
The Proposal of Double Agent Architecture using Actor-critic Algorithm
for Penetration Testing
Hoang Viet Nguyen
1
, Songpon Teerakanok
2 a
, Atsuo Inomata
3
and Tetsutaro Uehara
1 b
1
Cyber Security Lab, College of Information Science and Engineering, Ritsumeikan University, Japan
2
Research Organization of Science and Technology, Ritsumeikan University, Japan
3
Graduate School of Information Science and Technology, Osaka University, Japan
Keywords:
Penetration Testing, Deep Reinforcement Learning.
Abstract:
Reinforcement learning (RL) is a widely used machine learning method for optimal decision-making com-
pared to rule-based methods. Because of that advantage, RL has also recently been used a lot in penetration
testing (PT) problems to assist in planning and deploying cyber attacks. Although the complexity and size
of networks keep increasing vastly every day, RL is currently applied only for small scale networks. This
paper proposes a double agent architecture (DAA) approach that is able to drastically increase the size of the
network which can be solved with RL. This work also examines the effectiveness of using current popular
deep reinforcement learning algorithms including DQN, DDQN, Dueling DQN and D3QN algorithms for PT.
The A2C algorithm using Wolpertinger architecture is also adopted as a baseline for comparing the results
of the methods. All algorithms are evaluated using a proposed network simulator which is constructed as a
Markov decision process (MDP). Our results demonstrate that DAA with A2C algorithm far outweighs other
approaches when dealing with large network environments reaching up to 1000 hosts.
1 INTRODUCTION
Nowadays, the rapid development of network infras-
tructure has been increasing the risk of network vul-
nerability. Penetration testing (PT) that is being used
widely in many systems has been seen as an impor-
tant approach in the development of network protec-
tion. The main purpose of the approach is protecting
the system from potential attacks by simulating real-
life hacker’s activities trying to find and attack all the
existing security vulnerabilities on the network.
However, there are still many things that prevent
organizations from accessing the advantages of PT.
PT is often considered an expensive approach, per-
forming it consumes a lot of resources including man-
power. The operator who has a wide and deep knowl-
edge of security is required to perform PT. Using au-
tomatic PT instead of depending on human resources
is a popular approach to solve these problems. Cur-
rently, many frameworks and tools supporting PT
have been developed such as Metasploit, Nessus and
Tenable. Unfortunately, these tools usually only sup-
a
https://orcid.org/0000-0002-1058-149X
b
https://orcid.org/0000-0002-8233-130X
port security experts in scanning vulnerabilities rather
than assist them exploitation.
In recent years, machine learning (ML) is open-
ing up a new approach in effectively solving complex
problems. ML has been proven that it is able to deal
with difficult problems more quickly and accurately
than humans in some cases (Chui et al., 2016). Re-
inforcement learning (RL) a type of ML has received
great attention lately. RL is able to make a sequence
decision to interact with an unstable environment in
order to get the best reward out of it (Kaelbling et al.,
1996). Unlike supervised learning, the RL agent finds
the good way to adapt to the environment by itself
without needing pre-labelled data.
The ability of RL shows that it is perfectly suited
to be used to solve PT problems. Leveraging the
power of RL in unstable environments is a good ap-
proach to conduct PT while the RL agent can auto-
matically decide the action needed to perform. In fact,
there are a few researchers who pursued this direction
and have achieved some promising results. Schwartz
et al. showed that RL algorithms are able to search for
the good root of exploiting network and find the attack
policy that successfully attacks all target machines
(Schwartz and Kurniawati, 2019). Ghanem et al., on
440
Nguyen, H., Teerakanok, S., Inomata, A. and Uehara, T.
The Proposal of Double Agent Architecture using Actor-critic Algorithm for Penetration Testing.
DOI: 10.5220/0010232504400449
In Proceedings of the 7th International Conference on Information Systems Security and Privacy (ICISSP 2021), pages 440-449
ISBN: 978-989-758-491-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

the other hand, proposed the ability to combine RL
with existing PT frameworks to perform tasks with
no human interference (Ghanem and Chen, 2020).
Despite achieving many promising results, all
above-mentioned approaches, unfortunately, have a
fundamental limitation in the size of the environment
that can be solved. To be clear, this limitation does
not only appear when using RL with PT but also is a
general problem of RL. Schwartz et al. showed that
their algorithm performance rapidly decreases when
the network has more than 43 machines (Schwartz
and Kurniawati, 2019). IAPTS, a POMDP approach,
tried to improve the efficiency on large networks, is
tested with a maximum of 100 machines (Ghanem
and Chen, 2020). Using a multi-level system, 4AL, a
promising model-based method, maintains its perfor-
mance when the size of the environment reaches 100
machines and 100 services (Sarraute et al., 2013).
In this paper, we propose a double agent architec-
ture (DAA) which use a popular RL algorithm called
the advantage actor-critic algorithm (A2C) (Mnih
et al., 2016) to conduct PT in large networks. DAA
uses model to attack environments in term of Markov
decision processes (MDP). The aim of DAA is to
be able to do PT on a large network system having
around 1000 machines by remains its performance.
DAA utilizes a network simulator that is built by in-
heriting and developing the features of the network
attack simulator (NAS) (Schwartz and Kurniawati,
2019). The network simulator is then translated into
an MDP problem to be determined by agents. The
A2C algorithm using Wolpertinger architecture (WA)
with multiple level action embedding is also adopted
as a baseline for comparing the results (Hoang et al.,
ress).
The main contributions in this paper are summed
up as follows:
• We build a JSON format network simulator that is
implemented based on the NAS. To add practical-
ity and complexity to the network simulator, there
is a few extension rules have been proposed.
• Testing the effectiveness of some popular deep re-
inforcement learning (DRL) algorithms such as
DQN, DDQN, Dueling DQN and D3QN when us-
ing in PT.
• A robust DRL architecture has been proposed
called double agent architecture (DAA) leverag-
ing the power of the actor-critic algorithm and
multi-agent architecture to conduct PT in the large
environment but maintain the performance. DAA
contains two agents, while the first one is used
to learn about the network structure of a network,
the second one helps to choose the appropriate ex-
ploitable service for the machine selected.
• We have conducted experiments on different net-
work size with various attack scenarios. The im-
pact of size on the performance of the algorithms
are compared. The results showed that DQN fam-
ily algorithms and WA can solve the network hav-
ing less than 30 and 256 machines respectively,
while the DAA works for around 1000 hosts and
still remain the performance 81%. The result of
DAA, which is superior to other algorithms, is a
testament to DAA’s ability to perform PT in large
networks.
This paper is organized as follows. Section 2
introduces the literature review about related works.
The design of the network simulator is described in
Section 3. In Section 4, the detailed structure of the
DAA is discussed. This section also discusses the im-
plementation of Wolpertinger architecture using for
comparison. Section 5 reports conducted experiments
and analyze the results. Finally, the last section sum-
maries this study concludes.
2 LITERATURE REVIEW
2.1 Reinforcement Learning Algorithms
RL approach tries to maximizing the cumulative re-
ward from the environment to find a good plan (Kael-
bling et al., 1996). At first, RL is usually seen in
game theory and information theory. However, in
early years, applying RL method is considered un-
successful, until Mnih et al. proposed the method
named DQN that combine deep neural network with
Q-learning (Mnih et al., 2013). The proposed method
became a huge success and its results demonstrate
that RL approach can be used effectively on real-
world problems. Q-learning has been improved
by many researchers ever since. Many techniques
such as experience replay and double Q-learning are
adopted to improve the performance of RL. RL al-
gorithms commonly used today can be mentioned as
DQN , DDQN (Hasselt, 2010), Dueling DQN (Du-
elling DQN) (Wang et al., 2016) and Duelling Double
Deep Q Network (D3QN) .
Although previous RL approaches have been
proven to be effective, it is still limited to fairly
low-dimensional problems and lacks scalability. This
problem is considered a big challenge for researchers
working in the field. Wolpertinger architecture (WA)
using actor-critic algorithm tried to solve the environ-
ment having large action space by adding action em-
bedding and kNN layers (Dulac-Arnold et al., 2015).
The idea of WA is by finding the max-values action
The Proposal of Double Agent Architecture using Actor-critic Algorithm for Penetration Testing
441

from similar action set, the agent can be able to find
the best one. In the previous work, we proposed a
multiple level action embedding that can accurately
represent the relationship between actions in the RL
action space (Hoang et al., ress). This approach can
be used to apply WA for solving PT problems.
2.2 Automatic Penetration Testing
Many automatic PT methods have been developed.
These methods often focus on automatic planning. At
first, the research considered PT as a decision-making
problem and used graph methods like decision tree or
attack graph (Phillips and Swiler, 1998). Sarraute et
al. attempt to solve such issue by using multi-level
architecture called 4AL (Sarraute et al., 2013). It di-
vides the PT process into four levels: decomposing
the network, attacking components, subnetworks and
individual machines. The system built as a partially
observable Markov decision process (POMDP) has
proven to be useful to a large number of machines
and exploits. Unfortunately, the number of exploits
and machines tested in this article just stops at around
100.
In recent years, scientists have paid more atten-
tion to using RL to apply to PT automation. Schwartz
et al. built network attack simulator (NAS) and uses
tabular Q-learning and DQN algorithms to solve such
problems (Schwartz and Kurniawati, 2019). The ex-
periments of this article which apply to many different
network architectures assert that RL is completely ca-
pable of solving PTs. However, the article also points
out that with networks with too many machines or
services, the performance of these algorithms will de-
crease significantly, even unsolvable.
Ghanem et al. proposed a system called IAPTS
(Ghanem and Chen, 2020). This system uses the
RL to make attack decisions and uses PT frameworks
such as Metasploit to attack. The system also uses
expert validation to monitor the output of the system
to help the agent be able to make more accurate deci-
sions. Unlike the above paper, the PT of the paper is
represented in the form of POMDP and uses the algo-
rithm PEGASUS to solve. However, like the previous
articles, this article is only used on medium and small
environments (from 10-100 machines). The number
of services used is not mentioned in the article.
3 THE NETWORK SIMULATOR
This section contains two main parts: an introduc-
tion to the network simulator used to perform pen-
etration testing and a description of how to convert
network simulator information into MDP format. In
the first part, the paper proposes a network simulator
built based on NAS (Schwartz and Kurniawati, 2019),
however, some new rules added to improve the com-
plexity of the simulator compared to the previous one.
Second, representing in MDP format is necessary for
PT problems to be solved by RL algorithms. Further
explanation of how to convert PT problems into the
right format to use as an input of RL will be discussed
in section 3.2.
3.1 The Network Model
The network built based on NAS (Schwartz and Kur-
niawati, 2019) contains basic components such as
subnets, connections, hosts, services and firewalls.
These components are defined in JSON format and
are loaded when needed. This makes the network
simulator can be deployed fast and be able to run in
different systems. While our connections, firewalls
and services contain changes in format and structure,
there are also some significant additional rules applied
in subnets and hosts. The purpose of these rules is to
make the attack process on the PT environment more
difficult for attackers comparing to NAS.
3.1.1 Subnets
Sub-networks (subnets) are the basic components
making up each network. By default, every host in
a subnet is directly connected and can communicate
with each other. Subnet address and subnet mask are
used to define a subnet. While the address identifies
which host belongs to which subnet, the maximum
number of machines in each network is determined by
the subnet-mask. Hosts on a different subnet can not
communicate with each other. The network connec-
tions and firewalls control communication between
subnets.
When deploying a network attack on our environ-
ment, there are several rules that attackers must fol-
low:
• A subnet is considered reachable to attackers if
they have successfully attacked at least one host
on the subnet which directly connect to it.
• Attackers, at first, do not know how the subnets
are connected.
• Attackers, by default, know the number of subnets
but do not know the number of machines in each
subnet, even if the subnet is currently reachable to
the attacker. To be able to gather this information,
attackers have to scan the subnet first.
• If the subnet is unreachable, scanning it do not
gain any information to attackers.
ICISSP 2021 - 7th International Conference on Information Systems Security and Privacy
442

3.1.2 Hosts
A host represents a device that existed in a network
and runs certain services. IP addresses are an im-
portant component to differentiate hosts from each
other. In the network simulator, there are two types
of hosts: normal hosts and sensitive hosts. Sensitive
hosts are hosts that contain important information that
is needed to be protected from adversaries.
Services that are running on each host can be com-
municated with other hosts in the same or neighbour
subnet. Each host can run different services because,
in reality, not all machines have the same configura-
tion or running services. Services are seen as vulner-
abilities that attackers can exploit using appropriate
action. Each service is defined by an ID and two ad-
ditional information, a score and a cost. The service
score represents the probability of the exploitation of
service success. For example, if the score of a ser-
vice is set to 100, then attacks on this service are al-
ways successful. The cost of the service represents
how difficult to perform an attack on that service.
To exploit a host in the network simulator, the at-
tackers must also comply with the following rules
• Any action on the host takes effect only when the
host is contained in a scanned subnet
• Attackers, at first, do not know which services
are running in the hosts. This information can be
gained after the host is scanned.
• Attackers can exploit a host when having informa-
tion about which service is running in the hosts.
• Exploitation on the host is only counted as suc-
cessful when it is hacked into the service running
on the host. Even that, it is still possible that the
attack fails to depend on the score of the service.
3.2 Representing Penetration Testing as
Reinforcement Learning Problems
In reinforcement learning, all problems need to be
represented in a proper form before it can be solved.
It depends on the designer’s intentions in training the
agent. In this paper, the network pentesting prob-
lem is modelled as an MDP defined by {S,A,R ,T }.
States (S ) are defined as full knowledge about the cur-
rent network. Actions (A) present the possible actions
can be performed for each host and subnet on the net-
work. The reward function (R ) calculates how good
the attacker exploit the network based on certain rules.
The result of performing each action is determined by
the transition function (T ).
3.2.1 State
A state, s ∈ S is defined as the knowledge of all hosts
existed on the network. Particularly, the state is a
vector including information of all hosts. This in-
formation is the host state including attacked state,
reachable state and which service is running on it.
To be clear, each bit in a state vector can belong to
one of three types: reachable state, attacked state and
services state. First, for the reachable state, a bit
can be assigned these value reachable, unreachable
or unknown. Second, if a bit belongs to the attacked
state, it can receive attacked, not attacked or unknown
value. Finally, if a bit represents for a state of a ser-
vice on a host, it can have one of three values avail-
able, unavailable and unknown.
Figure 1: Defining the state space from network informa-
tion.
Although the information about the subnet is not
contained in the state, it plays a crucial role in deter-
mining the current state of hosts. A subnet can receive
unknown, reachable, and scanned states. The subnet
is given an unknown state when an attacker does not
know the existence of that subnet. The subnet receives
reachable and scanned states following the set of rules
applied on subnets mentioned above.
The state of a subnet has a direct influence on the
state of hosts in it. A host is considered unknown
when the subnet has not been scanned because at
this point the attacker does not know any information
about the host. A host is considered reachable when
it is contained in a scanned subnet. Finally, a host re-
ceives an attacked state if an exploit has successfully
been used on it.
The state-space includes all possible states of each
host including the knowledge about services running
on it. Therefore, if the number of machines and ser-
vices on the network increase, the state space will
grow vastly. The equation 1 shows the state space
size, | S |, where E is the number of exploitable ser-
vices and H is the number of hosts in the network. The
number 2 represents information about the reachable
and attacked state of a host. Because every bit in a
state vector can receive three possible values, the state
space is the exponent of 3.
|S| = 3
(E+2)×H
(1)
For the equation 1, there are some elements that
worthwhile to consider. Although each host has a dif-
The Proposal of Double Agent Architecture using Actor-critic Algorithm for Penetration Testing
443

ferent number of running services, the number of ser-
vice state is the same. Whether a service runs on a
host or not, it can still be assigned one of three val-
ues ”available”, ”unavailable” or ”unknown”, corre-
sponding to 1, 0 and -1. Therefore, in a state vector,
each host is always represented by a number equals to
(E + 2) bits.
3.2.2 Action
The action space A is defined as the set of all actions
within the network simulator. There are three types of
action including scan subnets, scan hosts and exploit
services. The scan subnets action includes a single
scan action for each subnet, while the scan hosts ac-
tion is scanning for each host. The exploit services
action has an exploit for each service and each host
on the network.
The scan hosts action simulates the Nmap scan-
ning. It gives users information about current run-
ning services and its related information such as open
ports, service name and service version. Meanwhile,
the scan subnets action is related to host discovery
giving all IP address of hosts running on the subnet.
Every service on the network has a matching ex-
ploit action. The target host will be counted as at-
tacked if an exploit action successfully conducts on
it. Determining the success of any exploit action is
checking the set of conditions such as the reachable
state of the target host, the availability of the ser-
vice based on the firewall rules and the action success
probability.
The number of actions | A | is the total number of
three types of actions: scan subnet, scan hosts and ex-
ploit services. It is calculated by the number of subnet
S, the number of host H and the number of exploitable
service E as follows:
|A|& = S + H + H ×E (2)
Each action also has a cost which represents any
real metric such as the time, monetary cost and skill
needed.
3.2.3 Transition
The transition function, T , shows how the environ-
ment reacts with performed actions. The next state is
determined based on the success of the action. The
change in the next state depends on several factors
such as the reachable ability of the action target and
what type of action being used. These factors are
strongly related to the set of rules defined in the net-
work simulator (section 3.1)
3.2.4 Reward Function
In any RL problem, the reward is always a crucial
component. It is a compass that instructs the agent
whether the action taken in the current state is correct.
The reward is defined by the function R (s, a, s’), from
state s agent take an action a and finally receive state
s
0
as the result.
The reward for transitions is the value of any
newly successful attacked host minus the cost of the
selected action a. For any action that changes the state
of the environment, the little amount of reward r
0
is
added to encourage the agent. When the agent suc-
cessfully attacks a normal host, the reward r will be
given to the agent. In the network simulator, 10% of
hosts are sensitive hosts containing important infor-
mation. When successfully attacking these hosts, the
reward will be (H
normal
/H
sensitive
) × r. This formula
ensures that the total reward received if attacking sen-
sitive hosts will be equal to the total reward received
when attacking normal hosts. This strikes a balance
between the agent’s attempting to successfully attack
sensitive hosts and expanding the reach area by at-
tacking normal hosts.
4 THE DOUBLE AGENT
ARCHITECTURE (DAA)
4.1 Introduction
All reinforcement learning architectures contain two
main components an environment and an agent. The
basic architecture often has only one agent which di-
rectly interacts with the environment. The environ-
ment represents the problem that needs to be solved.
The agent which has a core of RL algorithms is re-
sponsible for finding out the best solution for the
problems in the environment. To do that, the agent
continuously interacts with the environment by using
appropriate actions. At first, the selected actions are
not optimized, but based on the feedback information
(including new states and rewards) sent by the envi-
ronment, the agent updates its policy and gradually
makes more accurate choices.
When applying RL to PT problems, these proper-
ties and behaviour of the agent and the environment
are retained. Previous articles have shown that, in
this way, RL algorithms is still capable of searching
for the good root of successful exploiting target ma-
chines on a network (Schwartz and Kurniawati, 2019)
(Ghanem and Chen, 2020). However, when the num-
ber of hosts and services is too large, its complexity
ICISSP 2021 - 7th International Conference on Information Systems Security and Privacy
444
will increase exponentially. This leads to the situation
that the agent is no longer able to solve the problem.
Sarraute et al. proposed 4AL algorithm, a domain-
specific algorithm, using a multi-level system split-
ting the PT process into four levels including decom-
posing the network, attacking components, attacking
subnetworks, and attacking individual machines (Sar-
raute et al., 2013). The results of the paper show that
this concept is capable of scaling up performance in
solving PT in large environments (tested for up to 100
machines).
Inspired by the concept of dividing the PT pro-
cess, this paper proposes the double agent architec-
ture (DAA) that divides the PT problem into two
steps including understanding the network structure
(network topology) and choosing an appropriate ex-
ploitable service to attack a certain host. Applying
to RL, instead of using only one agent, DAA uses
two separate agents, each agent undertakes a different
step. This approach is possible to reduce significantly
the action space and the state space of PT problem
that each agent must solve. Thus, the DAA can be
applied to problems with a large number of hosts and
services.
4.2 Design
As mentioned in 4.1, the state space size and the ac-
tion space size depend greatly on the number of hosts,
subnets and services. This leads to the situation that
RL algorithms no longer have the ability to learn to
solve problems in such a large environment. In order
to solve these problems, this paper proposes an idea
that uses two separate agents for learning the network
structure and choosing an appropriate service to ex-
ploit a certain host. The structuring agent is responsi-
ble for learning about the network structure including
subnets, hosts, firewalls and the connections between
subnets. Meanwhile, the exploiting agent is responsi-
ble for picking out the service that is most likely to be
a successful attack in a certain host.
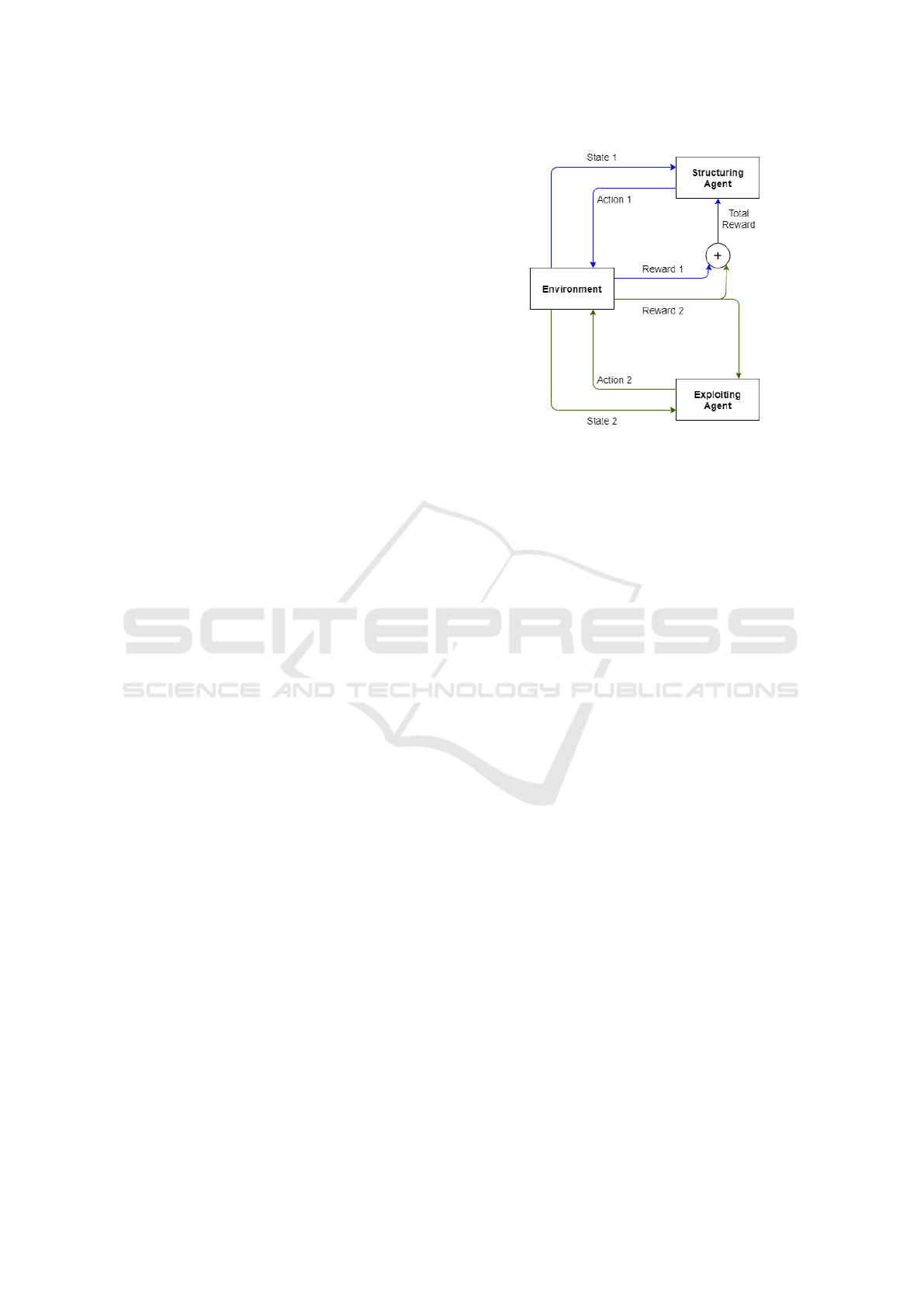
The coordinating of two agents is shown on the
figure 2. At first, the structuring agent observes the
environment and gets a state s
1
from this observation.
In the case the agent thinks that the received state still
lacks structural information, i.e. the agent thinks it
can explore the network more deeply, it will choose
structural discovery actions including hosts and sub-
nets scanning. When executing these commands, the
agent receives an immediate reward r
1
from the envi-
ronment and uses it to evaluate the correctness of the
action. In the other case, if the agent considers that
it is acceptable to collect information or exploit ser-
vices of a certain host, because of the lacks of service
Figure 2: Double agent architecture.
information, it will not directly make decisions but do
the action that will trigger the exploiting agent.
The exploiting agent once enabled, will use the
state of the selected host as its input (state 2). The se-
lected host’s state information will now include the
reachable, attacked state and information about the
services running on it. At this point, if the agent con-
siders that the information is not enough, it can con-
tinue to execute the scan hosts command, otherwise, it
can exploit the host with the appropriate service. Af-
ter the exploiting agent action, the environment will
give the agent an immediate reward r
2
. The exploiting
agent uses this reward to update its policy. The struc-
turing agent is also aware of this reward and uses the
sum of r
1
and r
2
as the result of its action that triggers
the exploiting agent. If the action that the structuring
agent chooses is scan hosts or scan subnets then r
2
is
considered 0. Finally, the structuring agent uses the
total reward to update its policy.
The use of the double agent not only reduces sig-
nificantly the action space and the state space of PT
but also increases the agent’s learning speed. In ad-
dition, separating into two agents also helps to reuse
the agents. For example, when the number of services
in the network changes, we only need to train the ex-
ploiting agent individually. On the other hand, when
there is a change in the network structure but there is
no change in the number of services, it is completely
possible to train the chosen network separately with-
out needed to retrain the exploiting one.
4.3 The Environment for Double Agent
Approach
The first issue we need to consider when adopting this
approach is needed changes in the built environment
The Proposal of Double Agent Architecture using Actor-critic Algorithm for Penetration Testing
445

to fit into the new architecture. However, this change
should be as little as possible to avoid the case that it
is too different from the original environment and can
be viewed as different problems. Therefore, this paper
only proposes very small changes to the current envi-
ronment so that the environment can be used by both
the original method and the double agent method.
4.3.1 State
The state space has not been changed when using
DAA. The only difference is that we have to filter the
matching state space information as input to agents.
The state of the structuring agent will include the
reachable and attacked state of all hosts on the net-
work. From the perspective of the pentesting operator,
we totally know the total number of hosts currently on
the network so this filtering can be done easily. The
size of the state space of the first agent is
|S
1
| = 3
2H
(3)
On the other hand, the exploiting agent’s state will
be details of the selected host including reachable, at-
tacked state and all information about that exploitable
services. The state space size of the exploiting agent
is
|S
2
| = 3
E
(4)
With this size, agents can completely solve the
problem even though the number of hosts and services
increases. The complexity is now much smaller than
before
4.3.2 Action
The action space of the environment as mentioned
above includes three types: scan subnets, scan hosts
and exploit services. The selection of scan actions,
including scan hosts and scan subnets, can be deter-
mined by the structuring agent to retrieve information
about the network structure. However, this agent can-
not decide whether to exploit service or which service
should be used to exploit the machine. Therefore,
an extension action named choose hosts is added to
this agent. This action is chosen when the structur-
ing agent think that there is a host that is likely suc-
cessfully attacked but the agent can not handle such
information. Instead, it sends the current host infor-
mation to the exploiting agent and let this agent take
responsibilities.
With the information received from the structur-
ing agent, the exploiting agent is able to decide which
exploit service is available on the host. At this point,
it can choose between exploiting the host using such
service or scanning the host to retrieve more informa-
tion.
With this approach, the structuring agent can
choose actions including scan subnets, scan hosts and
choose hosts, meanwhile, the exploiting agent can
choose actions which works on a certain host such
as scan hosts and exploit services on a host. Thus,
the action space size of agents has been significantly
reduced as follow.
|A
1
| = S + 2H (5)
|A
2
| = H + E (6)
4.3.3 Reward Function
Although the reward function does not change, there
is a little bit different when using this reward to train
agents. For the exploiting agent, the agent still re-
ceives the immediate reward in interacting with the
environment. For the structuring agent, the two ac-
tions scan subnet and scan host still receive an imme-
diate reward. However, the new action, choose host, is
a little different. The results of the choose host action
are available only after we have finished running the
exploiting agent. In other words, the result of choose
host will be the sum of the immediate reward of the
structuring agent and the exploiting agent.
4.4 The Neural Network of Agents
Neural networks used for agents are built based on
actor-critic algorithms. This article uses the advan-
tage actor-critic algorithm (A2C) (Mnih et al., 2016)
for its efficiency and ease of implementation. In gen-
eral, both agents have a relatively similar neural net-
work structure in terms of the number of hidden layers
and learning parameters. The required parameters for
the A2C algorithm have been constructed according
to the previous article (Mnih et al., 2016). However,
there is a slight change in the number of neurons per
hidden layer, because of the difference in the input
size. The actor and critic networks of each agent share
the same configuration.
To determine the most suitable hyper-parameters
value for neural networks, a tuning process has been
performed. The table 1 describes more clearly param-
eters used and the differences in the configuration of
neural networks.
5 EXPERIMENTS AND RESULTS
To test the performance of the proposed approach,
two experiments will be conducted. The first ex-
ICISSP 2021 - 7th International Conference on Information Systems Security and Privacy
446
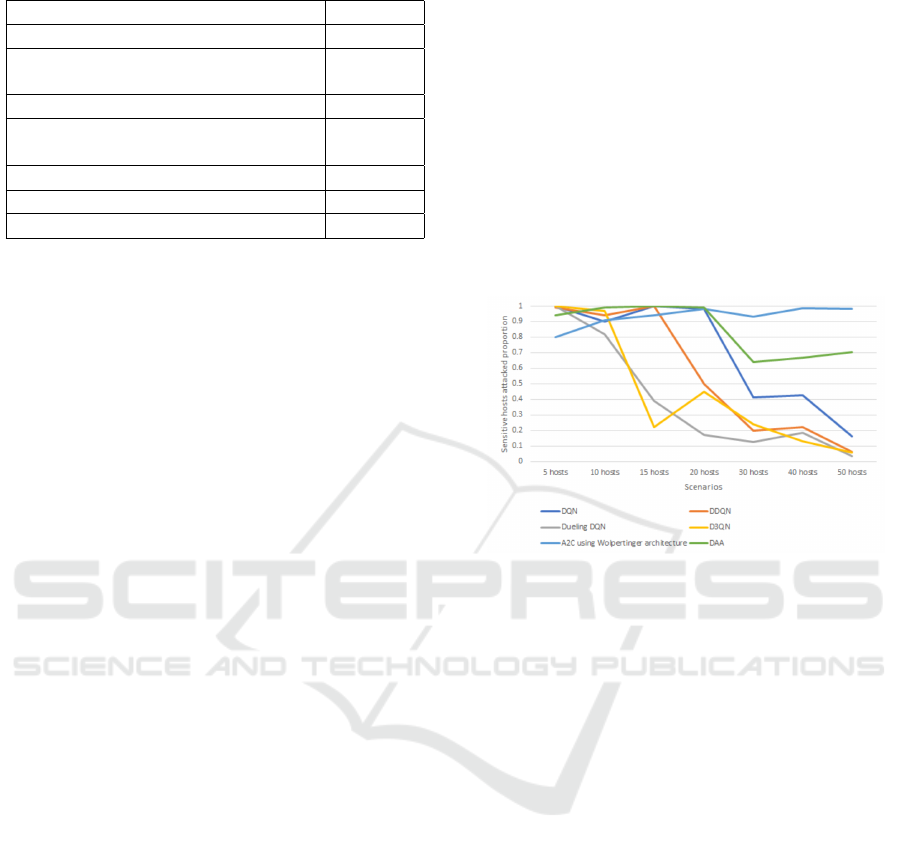
Table 1: Agent’s network parameters.
Parameter Value
No. hidden layers (structuring agent) 3
No. neurons per hidden layer (struc-
turing agent)
512
No. hidden layers (exploiting agent) 3
No. neurons per hidden layer (ex-
ploiting agent)
50
Learning rate
5 × 10
−3
Discount factor 0.99
Entropy coefficient
5 × 10
−3
periment is used to evaluate the results of DAA, the
DQN family algorithms and the A2C algorithm using
Wolpertinger architecture with multiple level action
embedding (Hoang et al., ress) in the case of small
networks. The second experiment is to compare the
results between Wolpertinger architecture (WA) and
DAA. Metrics are used to evaluate the results of ex-
periments including the reward gained during training
and the proportion of sensitive hosts being success-
fully attacked.
These experiments are conducted to answer the
following questions:
• Can DQN family algorithms such as DDQN, Du-
eling DQN and D3QN as well as A2C algorithm
using WA and DAA be used to solve PT prob-
lems?
• Does apply a DAA increase problem-solving per-
formance in large environments, especially when
compared to WA?
• What is the maximum size of the network that
these algorithms can handle?
The experiments use the auto-generated scenar-
ios with the number of hosts ranging from 5 to 1024
and the number of services from 2 to 100. Scenario
configurations contain all components and follow the
rules of the network simulator in section 3.1. Each
host in a scenario contains a different number of run-
ning services. For each service, the score value is ran-
domized from 40-90%.
An Unbuntu computer using NVIDIA GeForce
RTX 2080 Ti 11GB GPU and AMD Ryzen 9 3900X
CPU is used to conduct these experiments
5.1 The Experiment Conducted on
Small Network Environments
In this test, we designed and implemented several net-
works on different sizes. The number of hosts (H) on
each network is ranging from 5 to 50 hosts. In which,
the number of sensitive hosts is 2 for scenarios with
less than 20 hosts, and 10% of normal hosts for sce-
narios with 20 or more hosts. In these scenarios, the
number of subnets is set to 7 while the number of ex-
ploitable services running on each host is 2.
In each training session, there are 1000 episodes
running. In each episode, the maximum number of
actions the agent can perform is 2 × (S + 2H). Hypo-
thetically, the optimal number of actions the agent can
perform is S+2H which includes scanning all subnets
at least once, scanning all hosts at least once, and suc-
cessfully attacked the service on each host with just
one attempt. Because this optimal value is difficult
to achieve, the algorithm uses 2 times this value per
episode.
Figure 3: The sensitive machine attack proportion result of
algorithms using different scenarios.
The figure 3 shows the results of algorithms with
different scenarios. With the number of hosts less
than 20, the results of the algorithms are not much dif-
ferent when DQN (Mnih et al., 2013), A2C using WA
(Dulac-Arnold et al., 2015) and DAA all reach over
90%. However, with scenarios where the number of
hosts is greater than 20, we find that the performance
of A2C using WA and DAA far outweighs the DQN
algorithms. In a scenario with 50 hosts, while the
DQN algorithms have a sensitive host attacked pro-
portion is less than 20%, the proportion in the DAA is
70% and A2C using WA remains at 99%.
The reason the DAA in this experiment is not per-
forming so well is that it used only 1000 episodes for
training. Because of using both agents to learn the
network, DAA is converging slower than DQN algo-
rithm and A2C using WA. Therefore, the experiment
using a small number of episodes has not shown all
the capabilities of DAA.
The experiment result can be explained when we
look at the reward received in the training of algo-
rithms (figure 4). In a scenario with 5 hosts, we
see that with 1000 episodes, DQN algorithms tend
to learn and converge faster than A2C using WA and
DAA. However, when the number of hosts is too large
(50 hosts), the DQN algorithms are no longer able to
The Proposal of Double Agent Architecture using Actor-critic Algorithm for Penetration Testing
447
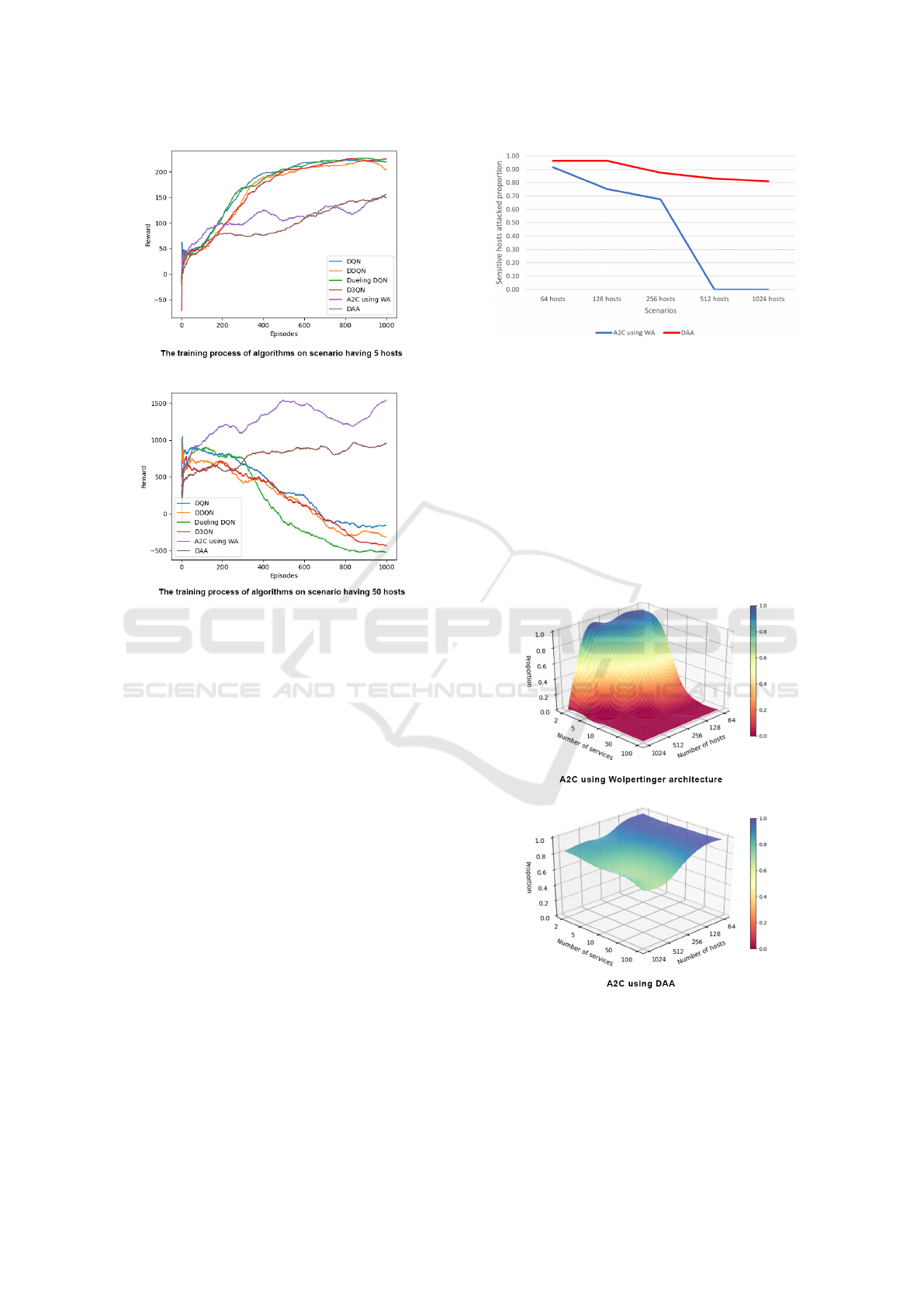
Figure 4: Rewards obtained by algorithms during the train-
ing process.
learn while A2C using WA and DAA still retain their
ability to learn in the environment.
5.2 The Experiment Conducted on
Large Network Environments
In this test, we still designed and implemented sev-
eral networks on different sizes to test performance
for A2C using WA and DAA. The other algorithms
retain poor performance (0%) for scenarios having
more than 50 machines, so we do not consider them in
this experiment. Because we are testing on large net-
work environments, the number of hosts (H) on each
network this time is ranging from 64 to 1024 hosts. In
which, the number of sensitive hosts is 10% of normal
hosts for all scenarios. In these scenarios, the number
of subnets is set to 20 while the number of exploitable
services running on each host is 5. In each training
session, there are 10000 episodes running. In each
episode, the maximum number of actions the agent
can perform remains 2 × (S + 2H).
The figure 5 shows the results of A2C using WA
and DAA with different scenarios. With a scenario
with less than or equal to 128 hosts, both architec-
tures have performance over 80%. However, with a
scenario with a host of more than 512, A2C with WA
Figure 5: The sensitive machine attack proportion result of
A2C algorithm using WA and DAA.
reaches its limit and is not capable of attacking sen-
sitive hosts (0%). Meanwhile, the DAA kept its per-
formance and the proportion of sensitive hosts being
successfully attacked was still 81% in a scenario with
1024 hosts.
To better understand the scale-up of architectures,
we keep the same parameters of the above experiment
but change the number of exploit services running on
each machine. The number of exploitable services (E)
on each host this time is ranging from 2 to 100 ser-
vices.
Figure 6: Results of A2C algorithm using WA and DAA
with different scenarios and number of exploitable services.
Based on the results showed in figure 6, we can see
that the performance of A2C using WA is greatly af-
fected by both the number of hosts and the number of
exploitable services. As these two numbers increase,
ICISSP 2021 - 7th International Conference on Information Systems Security and Privacy
448

A2C with WA is incapable of solving the problem. In
contrast, DAA is slightly affected by the number of
hosts but is not affected by the number of exploitable
services. When the number of services running per
machine increases, the DAA retains its performance
around 70%, while WA fails to resolve these scenar-
ios. Given these points, the data show that DAA out-
performs WA in large environments.
The reason for such results is because the DAA
uses two different agents to learn about the network.
When the number of services increases in the range
from 2 to 100, this complexity is still in processing
capability of the exploiting agent, so the performance
of DAA is almost not affected. Likewise, the struc-
turing agent is capable of handling a number of hosts
between 5 and 1024. In contrast, the agent of WA has
to deal with host and service proliferation at the same
time. Because the complexity increases exponentially
when both of these values increase, the performance
of WA drops rapidly to the point where it is no longer
capable of solving problems. Therefore, DAA is su-
perior to WA as well as other algorithms when per-
forming PT in complex environments.
6 CONCLUSIONS
The study is focusing on the investigation into the ap-
plication of RL to pentesting. The proposed archi-
tecture named double agent architecture is built based
on two separate agents in order to improve the per-
formance and accuracy of RL when applied to large
network environments. The paper also conduct ex-
periments to test the efficiency of DQN algorithms to
evaluate its use in PT problems.
The main contribution of the paper is to increase
RL’s ability to solve the PT problem when the net-
work is large. By dividing the PT problem into dif-
ferent subproblems including learning the structure of
the network and learning how to choose the appropri-
ate attack on the individual host, the double agent ar-
chitecture has been proven to be impressive efficient.
This method opens another approach when using RL
to solve PT problems in the future.
Experimental results show that DAA outperforms
other algorithms when solving PT problems with
large networks. The size of scenarios can reach up
to 1024 hosts and 100 services, and the DAA’s ability
to successfully attack sensitive hosts remains above
70%. With the number of exploitable services is less
than 10, the performance of this architect with a net-
work having 1024 hosts is up to 81%.
One of limitations of our work is that using the
network simulator which is a high level of abstrac-
tion will cause a gap between studying and applying
the problem in practice. The main direction for future
work is proposed to use a more realistic environment
such as VMs or real network as the input to the DAA.
Frameworks and tools such as Metasploit and Nes-
sus can be implemented to be able to more accurately
evaluate method results in practice.
REFERENCES
Chui, M., Manyika, J., and Miremadi, M. (2016). Where
machines could replace humans—and where they
can’t (yet). McKinsey Quarterly, 30(2):1–9.
Dulac-Arnold, G., Evans, R., van Hasselt, H., Sunehag,
P., Lillicrap, T., Hunt, J., Mann, T., Weber, T., De-
gris, T., and Coppin, B. (2015). Deep reinforcement
learning in large discrete action spaces. arXiv preprint
arXiv:1512.07679.
Ghanem, M. C. and Chen, T. M. (2020). Reinforcement
learning for efficient network penetration testing. In-
formation, 11(1):6.
Hasselt, H. V. (2010). Double q-learning. In Advances in
neural information processing systems, pages 2613–
2621.
Hoang, V. N., Hai, N. N., and Tetsutaro, U. (in press). Mul-
tiple level action embedding for penetration testing. In
Proceedings of the International Conference on Fu-
ture Networks and Distributed Systems.
Kaelbling, L. P., Littman, M. L., and Moore, A. W. (1996).
Reinforcement learning: A survey. Journal of artifi-
cial intelligence research, 4:237–285.
Mnih, V., Badia, A. P., Mirza, M., Graves, A., Lillicrap, T.,
Harley, T., Silver, D., and Kavukcuoglu, K. (2016).
Asynchronous methods for deep reinforcement learn-
ing. In International conference on machine learning,
pages 1928–1937.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M.
(2013). Playing atari with deep reinforcement learn-
ing. arXiv preprint arXiv:1312.5602.
Phillips, C. and Swiler, L. P. (1998). A graph-based system
for network-vulnerability analysis. In Proceedings of
the 1998 workshop on New security paradigms, pages
71–79.
Sarraute, C., Buffet, O., and Hoffmann, J. (2013). Pomdps
make better hackers: Accounting for uncertainty in
penetration testing. arXiv preprint arXiv:1307.8182.
Schwartz, J. and Kurniawati, H. (2019). Autonomous pen-
etration testing using reinforcement learning. arXiv
preprint arXiv:1905.05965.
Wang, Z., Schaul, T., Hessel, M., Hasselt, H., Lanctot, M.,
and Freitas, N. (2016). Dueling network architectures
for deep reinforcement learning. In International con-
ference on machine learning, pages 1995–2003.
The Proposal of Double Agent Architecture using Actor-critic Algorithm for Penetration Testing
449
