
Building Synthetic Simulated Environments for Configuring and
Training Multi-camera Systems for Surveillance Applications
Nerea Aranjuelo
1,2
, Jorge Garc
´
ıa
1
, Luis Unzueta
1
, Sara Garc
´
ıa
1
, Unai Elordi
1,2
and Oihana Otaegui
1
1
Vicomtech, Basque Research and Technology Alliance (BRTA), San Sebastian, Spain
2
Basque Country University (UPV/EHU), San Sebastian, Spain
Keywords:
Simulated Environments, Synthetic Data, Deep Neural Networks, Object Detection, Video Surveillance.
Abstract:
Synthetic simulated environments are gaining popularity in the Deep Learning Era, as they can alleviate the
effort and cost of two critical tasks to build multi-camera systems for surveillance applications: setting up
the camera system to cover the use cases and generating the labeled dataset to train the required Deep Neural
Networks (DNNs). However, there are no simulated environments ready to solve them for all kind of scenarios
and use cases. Typically, ‘ad hoc’ environments are built, which cannot be easily applied to other contexts.
In this work we present a methodology to build synthetic simulated environments with sufficient generality to
be usable in different contexts, with little effort. Our methodology tackles the challenges of the appropriate
parameterization of scene configurations, the strategies to generate randomly a wide and balanced range of
situations of interest for training DNNs with synthetic data, and the quick image capturing from virtual cameras
considering the rendering bottlenecks. We show a practical implementation example for the detection of
incorrectly placed luggage in aircraft cabins, including the qualitative and quantitative analysis of the data
generation process and its influence in a DNN training, and the required modifications to adapt it to other
surveillance contexts.
1 INTRODUCTION
In recent years, the irruption of Deep Neural Net-
works (DNNs) has generated significant gains in a va-
riety of Computer Vision tasks, such as object detec-
tion (Hou et al., 2019), object segmentation (Mani-
nis et al., 2019), image captioning and visual rela-
tionship detection (Xi et al., 2020) or action recogni-
tion (Zhang et al., 2019) to build more sophisticated
vision-based systems. DNNs have demonstrated the
achievement of excellent results using large-scale su-
pervised learning approaches in which a large amount
of labeled data sets are usually required for training.
Typically, the more data we have available, the better
is their performance. In this context, collecting such
amount of data can be challenging specifically for two
principal reasons.
First, the compliance with privacy-related reg-
ulations in some countries, such as the ’General
Data Protection Regulation’ (GDPR) of the European
Union. The data collection process should put in
place appropriate technical and organizational mea-
sures to implement the data protection principles,
such as data protection or data anonymization.
Second, the time and cost that we need to devote
in the data collection process, considering that not
only the quantity is important but also the variety and
balance to appropriately cover all possibilities during
training. In the vast majority of cases, the data cannot
be directly extracted from the Internet since we try to
solve a particular problem in a specific scenario with
a specific camera setup. Thus, custom data sets need
to be created. This implies the execution of several
actions such as data set specification, camera setup in-
stallation, technical preparation, recording protocols,
even actors simulating precise guide notes. All these
actions together with the well-known problem of la-
beling data (Mujika et al., 2019) due to the lack of
effective tools and/or the annotation complexity make
the data set generation process more challenging.
There are several ways to extend training data:
(i) augmentation techniques (Shorten and Khoshgof-
taar, 2019), (ii) domain adaptation techniques and
(Singh et al., 2020) (iii) synthetic data generation
(Nikolenko, 2019). Augmentation techniques or do-
main adaptation approaches can be used for those
cases in which we already have some annotated data
corresponding to the domain. In case we do not,
80
Aranjuelo, N., García, J., Unzueta, L., García, S., Elordi, U. and Otaegui, O.
Building Synthetic Simulated Environments for Configuring and Training Multi-camera Systems for Surveillance Applications.
DOI: 10.5220/0010232400800091
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
80-91
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

before we start collecting real data, we could tackle
the initial stages of the system’s design by generat-
ing some synthetic data. This would allow us to train
initial versions of DNNs that could help us annotat-
ing real data, start applying the other mentioned tech-
niques, and progressively improve the system’s relia-
bility (Seib et al., 2020).
As stated in (Nikolenko, 2019), synthetic data can
be generated following different kinds of strategies,
such as compositing real data, relying on generative
models, or using simulated environments. The lat-
ter has an additional advantage when building multi-
camera systems for surveillance applications: they
typically provide virtual cameras that can help setting
up the camera system to cover the use cases in the
targeted real scenario. This is particularly relevant in
scenarios not easily accessible for system designers
and/or when the camera positions and lens character-
istics are not predefined. However, there are no gen-
eral simulated environments ready to solve the cam-
era setup and data generation tasks for all kinds of
scenarios and use cases. Typically, ’ad hoc’ environ-
ments are built. On the contrary, a generalist solution
should allow:
• Including the required scenario-related graphical
assets in an easy manner.
• Configuring context- and use-case-based scenes
with user-friendly parameters.
• Capturing images from virtual camera viewpoints
quickly, taking into account that the rendering
time could be an important bottleneck in this pro-
cess. These images should include camera-related
effects, such as the geometric distortion intro-
duced by the lenses.
• Generating a wide and balanced range of plausi-
ble situations of interest, randomly, applying suit-
able noise to the labeled data for the appropriate
training of DNNs.
In order to respond to all these challenges, in this
work we present a methodology to build synthetic
simulated environments for configuring and training
multi-camera systems with sufficient generality to be
usable in different surveillance contexts, with little ef-
fort. We focus on static systems, i.e., those in which
the cameras are visualizing the scene from specific
positions. This means that applications involving dy-
namic systems (e.g., robots that interact with the en-
vironment while patrolling areas of interest), are be-
yond this scope. We show a practical implementation
example of this methodology in the context of digital-
ized on-demand aircraft cabin readiness verification
with a camera-based smart sensing system. We also
compare it to alternative state-of-the-art approaches,
including the qualitative and quantitative analysis of
the data generation process, and the required modi-
fications to adapt it to another surveillance context.
To ensure the suitability of the generated data by our
methodology, we train a classification DNN and eval-
uate its accuracy when trained with real and synthetic
images.
The rest of the paper is organized as follows: sec-
tion 2 describes prior works related to synthetic sim-
ulated environments for training intelligent systems;
section 3 explains our proposed methodology; section
4 presents the mentioned practical implementation
example and experiments; finally, section 5 presents
the conclusions and future lines of work.
2 RELATED WORK
The recent survey on synthetic data for deep learning
(Nikolenko, 2019) shows that in the last years there
has been a shift from static synthetic datasets to inter-
active simulation environments, grouped in the fol-
lowing categories: (1) outdoor urban environments
for learning to drive, (2) indoor environments and
(3) robotic and aerial navigation simulators. Current
state-of-the-art environments have been built upon
Grand Theft Auto V (GTA V) (Hurl et al., 2019),
Unity3D (Saleh et al., 2018; Scheck et al., 2020),
Unreal Engine (Lai et al., 2018; Shah et al., 2017),
CityEngine (Khan et al., 2019) or Blender (Rajpura
et al., 2017), among others.
GTA V is an action-adventure video game with re-
alistic graphics of a large detailed city and surround-
ing areas from which diverse data can be extracted,
involving virtual people, animals, cars, trucks, motor-
bikes, planes, etc. As stated in (Saleh et al., 2018), the
main drawback of video-game-based environments
is the limited freedom for customization and control
over the scenes to be captured, which makes obtaining
a large diversity and good balance of classes difficult,
due to the rather complicated procedure required to
obtain ground-truth instance-level annotations.
On the contrary, (Saleh et al., 2018) claims
that their environment, built upon the game engine
Unity3D, can be set up by one person in one day.
This is very little effort, considering that it allows hav-
ing access to a virtually unlimited number of anno-
tated images with the object classes of state-of-the-art
real urban scene datasets. It captures synthetic im-
ages and instance-level semantic segmentation maps
at the same time and in real-time, with no human in-
tervention. While generating the data it renders the
original textures and shaders of included 3D objects
and other automatically created unique ones for their
Building Synthetic Simulated Environments for Configuring and Training Multi-camera Systems for Surveillance Applications
81
Environment Objects
Scene
Description
File
Loader
Camera
Parameters
Rendering
Parameters
Object
Parameters
Importer
Object
Relations
Engine
Scene
Manager
Scene
Configuration
Label
Generator
Images
Labels
Lighting
Parameters
Training Data
Segmented
Images
User
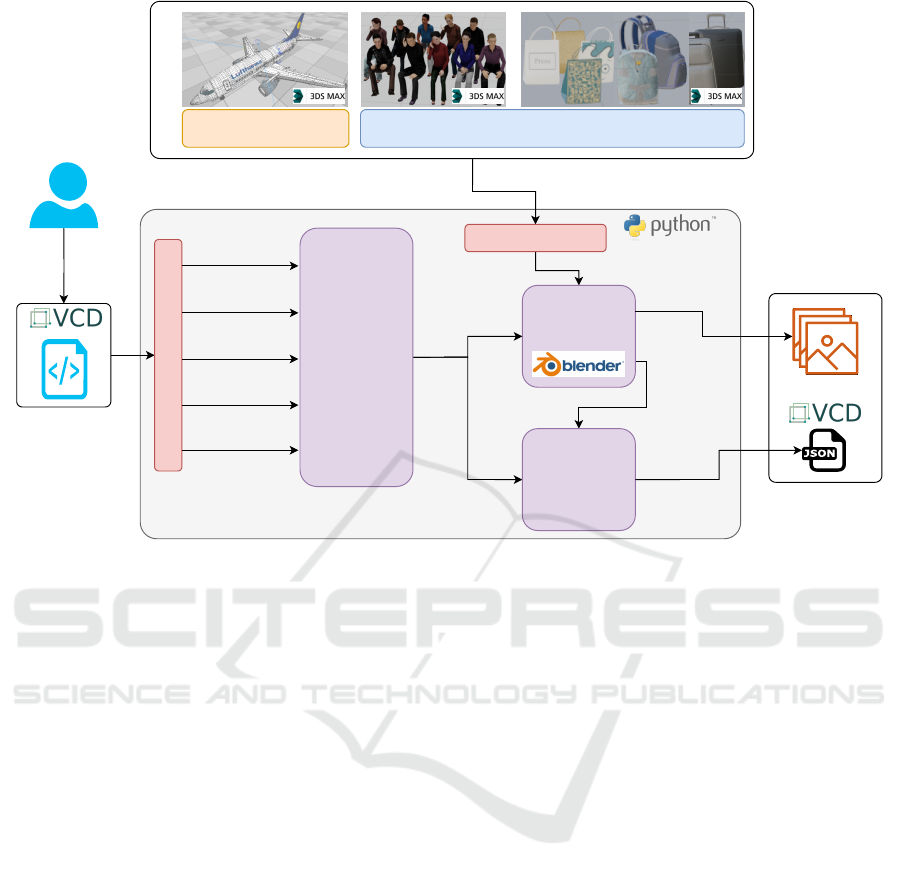
Figure 1: Software architecture of the proposed methodology for creating synthetic training data for vision-based systems.
corresponding instances. Unity3D is also the basis of
the indoor environment proposed by (Scheck et al.,
2020) for the generation of synthetic data for object
detection from an omnidirectional camera placed on
the ceiling of a room. The 3D assets are generated us-
ing the skinned multi-person linear model proposed
in (Loper et al., 2015). This work points out that
Unity3D only provides a camera model for perspec-
tive and orthographic projection. They overcome this
limitation by combining four perspective cameras fol-
lowing the procedure proposed in (Bourke and Fe-
linto, 2010).
(Lai et al., 2018) proposed a universal dataset and
simulator of outdoor scenes such as pedestrian de-
tection, patrolling drones, forest fires, shooting, and
more. It is powered by the Unreal Engine and lever-
ages the AirSim (Shah et al., 2017) plugin for hard-
ware simulation. The TCP/IP protocol is used to com-
municate with external deep learning libraries. As
it is focused on training dynamic systems relying on
deep reinforcement learning (Hernandez-Leal et al.,
2019), it prioritizes the real-time interactivity of the
virtual agents over photorealistic rendering. This dif-
fers from static systems for surveillance applications,
like those that motivate this work, in which at least for
the data generation process, achieving a better render-
ing quality is more important than the real-time inter-
activity during training.
CityEngine is a program that allows generating
3D city-scale maps procedurally from a set of gram-
mar rules. It is used in (Khan et al., 2019) as part
of their method to generate an arbitrarily large, se-
mantic segmentation dataset reflecting real-world fea-
tures, including varying depth, occlusion, rain, cloud,
and puddle levels while minimizing required effort.
Blender is an open-source 3D graphics software
with Python APIs that facilitate loading 3D models
and automating the scene rendering. It was used in
(Rajpura et al., 2017) to generate a dataset to train a
DNN-based detector for recognizing objects inside a
refrigerator. It used Cycles Render Engine available
with Blender. This engine is a physically-based path
tracer that allows getting photorealistic results, which
is beneficial for avoiding a big domain gap between
the feature distribution of synthetic and real data do-
mains.
3 PROPOSED METHODOLOGY
Figure 1 shows the architecture of the proposed
methodology for generating synthetic data for train-
ing deep learning models. The input data of our ap-
proach are the 3D assets of the scene and the scene’s
description file. The output are the synthetic images
and the annotations for training DNNs. The principal
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
82

modules in our approach are: (i) the scene manager
which is responsible to load the scene configuration;
(ii) the engine which sets up the 3D scene according
to the provided configuration and generates the train-
ing images by rendering different camera viewpoints
and; (iii) the label generator which generates an out-
put file containing the annotations corresponding to
the generated images.
Similar to the data collecting process carried out
in a real environment, the first step is gathering all
the necessary 3D graphical assets to reproduce the
scene of interest. Specifically, two different groups
of graphical assets are required. The first type con-
tains those graphical assets representing the environ-
ment (i.e., the scenario in which we should accom-
plish the recordings). We assume that such assets be-
longing to the environment are static since they rep-
resent the background. The second group contains
those graphical assets representing the dynamic ob-
jects of the scene. The combination of the locations
of these assets, their poses, sizes, and appearances to-
gether with the variations of the lighting sources and
the camera properties will provide a wide range of va-
riety for generating our custom training data.
For use cases in which some graphical assets are
unavailable, the user should create them using 3D
modelling software applications. We use 3DS Max
but it is possible to use other applications such as Au-
todesk Maya, Lightwave-3D, Vectary, Blender, etc.
Depending on the complexity, additional plugins such
as Populate (for 3DS Max) can alleviate the effort
of designing the objects. Working with a very de-
tailed 3D model can become a challenge due to the
vast amount of polygons and materials that the render
engine has to process. This is directly related to the
rendering time of the scene and it could be a trouble-
some bottleneck in the data flow when a user tries to
generate thousands of samples. However, using very
detailed 3D assets or more lightweight ones should be
considered based on the scope of the use case.
Once all the assets of the scene are designed, our
method allows us to configure different camera se-
tups, placing objects at multiple locations and poses,
having multiple illumination sources, or configuring
the rendering parameters by a minimum user interac-
tion. Furthermore, the user can easily define multiple
combinations of parameters for generating different
training data samples in a single iteration.
Specifically, the user has to define a configuration
file in which the parameterization of the scene is spec-
ified in a user-friendly way. Then, a loader interprets
the content related to the different entities according
to the nature of the parameters (objects, cameras, il-
lumination, rendering). Such information is received
by the scene manager, which interprets and handles
these data to build the scene configuration for the
user-defined sequence. This configuration is used to
replicate the target scenes in the 3D synthetic environ-
ment, which implies loading the environment and dy-
namic assets with the corresponding configurations,
as well as setting all the cameras, lighting, and ren-
dering parameters to get the desired results. Then,
the engine renders the images from the defined cam-
era perspectives. We use Blender for this purpose, al-
though the same methodology could be applied using
alternative similar programs.
The label generator is in charge of generating the
corresponding annotations based on generated seg-
mented images. The user can choose different anno-
tation types depending on the target computer vision
task (e.g., object detection or semantic segmentation).
3.1 Scene Management
The synthetic scene is replicated based on the infor-
mation provided by the user. The user is in charge
of the configuration through the description file. For
this purpose we adopt the Video Content Descrip-
tion (VCD) structured JSON-schema file format (Vi-
comtech, 2020). VCD is an open source metadata
structure able to describe complex scenes, including
annotations and all the needed scene information in a
very flexible way. In addition, it allows a very easy
and fast user interaction for the files generation pro-
cess. The VCD format is compatible with the Open-
LABEL standard (ASAM, 2020). The configuration
file contains the information related to the cameras
and lighting setup, the 3D assets in the scene and the
relation between them, and the rendering parameters.
Modifying something in the scene, such as the posi-
tion of an object or the camera specifications, is sim-
ply done by changing the corresponding field in the
configuration file.
3.2 Camera Setup and Lighting Sources
The camera setup controls the way the scenario and
the objects are represented in the 2D images. In order
to obtain realistic training data, the virtual cameras
should simulate the same properties of the sensor and
the lens that the expected cameras, which will be in-
stalled in the real environment. One of the major ben-
efits of using Blender as an engine for creating and
rendering the scene, in contrast with others such as
Unity3D, is the multiple choices of camera models.
In particular, we can generate the image projection of
the virtual camera by using an orthographic model,
a perspective model, or a panoramic model. These
Building Synthetic Simulated Environments for Configuring and Training Multi-camera Systems for Surveillance Applications
83
three models allow emulating any combination of the
image sensor and lens type mounted in a real camera.
Table 1 shows the parameters that need to be added
to the configuration file to add as many cameras as
desired with their corresponding parameters.
Table 1: Camera Parameters.
Camera model
Camera model (different distortion
types).
Resolution Output image resolution (pixels).
Position
Sensor position (m) in X, Y and Z
axis.
Orientation
Sensor orientation (degrees) in X,
Y, and Z axis.
Size Sensor size (mm).
FOV FOV of the sensor (degrees).
Focal length Focal length of the sensor (mm).
Custom params Extra params defined by the user.
Another important factor affecting the projection
of the visual information from 3D to 2D is the light-
ing of the scene. Depending on the target scenario, the
user may want to add light coming from single points
which emit light in all directions or from spots with
a single direction (e.g., indoor lamps) or an outdoor
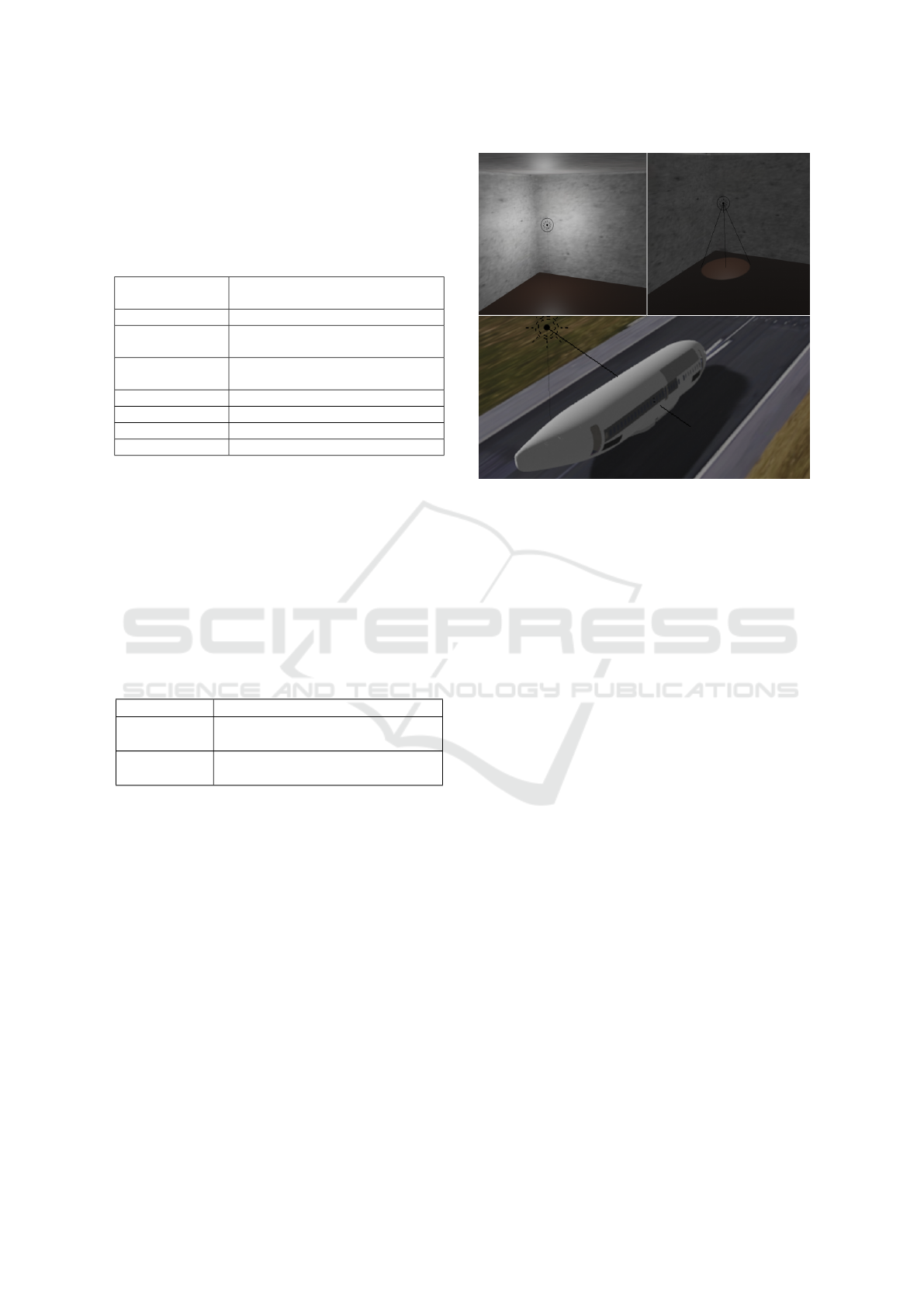
lighting simulating the sun. Figure 2 shows some ex-
ample of the mentioned lighting types. Table 2 shows
the parameters that should be defined in the config-
uration file to add as many different light sources as
desired to the 3D environment.
Table 2: Lighting Parameters.
Light model Type (point, spot, sun).
Position
Light position (m) in X, Y and Z
axis.
Orientation
Light orientation (degrees) in X, Y
and Z axis.
The scene configuration is automatically repli-
cated in the 3D environment from the description file.
During this step, the scene configuration is exported
as a Blender project for those cases in which the user
wants to interactively explore the camera setup. This
way, it can be used as an interactive tool that helps to
design a proper setup for a target application. Parame-
ters such as the intrinsic and extrinsic camera param-
eters, their positions, or even the number of needed
cameras can be modified by the user while he/she vi-
sualizes the images that would be captured. Simulat-
ing a specific set up with no need of physically de-
ploying it, can be of great help to avoid wrong deci-
sions that lead to a not optimal or wrong set up.
This way it may help to define the appropriate
number of cameras, their locations, poses, and view-
points. Thus, the proposed methodology includes the
following two bidirectional features:
Figure 2: Light sources for a 3D environment: lamp emit-
ting light in all directions (top left) and a single direction
(top right), and lighting simulating the sun (bottom).
• VCD2Scene: The user defines the VCD descrip-
tion file and the scene is replicated in the 3D envi-
ronment including the 3D assets, camera configu-
rations, and lighting sources.
• Scene2VCD: The user loads a 3D scene and after
making the desired modifications, he/she exports
the new setup to a VCD description file.
3.3 3D Assets in the Scene
Regarding the 3D assets’ configuration in the scene,
it is also defined in the VCD file. The user can add
as many objects as desired to the scene in specific
configurations. These objects should belong to the
available 3D asset types (e.g., humans, cars). Then
the 3D environment simulator interprets this informa-
tion through the local relation between the assets. The
user should have previously defined the relations that
will be present in the scene and interactively select the
positions they would belong to. For example, if the
target application is about detecting abandoned ob-
jects in an airport, some local relations that would be
necessary could be ”on” or ”below”. These relations
would let the user relate different assets for example
by describing that certain objects (e.g., a bag, a suit-
case) are on a desk or below the waiting seats. At the
same time, the environment simulator would relate
these positions with the user-selected positions. In
addition, the user defines in the VCD file the time in-
terval when each specific asset is present in the scene
in the described configuration. This method provides
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
84
high flexibility for the user to generate a high variety
of configurations in a very fast and user-friendly way.
In order to add a higher degree of variety to the
generated data, when each asset is placed on a spe-
cific position some random noise is added to slightly
perturb its position and orientation. In addition, the
user can choose to apply random colors to the 3D as-
sets for including more diversity in the data or on the
contrary maintain the original textures.
3.4 Rendering Parameters
The rendering step turns the 3D scene into the out-
put 2D image. The configuration of the rendering af-
fects both the image quality and rendering time. The
optimum configuration is closely related to the target
task requirements and the available hardware. There-
fore, our approach lets the user change the most in-
fluential parameters in the configuration file. The pa-
rameters that can be modified are shown in Table 3.
The user can choose between the available rendering
engines (in the case of Blender there are three avail-
able engines), computing caustics or not, the render-
ing tile size, the device to be used (CPU or GPU), and
the maximum allowed light bounces. When the light
hits a surface, it bounces off the surface and hits an-
other one, and then the process is repeated. This is
very expensive in terms of rendering time. Decreas-
ing the maximum bounces implies limiting the num-
ber of times a ray can bounce before it is killed and
therefore, decreasing the time spent computing rays.
Depending on the scene and the task, the user can ad-
just this parameter for getting the desired output.
Table 3: Rendering Parameters.
Device Device used for rendering (CPU/GPU).
Engine Engine type used for rendering.
Tile
Area of the image considered during
the rendering.
Bounces Maximum light bounces to be applied.
Caustics Caustics computation.
3.5 Labeled Data Generation
Training machine learning models in a supervised
way implies not only collecting the needed data but
also the corresponding annotations. Annotating the
data is an expensive process for which synthetic data
generation can be very helpful thanks to the automatic
labels generation. Our approach provides flexible an-
notations, with different levels of detail depending on
the target computer vision task (object detection, ob-
ject segmentation, or visual relationship detection).
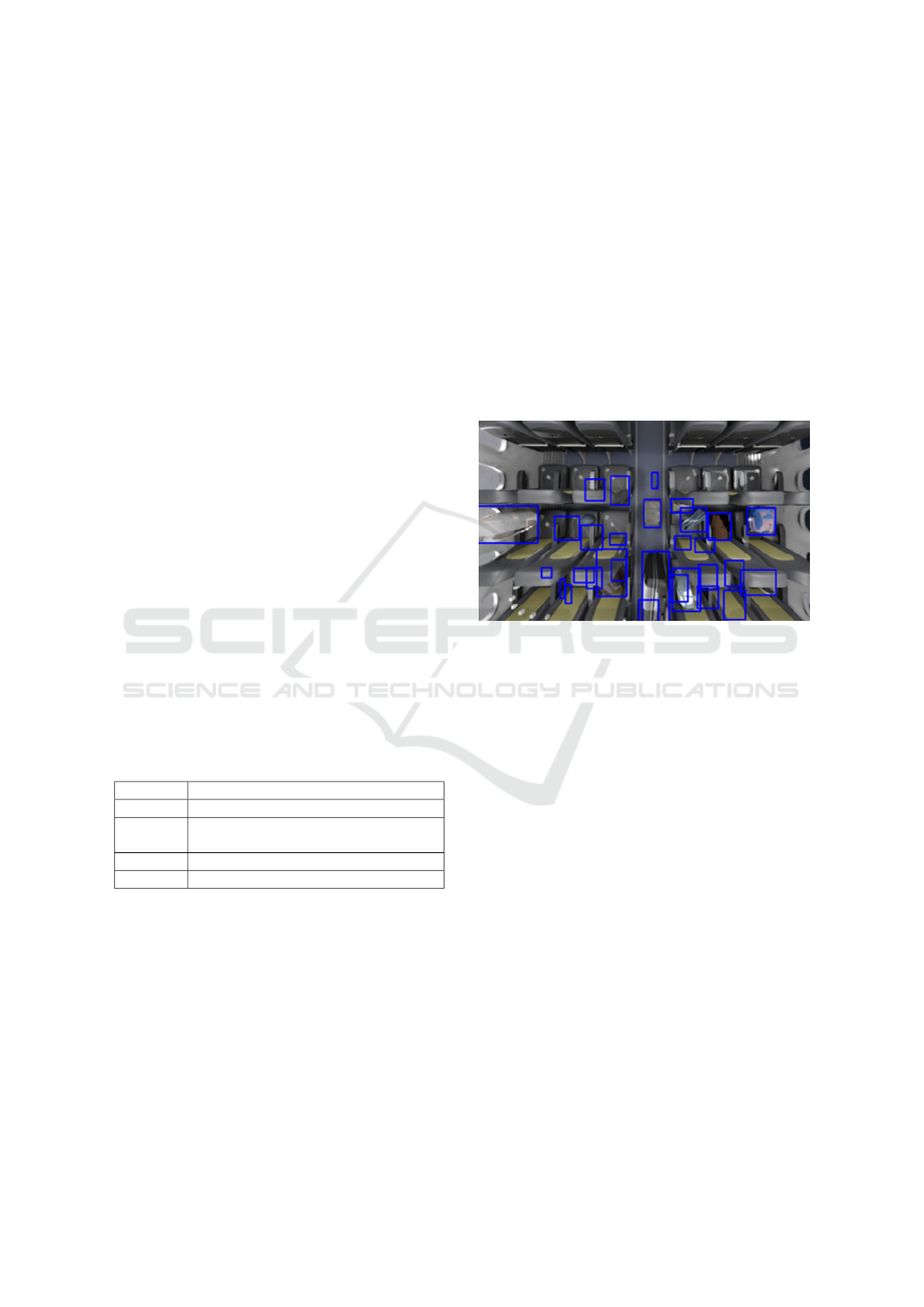
Getting the 3D assets’ world coordinates and pro-
jecting them to the image plane would be a very ef-
ficient way to automatically obtain the annotations.
However, it can be observed in Figure 3 (correspond-
ing to a scene in the context explained in the follow-
ing section) that this could lead to wrong annotations
because of occlusions. Different elements of the envi-
ronment can occlude some objects, so if these occlu-
sions are not considered we would obtain annotations
for objects that are not visible in the rendered images.
An additional challenge is the camera distortion. Get-
ting accurate annotations implies taking into account
and replicating the distortion algorithm used by the
chosen 3D graphics software’s camera model to ob-
tain the final objects’ positions.
Figure 3: Object annotations based on 3D coordinates can
result in some annotated objects occluded by the seats.
We opt for rendering accurate instance-level
masks. Each asset in the simulated scene is given a
unique ID apart from the object class ID it belongs to.
These instance IDs are used to compute an alpha mask
per object. These masks are combined in a single seg-
mentation mask. When the data generation starts, the
synthetic images are rendered at the same time as the
instance-level semantic segmentation maps.
The segmentation masks are used to generate the
annotations, which are stored in the output VCD file.
This file contains both the input configuration data
and the annotations. By default, the masks are used
to get the minimum bounding boxes containing each
objects’ pixels, which are represented in the VCD
file by each boxes’ corner coordinates. These anno-
tations can be used to train object detectors. How-
ever, our approach can be configured to save the ob-
jects’ segmentation mask too. These data are already
in the instance-level masks and are stored as object
contours, which are described as polygons in the out-
put file. In addition, the output VCD file contains the
description of the relations between the assets in the
scene. These data are complemented with the objects’
bounding boxes. These annotations can be used to
train visual relationship detectors. The annotations
Building Synthetic Simulated Environments for Configuring and Training Multi-camera Systems for Surveillance Applications
85

need to be parsed to the required format depending
on the chosen deep learning framework (e.g., Tensor-
Flow, PyTorch).
The annotations in the output VCD file are stored
per object and framewise. Consequently, each annota-
tion is stored along with its corresponding image path.
4 PRACTICAL CASE AND
EXPERIMENTS
In order to validate the proposed methodology, we ap-
ply it to a real problem, in the context of digitalized
on-demand aircraft cabin readiness verification with
a camera-based smart sensing system. Currently, the
verification of Taxi, Take-off, and Landing (TTL) re-
quirements in aircraft cabins is a manual process. The
cabin crew members need to check that all the luggage
is correctly placed in each TTL phase. During these
phases, the luggage should not be situated in such
a way that an emergency evacuation of the aircraft
would be delayed or hindered. Figure 4 shows the
allowed and not allowed positions for the cabin lug-
gage during TTL. The verification done by the crew
members could be automated with the development
of a vision-based system. This system would be ben-
eficial in terms of operational efficiency and safety.
Developing a system capable of detecting the luggage
positions in the cabin entails two main challenges:
the design of the camera set up and the generation of
suitable data for training the corresponding machine
learning models. As stated previously, a 3D environ-
ment simulator can be very helpful for these tasks.
Figure 4: Authorised positions for luggage during TTL.
4.1 3D Assets for the Use Case
To address this problem, the first step of our method-
ology is the generation of the assets. We first generate
all the involved 3D assets for the scene of interest. In
this case, we model 22 different object types to sim-
ulate typical cabin luggage (e.g., backpacks, maga-
zines, laptops), a cabin model representing a Boeing
737 aircraft (with 19 seats), and a group of human
models with different poses and appearances for the
seated passengers. The generated 3D assets are shown
in Figure 5.
Figure 5: Generated 3D assets for the use case: cabin lug-
gage, passengers, and aircraft cabin.
4.2 Cabin Camera Setup Design
For the camera setup task, our feature VCD2Scene
allows loading the aircraft model within some of the
modeled 3D assets using an initial configuration file
and visualizing directly the 3D scene from the virtual
camera viewpoints. The initial setup idea could be to
place some cameras on top of the seats to control the
luggage in these areas (e.g., backpacks partially below
the seats) and some other cameras above the corridor
to verify a clear exit. However, how many cameras
should be installed? Where should they be to guaran-
tee the system can see every seat without occlusions?
What lens parameters should these cameras have?
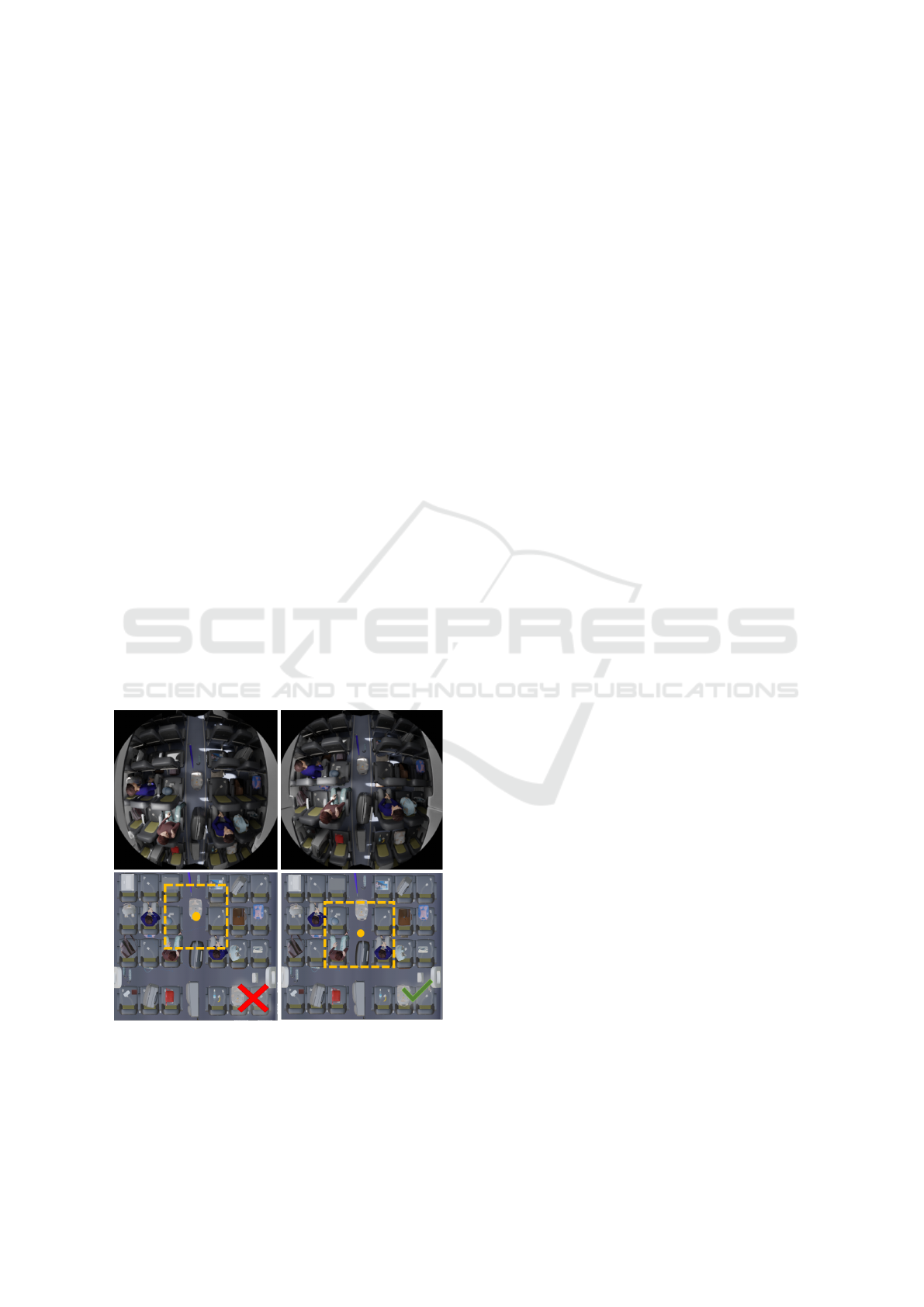
Figure 6: Captured scene from different camera positions.
The configuration shown in the left images is discarded be-
cause of the occlusions in the front middle seat.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
86
To answer these questions we interactively change
the virtual cameras’ extrinsic and intrinsic parameters
to check the results we would obtain with each con-
figuration. We move the camera positions and orien-
tations to guarantee that all the regions of interest are
captured by the minimum number of cameras.
Figure 6 shows an example of accepted and dis-
carded camera positions for capturing the luggage in
the seat areas. At first, we could think the cameras
should be on top of the middle seats to capture the
status of 6 individual seats (left images). As it can
be observed, the passenger seated in the front middle
generates an occlusion that does not allow visualiz-
ing if he/she has some luggage incorrectly placed. To
avoid this blind spot, we test moving the camera to-
wards the windows to capture 4 individual seats (right
images). We can see that from this viewpoint there are
no occlusion problems, so we opt for this configura-
tion. Then, we test setting some cameras in the corri-
dors to verify that area and the seats next to the cor-
ridor. Figure 7 shows the tested configurations. Even
the corridor space is well visualized in both shown
camera positions, the camera should be aligned with
the seats (right image) to guarantee the minimum pos-
sible occlusions in the feet are of the passengers for as
many seats as possible. These tests resulted in a setup
design of 20 perspective cameras on top of the seats
and 19 on top of the corridor. To guarantee a good vi-
sualization of the target areas, we set the parameters
of all the cameras to a FOV of 118 degrees, a focal
length of 2.13mm, and a sensor size of 4mm.
Figure 7: Captured scene from different camera positions.
The configuration shown in the left images is discarded be-
cause of more occlusions.
4.3 Configuration Files Generation
Once we have the final cameras’ configuration we
export it to an updated VCD configuration file with
the Scene2VCD functionality. The file should also
contain the 3D assets’ configuration so that our en-
vironment generator replicates the defined sequences.
The situations’ variety and the number of object in-
stances of each class can be easily controlled, but de-
pends on the configuration file we use. Generating
a balanced dataset is important to guarantee that the
trained model does not have a bias for the most com-
mon objects in the dataset. Consequently, we define
the following requirements for generating the VCD
files:
1. An object sample from each object category
should be placed at all the possible configurations
and places at least once.
2. All the object classes should be present in the
generated sequences’ frames the same number of
times.
3. Samples should show a wide variety of object ap-
pearances.
Following these criteria, we generate three VCD files.
The first file describes a sequence where each frame
contains an object type placed in a specific configu-
ration at all the cabin places (e.g., backpacks on all
the seats). The goal of this sequence is to generate
enough samples of each object type’s appearance in
simple configurations (with no interaction of other
object types). The second file combines randomly
all the objects in all the possible configurations the
same number of times. We define a sequence of 500
frames. Each of these frames contains different ob-
jects’ configurations. The last file follows the same
strategy of random combinations but it is focused on
the appearance variations. In addition to the default
random variations aggregated to the 3D assets posi-
tion, it enables the color randomization for objects
(Section 3.3). Consequently, this file extends the al-
ready defined object combinations with new ones that
contain objects with a high variety of random appear-
ances. Providing a 3D asset a random color can make
some objects look less realistic but increases the va-
riety of samples and can benefit the robustness of the
trained models. The strategy used for generating the
VCD files is not limited to the current use case, it can
be applied to other tasks and scenarios. The defined
sequences are summarized in the Table 4.
4.4 3D Scenes Generation
We use the VCD files to automatically replicate the
3D scenes described in them with no manual interven-
Building Synthetic Simulated Environments for Configuring and Training Multi-camera Systems for Surveillance Applications
87

Figure 8: Data generation pipeline example. The input VCD file describes the scene that is replicated by the synthetic
3D environment generator, including present objects and its relations. The tool outputs rendered images and corresponding
annotations in VCD format, which correspond to data from different camera perspectives.
Table 4: Summary of the generated data.
Sequence VCD 1 VCD 2 VCD 3 Total
Description
Single object
class/frame
Random,
balanced
Random
appearances
-
Number of
frames
45 500 500 1,045
Number of
rendered images
1,755 19,500 19,500 40,755
Number of 3D
object instances
5,966 33,000 33,000 71,966
tion. The 3D environment is configured with all the
data regarding the cameras, lighting, rendering, and
3D assets to replicate the defined scenes in the cabin.
The environment is dynamically configured when the
data generation starts.
4.5 Generated Data
Each frame in the sequences is captured from all the
defined cameras, so for each frame 39 images are ren-
dered from different camera viewpoints. An output
VCD file is generated for each sequence containing
the data already in the input file (e.g., camera con-
figurations, relations between objects) and the addi-
tion of the output data. The output data include the
paths to the generated images and the corresponding
bounding box annotations for each object or passen-
ger. Figure 8 shows the data generation process from
the input VCD file to the output synthetic data. The
left image shows an example of the objects and the
relations between them as it is defined in the VCD
file. The 3D environment simulator processes this in-
formation to configure the 3D scene. It can be seen
that the example data (’magazine-4 is on Passenger-
14’) is replicated in the synthetic 3D world). This
scene is captured from the defined cameras to pro-
duce the corresponding rendered images, along with
the annotations. In the output synthetic images it can
be observed that the same 3D assets can be observed
from different cameras at the same time. The right im-
ages of Figure 8 show an example of the additional in-
formation that the output VCD file contains (objects’
bounding box coordinates in each rendered frame).
This information completes can be used not only for
training object detectors but also for training visual
relationship detectors.
4.6 Analysis of the Proposed Approach
In this section, we provide a qualitative and quantita-
tive analysis of the proposed methodology’s charac-
teristics. Table 5 shows a qualitative comparison of
some state-of-the-art approaches to ours.
The environment and 3D assets involved in all the
data generation methods are manually modeled with
the help of a 3D modeling software or gathered from
public repositories. (Khan et al., 2019) also uses data
priors such as OpenStreetMap data to model differ-
ent city environments but still needs manual work to
complete and adjust the scene data.
Once the 3D environment is prepared, if the user
wants to change certain scene configurations with our
method, such as the light properties, the objects in the
scene or the relation between these objects, he/she can
define the modified scene in the configuration file us-
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
88
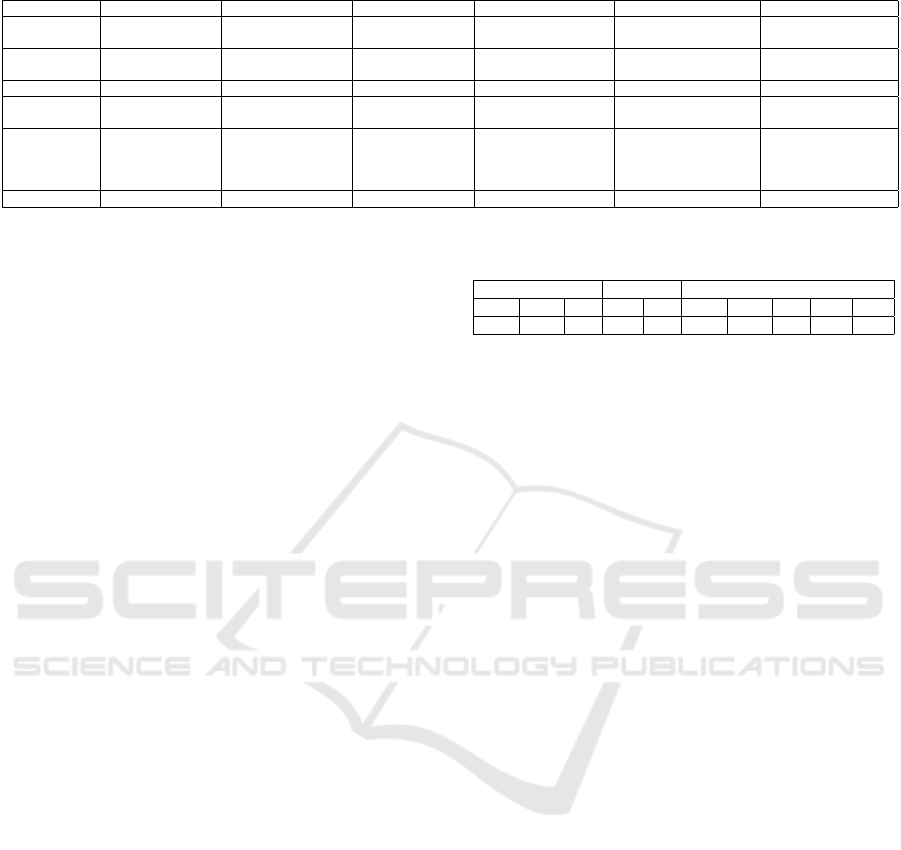
Table 5: Comparison between state-of-the-art synthetic dataset generation methodologies and our approach.
Feature (Lai et al., 2018) (Scheck et al., 2020) (Saleh et al., 2018) (Rajpura et al., 2017) (Khan et al., 2019) Our approach
Environment
modeling
Manual Manual Manual Manual Manual (data priors) Manual
Scene
modifications
Manual Manual Manual Manual Manual Automatic
Scene capture
Single-sensor Single-sensor Single-sensor Multisensor Single-sensor Multisensor
3D assets
relations
Users’ interactions None None None None
Spatial configuration
Annotations
Obj. detection,
sem. segmentation,
reinforcement
learning
Obj. detection,
sem. segmentation
Sem. segmentation Obj. detection
Sem. segmentation,
depth estimation
Obj. detection,
sem. segmentation,
visual relationship
detection
Generality Default scenarios
Limited
Driving scenarios Limited
Urban driving scenarios Surveillance scenarios
ing a user-friendly parameterization. Then the new
3D scenario will be automatically replicated. Our ap-
proach is the only one that proposes to dynamically
configure all the environment when the data genera-
tion process starts. Scene modifications can be done
in the different approaches but none of them provides
a high-level mechanism like ours to vary the environ-
ment. Related to the possible 3D assets relations, (Lai
et al., 2018) allows adding some limited user inter-
actions. Our approach allows adding spatial location
relations between the 3D assets.
Regarding the images capture, all the works pro-
pose a single source to capture the scene, except for
(Rajpura et al., 2017) and our approach, which allow
capturing the same time interval from cameras with
different viewpoints.
The data generated by the presented works are ori-
ented to the training of DNNs. Typical output in-
cludes annotations for object detection or semantic
segmentation tasks, to which (Lai et al., 2018) adds
reinforcement learning. Our approach also generates
labels suitable for training visual relationship detec-
tors.
One of the main advantages of our approach over
the others is its generality and the possibility to adapt
it with little effort to new scenarios and tasks in the
surveillance field. This feature is very limited to the
predefined scenarios in the state-of-the-art works.
Regarding the rendering time, it depends on differ-
ent factors such as the rendering engine, the complex-
ity of the scene, the number of 3D assets included,
the lights configuration, or the polygon number of the
modeled objects. For the current aircraft use case,
we configure the rendering to be as fast as possible
using the parameters in the configuration file main-
taining a good output quality. We use the real-time
viewport shading rendering for the camera set up de-
sign (Section 4.2) so that we can see the modifica-
tions’ effect interactively. For the data generation, we
use the Cycles Rendering Engine, which is slower but
provides more photorealistic results. Table 6 shows
the rendering time (s) computed in different tests to
choose the optimum parameters to render a 640x480
Table 6: Rendering time in seconds based on different con-
figuration parameters using an Nvidia Tesla T4 GPU.
Max Bounces Caustics Tile Size
12 6 1 Yes No 16 32 64 128 256
11.9 11.7 9.5 9.5 9.4 16.3 10.8 9.3 9.4 9.5
pixel image of the cabin environment including 50
3D assets (e.g., suitcases, passengers) apart from the
background ones, 16 point lights and outdoors sun-
light. We use an Nvidia Tesla T4 GPU. It can be
seen that reducing the maximum light bounces from
12 to 1 we need 2.4 seconds less, without noticeable
changes in the output image so we adopt only 1 light
bounce. Disabling caustics effects neither change the
scene appearance and we save an additional 0.1 sec-
ond. These times are based on using a tile size of
128, but the optimum tile size for our hardware set
up is 64. These parameter changes allow us to move
from a rendering time of 11.9 seconds to 9.3 seconds.
More than 2 seconds per sample in a process where
we need to generate thousands of images is a remark-
able time-saving. Regarding the rendering time of re-
lated state-of-the-art approaches, some works based
on game-engines claim to render in real-time (Scheck
et al., 2020; Khan et al., 2019). As stated in (Khan
et al., 2019), a simplified lighting model allows real-
time rendering of massive amounts of geometry with
a limited realism. The Cycles Rendering Engine, as a
physically-based path tracer, allows generating good
quality results in a reasonable time. Domain adapta-
tion techniques are important to solve the domain gap
that DNNs trained with synthetic data can present.
Generating data with a certain degree of realism min-
imizes the problem to be solved by those techniques.
However, Blender also has a real-time rendering en-
gine (Eevee) that can be used in tasks where the ren-
dering time is considered to be a bigger priority than
the data quality.
We apply our methodology to the aircraft use case,
but adapting it to another surveillance scenario re-
quires little effort from the user. Once the user col-
lects all the 3D assets of the new environment, the
flexibility of the method allows building a totally new
scene. The user interactively designs a suitable cam-
Building Synthetic Simulated Environments for Configuring and Training Multi-camera Systems for Surveillance Applications
89

era set up, along with the selection of target places.
Then he/she can start gathering variate training data
for the considered task based on the configuration
files.
4.6.1 DNN Training
In order to see how a DNN would perform with the
generated synthetic data and real data, we train the
model EfficientNet-B0 (Tan and Le, 2019) to clas-
sify whether an image contains a correct or incorrect
situation (e.g., cabin luggage correctly or incorrectly
placed). We define a region of interest (ROI) for each
seat, which will be then classified as correct or in-
correct. We replicate the cabin mock-up for capturing
also real images from the camera over the seats. Some
examples of both real and synthetic ROI images are
shown in Figure 9.
Figure 9: Real (top) and synthetic (bottom) ROI samples
for training a classification DNN with correct and incorrect
situations.
We do two tests to see the contribution of our syn-
thetic images in the DNN accuracy. First, we train
the DNN only with real data and test it on a separated
subset of real images. Then, we repeat the training
but incorporating the same number of samples from
our generated synthetic dataset and test it again on the
test real images. We capture and annotate 1,600 real
images.
We initialize the DNN with pretrained weights on
the ImageNet dataset (Deng et al., 2009) and fine-tune
it with our datasets. We train each DNN for 50 epochs
with a batch size of 40 and the RMSprop optimizer
(Bengio and CA, 2015). The model trained only with
real images achieves 88.52% accuracy when classify-
ing the real test samples, while the model which also
includes synthetic samples achieves 94.26% accuracy
on the same images. Consequently, the positive con-
tribution of the generated synthetic data in the model
accuracy confirms the suitability of the generated im-
ages for DNNs training.
5 CONCLUSIONS
This work presents a methodology to build simulated
3D environments for configuring and training multi-
camera systems with enough generality to be used in
different surveillance contexts, with little effort. Our
proposal helps in designing an appropriate camera
system to cover the target use cases and avoid ex-
pensive system setup errors. Once the camera setup
is done, our method allows generating a wide range
of situations of interest for training DNNs with suit-
able synthetic data. These situations should be bal-
anced for a successful DNN training. This is guar-
anteed by the input configuration files, which allow
controlling the content of the data with a user-friendly
fast scene parameterization. Certain randomness is al-
ways added to the scenes in terms of objects’ spatial
locations or appearances for greater data variability.
We show a practical implementation example of
our methodology in the context of digitalized on-
demand aircraft cabin readiness verification with a
camera-based smart sensing system. We design a 39
camera-based system and generate a training dataset
of 40,755 images containing a total number of 71,966
object instances in the cabin environment. We fol-
low a data balancing strategy to guarantee the suit-
ability of the generated data based on the configura-
tion files. We also compare our methodology to al-
ternative state-of-the-art approaches. Features such
as the generality, flexibility, and multi-camera setting
stand out from the features provided by the other ap-
proaches. We use a subset of the generated dataset
to train a classification DNN jointly with real images.
We show that incorporating our synthetic samples to
the training dataset boosts the accuracy of the model
when tested on real images. Consequently, the im-
ages generated by our methodology are suitable for
training DNNs.
Future work includes the extension of the method-
ology to support data generation for action recogni-
tion tasks, which requires the possibility of the as-
sets’ interaction beyond their configuration and rela-
tion. We also plan to continue our experiments about
training with the generated synthetic data to ensure
their suitability for different computer vision tasks as
we keep advancing. In addition, future research will
explore the emerging DNN techniques to generate 3D
models from 2D images, which may help and speed
up the manual process of gathering or designing the
3D assets required for any virtual environment.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
90

ACKNOWLEDGEMENTS
This work has received funding from the Clean Sky
2 Joint Undertaking under the European Union’s
Horizon 2020 research and innovation program
under grant agreement No. 865162, SmaCS
(https://www.smacs.eu/).
REFERENCES
ASAM (2020). OpenLABEL. https://www.asam.net/
project-detail/scenario-storage-and-labelling/.
Bengio, Y. and CA, M. (2015). Rmsprop and equilibrated
adaptive learning rates for nonconvex optimization.
corr abs/1502.04390.
Bourke, P. and Felinto, D. (2010). Blender and immer-
sive gaming in a hemispherical dome. In International
Conference on Computer Games, Multimedia and Al-
lied Technology, volume 1, pages 280–284.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE conference on com-
puter vision and pattern recognition, pages 248–255.
Ieee.
Hernandez-Leal, P., Kartal, B., and Taylor, M. (2019). A
survey and critique of multiagent deep reinforcement
learning. Autonomous Agents and Multi-Agent Sys-
tems, 33:750–797.
Hou, Q., Cheng, M., Hu, X., Borji, A., Tu, Z., and Torr,
P. H. S. (2019). Deeply supervised salient object
detection with short connections. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
41(4):815–828.
Hurl, B., Czarnecki, K., and Waslander, S. L. (2019).
Precise synthetic image and LiDAR (PreSIL) dataset
for autonomous vehicle perception. arXiv preprint
arXiv:1905.00160.
Khan, S., Phan, B., Salay, R., and Czarnecki, K. (2019).
ProcSy: Procedural synthetic dataset generation to-
wards influence factor studies of semantic segmenta-
tion networks. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR) Workshops, pages 88–96.
Lai, K.-T., Lin, C.-C., Kang, C.-Y., Liao, M.-E., and Chen,
M.-S. (2018). VIVID: Virtual environment for visual
deep learning. In Proceedings of the ACM Interna-
tional Conference on Multimedia (MM), pages 1356–
1359.
Loper, M., Mahmood, N., Romero, J., Pons-Moll, G., and
Black, M. J. (2015). SMPL: A skinned multi-person
linear model. ACM Transactions on Graphics (Pro-
ceedings of SIGGRAPH Asia), 34(6):248:1–248:16.
Maninis, K. K., Caelles, S., Chen, Y., Pont-Tuset, J., Leal-
Taix
´
e, L., Cremers, D., and Van Gool, L. (2019).
Video object segmentation without temporal informa-
tion. IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence, 41(6):1515–1530.
Mujika, A., Fanlo, A. D., Tamayo, I., Senderos, O., Baran-
diaran, J., Aranjuelo, N., Nieto, M., and Otaegui, O.
(2019). Web-based video-assisted point cloud anno-
tation for ADAS validation. In Proceedings of the In-
ternational Conference on 3D Web Technology, pages
1–9.
Nikolenko, S. I. (2019). Synthetic data for deep learning.
arXiv preprint arXiv:1909.11512.
Rajpura, P. S., Bojinov, H., and Hegde, R. S. (2017). Ob-
ject detection using deep CNNs trained on synthetic
images. arXiv preprint arXiv:1706.06782.
Saleh, F. S., Aliakbarian, M. S., Salzmann, M., Peters-
son, L., and Alvarez, J. M. (2018). Effective use of
synthetic data for urban scene semantic segmentation.
arXiv preprint arXiv:1807.06132.
Scheck, T., Seidel, R., and Hirtz, G. (2020). Learning from
theodore: A synthetic omnidirectional top-view in-
door dataset for deep transfer learning. In Proceed-
ings of the IEEE Winter Conference on Applications
of Computer Vision (WACV), pages 932–941.
Seib, V., Lange, B., and Wirtz, S. (2020). Mixing real
and synthetic data to enhance neural network train-
ing – a review of current approaches. arXiv preprint
arXiv:2007.08781.
Shah, S., Dey, D., Lovett, C., and Kapoor, A. (2017). Air-
Sim: High-fidelity visual and physical simulation for
autonomous vehicles. Field and Service Robotics,
pages 621–635.
Shorten, C. and Khoshgoftaar, T. (2019). A survey on image
data augmentation for deep learning. Journal of Big
Data, 6:1–48.
Singh, R., Vatsa, M., Patel, V. M., and Ratha, N., editors
(2020). Domain Adaptation for Visual Understanding.
Springer, Cham.
Tan, M. and Le, Q. V. (2019). Efficientnet: Rethink-
ing model scaling for convolutional neural networks.
arXiv preprint arXiv:1905.11946.
Vicomtech (2020). VCD - video content description. https:
//vcd.vicomtech.org/.
Xi, Y., Zhang, Y., Ding, S., and Wan, S. (2020). Visual ques-
tion answering model based on visual relationship de-
tection. Signal Processing: Image Communication,
80:115648.
Zhang, P., Lan, C., Xing, J., Zeng, W., Xue, J., and Zheng,
N. (2019). View adaptive neural networks for high
performance skeleton-based human action recogni-
tion. IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence, 41(8):1963–1978.
Building Synthetic Simulated Environments for Configuring and Training Multi-camera Systems for Surveillance Applications
91
