively bet-
ter since it performs well in all domains. However, as
will be shown in the next section, introducing a short
time delay can make for an overall better experience
for the teacher.
3.2 Human Experience Metrics
After teaching each agent, participants answered a
questionnaire about their experience with that agent.
Tables 6-10 show the results of a one-way within
subjects ANOVA for Study 1 and 2, respectively
across the dependent variables of the user’s frustration
level, and perceived intelligence, transparency, re-
sponse time, and perceived performance of the agent.
From the ANOVA results, it is apparent that the de-
sign of the interaction algorithm was significant to
each human measure. Figure 7 shows the compos-
ite of participants’ answers to the questionnaire. For
all human factors metrics except frustration, higher
values indicate a better human experience (better per-
ceived performance, perceived agent intelligence, and
understanding of agent). For frustration, higher val-
ues indicate a higher level of frustration, and therefore
a worse human experience.
Table 6: Repeated-Measures ANOVA for Perceived Intelli-
gence.
Study SS d f F P
1 Alg. 404 3 26.66 7.20e-13
2 Alg. 270 3 17.97 1.20e-09
The Probabilistic method consistently rated worse
than other interaction methods in partially observable
domains. Unreliable behavior from the agent kept the
teacher engaged for the duration of the task (Figure
3), which indicates that the teacher was able to pick
up on the lack of predictability in the agent’s behavior,
Table 7: Repeated-Measures ANOVA for Frustration.
Study SS d f F P
1 Alg. 436 3 27.62 3.22e-13
2 Alg. 216 3 9.341 1.40e-05
Table 8: Repeated-Measures ANOVA for Transparency.
Study SS d f F P
1 Alg. 369 3 22.33 3.07e-11
2 Alg. 216 3 9.32 1.43e-05
Table 9: Repeated-Measures ANOVA for Response Time.
Study SS d f F P
1 Alg. 419 3 21.92 4.45e-11
2 Alg. 207 3 10.61 3.24e-06
Table 10: Repeated-Measures ANOVA for Perceived Per-
formance.
Study SS d f F P
1 Alg. 184 3 16.37 8.70e-09
2 Alg. 72.1 3 9.64 9.89e-06
but this led to high frustration. Frustration levels were
much higher compared to the other methods, and the
agent received low scores in terms of every other di-
mension measured. This indicates that unreliable be-
havior from an agent makes for a poorer teaching ex-
perience, especially in a partially observable domain.
Conversely, compared with the fully observable
domain, the Time Delay interaction method was the
most improved method. Whereas it consistently rated
as the worst interaction method in a fully observable
domain, once the domain became more complex and
only partially observable, small time delays were con-
sidered more acceptable, and from the intelligence
ratings, perhaps even expected of a more intelligent
agent. In the partially observable domains, the Time
Delay interaction rates very similarly to the 1-Step
and 5-Step interaction methods.
Frustration levels with the agents were lower for
the partially observable domains, but much higher
overall once penalties are introduced. We see that the
Time Delay method actually caused the least frustra-
tion in a domain with penalties. In terms of trans-
parency, the 5-Step method consistently scored the
highest in every study, indicating that the participant
could understand the agent’s actions. All methods
of interaction, except for Probabilistic, resulted in
equal perceived performances. However, once penal-
ties were introduced into the partially observable en-
Effect of Interaction Design of Reinforcement Learning Agents on Human Satisfaction in Partially Observable Domains
179
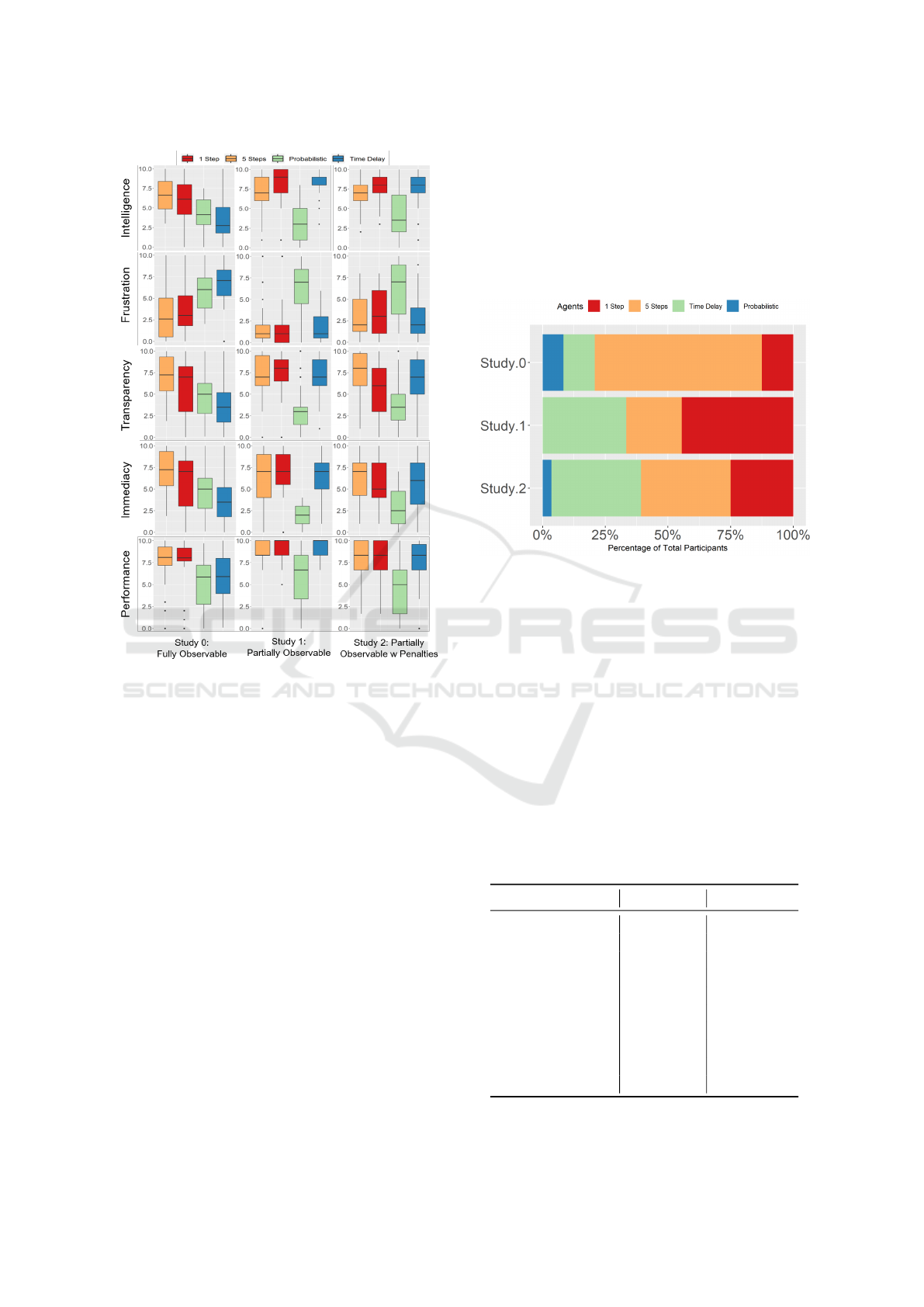
Figure 7: Box plots showing human experience measure
for interaction methods.
vironment, the variance of each agent’s perceived per-
formance increased.
In terms of the perceived intelligence of the
agents, the 5-Step method is considered the most in-
telligent in fully observable domains, while the 1-Step
method is considered the most intelligent in partially
observable domains. However, once penalties are in-
troduced into the partially observable environment,
the Time Delay method is considered equally intel-
ligent to the 1-Step method, probably because it per-
forms the same way as the 1-Step method, just slower.
The perceived intelligence of the agent is analyzed
more closely in Figure 8, which depicts the partici-
pants’ rankings of the agents from most to least in-
telligent at the end of the experiment. The 5-Step
method is considered one of, if not the most, intelli-
gent agent in the domains with penalties. The 1-Step
interaction method was considered the most intelli-
gent in the domain without penalties. This is inter-
esting because in the individual ratings of the agents’
intelligence shown in Figure 7, the 1-Step agent is
considered one of, if not the most, intelligent agent
in both of the partially observable domains. This in-
dicates that the agent that employed the 5-Step inter-
action method left an overall more positive impres-
sion on the participant after seeing all 4 interaction
methods, even though individually, the 1-Step agent
was considered the most intelligent. It can also be
seen that the Time Delay method steadily gained pop-
ularity from study to study as the domain increased in
complexity.
Figure 8: Rankings of user’s perceived intelligence of the
agent based on interaction method.
In the final questionnaire, participants were also
asked in a free-response question why they ranked
the agents the way they did. According to the re-
sponses, several aspects of the agent’s interaction im-
pacted the participants’ perceived intelligence of the
agent and their own level of frustration in teaching
it. There were many commonalities across the par-
ticipants’ responses; the percentage of participants
who mentioned certain features in their responses are
shown in Tables 11 and 12, corresponding with Study
1 and Study 2, respectively.
Table 11: Percentage of participants who mentioned in
their long responses certain features that contributed to the
user experience of Frustration and Perceived Intelligence in
Study 1: Partially Observable Domain.
Feature Frustration Intelligence
Compliance 67 67
Effort 24 14
Frustration 10 10
Immediacy 33 38
Improvement 0 0
Less Instruction 29 24
Memory 10 24
Randomness 33 33
Repeating Myself 0 0
Transparency 33 43
HUCAPP 2021 - 5th International Conference on Human Computer Interaction Theory and Applications
180
Table 12: Percentage of participants who mentioned in
their long responses certain features that contributed to the
user experience of Frustration and Perceived Intelligence in
Study 2: Partially Observable Domain with Penalties.
Feature Frustration Intelligence
Compliance 50 47
Effort 7 0
Frustration 13 4
Immediacy 47 30
Improvement 7 17
Less Instruction 13 27
Memory 3 17
Randomness 27 40
Repeating Myself 7 4
Transparency 23 7
In the fully observable domain, the top aspects
cited by participants as impacting their overall experi-
ence teaching the agent were: 1) compliance with ad-
vice (whether the agent followed the person’s advice),
2) response time (how quickly the agent followed ad-
vice), 3) quantity of instruction required, and 4) ran-
domness (whether the agent was perceived to act in an
unreliable manner) (Krening and Feigh, 2019). Based
on the responses in Tables 11 and 12, the top aspects
contributing to the user’s experience are the same.
4 CONCLUSIONS
As artificial intelligence becomes more prevalent in
everyday life, the experience of teaching ML agents
must become accessible and easy. A key aspect of en-
abling ML to be accessible and easy to train will be
to understand what interaction mechanisms are most
appropriate and experientially pleasurable. The work
here begins to provide an understanding of the im-
pact of different interaction methods on human ex-
periences in domains of varying complexity. In all
domains, it is recommended to maximize an agent’s
adherence to advice and reliability in behavior. In
partially observable domains, it appears to be both al-
lowable and even recommended to incorporate a short
time delay to give the teacher some time to make a de-
cision regarding the agent’s next action. The decision
of generalizing movement through time is left to the
algorithm designer since the user perception and ob-
jective performance of these interaction methods vary
in partially observable domains.
ACKNOWLEDGMENTS
We thank Dr. Sam Krening for sharing data from
Study 0 and for her support. This work was funded
under ONR grant number N000141410003. All opin-
ions and conclusions expressed are solely those of the
authors.
REFERENCES
Amershi, S., Cakmak, M., Knox, W. B., and Kulesza, T.
(2014). Power to the people: The role of humans in
interactive machine learning. volume 35, pages 105–
120.
Frazier, S. and Riedl, M. (2019). Improving deep rein-
forcement learning in minecraft with action advice. In
Proceedings of the AAAI Conference on Artificial In-
telligence and Interactive Digital Entertainment, vol-
ume 15, pages 146–152.
Klein, N. and O’Brien, E. (2018). People use less informa-
tion than they think to make up their minds. volume
115, pages 13222–13227. National Academy of Sci-
ences.
Krening, S. (2018). Newtonian action advice: Integrating
human verbal instruction with reinforcement learning.
In arXiv, arXiv:1804.05821.
Krening, S. and Feigh, K. M. (2018). Interaction algorithm
effect on human experience with reinforcement learn-
ing. volume 7, New York, NY, USA. Association for
Computing Machinery.
Krening, S. and Feigh, K. M. (2019). Effect of interac-
tion design on the human experience with interactive
reinforcement learning. In Proceedings of the 2019
on Designing Interactive Systems Conference, page
1089–1100. Association for Computing Machinery.
Lin, Z., Harrison, B., Keech, A., and Riedl, M. O. (2017).
Explore, exploit or listen: Combining human feed-
back and policy model to speed up deep reinforcement
learning in 3d worlds. ArXiv, abs/1709.03969.
Ng, A. Y., Harada, D., and Russell, S. (1999). Policy invari-
ance under reward transformations: Theory and appli-
cation to reward shaping. In ICML, volume 99, pages
278–287.
Thomaz, A. L. and Breazeal, C. (2006). Reinforcement
learning with human teachers: Evidence of feedback
and guidance with implications for learning perfor-
mance. In Proceedings of the 21st National Confer-
ence on Artificial Intelligence - Volume 1, AAAI’06,
page 1000–1005. AAAI Press.
Thomaz, A. L., Hoffman, G., and Breazeal, C. (2005). Real-
time interactive reinforcement learning for robots. In
In: Proc. of AAAI Workshop on Human Comprehensi-
ble Machine Learning.
Effect of Interaction Design of Reinforcement Learning Agents on Human Satisfaction in Partially Observable Domains
181
