
Learning to Correct Reconstructions from Multiple Views
S
,
tefan S
˘
aftescu and Paul Newman
Oxford Robotics Institute, University of Oxford, U.K.
Keywords:
Deep Learning, Multi-view Fusion, Reconstruction, Mesh Correction.
Abstract:
This paper is about reducing the cost of building good large-scale reconstructions post-hoc. This is an important
consideration for survey vehicles which are equipped with sensors which offer mixed fidelity or are restricted by
road rules to high-speed traversals. We render 2D views of an existing, lower-quality, reconstruction and train
a convolutional neural network (
CNN
) that refines inverse-depth to match to a higher-quality reconstruction.
Since the views that we correct are rendered from the same reconstruction, they share the same geometry, so
overlapping views complement each other. We impose a loss during training which guides predictions on
neighbouring views to have the same geometry and has been shown to improve performance. In contrast to
previous work, which corrects each view independently, we also make predictions on sets of neighbouring
views jointly. This is achieved by warping feature maps between views and thus bypassing memory-intensive
computation. We make the observation that features in the feature maps are viewpoint-dependent, and propose
a method for transforming features with dynamic filters generated by a multi-layer perceptron from the relative
poses between views. In our experiments we show that this last step is necessary for successfully fusing feature
maps between views.
1 INTRODUCTION
Building good dense reconstructions is essential in
many robotics tasks, such as surveying, localisation,
or planning. Despite numerous advancements in both
hardware and techniques, large-scale reconstructions
remain costly to build.
We approach this issue by trying to reduce the
data acquisition cost either through the use of cheaper
sensors, or by collecting less data. To make up for the
cheaper but lower quality data, we have to turn to prior
information from the operational environment (e.g.
roads and buildings are flat, cars and trees have specific
shapes, etc). To learn these priors, we train a
CNN
over 2D views of reconstructions, and predict refined
inverse-depth maps that can be fused back into an
improved reconstruction. We take this detour through
two dimensions in order to avoid the high memory
requirements that a volumetric approach over large-
scale reconstructions would impose.
While operating in 2D, neighbouring views are
related by the underlying geometry. Previous work
(S
˘
aftescu and Newman, 2020) has leveraged this re-
lation during training, where a geometric consistency
loss is imposed between neighbouring views that pe-
nalises mismatched geometry. Here, we improve the
adeptness of this approach by showing how neigh-
bouring views can be used together when predicting
refined depth, and to that end introduce a method for
aggregating feature maps in the CNN.
To fuse feature maps from multiple views, we
could either “un-project” them into a common volume
or “collect” them into a common target view through
reprojection, as proposed by (Donne and Geiger, 2019).
As un-projecting into re-introduces the limitation we
wished to avoid, we take the latter approach.
Directly aggregating feature maps between views
– either in a volume or in a common target view – im-
plies features are somewhat independent of viewpoint.
To lift this restriction, this paper proposes a method
for transforming features between views, enabling us
to more easily aggregate feature maps from arbitrary
viewpoints. Concretely, we use the relative pose be-
tween views to generate a projection matrix in feature
space that can be used to transform feature maps, as
illustrated in Figure 1.
The contributions of this paper are as follows:
1.
We introduce a method for fusing multi-view data
that decouples much of the multi-view geometry
from model parameters. Not only do we warp
feature maps between views, but we make the key
observation that features themselves can be view-
point dependent, and show how to transform the
feature space between views.
S
˘
aftescu, S
,
. and Newman, P.
Learning to Correct Reconstructions from Multiple Views.
DOI: 10.5220/0010226409010909
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
901-909
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
901

Aggregated feature-map
MLP
1×1
Conv
T
front,top
Front view inverse-depth Top view inverse-depth
Front view feature-map Top view feature-map
Warped top-view
feature-map
Warped and transformed top-view
feature-map
Feature space
reprojection
Feature Map
Warping
Aggregate
Figure 1: Feature map aggregation. In the top two rows we
show inverse-depth images for a front and a top view, along
with two feature maps. To aggregate the feature map of the
top view with the front view, we first warp the top feature
map into the front view. The relative transform between the
top and the front view,
T
f ront,top
, is processed by a multi-
layer perceptron (
MLP
) to generate a linear transform that
maps the features from the top to the front view. Finally, the
resulting feature map can be aggregated with the front view
feature map. Note that in the front feature map the features
fade from green to violet, while in the warping of the top
view, the features do not change with depth towards the
horizon until after transforming the features. The front view
feature maps are aggregated analogously. For visualisation,
the above feature maps are projected to three channels using
the same random projection.
2.
We apply this method to the problem of correcting
dense meshes. We render 2D views from recon-
structions and learn how to refine inverse-depth,
while making use of multi-view information.
In our experiments we look at two ways of aggre-
gating feature maps and conclude that the feature space
transformation is necessary to benefit from the use of
multiple views when correcting reconstructions.
2 RELATED WORK
Our work focuses on refining the output of an existing
reconstruction system such as BOR
2
G (Tanner et al.,
2015) or KinectFusion (Newcombe et al., 2011), thus
producing higher-quality reconstructions. Since we
achieve this by operating on 2D projections and re-
fining inverse-depth, our work is related to depth re-
finement. In the following we summarise some of the
related literature and methods used in this work.
Mesh Correction.
(Tanner et al., 2018) first propose
fixing reconstructions by refining 2D projections of
them with a
CNN
, one at a time. The geometrical
relation between neighbouring views is leveraged by
(S
˘
aftescu and Newman, 2020) during training, by the
addition of a geometric consistency loss that penalises
differences in geometry. In this work, we process
neighbouring views jointly not only while training, but
also when making predictions.
Learnt Depth Refinement and Completion.
There
are several depth refinement methods similar to our ap-
proach. Multiple depth maps are fused by (Kwon et al.,
2015) with KinectFusion (Newcombe et al., 2011) to
obtain a high-quality reference mesh and use dictio-
nary learning to refine raw RGB-D images. Using
a
CNN
on the colour channels of an RGB-D image,
(Zhang and Funkhouser, 2018) predict normals and oc-
clusion boundaries and use them to optimise the depth
component, filling in holes. In the method proposed by
(Jeon and Lee, 2018), depth images are rendered from
a reconstruction at the same locations as the raw depth,
obtaining a 4000-image dataset of raw/clean depth im-
age pairs. The authors train a
CNN
to refine the raw
depth maps, and show that using it reduces the amount
of data and time needed to build reconstructions. All
of these methods require a colour image in order to
refine depth, and operate on live data, which limits
the amount of training data available. In contrast, our
method is designed to operate post-hoc, on existing
meshes. We can therefore generate an arbitrary num-
ber of training pairs from any viewpoint, removing any
viewpoint-specific bias that might otherwise surface
while learning.
Another recent approach proposes depth refine-
ment by fusing feature maps of neighbouring views
through warping (Donne and Geiger, 2019). While
this is similar to our approach, we take the additional
step of transforming the features between views, and
consider two feature aggregation methods.
Dynamic Filter Networks.
Generating filters for
convolutions dynamically conditioned on network in-
puts is presented by (Brabandere et al., 2016), where
filters are predicted for local spatial transforms that
help in video prediction tasks. Our feature transforma-
tion is also based on this framework: given a relative
transform between two views, we predict the weights
that would transform features from one view to another.
A key distinction is that, while the filters in the origi-
nal work are demonstrated over the spatial domain, we
operate solely on the channels of the feature map with
a 1 ×1 convolution.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
902
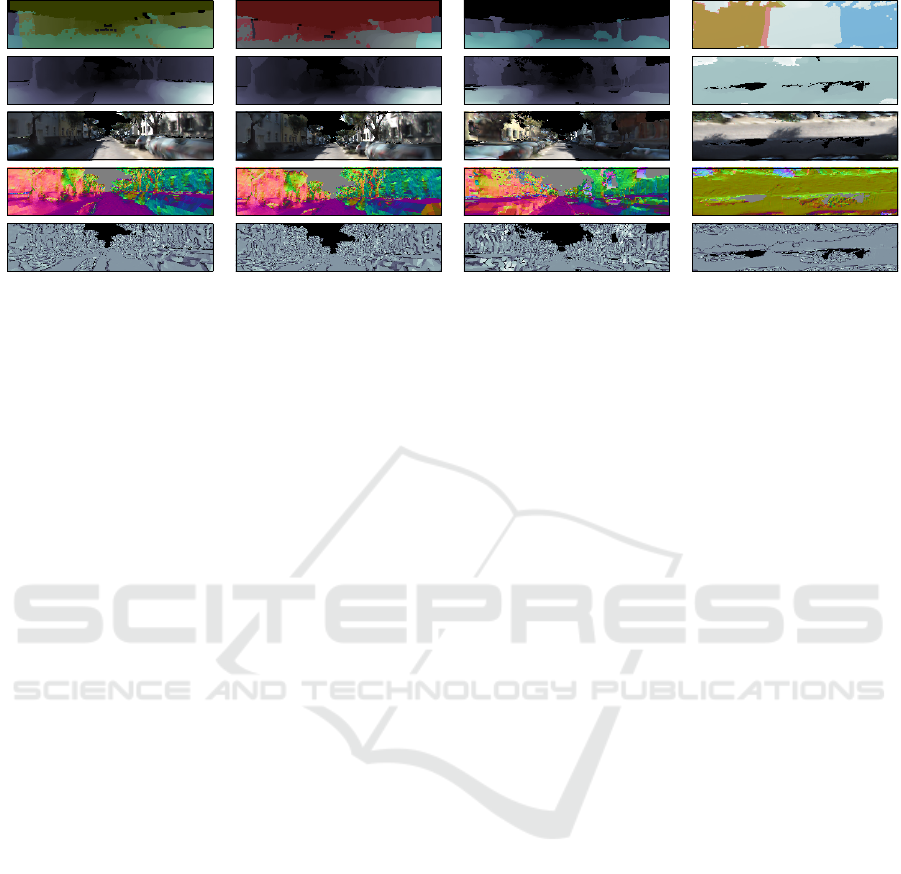
(a) Left (b) Right (c) Back (d) Top
Figure 2: Example of training data generated from a 3D mesh. Each column represents a different view rendered around the
same location. The top row shows the inverse-depth images rendered from the lidar reconstruction, with areas visible in the
other views shaded: red for left, green for right, blue for back, and cyan for top. The next four rows show the mesh features we
render from the stereo camera reconstruction: inverse-depth, colour, normals, and triangle surface area. Our proposed model
learns to refine the low-quality inverse-depth (second row), using the rendered mesh features (rows 2–5) as input, processing all
four views jointly, and supervised by the high-quality inverse-depth label (first row).
3 METHOD
3.1 Training Data
Our main goal is to correct existing dense reconstruc-
tions. To bypass the need for expensive computation,
we operate on 2D projections of a mesh from multiple
viewpoints. As we want to capture as much of the
geometry as possible in our projections, we render sev-
eral mesh features for each viewpoint: inverse-depth,
colour, normals, and triangle surface area (see Fig-
ure 2).
During training, we have access to two reconstruc-
tions of the same scene: a low-quality one that we learn
to correct, and a high-quality one that we use for super-
vision. In particular, we learn to correct stereo-camera
reconstructions using lidar reconstructions as supervi-
sion. Figure 3 shows an overview of our method.
The ground-truth labels,
∆
, are computed as the
difference in inverse-depth between high-quality and
low-quality reconstructions:
∆(p) = d
hq
(p) −d
lq
(p) (1)
where
p
is a pixel index, and
d
hq
and
d
lq
are inverse-
depth images for the high-quality and low-quality re-
construction, respectively. For notational compactness,
∆(p)
is referred to as
∆
, and future definitions are over
all values of p, unless otherwise specified.
There are several advantages to using inverse-
depth. Firstly, geometry closer to the camera will
have higher values and therefore these areas will be
emphasised during training. Secondly, inverse-depth
smoothly fades away from the camera, such that the
background – which has no geometry and is infinitely
far away – has a value of zero. If we were to use
depth, we would have to treat background as a spe-
cial case, since neural networks are not equipped to
deal with infinite values out-of-the-box. Finally, when
warping images from one viewpoint from another, as
described in the following sections, we are in essence
re-sampling. To correctly interpolate depth values, we
would have to use harmonic mean, which is less nu-
merically stable, whereas interpolating inverse-depth
can be done linearly.
3.2 Image Warping
During both training and prediction, we need to fuse
information from neighbouring views. While training,
we want to penalise the network for making predictions
that are geometrically inconsistent between views, us-
ing the geometric consistency loss from (S
˘
aftescu and
Newman, 2020), described in Section 3.3.4. When
making predictions, we want to be able to aggregate
information from multiple views. To enable this, we
need to warp images between viewpoints, such that
corresponding pixels are aligned.
Consider a view
t
, an inverse-depth image
d
t
, and
a pixel location within the image,
p
t
= [u v 1]
T
. The
homogeneous point corresponding to p
t
is:
x
t
=
K
−1
p
t
d
t
(p
t
)
, (2)
where
K
is the camera intrinsic matrix. Consider fur-
ther a nearby view
n
, an image
I
n
, and the relative
Learning to Correct Reconstructions from Multiple Views
903

transform
T
n,t
∈ SE(3)
from
t
to
n
that maps points
between views:
x
n
= T
n,t
x
t
. The pixel in view
n
corre-
sponding to p
t
is:
p
n
= K
x
(1:3)
n
x
(3)
n
, (3)
where a superscript indexes into the vector x
n
.
We can now warp image I
n
into view t:
I
t←n
(p
t
) = I
n
(p
n
). (4)
Note here that
p
n
might not have integer values, and
therefore might not lie exactly on the image grid of
I
n
.
In that case, we linearly interpolate the nearest pixels.
Since the value of inverse-depth is view-dependent,
when warping inverse-depth images we make the fol-
lowing additional definition:
f
d
t;n
(p
t
) =
x
(4)
n
x
(3)
n
, (5)
which represents an image aligned with view
t
, with
inverse-depth values in the frame of n.
Occlusions.
Pixel correspondences computed
through warping are only valid where there are no
occlusions. We therefore have need of a mask to only
take into account unoccluded regions. Therefore,
when rendering mesh features, we also render an
additional image where every pixel is assigned
the ID of the visible mesh triangle at that location.
The triangle ID is computed by hashing the global
coordinates of its vertices. We can then warp this
image of triangle IDs from the source to the target
view. If the ID of a pixel matches between the warped
source and the target image, we know that the same
surface is in view in both images – and thus that pixel
is unoccluded.
3.3 Network Architecture
3.3.1 Model
We use an encoder-decoder architecture, with asym-
metric ResNet (He et al., 2016) blocks, the sub-pixel
convolutional layers proposed by (Shi et al., 2016)
for upsampling in the decoder, and skip connections
between the encoder and the decoder to improve sharp-
ness, as introduced by the U-Net architecture (Ron-
neberger et al., 2015). Throughout the network, we
use ELU (Clevert et al., 2015) activations and group
normalisation (Wu and He, 2018). Table 1 details the
blocks used in our network. We use F = 8 input chan-
nels: 3 for colour, 3 for normals, 1 for inverse-depth,
and 1 for triangle area.
Table 1: Overview of the
CNN
architecture for error predic-
tion.
Block Type
Filter Size
/ Stride
Output Size
Input - 96 × 288 × F
Projection 7 × 7/1 96 × 288 × 16
Residual 3 × 3/1 96 × 288 × 16
Projection, Residual×2 3 × 3/2 48 × 144 × 32
Projection, Residual×2 3 × 3/2 24 × 72 × 64
Projection, Residual×2 3 × 3/2 12 × 36 × 128
Projection, Residual×5 3 × 3/2 6 × 18 × 256
Up-projection, Skip 3 × 3/
1
2
12 × 36 × 384
Up-projection, Skip 3 × 3/
1
2
24 × 72 × 192
Up-projection, Skip 3 × 3/
1
2
48 × 144 × 96
Up-projection, Skip 3 × 3/
1
2
96 × 288 × 48
Residual×2 3 × 3/1 96 × 288 × 48
Convolution 3 × 3/1 96 × 288 × 1
Since a fair portion of the input low-quality re-
construction is already correct, we train our model to
predict the error in the input inverse-depth,
∆
∗
. We
then compute the refined inverse depth as the output
of our network:
d
∗
= max(d
lq
+ ∆
∗
,0). (6)
Clipping is required here because inverse-depth
cannot be negative. However, since we are supervising
the predicted error, the network can learn even when
the predicted inverse-depth is clipped and would there-
fore lack a gradient. To ensure our network can deal
with any range of inverse-depth, we offset the input
such that it has zero mean, scale it to have standard
deviation of 1, and undo the scaling on the predicted
error, ∆
∗
.
3.3.2 Feature Map Warping and Aggregation
As our predictions are related by the geometry of a
scene, we must would like to ensure predictions are
consistent between views. This is taken into account
during training by using the geometric consistency loss
from (S
˘
aftescu and Newman, 2020), as described in
Section 3.3.4.
However, during inference we would like to ag-
gregate information from multiple views to improve
predictions. Take, for example, two views,
t
and
n
,
and feature maps in the network,
F
t
and
F
n
, after a
certain number of layers, corresponding to each of
the views. We would like to aggregate them such that
F
t
⊕ F
n
is a feature map containing information from
both views. Since the feature maps are aligned with
the input views, we cannot do that in a pixel-wise fash-
ion. Using the input depth, we warp the feature map
of one view into the frame of the other, such that the
input geometry is aligned. For the two input views, we
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
904
Geometric
Consistency
Regression
(data, ∇)
Regression
(data, ∇)
Rened
Inverse-depth
CNN
CNN
Feature Map
Aggregation
Extracted
mesh features
Inverse-depth
labels
Stereo Reconstruction
Lidar Reconstruction
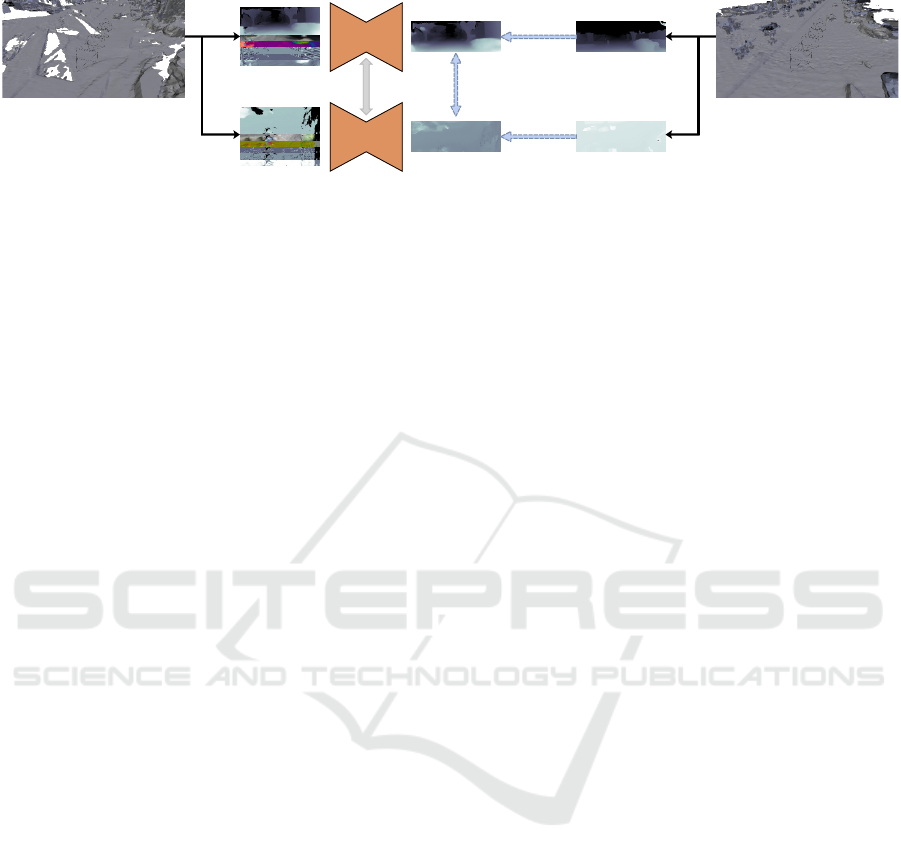
Figure 3: Illustration of our training set-up. Starting with a low-quality reconstruction (stereo camera in this instance), we
extract mesh features from several viewpoints. Our network learns to refine the input inverse-depth with supervision from a
high-quality (lidar) reconstruction. The blue arrows above indicate the losses used during training: for each view, we regress to
the high-quality inverse-depth, as well as to its gradient; between nearby prediction, we apply a geometric consistency loss to
encourage predictions with the same geometry. Within the network, feature maps are aggregated between views so information
can propagate within a neighbourhood of views, as illustrated in a two-view case in Figure 1. Adapted with permission from
(S
˘
aftescu and Newman, 2020).
can thus warp
F
n
to the viewpoint of
t
(according to
Equation 4) and then aggregate the two feature maps:
F
t,n
= F
t
⊕ F
t←n
, obtaining a feature map aligned with
t that combines information from both views.
This aggregation step is necessary (instead of sim-
ply concatenating aligned feature maps) to allow for
an arbitrary number of views. For the same reason, the
aggregation function needs to be invariant to permu-
tations of views. We consider two such aggregation
functions: averaging, and attention. For a target view
t
with neighbourhood
N = {t} ∪ {n
1
,n
2
,...}
, averag-
ing is defined as
∑
n∈N
F
t←n
/|N|
, where we consider
F
t←t
≡ F
t
.
For the attention-based aggregation, we use the
attention method proposed by (Bahdanau et al., 2014).
A per-pixel score
E
t,n
= a(F
t
,F
t←n
)
is computed using
a small 3-layer convolutional sub-network. The per-
pixel weight of each view is obtained by applying soft-
max to the scores:
A
t,n
= exp(E
t,n
)/
∑
m∈N
exp(E
t,m
)
.
Finally, the aggregation function becomes
∑
n∈N
A
t,n
·
F
t←n
. In both cases, pixels deemed occluded are
masked out.
In our model, we apply this warping and aggrega-
tion to every skip connection and to the encoder output,
thus mixing information across views and scales. For
every view in a batch, we aggregate all the other over-
lapping views within the batch.
3.3.3 Feature Space Reprojection
When the network is trained to make predictions one
input view at a time, the feature maps at intermediate
layers within the network contain viewpoint-dependent
features, as illustrated in Figure 1. Warping a feature
map from one view to another only aligns features
using the scene geometry, but does not change their
dependence on viewpoint.
Imagine, for example, two RGB-D images in an
urban scene – one from above looking down, and one
at the road level. The surface of the road will have
the same colour in both views. The depth of the road,
however, will be different: in the top view, it will be
mostly uniform, while in the road-level view it will
increase towards the horizon. We can easily establish
correspondences between pixels in the two images
if we know their relative pose. When not occluded,
corresponding pixels will have the same colour, but
not necessarily the same depth. This is because colour
is view-point independent, while depth depends on the
viewpoint. In other words, we can resample the colour
from one view to obtain the other view by directly
indexing and interpolating (as in Equation 4), while for
depth we also need to transform the values of the first
view to match the reference frame of the second view
(as in Equation 5). Armed with this observation we
propose a way to learn a mapping of features between
viewpoints.
Consider again two views
t
and
n
, and a warped
feature map
F
t←n
from the vantage point
n
. Given
a spatial location
p
, we have a feature vector
f
n
=
F
t←n
(p) ∈ R
D
, its corresponding location in space
x
n
= (x,y,z, w) ∈ P
3
, and a transform
T
t,n
∈ SE(3)
.
We compute a matrix
W = g(T
t,n
) ∈ M
D,D+4
, using a
small multi-layer perceptron (
MLP
) to model
g
. This
allows us to learn a linear transform in feature space
between view n and view t:
f
t
= W
f
n
x
n
. (7)
Without this mechanism, the network would have to
learn to extract viewpoint-independent features to al-
low for feature aggregation between views.
Concretely, we implement this as a dynamic filter
network (
DFN
), with a 4-layer
MLP
generating filters
for a
1 × 1
linear convolution of the warped feature
map
F
t←n
, which is equivalent to applying the multi-
plication in Equation 7 at every spatial location in the
feature map. To keep the
MLP
small, we first project
Learning to Correct Reconstructions from Multiple Views
905
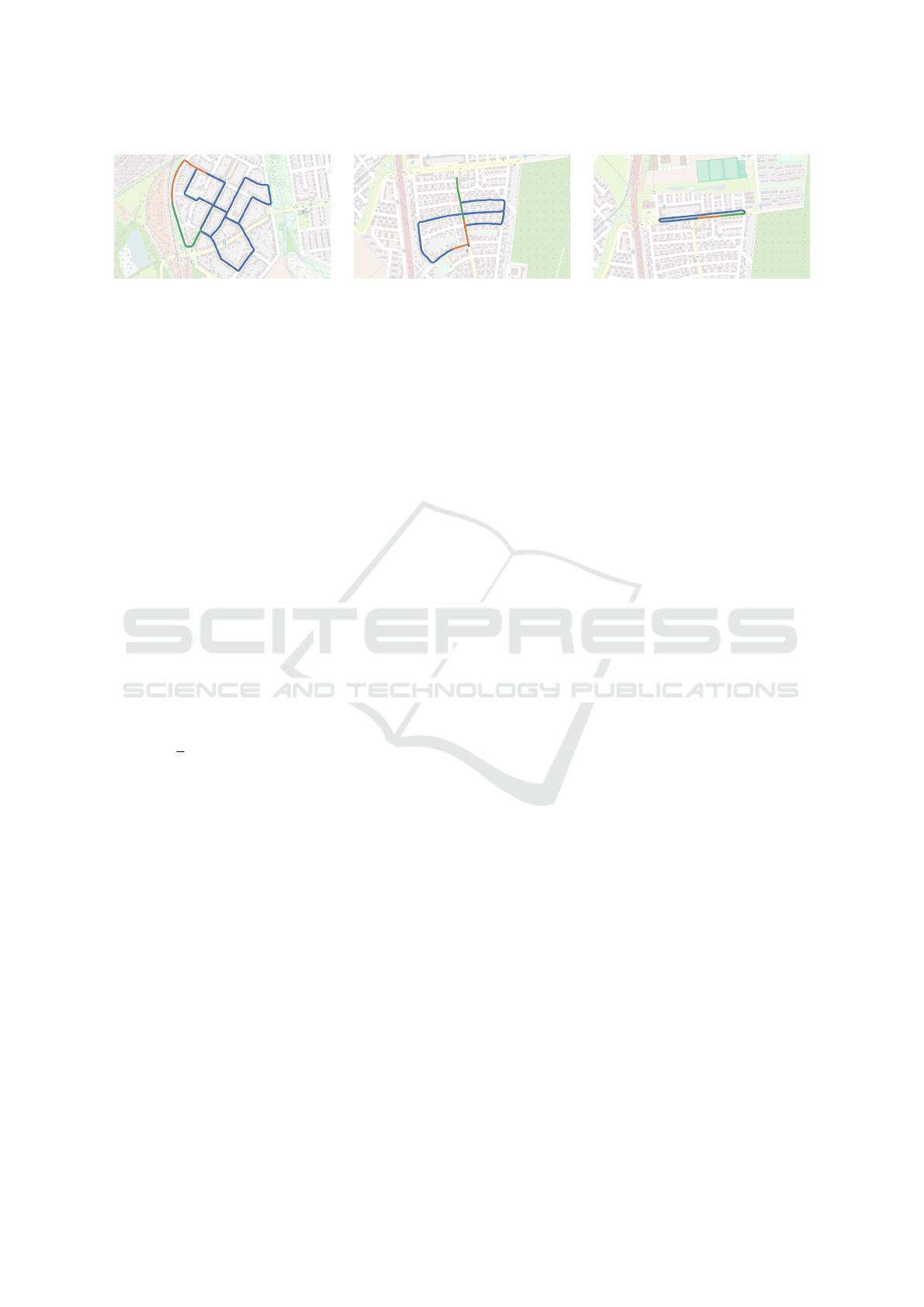
(a) Sequence 00 (b) Sequence 05 (c) Sequence 06
Figure 4: Illustration of the training (blue), validation (orange), and test (green) splits on the three
KITTI-VO
sequences we are
using. Map data copyrighted (OpenStreetMap contributors, 2017) and available from https://www.openstreetmap.org.
the input feature maps to
D = 32
dimensions, apply the
dynamically generated filters, and then project back
to the desired number of features. Both projections
are implemented using
1 × 1
convolutions. We use the
same transformation
W
across each of the the scales
that we aggregate, and all the weights associated with
feature transform operations are learnt jointly with the
rest of the weights of the network.
In the experiments, we show that this mechanism is
essential for enabling effective multi-view aggregation.
3.3.4 Loss Function Formulation
We supervise our training with labels from a high-
quality reconstruction, as sown in Figure 3. The labels
provide two per-pixel supervision signals, one for di-
rect regression,
L
dat a
, and one for prediction gradients,
L
∇
:
L
dat a
=
∑
p∈V
k
∆
∗
− ∆
k
berHu
; (8)
L
∇
=
1
2
∑
p∈V
|
∂
x
∆
∗
− ∂
x
∆
|
+
∂
y
∆
∗
− ∂
y
∆
, (9)
where
V
is the set of valid pixels (to account for miss-
ing data in the ground-truth),
∆
∗
and
∆
are the pre-
diction and the target, respectively, and
k · k
berHu
is
the berHu norm (Owen, 2007), whose advantages for
depth prediction have been explored by (Laina et al.,
2016; Ma and Karaman, 2018). We use the Sobel op-
erator (Sobel and Feldman, 1968) to approximate the
gradients in Equation 9.
The geometric consistency loss guides nearby pre-
dictions to have the same geometry, and relies on
warped nearby views
d
∗
t←n
. For a target view
t
, a set
of nearby views
N
, the set of pixels unoccluded in a
nearby view
U
n
(see Figure 2, top row), this loss is
defined as:
L
gc
=
∑
n∈N
∑
p∈U
n
d
∗
t←n
−
f
d
∗
t;n
. (10)
Both
d
∗
t←n
and
f
d
∗
t;n
are aligned with view
t
and contain
inverse-depth values in frame
n
, as per Equation 4
and Equation 5. Note that
U
n
has no relation to the
set of valid pixels (
V
) from the previous losses, since
this loss is only computed between predictions. This
enables the network to make sensible predictions even
in parts of the image which have no valid label.
Finally, we also include an
L
2
weight regulariser,
L
reg
, to reduce overfitting by keeping the weights
small. The overall objective is thus defined as:
L = λ
dat a
L
dat a
+ λ
∇
L
∇
+ λ
gc
L
gc
+ λ
reg
L
reg
, (11)
where the
λ
s are weights for each of the components.
We use
λ
dat a
= 1
,
λ
∇
= 0.1
,
λ
gc
= 0.1
, and
λ
reg
=
10
−6
.
4 EXPERIMENTS
4.1 Experimental Setup
4.1.1 Dataset
For the experiments, we use sequences “00”, “05”,
and “06” from the KITTI visual odometry (
KITTI-VO
)
dataset (Geiger et al., 2013). Using the BOR
2
G recon-
struction system (Tanner et al., 2015), we create pairs
of low/high quality reconstructions (meshes) from the
stereo camera, and lidar, respectively. Following the
same trajectory used when collecting data (as it is
collision-free), every 0.65 m we render mesh features
from four views (left, right, back, top), illustrated in
Figure 2. For each view, we render a further 3 sam-
ples with small pose perturbations for data augmenta-
tion. In total, we obtain 178 544 distinct views of size
96 × 288 over 7.2 km.
4.1.2 Training and Inference
We train all our models on Nvidia Titan V GPUs, using
the Adam optimiser (Kingma and Ba, 2015), with
β
1
= 0.9
,
β
2
= 0.999
, and a learning rate that decays
linearly from
10
−4
to
5 · 10
−6
over 120 000 training
steps. We clip the gradient norm to 80. Each training
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
906
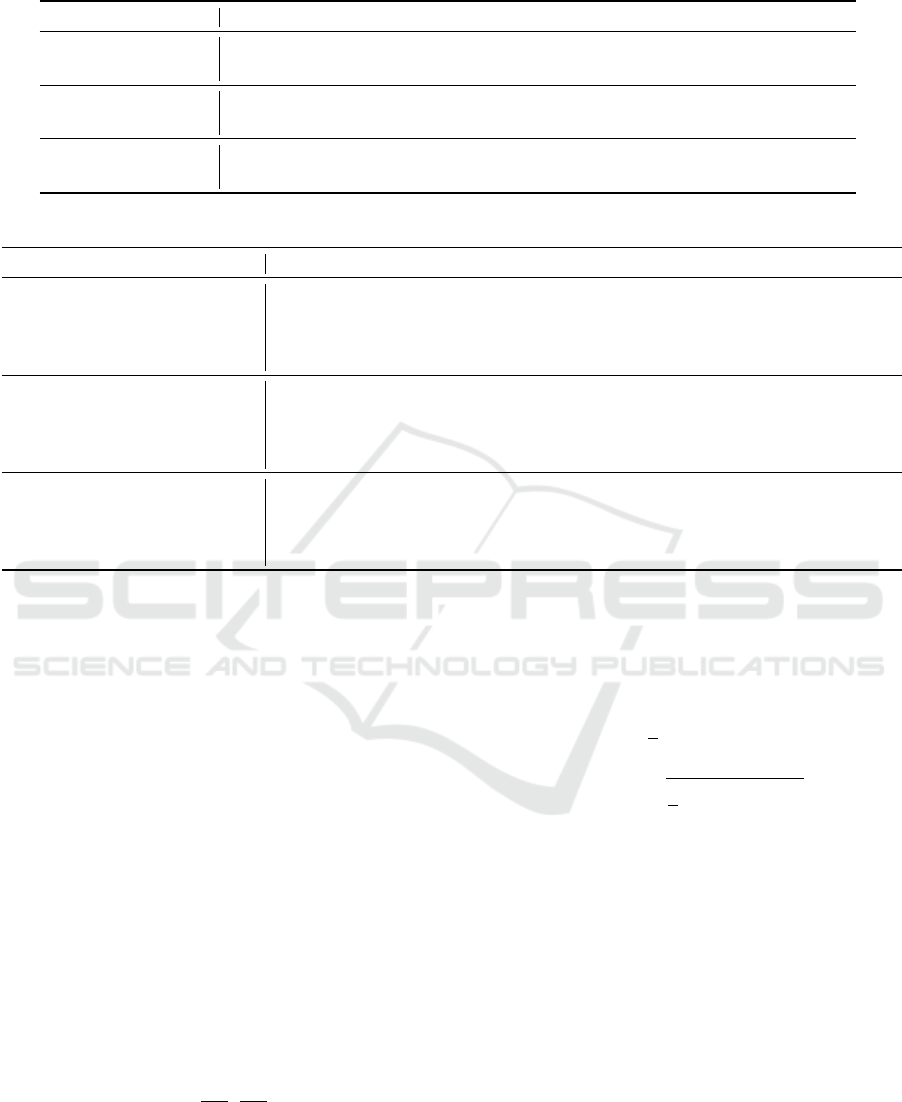
Table 2: Depth Error Correction Results.
Model iMAE iRMSE δ < 1.05 δ < 1.15 δ < 1.25 δ < 1.56 δ < 1.95
Uncorrected 1.21 · 10
−2
3.80 · 10
−2
51.92% 82.44% 86.66% 90.54% 91.97%
Baseline 7.09 · 10
−3
2.47 · 10
−2
73.81% 89.33% 93.08% 96.71% 97.98%
Ours (no feat. tf.; avg.) 7.11 · 10
−3
2.45 · 10
−2
72.70% 89.08% 92.87% 96.53% 97.86%
Ours (no feat. tf.; attn.) 7.22 · 10
−3
2.52 · 10
−2
73.60% 89.18% 92.90% 96.57% 97.87%
Ours (w/ feat. tf.; avg.) 6.82 · 10
−3
2.38 · 10
−2
74.22% 90.01% 93.51% 96.79% 98.01%
Ours (w/ feat. tf.; attn.) 6.88 · 10
−3
2.40 · 10
−2
74.34% 89.85% 93.47% 96.89% 98.10%
Table 3: Generalisation Capability of Depth Error Correction.
Model Train Test iMAE iRMSE δ < 1.05 δ < 1.15 δ < 1.25 δ < 1.56 δ < 1.95
Uncorrected – 06 2.43 · 10
−2
8.39 · 10
−2
49.63% 72.89% 75.07% 78.48% 80.23%
Baseline 00; 05 06 2.09 · 10
−2
8.21 · 10
−2
59.99% 79.16% 82.62% 86.33% 88.54%
Ours (no feat. tf.) 00; 05 06 2.06 · 10
−2
8.11 · 10
−2
61.57% 77.95% 81.46% 85.45% 87.88%
Ours (w/ feat. tf.) 00; 05 06 1.94 · 10
−2
6.80 · 10
−2
63.90% 78.80% 82.00% 85.80% 88.04%
Uncorrected – 05 1.15 · 10
−2
3.59 · 10
−2
55.85% 81.60% 85.07% 88.86% 90.90%
Baseline 00; 06 05 7.76 · 10
−3
2.98 · 10
−2
72.23% 87.54% 91.23% 95.46% 97.41%
Ours (no feat. tf.) 00; 06 05
7.79 · 10
−3
2.97 · 10
−2
71.57% 87.20% 90.94% 95.31% 97.34%
Ours (w/ feat. tf.) 00; 06 05 7.65 · 10
−3
2.96 · 10
−2
73.24% 87.61% 91.16% 95.34% 97.29%
Uncorrected – 00 1.19 · 10
−2
3.24 · 10
−2
53.53% 80.46% 85.18% 89.55% 91.38%
Baseline 05; 06 00 8.40 · 10
−3
2.50 · 10
−2
67.52% 86.83% 91.28% 95.85% 97.70%
Ours (no feat. tf.) 05; 06 00 8.32 · 10
−3
2.49 · 10
−2
66.04% 86.65% 91.34% 95.80% 97.64%
Ours (w/ feat. tf.) 05; 06 00 8.40 · 10
−3
2.53 · 10
−2
67.90% 87.02% 91.39% 95.83% 97.64%
batch contains 4 different examples, and each example
is composed of the four views rendered around a single
location. Unless otherwise mentioned, we train our
models for 500 000 steps. During inference, our full
model runs at 11.3 Hz when aggregating 4 input views,
compared to the baseline that runs at 12.6 Hz, so our
method comes with little computational overhead.
4.1.3 Metrics
As our method operates on 2D views extracted from
the mesh we are correcting, we measure how well
our network predicts inverse-depth images, with the
idea that better inverse-depth images result in better
reconstructions. We employ several metrics common
in the related tasks of depth prediction and refinement.
One way to quantify performance is to see how of-
ten the error in prediction is small enough to be correct.
The thresholded accuracy measure is essentially the
expectation that a given pixel is within a fraction
thr
of the label:
δ = E
p∈V
I
max
d
hq
d
∗
,
d
∗
d
hq
< thr
, (12)
where
d
hq
is the reference inverse-depth,
d
∗
is the
predicted inverse depth,
V
is the set of valid pix-
els,
n
is the cardinality of
V
, and
I(·)
represents the
indicator function. For granularity, we use
thr ∈
{1.05,1.15,1.25,1.25
2
,1.25
3
}.
In addition, we also compute the mean absolute er-
ror (
MAE
) and root mean square error (
RMSE
) metrics
to quantify per pixel error:
iMAE =
1
n
∑
p∈V
d
∗
− d
hq
, (13)
iRMSE =
s
1
n
∑
p∈V
(d
∗
− d
hq
)
2
, (14)
where the ‘i’ indicates that the metrics are computed
over inverse-depth images.
4.2 Gross Error Correction
For the first set of experiments, we take the first 80%
of the views from each sequence as training data, the
next 10% for validation, and show our results on the
last 10%. An illustration of the KITTI sequences and
splits is shown in Figure 4.
As baseline, we train our model with geometric
consistency loss but without any feature aggregation.
During inference, this model makes predictions one
view at a time.
To illustrate our method, we train a further two
models for each aggregation method (averaging and
Learning to Correct Reconstructions from Multiple Views
907

attention): one with the feature transform disabled,
and one with it enabled.
As it can be seen in Table 2, the baseline already
refines inverse-depth significantly. Without our feature
transformation, the models are unable to use multi-
view information because of the vastly different view-
points, and indeed this slightly hurts performance.
Only when transforming the features between view-
points does the performance increase over the baseline,
highlighting the importance of our method for success-
fully aggregating multiple views.
4.3 Generalisation
To asses the ability of our method to generalise on
unseen reconstructions, we divide our training data by
sequence: we use two of the sequences for training,
and the third for testing. Sequences 00 and 05 are
recorded in a suburban area with narrow roads, while
sequence 06 is a loop on a divided road with a median
strip, a much wider and visually distinct space. We
train models for 200 000 steps and aggregate feature
maps by averaging. The results in Table 3 show that
our method successfully uses information from mul-
tiple views, even in areas of a city different from the
ones it was trained on. Furthermore, they reaffirm the
need for our feature transformation method in addition
to warping.
5 CONCLUSION AND FUTURE
WORK
In conclusion, we have presented a new method for
correcting dense reconstructions via 2D mesh feature
renderings. In contrast to previous work, we make pre-
dictions on multiple views at the same time by warping
and aggregating feature maps inside a
CNN
. In addi-
tion to warping the feature maps, we also transform the
features between views and show that this is necessary
for using arbitrary viewpoints.
The method presented here aggregates feature
maps between every pair of overlapping input views.
This scales quadratically with the number of views
and thus limits the size of the neighbourhood we can
reasonably process. Future work will consider aggre-
gation into a shared 2D spatial representation, such as
a
360
◦
view, which would scale linearly with the input
neighbourhood size.
While in this paper we have applied our method
to correct stereo reconstructions using lidar as high-
quality supervision, our approach operates strictly on
meshes, so it is agnostic to the types of sensors used
to produce the low- and high-quality reconstructions,
so long as it is trained accordingly.
REFERENCES
Bahdanau, D., Cho, K., and Bengio, Y. (2014). Neural
machine translation by jointly learning to align and
translate. In Proceedings of The International Confer-
ence on Learning Representations (ICLR).
Brabandere, B. D., Jia, X., Tuytelaars, T., and Gool, L. V.
(2016). Dynamic filter networks. In Proceedings of The
Conference on Neural Information Processing Systems
(NIPS).
Clevert, D.-A., Unterthiner, T., and Hochreiter, S. (2015).
Fast and accurate deep network learning by exponen-
tial linear units (ELUs). In Proceedings of The In-
ternational Conference on Learning Representations
(ICLR).
Donne, S. and Geiger, A. (2019). Defusr: Learning non-
volumetric depth fusion using successive reprojections.
In Proceedings of The IEEE/CVF International Con-
ference on Computer Vision and Pattern Recognition
(CVPR).
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The kitti dataset. The Inter-
national Journal of Robotics Research, 32(11):1231–
1237.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings
of The IEEE/CVF International Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
770–778.
Jeon, J. and Lee, S. (2018). Reconstruction-based pairwise
depth dataset for depth image enhancement using CNN.
In Proceedings of The European Conference on Com-
puter Vision (ECCV).
Kingma, D. and Ba, J. (2015). Adam: A method for stochas-
tic optimization. In Proceedings of The International
Conference on Learning Representations (ICLR).
Kwon, H., Tai, Y.-W., and Lin, S. (2015). Data-driven depth
map refinement via multi-scale sparse representation.
In Proceedings of The IEEE/CVF International Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 159–167.
Laina, I., Rupprecht, C., Belagiannis, V., Tombari, F., and
Navab, N. (2016). Deeper depth prediction with fully
convolutional residual networks. In Proceedings of The
IEEE International Conference on 3D Vision (3DV),
pages 239–248.
Ma, F. and Karaman, S. (2018). Sparse-to-dense: Depth pre-
diction from sparse depth samples and a single image.
In Proceedings of The IEEE International Conference
on Robotics and Automation (ICRA).
Newcombe, R. A., Izadi, S., Hilliges, O., Molyneaux, D.,
Kim, D., Davison, A. J., Kohli, P., Shotton, J., Hodges,
S., and Fitzgibbon, A. W. (2011). KinectFusion: Real-
time dense surface mapping and tracking. In Proceed-
ings of The IEEE International Symposium on Mixed
and Augmented Reality (ISMAR), pages 127–136.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
908

OpenStreetMap contributors (2017). Planet dump re-
trieved from https://planet.osm.org. https://www.
openstreetmap.org.
Owen, A. B. (2007). A robust hybrid of lasso and ridge
regression. Contemporary Mathematics, 443:59–72.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-Net:
Convolutional networks for biomedical image segmen-
tation. In Medical Image Computing and Computer
Assisted Intervention (MICCAI).
Shi, W., Caballero, J., Husz
´
ar, F., Totz, J., Aitken, A. P.,
Bishop, R., Rueckert, D., and Wang, Z. (2016). Real-
time single image and video super-resolution using
an efficient sub-pixel convolutional neural network.
In Proceedings of The IEEE/CVF International Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 1874–1883.
Sobel, I. and Feldman, G. (1968). A 3
×
3 isotropic gradi-
ent operator for image processing. presented at the
Stanford Artificial Intelligence Project (SAIL).
S
˘
aftescu,
S
,
. and Newman, P. (2020). Learning geometrically
consistent mesh corrections. In Proceedings of The
International Conference on Computer Vision Theory
and Applications (VISAPP).
Tanner, M., Pini
´
es, P., Paz, L. M., and Newman, P. (2015).
BOR
2
G: Building optimal regularised reconstructions
with GPUs (in cubes). In Proceedings of The Interna-
tional Conference on Field and Service Robotics (FSR),
Toronto, Canada.
Tanner, M., S
˘
aftescu,
S
,
., Bewley, A., and Newman, P. (2018).
Meshed up: Learnt error correction in 3D reconstruc-
tions. In Proceedings of The IEEE International Con-
ference on Robotics and Automation (ICRA), Brisbane,
Australia.
Wu, Y. and He, K. (2018). Group normalization. In Proceed-
ings of The European Conference on Computer Vision
(ECCV).
Zhang, Y. and Funkhouser, T. A. (2018). Deep depth comple-
tion of a single RGB-D image. In Proceedings of The
IEEE/CVF International Conference on Computer Vi-
sion and Pattern Recognition (CVPR), pages 175–185.
Learning to Correct Reconstructions from Multiple Views
909
