
An ALPR System-based Deep Networks for the Detection and
Recognition
Mouad Bensouilah, Mohamed Nadjib Zennir and Mokhtar Taffar
Department of Computer Science, Jijel University, BP 98, Ouled Aissa, 18000, Jijel, Algeria
Keywords:
Computer Vision, Convolutional Neural Networks, Recurrent Neural Networks, GRU, LSTM, Object
Detection and Recognition, OCR, License Plates Recognition.
Abstract:
Automatic license plates reading (ALPR), from images or videos, is a research topic that is still relevant in
the field of computer vision. In this article, we propose a new dataset and a robust ALPR system based on the
YOLO object detector of literature. The trained Convolutional Neural Networks (CNN) allow us to extract
features from license plates and label them through Recurrent Neural Networks (RNN) specialized character
recognition. RNN are supported by GRU units instead of LSTM units that are generally used in the literature.
The experiments results were conclusive reaching a recognition rate of 92%.
1 INTRODUCTION
In recent years, deep learning techniques have
achieved good performances in the computer vision
field particularly for tasks such as detecting objects
and recognizing their class by offering different deep
network models. These techniques have paved ways
and allowed researchers to use powerful deep learn-
ing models to develop more performant algorithms
and real systems like these used in the field of license
plate recognition.
Automatic license plate reading (ALPR) is a com-
mon task these days. It is used for many appli-
cations such as transport, road safety, parking, etc.
A large number of ALPR approaches (Liu et al.,
2011)(Du et al., 2012)(Khan et al., 2017)(Cheang
et al., 2017)(Laroca et al., 2018) have been proposed
in the literature, some of which have been marketed
on real world systems.
Most existing algorithms need segmentation as
a pre-treatment for plate and/or character detection.
Unfortunately, there is no robust segmentation tech-
nique for the variety of constraints to which fonts
are subjected and which cause great variability in
the appearance of characters such as: rotations,
scale changes, blurring, lighting variations and noise
(
ˇ
Spa
ˇ
nhel et al., 2017).
In this article we propose a recent approach as
an alternative for the recognition of license plates
without segmentation. It is based on the YOLO
object detector (Redmon et al., 2016)(Redmon and
Farhadi, 2017)(Redmon and Farhadi, 2018) and Re-
current Convolutional Neural Networks (CRNN)(Shi
et al., 2016).
YOLO (Redmon et al., 2016), based on CNN,
is an object detection algorithm, fast, and effective,
and easy to integrate for real applications, with three
versions of YOLO, YOLOv2 (Redmon and Farhadi,
2017) and YOLOv3 (Redmon and Farhadi, 2018).
YOLOv3 is the last version which was optimized
from the previous, with accuracy improved while
maintaining speed and performance. We trained
YOLOv3 with two backbones: Darknet-53 (Red-
mon and Farhadi, 2018) and MobileNets (Andrew
G. Howard, 2017); on the ImageNet pre-training
model. The test results show that the trained YOLOv3
have extremely high recall and precision.
CRNN proposed by (Shi et al., 2016) is a general
framework for character recognition. We applied an
improved CRNN based on CNN for extracting fea-
ture sequences of license plate images, and we used
a 2-layer bidirectional Gated Recurrent Unit (GRU)
(Cho et al., 2014) for labeling sequences. The original
CRNN uses for labeling sequences a popular variant
which is Long Short Term Memory (LSTM) (Hochre-
iter and Schmidhuber, 1997) having more complex
structure than GRU. We used Connectionist Temporal
Classifier (CTC) loss function proposed by (Graves
et al., 2006) during training process. Test results show
that our CRNN have high accuracy than other models
tested on our dataset. It is important to point out that
the Algerian license plates are far more complex than
204
Bensouilah, M., Zennir, M. and Taffar, M.
An ALPR System-based Deep Networks for the Detection and Recognition.
DOI: 10.5220/0010229202040211
In Proceedings of the 10th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2021), pages 204-211
ISBN: 978-989-758-486-2
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

others, for they have no standard model. Thus, many
kinds of plate patterns are generated from different
fonts, colors, and sizes.
The remainder of the paper is organized as fol-
lows. Section 2 briefly reviews related license plate
recognition literature. Section 3 describes our pro-
posed method. Section 4 introduces publicly our
new ALP dataset, and then we describe in Section
5 the training process on our dataset. The next sec-
tion presents experimental setups and discusses ex-
perimentations and achieved results. Finally, Section
7 concludes the paper.
2 RELATED WORK
In this section, we review recent work that uses deep
learning approaches in the context of ALPR. We dis-
cuss work related to the two phases: plate detection
and plate content recognition.
2.1 Plate Detection
Plate detection is an important phase in the ALPR
system. Numerous research works have proposed
models that specifically use convolutional neural net-
works (CNN). Li et al. (Li et al., 2018) trained a
CNN capable of detecting the license plate based on
the characters in an image. The detected characters
are grouped in text regions and provided as initial
candidates. Then, false positive plates are removed
by a plate/non-plate CNN classifier. This approach
takes more than two seconds to process a single im-
age when running on a NVIDIA Tesla GPU K40c.
Xie et al. (Xie et al., 2018) proposed a YOLO-
based model called MD-YOLO to detect license
plates rotating angle in addition to coordinates and
its trust value. Before MD-YOLO, Xie et al. ap-
plied a CNN to determine the region of interest in an
image, assuming that some distance inevitably exists
between two license plates. This approach was exe-
cuted in real time on three public datasets. Hsu et al.
(Hsu et al., 2017) proposed custom models of YOLO
and YOLO 2.0 specifically for the detection of license
plates. These YOLO’s custom models worked better
and were able to process 54 FPS on a ”GeForce GTX
TITAN X” GPU.
2.2 Plate Recognition
After detection, there is an equally important phase
for an ALPR system, which is reading or recognizing
the content of the plate. For this last phase, there are
many papers proposing different approaches. Selmi et
al. (Selmi et al., 2017), for example, proposed a con-
volutional neural network (CNN) with 37 classes. It
contains four convolutional layers, three pooling lay-
ers, one dropout layer and two fully connected layers.
This model is based on a pre-treatment for the extrac-
tion of candidate characters, and then all candidates
are resized to 32 × 32 pixels in gray levels to feed the
model.
On another hand, Li and Shen (Li and Shen, 2016)
took the gray-level image of the detected license plate
and divided it into regions or sub-images of 24 × 24,
then switched all image regions to a convolutional
neural network (CNN) 9-layers with 36 classes. After
the sub-image recognition, the authors eliminated the
false positives with a BRNN with the LSTM units.
Wu et al. (Wu et al., 2018), however, proposed a
DenseNet based model (Huang et al., 2017), with 68
classes for Chinese license plates. DenseNet is a con-
volutional neural network (CNN) with dense blocks,
containing three types of blocks: convoluted block,
dense block and transition block. In their proposed
model, there are a convoluted block, three dense
blocks and two transition blocks to process a gray-
level image of 136 × 136 pixels and recognize the li-
cense plate. Yet, Spanhel et al. (
ˇ
Spa
ˇ
nhel et al., 2017)
proposed a convolutional neural network (CNN) with
eight output branches recognizing characters on re-
spective positions with 36 classes. It takes a color
image of 200 × 40 pixels as an input.
3 PROPOSED APPROACH
In ALPR systems field, the goal is to build a system
that, from an image, detects license plates and effec-
tively recognizes the existence of writing and charac-
ters in the image. Our approach addresses the prob-
lem of reading license plates in two phases: plate de-
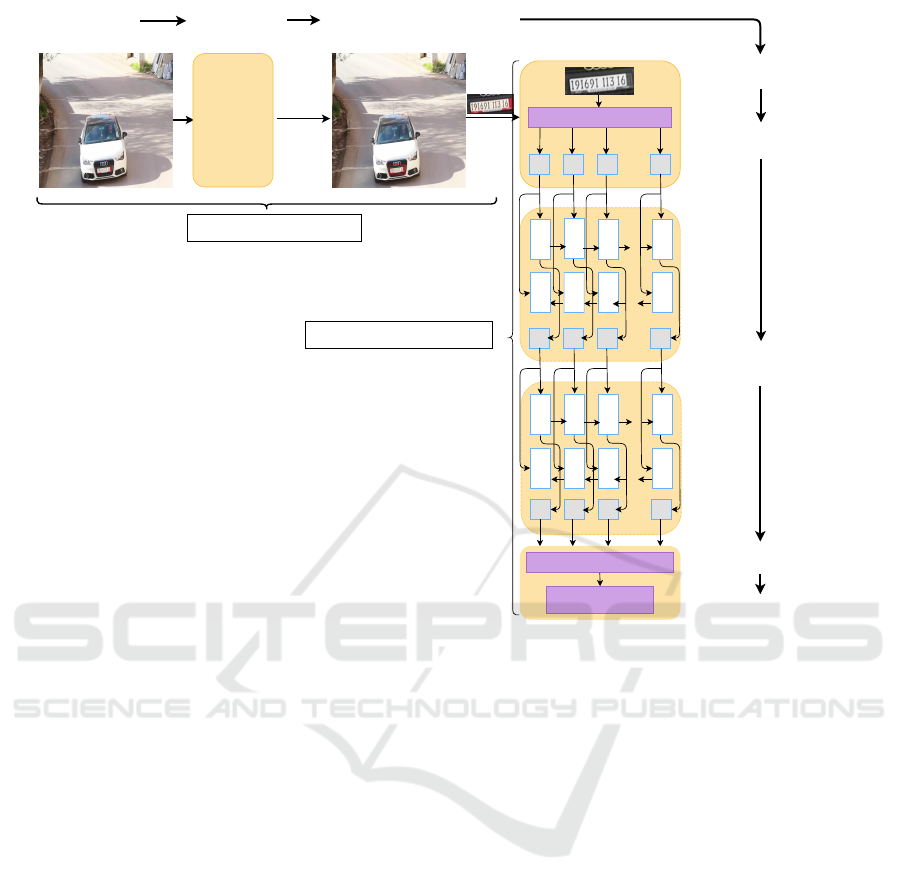
tection followed by plate contents recognition. Figure
1 depicts the overall architecture of our approach.
3.1 Plate Detection
In this first phase, we use the YOLO (Redmon
et al., 2016)(Redmon and Farhadi, 2017)(Redmon
and Farhadi, 2018) object detector from literature. It
is a CNN capable of detecting objects in real time and
thus achieving interesting results in terms of compro-
mise (speed/precision) on datasets of the detection of
published objects, such as Pascal VOC (Everingham
et al., 2010) and Microsoft COCO (Lin et al., 2014).
YOLO uses a single CNN that applies to the entire
image. This network divides the image into regions
and predicts the bounding boxs and probabilities for
An ALPR System-based Deep Networks for the Detection and Recognition
205
...
...
...
...
...
...
P
2L
P
13
P
12
P
11
P
23
P
22
P
21
P
1L
CTC
...
X
1
X
2
X
3
X
L
CNN model
19169111316
1- plate detection
Image Input plate detection Cut and Resize Plates
YOLOv3
Grey-level entry plate
with size 128x64
CNN-based sequence feature
extraction
BRNN-based sequence
labeling
CTC-based sequence
decoding
recognized plate
...
[Bounding
Boxs]
[Scores]
[Classes]
2- plate recognition
G
R
U
G
R
U
G
R
U
G
R
U
G
R
U
G
R
U
G
R
U
G
R
U
G
R
U
G
R
U
G
R
U
G
R
U
G
R
U
G
R
U
G
R
U
G
R
U
Figure 1: General scheme of our approach of license plates recognition.
each. These bounding boxs are weighted by predicted
probabilities. YOLOv3 (Redmon and Farhadi, 2018)
is an update to previous versions of YOLO (Redmon
et al., 2016)(Redmon and Farhadi, 2017); proposed
by Redmon and Farhadi in 2018, it is a more advanced
version than the previous one that is more accurate
and faster.
YOLOv3 (Redmon and Farhadi, 2018) predicts
the boxes at 3 different scales. It extracts the features
of these scales using a concept similar to that of pyra-
mid networks. It uses ”k-means clustering” to deter-
mine the history of encompassing areas. The system
uses 9 clusters and 3 arbitrary scales, and then divides
these clusters evenly between scales.
In this paper, we compare the Darknet-53 feature
extractor (backbone) that is proposed for YOLOv3
(Redmon and Farhadi, 2018) to another named Mo-
bileNets (Andrew G. Howard, 2017). MobileNets
was proposed by Howard et al. of Google Inc. in
2017, and it is faster and provides good results. We
assign to the input the images of 416 ×416 pixels and
use the MobileNet-YOLOv3 implementation (Yang,
2019).
3.2 Plate Recognition
For the second phase, we rely on a type of CRNN net-
work proposed by (Shi et al., 2016). CRNN is a hy-
brid neural network model whose architecture is spe-
cially designed to recognize sequence-like objects in
images. It is a combination of a CNN and an RNN.
To extract the sequence of features from an input
image, the CRNN model accommodates a basic con-
voluted neural network (CNN) by keeping convolu-
tion layers and max-polling layers by eliminating the
fully connected layer. The CNN release is the entry
of the recurrent neural networks (RNN) built to make
labeling for each frame of the sequence of features.
3.2.1 CNN for the Extraction of Features
Each image contains features that set it apart from the
rest of the images. To extract these features, we de-
veloped a model inspired by the CRNN model (Shi
et al., 2016) and CNN model it’s the VGG-12. The
VGG-12 (Simonyan and Zisserman, 2014) consists
of 12 layers (convolution and max-polling). It takes
raw image inputs and produces robust feature maps
that contain high-level descriptions of input images.
In other words, it builds representations that bring out
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
206
the properties of objects learned from the images of
inputs. Because a CNN requires input images to be
scaled to a fixed size to meet its fixed input size, we
fix the input images to the size of 128 × 64 pixels.
3.2.2 RNN for Sequence Labelling
A bidirectional recurrent neural network is built above
convolutional layers, such as recurrent layers. RNN
has a strong ability to capture contextual information
in a sequence (Williams and Zipser, 1995). In our
work, we replace the LSTM (Hochreiter and Schmid-
huber, 1997) units with GRU units (Cho et al., 2014)
in both BRNN layers. GRU was introduced in 2014
by Cho et al. (Cho et al., 2014) to allow each recur-
rent unit to adaptably capture dependencies at differ-
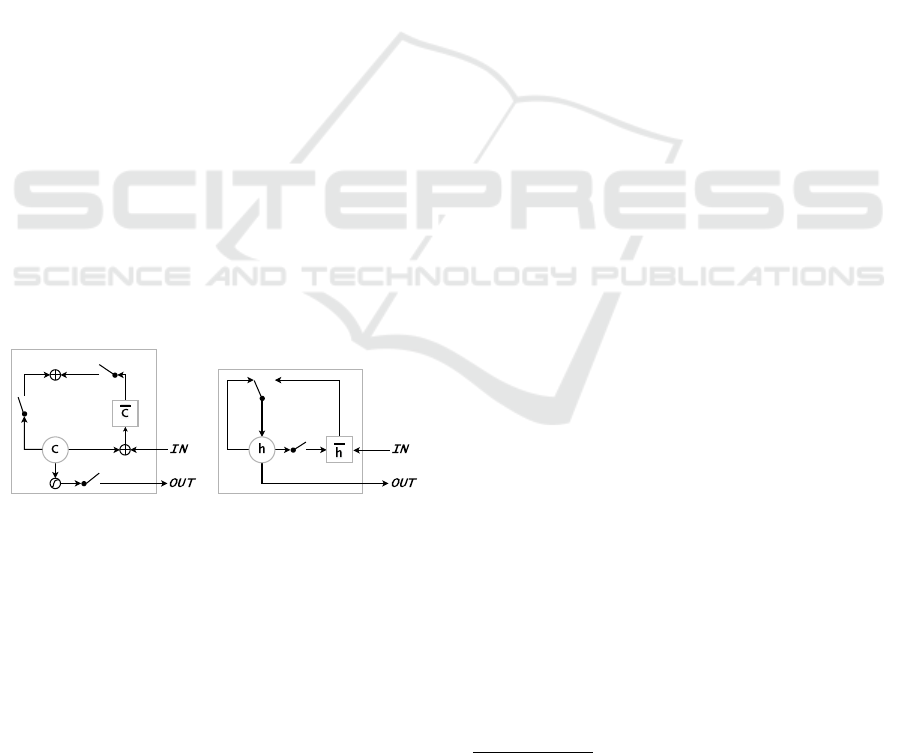
ent time scales (Chung et al., 2014). It is similar to
the LSTM unit (e.g., Figure 2), but easier to calculate
and implement (Fu et al., 2016). The GRU has block-
ing units that modulate the flow of information within
the unit, however, without having separate memory
cells (Chung et al., 2014), represented by the follow-
ing equations (1): Initially, for t = 0, the output vector
is h
0
= 0.
z
t
= σ(W
z
x
t
+U
z
h
t−1
)
r
t
= σ(W
r
x
t
+U
r
h
t−1
)
h
t
= (1 − z
t
)h
t−1
+ z
t
˜
h
t
˜
h
t
= tanh(W
h
x
t
+U
h
(r
t
h
t−1
))
(1)
Where x
t
,h
t
respectively, are the input and output
vectors; z
t
,r
t
represent the update and reset gates vec-
tors with U, W two parameter matrices.
o
f
i
z
r
(a) Long Short-Term Memory (b) Gated Recurrent Unit
Figure 2: Illustration of (a) LSTM et (b) GRU (Shi et al.,
2016).
In addition to the fact that GRU units perform bet-
ter than LSTM, we have augmented the output vector
classes of GRU from 256 to 512 to improve the recog-
nition rate of our model. Table 1 shows the configu-
ration of our CRNN model.
3.2.3 Layer Transcription
Transcription is a process of converting the higher
frame predictions made by the coding module into a
label sequence. Mathematically, the transcription pro-
cedure consists of finding the label sequence with the
highest probability conditioned by predictions about
pre-frames. To accomplish this task, we use the Con-
nectionist Temporal Classification (CTC) proposed
by Graves et al. (Graves et al., 2006). The CTC
is based on a procedure inspired by the ”forward-
backward” algorithm, without segmenting the input
sequence before training.
4 TRAINING
We train YOLOv3 with a single class and mini-
batches (16 images per batch) using our dataset (3408
images of different sizes), with the input image sized
to 416 × 416 × 3.We trained the CRNN with eleven
classes (numbers from 0 to 9, plus white special char-
acter). Thus, we trained the model with our dataset
(2179 Algerian license plates) to mini-batches (32 li-
cense plates per batch), where the input image are
sized to 128 × 64 × 1. We used an Adam optimizer
and a learning rate parameter fixed to lr = 0.001 dur-
ing the training step.
5 DATASET
We collected a set of image and video data that
we captured in the municipality of Draria in Alge-
ria using a fixed camera. Then we increased our
dataset by public images from websites that can be
accessed on the Internet (such as ”google images”
1
,
”facebook marketplace”
2
and “Ouedkniss”
3
). We
have published our dataset on the GitHub reposi-
tory (LPA Dataset, 2019).The vehicle objects of our
dataset exhibit a wide variability of viewpoints and
lighting. Thus, we have built up a learning set of 2408
images, and a test set of 1000 images used to train and
test YOLO detector. Figure 3 presents some samples.
For the license plates recognition, we collect
the plates extracted during the detection step on our
dataset. The latter contains a learning set of 1, 775
plates, and a test set of 404 plates. They were care-
fully and manually annotated with license plate char-
1
https://www.google.com/imghp
2
https://www.facebook.com/
3
https://www.ouedkniss.com/
An ALPR System-based Deep Networks for the Detection and Recognition
207
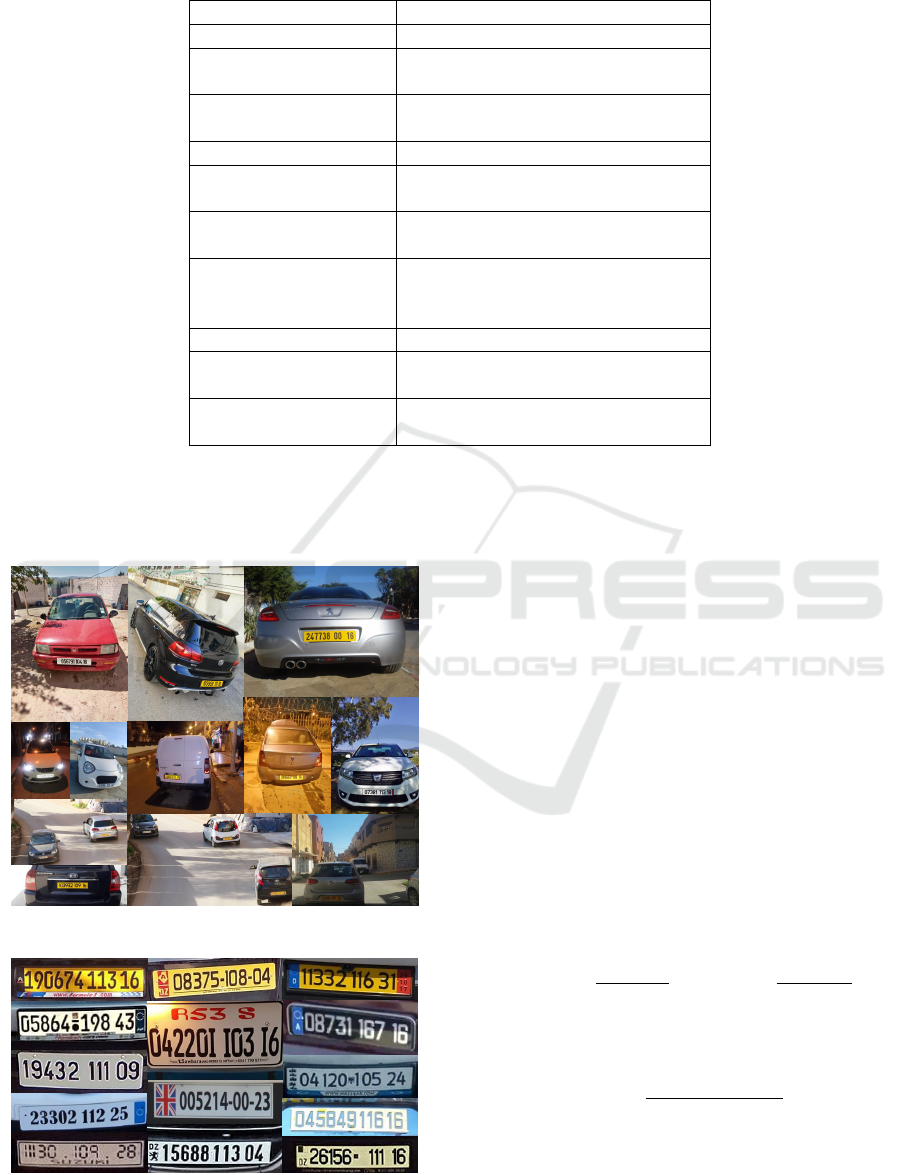
Table 1: The configuration of our CRNN.
Example Type of layer Parameters
Entry Grey-level image with size 128 × 64
Convolution filters: 64, kernel: 3 × 3, s: 1, p: 1
Max pooling kernel: 2 × 2, s: 2
Convolution filters: 128, kernel: 3 × 3, s: 1, p: 1
Max pooling kernel: 2 × 2, s: 2
Convolution filters: 256, kernel: 3 × 3, s: 1, p: 1
Convolution filters: 256, kernel: 3 × 3, s: 1, p: 1
Max pooling kernel: 1 × 2, s: 2
Convolution filters: 512, kernel: 3 × 3, s: 1, p: 1
Batch normalization
Convolution filters: 512, kernel: 3 × 3, s: 1, p: 1
Batch normalization
Max pooling kernel: 1 × 2, s: 2
Convolution filters: 512, kernel: 2 × 2, s: 1, p: 1
BGRU units: 512
BGRU units: 512
Fully Connected units: 11
Softmax classes: 11
acters to allow an accurate assessment of optical char-
acter recognition. Some samples shown in Figure 4.
Figure 3: Image samples used to train the YOLO detector.
Figure 4: Samples of license plates used to train the CRNN.
6 EXPERIMENT AND RESULTS
In this section, we first describe a set of measures
commonly used for evaluating deep learning-based
systems. Then, we present our configurations and the
experimental considerations that we have imposed by
setting the benchmarks and parameters that have al-
lowed us to achieve satisfactory performance and high
rates of detection and recognition of Algerian license
plates.
6.1 Popular Metrics
First we denote by T P, FP, T N, FN respectively
true-positive, false-positive, true-negative and false-
negative.
Precision/Recall. It is a matter of using accuracy or
error rate for the detection of objects. These measures
are summarized in the following equations (2):
Precision =
T P
T P + FP
, Recall =
T P
T P + FN
(2)
IoU: Intersection over Union measures the overlap
between two borders. It is given as equation (3):
IoU =
Area o f Overlap
Area o f Union
(3)
WER/CER. The performance of character recogni-
tion models can be measured by word error rate
(WER) and character error rate (CER). WER is the
report of reading errors calculated at the word level.
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
208
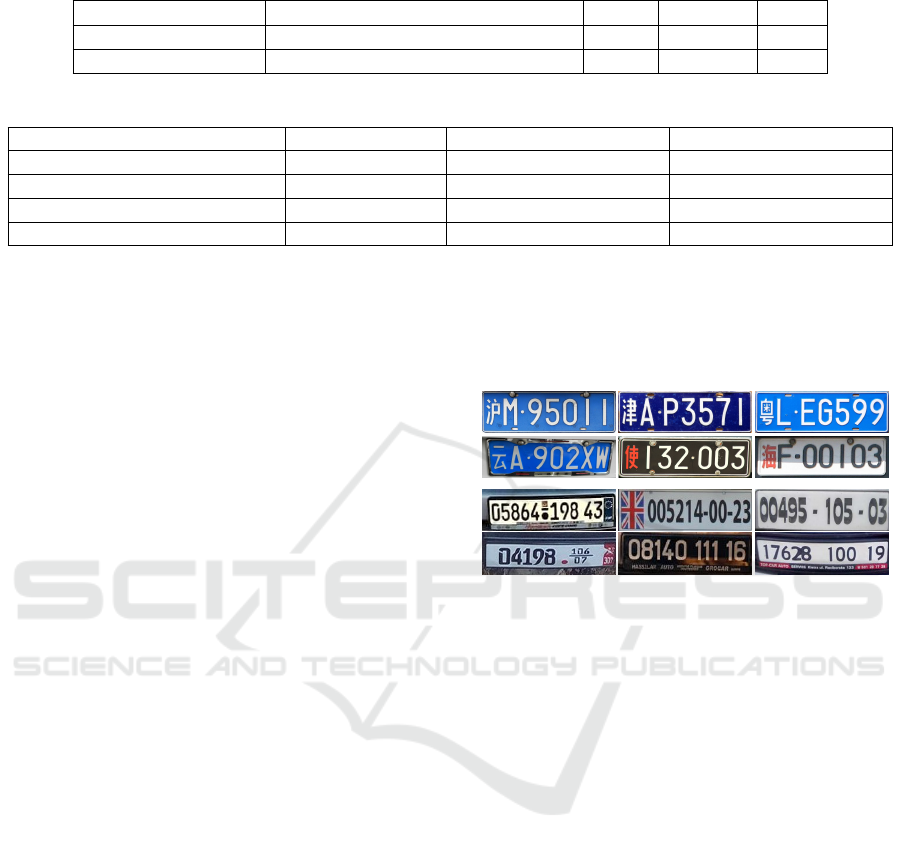
Table 2: Comparison of the performance of YOLOv3 and MobileNet-YOLOv3.
Detection model Average detection speed (sec/Image) Recall Precision AP
50
YOLOv3 0.050 0.970 0.990 0.969
MobileNet-YOLOv3 0.032 0.960 0.980 0.954
Table 3: Comparison of the performance of CRNN, Wu-DenseNet, and our model.
Recognition Model Input Image Size WAR(%) CER(%)
CRNN (Shi et al., 2016) 128 × 32 × 1 train: 0.06, test: 15.63 train: 0.01, test: 2.46
Wu-DenseNet (Wu et al., 2018) 136 × 36 × 1 train: 0.06, test: 28.29 train: 0.01, test: 4.33
Our Model(BLSTM) 128 × 64 × 1 train: 0.06, test: 9.18 train: 0.01, test: 1.08
Our Model(BGRU) 128 × 64 × 1 train: 0.06, test: 7.94 train: 0.01, test: 0.99
The CER measures the distance of Levenshtein stan-
dardized by the length of the word ground-truth.
6.2 Experiment Setups
We implemented our approach using both Keras and
Tensorflow libraries with Adam optimization. The
training and test run using a PC with Intel Core Xeon
CPU and 16 GB GPU (NVIDIA Tesla P100-PCIE).
6.3 Results
Table 2 shows the results obtained by the two mod-
els, tested on our dataset (LPA Dataset, 2019), af-
ter 22,123 training steps. Compared to YOLOv3,
MobileNet-YOLOv3’s detection speed is faster, and it
always meets real-time requirements. While in terms
of Average Precision (AP) performance (Everingham
et al., 2010), YOLOv3 is better than MobileNet-
YOLOv3, which means that the license plates de-
tected by YOLOv3 are closer to the ground truth.
The evaluation criterion for recognition is the ac-
curacy of the license plate, which means that the
recognition is correct when all the characters of a li-
cense plate are correctly recognized. To this purpose
we used two metrics (CER, WAR). Table 3 shows the
results obtained by our model, tested on our dataset
(LPA Dataset, 2019), as well by CRNN (Shi et al.,
2016) and Wu-DenseNet (Wu et al., 2018). All three
models were obtained after 22,188 training steps.
Compared to both models, our model is more effi-
cient for Algerian license plates (CER-0.99%, WAR-
7.94%).
Table 4 shows the results obtained by our model
tested on our dataset (LPA Dataset, 2019) and other
results on the Chinese Dataset-1 that is featured in
Wu-DenseNet (Wu et al., 2018). Chinese Dataset-1
(Wang et al., 2017) contains 203,774 Chinese license
plates for training and 9,986 for testing. Chinese li-
cense plates generally come according to a standard
model and are identical. On the other hand, Algerian
license plates do not have a standard model, causing
the existence of many different models (fonts, colors,
design) of license plates, which has, therefore, accen-
tuates the difficulty to recognize the Algerian license
plates (e.g., Figure 5).
Figure 5: Comparisons between Chinese license plates
(top), and Algerian license plates (bottom).
Figure 6 presents some examples of MobileNet-
YOLOv3 detection and CRNN recognition result.
7 CONCLUSION
In this article, we proposed an end-to-end license
plate recognition system based on the YOLO de-
tector and CRNN. For the detection step, we op-
timized some training parameters of YOLOv3 and
MobileNet-YOLOv3, and then we trained a license
plate detection model on datasets with high and uni-
form intra-class variability of plate patterns.
We carried out comparative experiments of
YOLOv3 and MobileNet-YOLOv3, and the results
show that MobileNet-YOLOv3 works better on de-
tection speed while YOLOv3 works better on detec-
tion accuracy. In the recognition part, we designed
and trained our CRNN model which is an improved
RNN. We also carried out comparative experiments
of our CRNN with other models, and the results
show that our system performs better for Algerian li-
cense plates. Experimental results show that the pro-
posed system has achieved top performance in terms
of recognition speed and recognition accuracy, which
An ALPR System-based Deep Networks for the Detection and Recognition
209

Table 4: Comparison of performance on Chinese Dataset and our Algerian Dataset.
Recognition Model Dataset Input Image Size WAR(%) CER(%)
Wu-DenseNet (Wu et al., 2018)
Chinoises (Wang et al., 2017)
Alg
´
eriennes (LPA Dataset, 2019)
136 × 36 × 1
0.01
28.29
0.001
4.33
Our Model Alg
´
eriennes (LPA Dataset, 2019) 128 × 64 × 1 7.94 0.99
Figure 6: Samples of MobileNet-YOLOv3 detection and CRNN recognition result.
can fully meet the needs of practical applications. As
perspective, we plan to enrich our dataset by explor-
ing a new ways to improve the recognition of Algerian
license plates.
REFERENCES
Andrew G. Howard, Menglong Zhu, B. C. D. K. W. W. T.
W. M. A. H. A. (2017). Mobilenets: Efficient convolu-
tional neural networks for mobile vision applications.
arXiv.
Cheang, T. K., Chong, Y. S., and Tay, Y. H. (2017).
Segmentation-free vehicle license plate recognition
using convnet-rnn. arXiv preprint arXiv:1701.06439.
Cho, K., Van Merri
¨
enboer, B., Gulcehre, C., Bahdanau, D.,
Bougares, F., Schwenk, H., and Bengio, Y. (2014).
Learning phrase representations using rnn encoder-
decoder for statistical machine translation. arXiv
preprint arXiv:1406.1078.
Chung, J., Gulcehre, C., Cho, K., and Bengio, Y.
(2014). Empirical evaluation of gated recurrent neu-
ral networks on sequence modeling. arXiv preprint
arXiv:1412.3555.
Du, S., Ibrahim, M., Shehata, M., and Badawy, W. (2012).
Automatic license plate recognition (alpr): A state-
of-the-art review. IEEE Transactions on circuits and
systems for video technology, 23(2):311–325.
Everingham, M., Van Gool, L., Williams, C. K., Winn, J.,
and Zisserman, A. (2010). The pascal visual object
classes (voc) challenge. International journal of com-
puter vision, 88(2):303–338.
Fu, R., Zhang, Z., and Li, L. (2016). Using lstm and gru
neural network methods for traffic flow prediction. In
2016 31st Youth Academic Annual Conference of Chi-
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
210

nese Association of Automation (YAC), pages 324–
328. IEEE.
Graves, A., Fern
´
andez, S., Gomez, F., and Schmidhu-
ber, J. (2006). Connectionist temporal classification:
labelling unsegmented sequence data with recurrent
neural networks. In Proceedings of the 23rd interna-
tional conference on Machine learning, pages 369–
376.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural computation, 9(8):1735–1780.
Hsu, G.-S., Ambikapathi, A., Chung, S.-L., and Su, C.-P.
(2017). Robust license plate detection in the wild.
In 2017 14th IEEE International Conference on Ad-
vanced Video and Signal Based Surveillance (AVSS),
pages 1–6. IEEE.
Huang, G., Liu, Z., Van Der Maaten, L., and Weinberger,
K. Q. (2017). Densely connected convolutional net-
works. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 4700–
4708.
Khan, M. A., Sharif, M., Javed, M. Y., Akram, T., Yas-
min, M., and Saba, T. (2017). License number plate
recognition system using entropy-based features se-
lection approach with svm. IET Image Processing,
12(2):200–209.
Laroca, R., Severo, E., Zanlorensi, L. A., Oliveira, L. S.,
Gonc¸alves, G. R., Schwartz, W. R., and Menotti, D.
(2018). A robust real-time automatic license plate
recognition based on the yolo detector. In 2018
International Joint Conference on Neural Networks
(IJCNN), pages 1–10. IEEE.
Li, H. and Shen, C. (2016). Reading car license plates using
deep convolutional neural networks and lstms. arXiv
preprint arXiv:1601.05610.
Li, H., Wang, P., You, M., and Shen, C. (2018). Reading car
license plates using deep neural networks. Image and
Vision Computing, 72:14–23.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Euro-
pean conference on computer vision, pages 740–755.
Springer.
Liu, G., Ma, Z., Du, Z., and Wen, C. (2011). The calcula-
tion method of road travel time based on license plate
recognition technology. In Advances in information
technology and education, pages 385–389. Springer.
LPA Dataset, L. P. o. A. D. (2019). License Plates of Alge-
ria Dataset. https://github.com/mouad12345/License
Plates of Algeria Dataset.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time object
detection. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 779–
788.
Redmon, J. and Farhadi, A. (2017). Yolo9000: better, faster,
stronger. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 7263–
7271.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. arXiv preprint arXiv:1804.02767.
Selmi, Z., Halima, M. B., and Alimi, A. M. (2017). Deep
learning system for automatic license plate detection
and recognition. In 2017 14th IAPR international
conference on document analysis and recognition (IC-
DAR), volume 1, pages 1132–1138. IEEE.
Shi, B., Bai, X., and Yao, C. (2016). An end-to-end train-
able neural network for image-based sequence recog-
nition and its application to scene text recognition.
IEEE transactions on pattern analysis and machine
intelligence, 39(11):2298–2304.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
ˇ
Spa
ˇ
nhel, J., Sochor, J., Jur
´
anek, R., Herout, A., Mar
ˇ
s
´
ık,
L., and Zem
ˇ
c
´
ık, P. (2017). Holistic recognition of
low quality license plates by cnn using track anno-
tated data. In 2017 14th IEEE International Confer-
ence on Advanced Video and Signal Based Surveil-
lance (AVSS), pages 1–6. IEEE.
Wang, X., Man, Z., You, M., and Shen, C. (2017). Adver-
sarial generation of training examples: applications
to moving vehicle license plate recognition. arXiv
preprint arXiv:1707.03124.
Williams, R. J. and Zipser, D. (1995). Gradient-based learn-
ing algorithms for recurrent. Backpropagation: The-
ory, architectures, and applications, 433.
Wu, C., Xu, S., Song, G., and Zhang, S. (2018). How many
labeled license plates are needed? In Chinese Con-
ference on Pattern Recognition and Computer Vision
(PRCV), pages 334–346. Springer.
Xie, L., Ahmad, T., Jin, L., Liu, Y., and Zhang, S. (2018).
A new cnn-based method for multi-directional car li-
cense plate detection. IEEE Transactions on Intelli-
gent Transportation Systems, 19(2):507–517.
Yang, A. (2018 (accessed February 29, 2019)). A Keras im-
plementation of Yolov3. https://github.com/Adamdad/
keras-YOLOv3-mobilenet.
An ALPR System-based Deep Networks for the Detection and Recognition
211
