
Traffic Sign Recognition System based on Belief Functions Theory
Nesrine Triki
1a
, Mohamed Ksantini
1b
and Mohamed Karray
2c
1
National School of Engineers of Sfax, University of Sfax, Sfax, Tunisia
2
ESME Sudria, The Embedded and Electronic Systems Lab, Ivry Sur Seine, France
Keywords: Advanced Driver Assistance Systems (ADAS), Autonomous Vehicles, Traffic Sign Recognition, Belief
Functions, Artificial Intelligence, Machine Learning, Image Processing.
Abstract: Advanced Driver Assistance Systems (ADAS) have a strong interest in road safety. This type of assistance
can be very useful for collision warning systems, blind spot detection and track maintenance assistance.
Traffic Sign Recognition system is one of the most important ADAS technologies based on artificial
intelligence methodologies where we obtain efficient solutions that can alert and assist the driver and, in
specific cases, accelerate, slow down or stop the vehicle. In this work, we will improve the effectiveness and
the efficiency of machine learning classifiers on traffic signs recognition process in order to satisfy ADAS
reliability and safety standards. Hence, we will use MLP, SVM, Random Forest (RF) and KNN classifiers on
our traffic sign dataset first, each classifier apart then, by fusing them using the Dempster-Shafer (DS) theory
of belief functions. Experimental results confirm that by combining machine learning classifiers we obtain a
significant improvement of accuracy rate compared to using classifiers independently.
1 INTRODUCTION
Recent technological advancements are expected to
steer growth in favour of the global autonomous car
industry through 2025. With the emergence of
advanced technology, automakers are expected to
invest heavily in autonomous and electronic vehicle
technology. For instance, “Waymo” began as the
Google Self-Driving Car (Google car) Project in 2009
and has been testing its vehicles since early 2017 until
now (Waymo Safety Report, 2017).
The continuing evolution of automobile
technology aims to deliver even greater safety
benefits and automated driving systems that can one
day handle the whole task of driving when we don’t
want to or can’t do it ourselves. In this context, Traffic
Signs Recognition (TSR) System is considered one of
the most important Advanced Driver Assistance
Systems (ADAS) technologies. It can assist drivers or
be part of automatic driving systems in real time in
order to facilitate the driving process and optimize the
level of safety and comfort on the road.
In fact, in the driving environment, traffic sign
types and patterns are incoherent in various countries.
a
https://orcid.org/0000-0002-2770-2526
b
https://orcid.org/0000-0002-9928-8643
c
https://orcid.org/0000-0001-7293-8696
Hence, the TSR system uses the combined feature of
shape and colour to identify and recognize traffic
signs into many categories such as warning,
regulatory and informative signs. Table 1 shows the
different types of signs used in European roads.
Table 1: European traffic sign categories definition (main
categories and shapes).
Danger/Warning Regulatory Informative
TSR system uses various methods that first detect
and extract the candidates’ regions of the traffic sign
(ROIs) and then classify them according to
predefined classes.
Several methodologies have already been applied
to image recognition and have given good results.
However, they still suffer from such problems like
losing some details of the image when extraction
image features and the ineffectiveness of the used
classifier. In fact, the loss of information is due to
Triki, N., Ksantini, M. and Karray, M.
Traffic Sign Recognition System based on Belief Functions Theory.
DOI: 10.5220/0010239807750780
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 2, pages 775-780
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
775

many forms of external noise like fading and blurring
effect, affected visibility, multiple appearances of the
sign, chaotic background, viewing angle problem,
damaged and partially obscured sign, etc. Hence, we
find ourselves in a situation of indecision where even
the use of machine learning algorithms for the
classification of traffic sign images does not solve the
problem of uncertainty.
Therefore, in order to overcome this limitation,
we propose, in this paper, the use of Dempster-Shafer
(DS) theory of belief functions (Dempster, 1967),
(Shafer, 1976) to make decisions on detected signs
with uncertainty (Yager and Liu., 2008). In order to
classify ROI images, the DS rules of classifiers fusion
will be used by combining the outcomes provided
from MLP, RF, KNN and SVM classifiers.
This paper will be structured as follows: section 2
will present the machine learning algorithms and the
DS theory applied to traffic sign images. Section 3
will describe our proposed contribution to classify
detected traffic signs. Section 4 will show
experimental results and discussion. In the
conclusion, we will propose some perspectives to
extend this work.
2 MACHINE LEARNING AND
DS-THEORY
A lot of works were proposed to deal with image
classification through different machine learning
methods and belief functions, especially the
Dempster-Shafer (DS) theory which is based on rule
combination and fusion of classifiers.
2.1 Machine Learning
A machine learning classifier is a system able to
predict the class of a phenomenon being observed.
The use of a classifier depends on the application
and the nature of available data set. In (Ksantini, Ben
Hassena and Delmotte, 2017) authors present a
comparison between ML classifiers according to 5
criteria: Speed of classification, accuracy, tolerance
to noise and Robustness.
There are a variety of applications areas in which
ML classifiers can be applied like road safety. In this
field of application, several ML classifiers provide
good accuracy rates like:
Multiple Layer Perceptions classifier (MLP) is a
single-layer neural network organized in a
cascade and subdivided in an input layer, one or
more hidden layers and an output layer.
(Genevieve, Taif and Wasfy,2019)
K-nearest neighbour classifier (KNN) is based on
a distance function that calculates similarity
between the object to classify and its neighbours.
(Karthiga, Mansoor and Kowsalya, 2016)
Support Vector Machine classifier (SVM) is
based on the statistical learning theory. Thus, the
goal of this method is a binary classification of
data. (Anusha and Renuka, 2019)
Random Forest classifier (RF) is an ensemble of
classification trees, where each tree contributes
with a single vote for the assignment of the most
frequent class to the input data. (Ellahyani, El
Ansari and El Jaafari, 2016)
In (Wahyono and Kang-Hyun, 2014), authors
employed SVM, RF, KNN and MLP for three types
of traffic sign recognition (warning, prohibition and
mandatory) from the German Traffic Sign Dataset.
Achieved accuracy was 78.7%, 76.3%, 76.3% and
70% for KNN, SVM, RF and MLP classifiers,
respectively.
Authors in (Gomes, Rebouças and Neto, 2016)
presented obtained accuracy rates of several
classifiers for the recognition of the segmented speed
limit digits for embedded applications. Obtained
results were 87.12%, 97.04%, 98.51% for MLP, SVM
and KNN classifiers respectively.
We notice that machine learning algorithms were
used to classify different types of traffic sign images
with proportional accuracy rates that can be improved
by using the strengths of one method to complete the
weakness of another algorithm. In the next part we
introduce belief functions theory which has been
applied to pattern recognition and specially to
supervised classification.
2.2 DS Theory
In the previous part, we have presented the
classification algorithms which can deal only with
certain and complete information. So, in this part we
will treat the case of uncertain data by using belief
functions theory.
The Dempster-Shafer (DS) theory of belief
functions was introduced by Arthur P. Dempster in
the context of statistical inference in 1968, and was
later developed by Glenn Shafer in 1976 as a theory
of evidence. This theory represents the formalism for
making decisions with uncertainty. It has been
applied to supervised and unsupervised classification
(Thierry, 2019).
In (Xu, Krzyzak and Suen, 1992) and (Liu, Pan,
Dezert, Han, and He, 2018), the outputs of classifiers
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
776
have been expressed by the formalism of belief
functions and have been combined with the
Dempster’s rule in the case of classifier fusion.
In (Xu, Davoine, Zha and Denœux, 2016)
(Minary, Pichon, Mercier, Lefevre and Droit, 2017),
the used approach was the conversion of the decisions
obtained from classifiers such as the conversion of the
SVM into belief functions.
The basics of DS theory are:
Mass function m: represents an element of
evidence X with value in Ω and m (A) quantifies
the belief allocated to the proposition. It is defined
by:
m: 2 0 ,1 with m A 1
A
Ω
(1)
Correction of the information: the mass function
m and the belief degree in the reliability of the
source µ. The new mass function of the weakness
operation is:
µ
m A µ* m A ; A Ω
(2)
Information fusion: the mass function m1
obtained from the source S1 and the mass function
m2 obtained from the source S2. The new mass
function after the use of Dempster’ rule is defined
by:
,:
m(m1 m2 A)C m1 * 2B
AB C A B
(3)
Decision making: we need a pignistic
transformation which represents the probability
distribution obtained from the fusion result. This
transformation is defined by:
{A , ω A}
mA
)
Be
((
t
)
p ω
1m A
Ω
(4)
The decision will be made by choosing the
element x with the greatest probability from pignistic
transformation:
x
Rp x argmax Betp ω x
Ω
(5)
3 PROPOSED METHODOLOGY
Our methodology is based on 3 parts:
Data processing
Traffic sign classification using machine learning
classifiers (MLP, SVM, Random Forest and
KNN)
Traffic sign classification using DS theory of
belief functions for classifiers fusion.
3.1 Data Processing
Given the diversity of road sign pictograms for each
country and due to the lack of a French traffic sign
dataset Benchmark, we are led to build a dataset
mixing road signs images from the German Traffic
Sign Dataset and images generated from image
processing codes.
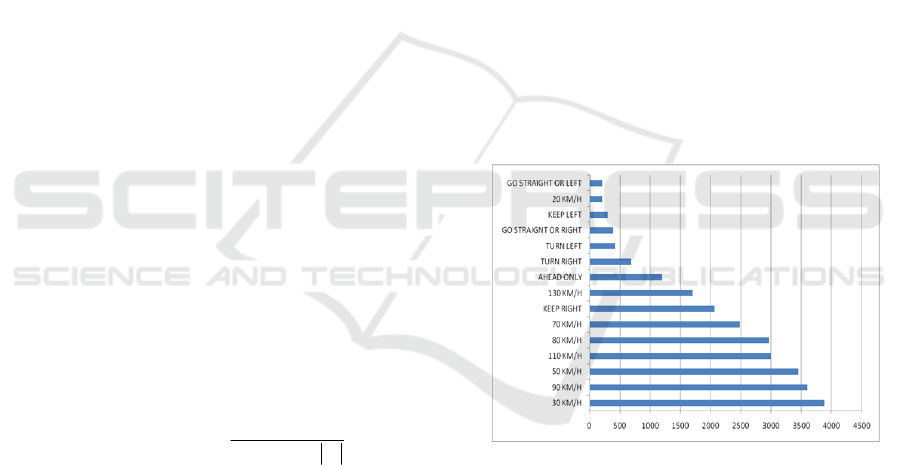
We have built a dataset containing 26560 images
divided into 15 classes (8 speed limit classes and 7
Mandatory traffic signs classes) shown in figure 1. In
fact, the number of samples per class varies from one
class to another. The top class (Speed limit
30km/h) has over 3500 examples while the least
represented class (Go straight or left) has fewer than
500 examples. This unbalanced dataset depends from
the training process.
Our dataset will be gradually incremented in order
to reach all the road signs pictograms.
Figure 1: Distribution of traffic sign images.
According to traffic sign image classification; we
used histogram of oriented gradient (HOG) feature
descriptor in order to extract features from the image.
The main reasons to use it are that it is accurate and
fast and we can easily run the program on a CPU. In
fact, gradients (x and y derivatives) of an image are
useful because the magnitude of gradients is large
around edges and it is known that edges and corners
pack in a lot more information about object shape
than flat regions so the gradient intensities of an
image can reveal some useful local information that
can lead to recognition of the image (Reinaldo,
Manurung, Simbolon and Christnatalis, 2019).
Traffic Sign Recognition System based on Belief Functions Theory
777
After that, machine learning algorithms and DS
theory are applied to determine the best accuracy rate
for traffic sign classification.
3.2 Traffic Signs Classification using
Machine Learning Algorithms
In order to train and test MLP, SVM, RF and KNN
classifiers, we first calculate HOG descriptor for
every image in the dataset. Then, we split data into a
training set (90%) and a testing set (10%). Finally, we
save the trained model obtained in order to validate it
on other traffic sign images detected from a real time
camera.
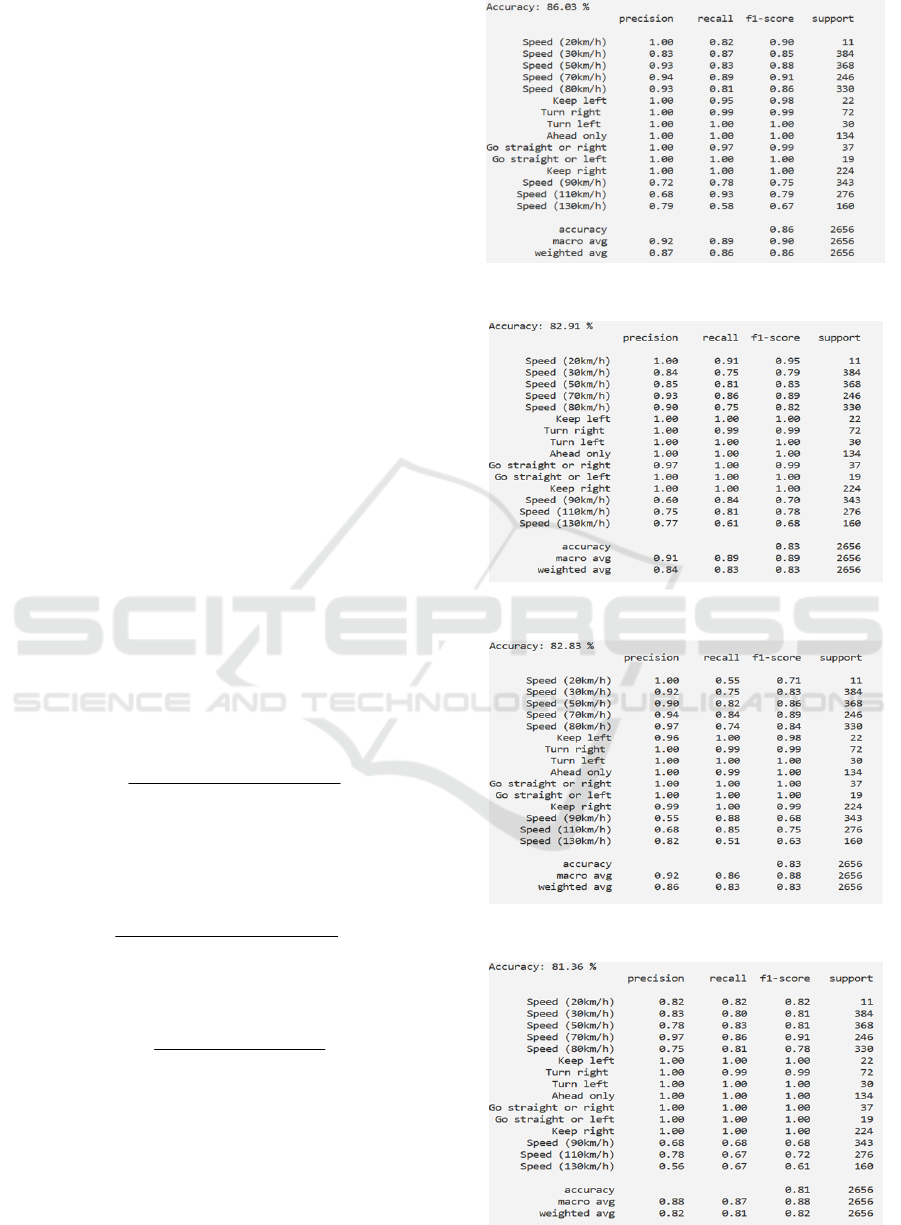
Experimental results shown in Figure 2, 3, 4 and
5 are presented in the form of confusion matrix which
is a table with 4 different combinations of predicted
and actual values (TP, TN, FP and FN):
True Positives (TP): The number of positive
instances that were classified as positive.
True Negatives (TN): The number of negative
instances that were classified as negative.
False Positives (FP): The number of negative
instances that were classified as positive.
False Negatives (FN): The number of positive
instances that were classified as negative.
These combinations are extremely useful for
measuring Precision, Recall and Accuracy rate:
Precision, often referred to as positive predictive
value, is the ratio of correctly classified positive
instances to the total number of instances
classified as positive:
True positive
Precision
True Positive False Positive
(6)
Recall, also called sensitivity or true positive rate,
is the ratio of correctly classified positive
instances to the total number of positive instances:
True positive
Recall
True Positive False Negative
(7)
F1 combines precision and recall as single value:
Precision * Recall
F1 2*
Precision Recall
(8)
We note that all results are obtained with a PC
having the hardware configuration: Intel® Core (TM)
i5-7200 CPU, 64 bits; RAM: 8GB.
We notice from the previous confusion matrix that
the accuracy rate is important: MLP 86%, SVM:
83%, Random Forest: 83% and KNN: 81%. Despite
these results, the traffic sign recognition system must
Figure 2: MLP Confusion matrix.
Figure 3: SVM Confusion matrix.
Figure 4: RF Confusion matrix.
Figure 5: KNN Confusion matrix.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
778
have the minimum of possible errors in order to
ensure road safety requirements.
Therefore, we choose to use DS theory in order to
improve further the accuracy rate of TSR system.
3.3 DS Theory
Given the mass function for every classifier of the DS
theory (m1, m2, m3 and m4) for respectively MLP,
SVM, RF and KNN classifiers, we have got 11 types
of combination (data fusion) between classifiers
based on the mass’s combination DS rule:
m1 ⊕ m2
m1 ⊕ m3
m1 ⊕ m4
m2 ⊕ m3
m2 ⊕ m4
m3 ⊕ m4
m1 ⊕ m2 ⊕m3
m1 ⊕ m2 ⊕m4
m1 ⊕ m3 ⊕m4
m2 ⊕ m3 ⊕m4
m1⊕ m2 ⊕ m3 ⊕m4
The pignistic transformation of the obtained
masses helps us to make a decision about the obtained
algorithms after fusion.
4 EXPERIMENTAL RESULTS
AND DISCUSSION
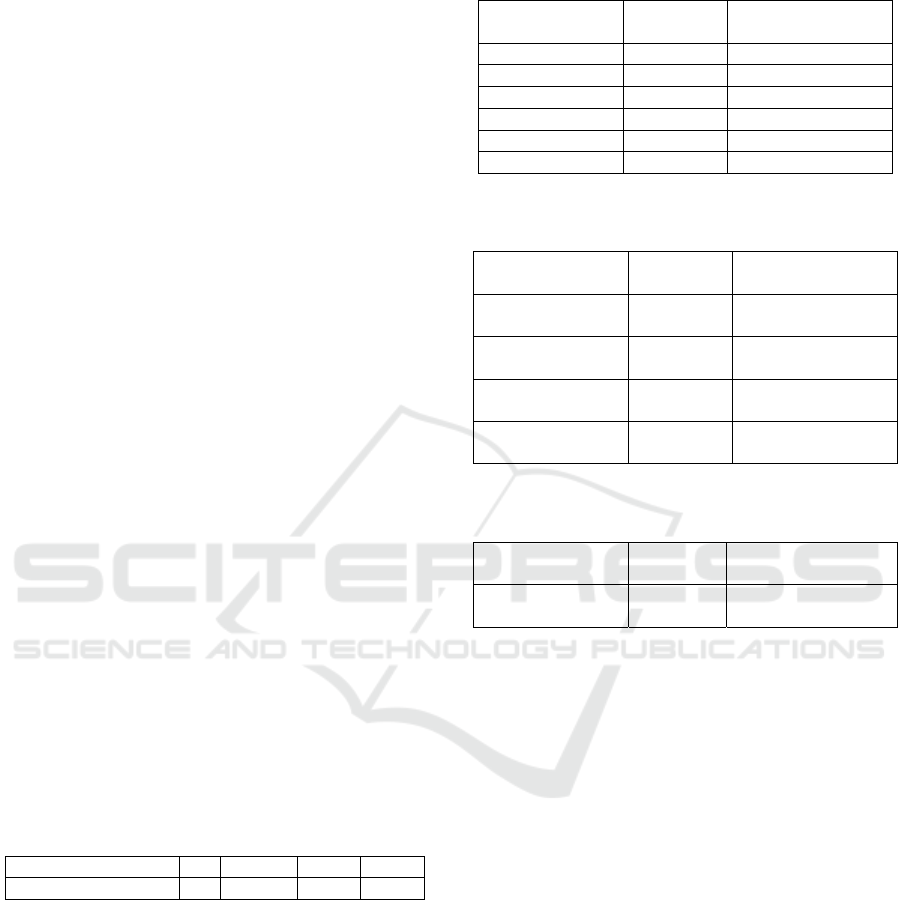
Before using information fusion, each classifier has a
degree of weakness. Table 2 represents the error rate
of the classifiers MLP, SVM, RF and KNN on
validation data set.
Table 2: Degrees of weakness of MLP, SVM, RF and KNN.
Classifier MLP SVM RF KNN
Weakness Degree 13.97 17.09 17.17 18.64
In our experiments, we have used the Dempster-
Shafer theory in fusion of two, three and four machine
learning classifier outputs in order to decrease the
weakness degrees. Hence, by using (2), the new mass
functions were then combined by Dempster-Shafer
rule (3) associating 2, 3 and 4 classifiers.
The decision was made by the pignistic risk (4)
and (5) that shows the performance of belief functions
in terms of error rate in test set. Obtained results are
summarized in Table 3, 4 and 5.
Table 3: Degrees of Accuracy and Weakness after
combining two classifiers.
Combined
Classifiers
Accuracy
Rate
Degrees of weakness
of fusion
MLP and KNN 97.37 % 2.63 %
MLP and RF 97.56 % 2.44 %
MLP and SVM 97.53 % 2.47 %
KNN and SVM 97.41 % 2.59 %
KNN and RF 97.44 % 2.56 %
SVM and RF 97.54 % 2.46 %
Table 4: Degrees of Accuracy and Weakness after
combining three classifiers.
Combined
Classifiers
Accuracy
Rate
Degrees of weakness
of fusion
MLP and SVM and
KNN
99.32 % 0.68 %
MLP and SVM and
RF
99.34 % 0.66 %
MLP and KNN and
RF
99.33% 0.67 %
SVM and KNN and
RF
99.33% 0.67%
Table 5: Degrees of Accuracy and weakness after
combining four classifiers.
Combined
Classifiers
Accuracy
Rate
Degrees of weakness
of fusion
MLP and SVM and
KNN and RF
99.85 % 0.15
As a conclusion, the results obtained from the
different confusion matrix of different classifiers
have shown that the accuracy of these algorithms is
excellent for predicting obligation traffic signs (keep
right, ahead only, turn right, turn left, keep left, go
straight or left) and good for some speed limit signs
(20 km/h, 70 km/h and 80km/h) but some problems
have appeared for identifying the other speed limit
traffic signs correctly.
In addition to that, we have shown that the
information fusion has the lowest error rate in
comparing with other classifiers. So, the accuracy
obtained using Dempster-Shafer theory in traffic sign
classification is better than that obtained using
machine learning classifiers independently.
5 CONCLUSION AND
PERSPECTIVES
Driving assistance systems can help drivers and
automatic driving systems to avoid the occurrence of
a dangerous situation that could lead to an accident,
Traffic Sign Recognition System based on Belief Functions Theory
779

free the driver from a number of tasks that could
reduce their vigilance and assist him in his perception
of the environment. Therefore, safety and reliability
validation of Advanced Driver Assistance Systems
(ADAS) is strongly recommended.
In this paper, we have proposed a methodology
based on Machine Learning algorithms and belief
functions theory to improve the performance of TSR
systems. We carried out a combinatorial study of
several classifier outputs in order to find the best
combination leading to this improvement. For this,
we have classified data into 15 sets based on
pictograms. Then, firstly, we have used machine
learning algorithms (MLP, SVM, RF and KNN) to
classify detected signs. Secondly, we have applied DS
theory by combining 2, 3 and 4 of the previous
classifiers. This methodology has given us better
results than using the different classifiers each one
apart.
As perspectives, we will extend our traffic sign
dataset by other classes in order to obtain a full French
traffic sign dataset then we would apply Dempster-
Shafer theory on deep learning algorithms and
compare obtained results with this work.
REFERENCES
Anusha, A., Renuka Devi, S.M., 2019. Automatic Speed-
Limit Sign Detection and Recognition for Advanced
Driver Assistance Systems. International Journal of
Innovative Technology and Exploring Engineering
(IJITEE) ISSN: 2278-3075, Volume-8, Issue- 9S2.
Dempster, A. P., 1967. Upper and lower probabilities
induced by a multivalued mapping. Annals of
Mathematical Statistics, vol. 38, pp. 325–339.
Ellahyani, A., El Ansari, M., El Jaafari, I., 2016. Traffic
sign detection and recognition based on random forests.
Appl Soft Comput 46:805–815.
Genevieve, S., Taif, A., Wasfy, B.M.,2019. Traffic Sign
Recognition Based on Multilayer Perceptron Using
DWT and DCT. IEEE 62
nd
International Midwest
Symposium on Circuits and Systems (MWSCAS)
Gomes, SL., Rebouças, ES, Neto EC., 2016. Embedded
real-time speed limit sign recognition using image
processing and machine learning techniques. The
Natural Computing Applications Forum.
Karthiga, PL., Mansoor, R., Kowsalya, J., 2016. Traffic-
sign recognition for an intelligent vehicle/driver
assistant system using HOG. Computer Science &
Engineering, An International Journal (CSEIJ), Vol.6,
No.1.
Ksantini, M., Ben Hassena, A., Delmote, F., 2017.
Comparaison and fusion of classifiers applied to a
medical diagnosis. 14th international Multi-
Conference on Systems, Signals & Devices.
Liu, Z., Pan, Q., Dezert, J., Han, J. W., He, Y., 2018.
Classifier fusion with contextual reliability evaluation,
IEEE Transactions on Cybernetics, Volume:
48, Issue:5.
Minary, P., Pichon, F., Mercier, D., Lefevre, E., Droit, B.,
2017. Face pixel detection using evidential calibration
and fusion, International Journal of Approximate
Reasoning, vol. 91, pp. 202–215.
Reinaldo, Natanael, M., Juara, I., S., Christnatalis, 2019.
Traffic sign detection using histogram of oriented
gradients and max margin object detection, Journal of
Physics : Conf. Series 1230 (2019) 012098.
Shafer, G., 1976. A mathematical theory of evidence.
Princeton University Press.
Thierry, D., 2019. Logistic Regression, Neural Networks
and Dempster-Shafer Theory: A New Perspective.
Knowledge-Based Systems, Elsevier, 176, pp.54-67.
Wahyono, W., Kang-Hyun, J., 2014. A Comparative Study
of Classification Methods for Traffic Signs
Recognition, IEEE International Conference on
Industrial Technology (ICIT), Busan, Korea
Xu, L., Krzyzak, A., Suen, C., 1992. Methods of combining
multiple classifiers and their applications to
handwriting recognition, IEEE Transactions on
Systems, Man and Cybernetics, vol. 22, no. 3, pp. 418–
435.
Xu, P., Davoine, F., Zha, H., Denœux, T., 2016. Evidential
calibration of binary SVM classifiers, International
Journal of Approximate Reasoning, vol. 72, pp. 55–70
Yager, RR., Liu, L., 2008. Classic Works of the Dempster
Shafer Theory of Belief Functions. Heidelberg,
Springer. 36.
Waymo Safety Report, 2017. On the road to fully self-
driving.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
780
