Efficient Multi-stream Temporal Learning and Post-fusion Strategy for
3D Skeleton-based Hand Activity Recognition
Yasser Boutaleb
1,2
, Catherine Soladie
2
, Nam-Duong Duong
1
, Amine Kacete
1
, J
´
er
ˆ
ome Royan
1
and Renaud Seguier
2
1
IRT b-com, 1219 Avenue des Champs Blancs, 35510 Cesson-Sevign
´
e, France
2
IETR/CentraleSupelec, Avenue de la Boulaie, 35510 Cesson-Sevign
´
e, France
{catherine.soladie, renaud.seguier}@centralesupelec.fr
Keywords:
First-person Hand Activity, Multi-stream Learning, 3D Hand Skeleton, Hand-crafted Features, Temporal
Learning.
Abstract:
Recognizing first-person hand activity is a challenging task, especially when not enough data are available.
In this paper, we tackle this challenge by proposing a new hybrid learning pipeline for skeleton-based hand
activity recognition, which is composed of three blocks. First, for a given sequence of hand’s joint positions,
the spatial features are extracted using a dedicated combination of local and global spacial hand-crafted fea-
tures. Then, the temporal dependencies are learned using a multi-stream learning strategy. Finally, a hand
activity sequence classifier is learned, via our Post-fusion strategy, applied to the previously learned temporal
dependencies. The experiments, evaluated on two real-world data sets, show that our approach performs better
than the state-of-the-art approaches. For more ablation study, we compared our Post-fusion strategy with three
traditional fusion baselines and showed an improvement above 2.4% of accuracy.
1 INTRODUCTION
Understanding human activity from a first-person
(egocentric) perspective by focusing on the hands is
getting interest of both the computer vision and the
robotics communities. Indeed, the range of potential
applications includes, among others, Human Com-
puter Interaction (Sridhar et al., 2015), Humanoid
Robotics (Ramirez-Amaro et al., 2017), and Vir-
tual/Augmented Realty (Surie et al., 2007). In partic-
ular, with the development of effective and low cost
depth camera sensors over the last years (e.g., Mi-
crosoft Kinect or Intel RealSense), 3D skeletal data
acquisition becomes possible with a sufficient accu-
racy (Yuan et al., 2018; Moon et al., 2018). This has
promoted the problem of human activity recognition.
The 3D Skeletal data provides a robust high-level
description regarding common problems in RGB
imaging, such as background subtraction and light
variation. To this end, many skeleton-based ap-
proaches have been proposed. Most of them are based
on end-to-end Deep Learning (DL) (Du et al., 2015;
Wang and Wang, 2017) which have been proven to
be effective when a large amount of data is available.
Hence, for some industrial applications, providing
2
nd
block
Temporal Dependencies
Learning
Spatial Features
Extraction
Transfer Learning
Fusion
Classification
3
rd
block
1
St
block
Pour juice bottle
Transfer Learning
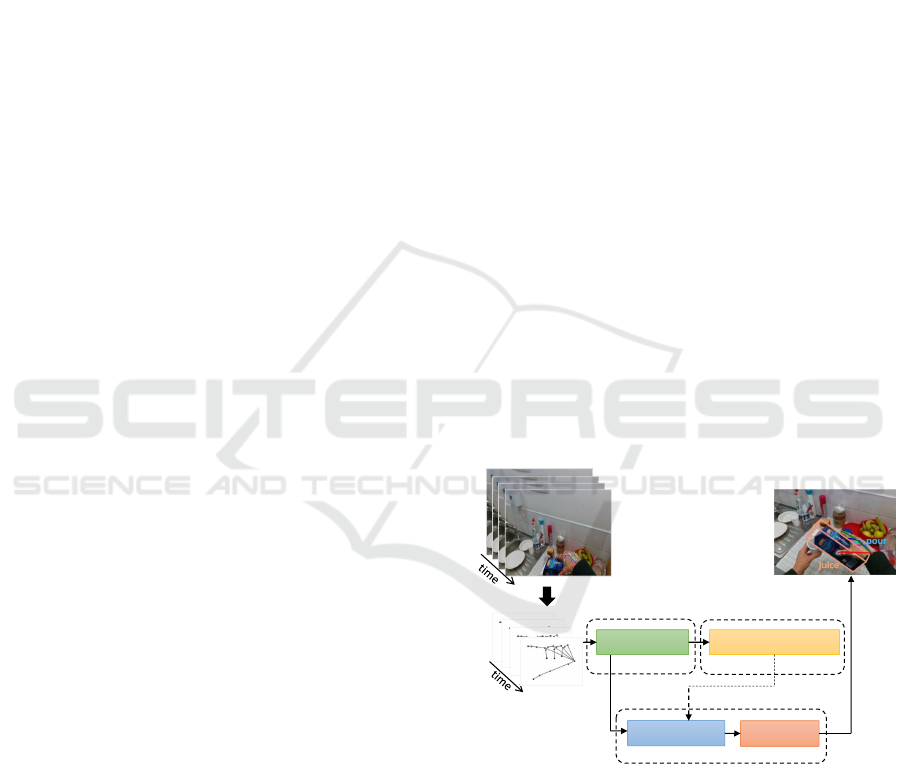
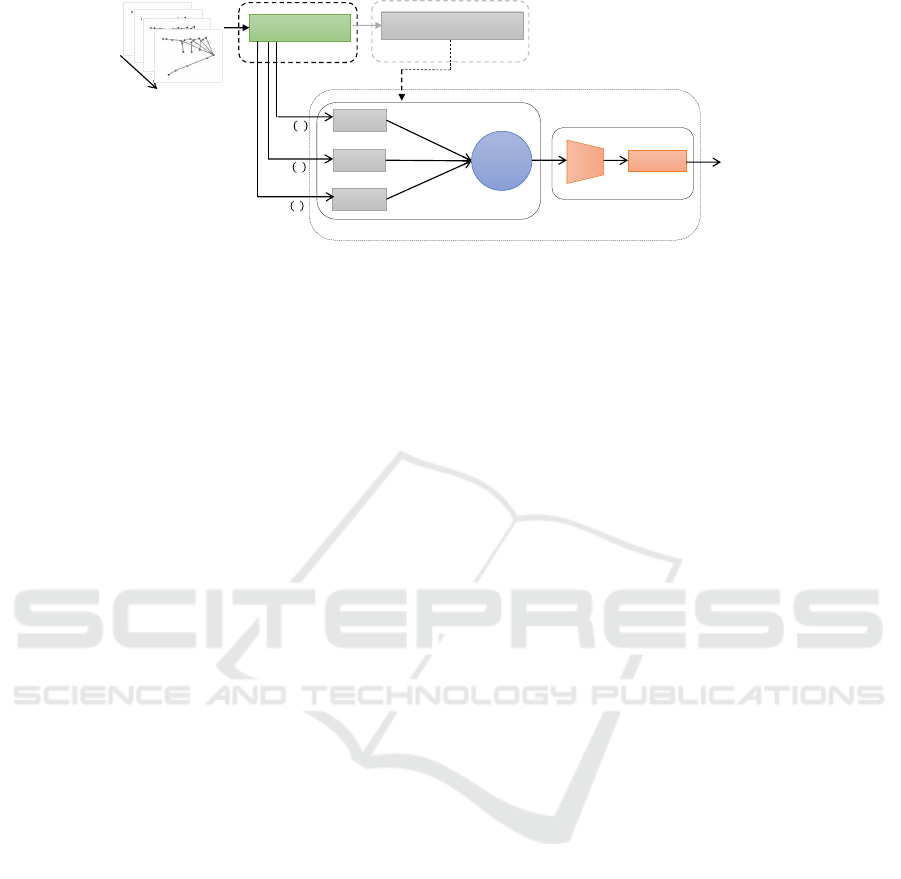
Figure 1: Our proposed learning pipeline for 3D skeleton-
based first-person hand activity recognition. For a given
3D hand skeleton activity sequence, in the first block, the
spacial features are extracted using existent and new hand-
crafted methods. Then, in the second block, the temporal
dependencies are learned. In the last block, a hand activity
sequence classifier is learned, using a Post-fusion strategy,
which is applied to the previously learned temporal depen-
dencies. For the test predictions, only the first and the last
blocks are involved.
large-scale labeled data sets is still hard and expan-
sive to achieve due to the manual data annotation pro-
Boutaleb, Y., Soladie, C., Duong, N., Kacete, A., Royan, J. and Seguier, R.
Efficient Multi-stream Temporal Learning and Post-fusion Strategy for 3D Skeleton-based Hand Activity Recognition.
DOI: 10.5220/0010232702930302
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 4: VISAPP, pages
293-302
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
293
cess. On the other hand, pure hand-crafted (HC) fea-
tures based approaches (Smedt et al., 2016; Devanne
et al., 2015; Kacem et al., 2017; Zhang et al., 2016;
Hussein et al., 2013) can deal with limited amount
of data. Yet, they are still struggling to learn tempo-
ral dependencies along the sequence time-steps. As a
tuning alternative between performance and data ac-
quisition cost, hybrid methods combines DL and pure
HC methods (Avola et al., 2019; Chen et al., 2017;
Liu et al., 2019; Zhang et al., 2019).
Motivated by all these observations, we introduce
in this paper, a new hybrid approach for 3D skeleton-
based first-person hand activity recognition. We high-
light the contributions as follows:
• A novel hybrid learning pipeline for first-person
hand activity recognition that consists of three se-
quential blocks as illustrated in Figure 1: In the
first block, we extract the spatial features using
our proposed selection of existent and new HC
features extraction methods. Then, in the sec-
ond block, we differ from the existing methods
by learning the temporal dependencies indepen-
dently on each HC features, using a simplified
separated Neural Network (NN) to avoid the over-
fitting problem. Finally, we exploit the knowledge
from the previous block to classify activities us-
ing a tuning strategy that we called a Post-fusion.
Once the learning is completed, for the predic-
tions, only the first and the last blocks are in-
volved. This multi-steps learning pipeline allows
training on a limited number of samples while en-
suring good accuracy.
• A combination of three local and global HC fea-
tures extraction methods for 3D skeleton-based
first-person hand activity recognition, that we
summarize as follows. (1) Inspired by (Smedt
et al., 2016), we use a Shape of Connected Joints
(SoCJ), which characterizes the activity sequence
by the variation of the physical hand shape at
each time-step. (2) Our proposed Intra/Inter Fin-
ger Relative Distances (IIFRD) which also rele-
vantly characterizes the activity sequence at each
time-step by the variation of the Inter-fingers rel-
ative distances between the physically adjacent
fingers pairs, and the Intra-Finger Relative Dis-
tances which belong to the distance between two
opposite joints of a pairs of directly connected
segments of the finger. (3) Since the SoCJ and
IIFRD only focus on the local features of the hand
at each time-step, we proposed a complimentary
HC method called Global Relative Translations
(GRT), that focuses on the global features of the
entire sequence, by exploiting the displacement of
the hand during the activity.
Hand-Crafted (HC)
Spatial Features
Learning
Temporal Dependencies
Learning
Classification
HC Temporal Dependencies
Extraction
Classification
Temporal Dependencies
Learning
Classification
Deep Learning (DL)
Hand-Crafted (HC)
Deep Learning (DL)
Spatial Features
Extraction
Spatial Features
Extraction
(a)
(c)
(b)
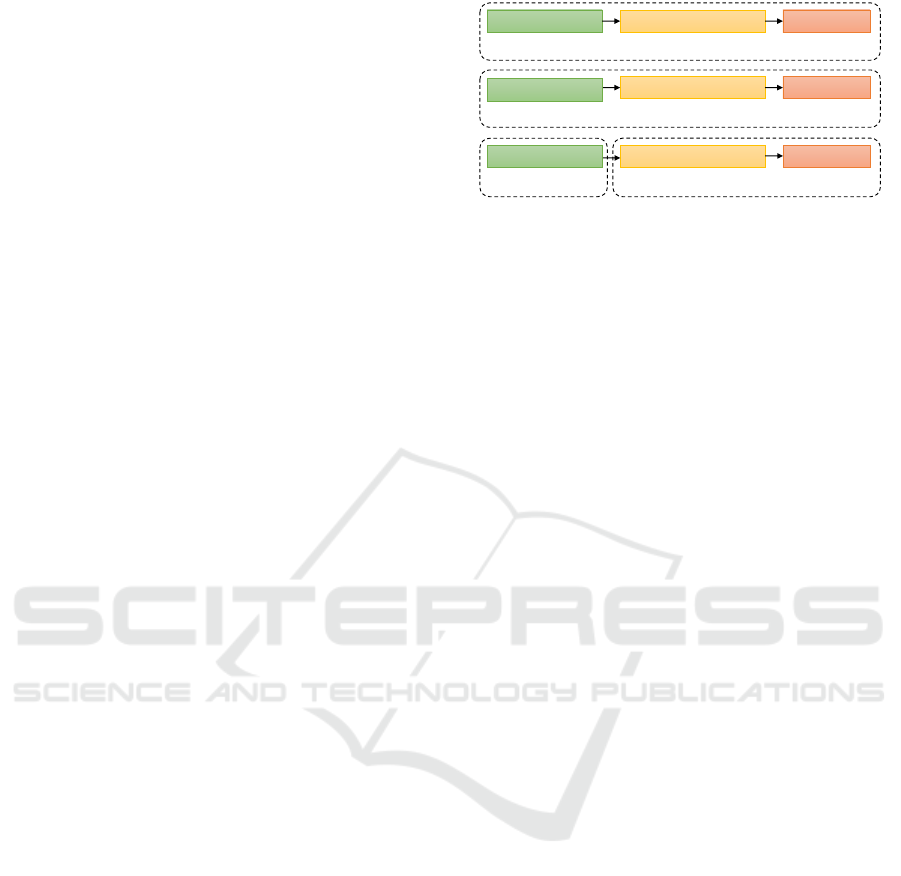
Figure 2: A categorization of 3D Skeleton-based activity
recognition methods. (a) Deep Learning based methods
(DL). (b) Hand-Crafted methods (HC). (c) Hybrid methods
that combine both DL and HC methods.
The remainder of this paper is organised as fol-
lows. After giving a review on the related work in
Section 2, we describe our proposed approach for 3D
skeleton-based hand activity recognition in Section 3.
Then, we show the benefit of the proposed approach
by presenting and discussing the experimental results
in Section 4. Section 5 concludes the paper.
2 RELATED WORK
This section presents related work for 3D skeleton-
based first-person hand activity recognition. We
also introduce other similar 3D skeleton-based ap-
proaches, namely, dynamic hand gesture recognition
and human activity recognition. We categorize these
approaches as DL based (Sec 2.1), HC based (Sec
2.2), and Hybrid methods (Sec 2.3) as illustrated in
Figure 2.
2.1 Deep Learning based Methods
Recently, end-to-end DL approaches (Figure 2. (a))
showed great success in different applications, includ-
ing skeleton-based activity recognition (Wang et al.,
2019). The great performance of Convolutional Neu-
ral Networks (CNNs) has motivated (Caetano et al.,
2019a; Caetano et al., 2019b) to formulate the recog-
nition problem as an image classification problem by
representing a sequence of 3D skeleton joints as a 2D
image input for a deep CNN. Also, attracted by the
success of CNNs, (Li et al., 2017) proposed a two-
stream feature convolutional learning to manage both
spatial and temporal domains. On the other hand,
other recent works (Yan et al., 2018; Tang et al., 2018;
Shi et al., 2018; Li et al., 2019; Si et al., 2019) fo-
cused on the Graph Convolutional Networks (GCNs)
to exploit the connections between the skeleton joints
formed by the physical structure. Furthermore, to
better exploit information in the temporal dimension,
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
294

many other works focused on Recurrent Neural Net-
works (RNNs) equipped with Long Short Term Mem-
ory (LSTMs) cells (Du et al., 2015; Liu et al., 2016) or
Gated Recurrent Units (GRUs) (Maghoumi and LaVi-
ola, 2018) for their capabilities of reasoning along the
temporal dimension to learn the temporal dependen-
cies. More recently, (Nguyen et al., 2019) proposed
a new NN layer that uses Symmetric Positive Defi-
nite (SPD) matrix as low-dimensional discriminative
descriptor for classification, which has been proven
to be effective. However, most of these methods still
have difficulties to extract relevant spatial features due
to the limited number of training samples and the
sparseness of the 3D skeleton data.
2.2 Hand-crafted based Methods
In spite of the success of DL approaches in the last
few years, classical methods that mainly use HC tech-
niques to perform recognition (Figure 2. (b)) still get
attention. Most of these approaches focus on repre-
senting the data in a non-Euclidean domain. A refer-
ence work was proposed by (Vemulapalli et al., 2014)
where they represented the 3D skeleton data as points
on a Lie group. Also, in (Devanne et al., 2015), a
Riemannian manifold is used as a non-Euclidean do-
main to formulate the recognition problem as a prob-
lem of computing the similarity between the shape
of trajectories. Similarly and besides, (Zhang et al.,
2016; Kacem et al., 2017), exploited the Gram Ma-
trix to handle the temporal dimension and distances
measurement for the classification.
On the other hand, more closer to our HC fea-
tures extraction methods, some recent work focused
on the exploitation of the 3D geometrical informa-
tion. (Smedt et al., 2016) proposed a set of HC ge-
ometrical features based on the connection between
the hand joints and rotations, that they represented as
histograms input vectors for a SVM to classify hand
gestures. Similarly to (Evangelidis et al., 2014; Zhang
et al., 2013), (Smedt et al., 2016) used a Temporal
Pyramid representation to manage the temporal di-
mension. In (Ohn-Bar and Trivedi, 2013), joint an-
gles similarities and a Histogram of Oriented Gradi-
ents (HOG) are used as input into a SVM to classify
activities. This category of methods has been proven
to be very effective in providing relevant spatial fea-
tures, but most of them are still struggling to learn
long-term temporal dependencies.
2.3 Hybrid Methods
This category (Figure 2. (c)) combines the two pre-
viously introduced approaches (Sec 2.1 and Sec 2.2)
to overcome their limitations. Seeking to exploit their
advantages, our proposed approach falls in this cat-
egory since DL methods have been proven power-
ful in learning temporal dependencies, while HC fea-
tures based methods gives very discriminating spatial
features. (Avola et al., 2019) concatenated a set of
HC features as an input into a deep LSTMs to clas-
sify American Sign Language (ASL) and semaphoric
hand gestures. Similarly, aiming at classifying Hu-
man 3D Gaits, (Liu et al., 2019) concatenated relative
distances and angles as a feature input vector into an
LSTM to manage the temporal dimension, while in
parallel a CNN is exploited to learn spatial features
from 2D Gait Energy Images. Yet, the early fusion
of different features spaces increases the input com-
plexity and the learning noise (Ying, 2019), especially
when only few training data are provided. To prevent
this problem, (Chen et al., 2017), proposed an end-
to-end slow fusion based architecture. But this type
of complex architecture requires a lot of data amount.
More recently (Zhang et al., 2019) proposed a Quater-
nion Product Unit (QPU), that describes 3D skeleton
with rotation-invariant and rotation-equivariant fea-
tures, which can be fed into a Deep Neural Networks
(DNN) to recognize activities. Yet, results given by
their experiments showed a low score of accuracy.
3 PROPOSED METHOD
This section details our proposed hybrid approach fol-
lowing the illustration of Figure 1. In the first block,
we extract the HC features (Sec 3.1). Then, in the sec-
ond block, we learn the temporal dependencies (Sec
3.2). Once the temporal learning is ended, in the last
block we transfer and exploit the knowledge from the
previous block to learn classifying activities (Sec 3.3).
3.1 Hand-crafted Features Extraction
A 3D hand skeleton activity sequence is the only in-
put, that we denote S(t). At each time-step t, the
hand is represented by a configuration of physically
connected n joints {J
t
j
= (x
t
j
, y
t
j
, z
t
j
)}
j=1:n
. Each joint
is represented by 3D Cartesian coordinates forming
a set of segments that yields to the hand bones, the
phalanges and metacarpals (Figure 3). We define and
formulate the activity sequence as follows:
S(t) = {{J
t
j
}
j=1:n
}
t=0:T
(1)
where T is the max length of the sequence.
In order to exploit the 3D geometrical informa-
tion, in the first block, we use three HC features ex-
traction methods, that provide relevant features for
Efficient Multi-stream Temporal Learning and Post-fusion Strategy for 3D Skeleton-based Hand Activity Recognition
295
21
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
(a)
(c)
Distal Phalanges
Intermediate Phalanges
Proximal Phalanges
Metacarpals
1
2
3
5
6
7
9
10
11
12
13
14
15
16
17
18
19
20
8
(b)
4
21
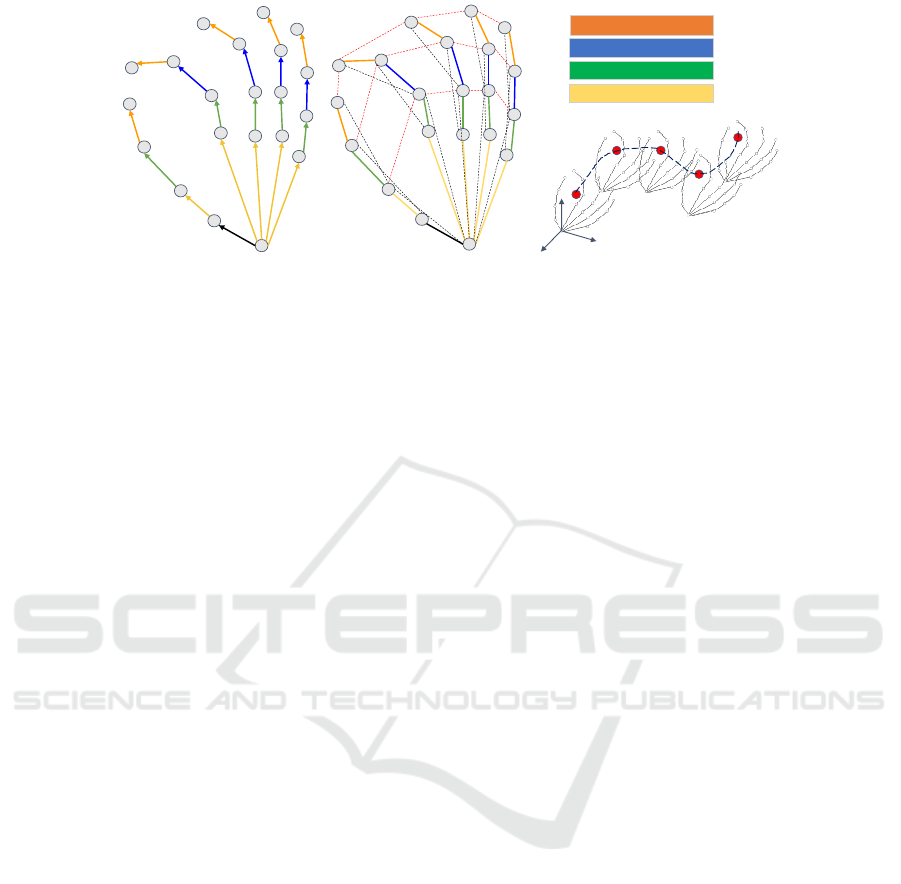
Figure 3: The proposed selection of hand-crafted features. (a) Shape of Connected Joints (SoCJ), the hand shape is repre-
sented by 3D vectors between physically connected joints (Smedt et al., 2016). (b) Our proposed Intra/Inter Finger Relative
Distances (IIFRD) which characterize the activities by the high variation of intra-finger distances RD
a
(in black) and inter-
finger distances RD
e
(in red). (c) Our proposed Global Relative Translation which aims to characterize the activity sequence
by the translation of the joints centroid at each time-step.
first-person hand activity recognition. Note that be-
fore proceeding to feature extraction, the 3D hand
skeleton data are normalized, such as all the hands of
all the subjects are adjusted to the same average size
while keeping the angles intact. In the following de-
scriptions, we model the hand skeleton by fixing the
number of joints to n = 21.
Shape of Connected Joints (SoCJ). Inspired by
(Smedt et al., 2016), we use the SoCJ to represent
the variation of the hand shape during the activtiy.
For each finger, we compute the 3D vectors between
physically connected joints, from the wrist up to the
fingertips (Figure 3 (a)). Let F
1
= {J
j
}
j=1:5
be a set
of joints which are ordered such as they represent the
physical connections of the thumb finger and wrist
joint J
1
as shown in Figure 3 (a), the SoCJ(F
1
) can
be computed as follows:
SoCJ(F
1
) = {J
j
− J
j−1
}
j=5:2
(2)
By applying the SoCJ to all the fingers, as a result,
for each time-step t, we obtain a feature descriptor
{SoCJ(F
t
l
)}
l=1:5
∈ R
4×5×3
, where F
l
is the l-th finger.
Ψ
1
(.) denote the SoCJ method applied to the entire
activity sequence S(t), that we define as follows:
Ψ
1
(S(t)) = {{SoCJ(F
t
l
)}
l=1:5
}
t=0:T
(3)
Intra/Inter Finger Relative Distances (IIFRD). We
exploit the periodic variation of the intra-finger and
inter-fingers relative distances, which relevantly char-
acterizes the activity sequence (Figure 3 (b)).
• The intra-finger relative distances, that we denote
RD
a
, gives strong internal dependencies between
finger’s connected segments. It represents the dis-
tance between two opposite joints of a pairs of
directly connected segments from each fingertip
down to the wrist (Figure 3 (b) in black). Lets
take F
1
as described previously. The RD
a
(F
1
) can
be computed as follows:
RD
a
(F
1
) = {d(J
j
, J
j−2
)}
j=5:3
(4)
where d is the Euclidean distance. By applying
the RD
a
to all fingers, for each time-step t, we get
a feature descriptor a(t) = {RD
a
(F
t
l
)}
l=1:5
∈ R
15
.
• The inter-finger relative distances, that we denote
by RD
e
(Figure 3 (b) in red), gives external de-
pendencies between adjacent fingers pairs. For
instance, lets take F
1
as described previously and
F
2
= {J
j
}
j=7:9
, two sets of connected joints, that
refers to the thumb and the index fingers respec-
tively. The RD
e
(F
1
, F
2
) is computed as follows:
RD
e
(F
1
, F
2
) = {d(J
j
, J
j+4
)}
j=3:5
(5)
By applying the RD
e
to the four pairs of adjacent
fingers, for each time-step t, we obtain a feature
descriptor e(t) = {RD
e
(F
t
l
, F
t
l+1
)}
l=1:4
∈ R
12
.
Finally, by concatenating the two descriptors a(t) and
e(t), for each time-step t, we obtain a final feature de-
scriptor {a(t), e(t)} ∈ R
15+12
. We denote by Ψ
2
(.)
the IIFRD method applied to the entire activity se-
quence S(t), that we define as follows:
Ψ
2
(S(t)) = {a(t), e(t)}
t=0:T
(6)
Global Relative Translations (GRT). Unlike the
IIFRD and SoCJ descriptors, which only consider the
local features that belong to the fingers motion at each
time-step, the GRT characterize the activity sequence
by computing the relative displacement of all the hand
joints along the sequence time-steps (Figure 3 (c)). To
this end, for each sequence, we fix the wrist joint J
0
1
of the first time-step t = 0 as the origin. Then, we
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
296
LSTM(s)
Softmax
Softmax
Softmax
LSTM(s)
LSTM(s)
Activity
Activity
Activity
(
)
(
)
(
)
SoCJ
IIFRD
GRT
1
St
block
2
nd
block
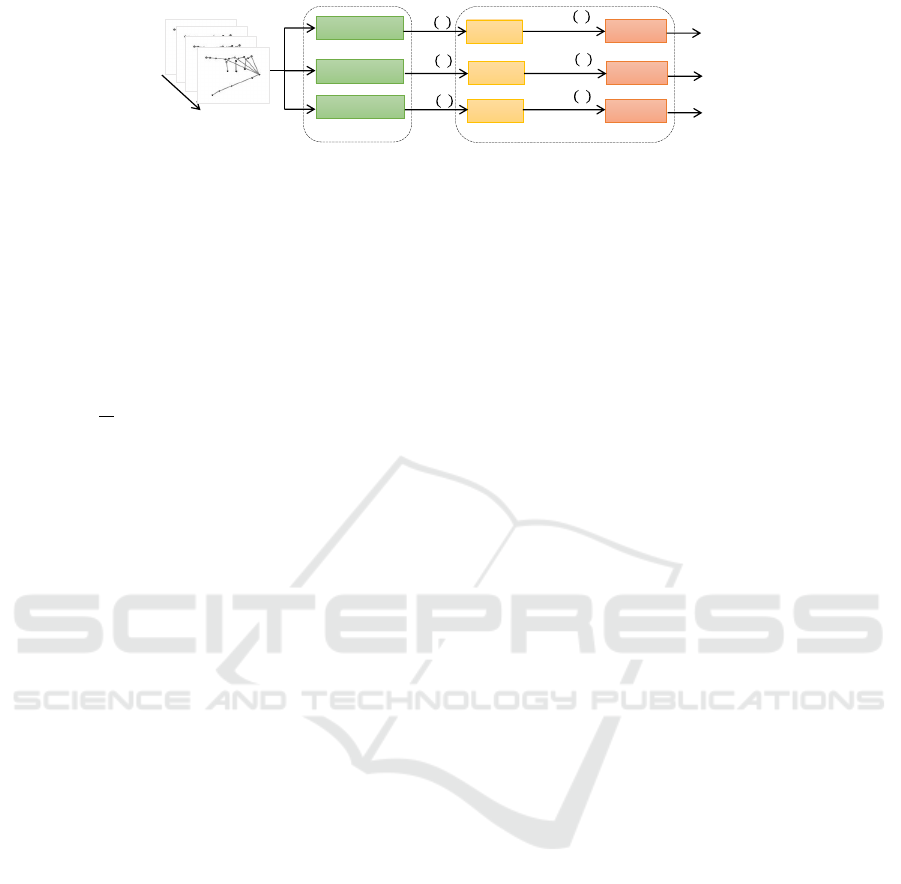
Figure 4: Illustration of the first and second blocks of the proposed learning pipeline. For each hand-crafted feature descriptor
(SoCJ, RD, and GRT) seen in Figure 3, a Neural Network composed of staked LSTM layers and a softmax layer are trained
independently to learn temporal dependencies.
transform all remaining joints of the sequence to this
new coordinate system as follows:
´
J
t
j
= J
t
j
− J
0
1
(7)
where the
´
J
t
j
the new transformed j-th joint at the
time-step t. Once the transformation is done, at each
time-step, we compute the centroid of the transformed
joints C
t
=
1
21
∑
21
j=1
´
J
t
j
. We denote by Ψ
3
(.) the ap-
plication of GRT to the entire sequence S(t), that we
define as follows:
Ψ
3
((S(t)) = {C
t
}
t=0:T
(8)
The GRT gives discriminate complementary in-
formation to the IIFRD and the SoCJ by considering
the global trajectory of the hand along the activity. In
Section 4.3 we quantitatively show the benefit of these
complementary information.
3.2 Temporal Dependencies Learning
Learning long and complex activities requires consid-
ering the temporal dimension to make use of the long-
term dependencies between sequence time-steps. To
this end, we use LSTMs cells for its great success
and capabilities to learn these long/short term depen-
dencies. Moreover, in contrast to traditional RNNs,
LSTMs overcome the vanishing gradient problem
by using a specific circuit of gates (Hochreiter and
Schmidhuber, 1997).
(Avola et al., 2019; Liu et al., 2019) concatenate
different types of features spaces as one input vector,
which may complicate the input and confuse the NN.
In contrast, for each HC features descriptor (seen in
Sec 3.1), we train separately a simple NN that consists
of staked LSTM layers followed by a softmax layer to
classify activities. Therefore, in total, we train three
NN separately as shown in Figure 4.
More formally, lets {Ψ
k
(S)}
k=1:3
be the set of the
three feature descriptors corresponding to Eq.3, Eq.6
and Eq.8 defined in Section 3.1, where S is the activity
sequence input. For each feature descriptor Ψ
k
(S), we
model the temporal dependencies with a composite
function g
θ
k
(Ψ
k
(S)), where g
θ
k
(·) is the k-th LSTM
sub-network with θ the learnable parameters, while
the output of g
θ
k
(·) refers to the last hidden state of
the last LSTM unit. For each network we define a
cross entropy loss function L
k
as follows:
L
k
= −
N
∑
c=1
y
c
log( ˆy
c
k
) (9)
where N is the number of classes, y
c
the target la-
bel and ˆy
c
k
the softmax output that refers to the pre-
dicted label. The temporal learning parameters are
optimized by minimizing over a labeled data set:
θ
∗
k
= arg min
θ
k
L
k
(y, ˆy
k
) (10)
At the end of the training, as a result, we have a
set of three trained LSTM sub-networks, with θ
∗
k
an
optimised parameters:
{g
θ
∗
k
(Ψ
k
(S))}
k=1:3
(11)
We note that the purpose of this second block is to
learn the temporal dependencies, and all the classifi-
cation results ˆy
k
are ignored. Only the results shown
in Eq.11 are needed for the next block.
This pre-training strategy of multiple networks
avoid the fusion of different features spaces, which re-
duces the input complexity and the noise learning. It
also allows the LSTM to focus only on learning over
one specific feature input independently, which also
helps to avoid the over-fitting problem (Ying, 2019).
3.3 Post-fusion Strategy and
Classification
Once the temporal dependencies are learned in the
second block (Sec 3.2), we proceed to the final clas-
sification. To this end, we train another multi-input
NN that exploits the resulted three pre-trained LSTM
layers introduced in (Sec 3.2) that we transfer with a
fixed optimized parameters θ
∗
as illustrated in Figure
5.
Seeking to ensure the best classification accuracy,
the three parallel outputs branches of the transferred
LSTMs are concatenated, then fed into a Multi Lay-
ers Perception (MLP) that consists of two Fully Con-
nected (FC) layers, followed by a softmax layer (Fig-
ure 5). We model this network as shown in Eq.12,
Efficient Multi-stream Temporal Learning and Post-fusion Strategy for 3D Skeleton-based Hand Activity Recognition
297
LSTM(s)
LSTM(s)
LSTM(s)
Transfer Learning Fusion
MLP
Softmax
Fusion
Activity
Classification
2
nd
block
Temporal Dependencies
Learning
Transfer Learning
3
rd
block
Spatial Features
Extraction
1
St
block
Figure 5: Illustration of the third block of the proposed pipeline. Once the temporal dependencies are learned in the second
block. The LSTM layers are transferred to the third block with fixed parameters. Their outputs are fused and fed into a MLP
followed by a softmax layer for the final classification.
where f
φ
is a MLP+softmax with learnable parame-
ters φ, and h is the concatenation function:
f
φ
(h({g
θ
∗
k
(Ψ
k
(S))}
k=1:3
)) (12)
The learnable parameters φ are optimized using
the same loss function as in the previous block (Sec
3.2) by minimizing over the same training data set.
Note that for the test predictions, only this network is
involved using the three HC features descriptors in-
troduced in (Sec 3.1) as a multi-input.
The proposed Post-fusion strategy aims at ensur-
ing a good accuracy score through tuning between
the pre-trained networks outputs. In Section 4.4,
we quantitatively show the efficiency of this strategy
compared to other traditional fusing and classification
methods.
4 EXPERIMENTS
4.1 Data Sets
FPHA Data Set. Proposed by (Garcia-Hernando
et al., 2018). It’s the only publicly available data set
for first-person hand activity recognition. This data
set provides RGB and depth images with the 3D an-
notations of the 21 hand joints, the 6 Dof object poses,
and the activity classes. It is a diverse data set that in-
cludes 1175 activity videos belonging to 45 different
activity categories, in 3 different scenarios performed
by 6 actors with high inter-subject and intra-subject
variability of style, speed, scale, and viewpoint. It
represents a real challenge for activity recognition al-
gorithms. We note that, for the proposed method, we
only need the 3D coordinates of the hand joints. For
all the experiments, we used the setting proposed in
(Garcia-Hernando et al., 2018), with exactly the same
distribution of data: 600 activity sequences for train-
ing and 575 for testing.
Dynamic Hand Gesture (DHG) 14/28 Data Set.
Proposed by (Smedt et al., 2016), which is basically
devoted to a related domain, namely the hand ges-
ture recognition. We use it in order to better validate
our proposed approach. The data set contains 14 ges-
tures performed in two ways: using one finger and
the whole hand. Each gesture is performed 5 times
by 20 participants in 2 ways, resulting in 2800 se-
quences. Sequences are labelled following their ges-
ture, the number of fingers used, the performer and the
trial. Each frame contains a depth image, the coordi-
nates of 22 joints both in the 2D depth image space
and in the 3D world space forming a full hand skele-
ton. Note that for our experiment we only need the
3D hand skeleton joints. We ignored the palm center
and we only considered the remaining 21 hand joints.
4.2 Implementation Details
The Learning of Temporal Dependencies. For ev-
ery extracted HC features, we trained different config-
urations of separated NNs that consists of 1,2,3 and 4
staked LSTM layers followed by a softmax. We se-
lected the best configuration that gives the best accu-
racy score: only one LSTM layer of 100 units for the
FPHA data set, and two staked LSTMs of 200 units
for the DHG 14/28 data set. We set the probabil-
ity of dropout to 0.5 (outside and inside the LSTM
gates). We use Adam with a learning rate of 0.001 for
the optimization. All the networks are trained with a
batch size of 128 for 2000 to 3000 epochs. We also,
padded all the sequence lengths to 300 time-steps per
sequence.
Post-fusion and Classification. Once all the tempo-
ral dependencies are learned (end of block 2), in the
Post-fusion step, we recover the pre-trained LSTM
networks, we fix all their weights, and we discard the
softmax layers. Then, the three outputs branches from
the three parallel transferred LSTMs are concatenated
and followed by a MLP that consists of two dense
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
298
layers of 256 and 128 neurons respectively, equipped
with a relu activation function. At the end of the
network, a softmax layer is used for the final clas-
sification. This network is trained until 100 epochs,
with the same batch size and optimization parameters
as the previous networks. Our implementations are
based on the Keras framework.
4.3 Hand-crafted Features Analysis
Table 1: Test accuracy results on the FPHA data set. The
selection hand-crafted features independently, and the com-
binations using our proposed approach.
Hand-crafted Feature Acc.(%)
Shape of Connected Joints (SoCJ) 89.91
Intera/Inter Finger Relative Distance (IIFRD) 88.17
Global Relative Translations (GRT) 58.26
IIFRD + GRT 93.73
SoCJ + GRT 92.17
SoCJ + IIFRD 93.91
SoCJ + IIFRD + GRT 96.17
In order to analyse the effectiveness of the selected
HC features, we evaluated each one independently
using a simplified end-to-end NN architecture com-
posed of one LSTM layer of 100 units with a dropout
of 0.5 (outside and inside the LSTM gates) and a soft-
max layer. We also evaluated possible HC features
combinations by using our approach with the same
configuration introduced in (Sec 4.2). The results in
Table 1. show that the SoCJ and IIFRD, alone, are
capable of achieving a good accuracy of 89.91% and
88.17% respectively. As expected, the GRT alone is
unable to classify activities by achieving only 58.26%
of accuracy. But, it boosts the performance if com-
bined with the SoCJ, the IIFRD, or both, by achieving
the best accuracy of 96.17%. This can be explained
by the fact that the SoCJ, and the IIFRD focus on
the local features based on the motion of the fingers,
ignoring translations between the activity sequence
time-steps, while the GRT focuses on the global fea-
ture based on the displacement of the hand during the
activity, which provides an important complimentary
information. The combination of the three selected
HC features allowed us to overcome the commonly
confused classes ”open wallet” and ”use calculator”
even if the hand poses are dissimilar but more sub-
tle (Garcia-Hernando et al., 2018). Nevertheless, we
still get confusion between ”open wallet” and ”flip
sponge” classes, due to the limited displacement of
the hand, the shortness of the activities, and the lim-
ited number of samples in the data set compared to the
other classes (Garcia-Hernando et al., 2018). Please
refer to the appendix for more details.
4.4 Post-fusion Strategy and
Classification Analysis
We compared our Post-fusion strategy with three tra-
ditional baselines, the early, the slow, and the late fu-
sion, that we define as follows:
Softmax
LSTM(s)
LSTM(s)
LSTM(s)
LSTM(s)
Softmax
Softmax
Softmax
Fusion
Fusion
(a)
(b)
LSTM(s)
LSTM(s)
LSTM(s)
MLP
MLP
MLP
MLP
Softmax
Fusion
(c)
Activity
SoCJ
IIFRD
GRT
SoCJ
IIFRD
GRT
Activity
SoCJ
IIFRD
GRT
Activity
𝑡
0
𝑡
𝑇
𝑡
0
𝑡
𝑇
𝑡
0
𝑡
𝑇
Early fusion
Slow fusion
Late fusion
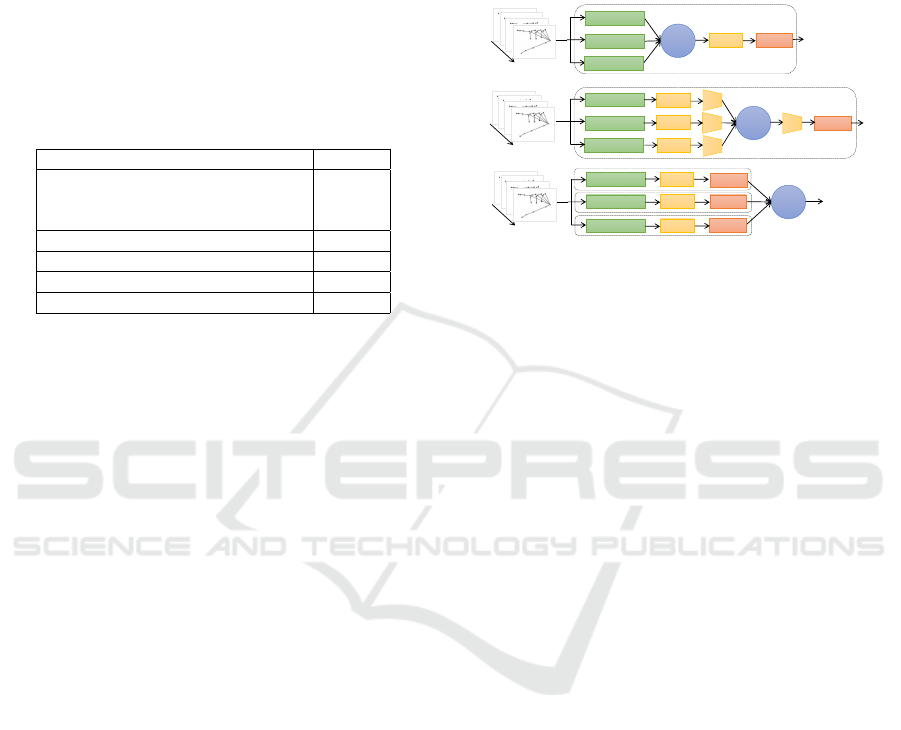
Figure 6: Hybrid fusion and classification baselines, (a)
Early fusion, is an end-to-end architecture, where the ex-
tracted hand-crafted features are concatenated and fed into
a temporal learning network followed by a classifier. (b)
Slow fusion, is an end-to-end architecture, where, for each
extracted hand-crafted feature, the temporal dependencies
are learned separately, then concatenated and fed into a clas-
sifier. (c) Late fusion, is a multi-stream learning, where for
each extracted features, an end-to-end temporal network is
trained separately, and at the end, a majority vote is applied
to the their classifier outputs.
Early Fusion. (Figure 6. (a)) As in (Avola et al.,
2019; Liu et al., 2019), we concatenate our extracted
HC features descriptors in one unified vector that we
fed into deep staked LSTM layers of 200 units fol-
lowed by a softmax layer. We evaluated the baseline
with a configuration of 2, 3 and 4 staked layers, then,
the best accuracy results are selected for the compari-
son.
Slow Fusion. (Figure 6. (b)) As in (Chen et al.,
2017), for each extracted HC features descriptor, we
used 2 stacked LSTM layers of 200 units, followed
by a Fully Connected layer (FC) of 128 neurons. The
outputs from the three parallel FC branches are con-
catenated and followed by 2 sequential FC layers of
256 and 128 neurons respectively. At the end of the
network, a softmax layer is used for the classification.
All the layers are followed by a dropout layer, and
all the FC layers are equipped with a relu activation
function.
Late Fusion. (Figure 6. (c)) In contrast to the previ-
ously introduced end-to-end baselines, in this archi-
tecture, for each HC features a NN composed of a
LSTM layer of 100 units and softmax layer is trained
separately. At the end of training, a majority vote is
applied by adding the softmax outputs scores.
Efficient Multi-stream Temporal Learning and Post-fusion Strategy for 3D Skeleton-based Hand Activity Recognition
299

Table 2: Accuracy results on 50%, and 100% of the 600
FPHA data set training samples. For the test, all the 575
testing samples are kept. We compared our proposed ap-
proach with three traditional fusion and classification base-
lines.
Architecture 300 samples Acc.(%) 600 samples Acc.(%)
Early fusion 75.65 90.95
Slow fusion 63.47 86.43
Late fusion 76.26 93.73
Our 79.78 96.17
We trained our network architecture and the se-
lected baselines with 100%, then only 50% of the 600
training samples of the FPHA data set that belongs to
the subject 1, 3, and 6. For the test, we kept all the
575 testing samples.
Our proposed approach outperforms the baselines
with more then 3.52% using 50% and 2.44% of accu-
racy using 100% of 600 training samples respectively,
which confirms the effectiveness of our fusion strat-
egy. Moreover, by using only 300 samples (a half)
of the FPHA data set training samples, our approach
is achieving the state-of-the-art performance. Thanks
to its simplified architecture, the early fusion outper-
forms the slow fusion, which is more complex and
implies the over-fitting problem. The late fusion out-
Table 3: Test accuracy comparison of our proposed ap-
proach and the state-of-the-art approaches on the FPHA
data set. The bests results are marked in bold.
Method Color Depth Pose Acc.(%)
(Feichtenhofer et al., 2016) X 7 7 61.56
(Feichtenhofer et al., 2016) X 7 7 69.91
(Feichtenhofer et al., 2016) X 7 7 75.30
(Ohn-Bar and Trivedi, 2014) 7 X 7 59.83
(Ohn-Bar and Trivedi, 2014) 7 X X 66.78
(Oreifej and Liu, 2013) 7 X 7 70.61
(Rahmani and Mian, 2016) 7 X 7 69.21
(Garcia-Hernando et al., 2018) 7 7 X 78.73
(Garcia-Hernando et al., 2018) 7 7 X 80.14
(Zanfir et al., 2013) 7 7 X 56.34
(Vemulapalli et al., 2014) 7 7 X 82.69
(Du et al., 2015) 7 7 X 77.40
(Zhang et al., 2016) 7 7 X 85.39
(Garcia-Hernando et al., 2018) 7 7 X 80.69
(fang Hu et al., 2015) X 7 7 66.78
(fang Hu et al., 2015) 7 X 7 60.17
(fang Hu et al., 2015) 7 7 X 74.60
(fang Hu et al., 2015) X X X 78.78
(Huang and Gool, 2016) 7 7 X 84.35
(Huang et al., 2016) 7 7 X 77.57
(Tekin et al., 2019) X 7 7 82.26
(Zhang et al., 2019) 7 7 X 82.26
(Lohit et al., 2019) 7 7 X 82.75
(Nguyen et al., 2019) 7 7 X 93.22
(Rastgoo et al., 2020) X 7 X 91.12
Our 7 7 X 96.17
performs both, thanks to its simplified NNs trained in-
dependently, which helps to overcome the over-fitting
problem. The late fusion preforms well, but its naive
fusion can not ensure good tuning between the NNs
outputs. Please refer to the appendix for more com-
parison.
4.5 State-of-the-Art Comparison
Table 3 shows the accuracy of our approach compared
with the state-of-the-art approaches on the FPHA data
set. We note that the accuracy results of (Feichten-
hofer et al., 2016; Ohn-Bar and Trivedi, 2014; Or-
eifej and Liu, 2013; Rahmani and Mian, 2016; Zanfir
et al., 2013; Vemulapalli et al., 2014; Du et al., 2015;
Zhang et al., 2016; fang Hu et al., 2015) and (Huang
and Gool, 2016; Huang et al., 2016) are reported by
(Garcia-Hernando et al., 2018) and (Nguyen et al.,
2019) respectively, where the recognition may need
the full body joints instead of hands and some of them
might not be tailored for hand activities.
The best performing approaches among state-of-
the-art methods are the NN based on SPD manifold
learning (Nguyen et al., 2019), and the multi-modal
approach proposed by Razieh et al (Rastgoo et al.,
2020), which gives 93.22% and 91.12% of accu-
racy respectively, 3.26% inferior to our proposed ap-
proach. The remaining methods are outperformed by
our approach by more than 11% of accuracy.
Table 4: Accuracy comparison of our proposed approach
and the state-of-the-art approaches on DHG-14/28 data set.
The bests results are marked in bold.
Method Color Depth Pose
Accuracy (%)
14 gest 18 gest
(Oreifej and Liu, 2013) 7 X 7
78.53 74.03
(Devanne et al., 2015) 7 7 X
79.61 62.00
(Huang and Gool, 2016) 7 7 X
75.24 69.64
(Ohn-Bar and Trivedi, 2014) 7 7 X
83.85 76.53
(Chen et al., 2017) 7 7 X
84.68 80.32
(Smedt et al., 2016) 7 7 X
88.24 81.90
(Devineau et al., 2018) 7 7 X
91.28 84.35
(Nguyen et al., 2019) 7 7 X
94.29 89.40
(Maghoumi and LaViola, 2018) 7 7 X
94.50 91.40
(Avola et al., 2019) 7 7 X
97.62 91.43
Our 7 7 X
95.21 90.10
Table 4 shows that our proposed approach is
achieving the state-of-art results on the DHG-14/28
data set, even that our selected HC features methods
are adapted to the first-person hand activity recogni-
tion and not to the hand gesture recognition problem.
The approach proposed by (Avola et al., 2019) out-
performs all the state-of-the-art approaches including
ours, thanks to theirs proposed HC features which
are well adapted to American Signe Language (ASL)
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
300

and semaphoric hand gestures. Furthermore, the time
sampling strategy used in (Avola et al., 2019) allows
to better classify the least dynamic and shortest ges-
tures, unlike our proposed approach which is adapted
to deal with the hand activities where the hand is sup-
posed to be more dynamic.
5 CONCLUSIONS
In this paper, a novel learning pipeline for first-person
hand activity recognition is presented. The proposed
pipeline is composed of three blocks. The first block
is a new combination of HC features extraction meth-
ods. The second block is our multi-stream temporal
dependencies learning strategy. In the last block, we
introduced our proposed Post-fusion strategy, which
has been proven to be more efficient than other ex-
isting traditional fusion methods. The proposed ap-
proach is evaluated on two real world data set and
showed a good accuracy results.
As future improvements, we plan to exploit the
color and object pose information in addition to the
skeletal data, in order to avoid the ambiguous case
where the manipulated objects in different activities
may have the same dimension but with different col-
ors.
REFERENCES
Avola, D., Bernardi, M., Cinque, L., Foresti, G. L., and
Massaroni, C. (2019). Exploiting recurrent neural net-
works and leap motion controller for the recognition
of sign language and semaphoric hand gestures. IEEE
Transactions on Multimedia, 21:234–245.
Caetano, C., Br
´
emond, F., and Schwartz, W. R. (2019a).
Skeleton image representation for 3d action recogni-
tion based on tree structure and reference joints. 2019
32nd SIBGRAPI Conference on Graphics, Patterns
and Images (SIBGRAPI), pages 16–23.
Caetano, C., de Souza, J. S., Br
´
emond, F., dos Santos, J. A.,
and Schwartz, W. R. (2019b). Skelemotion: A new
representation of skeleton joint sequences based on
motion information for 3d action recognition. 2019
16th IEEE International Conference on Advanced
Video and Signal Based Surveillance (AVSS), pages 1–
8.
Chen, X., Guo, H., Wang, G., and Zhang, L. (2017).
Motion feature augmented recurrent neural network
for skeleton-based dynamic hand gesture recognition.
2017 IEEE International Conference on Image Pro-
cessing (ICIP), pages 2881–2885.
Devanne, M., Wannous, H., Berretti, S., Pala, P., Daoudi,
M., and Bimbo, A. D. (2015). 3-d human action
recognition by shape analysis of motion trajectories
on riemannian manifold. IEEE Transactions on Cy-
bernetics, 45:1340–1352.
Devineau, G., Moutarde, F., Xi, W., and Yang, J. (2018).
Deep learning for hand gesture recognition on skele-
tal data. 2018 13th IEEE International Conference
on Automatic Face & Gesture Recognition (FG 2018),
pages 106–113.
Du, Y., Wang, W., and Wang, L. (2015). Hierarchical recur-
rent neural network for skeleton based action recogni-
tion. 2015 IEEE Conference on Computer Vision and
Pattern Recognition (CVPR), pages 1110–1118.
Evangelidis, G. D., Singh, G., and Horaud, R. (2014).
Skeletal quads: Human action recognition using joint
quadruples. 2014 22nd International Conference on
Pattern Recognition, pages 4513–4518.
fang Hu, J., Zheng, W.-S., Lai, J.-H., and Zhang, J. (2015).
Jointly learning heterogeneous features for rgb-d ac-
tivity recognition. In CVPR.
Feichtenhofer, C., Pinz, A., and Zisserman, A. (2016). Con-
volutional two-stream network fusion for video action
recognition. 2016 IEEE Conference on Computer Vi-
sion and Pattern Recognition (CVPR), pages 1933–
1941.
Garcia-Hernando, G., Yuan, S., Baek, S., and Kim, T.-K.
(2018). First-person hand action benchmark with rgb-
d videos and 3d hand pose annotations.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural Computation, 9:1735–1780.
Huang, Z. and Gool, L. V. (2016). A riemannian network
for spd matrix learning. ArXiv, abs/1608.04233.
Huang, Z., Wu, J., and Gool, L. V. (2016). Building deep
networks on grassmann manifolds. In AAAI.
Hussein, M. E., Torki, M., Gowayyed, M. A., and El-Saban,
M. (2013). Human action recognition using a tem-
poral hierarchy of covariance descriptors on 3d joint
locations. In IJCAI.
Kacem, A., Daoudi, M., Amor, B. B., and Paiva, J. C.
´
A.
(2017). A novel space-time representation on the pos-
itive semidefinite cone for facial expression recogni-
tion. 2017 IEEE International Conference on Com-
puter Vision (ICCV), pages 3199–3208.
Li, C., Zhong, Q., Xie, D., and Pu, S. (2017). Skeleton-
based action recognition with convolutional neural
networks. 2017 IEEE International Conference on
Multimedia Expo Workshops (ICMEW), pages 597–
600.
Li, M., Chen, S., Chen, X., Zhang, Y., Wang, Y., and Tian,
Q. (2019). Actional-structural graph convolutional
networks for skeleton-based action recognition. In
CVPR.
Liu, J., Shahroudy, A., Xu, D., and Wang, G. (2016).
Spatio-temporal lstm with trust gates for 3d human ac-
tion recognition. In ECCV.
Liu, Y., Jiang, X., Sun, T., and Xu, K. (2019). 3d gait
recognition based on a cnn-lstm network with the fu-
sion of skegei and da features. 2019 16th IEEE Inter-
national Conference on Advanced Video and Signal
Based Surveillance (AVSS), pages 1–8.
Lohit, S., Wang, Q., and Turaga, P. K. (2019). Temporal
transformer networks: Joint learning of invariant and
Efficient Multi-stream Temporal Learning and Post-fusion Strategy for 3D Skeleton-based Hand Activity Recognition
301

discriminative time warping. 2019 IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 12418–12427.
Maghoumi, M. and LaViola, J. J. (2018). Deepgru: Deep
gesture recognition utility. In ISVC.
Moon, G., Chang, J., and Lee, K. M. (2018). V2v-
posenet: Voxel-to-voxel prediction network for accu-
rate 3d hand and human pose estimation from a single
depth map. In The IEEE Conference on Computer Vi-
sion and Pattern Recognition (CVPR).
Nguyen, X. S., Brun, L., L
´
ezoray, O., and Bougleux, S.
(2019). A neural network based on spd manifold
learning for skeleton-based hand gesture recognition.
2019 IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR), pages 12028–12037.
Ohn-Bar, E. and Trivedi, M. M. (2013). Joint angles sim-
ilarities and hog2 for action recognition. 2013 IEEE
Conference on Computer Vision and Pattern Recogni-
tion Workshops.
Ohn-Bar, E. and Trivedi, M. M. (2014). Hand gesture recog-
nition in real time for automotive interfaces: A multi-
modal vision-based approach and evaluations. IEEE
Transactions on Intelligent Transportation Systems,
15:2368–2377.
Oreifej, O. and Liu, Z. (2013). Hon4d: Histogram of ori-
ented 4d normals for activity recognition from depth
sequences. 2013 IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 716–723.
Rahmani, H. and Mian, A. S. (2016). 3d action recogni-
tion from novel viewpoints. 2016 IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 1506–1515.
Ramirez-Amaro, K., Beetz, M., and Cheng, G. (2017).
Transferring skills to humanoid robots by extracting
semantic representations from observations of human
activities. Artif. Intell., 247:95–118.
Rastgoo, R., Kiani, K., and Escalera, S. (2020). Hand sign
language recognition using multi-view hand skeleton.
Shi, L., Zhang, Y., Cheng, J., and Lu, H. (2018). Non-
local graph convolutional networks for skeleton-based
action recognition.
Si, C., Chen, W., Wang, W., Wang, L., and Tan, T. (2019).
An attention enhanced graph convolutional lstm net-
work for skeleton-based action recognition. In CVPR.
Smedt, Q. D., Wannous, H., and Vandeborre, J.-P. (2016).
Skeleton-based dynamic hand gesture recognition.
2016 IEEE Conference on Computer Vision and Pat-
tern Recognition Workshops (CVPRW), pages 1206–
1214.
Sridhar, S., Feit, A. M., Theobalt, C., and Oulasvirta, A.
(2015). Investigating the dexterity of multi-finger in-
put for mid-air text entry. In CHI ’15.
Surie, D., Pederson, T., Lagriffoul, F., Janlert, L.-E., and
Sj
¨
olie, D. (2007). Activity recognition using an ego-
centric perspective of everyday objects. In UIC.
Tang, Y., Tian, Y., Lu, J., Li, P., and Zhou, J. (2018).
Deep progressive reinforcement learning for skeleton-
based action recognition. 2018 IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
5323–5332.
Tekin, B., Bogo, F., and Pollefeys, M. (2019). H+o: Unified
egocentric recognition of 3d hand-object poses and in-
teractions. 2019 IEEE/CVF Conference on Computer
Vision and Pattern Recognition (CVPR), pages 4506–
4515.
Vemulapalli, R., Arrate, F., and Chellappa, R. (2014). Hu-
man action recognition by representing 3d skeletons
as points in a lie group. 2014 IEEE Conference on
Computer Vision and Pattern Recognition, pages 588–
595.
Wang, H. and Wang, L. (2017). Modeling temporal dynam-
ics and spatial configurations of actions using two-
stream recurrent neural networks. 2017 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 3633–3642.
Wang, L., Huynh, D. Q., and Koniusz, P. (2019). A compar-
ative review of recent kinect-based action recognition
algorithms. IEEE Transactions on Image Processing,
29:15–28.
Yan, S., Xiong, Y., and Lin, D. (2018). Spatial temporal
graph convolutional networks for skeleton-based ac-
tion recognition. In AAAI.
Ying, X. (2019). An overview of overfitting and its solu-
tions.
Yuan, S., Garcia-Hernando, G., Stenger, B., Moon, G.,
Yong Chang, J., Mu Lee, K., Molchanov, P., Kautz,
J., Honari, S., Ge, L., Yuan, J., Chen, X., Wang, G.,
Yang, F., Akiyama, K., Wu, Y., Wan, Q., Madadi, M.,
Escalera, S., Li, S., Lee, D., Oikonomidis, I., Argy-
ros, A., and Kim, T.-K. (2018). Depth-based 3d hand
pose estimation: From current achievements to future
goals. In The IEEE Conference on Computer Vision
and Pattern Recognition (CVPR).
Zanfir, M., Leordeanu, M., and Sminchisescu, C. (2013).
The moving pose: An efficient 3d kinematics descrip-
tor for low-latency action recognition and detection.
2013 IEEE International Conference on Computer Vi-
sion, pages 2752–2759.
Zhang, C., Yang, X., and Tian, Y. (2013). Histogram of
3d facets: A characteristic descriptor for hand gesture
recognition. 2013 10th IEEE International Confer-
ence and Workshops on Automatic Face and Gesture
Recognition (FG), pages 1–8.
Zhang, X., Qin, S., Xu, Y., and Xu, H. (2019). Quaternion
product units for deep learning on 3d rotation groups.
ArXiv, abs/1912.07791.
Zhang, X., Wang, Y., Gou, M., Sznaier, M., and Camps, O.
(2016). Efficient temporal sequence comparison and
classification using gram matrix embeddings on a rie-
mannian manifold. 2016 IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR).
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
302
