
Psychophysiological Modelling of Trust in Technology: Comparative
Analysis of Psychophysiological Signals
Ighoyota Ben Ajenaghughrure, Sónia Cláudia Da Costa Sousa and David Lamas
School of Digital Technologies, Tallinn University, Narva Mnt 25, 10120, Tallinn, Estonia
Keywords: Trust, Machine Learning, Psychophysiology, Autonomous Vehicle, Artificial Intelligence.
Abstract: Measuring users trust with psychophysiological signals during interaction (real-time) with autonomous
systems that incorporates artificial intelligence has been widely researched with several psychophysiological
signals. However, it is unclear what psychophysiological is most reliable for real-time trust assessment during
user’s interaction with an autonomous system. This study investigates what psychophysiological signal is
most suitable for assessing trust in real-time. A within-subject four condition experiment was implemented
with a virtual reality autonomous vehicle driving game that involved 31 carefully selected participants, while
electroencephalogram, electrodermal activity, eletrocardiogram, eye-tracking and facial electromyogram
psychophysiological signals were acquired. We applied hybrid feature selection methods on the features
extracted from the psychophysiological signals. Using training and testing datasets containing only the
resulting features from the feature selection methods, for each individual and multi-modal (combined)
psychophysiological signals, we trained and tested six stack ensemble trust classifier models. The results of
the model’s performance indicate that the EEG is most reliable, while the multimodal psychophysiological
signals remain promising.
1 INTRODUCTION
1.1 Motivation
Artificial intelligence technologies are becoming
more ubiquitous. As their applications and presence
cuts across a broad spectrum of activities and task in
modern societies (Siau, 2017).
For instance, autonomous vehicles (AV’s) have
been developed to transport people from one place to
another without human driver intervention in the civil
transportation industry. Besides, robot assisting
surgery (RAS) has been developed in the medical
sector to help surgeons carry out high precision
surgical procedures.
The emergence of AI technologies makes it
imperative to foster collaborative interaction between
users and AI based systems. This is due to the fact
that AI-based systems operate autonomously and
user’s delegates/take-over task/control to/from AI
based systems during interaction. For instance, users’
interactions with autonomous vehicles involve giving
over navigational control to the vehicle AI controller.
Also, doctors interact with RAS during surgical
procedures by giving over control of processes (e.g.,
surgical incision) to the RAS.
Prior efforts aimed at fostering users-AI-based
systems (e.g. AV) teaming utilized the principle of
traded controls that requires the driver to take control
in case of failure or limited capability over certain
conditions (also referred to as to as disengagement)
(Dixit et al., 2016). During this transition, user’s
timely, accurate and appropriate response is required.
However, without trust, such human technology
teaming is bound to fail. For instance, the Tesla AV
crash which led to the death of its driver was blamed
on the driver streaming video during the incident
(Beer et al., 2014).
The importance of trust is further emphasized in
the study conducted by Litman (2017), during which,
data from eight AV companies suggests that there are
more than one disengagement in every 5,600 miles an
AV travelled in 2017. Therefore as AVs’
disengagement is inevitable, so is the need for
successful users-AVs’ teaming, and this requires trust
between users and AVs’. Furthermore, trust between
users and AVs’ is influenced by prior failure
experience of AI algorithms that controls the AVs’.
This is further exacerbated by the fact that user’s lack
understanding of how AI algorithms that controls the
Ben Ajenaghughrure, I., Sousa, S. and Lamas, D.
Psychophysiological Modelling of Trust in Technology: Comparative Analysis of Psychophysiological Signals.
DOI: 10.5220/0010237701610173
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 2: HUCAPP, pages
161-173
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
161
AV operates, due to its design complexity (e.g. how,
when and why it decides to turn left or right)
(Parasuraman and Riley, 1997).
Hence, as Hurlburt (2017) quotes that ”any
tendency to put blind faith in what in effect remains
largely untrusted technology can lead to misleading
and sometimes dangerous conclusions”, there is no
doubt that trust will play a significant role in users
interactions with AI-based technologies (Gefen et al.,
2003; Li et al., 2008; Saiu et al., 2004). As trust has
been shown to influence users behaviour (e.g.,
reliance), perceived usefulness, pleasantness, and
overall acceptance of AI-based technologies such as
autonomous vehicles (Hergeth et al., 2016; Payre et
al., 2016; Rajaonah et al., 2006; Sollner & Leimeister
2013).
In order to foster users trust in AI-based systems
and enhance positive users experience, ensuring that
both user’s and AI technologies (AVs’) can jointly
plan, decide, or control a system (vehicle/device) by
sharing control is imminent (Abbink, et al., 2018).
Hence, some researchers suggest effective calibration
of users trust to avoid overtrust
1
or under trust
2
(Fallon et al., 2010; Hoffman et al., 2013; Lee & See
2004; Mirnig et al., 2016; Pop et al., 2015). Other
researchers suggests that making the AI-based system
explain” what, why and how it operates” to users
could enhance users trust (Glass et al., 2008; Pu &
Chen 2006). Although, Pieters (2011) suggests that
explanation should be provided until trust is
established, these approaches fail to address when
explanation should be provided.
However, since trust is dynamic and constantly
changes over time, calibration or explanation would
be most meaningful after effective assessment of
users trust levels in these AI based technologies (e.g.
AV’s) is achieved. However, measuring trust
continues to remain a challenge (Hurlburt, 2017). We
believe, this challenge should be first addressed
before moving onto what next after trust level is
accurately assessed.
The widely used self-reporting trust assessment
tools such as those develop by Gulati et al., (2019) are
not suitable in this context because they can only be
administered after interaction, The use of behavioural
data such as users decision to rely or not rely on AI-
based system during interaction are highly dependent
on the interaction, context and artefact. Hence leaving
the use of psychophysiological signal a viable method
for development of real-time trust assessment tools,
provided that the psychophysiological correlates of
trust is known.
Therefore, making it imperative to develop tools
that can assess users trust level in AI technologies
(AVs’) in real-time using psychophysiological
signals. A real-time trust assessment tool could
enable algorithms that AI controls technologies such
as AVs’ learn about users trust state and adapt its
operations accordingly (Ajenaghughrure et al., 2019).
As cognitive states (such as trust) can be used as
feedback to the system in order to correct mistakes or
inform the refinement of a learned control policy
(Perrin et al., 2011). A potential application of real-
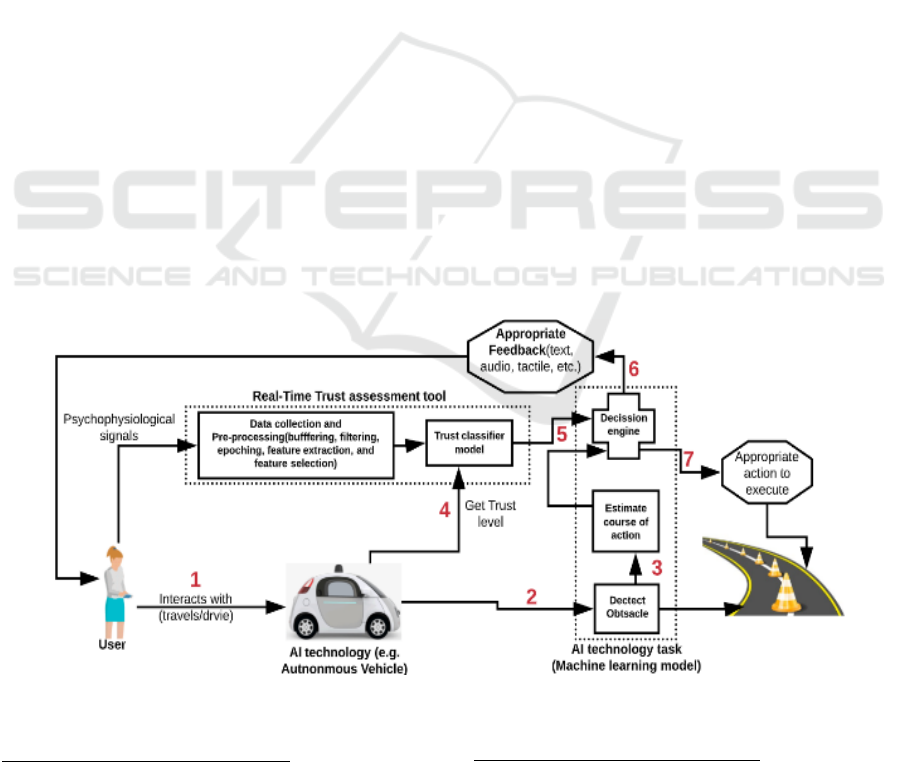
time trust assessment tool is presented in Fig. 1
Figure 1: Typical use-case of real-time trust assessment.
1
when a user trust a faulty or unreliable automated system
2
when a user does not trust a reliable or non-faulty automated
system
3
i.e biofeedback e.g. brain computer interface
applications
HUCAPP 2021 - 5th International Conference on Human Computer Interaction Theory and Applications
162

below, a user interacting with an autonomous vehicle
during a road trip-(1) the car detects an obstacle ahead
using its sensor data. (2) The car uses its inbuilt
machine learning model to determine its best
navigational strategy. (3) The users trust state is
assessed with the help of the trust classifier model that
received as input the users’ physiological signal data
(EEG) pre-processed in real-time. The car provides
the user with appropriate feedback–”e.g., when trust
is low: I understand that you are concerned about my
ability to drive you through the obstacle ahead
without involving in any crash, however I am 100%
capable of navigating the obstacle ahead without any
crash, kindly sit back and enjoy the ride”.
In addition, the same could be applied in the
context of e-commerce where users trust could be
measured during checkout and if found to be low,
appropriate feedback such as “hello we understand
that you are concerned about purchasing product xyz,
hence the merchant has agreed that you will not be
charge until you receive and use the product for six
months. If satisfied, then you will be charged.”
Further, in the context of doctors-RAS
interaction, a realtime trust assessment tool could
help foster cooperation between doctors and RAS
during surgical procedure (Shafiei, et al., 2018).
1.2 Problem Statement
Although the use of psychophysiological signals for
assessing users trust has been equally investigated by
quiet a number of researchers, the question of what
psychophysiological signal could be most reliable or
should multi-modal psychophysiological signals be
used to assess trust remains unattended.
Consequently, it is unclear which
psychophysiological signal is most reliable for
assessing users trust.
For instance, given that the psychophysiological
correlates of trust were found in multi-modal
psychophysiological signals such as the combination
of eye-tracking combined with ECG by
Leichtenstern et al., (2011), the psychophysiological
correlates of trust in single psychophysiological
signals has equally been found. For example, EEG
was used by Oh et al., (2017) and Wang et al., (2018).
Audio/voice and ECG was used by Elkins & Derrick
(2010) and Watz et al., (2014). Eye tracking was used
by Hergeth et al., (2016). However, it remains unclear
which psychophysiological signals correlates better
with users varying trust levels.
Furthermore, researchers investigating users trust
assessment in real-time (i.e., during interaction) using
single (electroencephalogram (EEG), functional near
infrared spectroscopy (FNIRS), and electrodermal
activity (EDA)) and multi-modal ( EEG+EDA,
audio/speech+ photoplethysmography + video )
psychophysiological signals has developed fairly
accurate classifier models that are capable of
detecting users trust state from psychophysiological
signals during interaction with AI-based systems.
(Ajenaghughrure et al., 2019; Hirshfield et al., 2011;
Shafiei et al., 2018; Lochner et al., 2019; Akash et
al., 2018; Hu et al., 2016;).
It also remains unclear what psychophysiological
signal is most suitable for developing real-time trust
assessment tools? Further reinforced by the fact that
there is dominance of features from one signal over
the other(s) in studies where multimodal
psychophysiological signals were utilized. For
instance, Hu et al., (2016), despite extracting 108
features from the psychophysiological signals (EEG
105, EDA 3), the model utilized more EEG features
(8) and less EDA features (2). Also, Akash et al.,
(2018), despite extracting 147 EEG features and 2
EDA features, both models (general and customized)
used more EEG features (11 and 10) than EDA
features (1 and 2). Furthermore, though the resulting
model developed by Khalid et al., (2018) utilized
features extracted (facial action code units,
photoplethysmography (video-heart rate),
audio/speech) from video and audio/speech
psychophysiological signals, no details of the
numbers of selected features per signal was provided.
1.3 Goals and Contribution
The goal of this study is to investigate what
psychophysiological signal is most suitable for
assessing users trust in real-time through developing
and comparing stack ensemble trust classifier
models, taking into account five psychophysiological
signals (EEG: electroencephalogram, ECG:
electrocardiogram, eye tracking, EDA:
electrocardiogram, and facial EMG:
electromyogram). These signals were considered
because they are have been used in prior studies. In
addition, we demonstrate the effectiveness of virtual
reality technique for eliciting users trust dynamics
during user’s interactions with AI technologies that
are otherwise expensive to acquire for conducting
user experience studies.
2 METHODOLOGY
Virtual reality offers both the opportunity to immerse
users in virtual environment where they experience
products synonymously to real-world and the ability
to assess user’s experience (e.g., cognitive states such
Psychophysiological Modelling of Trust in Technology: Comparative Analysis of Psychophysiological Signals
163

as trust and/or effective states such as emotions)
(Rebelo et al., 2012).
Therefore, following game theoretic approach
similar to prior research investigating trust
(Ajenaghughrure et al., 2019), we developed an
autonomous vehicle (AV) driving game. The game
affords participants the opportunity to experience an
AV under four categories of risk conditions that are
directly mapped onto the automotive safety integrity
levels (ASIL), also known as ISO-26262.
Elicitation of varying levels of risk through the
game was motivated by the fact that risk is one (1) of
the main factors that influences users’ trust in
technology (Gulati et al., 2019). ASIL classifies the
inherent safety in automotive systems into four
categories (A,B,C,D) based on the combination of
severity of accident, likelihood of accident and
exposure to accident (i.e. ASIL = Severity ∗ (
Exposure ∗ Likelihood )) (Kinney and Wiruth, 1976).
Hence, a within subject 4 condition (very-high
risk, high risk, low risk, no risk) experiment design
was implemented as a game that tasked participants
to stay safe. During the game, we captured
participants trust dynamics through recording
participants psychophysiological responses (EEG,
EDA, ECG, facial EMG and eye tracking signals)
during interactions with the AI technology (a
simulated AV game) under various risk conditions.
2.1 Apparatus
Hardware: An MSI core i7 high performance
gaming computer was used for the experiment. In
addition, a 30inch LCD monitor was used to enhance
visual display. Also, a Keyboard and mouse was
provided to allow participants complete the trust in
technology questionnaire (Gulati et al., 2019). In
addition, a joystick was provided to participants to
enable them to control the car when needed.
Software: Lab-stream layer software was used for
aggregated recording of event markers from the game
and all other psycho-physiological signals (EEG,
ECG, EMG (facial) and EDA) into a single file in xdf
format. In addition, using unity and C# programming
language, we developed a hybrid fully autonomous
vehicle (AV) driving game. More details about the
game is described in (Ajenaghughrure et al., 2020).
Also, Google hangout video call session running on a
computer equipped with high definition camera
installed in the experiment room was used to enable
remote monitoring of participants during the
experiment.
2.2 Participants
Invitation was sent through university mailing list,
and printed handbills, with the help of an assistant.
Upon acceptance of the invitation, participants
were asked to complete a google form to help us
ascertain that each participant are right handed, free
from any health condition that prevents them from
driving, and are at least 18years and above. All
participants that satisfied the above criteria were
administered the driving habit questionnaire (DHQ)
and behavioural inhibition / behavioural activation
system questionnaire (BIS/BAS). Finally, only thirty
one (31) healthy and right-handed participants
(26.7% female, 73.3% male) aged 18 and above (M=
27.93333333, SD=5.607466287) participated in this
study. This age range was considered based on prior
studies which did not find any significant difference
in psychophysiological responses when user aged 18
and above exhibit varying trust behaviour (Lemmers-
Jansen et al., 2017). Furthermore, based on the
responses recorded from the DHQ and BIS/BAS
questionnaire (Owsley et al., 1999; Carver and White
1994), all participants had prior driving experience
and symmetric personality traits with high BIS and
BAS score (mean BIS>=2.5, mean BAS>=2.5, BIS
score>=19, BAS score >= 40). In addition, order
effect was avoided by grouping participants into two
equal groups, each group is assigned to the four main
game condition in reverse order.
2.2.1 Experiment Procedure
Upon arrival, participants were introduced to the
experiment as a game involving test riding a
prototype fully autonomous SUV vehicle intended for
the future. Thereafter, participants completed and
sign the informed consent form.
After that, an 8-channel wireless EEG recorder
(G.tech Gmbh Austria.) was affixed to participants
scalp. In addition, using bitalino wireless bio-signal
acquisition systems, we affixed EDA sensor
electrodes (2) to participants left hand palm area,
EMG sensor electrodes (3) were placed on
participants left and right eye sides to obtain
horizontal EOG (Electrooculography), ECG sensor
electrodes were placed on participant chest (left and
right collar bone, and below the left chest area). Also,
eye tracking data calibration with Miramatrix eye
tracker was performed.
Thereafter, participants played the test game session
to acquaint themselves to the available joystick
(Logitech 3D Pro) controls that applies to the
autonomous vehicle without any obstacles. At the end
HUCAPP 2021 - 5th International Conference on Human Computer Interaction Theory and Applications
164
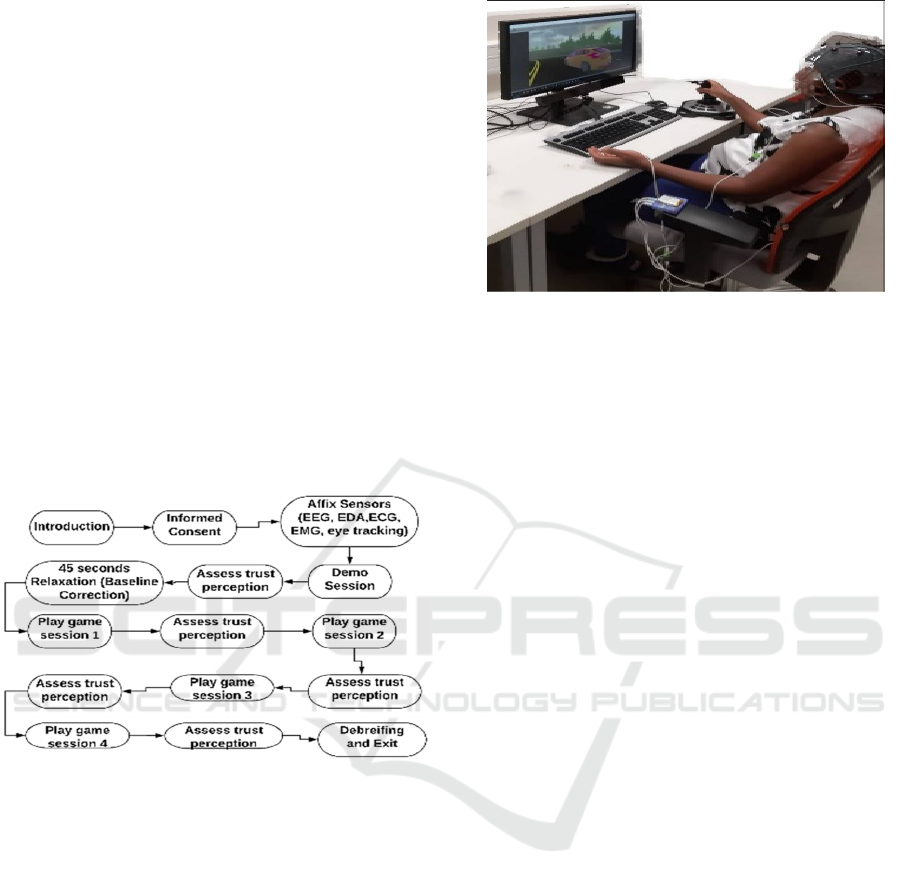
of the demo game session, participants completed the
trust in technology questionnaire adopted from Gulati
et al., (2019) to obtain participants initial trust levels.
This is followed with a 45seconds (game sessions
loading time) relaxation acting as a baseline
correction for the psychophysiological signals being
recorded. After that, the experimenter exits the
experiment room as participants began the main game
session. After completing a game session (i.e. 13
trials), participants completed the trust in technology
questionnaire adapted from Gulati et al., ( 2019) to
obtain participants trust perception. In addition, the
game logs consist of participants trust related
behaviour (number of times AI was relied upon vs
number of times joystick was relied upon). After
completing the four game sessions, all
psychophysiological sensors were removed following
vendor guidelines. Finally, participants were
debriefed and thanked with a gift card voucher worth
10EUR irrespective of the final score obtained at the
end of the game (<75 or >=75points).
Figure 2: Experiment Procedure.
2.3 Data Collection and Pre-processing
Multimodal psychophysiological signals were
recorded using labstream layer software and API for
the respective physiological sensors.
The continuous EEG data was recorded using a
wireless 8channel (Cz, Fz, C3, C4, F3, F4, P7 and P8
based on 10-20system) electrode amplifier from
G.Tech Gmbh Austria. The sampling rate was 250Hz
and impedance was <20kohm. Electrolyte gel was
applied to each electrode to ensure proper
conductivity and data quality. In addition, we used
75% metabolic spirit fluid to wipe the right ear lobe
before affixing the ground electrode. Low pass filter
of 120hz, high pass filter of 0.10Hz and notch filter
of 50hz were used to remove sharp spikes, low-
frequency drift noise and high-frequency sinusoidal
power line noise respectively. The ground reference
electrode was placed on the right earlobe, in addition
to common ground.
Figure 3: Participant during experiment.
Also, the continuous ECG, EDA and Facial-EMG
signals were recorded at a sampling rate of 1000hz.
The EDA signals were acquired with two (2) gel
prefilled electrodes that were placed on the left palm
area of participant’s. Using ledalad software, the
EDA signals were: down-sampled to 50hz to reduce
the computation cost (time) and denoised using
adaptive smoothing to remove noise related with
movements (Benedek and Kaernbach 2010).
In addition, the facial EMG signals were acquired
with three gel prefilled electrodes attached to the left
and right eye sides, and above the left eye brow, to
obtain horizontal EOG signals. In addition, hand
sanitizer applied to wipes were first used to wipe the
areas before affixing the facial EMG prefilled gel
electrodes.
Further, the ECG signals were acquired with three
gel prefilled electrodes that were placed on the left
(black electrode) shoulder, right shoulder (white
electrode) and below the left chest (red electrode)
area. In addition, hand sanitizer applied to wipes were
first used to wipe the areas before affixing the ECG
prefilled gel electrodes. Also, the ECG signals were
downsampled to 50hz to reduce the computation cost
(time) and filtered using neurokit python library
(Makowski, 2016).
Furthermore, participants trust perception was
measured subjectively using the trust in technology
questionnaire adopted from Gulati et al., (2019). It
consists of fourteen (14) items (question measuring
risk perception, general trust, benevolence,
reciprocity, and competence) measured on a scale of
one (1) to five (5). Participants trust score was
obtained by summing up the total response. This
instrument was chosen because of its empirical
nature.
In addition, participants non reliance (i.e., take-
over: disengagement of AI control to manual control)
on the AV was measured by aggregating the total
joystick activation (0=not moved, 1=moved)
Psychophysiological Modelling of Trust in Technology: Comparative Analysis of Psychophysiological Signals
165
beginning from the onset of an obstacle until an
obstacle is past for all 52 trials.
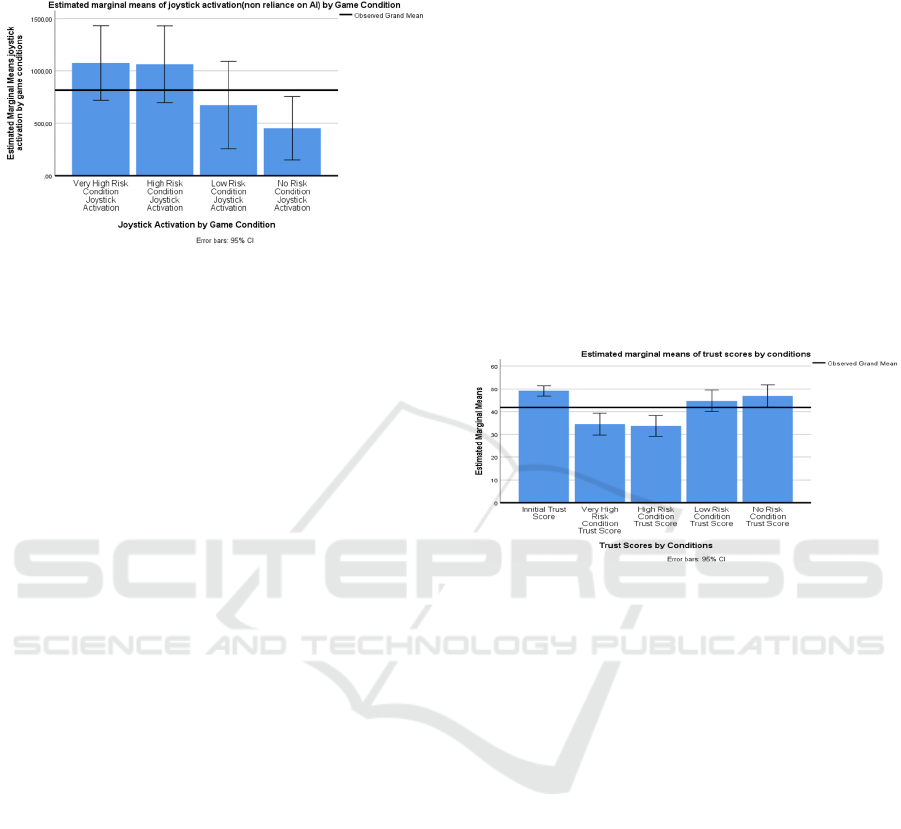
Figure 4: User non-reliance (joystick activation).
3 DATA ANALYSIS
3.1 Subjective Trust Perception and
Objective Behavioural Trust
Assessment
The result of the one way repeated measure ANOVA
performed on the trust scores obtained from the
participants before the playing the game and after
playing each game sessions revealed that users trust
before beginning the game (initial trust) was higher
with statistical significant difference when compared
to users trust during the very high risk and high risk
game session were lower (difference in mean trust
score 14,581 and 15,355 respectively, sig (0.00)
<0.05). Further, although users trust before beginning
the game (initial trust) was higher but was not
statistically significant when compared to users trust
during the low risk and no risk game session
(difference in mean trust score
4,355
and
2,226
respectively, sig (
0.220 and 1.00
)>0.05 respectively).
In addition, users trust during the high risk game
session is lower with statistical significant difference
when compared to users trust during the low risk and
no risk game session (Mean difference -11,000 and -
13,129 respectively, sig (0.001) <0.05). Also, users
trust during the very high risk game session is lower
with statistical significant difference when compared
to users trust during the low risk and no risk game
session (difference in mean trust score -12,355 and -
13,129 respectively, sig (0.001) <0.05).
However, there was no statistical significant
difference between users trust during the very high
risk and high risk game session. Same applies to the
low risk and no risk game session.
Furthermore, users non-reliance (joystick usage)
during the very high risk and high risk game session
were higher with statistical significant difference
when compared to user non-reliance (joystick usage)
during the no risk game session (difference in mean
trust score 624,258 and 612,742 respectively, sig
(0.002 and 0.000 respectively) <0.05). Also, though
users non-reliance (joystick usage) during the very
high risk and high risk game session are higher when
compared to users non-reliance (joystick usage)
during the low risk game session (difference in mean
trust score 402,129 and 390,613 respectively, sig
(0.320 and 0.138) <0.05), it was not statistically
significance, probably because users do not
differentiate risk as low or high but present or absent.
These results suggests perceived risk during
interaction with autonomous technologies influences
users trust and overall reliance on autonomous
technologies. In particular as risk increases trust and
overall reliance decreases. Thereby reinforcing the
need for real-time trust assessment tools.
Figure 5: Users trust by game sessions.
3.2 Feature Extraction
The continuous EEG, EDA, ECG, eye tracking and
facial EMG data were first divided into 4s epoch.
Each epoch begins from the obstacle onset and ends
4s after. This time window was chosen because the
average response time (i.e. the time from obstacle
onset until first joystick movement) in cases where
participants trust was low was four (4) seconds. Each
epoch was labelled as high trust (coded as 2, if the
joystick was not used during a trial) or low trust
(coded as 1: if the joystick was used during a trial).
3.2.1 EEG
Using customised python script implementing python
libraries from Python MNE (Gramfort et al., 2013)
and MNE-feature extraction (Schiratti, et al., 2018),
we extracted 160 exhaustive features from both time
and frequency domain. The time domain features
extracted for each EEG channel(i.e. 8 times 10) are
the mean, variance, kurtosis, peak to peak amplitude
(ptp amp), skewness, standard deviation (std),
spectral entropy (spect entropy), singular value
decomposition fisher information (svd fisher info),
singular value decomposition entropy (svd entropy)
HUCAPP 2021 - 5th International Conference on Human Computer Interaction Theory and Applications
166

and decorrelation time (decorr time). Further, the
frequency domain features extracted from five
frequency bands (alpha. beta, theta, gamma and delta)
and each channel (i.e. 5 times 8 times 2) are the power
spectrum (pow freq bands) and the band energy
(energy freq bands). However, Only 30 participants
data were included for further analysis, as one
participants EEG epoch data were too noisy
rendering all its epoch data invalid.
3.2.2 Facial EMG
Mean and peak to peak amplitude features were
extracted from all 31 participants epoch facial-emg
data using a customized python script implemented
with python MNE libraries and MNE-feature
libraries (Gramfort et al. 2013; Schiratti, et al., 2018
). Therefore only two features were extracted from
the facial EMG signal.
3.2.3 EDA
Using mathlab and ledlab software (Beer &
Kaernbach, 2014), we extracted 12 EDA features
from all 31 participants epoch and pre-processed
EDA signals. Amongst which includes seven
continuous phasic/tonic features using continuous
decomposition analysis (CDA) based on standard
deconvolution, three standard trough-to-peak (TTP)
features, and two global measures (see Beer &
Kaernbach, (2014), for detailed description of the
features)
3.2.4 Eye Tracking
All 31 participants epoch eye tracking data were
further pre-processed for feature extraction by
computing the mean of each default features provided
by the open-eye api (Hennessey & Duchowski,
2010). Therefore, the mean of each of the forty
features outlined provided by the openeye api were
computed (Hennessey & Duchowski, 2010).
3.2.5 ECG
Using customized python script implementing
neurokit library (Makowski, 2016), we extracted
three features (clean raw ecg, ecg rate, and ecg peak)
from the epoch ECG psychophysiological signal data
(aggregated from all 31 participants).
3.3 Ensemble Trust Classifier Model
Based on previous study (Ajenaghughrure et al.,
2020), we selected five most promising algorithms
(multi-layer perception (MLP), linear support vector
machine (LSVM), regularised support vector
machine algorithm (RBF-SVM), linear discriminant
analysis algorithm (LDA), quadratic discriminant
analysis algorithm (QDA)). These algorithms offers
diverse characteristics that compliments the
limitation of one another, thereby reducing the
resulting classifier model biases and increasing its
generalizability. Also, these algorithms has been
successfully applied in brain computer interface
research previously (Lotte et al., 2007). Our
implementation of the ensemble trust classifier model
was therefore achieved by combining all five
algorithms through a technique known as classifier
stack ensemble method (Lotte et al., 2007; Pedregosa
et al., 2011). Ensemble of several algorithms aims to
reduce classification error as suggested by prior
research (Ajenaghughrure et al., 2019; Hu et al.,
2016). Also, stack ensemble method was preferred
over all other method because prior study has
demonstrated that it is most superior when compared
to other ensemble methods (e.g. voting, bagging,
boosting) and unsupervised method such as deep
neural network (Ajenaghughrure et al., 2020).
3.4 Feature Selection
We used hybrid feature selection method to select
features from each individual and combined (multi-
modal) psychophysiological signal epoch data-sets
(i.e. EEG, EDA, ECG, EMG, and eye tracking). The
choice of hybrid feature selection method was
informed by prior study which has demonstrated that
the resulting features from such method yields the
most optimum ensemble trust classifier model
performance (Ajenaghughrure et al., 2020). Hybrid
feature selection method entails the combination of
different feature selection method (e.g. filter and
wrapper method).
The hybrid feature selection process applied to
each individual and combined psychophysiological
signal is detailed as follows: (1) Divide the epoch data
samples into training and test samples (80% and 20%
respectively). (2) Apply relieff filter feature selection
method on subset of the training data sample, to
identify model independent features. Relieff is an
automated process that has been successfully applied
in previous trust studies (Hu et al., 2016). Our
implementation of the relieff feature selection
method was achieved through a customised python
script that implemented the relieff algorithm python
library (Urbanowicz, et al., 2018). (3) Obtain model
dependent features that promises optimum
performance of the trust classifier model by applying
wrapper feature selection (sequential forward
floating feature selection method (SFFFS)) method
on the subsets of the training samples containing only
features obtained from step2. Our implementation of
the wrapper feature selection method was achieved
Psychophysiological Modelling of Trust in Technology: Comparative Analysis of Psychophysiological Signals
167

through a customised python script that implemented
mlxtend python library (Raschka et al., 2018). This
method evaluates our stack ensemble trust classifier
model performance on various combinations of the
model independent features to identify the most
relevant feature for the specific model.
3.4.1 Multi-modal Psychophysiological
Signal Feature Selection
The entire epoch multi-modal psychophysiological
data (aggregated from 30 participants one participant
EEG data epochs was corrupted.) containing 217
feature vector was first subjected to step1. Thereafter,
step2 was applied on subset of the training epoch data
(multi-modal psychophysiological signals) samples,
and this process identified 30 model independent
feature vectors (Urbanowicz, et al., 2018).
Furthermore, applying step3 to subsets of the training
epoch data (multi-modal psychophysiological
signals) samples containing only features selected in
step2 identified 14 relevant model dependent features
that promises the utmost performance of the trust
classifier model. Amongst which include: the global
mean of the EDA signal, svd entropy from four EEG
channels (c3, c4, f3, cz), svd fisher info from four
EEG channels (c3, p7, f3 and cz), skewness from two
EEG channels (p7 and cz), gamma power frequency
band from EEG channel f3 and gamma energy
frequency bands from two EEG channels (p8, and
c3).
3.4.2 EEG
After excluding one participant data due to bad
epochs, we applied step1 to the epoch EEG data
samples containing 160 features. Thereafter, we
applied step2 to subsets of the training epoch data
(EEG) samples which resulted to top 15 model
independent features being selected. Furthermore, we
applied step3 to subsets of the training epoch data
(EEG) samples containing 15 features selected in
step2. The result of step3 is 10 model dependent
features that promises optimum performance of the
trust classifier model. The feature selected are the
gamma energy frequency bands from two EEG
channels (cz and c4), svd fisher info from six EEG
channel (p7, p8, f3, f4, c3, c4), and svd entropy from
two EEG channels (p6 and c4).
3.4.3 ECG
The epoch ECG psychophysiological signal data
(aggregated from all 31 participants) samples
containing all three features were first subjected to
step1. Thereafter, we applied step2 to subset of the
training epoch data (ECG) samples. The result of
step2 is the selection of the top 2 model independent
features. Furthermore, step3 was applied to subset of
the training epoch data (ECG) samples containing
only the two features selected in step2. This resulted
to selecting only one model dependent feature (i.e.,
the clean raw epoch ECG signal) that promises
utmost model performance.
3.4.4 EDA
Step1 was first applied to the epoch EDA
psychophysiological signal data samples (aggregated
from all 31 participants) containing the twelve
features we extracted, and subset of the training
epoch data (EDA) samples were further subjected to
step2 process. The result of step2 is five model
independent features selected. Furthermore, we
applied step3 on subset of the training epoch data
(EDA) samples containing only the five features
sleeted in step2. The result of step3 is four model
dependent features, amongst which includes: two
CDA features (CDA.nSCR: Number of significant
skin conductance response within response window
(wrw), and CDA.Tonic: Mean tonic activity wrw of
decomposed tonic component), one standard trough
to peak feature (TTP.nSCR:Number of significant
skin conductance response within response window
(wrw)) and one global measure feature
(Global.MaxDeflection: Maximum positive
deflection wrw).
3.4.5 EMG
Step1 was applied to the epoch EMG
psychophysiological signal data (aggregated from all
31 participants) containing the two feature extracted
and further subjected to step2 which utilizes subset of
the training epoch data (EMG) samples. The result of
step3 are two model dependent features (mean, and
peak-to-peak amplitude). Here we skipped step2
because we had extracted only two features.
3.4.6 Eye Tracking
Step1 was applied to epoch eye tracking
psychophysiological signals data (aggregated from
all 31 participants) samples containing the forty
feature vectors and subset of the training epoch
data(eye tracking) samples were further subjected to
step2 process which selected seven model
independent features. Furthermore, we applied step3
to subset of the training epoch data samples
containing only the seven model independent features
and this resulted to six model dependent features
(RPUPILD: float right eye pupil diameter (mm),
RPV: right eye pupil image valid, FPOGID: fixation
number, REYEX: right eye position in X -left/+right
HUCAPP 2021 - 5th International Conference on Human Computer Interaction Theory and Applications
168

(cm), CS: cursor button state, RPOGV: right point-
of-gaze valid) that promises optimum performance of
the trust classifier model.
3.5 Model Training and Validation
Using each psychophysiological signals (individual
signals and multimodal signal) training data-sets
(80%) containing the final features selected with
SFFS method, we trained six stack ensemble trust
classifier model outlined below:
The first stack ensemble trust classifier model
(V1) was trained with training data sets that
consists of only multi-modal
psychophysiological signals selected features.
The second stack ensemble trust classifier
model (V2) was trained with training data sets
that consists of only EEG psychophysiological
signal selected features.
The third stack ensemble trust classifier model
(V3) was trained with training data sets that
consists of only eye tracking
psychophysiological signal selected features.
The fourth stack ensemble trust classifier
model (V4) was trained with training data sets
that consists of only EDA psychophysiological
signals selected features.
The five stack ensemble trust classifier model
(V5) was trained with training data sets that
consists of only ECG psychophysiological
signals selected features.
The sixth stack ensemble trust classifier model
(V6) was trained with training data sets that
consists of only facial-EMG
psychophysiological signal selected features.
Each model was trained using the stratified three-fold
cross validation method. This method first divides the
training data (80% of the entire data samples) into
specified partitions (three in this case) containing
equal percentage of each class samples, then trains
the given model on some data partition(given
partition minus one, i.e. two) and evaluates the given
model on the reserved data partition
The results of each model performance (accuracy
minimum, maximum, and mean) based on the cross
validation is outlined in table 1.
The stack ensemble trust classifier model V1
achieved an accuracy of 78.4% (minimum) for some
samples, while for other samples, it achieved an
accuracy of 82.0%. Also, its mean accuracy is 80.0%.
Also, the stack ensemble trust classifier model V2
achieved an accuracy of 80.4% (minimum) for some
samples, while for other samples, it achieved an
accuracy of 87.8%. Also, its mean accuracy is 83.4%.
In addition, the stack ensemble trust classifier
model V3 achieved an accuracy of 50.2% (minimum)
for some samples, while for other samples, it
achieved an accuracy of 57.6%. Also, its mean
accuracy is 53.9%. Also, the stack ensemble trust
classifier model V2 achieved an accuracy of 51.0%
(minimum) for some samples, while for other
samples, it achieved an accuracy of 58.8%. Also, its
mean accuracy is 54.8%.
Furthermore, the stack ensemble trust classifier
model V2 achieved an accuracy of 51.4% (minimum)
for some samples, while for other samples, it
achieved an accuracy of 53.4%. Also, its mean
accuracy is 52.0%. Also, the stack ensemble trust
classifier model V2 achieved an accuracy of 59.2%
(minimum) for some samples, while for other
samples, it achieved an accuracy of 64.9%. Also, its
mean accuracy is 61.8%.
Therefor these results suggest that all the
ensemble trust classifier models, irrespective of the
psychophysiological signal utilized during their
development, are stable. Considering that the
minimum accuracy’s ranges from 50.2% to 80.4%,
the maximum accuracy’s ranges between 53.9% to
82.9%, and the mean accuracy’s ranges from 53.4%
to 87.8%. Also, no model had accuracy below 50%
for any given sample.
However, with regards to performance, the
stacked ensemble trust classifier model (V2)
developed with EEG psychophysiological signal
attained the most performance. The stack ensemble
trust classifier model (V1) developed with multi-
modal psychophysiological signals attained the
second most optimum performance.
With regards to all other stacked ensemble trust
classifier models (V3, V4, V5, V6), the model (V6)
developed with facial-EMG psychophysiological
signal is the next most optimum model, followed by
the model (V4) developed with EDA
psychophysiological signal, and next is the model
(V3) developed with eye tracking
psychophysiological signal. The least optimum is the
model (V5) developed with ECG
psychophysiological signal.
The implication of these results is that EEG is the
most relevant psychophysiological signals for
assessing trust. While multimodal
psychophysiological signal is equally promising, but
more research is still required. In addition, facial
EMG is equally a promising psychophysiological
signal for assessing trust. However, the performance
of both EDA, ECG, and eye tracking
psychophysiological signals were not too
encouraging.
Psychophysiological Modelling of Trust in Technology: Comparative Analysis of Psychophysiological Signals
169
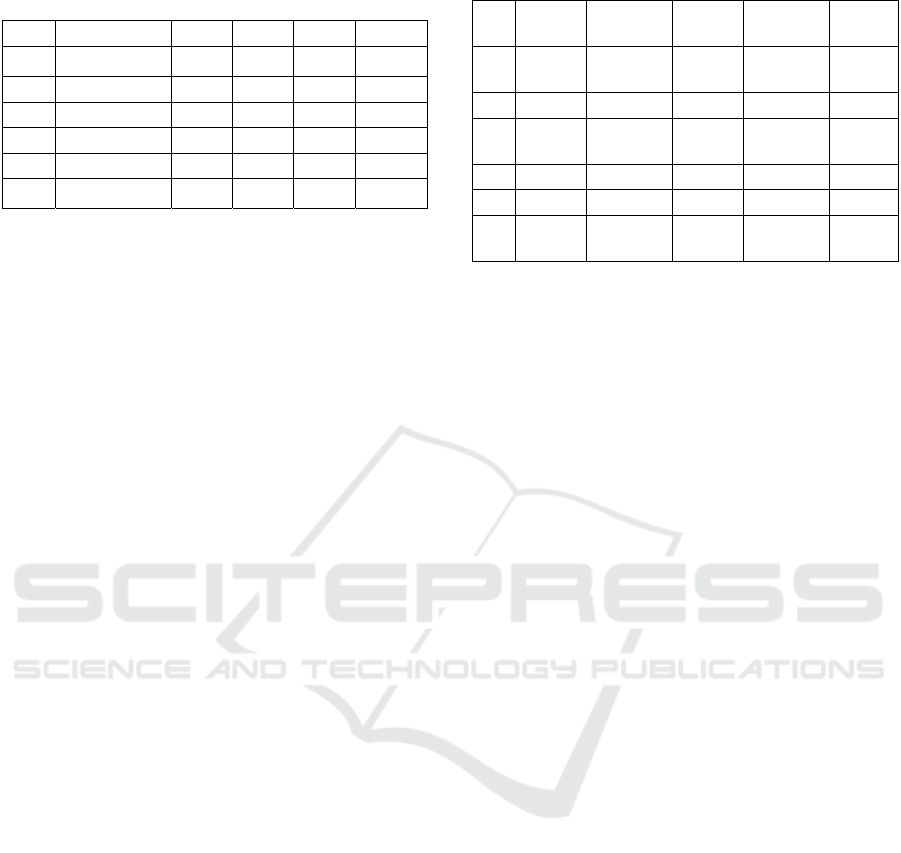
Table 1: Models CV performance (Accuracy(%) minimum.
maximum, mean).
SN Model Mean Min Max Stabilit
y
1 Multimodal 0.800 0.784 0.820 0.036
2 EEG 0.834 0.804 0.878 0.074
3 Eye-Tracking 0.539 0.502 0.576 0.074
4 EDA 0.548 0.510 0.588 0.078
5 ECG 0.520 0.514 0.534 0.02
6 Facial EMG 0.618 0.592 0.649 0.057
3.6 Model Validation/ Evaluation
Considering that the validation during cross
validation and training could have some leaked data
samples present in both the validation and training
data partitions, and consequently results to model
over-fitting as argued by some scholars (Lotte et al.,
2007). Therefore, we further tested each ensemble
trust classifier model with reserved test data (i.e. 20%
of the entire data samples).
As outlined in table 2 below, the stack ensemble
trust classifier model (V1 and V2) developed with
multi-modal psychophysiological signals and EEG
psychophysiological signal yielded the most
optimum performance (accuracy 80.5% and 79.8%
respectively). However, the performance difference
(0.7%) between both models (V1 and V2) is quiet
low. Furthermore, the stack ensemble trust classifier
model (V6) developed with Facial EMG
psychophysiological signals is the next most
performing model with an accuracy of 61.6%.
In addition, the stack ensemble trust classifier
models (V4 and V5) developed with EDA and ECG
psychophysiological signals performance(accuracy
56.7% and 56.5% respectively) were below the
performance of the stack ensemble trust classifier
models(V1, and V2) developed with EEG and
multimodal psychophysiological signal. Although,
the stack ensemble trust classifier models(V4 and
V5) developed with ECG and EDA
psychophysiological signals appears to be more
promising than the stack ensemble trust classifier
model developed with eye tracking
psychophysiological signal which attained 55.4%, all
three models performance are poor in comparison to
the models developed with EEG and multi-modal
psychophysiological signals.
Therefore these results implies that EEG and
multimodal psychophysiological signals are the most
reliable psychophysiological signals for developing
stacking ensemble models for assessing users trust
during interaction with technology. Although, facial
EMG seems promising, there is still room for more
research using facial EMG, in order to understand its
scope better. Also,
Table 2: Models test performance.
SN Models Accuracy Recall Precision
ROC-
AUC
1 Multim
odal
0.805 0.805 0.843 0.805
2 EEG 0.798 0.787 0.846 0.800
3 Eye
trackin
g
0.554 0.948 0.563 0.493
4 EDA 0.567 1.000 0.567 0.500
5 ECG 0.565 1.000 0.565 0.500
6 Facial
EMG
0.616 0.954 0.601 0.563
3.7 Discussion and Implication for HCI
Researchers Investigating Trust
The results of this study clearly identified EEG
psychophysiological signal as the most reliable
psychophysiological signal for assessing users trust
in technology. Although this result is reinforced by
the fact that the trust classifier model (V2) developed
with EEG psychophysiological signal outperformed
the other models (v3, v4, v5, v6) developed with
other psychophysiological signals, the
comprehensive review by the authors in
(Ajenaghughrure et al, 2020) identified EEG as the
most frequently used psychophysiological signals in
studies assessing trust with psychophysiological
signals. One reason for this result could be because
EEG has high temporal resolution, compared to the
other psychophysiological signals.
In addition, the models (v3,v4,v5,v6) developed
with the other psychophysiological signals (eye
tracking, ECG, EDA, facial-EMG) performing
poorly could be as a result of the data epoch time
window (4s) that was chosen based on the average
response time in this study, and the context being a
time sensitive context. Probably when longer epoch
time window is used in other context (e.g. e-
commerce) that are not time sensitive, these other
psychophysiological signals could perform better.
Therefore, future research could examine epoch
duration. Hence the result of this study is not entirely
applicably across all technical artefact context, but
subject to further investigation.
Furthermore, though the model (v1) developed
with multimodal psychophysiological signal
outperforms the model (v2) developed with EEG
signal during validation, it is worth pointing out the
majority of the selected features in the multimodal
model (v1) are EEG psychophysiological signal
features, and just a single EDA psychophysiological
signal feature was selected. This leaves an important
question on why such occurrence, and how best to
perform feature selection for multi-modal
HUCAPP 2021 - 5th International Conference on Human Computer Interaction Theory and Applications
170

psychophysiological signals. Hence, the subject of
multimodal psychophysiological for assessing trust
remain largely unclear and requires further
investigation.
Further, like prior studies, we have performed an
offline model development and evaluation. However,
it is unclear how these models will perform when
applied in real-time context.
In addition, though the maximum accuracy
reported in this study and most prior studies _+/- 80%
or more, therefore, when these models are deployed
in realtime context with adaptive feedback based on
users trust important questions about how wrongly
estimated trust level and corresponding feedback
would affect users trust and overall experience would
emerge.
Although, the current study result suggests EEG
is most optimum, the implementation of AV’s has
neither explored the current concept of real-time trust
assessment with adaptive feedback. Hence, another
important dimension that future research could
examine is the application of real-time trust
assessment with adaptive feedback in the wild.
Though EEG systems are available in various form
factors with cost ranging from less a 100USD to
several thousands, dealing with noise and other
physical activity that could impair the signal quality
is another issue that future research must address. In
addition to exploring non-invasive signals such as
voice/audio.
The significance of this study result for future
HCI researchers and designers investigating realtime
trust assessment in AI-based systems is in the aspect
of eliciting and informing the choice of
psychophysiological signal to utilize during the
development of a trust state classifier model that can
automatically classify users trust state (users
experience) based on psychophysiological signals.
Our result generally shows that it is feasible to assess
users trust state during interaction (real-time) with an
autonomous system and the most reliable signal to
use at the moment is EEG.
4 CONCLUSION
In conclusion, a user study involving autonomous
vehicle in virtual. In addition, as we transition into the
era of AI technologies, creating a symbiotic
interactive atmosphere that guarantees successful
user’s technologies (e.g. AV’s) teaming is
imperative. Hence, trust researchers have attempted
the development of ensemble trust classifier models
that can assess users trust in technology during
interaction from psychophysiology.
However, due to the fact that there are plethora of
psychophysiological signals, the choice of what
psychophysiological signals to employ when
developing real-time trust assessment tools and its
dependent components such as trust classifier
models, is solely researchers discretion.
Consequently, it is unclear what psychophysiological
signal is most reliable for assessing users trust during
interaction with AI-based systems (e.g., AV).
Hence motivating this study which investigated
what psychophysiological signal is most reliable for
assessing trust. The results of six ensemble trust
classifier models we developed with individual (i.e.
EEG. ECG, EDA, facial EMG, eye tracking) and
multimodal psychophysiological signal features
extracted through hybrid feature selection methods.
The result indicates that the EEG and multimodal
psychophysiological signal led to the most optimum
ensemble trust classifier models (V2, and V1).
Although these results are obtained in offline
model development and evaluation mode, future
research will examine the model performance in real-
time mode. Depending on how successful this
becomes a new research line inquiring into the
direction of identifying relevant feedback modalities.
ACKNOWLEDGEMENTS
This research was supported by Tallinn University
research fund project-F/5019, Estonia Research
Council grant PUT1518and the European Union
Horizon 2020 research and innovation program under
the NGITRUST grant agreement no 825618.
REFERENCES
Abbink, D. A., Carlson, T., Mulder, M., de Winter, J. C.,
Aminravan, F., Gibo, T. L., & Boer, E. R. (2018). A
topology of shared control systems—finding common
ground in diversity. IEEE Transactions on Human-
Machine Systems, 48(5), 509-525.
Ajenaghughrure, I. B., da Costa Sousa, S. C., & Lamas, D.
(2020, June). Risk and Trust in artificial intelligence
technologies: A case study of Autonomous Vehicles. In
2020 13th International Conference on Human System
Interaction (HSI) (pp. 118-123). IEEE.
Ajenaghughrure, I. B., Sousa, S. C., Kosunen, I. J., &
Lamas, D. (2019, November). Predictive model to
assess user trust: a psycho-physiological approach. In
Proceedings of the 10th Indian Conference on Human-
Computer Interaction (pp. 1-10).
Ajenaghughrure, I. B., Sousa, S. D. C., & Lamas, D. (2020).
Measuring Trust with Psychophysiological Signals: A
Systematic Mapping Study of Approaches Used.
Multimodal Technologies and Interaction, 4(3), 63.
Psychophysiological Modelling of Trust in Technology: Comparative Analysis of Psychophysiological Signals
171

Ajenaghughrure, I. B., Sousa, S., and Lamas, D. (2020)
Psychphysiological modelling of trust in technology:
Comparative analysis of algorithm ensemble methods,
IEEE SAMI 2021 (accepted)
Ajenaghughrure, I. B., Sousa, S., and Lamas. D. (2020)
Psychophysiological modeling of trust in technology:
The influence of feature selection methods. 13TH EICS
PACM journal (accepted)
Akash, K., Hu, W. L., Jain, N., & Reid, T. (2018). A
classification model for sensing human trust in
machines using EEG and GSR. ACM Transactions on
Interactive Intelligent Systems (TiiS), 8(4), 1-20.
Beer, J. M., Fisk, A. D., & Rogers, W. A. (2014). Toward a
framework for levels of robot autonomy in human-
robot interaction. Journal of human-robot interaction,
3(2), 74.
Benedek, M., & Kaernbach, C. (2010). A continuous
measure of phasic electrodermal activity. Journal of
neuroscience methods, 190(1), 80-91.
Carver, C. S., & White, T. L. (1994). Behavioral inhibition,
behavioral activation, and affective responses to
impending reward and punishment: the BIS/BAS
scales. Journal of personality and social psychology,
67(2), 319.
Elkins, A. C., & Derrick, D. C. (2013). The sound of trust:
voice as a measurement of trust during interactions with
embodied conversational agents. Group decision and
negotiation, 22(5), 897-913.
Fallon, C. K., Murphy, A. K., Zimmerman, L., & Mueller,
S. T. (2010, May). The calibration of trust in an
automated system: A sensemaking process. In 2010
International Symposium on Collaborative
Technologies and Systems (pp. 390-395). IEEE.
Gefen, D., Karahanna, E., & Straub, D. W. (2003). Trust
and TAM in online shopping: An integrated model.
MIS quarterly, 27(1), 51-90.
Glass, A., McGuinness, D. L., & Wolverton, M. (2008,
January). Toward establishing trust in adaptive agents.
In Proceedings of the 13th international conference on
Intelligent user interfaces (pp. 227-236).
Gramfort, A., Luessi, M., Larson, E., Engemann, D. A.,
Strohmeier, D., Brodbeck, C., ... & Hämäläinen, M.
(2013). MEG and EEG data analysis with MNE-
Python. Frontiers in neuroscience, 7, 267.
Gulati, S., Sousa, S., and Lamas, D., (2019) Design,
development and evaluation of a human-computer trust
scale. Behaviour & Information Technology, pp. 1–12.
Hennessey, C., & Duchowski, A. T. (2010, March). An
open source eye-gaze interface: Expanding the
adoption of eye-gaze in everyday applications. In
Proceedings of the 2010 Symposium on Eye-Tracking
Research & Applications (pp. 81-84).
Hergeth, S., Lorenz, L., Vilimek, R., & Krems, J. F. (2016).
Keep your scanners peeled: Gaze behavior as a measure
of automation trust during highly automated driving.
Human factors, 58(3), 509-519.
Hirshfield, L. M., Hirshfield, S. H., Hincks, S., Russell, M.,
Ward, R., & Williams, T. (2011, July). Trust in human-
computer interactions as measured by frustration,
surprise, and workload. In International Conference on
Foundations of Augmented Cognition (pp. 507-516).
Springer, Berlin, Heidelberg.
Hoffman, R. R., Johnson, M., Bradshaw, J. M., &
Underbrink, A. (2013). Trust in automation. IEEE
Intelligent Systems, 28(1), 84-88.
Huckle, T., & Neckel, T. (2019). Bits and Bugs: A
Scientific and Historical Review on Software Failures
in Computational Science. Society for Industrial and
Applied Mathematics.
Hurlburt, G. (2017). How much to trust artificial
intelligence?. IT Professional, 19(4), 7-11.
Lee, J. D., & See, K. A. (2004). Trust in automation:
Designing for appropriate reliance. Human factors,
46(1), 50-80.
Leichtenstern, K., Bee, N., André, E., Berkmüller, U., &
Wagner, J. (2011, June). Physiological measurement of
trust-related behavior in trust-neutral and trust-critical
situations. In IFIP International Conference on Trust
Management (pp. 165-172). Springer, Berlin,
Heidelberg.
Lemmers-Jansen, I. L., Krabbendam, L., Veltman, D. J., &
Fett, A. K. J. (2017). Boys vs. girls: gender differences
in the neural development of trust and reciprocity
depend on social context. Developmental Cognitive
Neuroscience, 25, 235-245.
Litman, T. (2014). Autonomous vehicle implementation
predictions. Victoria Transport Policy Institute,
28(2014).
Lochner, M., Duenser, A., & Sarker, S. (2019, December).
Trust and Cognitive Load in semi-automated UAV
operation. In Proceedings of the 31st Australian
Conference on Human-Computer-Interaction (pp. 437-
441).
Lotte, F., Congedo, M., Lécuyer, A., Lamarche, F., &
Arnaldi, B. (2007). A review of classification
algorithms for EEG-based brain–computer interfaces.
Journal of neural engineering, 4(2), R1.
Makowski, D. (2016). Neurokit: A python toolbox for
statistics and neurophysiological signal processing (eeg
eda ecg emg...). Memory and Cognition Lab'Day, 1.
Mirnig, A. G., Wintersberger, P., Sutter, C., & Ziegler, J.
(2016, October). A framework for analyzing and
calibrating trust in automated vehicles. In Adjunct
Proceedings of the 8th International Conference on
Automotive User Interfaces and Interactive Vehicular
Applications (pp. 33-38).
Oh, S., Seong, Y., & Yi, S. (2017). Preliminary study on
neurological measure of human trust in autonomous
systems. In IIE Annual Conference. Proceedings (pp.
1066-1072). Institute of Industrial and Systems
Engineers (IISE).
Owsley, C., Stalvey, B., Wells, J., & Sloane, M. E. (1999).
Older drivers and cataract: driving habits and crash risk.
Journals of Gerontology Series A: Biomedical Sciences
and Medical Sciences, 54(4), M203-M211.
Parasuraman, R., & Riley, V. (1997). Humans and
automation: Use, misuse, disuse, abuse. Human factors,
39(2), 230-253.
Pedregosa, F., Varoquaux, G., Gramfort, A., Michel, V.,
Thirion, B., Grisel, O., ... & Vanderplas, J. (2011).
HUCAPP 2021 - 5th International Conference on Human Computer Interaction Theory and Applications
172

Scikit-learn: Machine learning in Python. the Journal of
machine Learning research, 12, 2825-2830.
Pu, P., & Chen, L. (2006, January). Trust building with
explanation interfaces. In Proceedings of the 11th
international conference on Intelligent user interfaces
(pp. 93-100).
Rajaonah, B., Anceaux, F., & Vienne, F. (2006). Trust and
the use of adaptive cruise control: a study of a cut-in
situation. Cognition, Technology & Work, 8(2), 146-
155.
Raschka, S. (2018). MLxtend: providing machine learning
and data science utilities and extensions to Python's
scientific computing stack. Journal of open source
software, 3(24), 638.
Rebelo, F., Noriega, P., Duarte, E., & Soares, M. (2012).
Using virtual reality to assess user experience. Human
Factors, 54(6), 964-982.
Rebelo, F., Noriega, P., Duarte, E., & Soares, M. (2012).
Using virtual reality to assess user experience. Human
Factors, 54(6), 964-982.
Schiratti, J. B., Le Douget, J. E., Le van Quyen, M., Essid,
S., & Gramfort, A. (2018, April). An ensemble learning
approach to detect epileptic seizures from long
intracranial EEG recordings. In 2018 IEEE
International Conference on Acoustics, Speech and
Signal Processing (ICASSP) (pp. 856-860). IEEE.
Shafiei, S. B., Hussein, A. A., Muldoon, S. F., & Guru, K.
A. (2018). Functional brain states measure mentor-
trainee trust during robot-assisted surgery. Scientific
reports, 8(1), 1-12.
Siau, K. (2017). Impact of artificial intelligence, robotics,
and automation on higher education.
Siau, K., Sheng, H., Nah, F., & Davis, S. (2004). A
qualitative investigation on consumer trust in mobile
commerce. International Journal of Electronic
Business, 2(3), 283-300.
Söllner, M., & Leimeister, J. M. (2013). What we really
know about antecedents of trust: A critical review of the
empirical information systems literature on trust.
Psychology of Trust: New Research, D. Gefen,
Verlag/Publisher: Nova Science Publishers.
Urbanowicz, R. J., Olson, R. S., Schmitt, P., Meeker, M., &
Moore, J. H. (2018). Benchmarking relief-based feature
selection methods for bioinformatics data mining.
Journal of biomedical informatics, 85, 168-188.
V. L. Pop, A. Shrewsbury, and F. T. Durso. Individual
differences in the calibration of trust in automation.
Human factors, 57(4):545–556, 2015.
V. V. Dixit, S. Chand, and D. J. Nair. Autonomous vehicles:
disengagements, accidents and reaction times. PLoS
one, 11(12):e0168054, 2016.
W. Payre, J. Cestac, and P. Delhomme. Fully automated
driving: Impact of trust and practice on manual control
recovery. Human factors, 58(2):229– 241, 2016.
W. Pieters. Explanation and trust: what to tell the user in
security and ai? Ethics and information technology,
13(1):53–64, 2011.
W.-L. Hu, K. Akash, N. Jain, and T. Reid. Real-time
sensing of trust in human-machine interactions. IFAC-
PapersOnLine, 49(32):48–53, 2016.
Wang, M., Hussein, A., Rojas, R. F., Shafi, K., & Abbass,
H. A. (2018, November). EEG-based neural correlates
of trust in human-autonomy interaction. In 2018 IEEE
Symposium Series on Computational Intelligence
(SSCI) (pp. 350-357). IEEE.
Waytz, A., Heafner, J., & Epley, N. (2014). The mind in the
machine: Anthropomorphism increases trust in an
autonomous vehicle. Journal of Experimental Social
Psychology, 52, 113-117.
X. Li, T. J. Hess, and J. S. Valacich. Why do we trust new
technology? a study of initial trust formation with
organizational information systems.The Journal of
Strategic Information Systems, 17(1):39–71, 2008.
X. Perrin, F. Colas, C. Pradalier, R. Siegwart, R.
Chavarriaga, and J. d. R. Millan. Learning user habits
for semi-autonomous navigation using low´ throughput
interfaces. In 2011 IEEE International Conference on
Systems, Man, and Cybernetics, pp. 1–6. IEEE, 2011.
G Fine Kinney and AD Wiruth. 1976. Practical risk analysis
for safety management. Technical Report. Naval
Weapons Center China Lake Ca.
Psychophysiological Modelling of Trust in Technology: Comparative Analysis of Psychophysiological Signals
173
