Learning Joint Twist Rotation for 3D Human Pose Estimation
from a Single Image
Chihiro Nakatsuka, Jianfeng Xu and Kazuyuki Tasaka
KDDI Research, Inc., Saitama, Japan
Keywords: 3D Human Pose Estimation, Learning Joint Twist Rotation, Swing-twist Decomposition.
Abstract: We consider monocular 3D human pose estimation with joint rotation representations because they are more
expressive than joint location representations and better suited to some applications such as CG character
control and human motion analysis in sports or surveillance. Previous approaches have encountered difficul-
ties when estimating joint rotations with actual twist rotation around limbs. We present a novel approach to
estimating joint rotations with actual twist rotations from a single image by handling joint rotations separately
decomposed into swing and twist rotations. To extract twist rotations from an image, we emphasize the joint
appearances and use them effectively in our model. Our model estimates the twist angles with an average
radian error of 0.14, and we show that estimation of twist rotations achieves a more precise 3D human pose.
1 INTRODUCTION
In recent years, monocular 3D human pose estimation
has been attracting attention in the computer vision
field. Monocular 3D human pose estimation makes it
possible to capture human motions in 3D space with-
out dedicated devices, and it is expected that it will be
used for many applications such as CG character con-
trol and human motion analysis in sports or surveil-
lance.
3D human poses are generally described in two
ways: 3D joint locations with their connections or 3D
joint rotations with a skeletal body model (Ionescu et
al., 2014). The pose representations based on joint lo-
cations are widely used and the estimation methods
have been improved in terms of robustness and run-
time efficiency (Mehta et al., 2017; Xu et al., 2020).
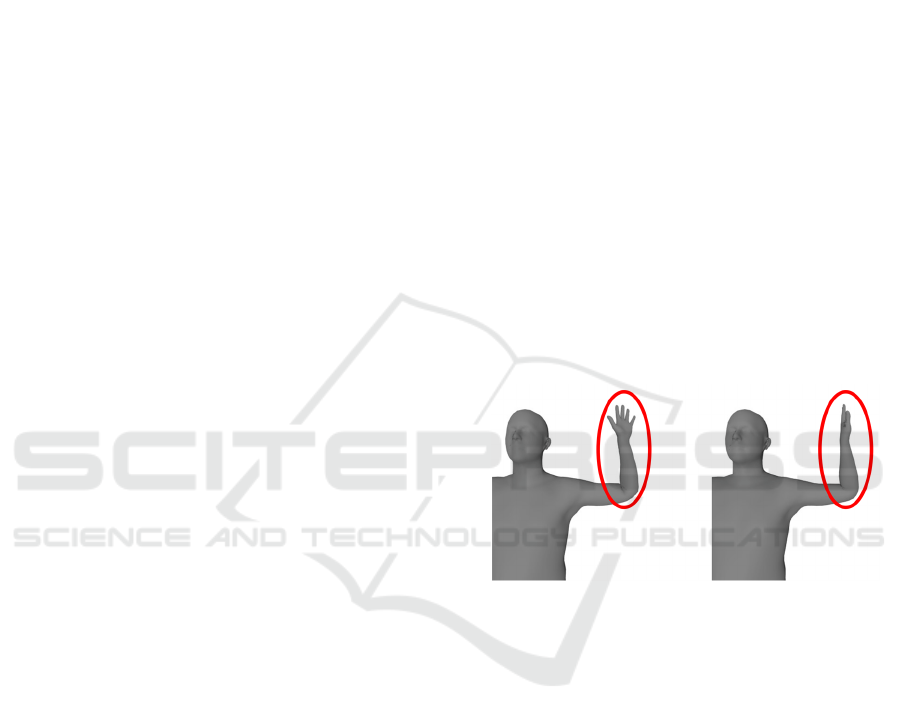
However, most of the representations are too ambig-
uous to express precise poses such as twist of limbs as
shown in Figure 1, and they lack the precision needed
for some applications like CG character control.
On the other hand, the representations based on
joint rotations against the template pose express more
precise poses. The pose parameters of the SMPL body
model (Loper et al., 2015) are a well-known example.
The SMPL body model reconstructs a 3D body mesh
and joint locations depending on the shape and pose
parameters. There are a variety of approaches (Bogo
et al., 2016; Kanazawa et al., 2017; Pavlakos et al.,
2019) that can be used to estimate pose parameters,
Figure 1: An example for different poses with same body
joint locations of the left elbow and left wrist. Body joint
locations have ambiguities to express a 3D body pose.
although these approaches run into difficulties when
estimating actual twist rotations, which are a compo-
nent of joint rotations around connected limbs. This
is because they mainly aim to reduce joint location
errors. Twist rotations are estimated using pose priors
such as angle limitations to avoid unusual poses with
impossible twists, or by using additional body key-
points like finger joints with longer processing time
and a clearer appearance of the whole body.
Our goal is to estimate joint rotations with actual
twist rotations from a single image with a minimal
number of calculations for real-time applications. It is
difficult to estimate twist rotations with the other
components of joint rotations because they are not
clearly visible in images compared to the other com-
ponents such as the swing rotations of limbs. In addi-
tion, it is difficult to train a model to estimate twist
rotations because there are relatively few images of
Nakatsuka, C., Xu, J. and Tasaka, K.
Learning Joint Twist Rotation for 3D Human Pose Estimation from a Single Image.
DOI: 10.5220/0010222703790386
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
379-386
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
379

people twisting their limbs in natural scenes, and it is
difficult to get accurate ground truth for twist rota-
tions from images.
To solve these problems, we focus on estimating
twist angles around limbs by swing-twist decomposi-
tion of joint rotations and emphasizing the appearance
of limb joints because we believe important infor-
mation for twist estimation appears around the joints.
We assume that 3D joint locations are obtainable by
previous approaches (Mehta et al., 2017; Xu et al.,
2020) and they can be utilized to estimate swing rota-
tions. Furthermore, we prepare a pseudo ground truth
of joint rotations for the CMU Panoptic Dataset (Joo
et al., 2015) as the training and evaluation dataset by
using the previous approach (Pavlakos et al., 2019)
and annotating the qualities of their results.
Our model estimates twist angles around arms
with an average radian error of 0.14. Reconstructed
joint rotations with given 3D joint locations and esti-
mated twist angles are improved by an average of
0.08 radians in terms of twist rotations compared to
reconstructed joint rotations with only given 3D joint
locations. We also discuss how twist rotations affect
human body mesh reconstruction.
Our main contributions are summarized as fol-
lows.
We reduce the difficulty of estimating joint rota-
tions with actual twist rotations by decomposing
joint rotations into swing and twist rotations.
We present the first model for estimation of actual
twist angles from a single image directly in real
time.
We show how estimation of twist rotations
achieves a more precise 3D human pose.
Below, we review studies related to 3D human
pose estimation with joint rotations (Section 2). Then,
we present the data preparation method and our ap-
proach (Sections 3 and 4). In the experimental section
(Section 5), we demonstrate the performance of our
approach and discuss the results. Finally, we present
our conclusion and future work (Section 6).
2 RELATED WORK
There are many 3D pose estimation approaches. Here,
we discuss the most relevant approaches for handling
3D joint rotations with a skeletal body model.
Bogo et al. (2016), Lassner et al. (2017), Xiang et
al. (2018), Pavlakos et al. (2019) and Mehta et al.
(2019) proposed model fitting approaches to estimate
pose and shape parameters for a skeletal body model
from a single image. They extract 2D landmarks or
3D features from a single image and optimize body
model parameters to fit to this geometric information
and other additional information such as pose priors
and time consistency. Pose prior has some variations,
and Murthy et al. (2019) proposed priors that de-
scribed the relationship between swing and twist ro-
tations. Such additional information is effective for
avoiding strange poses. However, it is not sufficient
for estimation of precise poses including actual twist
rotations. As shown in some previous studies (Lass-
ner et al., 2017; Xiang et al., 2018; Pavlakos et al.,
2019), more geometric information allows poses to be
estimated more precisely, however, it increases com-
putational complexity. We aim to estimate actual
twist rotations with a small number of calculations.
Another research group (Kanazawa et al., 2017;
Omran et al., 2018; Pavlakos et al., 2018; Rong et al.,
2019) proposed direct regression approaches for pose
parameters. They use 2D keypoints or body part seg-
mentation as an explicit intermediate representation
to regress pose parameters. Their approaches are
computationally rapid, but tend to be less accurate be-
cause pose parameter regression encounters problems
due to the complexity and discontinuity of 3D rota-
tions. Kolotouros et al. (2019a) attempt to integrate
these direct regression approaches with model fitting
approaches, which tend to be slow but accurate, to
compensate for the disadvantages of each approach.
However, it is still difficult to estimate precise and
accurate poses with a smaller number of calculations.
More recent approaches (Zhou et al., 2019; Varol
et al., 2018; Kolotouros et al., 2019b) avoid regress-
ing pose parameters directly. Zhou et al. (2019) re-
gress joint rotations by using 5D and 6D rotation rep-
resentations instead of pose parameters as more suit-
able representations for neural networks. Varol et al.
(2018) and Kolotouros et al. (2019b) attempt to di-
rectly regress the body mesh from a single image.
They obtained accurate and precise results with fewer
calculations. However, their method requires high
cost 3D mesh annotations for training. We regress the
twist angles as a simpler target than 5D/6D rotation
or 3D meshes without high cost annotations such as
3D meshes.
3 DATA PREPARATION
In the training and evaluation phases of our approach,
we require human images with their 3D joint rotations
including accurate twist rotations. There are several
datasets suitable for performing 3D human pose esti-
mation from images (Ionescu et al., 2014; Joo et al.,
2015; Lassner et al, 2017). We avoid datasets with
motion sensors because sensors will become noise on
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
380

the human body appearance when extracting essential
features about twist rotations that are not clearly visi-
ble in images.
We use the CMU Panoptic Dataset (Joo et al.,
2015) because it has a huge number of natural human
multiview images with camera parameters and accu-
rate 3D pose annotations. In the CMU Panoptic Da-
taset, 3D pose annotations are described in 3D joint
locations for just the body or body and hands, and
they have no twist rotation data. We predict joint ro-
tations and twist rotations from the existing annota-
tions of 3D body and hands joint locations using the
SMPLify-x method (Pavlakos et al., 2019), which is
able to estimate pose parameters of the SMPL body
model accurately and precisely. We customize the
SMPLify-x method by fitting the body model to 3D
joint locations instead of 2D joint locations. Then, we
select high-quality predictions manually. “High qual-
ity” means the body joint locations and the palm ori-
entations of the reconstructed SMPL model are visu-
ally consistent with the pose of the person in the im-
age. Twist rotations are extracted as pseudo ground
truth from the selected predictions and 3D joint loca-
tions. Note that we create annotations of twist rota-
tions solely around the arms and we ignore pose pa-
rameter errors for the lower body because there are
few high-quality results for the whole body due to the
relatively sparse annotations for the lower body in the
original CMU Panoptic dataset.
Here, we explain SMPL pose parameters and our
settings. The SMPL body model defines the kinematic
tree with the pelvis as the root (e.g. the child joint of
the shoulder is the elbow.) As shown in Figure 2, joint
rotations of SMPL pose parameters mean the relative
rotation for their child joints and the connected limbs
around them, and they can be decomposed to swing
and twist rotations. Joint rotations of the SMPL pose
parameters are described by angle-axis representations.
The 3D mesh of the SMPL model is controlled by the
pose and shape parameters, and 3D joint locations are
regressed from the mesh. For simplicity, we assume
that the shape parameter is always set to zero; meaning
a normal body shape. We refer to the pose with zero
pose parameters as the “T pose”.
Figure 2: Left sphere is the parent joint and right sphere is
the child joint. There is a limb between both joints. The joint
rotation for the parent joint is decomposed into swing and
twist rotations.
For extraction of twist rotations, we follow the
swing-twist decomposition formula of Dobrowolski
(2015) as the direct method. First, we convert the
joint rotations adopted as the pose parameters to qua-
ternion representations from axis-angle representa-
tions. Let 𝑅
be the rotation of joint 𝐽
(𝑗=0,…,3 for
right/left shoulder and right/left elbow). For the fol-
lowing explanations, we designate the conversion
from axis-angle representation to quaternion repre-
sentation as 𝜑 and inverse conversion as 𝜓. We as-
sume that 𝑅
can be decomposed to the swing rotation
𝑆
and the twist rotations 𝑇
as formula (1).
𝑅
=𝑇
∙𝑆
(1)
Let 𝑣
be the direction vector from joint 𝐽
to its child
joint 𝐽
on T pose, and rotate 𝑣
by 𝑅
or 𝑆
; then we
obtain rotated direction vector 𝑤
as formula (2).
𝑤
=𝑅
∙
𝑣
0
∙𝑅
=𝑆
∙
𝑣
0
∙𝑆
(2)
𝑆
can be calculated from 𝑣
and 𝑤
by formula (3).
𝑆
=𝜑cos
𝑣
∙𝑤
∙
𝑣
𝑤
𝑣
𝑤
(3)
Here, we get the twist rotation 𝑇
and the twist angle
𝜃
around its rotation axis.
𝑇
=𝑅
∙𝑆
(4)
𝜃
=
𝜓𝑇
, 𝑖𝑓
𝜓𝑇
𝜓𝑇
=𝑤
𝜓𝑇
, 𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒
(5)
Finally, we convert the range of angles 𝜃
from
2𝜋,2𝜋 to
𝜋,𝜋
. The twist angle is a simpler
representation than the other representations. In our
method, we represent twist rotations by twist angles
expressed in radians.
Learning Joint Twist Rotation for 3D Human Pose Estimation from a Single Image
381
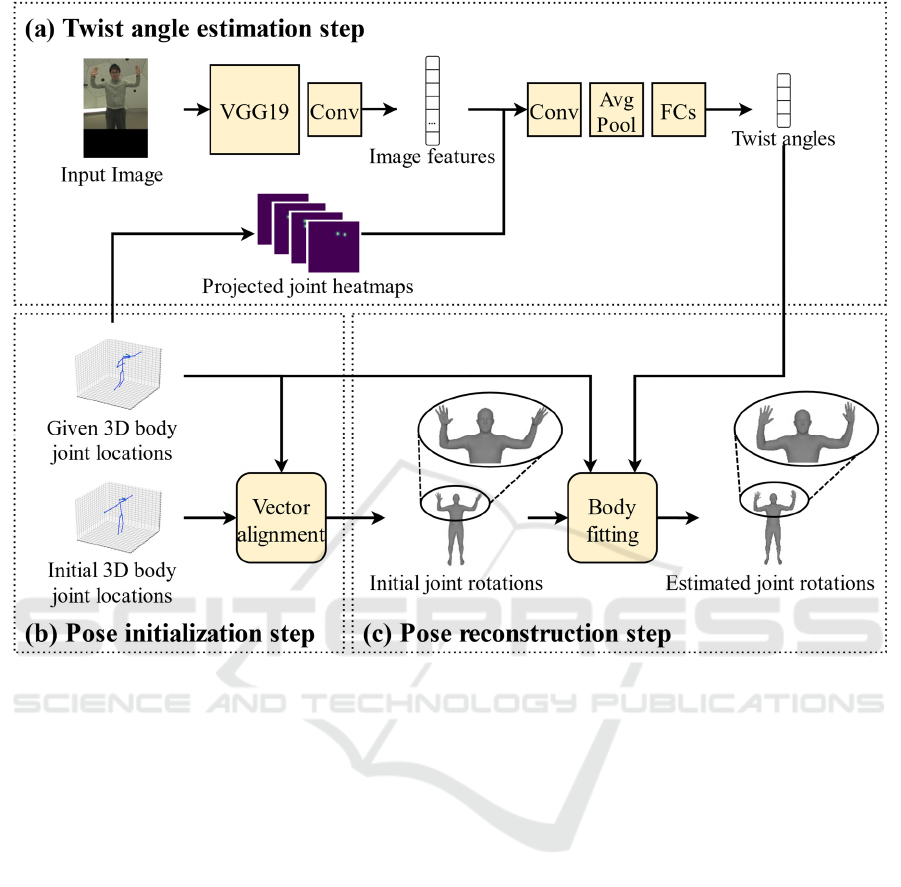
Figure 3: (a)Twist angle estimation step. Our model estimates twist angles around arms from a single RGB image and the
heatmaps for projecting the parent joint and child joint locations on the input image. (b) Pose initialization step. Initial 3D
body joint locations (T pose) and given 3D body joint locations undergo vector alignment to calculate the rotations between
the direction vectors for each limb, and the skeletal body model is initialized by the calculated joint rotations. (c) Pose recon-
struction step. The initialized skeletal body model undergoes body fitting so that its 3D body joint locations correspond more
closely to the given locations and its twist angles around the arms correspond more closely to estimated angles.
4 APPROACH
We propose an approach to estimate twist angles
around arms from a single RGB image and recon-
struct the skeletal body pose by using given 3D
body joint locations and estimated twist angles
around arms. Our approach has 3 steps: twist angle
estimation step (Section 4.1), pose initialization
step (Section 4.2) and pose reconstruction step
(Section 4.3). An overview is shown in Figure 3.
4.1 Twist Angle Estimation
Our model estimates twist angles around arms from
a single RGB image and the heatmaps for the pro-
jected parent joint and child joint locations on the
input image as shown in Figure 3(a).
First, we extract image features 𝐹 from a single
RGB image 𝐼∈ℝ
by using the first 10 lay-
ers of the pretrained VGG19 from the ImageNet
dataset (Simonyan & Zisserman, 2014) and one
convolutional layer. In our approach, the input im-
age 𝐼 is assumed to contain a single person. We
consider that the twist rotation around a limb
mainly affects the appearance of its parent and
child joint. Thus, we also create the heatmaps
𝐻
,
∈ℝ
for the locations of the parent joint 𝐽
and child joint 𝐽
on the input image 𝐼. The joint
locations on the image are projected from given 3D
body joint locations and given camera parameters.
Here, the heatmap 𝐻
,
is calculated by formulas
(6) and (7).
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
382
𝐻
𝑝
=exp
𝑝 𝑙
𝜎
(6)
𝐻
,
𝑝
=max 𝐻
𝑝,𝑙
,𝐻
𝑝,𝑙
(7)
Where 𝐻
∈ℝ
is the heatmap of the joint 𝐽
loca-
tion, 𝑝∈ℝ
is any location on heatmaps, 𝐻
∙
is the
value of the heatmap on the input location, 𝑙
∈ℝ
is
the location of 𝐽
and 𝜎
controls the spread of the
peak on the heatmap. These heatmaps 𝐻
,
and image
features 𝐹 are concatenated to emphasize the image
features around the parent and child joints effectively,
and then they are passed to the convolutional layer,
average pooling layer, and three fully connected lay-
ers.
Thereby, we obtain the set of twist angles 𝜃
∗
. The
range of these twist angles is
𝜋,𝜋
, however, the
valid range for human joints is limited around zero.
Therefore, we do not need to consider the singularity
around 𝜋 and 𝜋. For this reason, we simply adopt
the mean squared error as the loss function for 𝜃
∗
.
The 𝜃
∗
and the ground truth 𝜃 are the normalized
range from
𝜋,𝜋
to
0,1
by formula (8) for sim-
plicity of training, and our model is trained by mini-
mizing the loss function ℒ𝑜𝑠𝑠
defined by for-
mula (9).
𝜃
̅
=
𝜃𝜋
2
𝜋
(8)
ℒ𝑜𝑠𝑠
=𝜃
̅
𝜃
∗
(9)
4.2 Pose Initialization
In the pose initialization step, the skeletal body model
is initialized to make the following pose reconstruc-
tion step easier as shown in Figure 3(b). We make the
relative joint locations of the skeletal body model
closer to given 3D body joint locations. We call the
joint locations of the skeletal body model with T pose
as the initial 3D body joint locations. The vector from
a specific joint location to its child joint location is
called as a limb direction vector. The pair of limb di-
rection vectors for the initial joint locations and given
joint locations are applied to the vector alignment.
Vector alignment means calculating a rotation be-
tween the pair of direction vectors in the same manner
as expressed in the formula (3). The skeletal body
model is initialized by the obtained joint rotations.
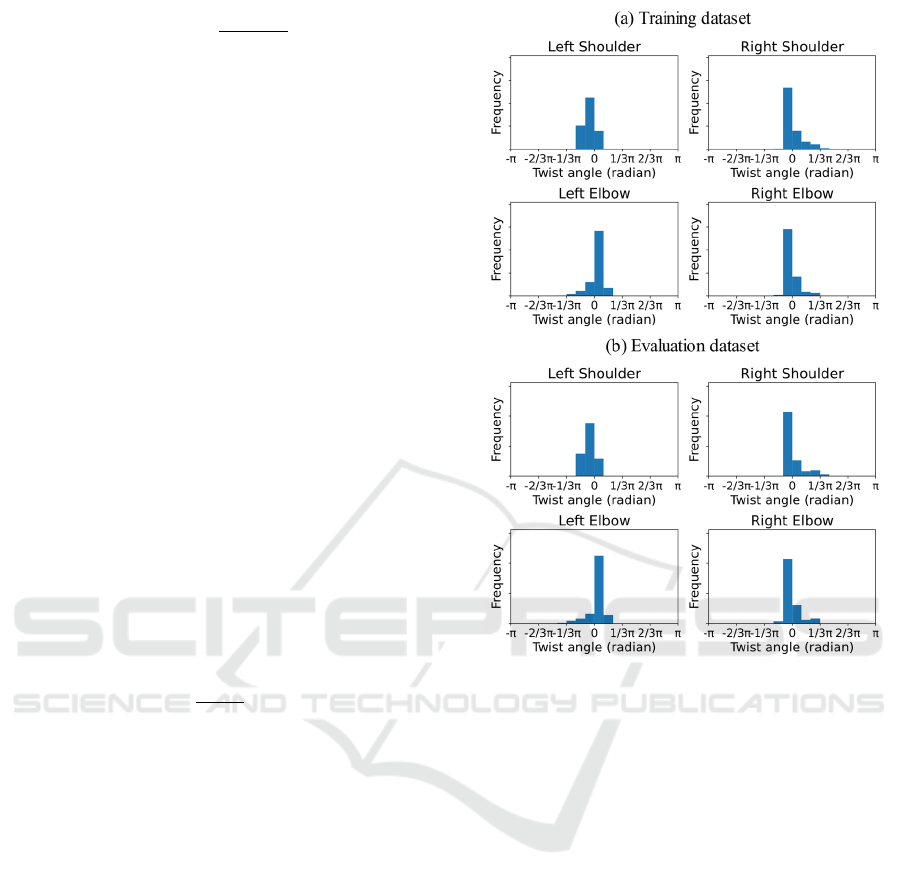
Figure 4: The distributions for twist angles around the arms
of (a) training and (b) evaluation dataset. The title of each
graph is the parent joint name of the target limb.
4.3 Pose Reconstruction
In the pose reconstruction step, the skeletal body
model is optimized to fit the given 3D body joint lo-
cations and estimated twist angles as shown in Figure
3(c). We seek to minimize the objective function
ℒ𝑜𝑠𝑠
defined in formula (10) to (12) by using the
Levenberg-Marquardt algorithm.
ℒ
𝑜𝑠𝑠
=𝐿
𝐿
(10)
ℒ
𝑜𝑠𝑠
=𝜃
𝜃
∗
(11)
ℒ
𝑜𝑠𝑠
=
ℒ
𝑜𝑠𝑠
𝜀ℒ𝑜𝑠𝑠
(12)
Where 𝐿
and 𝐿
are the 3D body joint loca-
tions of the current skeletal body pose and given pose.
𝜃
is the twist angles around arms calculated from
the current skeletal body pose by formulas (1) to (5).
The 𝜀 controls the weight for ℒ𝑜𝑠𝑠
. Finally, we
obtain the prediction of the joint rotations.
Learning Joint Twist Rotation for 3D Human Pose Estimation from a Single Image
383
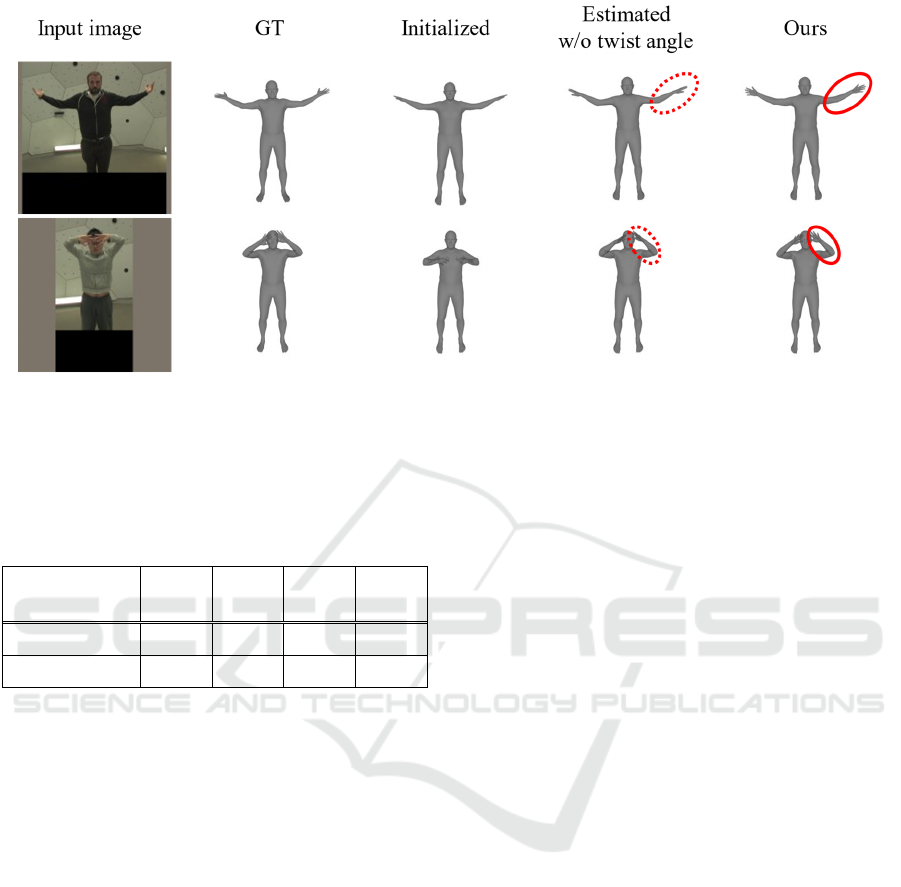
Figure 5: Body meshes reconstructed by the ground truth joint rotations (GT), initial joint rotations at the pose initialization
step (Initialized), estimated joint rotations without twist angle estimation (Estimated w/o twist angle) and estimated joint
rotations with twist angle estimation (Ours). Our approach improves the twist of arms (solid line circle) compared to the result
without twist angle estimation (dotted line circle).
Table 1: The mean error of estimated twist angles (radian)
for the evaluation dataset (623 poses) with some of them
having a large twist angle around any limb (96 poses).
parent joint
name
LSho RSho LElb RElb
eval data 0.06 0.17 0.18 0.15
w large twist 0.06 0.20 0.17 0.17
5 EXPERIMENTS
We present the performance of our approach by eval-
uating the accuracy of the twist angle estimated at the
first step and the poses reconstructed at the final step
and the computational efficiency. Reconstructed
poses are evaluated in terms of twist angle errors,
joint rotation errors and vertex errors. First, we show
our dataset and training details, and then each result
is described and discussed.
5.1 Dataset and Training Details
Our dataset prepared in Section 3 provides the human
body images with the ground truth joint rotations and
locations. It has 2,042 poses with 61,539 images from
multiple views and 7 video sequences for training,
and 623 poses with 623 images from a single view
and 2 video sequences for evaluation. These 9 video
sequences are the same as the sequences used in the
experiments conducted by Xiang et al. (2019). Figure
4 shows the distributions for twist angles around arms
of a (a) training and (b) evaluation dataset. Twist an-
gles are concentrated on small values, and it makes
training difficult.
Our model requires an input image size of
368x368 (single person cropped). We train our model
for 19.7K iterations with 8 images in a batch.
5.2 Twist Angle Estimation Accuracy
We evaluate our model at the twist angle estimation
step. Our approach requires 3D body joint locations
as input. We use the ground truth locations for our all
evaluation to focus on twist of arms. Table 1 shows
the mean error of estimated twist angles in radians for
the evaluation dataset with 623 poses and some of
them with 96 poses including a large twist angle (over
0.35 radians) around any limb. The estimated twist
angles for the evaluation dataset has small errors from
0.06 to 0.18 with an average of 0.14 radians. There
are few poses with a large twist angle in the training
dataset as shown in Figure 4(a), however, the errors
for the evaluation dataset with large twist angles are
still relatively small from 0.06 to 0.20 with an average
of 0.15 radians. It means our model makes it possible
to capture the magnitude of the twist around arms ro-
bustly from a whole-body image and the heatmaps of
joint locations.
5.3 Pose Reconstruction Accuracy
We evaluate reconstructed joint rotations at the final
step of our approach and show the effect of the twist
angles estimated at the first step by comparing with
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
384
the poses reconstructed without twist angles. The 𝜀 in
formula (12) is 0.02 for reconstruction with twist an-
gles and the 𝜀 is zero for reconstruction without twist
angles. Table 2(a) shows the mean error of twist an-
gles in radians calculated from the reconstructed joint
rotations in the same manner as formulas (1) to (5).
Results were obtained for the entire evaluation data
and part of the data having a large twist angle around
any limb. For the entire evaluation data, estimated
twist angles improve the results by a max of 0.15 and
an average of 0.08 radians, and for the data with a
large twist angle, a greater effect was observed for
most joints, improving by a max of 0.33 and an aver-
age of 0.12 radians.
We also evaluate the result by the quaternion error
of joint rotations. Quaternion error 𝐸
shows the
magnitude of rotation between two rotations, and it is
defined by formula (13).
𝐸
=
‖
𝜓
𝑄
∙𝑄
‖
(13)
Where 𝑄
and 𝑄
are respectively the esti-
mated and ground truth joint rotations in quaternion
representation. The mean quaternion errors
with/without estimated twist angles for the entire/part
of the evaluation data are shown in Table 2(b). The
estimated twist angles improve the results especially
for elbow rotations. Table 2(a) and Table 2(b) show
that the errors for right shoulder rotations for the data
with a large twist angle are increased by estimated
twist angles. Estimated twist angles around the limb
connected to the right shoulder are relatively inaccu-
rate as shown in Table 1, and it makes the optimiza-
tion around the right shoulder difficult. We consider
that the lower accuracy of estimated twist angles for
the right shoulder is caused by data bias. The evalua-
tion dataset includes the rare right shoulder postures
for training data.
In Table 2(c), we present the vertex-to-vertex
(v2v) error of the reconstructed body mesh. The v2v
error is the mean error of the reconstructed mesh ver-
tex locations. They are usually used for evaluation of
reconstructed joint rotations. There are negligible dif-
ferences between the v2v error results. It is not suita-
ble for evaluation of twist estimation because the dis-
placement of limb meshes caused by a twist rotation
is minor in comparison with whole body meshes. In
addition, these v2v errors are much smaller than pre-
vious approaches in general because the precise 3D
body joint locations are given as input unlike previous
ones.
Finally, we show that the estimated twist angles
improve the quality of body mesh reconstruction
around arms in Figure 5. It’s highly effective against
body meshes with large twist angles.
5.4 Runtime and Model Size
On a NVIDIA TITAN V GPU, our model at the twist
angle estimation step is small with 41.98 MB param-
eters, and it performs very rapidly at 5 msec/person.
It shows our model estimates twist angles from a sin-
gle image directly in real time. However, the pose re-
construction step takes 139 msec/person on 12 CPUs
(Intel(R) Core(TM) i7-8700K CPU @ 3.70GHz) and
the total processing time is 189 msec/person. Alt-
hough it is difficult to make a direct comparison due
to differences in input and output data, SMPLify-x
method (Pavlakos et al., 2019), which is able to esti-
mate the poses accurately and precisely, takes much
longer time in our environment.
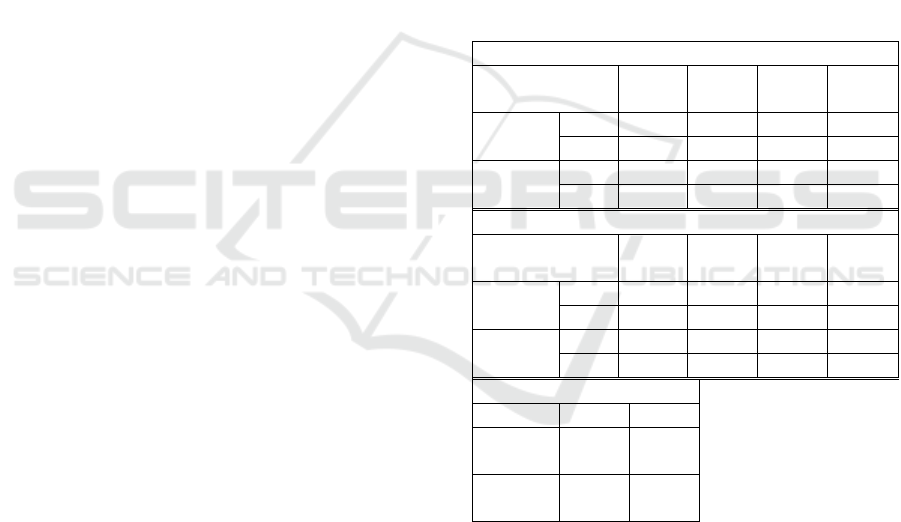
Table 2: The mean error of (a) twist angles (radian)/(b) qua-
ternions (radian)/(c) v2v (mm) calculated from the recon-
structed joint rotations with/without estimated twist angles
for entire/part of the evaluation data.
(a)
parent joint
name
LSho RSho LElb RElb
eval
data
w 0.29
0.23 0.15 0.20
w/o 0.29 0.32 0.30 0.27
w large
twist
w 0.23 0.42
0.28 0.30
w/o 0.25 0.25 0.61 0.60
(b)
parent joint
name
LSho RSho LElb RElb
eval
data
w 0.42 0.37
0.50 0.50
w/o 0.39 0.39 0.64 0.65
w large
twist
w 0.33 0.52
0.56 0.59
w/o 0.32 0.34 0.87 0.91
(c)
w w/o
eval
data
20.74 20.13
w large
twist
26.34 25.67
6 CONCLUSION
We proposed a novel approach to estimate twist rota-
tions around limbs to improve 3D human pose esti-
mation from a single RGB image. Previous vision-
based approaches did not handle twist rotations
around limbs directly because of their ambiguity. Our
experiments demonstrated the feasibility of estimat-
ing twist rotations from an image and its effect on
pose reconstruction using a skeletal body model.
Learning Joint Twist Rotation for 3D Human Pose Estimation from a Single Image
385

There is no enough dataset which includes 3D
joint rotations on images, so we focus on normal twist
rotations around the arms. As future work, we will
create a larger dataset to evaluate our model in more
detail and estimate twist rotations around the other
limbs including variety of poses. We also believe cre-
ating a larger dataset for training and applying data
balancing to twist angles bias would be effective
strategies to improve the robustness and accuracy of
our model. We will also tackle the problems of pose
reconstruction from noisy 3D body joint locations and
make a performance comparison between previous
approaches and ours.
REFERENCES
Bogo, F., Kanazawa, A., Lassner, C., Gehler, P., Romero,
J., & Black, M. J. (2016). Keep It SMPL: Automatic
Estimation of 3D Human Pose and Shape from a Single
Image. ECCV, 561–578.
Dobrowolski, P. (2015). Swing-twist decomposition in
Clifford algebra. In arXiv [cs.RO]. arXiv.
http://arxiv.org/abs/1506.05481
Ionescu, C., Papava, D., Olaru, V., & Sminchisescu, C.
(2014). Human3.6M: Large Scale Datasets and Predic-
tive Methods for 3D Human Sensing in Natural Envi-
ronments. TPAMI/PAMI, 36(7), 1325–1339.
Joo, H., Liu, H., Tan, L., Gui, L., Nabbe, B., Matthews, I.,
Kanade, T., Nobuhara, S., & Sheikh, Y. (2015). Panop-
tic studio: A massively multiview system for social mo-
tion capture. ICCV, 3334–3342.
Kanazawa, A., Black, M. J., Jacobs, D. W., & Malik, J.
(2018). End-to-end recovery of human shape and pose.
CVPR, 7122–7131.
Kolotouros, N., Pavlakos, G., Black, M. J., & Daniilidis, K.
(2019a). Learning to reconstruct 3D human pose and
shape via model-fitting in the loop. ICCV, 2252–2261.
Kolotouros, N., Pavlakos, G., & Daniilidis, K. (2019b).
Convolutional mesh regression for single-image human
shape reconstruction. CVPR, 4501–4510.
Lassner, C., Romero, J., Kiefel, M., Bogo, F., Black, M. J.,
& Gehler, P. V. (2017). Unite the people: Closing the
loop between 3d and 2d human representations. CVPR,
6050–6059.
Loper, M., Mahmood, N., Romero, J., Pons-Moll, G., &
Black, M. J. (2015). SMPL: a skinned multi-person lin-
ear model. TOG, 34(6), 1–16.
Mehta, D., Sotnychenko, O., Mueller, F., Xu, W., Elgharib,
M., Fua, P., Seidel, H.-P., Rhodin, H., Pons-Moll, G.,
& Theobalt, C. (2020). XNect: Real-time Multi-Person
3D Motion Capture with a Single RGB Camera. TOG,
39(4), 82:1–82:17.
Mehta, D., Sridhar, S., Sotnychenko, O., Rhodin, H.,
Shafiei, M., Seidel, H.-P., Xu, W., Casas, D., & Theo-
balt, C. (2017). VNect: real-time 3D human pose esti-
mation with a single RGB camera. TOG, 36(4), 1–14.
Murthy, P., Butt, H. T., Hiremath, S., Khoshhal, A., &
Stricker, D. (2019). Learning 3D joint constraints from
vision-based motion capture datasets. IPSJ Transac-
tions on Computer Vision and Applications, 11(1), 5.
Omran, M., Lassner, C., Pons-Moll, G., Gehler, P., &
Schiele, B. (2018). Neural Body Fitting: Unifying Deep
Learning and Model Based Human Pose and Shape Es-
timation. 3DV, 484–494.
Pavlakos, G., Choutas, V., Ghorbani, N., Bolkart, T., Os-
man, A. A., Tzionas, D., & Black, M. J. (2019). Expres-
sive Body Capture: 3D Hands, Face, and Body From a
Single Image. CVPR, 10967–10977.
Pavlakos, G., Zhu, L., Zhou, X., & Daniilidis, K. (2018).
Learning to estimate 3D human pose and shape from a
single color image. CVPR, 459–468.
Rong, Y., Liu, Z., Li, C., Cao, K., & Loy, C. C. (2019).
Delving deep into hybrid annotations for 3d human re-
covery in the wild. ICCV, 5340–5348.
Simonyan, K., & Zisserman, A. (2015). Very Deep Convo-
lutional Networks for Large-Scale Image Recognition.
ICLR.
Varol, G., Ceylan, D., Russell, B., Yang, J., Yumer, E., Lap-
tev, I., & Schmid, C. (2018). Bodynet: Volumetric in-
ference of 3d human body shapes. ECCV, 20–36.
Xiang, D., Joo, H., & Sheikh, Y. (2019). Monocular total
capture: Posing face, body, and hands in the wild.
CVPR, 10965–10974.
Xu, J., Yu, Z., Ni, B., Yang, J., Yang, X., & Zhang, W.
(2020). Deep Kinematics Analysis for Monocular 3D
Human Pose Estimation. CVPR, 899–908.
Zhou, Y., Barnes, C., Lu, J., Yang, J., & Li, H. (2019). On
the Continuity of Rotation Representations in Neural
Networks. CVPR, 5738–5746.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
386
