
An Investigation Into the Effect of the Learning Rate on Overestimation
Bias of Connectionist Q-learning
Yifei Chen
a
, Lambert Schomaker
b
and Marco Wiering
c
Bernoulli Institute for Mathematics, Computer Science and Artificial Intelligence, University of Groningen,
9747 AG Groningen, The Netherlands
Keywords:
Reinforcement Learning, Q-learning, Function Approximation, Overestimation Bias.
Abstract:
In Reinforcement learning, Q-learning is the best-known algorithm but it suffers from overestimation bias,
which may lead to poor performance or unstable learning. In this paper, we present a novel analysis of this
problem using various control tasks. For solving these tasks, Q-learning is combined with a multilayer percep-
tron (MLP), experience replay, and a target network. We focus our analysis on the effect of the learning rate
when training the MLP. Furthermore, we examine if decaying the learning rate over time has advantages over
static ones. Experiments have been performed using various maze-solving problems involving deterministic
or stochastic transition functions and 2D or 3D grids and two Open-AI gym control problems. We conducted
the same experiments with Double Q-learning using two MLPs with the same parameter settings, but without
target networks. The results on the maze problems show that for Q-learning combined with the MLP, the
overestimation occurs when higher learning rates are used and not when lower learning rates are used. The
Double Q-learning variant becomes much less stable with higher learning rates and with low learning rates
the overestimation bias may still occur. Overall, decaying learning rates clearly improves the performances of
both Q-learning and Double Q-learning.
1 INTRODUCTION
The core idea of Reinforcement learning (RL) is to
let an agent learn to optimize its behavior by inter-
acting with an environment. The goal of the agent
is to maximize its cumulative obtained reward. To
achieve this goal, the agent learns from trial and error
by observing the effects of different actions in differ-
ent states. This process leads to a temporal sequence:
{ s
0
, a
0
, r
1
, s
1
, a
1
, r
2
, ... } of states s
t
, actions a
t
and re-
wards r
t
, which can be used by the agent to optimize
its action-selection policy (Sutton and Barto, 2018).
The process is stopped when the task is completed
or interrupted in another way, which forms a single
episode (note that continuing tasks also exist, but are
less common in RL). Usually many episodes are re-
quired for learning a near-optimal policy, and there-
fore RL algorithms can take a long time to learn good
policies in complex environments.
A well-known and often used RL algorithm is Q-
learning (Watkins and Dayan, 1992). Q-learning is an
a
https://orcid.org/0000-0001-8240-0259
b
https://orcid.org/0000-0003-2351-930X
c
https://orcid.org/0000-0003-4331-7537
off-policy algorithm and uses bootstrapping for up-
dates. Off-policy learning means the agent uses a tar-
get policy π for updating the value function but uses a
different behavior policy π
b
for selecting actions (Sut-
ton and Barto, 2018). In this approach, bootstrap-
ping entails the update of the value of the current
state-action pair is based on other action-value esti-
mates, which are usually biased and contain errors.
For solving problems involving large or continuous
state spaces, Q-learning needs to be combined with
function-approximation methods such as neural net-
works, an approach which has already been used suc-
cessfully in the 1990s (Lin, 1993).
The collected data (state, action, target value) dur-
ing training is non-stationary and non-iid. Therefore,
fitting a (non-linear) function on this data may lead
to unstable learning and bad performances. The cur-
rent methodology to deal with this issue is to use
experience replay and a target network (Mnih et al.,
2015), which helps to improve stability, but which
does not solve all problems. One problem that re-
mains is that Q-learning tends to overestimate state-
action values, referred to as the overestimation bias
(Thrun and Schwartz, 1993; Van Hasselt, 2010). Sut-
ton and Barto defined the combination of off-policy
Chen, Y., Schomaker, L. and Wiering, M.
An Investigation Into the Effect of the Learning Rate on Overestimation Bias of Connectionist Q-learning.
DOI: 10.5220/0010227301070118
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 2, pages 107-118
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
107

RL, bootstrapping and function approximation as ’the
deadly triad’ (Sutton and Barto, 2018) and several
studies have shown that such algorithms can diverge
(Boyan and Moore, 1994; Wiering, 2004). These
problems sometimes make the application of RL to
solve challenging control tasks very hard.
The problem of overestimation bias in Q-learning
has drawn attention from researchers in RL for many
years. Thrun and Schwartz pointed out that the over-
estimation bias is the major source of failure when
function approximators are combined with Q-learning
(Thrun and Schwartz, 1993). They proved that this
combination could cause a systematic overestimation
of utility values because of the approximation error
and mentioned that this could be resolved by biasing
the function approximator to learn lower predictions.
Later in (Van Hasselt, 2010), van Hasselt showed
that overestimation is quite general in the application
of Q-learning and also occurs when lookup tables are
used to store the state-action value function. To tackle
this problem, van Hasselt proposed an off-policy al-
gorithm called Double Q-learning which does not suf-
fer from overestimation, but which can suffer from
underestimation (Van Hasselt, 2010). Later, van Has-
selt extended the idea of Double Q-learning to us-
ing deep neural networks and constructed an algo-
rithm called Double DQN, which successfully learned
better policies than DQN on different Atari games
(Van Hasselt et al., 2016).
A problem of Double Q-learning is that it does not
solve all problems concerning learning an accurate
state-action value function with function approxima-
tion, because the overestimation problem is replaced
by an underestimation problem. In (D’Eramo et al.,
2016), the authors proposed the Weighted Estimator
to generate more accurate estimations by computing
the weighted averages of the sample means. In (Lu
et al., 2018), the authors identified another problem
of approximate Q-learning, termed delusional bias.
This delusional bias occurs when value-function up-
dates are generated which are inconsistent with each
other and cannot be jointly realized. To handle this
problem, the authors propose to use information sets,
which are possible function approximator parameter
settings that can justify the updates. These two algo-
rithms are however complex and require much more
computation than regular Q-learning.
Contributions. In this paper we study the over-
estimation bias of Q-learning combined with multi-
layer perceptrons (MLPs) when this QMLP technique
is used to solve different maze-navigation problems
and some other control tasks. QMLP uses experience
replay and a target network and uses the Adam op-
timizer (Kingma and Ba, 2014) to train the MLP on
mini-batches with experiences. We especially exam-
ine the effects of different learning rates on the result-
ing overestimation bias and final performance. We
also propose the use of decaying the learning rate in-
stead of using a static learning rate as commonly used
in connectionist RL. Furthermore, we implemented a
Double Q-learning algorithm in which two MLPs are
used to learn two different state-action value functions
similar to the original Double Q-learning algorithm
(Van Hasselt, 2010). For this DQMLP method no tar-
get networks are used.
We created four tasks consisting of 2D or 3D maze
environments and deterministic or stochastic transi-
tion functions. Besides, two classic control prob-
lems from the Open-AI gym environments were used
to further examine the effect of learning rates on
the overestimation bias and performance. The re-
sults showed that when lower learning rates are used
for QMLP, no significant overestimation bias occurs.
However, with higher learning rates, the overestima-
tion bias does occur with QMLP. By using a decay-
ing learning rate, the overestimation bias can be sub-
dued and the value estimation can be improved. When
Double Q-learning is combined with MLPs, the re-
sulting DQMLP algorithm sometimes still leads to an
overestimation bias when very low learning rates are
used and becomes less stable when higher learning
rates are used. Again, the value estimation can be im-
proved by using a decaying learning rate. The results
show that higher learning rates lead to worse final per-
formances for both algorithms on the maze problems,
although low learning rates lead to lower average per-
formance during a whole simulation, which is caused
by the initial slow learning behavior. Finally, the re-
sults demonstrate that in almost all experiments the
use of a decaying learning rate can considerably im-
prove the final and average performances.
Paper Outline. In Section 2, the used RL algo-
rithms and the learning rate decay technique are de-
scribed. Section 3 explains the experimental setup.
In Section 4, the experimental results are presented
and discussed. Section 5 concludes the paper and de-
scribes some directions for future work.
2 REINFORCEMENT LEARNING
In order to formalize most RL problems, the Markov
decision process (MDP) framework can be used
(Howard, 1960). A finite stationary MDP is a tuple
< S, A, R, P, γ >, where:
• S represents the set of possible states in the envi-
ronment and s
t
denotes the state at time step t.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
108

• A is the set of valid actions the agent can take and
a
t
denotes the selected action at time step t.
• R(s, a, s
0
) is the reward function which emits a re-
ward r
t+1
after the agent took action a in state s
and moved to state s
0
.
• P(s, a, s
0
) is the state transition probability func-
tion and gives the probability of transitioning to
state s
0
if the agent takes action a in state s.
• γ is a discount factor, 0 ≤ γ ≤ 1, and determines
the importance of rewards obtained in the future
compared to immediate rewards.
The goal of an agent is to learn the optimal policy to
obtain the highest possible cumulative discounted re-
ward. In many RL algorithms, the agent uses value
functions that estimate the goodness of states or state-
action pairs. The value of a state, v
π
(s), denotes the
expected discounted cumulative reward that an agent
obtains when starting from state s and following pol-
icy π:
v
π
(s) = E[
∞
∑
k=0
γ
k
r
t+k+1
|s
t
= s] (1)
Where the expectancy operator is used to average over
stochastic transitions and possibly over a stochastic
policy and a stochastic reward function. Similarly, the
state-action values q
π
(s, a) are defined by:
q
π
(s, a) = E[
∞
∑
k=0
γ
k
r
t+k+1
|s
t
= s, a
t
= a] (2)
An optimal policy π
∗
is associated to the optimal Q-
function q
∗
(s, a), which is the maximum Q-function
over all policies. When the agent correctly estimated
q
∗
(s, a), it can select optimal actions using π
∗
(s) =
argmax
a
q
∗
(s, a).
2.1 Q-learning with a Multilayer
Perceptron
Q-learning (Watkins, 1989; Watkins and Dayan,
1992) is the most often used algorithm for value-
function based RL and can learn the optimal policy
for finite MDPs even when actions are always taken
completely randomly. This is because of its off-policy
nature and this makes it also suitable for learning
policies from expert demonstrations or for simulta-
neously learning multiple policies that solve different
tasks. Given an experience tuple (s
t
, a
t
, r
t+1
, s
t+1
), Q-
learning updates the Q-value Q(s
t
, a
t
) according to:
Q(s
t
, a
t
) :=Q(s
t
, a
t
)+
η(r
t+1
+ γmax
a
0
Q(s
t+1
, a
0
) − Q(s
t
, a
t
))
(3)
where η denotes the learning rate. As the agent ex-
plores the effects of different actions in the environ-
ment, the Q-function is continuously updated. When
lookup tables are used to store the Q-function, Q-
learning with a proper learning rate annealing sched-
ule will converge after all actions have been tried an
infinite number of times in all states (Jaakkola et al.,
1994; Tsitsiklis, 1994)
Although the most straightforward way of ap-
plying Q-learning is using a look-up table to store
the Q-values of all state-action pairs, this is infeasi-
ble if the state-action space is very large or continu-
ous. Furthermore, a tabular representation does not
have generalization power, which makes it impossi-
ble for the agent to select an informed action in a
state that has not been visited before. Therefore, us-
ing function approximation is necessary when using
Q-learning for solving complex sequential decision-
making problems. The most often used function
approximation techniques in RL are different kinds
of neural networks. In 1993, Lin combined multi-
layer perceptrons with Q-learning for several chal-
lenging navigation tasks (Lin, 1993), for which he
also proposed the currently popular experience replay
method. Tesauro also used an MLP when training a
backgammon playing program that used self-play and
temporal-difference learning (Tesauro, 1994). The
resulting TD-Gammon program reached a human-
expert level playing performance and was one of the
first successes of RL.
More recently, approximating Q-functions by us-
ing convolutional neural networks (CNNs) has been
shown to work very well for solving problems in-
volving huge state spaces. In (Mnih et al., 2013;
Mnih et al., 2015), the authors proposed a novel RL
method, the deep Q-network (DQN), that combines
Q-learning, a CNN, experience replay and a separate
target Q-network. This DQN agent achieved state-of-
the-art performances on 43 Atari games by only us-
ing images containing raw pixel values as input. This
led to the active research field of deep reinforcement
learning (DRL), in which deep neural networks are
combined with RL algorithms.
When training neural networks with RL algo-
rithms, an objective or loss function can be specified.
When Q-learning and a target network are used, the
loss function is:
L
θ
= E[(r
t+1
+ γmax
a
Q(s
t+1
, a;θ
−
) − Q(s
t
, a
t
;θ))
2
]
(4)
where θ consists of all trainable parameters of the cur-
rent Q-network, and θ
−
represents the parameters of
the target Q-network which is a backup version of a
previous Q-network. The expectancy operator is used
An Investigation Into the Effect of the Learning Rate on Overestimation Bias of Connectionist Q-learning
109

because training occurs using stochastic sampling of
mini-batches with experiences.
In this paper, we also use this objective function
but instead of a CNN, we use a multilayer percep-
tron and train it with Q-learning. We will call this
approach QMLP and similar to DQN, experience re-
play is used so that the collected experiences can be
used multiple times for training the MLP (Lin, 1993).
Furthermore, a separate target Q-network which is up-
dated periodically is used, which is considered state-
of-the-art practice in DRL to make the method more
stable.
2.2 Double Q-learning with Two
Multilayer Perceptrons
As described in the introduction, Q-learning can suf-
fer from overestimation errors when learning the Q-
function. Furthermore, the combination of off-policy
RL, bootstrapping and function approximation form
the deadly triad (Sutton and Barto, 2018), which can
lead to poor learning performances (Van Hasselt et al.,
2018). There have been different attempts to alleviate
the overestimation bias in Q-learning. In (Van Has-
selt, 2010), van Hasselt proposed an off-policy algo-
rithm, Double Q-learning, which uses a double esti-
mator approach for updating Q-values. Let Q
A
and
Q
B
denote the two estimators, then for selecting an
action one of them is selected randomly or the av-
erage action value of both Q-functions can be used.
Then, one Q-function (e.g. Q
A
) is randomly selected
to be updated using:
Q
A
(s
t
, a
t
) :=Q
A
(s
t
, a
t
)+
η(r
t+1
+ γQ
B
(s
t+1
, a
?
) − Q
A
(s
t
, a
t
))
(5)
where a
?
= argmax
a
Q
A
(s
t+1
, a) denotes the optimal
action to take in the next state according to function
Q
A
. The updating rule for Q
B
is the same with Q
A
and
Q
B
swapped.
Subsequently, Double DQN was developed by
adapting the DQN algorithm with respect to the idea
of Double Q-learning (Van Hasselt et al., 2016). The
update for the Q-network of Double DQN is similar
to the one of DQN, except for the target value of an
update:
y
DDQN
t
≡ r
t+1
+ γQ(s
t+1
, argmax
a
Q(s
t+1
, a;θ
t
), θ
−
t
)
(6)
where θ and θ
−
are again the parameters of the Q-
network and the target Q-network. The basic differ-
ence is that the Q-network is used to compute the best
action in the next state instead of letting the target Q-
network determine this best action. It should be noted
that this update is somewhat different from the orig-
inal Double Q-learning algorithm, because only one
network is used for selecting actions and updated on
the experiences.
In our experiments, we developed a DQMLP al-
gorithm that is more similar to the original Double
Q-learning algorithm, which has also been proposed
in (Schilperoort et al., 2018). Our DQMLP algorithm
uses two MLPs to approximate the two estimators of
the Double Q-learning algorithm. For selecting an ac-
tion, the average Q-value of both MLPs is used. For
each training step, one MLP is randomly picked to be
updated, and the other MLP is used to compute the
target value. The loss function for updating the Q
A
network is:
L
θ
A
= E[(r
t+1
+ γQ
B
(s
t+1
, a
∗
;θ
B
) − Q
A
(s
t
, a
t
;θ
A
))
2
]
(7)
where θ
A
and θ
B
represent the parameters of the two
MLPs. The action a
∗
is again determined using net-
work Q
A
. The update for the Q
B
network is again the
same with indices swapped.
2.3 Learning Rate Decay
Learning rate decay is a commonly used technique in
deep learning because of its simplicity and effective-
ness (You et al., 2019). In the beginning of training,
a reasonably high learning rate is important to learn
fast, but once a good approximation has been learned,
using a low learning rate helps with fine-tuning the
model. It has been shown that when using stochastic
gradient descent with mini-batches of training data,
annealing the learning rate is necessary for the model
to converge.
In RL, almost all researches use fixed learning
rates and the effect of learning rate decay has hardly
been studied. In (Van Hasselt, 2010), the author used
a linear learning rate and a polynomial learning rate
decay in the experiments, but the effect of using de-
caying learning rates compared to fixed learning rates
was not researched. The relationship between learn-
ing rates and convergence rates in the Q-learning al-
gorithm was explored in (Even-Dar and Mansour,
2003), but the algorithm studied was not combined
with function approximators.
Therefore, besides the impact of learning rates on
the overestimation bias, this paper investigates the ef-
fect of learning rate decay on the value estimation and
performances of approximate RL algorithms.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
110

3 EXPERIMENTAL SETUP
The experiments were performed in different maze
environments and two Open-AI gym environments:
CartPole-v0 and Acrobot-v1. In this section, we will
first describe details of the maze environments. Then
the structure of the MLPs is presented together with
the used hyper-parameters. At the end of this section
we explain how we measured the performances of the
RL algorithms.
3.1 Maze Environments
To investigate when the overestimation occurs in the
QMLP and DQMLP algorithms, an empty 2D maze
and an empty 3D maze were constructed as illustrated
in Figure 1. In each episode of the 2D maze, the agent
starts from the upper left corner (green cell) and has to
navigate to the lower right corner (red cell). The 2D
maze consists of 100 states and four actions: north,
south, west, and east. Similarly, in every episode of
the 3D maze, the agent starts in the green cell and
needs to find the red cell. The 3D maze consists of
1000 states and there are six actions: up, down, north,
south, west, and east.
(a) 2D maze (b) 3D maze
Figure 1: Illustration of the 2D and 3D environments. The
following states can be viewed: the starting state (green),
the terminal state (red), and other states (white). Note that
there is a wall around each entire maze, which is not shown
in the figures.
State Transition Functions. Two types of state
transition functions were created for both mazes: (1)
deterministic transition functions, and (2) stochastic
transition functions. Therefore, four kinds of envi-
ronments were constructed in total: a deterministic
2D maze, a stochastic 2D maze, a deterministic 3D
maze, and a stochastic 3D maze. In the maze with
a deterministic transition function, the agent executes
the selected action deterministically. For the stochas-
tic transition function, the agent has a 20% chance of
randomly moving to one of the neighboring states in-
stead of executing the selected action.
Reward Function. The reward function is kept
the same for all maze environments. The agent gets a
reward of −5 for hitting the borders of the maze and
+20 for reaching the terminal goal state. For every
other step, a punishment of −1 is given to encourage
the agent to find the exit using the least number of
steps. The optimal cumulative reward intake in one
episode is +3 for the deterministic 2D maze, and −6
for the deterministic 3D maze. Note that the optimal
Q-value of the best action in the starting state (which
we will also analyse) is different for these environ-
ments due to the discount factor.
3.2 Structure of Multilayer Perceptrons
and Used Hyper-parameters
3.2.1 Maze Environments
In the maze-navigation problems, the MLPs in QMLP
and DQMLP are implemented with the same struc-
ture, but DQMLP uses two MLPs. Each MLP is com-
posed of an input layer, a single hidden layer, and an
output layer.
Input Layer. The input of the MLP uses a con-
tinuous representation of the state of the agent. The
current coordinates of the agent are normalized to val-
ues between 0 and 1. Therefore, the input layer of the
2D maze is composed of 2 nodes, which represent the
row and column index of the agent. The starting state
of the 2D maze is represented as [0.0, 0.0], and the
terminal state is [1.0, 1.0]. Likewise, three inputs are
used for the 3D maze.
Hidden Layer. The number of hidden units is
2048, which was enough to reliably learn to solve
the tasks in preliminary experiments. As activation
function, the hidden units use the rectified linear unit
(ReLU) function (Glorot et al., 2011).
Output Layer. The outputs of the MLP represent
the Q-values of the actions. Therefore, the number of
output units is the same as the number of actions (4 or
6). A linear activation function is used in the output
layer.
Other Hyper-parameters. The QMLP and
DQMLP agent are both trained using the Adam op-
timizer (Kingma and Ba, 2014). We use the standard
values β
1
= 0.9 and β
2
= 0.999 and varied the values
of the learning rate. All other parameters were tuned
using preliminary experiments. The epsilon-greedy
policy is used as exploration strategy. For each sim-
ulation, each agent is trained for 5,000 episodes with
the value of epsilon decaying linearly from 1.0 to 0.0
in the first 4,000 episodes and staying at 0.0 in the last
1,000 episodes. The maximum number of steps in one
episode is set to 2,000. The discount factor is 0.95. In
every updating step, a batch size of 128 experiences
is sampled from the experience replay buffer for the
agent to learn from. The capacity of the experience
replay memory is 20,000. The best results were ob-
An Investigation Into the Effect of the Learning Rate on Overestimation Bias of Connectionist Q-learning
111

tained by copying the current Q-network to the target
network after each step and therefore this means that
essentially no target network is used for QMLP.
3.2.2 Open-AI Gym Environments
For solving the Open-AI gym problems, the hyper-
parameters were slightly re-tuned. Both QMLP and
DQMLP agents are trained for 500 episodes. The
epsilon value decreases linearly from 1.0 to 0.0 in
the first 400 episodes and stays 0.0 for the remain-
ing episodes. For both agents, the MLP used two
hidden layers, the first with 48 and the second with
96 hidden units. The capacity of the memory buffer
is 1,000,000. The batch size is 512 for both algo-
rithms. The target network of QMLP is updated ev-
ery 64 steps. The other hyper-parameters are kept the
same as for the maze-solving agents.
3.3 Performance Measures
In the results, we report three different performance
measures. First, the cumulative reward intake dur-
ing the last episode is recorded for each simulation.
Second, the average cumulative reward per episode
during an entire simulation is computed. Third, to an-
alyze possible overestimation or underestimation er-
rors, we record the estimated maximal Q-value of the
starting state. Because the Q-values of the initial state
can change during the entire episode due to the use
of experience replay after each time step, the average
initial state value is computed for each episode. Equa-
tion (8) shows the computation of the initial state-
value estimate per episode.
V
start
=
1
T
T
∑
t=1
max
a
Q(S
start
, a;θ) (8)
Where T denotes the number of steps in an episode
(T ≤ 2000 for maze-navigation problems), and θ rep-
resents the weight values of the Q-network. For
DQMLP, two Q-functions are learned and we selected
the highest Q-value for the initial state from both Q-
functions to compute the initial state value. The true
maximum state-action value of the starting state in
each maze environment was calculated by using dy-
namic programming (Bellman, 1957).
4 EXPERIMENTAL RESULTS
The results are obtained by running 10 simulations
with different random seeds. For each episode, the
initial state value estimate V
start
and the cumulative re-
ward sum R are recorded. In each figure for the value
estimates in the following subsections, the straight
red line represents the true optimal value of the start-
ing state in each corresponding environment. Each
curve shows the average result of the 10 runs, and the
shaded regions show the standard deviation. Some
parts of the figures were zoomed in for clarity.
In 2D mazes, The learning curves of using the
learning rates: 5e − 3, 1e − 3, 1e − 4, 1e − 5, 1e − 6,
and a decaying learning rate are plotted. While in 3D
mazes and the Open-AI gym control environments,
the learning rates 1e − 3, 1e − 4, 1e − 5, 1e − 6, and
a decaying learning rate are used. Specifically, the
decaying learning rate is set as 10
x
with x linearly an-
nealing from -3 to -6 over all the episodes. The setting
of the decaying learning rate is kept the same in the
following experiments.
4.1 Results on Maze Environments
4.1.1 Deterministic 2D Maze
The first row in Figure 2 shows the estimated initial
state value and the cumulative reward per episode of
the QMLP agent in the deterministic 2D maze. We
can see from Figure 2a that overestimation occurred
with the learning rates 5e − 3 and 1e − 3. The cor-
responding cumulative reward curves became unsta-
ble after around 4300 episodes as shown in Figure 2b.
The agent performed best with the decaying learning
rate: the corresponding cumulative rewards smoothly
converged and the average reward intake was highest.
When we examine the results for DQMLP in Fig-
ure 2c, we can observe that the initial state-value es-
timate curves become unstable for the learning rates
5e − 3 and 1e − 3, and their corresponding cumula-
tive rewards were also deteriorating as shown in Fig-
ure 2d. The agent had a stable learning behavior and
achieved the optimal cumulative rewards of +3 with a
learning rate of 1e−4, 1e −5, 1e −6 and the decaying
learning rate. When we zoom in, we can observe that
DQMLP with a learning rate of 1e − 6 surprisingly
starts to overestimate the initial state value in the end.
Table 1 shows the results of both algorithms in the
last episode for the initial state value estimate V and
the cumulative reward R, where σ represents the stan-
dard deviation. The table also shows the average cu-
mulative reward
R over all episodes. The table clearly
shows the overestimation errors for QMLP when high
learning rates are used. The table also shows that
DQMLP always obtains the highest cumulative re-
ward in the last episode, but QMLP learns faster and
obtains higher average rewards over all episodes. De-
caying the learning rate leads to the best performances
for both algorithms: the value function is accurate and
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
112
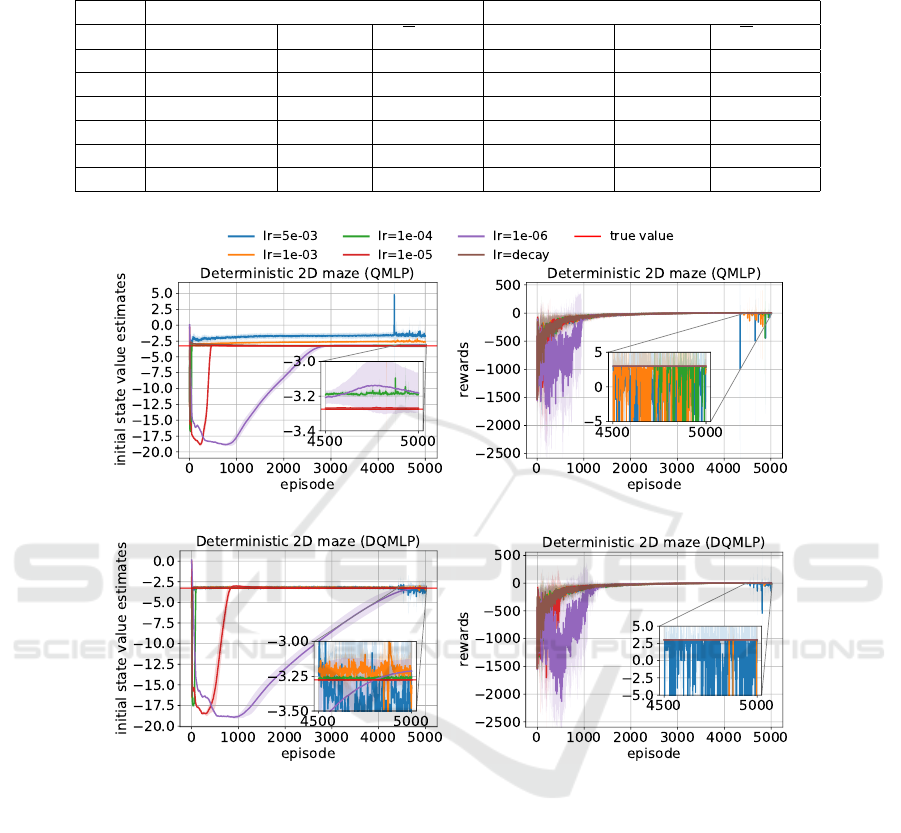
Table 1: Results of QMLP and DQMLP in a deterministic 2D maze. The true value for the initial state is -3.28 and the optimal
cumulative reward is +3.0.
QMLP DQMLP
l.r. V ± σ R ± σ R ± σ V ± σ R ± σ R ± σ
5e-3 −1.71 ± 0.37 2.5 ± 1.5 −57 ± 2 −3.33 ± 0.60 3.0 ± 0.0 −60 ± 1
1e-3 −2.63 ± 0.13 3.0 ± 0.0 −56 ± 1 −3.32 ± 0.33 3.0 ± 0.0 −59 ± 1
1e-4 −3.19 ± 0.01 2.8 ± 0.6 −56 ± 0 −3.26 ± 0.01 3.0 ± 0.0 −59 ± 1
1e-5 −3.27 ± 0.00 3.0 ± 0.0 −67 ± 2 −3.28 ± 0.00 3.0 ± 0.0 −78 ± 8
1e-6 −3.18 ± 0.12 3.0 ± 0.0 −151 ± 20 −3.21 ± 0.09 3.0 ± 0.0 −195 ± 26
decay −3.28 ± 0.00 3.0 ± 0.0 −55 ± 1 −3.28 ± 0.00 3.0 ± 0.0 −58 ± 1
(a) QMLP: V
start
(b) QMLP: Reward Sum
(c) DQMLP: V
start
(d) DQMLP: Reward Sum
Figure 2: Performances of the QMLP agent and the DQMLP agent in a deterministic 2D maze with different learning rates.
Each curve shows the average results of 10 runs. The shaded regions show the standard deviation.
the average reward intake over all episodes is highest.
At the end of training this method is also much more
stable than using static higher learning rates.
4.1.2 Deterministic 3D Maze
The results for the QMLP and DQMLP agent in a de-
terministic 3D maze are shown in Table 2. The table
shows clear overestimation errors for QMLP when the
learning rate is 1e − 3. For DQMLP, significant over-
estimation errors occur for the lowest learning rate.
The use of a decaying learning rate is again very use-
ful for both algorithms: the accuracy of the value
function, the final performance and the average per-
formance are all excellent using the decay function.
We also noticed that using higher learning rates again
led to instabilities in the learning process.
4.1.3 Stochastic 2D Maze
The first row of Figure 3 shows the training results of
the QMLP agent in a stochastic 2D maze. As reported
in Figure 3a, with a learning rate of 5e − 3, 1e − 3
and 1e − 4, the agent significantly overestimated the
value of the starting state. Large standard deviations
(shaded areas) can also be seen in the curve with a
learning rate of 5e − 3. Figure 3b shows that QMLP
with a learning rate of 1e − 5, 1e − 6 and the decaying
An Investigation Into the Effect of the Learning Rate on Overestimation Bias of Connectionist Q-learning
113
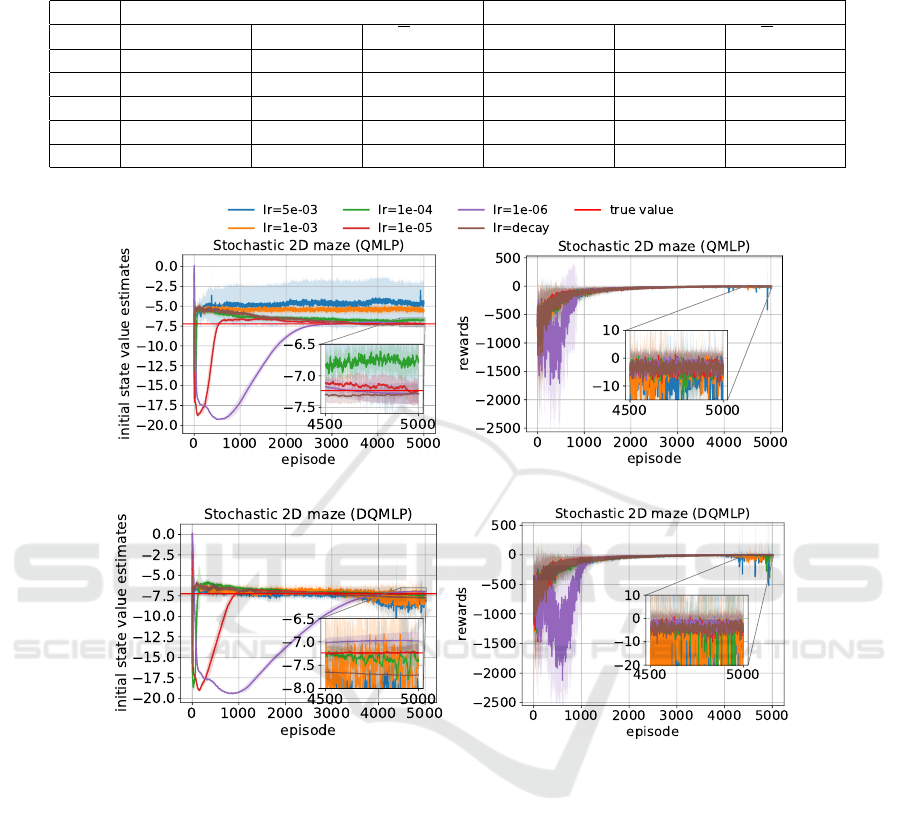
Table 2: Results of QMLP and DQMLP in a deterministic 3D maze. The true value for the initial state is -9.46 and the optimal
cumulative reward is -6.0.
QMLP DQMLP
l.r. V ± σ R ± σ R ± σ V ± σ R ± σ R ± σ
1e-3 −7.39 ± 1.52 −6.4 ± 0.8 −195 ± 80 −9.95 ± 1.73 −6.2 ± 0.6 −171 ± 2
1e-4 −9.18 ± 0.04 −6.0 ± 0.0 −156 ±2 −9.40 ± 0.10 −6.0 ± 0.0 −163 ± 2
1e-5 −9.45 ± 0.00 −6.0 ± 0.0 −170 ± 11 −9.47 ± 0.01 −6.0 ± 0.0 −254 ± 21
1e-6 −9.35 ± 0.07 −6.0 ± 0.0 −734 ± 117 −8.67 ± 0.57 −6.0 ± 0.0 −1151 ± 41
decay −9.44 ± 0.04 −6.0 ± 0.0 −157 ± 4 −9.47 ± 0.01 −6.0 ± 0.0 −117 ± 2
(a) QMLP: V
start
(b) QMLP: Reward Sum
(c) DQMLP: V
start
(d) DQMLP: Reward Sum
Figure 3: Performances of the QMLP and DQMLP agent in a stochastic 2D maze. Each curve shows the average results of
10 runs.
learning rate performed the most stable.
As can be seen from Figure 3c, for DQMLP with
a learning rate of 5e −3, 1e −3 or 1e− 4, the value es-
timate became unstable. Their corresponding cumu-
lative reward curves also became oscillating as shown
in Figure 3d. The agent finally performed best with
a learning rate of 1e − 5, 1e − 6 or a decaying learn-
ing rate. In the end, DQMLP again overestimates the
initial state value with a learning rate of 1e − 6.
The results on the stochastic 2D maze are also
shown in Table 3. The table shows large overestima-
tion errors for QMLP with the highest learning rates.
DQMLP significantly underestimates the initial state
value when a learning rate of 1e − 3 is used and over-
estimates the value with a learning rate of 1e− 6. Due
to the stochasticity of the environment, the cumulative
rewards of the last episode have large standard devi-
ations, but we can observe that the highest learning
rate leads to worse performances for both algorithms.
Decaying the learning rate was again beneficial for
QMLP, but DQMLP had a few bad episodes with it at
the end, which explains the high standard deviation.
4.1.4 Stochastic 3D Maze
The results for the QMLP and DQMLP agent in the
stochastic 3D maze are shown in Table 4. The ta-
ble shows significant overestimation errors for QMLP
with the highest used learning rate. Furthermore, with
all learning rates DQMLP learns to underestimate the
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
114
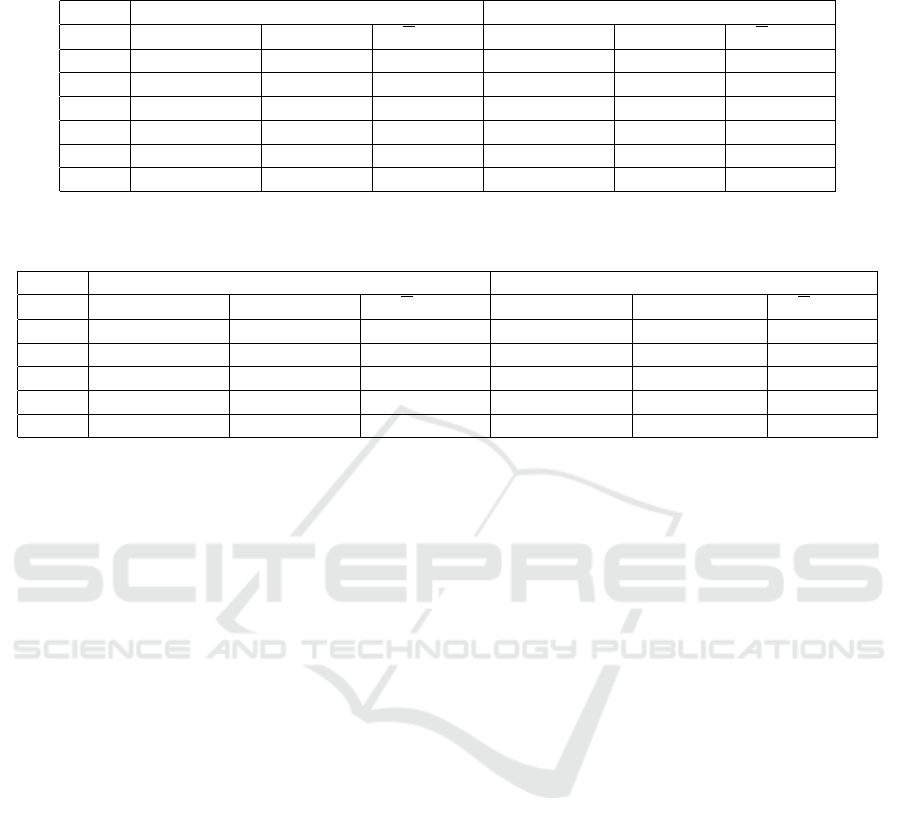
Table 3: Results of QMLP and DQMLP in a stochastic 2D maze. The true value for the initial state is -7.23 and the optimal
cumulative reward is -2.4.
QMLP DQMLP
l.r. V ± σ R ± σ R ± σ V ± σ R ± σ R ± σ
5e-3 −4.60 ± 2.65 −5.7 ± 5.2 −76 ±3 −8.12 ± 1.02 −6.8 ± 6.7 −80 ± 3
1e-3 −5.54 ± 0.46 −2.2 ± 4.4 −74 ±1 −7.34 ± 0.42 −6.1 ± 6.2 −76 ± 1
1e-4 −6.76 ± 0.29 −3.6 ± 5.9 −77 ±2 −7.42 ± 0.35 −2.1 ± 5.0 −78 ± 2
1e-5 −7.24 ± 0.17 −2.8 ± 3.9 −74 ±1 −7.23 ± 0.20 −3.4 ± 6.0 −76 ± 2
1e-6 −7.28 ± 0.19 −2.3 ± 3.9 −142 ± 27 −6.98 ± 0.19 −2.2 ± 5.3 −200 ± 15
decay −7.28 ± 0.15 −2.1 ± 4.3 −74 ± 1 −7.71 ± 0.33 −5.3 ± 7.4 −76 ± 1
Table 4: Results of QMLP and DQMLP in a stochastic 3D maze. The true value for the initial state is -13.36 and the optimal
cumulative reward is -14.2.
QMLP DQMLP
l.r. V ± σ R ± σ R ± σ V ± σ R ± σ R ± σ
1e-3 −9.56 ± 0.48 −20.2 ± 10.5 −208 ± 2 −14.93 ± 1.18 −39.0 ± 60.8 −222 ± 3
1e-4 −13.27 ± 0.26 −18.1 ± 7.0 −381 ± 63 −14.78 ± 0.29 −18.9 ± 8.9 −317 ± 32
1e-5 −15.18 ± 0.83 −20.1 ± 7.5 −276 ± 49 −15.20 ± 0.35 −19.0 ± 8.4 −329 ± 12
1e-6 −15.45 ± 0.96 −20.1 ± 6.0 −1110 ± 280 −18.16 ± 3.44 −119 ± 116.2 −928 ± 77
decay −14.89 ± 0.49 −17.1 ± 5.6 −209 ± 3 −15.54 ± 0.34 −19.9 ± 6.6 −225 ± 2
value of the initial state.
For QMLP, the value estimate converged when the
learning rate is 1e − 4. With a learning rate of 1e − 6,
the standard deviation of the value estimate curve be-
came large and it seems the algorithm needs more
episodes to converge. The best used learning rate is
the decaying learning rate, which leads to the best fi-
nal cumulative reward and average reward.
For DQMLP, the agent with a decaying learning
rate performed best: it obtained the highest average
reward and the final cumulative reward was among
the best. When the learning rate is 1e − 6, the agent
performed the worst. Also with DQMLP, the algo-
rithm needs more episodes to converge with this low
learning rate.
4.2 Results on Open-AI Gym Problems
As we have seen from the previous results, the agent
using a decaying learning rate performed the best in
the experiments with the empty maze environments.
To further examine the effect of annealing the learning
rate, we additionally conducted experiments on two
classic control problems provided by Open-AI Gym:
CartPole-v0 and Acrobot-v1.
4.2.1 Results on CartPole-V0
The CartPole-v0 problem requires the agent to push a
cart left or right in order to keep a pole standing on the
cart from falling, while keeping the cart on the track.
There are four inputs: cart position and velocity and
the pole’s angle and the angular velocity. There are
two actions: push the cart to the left or right. It is a
well-known control problem that has been researched
extensively.
Optimal Values. In the CartPole-v0 environment,
the agent gets a reward of +1 for every step that the
pole does not fall over. The episode terminates when
either the pole angle or the cart position is out of range
or the episode length reaches the maximum of 200
steps. The value of the discount factor γ is 0.95. This
means that the maximal cumulative reward is 200 and
the optimal Q-value is
∑
199
t=0
1 ∗ γ
t
≈ 19.999.
Results. The learning curves are presented in Fig-
ure 4. For this problem, low learning rates do not
lead to good performances. The best performance
for QMLP and DQMLP is obtained with the decay-
ing learning rate. Table 5 shows some more details
about the value estimation and performances of both
algorithms in CartPole. It shows that DQMLP with
the decaying learning rate is always able to obtain
the optimal performance. Note that figure 4(c) shows
that a large overestimation bias occurs in DQMLP,
which was also shown in a similar algorithm (Fuji-
moto et al., 2018). Double DQN, which is a vari-
ant of DQMLP, can also overestimate the true value
(Van Hasselt et al., 2016) in some cases.
4.2.2 Results on Acrobot-V1
The goal of the Acrobot-v1 problem is to swing
up a robot consisting of 2 links and 2 joints. The
problem consists of 6 inputs and there are 3 actions
An Investigation Into the Effect of the Learning Rate on Overestimation Bias of Connectionist Q-learning
115
(a) QMLP: V
start
(b) QMLP: Reward Sum
(c) DQMLP: V
start
(d) DQMLP: Reward Sum
Figure 4: Performances of the QMLP and DQMLP agent in CartPole-v0. Each curve shows the average results of 10 runs.
Table 5: Results of QMLP and DQMLP in the CartPole-v0 environment. The true value for the initial state of CartPole-v0 is
19.999 and the optimal cumulative reward is 200.
QMLP (CartPole-v0) DQMLP (CartPole-v0)
l.r. V ± σ R ± σ R ± σ V ± σ R ± σ R ± σ
1e-3 22.06 ± 0.65 155.6 ± 43.8 81 ± 5 20.30 ± 0.19 168.7 ± 40.2 88 ± 7
1e-4 20.93 ± 0.18 151.9 ± 29.6 107 ± 7 20.52 ± 0.40 160.9 ± 32.5 110 ± 4
1e-5 8.12 ± 1.23 13.3 ± 8.6 14 ± 1 2.55 ± 0.30 9.8 ± 0.6 14 ±1
1e-6 0.38 ± 0.21 11.9 ± 6.5 17 ± 7 0.15 ± 0.04 9.3 ± 0.6 14 ±1
decay 20.69 ± 0.35 190.3 ± 18.7 110 ± 10 21.26 ± 0.32 200.0 ± 0.0 130 ± 3
left/right/do-nothing which is the torque applied on
the second joint.
Optimal Values. For the Acrobot-v1 environ-
ment, there is not a clear optimal cumulative reward,
so we approximate it. The agent gets a punishment of
−1 for every time step until it reaches the goal. The
problem is considered solved when the agent gets an
average reward of -100.0 over 100 consecutive trials.
The value of the discount factor γ is 0.95, and there-
fore we calculated the approximate optimal Q-value
as follows:
∑
99
t=0
−1 ∗ γ
t
≈ −19.882.
Results. Table 6 shows the value estimation and
performances of both algorithms in the Acrobot envi-
ronment. The learning curves are presented in Figure
5. As is shown in the results, QMLP with a decaying
learning rate performed very well. The final perfor-
mance is very good and the average performance is
the best of all tested learning rates.
For the DQMLP agent, a learning rate of 1e − 4
works the best in the Acrobot environment. The de-
caying learning rate combined with DQMLP leads
again to several bad runs.
4.3 Discussion
From the results, we observe that overestimation er-
rors occur in QMLP with a high learning rate in the
maze problems, no matter whether there is noise in
the environment. For example, in both the determin-
istic 2D maze (first row of Figure 2) and the stochas-
tic 2D maze (first row of Figure 3), obvious overesti-
mation errors appeared for high learning rates. This
means that noise in the environment is not the pri-
mary cause of overestimation in our cases. There-
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
116
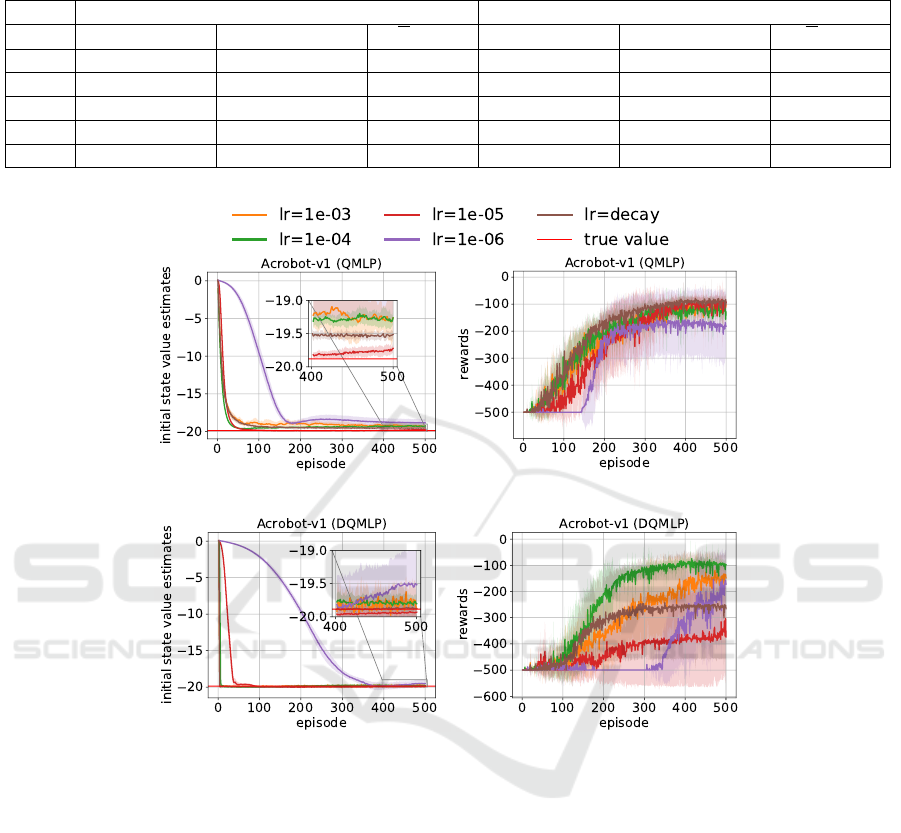
Table 6: Results of QMLP and DQMLP in the Acrobot-v1 environment. The approximate true value for the initial state of
Acrobot-v1 is -19.882 and the approximate optimal cumulative reward is -100.
QMLP (Acrobot-v1) DQMLP (Acrobot-v1)
l.r. V ± σ R ± σ R ± σ V ± σ R ± σ R ± σ
1e-3 −19.26 ± 0.34 −104.0 ± 17.9 −236 ± 13 −19.87 ± 0.21 −148.4 ± 26.7 −315 ± 73
1e-4 −19.27 ± 0.10 −129.7 ± 40.8 −228 ± 27 −19.80 ± 0.13 −98.0 ± 16.9 −237 ± 28
1e-5 −19.72 ± 0.09 −93.7 ± 16.6 −255 ± 47 −19.93 ± 0.13 −373.4 ± 176.2 −428 ± 102
1e-6 −18.85 ± 0.46 −181.6 ± 123.1 −295 ± 73 −19.52 ± 0.53 −171.8 ± 126.5 −433 ± 30
decay −19.51 ± 0.06 −98.7 ± 34.5 −207 ± 10 −19.88 ± 0.21 −265.7 ± 194.0 −335 ± 132
(a) QMLP: V
start
(b) QMLP: Reward sum
(c) DQMLP: V
start
(d) DQMLP: Reward sum
Figure 5: Performances of the QMLP and DQMLP agent in Acrobot-v1. Each curve shows the average results of 10 runs.
fore, we conclude that the problem occurs because of
function approximation errors that lead to estimating
inconsistent subsequent state-action values. For the
problems we studied, using a decaying learning rate
worked well to handle overestimation errors. Lower
learning rates can also lead to good performances, but
for some problems they lead to very slow learning.
When examining the used combination of Dou-
ble Q-learning with MLPs, where two MLPs learn
two different Q-functions, we observed that with low
learning rates, the DQMLP algorithm can suffer from
the overestimation bias. This could be caused when
both Q-function approximations become almost iden-
tical, in which case the algorithm is similar to QMLP.
In the DQMLP algorithm, actions were selected by
combining both Q-functions. It might be possible that
overestimation bias is less likely when one Q-function
is randomly selected to select an action. The DQMLP
algorithm did not use target networks and although for
the deterministic environments, this did not seem to
be a problem, the learning behavior in the stochastic
environments was less stable than the one of QMLP.
5 CONCLUSION
This paper described a novel analysis of when and
why the overestimation bias may occur when Q-
learning is combined with multilayer perceptrons.
The focus of our study was on the effect of the learn-
ing rate, and we proposed the use of decaying learning
rates in reinforcement learning. The results on four
An Investigation Into the Effect of the Learning Rate on Overestimation Bias of Connectionist Q-learning
117

different grid-worlds demonstrated that the overesti-
mation problem always occurred when higher learn-
ing rates were used and not with lower learning rates
or decaying learning rates.
We also analyzed the performance of Double Q-
learning with multilayer perceptrons under the same
conditions. This algorithm in general suffers from
more underestimation when higher learning rates are
used and surprisingly can also suffer from the overes-
timation bias when very low learning rates are used.
We also examined the performances of both algo-
rithms on two Open-AI gym control problems. The
results obtained on all six environments suggest that
in general the best performances are achieved by us-
ing the decaying learning rates.
Our future work includes studying the connection
between the learning rate and overestimation bias for
more complex environments. We also want to per-
form more research on different methods for anneal-
ing the learning rate over time.
ACKNOWLEDGEMENTS
We would like to thank the Center for Information
Technology of the University of Groningen for their
support and for providing access to the Peregrine high
performance computing cluster. Yifei Chen acknowl-
edges the China Scholarship Council (Grant number:
201806320353) for financial support.
REFERENCES
Bellman, R. (1957). Dynamic programming. Princeton Uni-
versity Press, Princeton, NJ, USA, 1 edition.
Boyan, J. A. and Moore, A. W. (1994). Generalization
in reinforcement learning: Safely approximating the
value function. In Proceedings of the 7th Interna-
tional Conference on Neural Information Processing
Systems, pages 369–376. MIT Press.
D’Eramo, C., Restelli, M., and Nuara, A. (2016). Esti-
mating maximum expected value through gaussian ap-
proximation. In International Conference on Machine
Learning, pages 1032–1040. PMLR.
Even-Dar, E. and Mansour, Y. (2003). Learning rates for
q-learning. Journal of machine learning Research,
5(Dec):1–25.
Fujimoto, S., Van Hoof, H., and Meger, D. (2018). Ad-
dressing function approximation error in actor-critic
methods. arXiv preprint arXiv:1802.09477.
Glorot, X., Bordes, A., and Bengio, Y. (2011). Deep sparse
rectifier neural networks. In Proceedings of the four-
teenth international conference on artificial intelli-
gence and statistics, pages 315–323.
Howard, R. A. (1960). Dynamic Programming and Markov
Processes. MIT Press.
Jaakkola, T., Jordan, M. I., and Singh, S. P. (1994). Con-
vergence of stochastic iterative dynamic programming
algorithms. In Advances in neural information pro-
cessing systems, pages 703–710.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Lin, L.-J. (1993). Reinforcement learning for robots using
neural networks. PhD thesis, Carnegie Mellon Uni-
versity, USA.
Lu, T., Schuurmans, D., and Boutilier, C. (2018). Non-
delusional q-learning and value-iteration. In Ad-
vances in Neural Information Processing Systems,
volume 31, pages 9949–9959. Curran Associates, Inc.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M.
(2013). Playing atari with deep reinforcement learn-
ing. arXiv preprint arXiv:1312.5602.
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A., Ve-
ness, J., Bellemare, M. G., Graves, A., Riedmiller, M.,
Fidjeland, A. K., Ostrovski, G., et al. (2015). Human-
level control through deep reinforcement learning. na-
ture, 518(7540):529–533.
Schilperoort, J., Mak, I., Drugan, M. M., and Wiering,
M. A. (2018). Learning to play pac-xon with q-
learning and two double q-learning variants. In 2018
IEEE Symposium Series on Computational Intelli-
gence (SSCI), pages 1151–1158. IEEE.
Sutton, R. S. and Barto, A. G. (2018). Reinforcement learn-
ing: An introduction. MIT press, 2nd edition.
Tesauro, G. (1994). Td-gammon, a self-teaching backgam-
mon program, achieves master-level play. Neural
computation, 6(2):215–219.
Thrun, S. and Schwartz, A. (1993). Issues in using function
approximation for reinforcement learning. In Pro-
ceedings of the 1993 Connectionist Models Summer
School. Erlbaum Associates.
Tsitsiklis, J. N. (1994). Asynchronous stochastic approxi-
mation and q-learning. Machine learning, 16(3):185–
202.
Van Hasselt, H. (2010). Double q-learning. In Advances in
Neural Information Processing Systems, pages 2613–
2621. Curran Associates, Inc.
Van Hasselt, H., Doron, Y., Strub, F., Hessel, M., Son-
nerat, N., and Modayil, J. (2018). Deep reinforce-
ment learning and the deadly triad. arXiv preprint
arXiv:1812.02648.
Van Hasselt, H., Guez, A., and Silver, D. (2016). Deep re-
inforcement learning with double q-learning. In Thir-
tieth AAAI conference on artificial intelligence. AAAI
Press.
Watkins, C. J. C. H. (1989). Learning from delayed rewards.
PhD thesis, King’s College, Cambridge, UK.
Watkins, C. J. C. H. and Dayan, P. (1992). Q-learning. Ma-
chine learning, 8(3-4):279–292.
Wiering, M. A. (2004). Convergence and divergence in
standard and averaging reinforcement learning. In
Proceedings of the 15th European Conference on Ma-
chine Learning, pages 477–488. Springer-Verlag.
You, K., Long, M., Wang, J., and Jordan, M. I. (2019).
How does learning rate decay help modern neural net-
works? arXiv preprint arXiv:1908.01878.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
118
