
A Snapshot-based Approach for Self-supervised Feature Learning and
Weakly-supervised Classification on Point Cloud Data
Xingye Li
1
and Zhigang Zhu
1,2 a
1
The City College of New York - CUNY, New York, U.S.A.
2
The Graduate Center - CUNY, New York, U.S.A.
Keywords:
Self-supervised Learning, Weakly-supervised Learning, 3D Point Cloud.
Abstract:
Manually annotating complex scene point cloud datasets is both costly and error-prone. To reduce the reliance
on labeled data, we propose a snapshot-based self-supervised method to enable direct feature learning on the
unlabeled point cloud of a complex 3D scene. A snapshot is defined as a collection of points sampled from the
point cloud scene. It could be a real view of a local 3D scan directly captured from the real scene, or a virtual
view of such from a large 3D point cloud dataset. First the snapshots go through a self-supervised pipeline in-
cluding both part contrasting and snapshot clustering for feature learning. Then a weakly-supervised approach
is implemented by training a standard SVM classifier on the learned features with a small fraction of labeled
data. We evaluate the weakly-supervised approach for point cloud classification by using varying numbers
of labeled data and study the minimal numbers of labeled data for a successful classification. Experiments
are conducted on three public point cloud datasets, and the results have shown that our method is capable of
learning effective features from the complex scene data without any labels.
1 INTRODUCTION
Deep neural networks such as PointNet (Qi et al.,
2017a), DGCNN (Wang et al., 2019) have been pro-
posed for better performances on point cloud related
tasks. Datasets on individual objects such as Mod-
elNet (Wu et al., 2015a), or on complex scene such
as the Oakland dataset (Munoz et al., 2009) have
been developed alongside the deep networks. The
collective effort between deep neural networks and
dedicated datasets continues to push up the state-of-
the-art performance on the point cloud understand-
ing tasks. To keep the deep networks from overfit-
ting, larger datasets are often involved in the model
training process. This requirement leads to the de-
velopment of larger and more sophisticated labeled
datasets. For example, the ModelNet datasets in-
creased from 4K object samples / 10 classes to 12K
samples / 40 classes (Wu et al., 2015a), the later
ShapeNet Core55 dataset has 51K object samples for
55 categories (Chang et al., 2015). However, anno-
tating large scale datasets comes to be very expensive
both in time and human labors. This issue is becom-
ing more prominent in applications such as hazard as-
a
https://orcid.org/0000-0002-9990-1137
sessment where drive-by and fly-by LiDAR mapping
systems have been used to collect massive windstorm
damage data sets in recent hurricane events (Bhargava
et al., 2019; Gong et al., 2012; Gong, 2013; Hu and
Gong, 2018), and LiDAR is starting to be integrated
into smaller mobile devices (Apple Inc., 2020), which
could lead to a boom in the scale of real life complex
point cloud data.
To alleviate the dependence on the labels of large
datasets, unsupervised learning methods have been
gaining momentum. The self-supervised approach
has found success in designing ”pretext” tasks, such
as jigsaw puzzle reassembly (Noroozi and Favaro,
2016), image clustering (Caron et al., 2018) and im-
age rotation prediction (Jing et al., 2018) etc, by
training deep learning models for feature extraction
without labels being involved. Based on the idea
of solving pretext tasks, Zhang and Zhu (Zhang and
Zhu, 2019) have recently developed the model of
Contrast-ClusterNet, which works on unlabeled point
cloud datasets by part contrasting and object cluster-
ing. While this work achieved comparable results
to its supervised counterparts, it inherits the problem
of other pretext-driven models on image data: In the
context of point cloud understanding, both part con-
trasting and object clustering assume the input data
Li, X. and Zhu, Z.
A Snapshot-based Approach for Self-supervised Feature Learning and Weakly-supervised Classification on Point Cloud Data.
DOI: 10.5220/0010230103990408
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
399-408
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
399
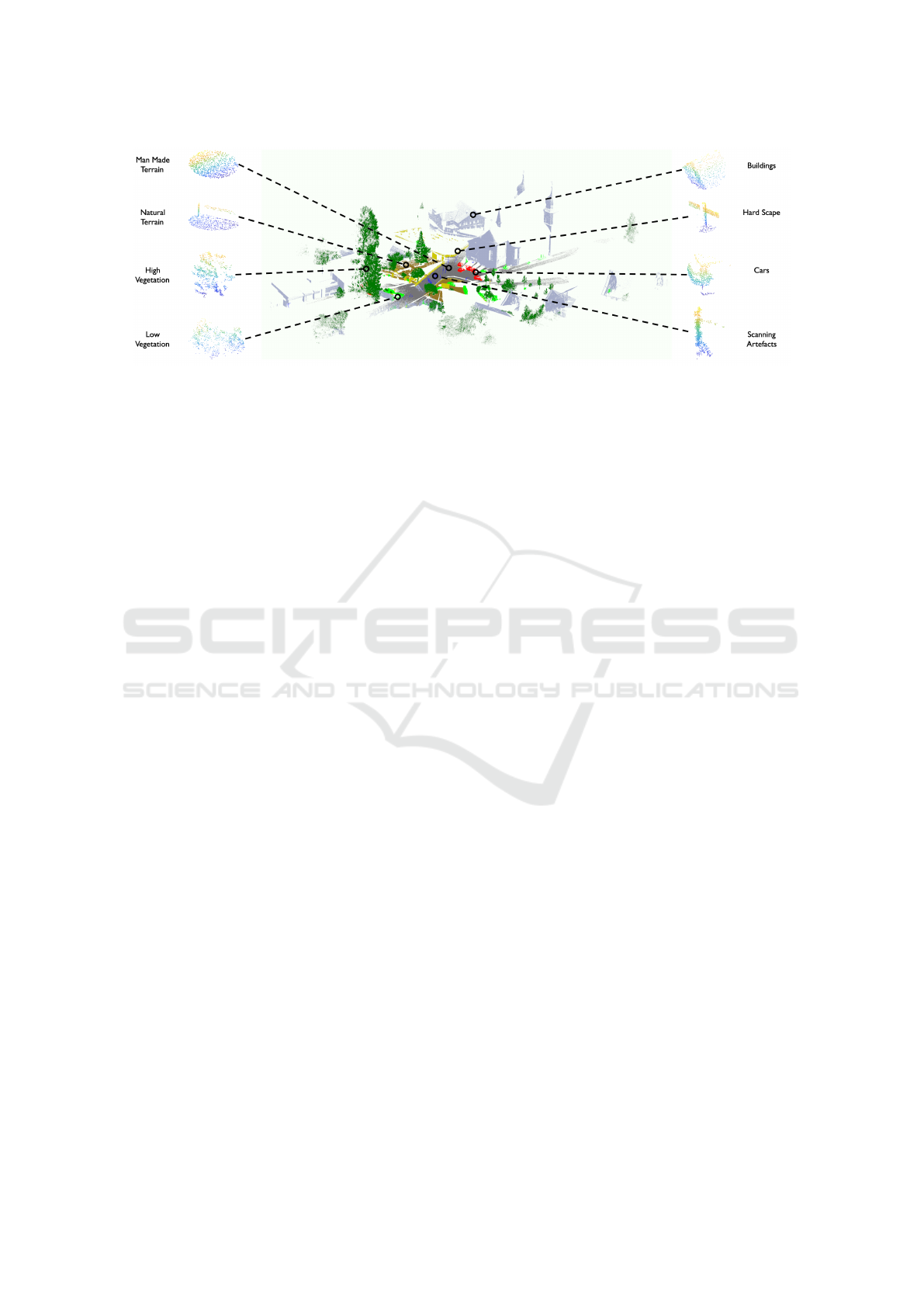
Figure 1: Visualizing snapshots sampled from the ‘Bildstein3 ’ scene of the Semantic3D dataset.
are well separated individual objects. This assump-
tion limits the model’s power on real life scene data
or where 3D data of single objects cannot be eas-
ily obtained. Furthermore, even though the Contrast-
ClusterNet approach is capable of extracting features
in a self-supervised manner, a classifier still needs to
be trained separately using labeled data for the clas-
sification task. Therefore an approach that uses min-
imal labeled data for 3D point cloud classification is
of great interest.
To address the aforementioned problems, we
propose a snapshot-based approach which uses the
Contrast-ClusterNet model as the backbone. Our
snapshot-based model for unsupervised feature learn-
ing works on both dedicated object classification
datasets and complex scenes without using labels or
even assuming points come from the the same objects.
A snapshot is defined as a collection of points, with-
out knowing their labels, sampled from a point cloud
scene (Figure 1). It could be a real view of a local
3D scan directly captured from the real scene, or a
”virtual” view of such a local 3D scan from a large
3D point cloud dataset. In our work, the captured
snapshots first go through the self-supervised pipeline
of a two step feature learning using ContrastNet and
ClusterNet consecutively. Then a weakly-supervised
approach is implemented by training an SVM clas-
sifier on the learned features with a small portion of
labeled data. We also evaluate the weakly-supervised
approach for point cloud classification by using var-
ious numbers of labeled data and study the minimal
numbers of labeled data for a successful classifica-
tion.
2 RELATED WORK
Deep Learning on Point Cloud. Inspired by the
success of deep learning on grid data, such as 2D
images made up of pixels, the 3D vision community
has been devoting efforts in adopting deep learning
to unorganized data such as 3D point cloud. Due to
its nature of being a collection of unordered points,
the traditional convolutional operations cannot be di-
rectly applied without being first transformed into
other grid representations. This observation encour-
aged a series of works on the development of both
voxel-based models (Maturana and Scherer, 2015;
Wu et al., 2015b; Hackel et al., 2017; Huang and You,
2016), which voxelize the unordered point cloud data
to 3D grids to enable 3D covolutional feature extrac-
tion, and the 2D multi-views models (Su et al., 2015;
Qi et al., 2016; Novotny et al., 2017; Kanezaki et al.,
2018), which take the projections of a 3D point cloud
to 2D views from multiple directions, so that tradi-
tional convolutional networks can be applied. How-
ever, both approaches have some limitations: The
voxel representations often have high demands on the
memory and computational power and the multi-view
methods often lead to the loss of geometrical infor-
mation during the dimension reduction, despite its ef-
ficiency.
PointNet (Qi et al., 2017a) is the first deep net-
work proposed to directly work with point cloud data
without transforming the raw point cloud into voxels
or 2D multi-views representations. This is achieved
by extracting local features of each point and combine
them as a global feature vector with a symmetric map-
ping function, such as max-pooling. However this
method suffers from its limited capability of process-
ing complex scene datasets due to its plain structure.
This problem is addressed in the work of PointNet++
(Qi et al., 2017b) by proposing a hierarchical network
based on the PointNet. Comparatively, PointNet++ is
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
400

capable of extracting more robust features from dif-
ferent scales.
In addition to the three approaches above, the
fourth one introduces the concept of graph to main-
tain the geometrical relations of the point cloud and
operate convolutions on such graphs. In general the
convolution operations are defined in two manners on
point clouds: spectral based (Yi et al., 2017) and non-
spectral based (Wang et al., 2019). Compared to the
aforementioned approaches, the graph-based models
provide more powerful tools to exploit local structures
of the 3D data. Therefore, graph CNN has draw sig-
nificant attention among the community.
Self- and Weakly-supervised Learning on Point
Cloud. Self-supervised learning aims to predict
for output labels that are generated from the intrinsic
information of the data, so to reduce the amount of
manually labeled data needed as for fully supervised
learning. Unlike 2D data, the labeling of large scale
3D point cloud data is much more difficult and labo-
rious. To alleviate the use of labeled data, a number
of self-supervised models have been proposed lately
(Achlioptas et al., 2018; Sauder and Sievers, 2019;
Yang et al., 2018; Zhang and Zhu, 2019). Zhang
and Zhu proposed the Contrast-ClusterNet (Zhang
and Zhu, 2019) with pre-text tasks of first predicting
whether two segments are from the same object, lead-
ing to the ContrastNet for obtaining self-learned fea-
tures, which are then used for separating the objects
into different clusters using KMeans++, for train-
ing another network called ClusterNet to obtain re-
fined self-learned features. Their work has shown
the capability of learning effective features in a self-
supervised manner by conducting object classification
using an SVM classifier. However, this process still
requires to know a set of 3D points belong to a single
object. In training the SVMs, the same amount of la-
beled data as in supervised models is used, therefore
decreasing the benefits of leaving out annotations in
self-supervised learning.
Inspired by the works of weakly-supervised learn-
ing (Xu et al., 2019; Xu and Lee, 2020), we study
weakly-supervised 3D point classification by utiliz-
ing few labeled data to train the SVM classifier with
the learned features through the aforementioned self-
supervised learning. Furthermore, our method is ca-
pable of performing on complex scene data (Munoz
et al., 2009; Hackel et al., 2017) without prior as-
sumptions of 3D points belong to the same objects.
These two improvements greatly unleash the power of
the self-supervised learning model on 3D point cloud
data understanding.
3 METHOD
We propose a new snapshot-based approach using
the Contrast-ClusterNet (Zhang and Zhu, 2019) as
the backbone. Our approach consists of two major
components: Snapshot-based self-supervised feature
learning, and weakly-supervised classification. The
Snapshot-based self-supervised feature learning, as
an analogy to taking snapshots with a camera, cap-
tures small areas of the scene point cloud to train the
model. We then use the trained model for feature ex-
traction and apply weak-supervision to the extracted
features for classification tasks.
3.1 Self-supervised Learning with
Snapshots
Self-supervised learning often requires prior knowl-
edge about the input data to ensure the intrinsic in-
formation of the data, from which the labels are de-
rived, is consistent across all samples. In the case of
the Contrast-ClusterNet (Zhang and Zhu, 2019), such
prior assumption is that each training sample must be
from a single point cloud object to enable part con-
trasting, which essentially predicts whether two parts
are split from the same object. This assumption is
kept true on datasets like ModelNet (Wu et al., 2015a)
and ShapeNet (Chang et al., 2015), where each data
sample is a synthetic CAD model. However, this soon
becomes a limitation on real-life point cloud datasets,
such as the Okaland (Munoz et al., 2009) and Seman-
tic3D (Hackel et al., 2017) data, where an entire point
cloud is a complex scene.
The Pipeline. To address this issue, we propose the
snapshot-based method for the self-supervised feature
learning, which has three major steps: snapshot cap-
turing, feature learning, and feature extraction (Figure
2). Given a real-life point cloud dataset, a snapshot
capturing step generate local collections of points as
snapshot samples (Figure 1(a)). In each sampling,
an anchor point is randomly selected from the point
cloud at first, then the kNN pioints are collected to
the anchor point, where k defines the snapshot sam-
pling area, as a snapshot. Each ‘snapshot’ is treated
as a single point-cloud object and is fed into the three-
stage Contrast-ClusterNet for feature learning(Figure
1(b)). In the training of a ContrastNet, we follow the
random split procedure, as described in (Zhang and
Zhu, 2019): two segments from the same snapshot
make up a positive pair with the label 1, and a negative
pair consisting of two segments from two different
snapshots is labeled as 0. Then the learned features
are used in obtaining pseduo-labels of snapshots with
KMeans++, which then are used to train a ClusterNet
A Snapshot-based Approach for Self-supervised Feature Learning and Weakly-supervised Classification on Point Cloud Data
401
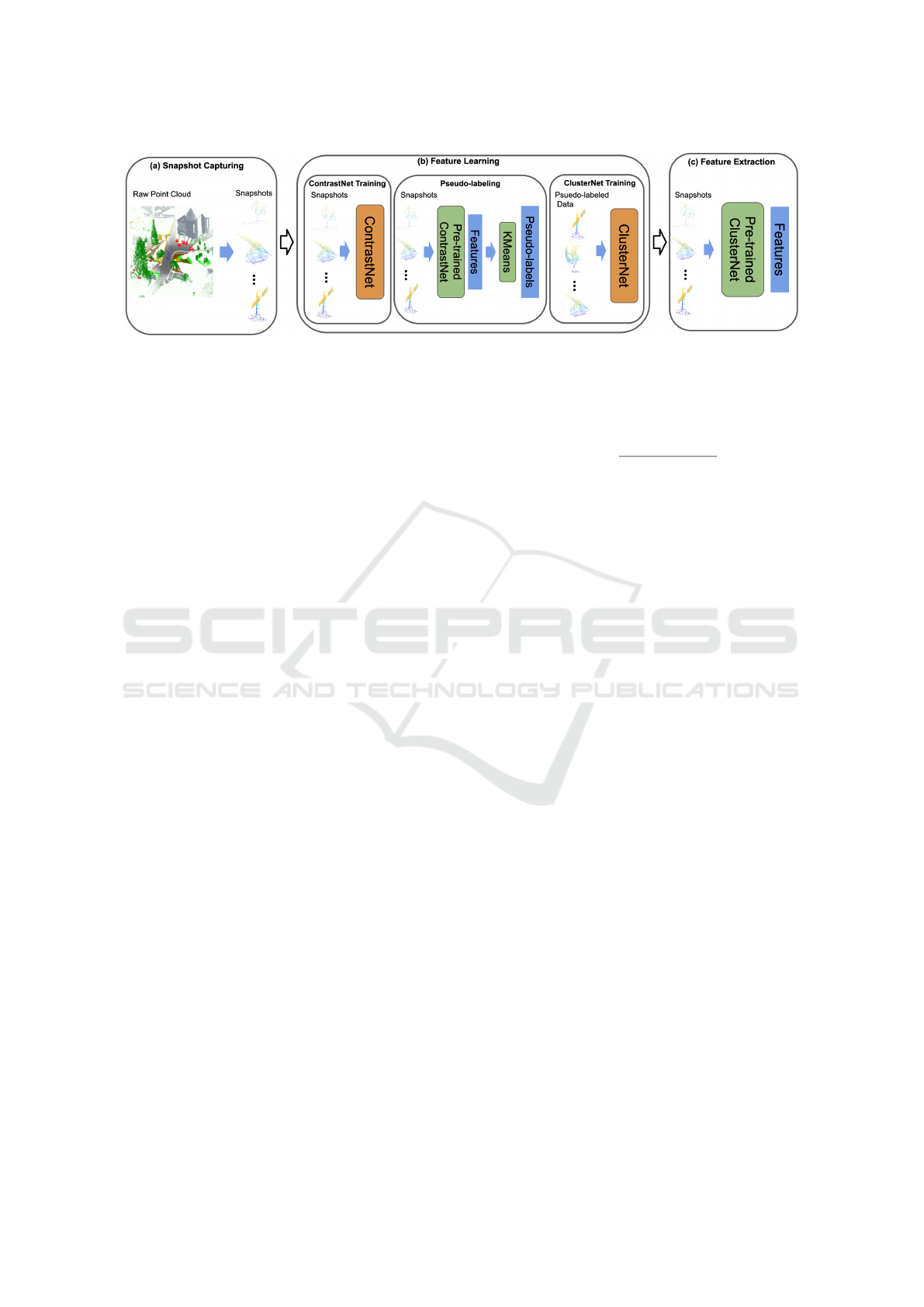
Figure 2: The Snapshot-based self-supervised feature learning pipeline: (a) Snapshot sampling from raw point cloud; (b)
Feature learning by part contrasting, snapshot clustering and cluster classification; (c) Snapshot feature extraction by the
previously trained ClusterNet.
for extracting more fine-grained features. Finally in
feature extraction (Figure 1(c)), features of the snap-
shots are extracted using the pre-trained ClusterNet.
Impurity of Snapshots. Since the anchor point se-
lection happens randomly, it is possible to have the
anchor sitting close to the border between objects of
different semantic classes. This introduces a certain
degree of impurity to the snapshot by including some
points from other classes. Compared to the object
based part contrasting, where the points of a sam-
ple need to be of exactly from the same object even
though its class label is not used during the training,
this method fundamentally sees each snapshot as a
collection of points that represent a small region of
the bigger scene, and statistically, a large portion of
the points in a snapshot belongs to one semantic class.
In our experiment section, we will show how the
impurity of data will affect the performance of feature
learning for later snapshot classification. To quan-
tify the impurity of the snapshots, we present a met-
ric to evaluate our snapshot sampling quality. For
easy understanding, we take the opposite of the impu-
rity, namely purity. When sampling from the Oakland
(Munoz et al., 2009) and Semantic3D (Hackel et al.,
2017), we utilize the original labels in these datasets
to approximate the class label of each snapshot for the
sake of snapshot classification; in our future work we
will explore scene clustering and segmentation with-
out using any label information.
A label is assigned to a snapshot by voting from all
associated points in that sample. The class that most
points agree on is chosen as the label for the snapshot,
the voting procedure can be parameterized as:
C
x
= argmax
i
K
∑
j=1
I(y
j
= i), (1)
where x is the snapshot sample, y
j
is the point-wise la-
bel for x ( j=1,...,K), K represents the number of points
in the snapshot x, and I is an indicator function for the
class of each point. Thus the purity is given by
P(x) =
∑
k
j=1
I(y
j
= C
x
)
k
(2)
The statistics of the voted class labels and the purity
for each sample will be further discussed in Section
4.1 using real examples.
3.2 Classification with Fewer Labels
End to end fully-supervised learning requires a sig-
nificant amount of labeled data for training purposes,
and frequently in real life scenarios, large amount
of labels are not available right away when needed
for full-supervision. However, obtaining a few la-
beled data in a short notice is relatively cost effective.
Therefore, we further explore a weakly-supervised
approach for classification, where far fewer labels are
required to fulfil the tasks.
After the self-supervised feature learning, a clas-
sifier is trained on the extracted features of labeled
training data for classification. We choose the SVM
as our classifier and train it with various numbers of
labeled data, whose features are extracted from the
training samples by the pre-trained ClusterNet. The
numbers of samples for training are organized as de-
clining percentages of the total training data: 100%,
50%, 20%, 10%, 5%, and 1%. As a comparison, the
fully-supervised model DGCNN (Wang et al., 2019)
is trained on each percentage of samples alongside
our model to show the performance comparison.
4 RESULTS
Extensive experiments are conducted to evaluate the
effectiveness of our proposed snapshot-based ap-
proach for both self-supervised feature learning and
weakly-supervised point cloud classification. The im-
plementation and experimental results are described
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
402

in details in the following sub-sections, including
(1) datasets and snapshot generation/evaluation; (2)
snapshot-based feature learning; (3) point cloud clas-
sification with fewer labeled data; and (4) evaluation
of clustering with snapshots. The code can be found
at https://github.com/Aleexy/snapshot clusternet.
4.1 Datasets and Snapshots
Datasets. In this work, experiments are carried out on
three point cloud datasets: the Oakland point cloud
dataset (Munoz et al., 2009), the Semantic3D large
scale point cloud classification benchmark (Hackel
et al., 2017), and the ModelNet40 (Wu et al., 2015a).
Both the Oakland and Semantic3D datasets are com-
plex scene point cloud data. The Oakland dataset has
only one single scene, containing 1.6 million points,
divided into five classes: scatter misc, default wire,
utility pole, load bearing, and facade. The Seman-
tic3D consists of a variety of scenes across eight
classes: man-made terrain, natural terrain, high vege-
tation, low vegetation, buildings, hard scape, scanning
artefacts, and cars (Figure 1). Considering the huge
scale of this dataset (4 billion points) is beyond our
computational capacity, we only choose two scenes,
named ‘untermaederbrunnen3’ and ‘bildstein3’ for
our experiments. The ModelNet40 dataset is a collec-
tion of synthetic point cloud objects across 40 classes,
where there are roughly 9840 single objects in the
training set and 2468 in the test set.
Sample Balancing. Compared to the synthetic
dataset ModelNet40, the two real life datasets are
heavily unbalanced toward certain classes. To thor-
oughly evaluate our method, we first apply two re-
sampling schemes to the Semantic3D dataset before
taking on the proposed sampling method. The origi-
nal unbalanced dataset is notated as OUD, on which
two resampling schemes are applied:
(1) Upsampling and downsampling based on the
class distributions. Points from each class are evenly
removed or duplicated with some noises according to
the size of each class. The resulted new balanced
dataset (BD) has all eight classes with numbers of
points close to each other.
(2) Shifting duplicated points, and shrinking dis-
tances between downsampled points. When upsam-
pling a class, all included points are duplicated and
then shifted around as a whole. While shifting en-
sures that the class density is not destructed by clut-
tering a large amount of duplicates in the same region,
the shrinking process also approximately maintains
the original sampling rate. We notate the balanced
dataset by shifting and shrinking as SSBD.
Snapshot Generation. The snapshot based sampling
is applied to the Oakland dataset and all three configu-
rations of the Semantic3D benchmark, namely OUD,
BD, and SSBD. We generate 5000 samples from the
Oakland dataset for training and 500 samples for test-
ing, with 1024 points in each sample. Similarly, we
generate 8000 samples from each chosen scene of the
Semantic3D as training set and 800 each for testing.
Due to the high resolution of the Semantic3D, the
snapshot sampling described above is slightly altered
to capture larger area. We collect 10 times of points
that are nearest to the anchor point through kNN,
which forms a mega snapshot of 10240 points. To
reduce the size of the mega snapshot while maintain-
ing the new sparse sampling rate, the mega snapshot
is further subsampled five times at the size of 1024
points, and the resulting five snapshots are kept as the
training or test samples.
Snapshot Purity. Based on the proposed purity met-
ric, we run the snapshot sampling procedure 100
times on both the Okaland and Semantic3D datasets
for sampling statistics. As shown in Table 1, the snap-
shot purity of a class is correlated with the numbers of
snapshots being sampled. From the point-wise per-
spective, when choosing an anchor point, each point
in the scene has equal chance being selected due
to random sampling. However, class-wise speaking,
points from less abundant classes have smaller prob-
abilities being selected as the anchor, which leads to
smaller numbers of generated samples. Further more,
when collecting points surrounding a small class an-
chor, the chance of including inter-class points is rel-
atively higher. Therefore, the purity of snapshots can
be improved by re-balancing the distribution of the
dataset, and this is illustrated in Table 2, where sam-
ples from the resampled BD and SSBD have higher
purity than the OUD samples.
We can see that the overall snapshot purity of both
datasets, despite different configurations, is above
90%. This meets our assumption that a snapshot is
highly capable of resembling a piece of from one ob-
ject class.
Snapshots Versus Objects. To comparatively
evaluate our method, we also apply the same sam-
pling procedure on each class grouped by the original
labels, in contrast to the whole scene of point cloud.
Consequently, samples obtained exclusively from a
class have 100% purity, and we refer to them as ‘ob-
jects’ in contrast to ‘snapshots’. The object-based ap-
proach is mainly for comparison, even though it may
have its own value if obtaining objects are possible.
A Snapshot-based Approach for Self-supervised Feature Learning and Weakly-supervised Classification on Point Cloud Data
403
Table 1: Statistics of snapshot sampling on the Oakland dataset, where 5000 snapshots are sampled at each run, for 100 runs.
The purity (mean and variance in percentile) stands for the percentage of points agree on the voted class of one snapshot.
Samples represents the number of snapshots being sampled for each class (mean and variance).
Scatter Misc Default Wire Utility Poles Load Bearing Facade Overall
Purity (%)
91.3 ± 0.42 35.08 ± 20.74 1.74 ± 6.93 98.37 ± 0.13 89.92 ± 0.78 96.08 ± 0.15
Samples
1092.93 ± 31.93 1.49 ± 1.27 0.06 ± 0.24 3476.3 ± 35.71 429.22 ± 18.73
5000
Table 2: Statistics of snapshot sampling on all three configurations on the two scenes from the Semantic3D dataset (Scene
1: ‘Untermaederbrunnen3’; Scene 2:‘Bildstein3’). The sampling is conducted 100 times, with 8000 samples per time. ‘-’
indicates no snapshots being sampled.
Purity (%)
Man Made
Terrain
Natural
Terrain
High
Vegetation
Low
Vegetation
Buildings
Hard
Scape
Scanning
Artefacts
Cars Total
Scene 1
OUD
98.45
±0.28
57.47
±10.23
95.68
±2.91
92.69
±1.94
99.48
±1.45
97.02
±0.8
73.2
±32.41
87.85
±4.46
98.39
±0.19
BD
94.64
±0.93
92.83
±0.89
98.16
±0.47
95.51
±0.83
97.02
±0.63
96.17
±0.76
92.99
±0.81
98.5
±0.51
95.74
±0.28
SSBD
98.16
±0.45
82.69
±1.23
97.44
±0.65
93.03
±0.88
95.68
±0.59
98.22
±0.65
82.7
±1.31
92.63
±1.0
92.93
±0.32
Scene 2
OUD
94.45
±0.89
96.46
±0.36
95.13
±0.75
91.59
±1.22
94.22
±1.1
94.25
±0.74
-
85.59
±2.81
94.96
±0.28
BD
85.95
±1.38
88.33
±1.39
91.27
±1.03
95.09
±0.71
94.5
±0.79
91.7
±0.87
91.14
±0.94
98.56
±0.44
92.37
±0.37
SSBD
88.96
±1.18
98.31
±0.54
86.69
±1.3
95.84
±0.72
91.33
±0.9
93.06
±1.07
78.14
±1.5
88.95
±0.95
90.63
±0.4
4.2 Snapshot-based Feature Learning
To verify our snapshot based approach for self-
supervised feature learning, we conduct experiments
on both snapshots and objects derived from the
datasets of Oakland and Semantic3D. The evaluations
are based on the classification accuracy on the testing
samples of an SVM (Linear kernel) trained on the ex-
tracted features of training samples.
On the Same Scenes. Table 3 shows that, our
snapshot-based method is able to achieve higher ac-
curacy than the DGCNN (a supervised method) us-
ing 100% and 10% of the training samples. It is also
shown that the snapshot-based method is more robust
than the object-based ClusterNet and the DGCNN
when the labeled training data reduces. On the Oak-
land data, the accuracy drops by 4.6% from 90.6%
on the snapshot-based method when the training data
decreases from 100% to 10% whereas the DGCNN
drops 9.58% from 85.21%. On the OUD, our method
performs only slightly worse (0.88%) with 10 times
fewer training data. As a comparison, the DGCNN
performs 5.25% worse on the snapshots and 14.75%
worse on the objects, and the object-based Cluster-
Net also drops 3.25% on the accuracy. The shown
results validate our hypothesis that the proposed
snapshot-based method is able to learn effective fea-
tures from the raw point cloud complex scene in a
self-supervised manner.
We would like to point out that class labels were
used in re-sampling the data to generate balanced
datasets. This seems to contradict to our assumption
of not using labels for generating snapshots, but the
goal is to show if our snapshot approach can work as
well on unbalanced data as on balanced data. Results
in Table 3 suggest that the performance on the original
unbalanced data (OUD) is similar or even better than
on the resampled and thus balanced datasets BD and
SSBD. This indicates that even without resampling,
our model is robust for feature learning, therefore re-
sampling is not necessary in practice: despite the two
classes in the OUD have low purity score (Table2), the
overall accuracy still shows that this model is robust
enough to learn from the “noisy” snapshot inputs.
Table 3: Classification performance on the snapshots and
objects from the Oakland dataset and the three configura-
tions of the scene, ‘untermaederbrunnen3’ in the Seman-
tic3D dataset, using the our method and DGCNN. Data per-
centage represents the amount of labeled data used in the
training.
Ours DGCNN
Data
Percentage
100% 10% 100% 10%
Oakland
Snapshots 90.6% 86.0% 85.21% 75.63%
Objects 98.4% 94.4% 100% 86.88%
OUD
Snapshots 96.38% 95.5% 86.5% 71.5%
Objects 98.13% 94.88% 85.88% 71.13%
BD
Snapshots 97.75% 95.25% 91.88% 75.5%
Objects 98.63% 93.5% 87.75% 77.13%
SSBD
Snapshots 97.25% 92.75% 90.13% 80.38%
Objects 94.88% 87.88% 90.00% 69.13%
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
404
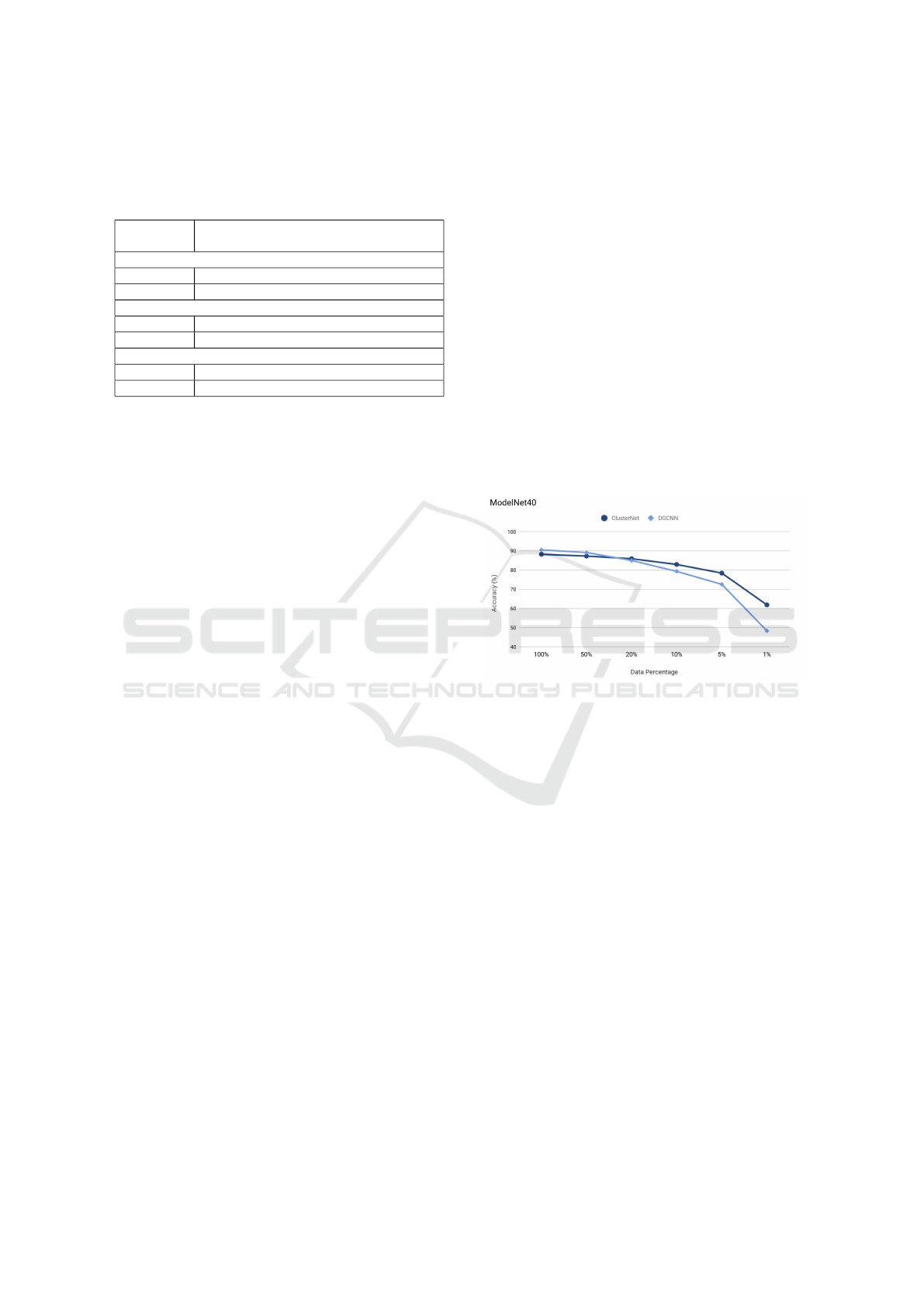
Table 4: Classification performance of our method on the
scene ‘Bildstein’, using ClusterNet pre-trained on the scene
‘Untermaederbrunnen3’ and fine-tuned on increasing per-
centages of samples from ‘Bildstein’.
Data
Percentage
0% 1% 5% 10% 20%
OUD
Snapshots 89.38 91.88 91.75 92.13 92.13
Objects 98.25 97.38 98.25 98.63 98.5
BD
Snapshots 95.88 96.38 96.5 96.88 96.88
Objects 98.13 98.75 98.5 98.0 98.5
SSBD
Snapshots 94.88 96.13 96.5 97.0 97.13
Objects 98.5 98.25 98.5 98.63 98.63
On Different Scenes. We further evaluate the gen-
eralization ability of the learned features with and
without fine tuning the pre-trained ClusterNet on in-
creasing percentages of samples from another scene
in the Semantic3D dataset. The model is first trained
on snapshots or objects from the scene ‘Untermaeder-
brunnen3’, then fine tuned and tested on samples from
the scene ‘Bildstein’. For this task, we use all 100%
of the training data in the first scene to train the SVM
classifier. The results are shown in Table 4. We
can see that the accuracy of classifying OUD snap-
shots starts from 89.38% when fine tuning is not ap-
plied (0% fine tuning data), and it increases to 92.13%
when further trained on 20% of the fine tuning data, a
2.75% improvement. In comparison, the performance
difference of classifying OUD objects without and
with fine-tuning is neglectable (0.25%). Hence, such
a boost on performance by fine tuning on small por-
tion of training data is more significant on the snap-
shots compared to the objects. This is also seen from
the BD and SSBD data, where the performance dif-
ferences without and with 20% fine-tuning are larger
in snapshots than objects, which are 1.00% vs 0.37%,
and 2.25% vs 0.13%, respectively.
It is worth noting that when evaluating the pre-
trained model directly on the testing snapshots from
another scene, the yielded accuracy is much lower on
the OUD than the BD and SSBD, compared to test-
ing on the same scene (shown in Table 3). This is due
to the different class distribution between the OUD
of the two scenes. Without resampling the dataset to
balance out the class distribution, an under-sampled
class could be over-sampled in another scene and con-
tributes to feature bias.
4.3 Classification with Fewer Labels
After the self-supervised feature learning, an SVM
classifier is trained on the features extracted by the
pre-trained ClusterNet. To verify the effectiveness
of the proposed weakly supervised classification, we
gradually reduce the amount of labels involved in the
training of the SVM. As a comparison, we train the
end-to-end model DGCNN in the same manner. Ex-
periments are conducted on the ModelNet40, Oak-
land dataset, and the three configurations of the Se-
mantic3D.
On ModelNet40. Figure 3 illustrates how the per-
formance is different between our method and the
DGCNN on a decreasing number of training samples
on ModelNet40. DGCNN begins with a higher accu-
racy than the ClusterNet when trained on all labeled
data, but the performance drops rapidly when the data
supply reduces. With 20% of the labeled data, the
ClusterNet starts to outperform the DGCNN and the
advantage becomes larger when the labeled data fur-
ther reduces. On 5% labeled data, the DGCNN is at a
72.61% accuracy while our method maintains a much
higher performance (78.48%).
Figure 3: Comparison of the classification accuracies be-
tween the ClusterNet and DGCNN on decreasing numbers
of labeled data from the ModelNet40.
On Oakland and Semantic3D Datasets. Figure 4
shows the same comparison on the real life datasets.
Our snapshot-based method shows an advantage on
classifying snapshots than the DGCNN on all four
training scenarios. The ClusterNet performance also
shows a higher resistance on the reducing of labeled
data. Using labeled data from 100% to 5%, the Clus-
terNet accuracy only drops by 8.0%, 1.5%, 4.25%,
and 6.25% for (a) Oakland, (b) OUD, (c) BD and
(d) SSBD, to 82.6%, 94.88%, 93.5% and 91.0%, re-
spectively. In comparison, the similar trend of the
DGCNN shown on the ModelNet40 is observed on
the BD and SSBD cases, that the accuracy declines
drastically with fewer labeled data available for train-
ing.
4.4 Evaluate Clustering Performance
We also present the feature embedding using t-SNE
(Figure 5) of the snapshots to show the capability of
the snapshot-based self-supervised features for con-
A Snapshot-based Approach for Self-supervised Feature Learning and Weakly-supervised Classification on Point Cloud Data
405

Figure 4: Comparison of the snapshots and objects classification accuracies between the ClusterNet and DGCNN on de-
creasing numbers of labeled data on complex scene point cloud datasets. The OUD, BD, and SSBD are three sampling
configurations derived from the Semantic3D benchmark. Solid lines are results on the snapshots and dotted lines represent
the objects.
ducting clustering task when no labels are available.
It can be seen that snapshots from the same class tend
to stay closer to each other. There are classes being
separated into different clusters, however, most clus-
ters can be well separated from each other, which ver-
ifies the discriminative power of the features learned
by the proposed method.
Figure 5: Visualization of the feature embedding of the
snapshots from the Oakland dataset and the three Seman-
tic3D configurations. The clusters are colored on the labels
for visualization.
5 CONCLUSION
In this work, we have proposed a snapshot-based self-
supervised model for feature learning on the complex
scene point cloud dataset, and a weakly-supervised
method for point cloud classification. The proposed
methods are evaluated and verified on a synthetic
point cloud dataset and two real life complex scene
datasets. The experimental results indicate that our
method is capable of learning effective features from
unlabeled complex scene point cloud dataset, even
without resampling the data. Moreover, the weakly-
supervised classification method is shown to be able
to outperform the end-to-end model DGCNN when
training with fewer labeled data. In future works, the
impact of snapshot sampling rates on feature quality
will be further investigated, which could potentially
be adopted with a 3D Lidar to capture properly sized
snapshots for real time learning.
ACKNOWLEDGMENTS
The research is supported by National Science Foun-
dation through Awards PFI #1827505 and SCC-
Planning #1737533, and Bentley Systems, Incorpo-
rated, through a CUNY-Bentley CRA 2017-2020.
Additional support is provided by a CCNY CEN
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
406

Course Innovation Grant from Moxie Foundation,
and the Intelligence Community Center of Academic
Excellence (IC CAE) at Rutgers University (Awards
#HHM402-19-1-0003 and #HHM402-18-1-0007).
REFERENCES
Achlioptas, P., Diamanti, O., Mitliagkas, I., and Guibas, L.
(2018). Learning representations and generative mod-
els for 3d point clouds. In International conference on
machine learning, pages 40–49. PMLR.
Apple Inc. (2020). iPad Pro. https://www.apple.com/
ipad-pro/specs/.
Bhargava, P., Kim, T., Poulton, C. V., Notaros, J., Yaa-
cobi, A., Timurdogan, E., Baiocco, C., Fahrenkopf,
N., Kruger, S., Ngai, T., Timalsina, Y., Watts, M. R.,
and Stojanovi
´
c, V. (2019). Fully integrated coherent
lidar in 3d-integrated silicon photonics/65nm cmos.
In 2019 Symposium on VLSI Circuits, pages C262–
C263.
Caron, M., Bojanowski, P., Joulin, A., and Douze, M.
(2018). Deep clustering for unsupervised learning of
visual features. In Proceedings of the ECCV, pages
132–149.
Chang, A. X., Funkhouser, T., Guibas, L., Hanrahan, P.,
Huang, Q., Li, Z., Savarese, S., Savva, M., Song, S.,
Su, H., Xiao, J., Yi, L., and Yu, F. (2015). Shapenet:
An information-rich 3d model repository.
Gong, J. (2013). Mobile lidar data collection and analy-
sis for post-sandy disaster recovery. In Computing in
Civil Engineering (2013), pages 677–684.
Gong, J., Zhou, H., Gordon, C., and Jalayer, M. (2012).
Mobile terrestrial laser scanning for highway inven-
tory data collection. In Computing in Civil Engineer-
ing (2012), pages 545–552.
Hackel, T., Savinov, N., Ladicky, L., Wegner, J. D.,
Schindler, K., and Pollefeys, M. (2017). SEMAN-
TIC3D.NET: A new large-scale point cloud classifica-
tion benchmark. In ISPRS Annals of the Photogram-
metry, Remote Sensing and Spatial Information Sci-
ences, volume IV-1-W1, pages 91–98.
Hu, X. and Gong, J. (2018). Advancing smart and re-
silient cities with big spatial disaster data: Challenges,
progress, and opportunities. In Data Analytics for
Smart Cities, pages 53–90. Auerbach Publications.
Huang, J. and You, S. (2016). Point cloud labeling using
3d convolutional neural network. In 2016 23rd Inter-
national Conference on Pattern Recognition (ICPR),
pages 2670–2675. IEEE.
Jing, L., Yang, X., Liu, J., and Tian, Y. (2018). Self-
supervised spatiotemporal feature learning via video
rotation prediction. arXiv preprint arXiv:1811.11387.
Kanezaki, A., Matsushita, Y., and Nishida, Y. (2018). Ro-
tationnet: Joint object categorization and pose estima-
tion using multiviews from unsupervised viewpoints.
In Proceedings of the IEEE CVPR, pages 5010–5019.
Maturana, D. and Scherer, S. (2015). Voxnet: A 3d con-
volutional neural network for real-time object recog-
nition. In 2015 IEEE/RSJ International Conference
on Intelligent Robots and Systems (IROS), pages 922–
928. IEEE.
Munoz, D., Bagnell, J. A. D., Vandapel, N., and Hebert, M.
(2009). Contextual classification with functional max-
margin markov networks. In Proceedings of IEEE
CVPR.
Noroozi, M. and Favaro, P. (2016). Unsupervised learn-
ing of visual representations by solving jigsaw puz-
zles. Lecture Notes in Computer Science, page 69–84.
Novotny, D., Larlus, D., and Vedaldi, A. (2017). Learning
3d object categories by looking around them. 2017
IEEE International Conference on Computer Vision
(ICCV).
Qi, C. R., Su, H., Mo, K., and Guibas, L. J. (2017a). Point-
net: Deep learning on point sets for 3d classification
and segmentation. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 652–660.
Qi, C. R., Su, H., Nießner, M., Dai, A., Yan, M., and
Guibas, L. J. (2016). Volumetric and multi-view cnns
for object classification on 3d data. In Proceedings of
the IEEE CVPR, pages 5648–5656.
Qi, C. R., Yi, L., Su, H., and Guibas, L. J. (2017b). Point-
net++: Deep hierarchical feature learning on point sets
in a metric space. In Advances in neural information
processing systems, pages 5099–5108.
Sauder, J. and Sievers, B. (2019). Context prediction for
unsupervised deep learning on point clouds. arXiv
preprint arXiv:1901.08396.
Su, H., Maji, S., Kalogerakis, E., and Learned-Miller, E. G.
(2015). Multi-view convolutional neural networks for
3d shape recognition. In Proc. ICCV.
Wang, Y., Sun, Y., Liu, Z., Sarma, S. E., Bronstein, M. M.,
and Solomon, J. M. (2019). Dynamic graph cnn
for learning on point clouds. ACM Transactions on
Graphics (TOG), 38(5):1–12.
Wu, Z., Song, S., Khosla, A., Yu, F., Zhang, L., Tang, X.,
and Xiao, J. (2015a). 3d shapenets: A deep represen-
tation for volumetric shapes. In Proceedings of the
IEEE CVPR, pages 1912–1920.
Wu, Z., Song, S., Khosla, A., Yu, F., Zhang, L., Tang, X.,
and Xiao, J. (2015b). 3d shapenets: A deep repre-
sentation for volumetric shapes. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 1912–1920.
Xu, K., Yao, Y., Murasaki, K., Ando, S., and Sagata, A.
(2019). Semantic segmentation of sparsely annotated
3d point clouds by pseudo-labelling. In 2019 Inter-
national Conference on 3D Vision (3DV), pages 463–
471.
Xu, X. and Lee, G. H. (2020). Weakly supervised semantic
point cloud segmentation: Towards 10x fewer labels.
In Proceedings of the IEEE/CVF CVPR, pages 13706–
13715.
Yang, Y., Feng, C., Shen, Y., and Tian, D. (2018). Fold-
ingnet: Point cloud auto-encoder via deep grid de-
formation. In Proceedings of the IEEE CVPR, pages
206–215.
A Snapshot-based Approach for Self-supervised Feature Learning and Weakly-supervised Classification on Point Cloud Data
407

Yi, L., Su, H., Guo, X., and Guibas, L. (2017). Syncspec-
cnn: Synchronized spectral cnn for 3d shape segmen-
tation. 2017 IEEE CVPR.
Zhang, L. and Zhu, Z. (2019). Unsupervised feature learn-
ing for point cloud understanding by contrasting and
clustering using graph convolutional neural networks.
In 2019 International Conference on 3D Vision (3DV),
pages 395–404. IEEE.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
408
