
A Quality Framework for Automated Planning Knowledge Models
Mauro Vallati
a
and Thomas Leo Mccluskey
b
School of Computing and Engineering, University of Huddersfield, Queensgate, Huddersfield, U.K.
Keywords:
Automated Planning, Domain Models, Knowledge Engineering, Quality of Models.
Abstract:
Automated planning is a prominent Artificial Intelligence challenge, as well as a requirement for intelligent
autonomous agents. A crucial aspect of automated planning is the knowledge model, that includes the relevant
aspects of the application domain and of a problem instance to be solved. Despite the fact that the quality
of the model has a strong influence on the resulting planning application, the notion of quality for automated
planning knowledge models is not well understood, and the engineering process in building such models is still
mainly an ad-hoc process. In order to develop systematic processes that support a more comprehensive notion
of quality, this paper, building on existing frameworks proposed for general conceptual models, introduces a
quality framework specifically focused on automated planning knowledge models.
1 INTRODUCTION
Automated planning is an area within Artificial Intel-
ligence that has matured to such a degree that there
exists a wide range of applications utilising planning.
Embedding automated planning engines within ap-
plications is a specialist activity, as the application
requires a knowledge model to be built for opera-
tion with the planning engine. Planning knowledge
models are conceptual models, in that they are ex-
plicit (and formal) representations of some propor-
tions of reality as perceived by some actor (Weg-
ner and Goldin, 1999). These models may contain
representations of objects, relations, properties, func-
tions, resources, actions, events and processes, in
the application domain. There are significant differ-
ences between generic conceptual models and plan-
ning knowledge models, however, in that the latter is
aimed more for its operational value than for its use
in interactions and communications with domain ex-
perts and other stakeholders.
Up to now, despite the existence of quality frame-
works for various conceptual models (see, e.g., (Lind-
land et al., 1994; Krogstie, 2012; Krogstie et al.,
2006)), there has been no overall framework for con-
sidering the quality of the various components in-
volved in the life cycle of the planning knowledge
model. There has been research into the quality of
planning applications in terms of verification and val-
a
https://orcid.org/0000-0002-8429-3570
b
https://orcid.org/0000-0001-8181-8127
idation (Frank, 2013), and in terms of accuracy and
completeness of the knowledge model (McCluskey
et al., 2017; Vallati and Kitchin, 2020), but no overall
conceptual model covering the many aspects of such
models.
In this paper, building on existing frameworks
proposed for general conceptual models, we intro-
duce a quality framework specifically focused on au-
tomated planning knowledge models. The main ben-
efit of a framework is to replace ad-hoc notions of
quality, and ad-hoc knowledge engineering processes,
with a connected, composite and over-arching notion,
that can be used within all work relating to this en-
deavour. The proposed framework is exploited for in-
troducing and describing specialised aspects of qual-
ity of automated planning knowledge models, which
are based on semiotic layers and on planning-specific
aspects.
As a first solid contribution to the field, we demon-
strate the usefulness of the proposed framework as a
means for assessing a range of tools environments for
knowledge engineering for automated planning. The
exercise highlights areas and processes that the ex-
isting tools do not support appropriately, and where
future work of the planning community should be fo-
cused. Finally, we argue for the importance of a com-
prehensive quality framework for the planning area,
by providing a list of benefits that the framework is
likely to bring into the AI planning field. The pa-
per is aimed at giving knowledge engineers a broader
perspective on the issues involved in capturing and
Vallati, M. and Mccluskey, T.
A Quality Framework for Automated Planning Knowledge Models.
DOI: 10.5220/0010216806350644
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 2, pages 635-644
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
635

maintaining planning knowledge, and to provide AI
and planning experts with an over-arching notion of
quality, and an example of its usefulness.
The remainder of this paper is organised as fol-
lows. First, the required background on automated
planning is provided, and the distinctive characteris-
tic of planning knowledge models are then presented.
Then, the proposed quality framework is introduced,
and the involved quality concepts are then detailed in
the subsequent section. After that, it is shown how the
quality framework can be concretely applied. Finally,
a discussion on the benefits of the proposed frame-
work is provided, and conclusions are given.
2 AUTOMATED PLANNING
Automated planning deals with finding a (partially
or totally ordered) sequence of actions transform-
ing the environment from some initial state to a de-
sired goal state (Ghallab et al., 2004). As an ex-
ample, in the classical STRIPS-inspired represen-
tation, atoms are predicates and States are defined
as sets of ground predicates. A planning opera-
tor o = (name(o), pre(o), eff
−
(o), eff
+
(o)) is specified
such that name(o) = op name(x
1
, . . . , x
k
) (op name is
a unique operator name and x
1
, . . . x
k
are variable sym-
bols (arguments) appearing in the operator), pre(o)
is a set of predicates representing the operator’s pre-
conditions, eff
−
(o) and eff
+
(o) are sets of predicates
representing the operator’s negative and positive ef-
fects. Actions are ground instances of planning op-
erators. An action a = (pre(a), eff
−
(a), eff
+
(a)) is
applicable in a state s if and only if pre(a) ⊆ s.
Application of a in s (if possible) results in a state
(s \ eff
−
(a)) ∪ eff
+
(a).
This knowledge is made explicit in two compo-
nents: a domain model and a problem instance, to-
gether forming the knowledge model. When using
the dominant family of planning knowledge represen-
tation languages – the PDDL, the domain model and
problem instance are provided to planners as two dif-
ferent files, and the same domain model is used for
all the problems of the application. In the restricted
world view of classical planning, a domain model is
specified via sets of predicates and planning opera-
tors. A problem instance is specified via an initial
state and set of goal atoms, that need to be reached. A
solution plan is a sequence of actions such that a con-
secutive application of the actions in the plan (starting
in the initial state) results in a state that satisfies the
goal.
The classical planning model can be extended, in
order to handle a wider range of constraints and in-
crease expressiveness. On this matter, the interested
reader is referred to (Ghallab et al., 2004).
2.1 Peculiarities of Planning Knowledge
Models
A major part of the AI planning component is played
by the knowledge model, which enables rational plan-
ning and reasoning. Therefore, to evaluate the plan-
ning component, one needs to be able to discuss
and ultimately measure the quality of the constructed
model.
In the last decades, a number of frameworks have
been introduced for evaluating the quality of con-
ceptual models, and for identifying quality notions
and corresponding goals and metrics. The SEQUAL
framework (Lindland et al., 1994) was initially intro-
duced as a general framework for understanding qual-
ity of any conceptual model, and then extended by
adding a larger number of quality aspects (Krogstie
et al., 1995; Krogstie and Jørgensen, 2002), or by fo-
cusing on specific types of models, such as interac-
tive models (Krogstie et al., 2006) or business pro-
cess models (Krogstie, 2012), data (Krogstie, 2013),
and enterprise models (Krogstie and de Flon Arnesen,
2004).
Essentially, planning knowledge models are con-
ceptual models, in that they are explicit (and for-
mal) representations of some proportions of reality
as perceived by some actor (Wegner and Goldin,
1999). Nevertheless, there are significant differences
between generic conceptual models and planning
knowledge models. Planning knowledge models are
usually formulated into a planner input language di-
rectly from a requirements specification, which sum-
marises the current understanding and interpretation
of the application domain. The planning component
is usually a module of a larger framework, that has
a very limited interaction with human experts and
stakeholders (McCluskey et al., 2017). A good ex-
ample is that of an autonomous agent, which contains
a planning component within a module of the larger
(and more complex) architecture, that is supposed to
operate autonomously, with no (or limited) needs for
humans in the loop. It is of course important that an
expert can read and understand the models for val-
idation and maintenance purposes, but the main fo-
cus is on effectiveness and efficiency. In fact, once a
model has been thoroughly tested and validated, with
the support of domain and planning experts, it is usu-
ally reformulated for the sake of performance. Au-
tomated reformulation of a model, of course, tends
to make it more difficult to analyse and interpret the
model by human experts.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
636

The main differences between general conceptual
models and planning knowledge models can be found
in the modelling process. General conceptual mod-
elling processes may have various, and sometimes un-
clear, goals. The modelling may be performed for
representing a process, in order to analyse and im-
prove it, or may aim at generating models that can be
shared in order to transfer knowledge between differ-
ent actors. Instead, in Planning, the modelling has
a clear and well defined goal: enabling a planning
engine to generate solution plans, given some con-
straints bounds, that show some desired characteris-
tics. In other words, the quality of a planning model
also depends on its ability to allow planning engines
to generate solution plans that show some predefined
characteristics. Characteristics may vary, according
to the expressiveness of the exploited language and
the type of planning that is performed. Solution plans
may be required to be optimal, with regards to some
aspects like the number of actions, the overall cost, or
the predicted duration.
The aforementioned dependencies, and the a-
priori known goal of performing modelling for plan-
ning, have to be reflected into quality frameworks that
should incorporate both planning engine and solution
plan. The planning engine plays an important role
in the quality framework because, as routinely ob-
served in International Planning Competitions, dif-
ferent planning approaches show very different be-
haviours even when provided with the same knowl-
edge model. Furthermore, different planning engines
tend to support different subsets, and different ver-
sions, of the PDDL language. The selection of the
planning engine is therefore an important step of the
planning modelling process, as it affects (and is af-
fected) by the encoding language, and by the knowl-
edge model itself.
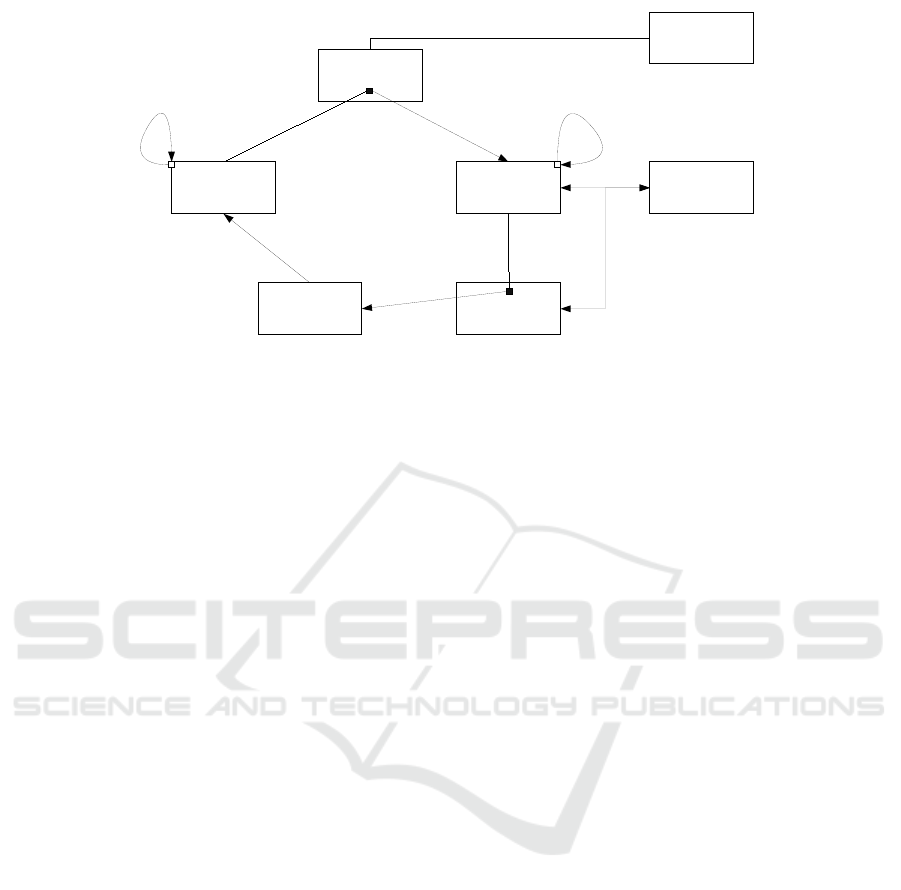
3 THE QUALITY FRAMEWORK
The proposed quality framework for automated plan-
ning knowledge models aims at representing all the
aspects that affect the quality of models, and high-
lighting how the different aspects interact. Fig-
ure 1 presents the basic ideas of the quality frame-
work, which originate from the specialisation of the
SEQUAL framework and the subsequent work of
Krogstie et al (Krogstie et al., 2006). The framework
considers different components (represented as boxes
in the Figure), and processes (represented as arrows
and their annotations in the Figure). The following
components are introduced:
L represents the language that is used to encode
the model. This can be, for instance, a version of
PDDL. In this context, the language is expected to
have a well-defined syntax, vocabulary, and oper-
ational semantics: this means that, independent of
planning engine and application domain, there is a de-
fined process for executing plans which correspond to
sequences of actions in the application domain. In
other words, there exists a single interpretation of the
dynamics of a well-formed knowledge model (Mc-
Cluskey, 2002).
D is the domain specification, a set of require-
ments for the application domain at hand. Such re-
quirements can be described informally in diagrams
and textual documents, or described (at least in part)
in a formal language. The requirements specification
would include information about the dynamics of the
domain, the kind of problems the planning engine will
have to solve, and the kind of plans (solutions) that
need to be provided as output.
M represents the model externalisation in a lan-
guage L, that is, a formal specification of the appli-
cation domain part of the requirements specification.
This represents entities invariant over every problem
instance, such as object classes, functions, properties
and relations; a specification of domain dynamics;
and a specification of problem instances that has to
be reasoned upon by the planning engine. In other
words, this is what we refer to above as the knowl-
edge model, around which the quality framework sits.
I is the interpretation of the domain requirements
D, that is, the internal specification of either a human
(expert) or of an automated technique, that results in
the generation of the model M, in the selected lan-
guage L. In other words, it can be described as the
understanding that the interpreter has of the domain
requirements. As it is apparent, the internal spec-
ification can vary significantly among experts and,
as well, among different automated encoding tech-
niques, which may rely on very different technologies
in order to be able to provide a complete model exter-
nalisation.
K represents the relevant explicit current knowl-
edge that is available to the human expert or the au-
tomated technique and that affects the interpretation
I. Such knowledge should can encoded in a formal
or semi-formal way, so that it can be exploited by
any interpreter wishing to. This may include, for ex-
ample, incomplete models previously generated, or
textbook knowledge about the dynamics of the do-
main, or heuristics to be used in the planning engine.
It is worth emphasising that this knowledge is not a
model externalisation, but it should be understood as
a source of knowledge on which an agent relies to cre-
ate the externalisation.
A Quality Framework for Automated Planning Knowledge Models
637
Domain
D
Interpretation
I
Model
Externalisation
M
Engine
E
Plan
(Solution)
P
Language
L
Articulation
Execution
Activation
Reflection
Evolution
Changes
Current
Knowledge
K
Figure 1: The proposed quality framework for planning models. Boxes are used to represent components, while processes are
represented as arrows linking the involved components.
E is the set of rules and techniques exploited by a
planning engine in order to generate, given the model
externalisation of the domain and of a problem, a so-
lution plan P. In fact, E is not to be considered as
an actual planning engine, rather it should be the de-
scription and specification of the engine, and how it
will operate on the provided models. It can be, for in-
stance, under the form of pseudo-code, specifying the
steps (pre-processing, search, optimisation) and their
behaviour.
Finally, P stands for the solution plans that can
be obtained, using the engine E on the model exter-
nalisation M. P has a twofold meaning in this con-
text: it can represent a specific plan, in terms of set
of actions to be performed in order to reach the goal
of a given planning problem model, but it can also
indicate –through a specifically-designed language or
formalism– the characteristics of the plans that can be
generated.
The framework depicted in Figure 1 includes also
the notion of processes. Processes represent interac-
tions between components, that lead to changes in
one (or more) of the involved components. In our
framework, processes have been named following, to
some extent, the existing nomenclature proposed in
(Krogstie et al., 2006), appropriately extended and
modified for the sake of dealing with planning domain
and problem models.
Articulation (D → I → M) is the process where
the domain D is encoded as a model M by means of
a specific language L. The articulation is performed
by an interpreter, on the basis of her interpretation I
of the domain, and of the available knowledge K. No
assumptions are made on the nature of the interpreter:
the role can be played by a human expert, by an auto-
mated technique, or by a mix of those. Similarly, no
assumptions are made on the nature of the interpre-
tation I; this can be fully formal (i.e., a model itself
but in a different formalism) or natural language, or
sketches, etc. Notably, this process can be repeated
if the interpreter is changed, or the interpretation I is
updated. This can be the result of improvements in
the current knowledge K or, for instance, because of
a better understanding of the specifications.
The Reflection process stands for the impact that a
language L has on the model externalisation, as well
as on the planning engine E. The impact on the model
is extremely intuitive: different languages provide
different expressive power, and different ways for for-
malising the relevant specification requirements of the
domain. In some versions of PDDL, for instance, it is
not possible to specify the duration of an action. Fur-
thermore, the language has also a strong impact on the
planning engine, as different engines support different
languages, or different subsets of the language’s fea-
tures. Therefore, the selection of the language leads
to the possibility (or not) of using some planning tech-
niques. Furthermore, similar dynamics can be differ-
ently encoded in different languages, with a poten-
tially different impact on the performance of planning
engines.
Execution (M → E → P) is the process of generat-
ing solution plans, by providing as input to the plan-
ning engine E the model externalisation M. As afore-
mentioned, P can therefore represent a single solution
plan, or can be specified in terms of characteristics of
plans that can be generated via the execution process.
Activation (P → D) captures the changes that the
use of the model may trigger in the domain specifi-
cation D. Changes can include, for instance, the re-
finement of the domain specification on the grounds
of some unexpected results. The work of Vaquero
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
638

et al (Vaquero et al., 2013a) on post-design analysis
falls into this category, where using the model in plan-
ning may lead to the discovery of missing require-
ments and hence lead to changes in D. Differently
from interactive and business process models, plan-
ning knowledge models are activated indirectly, via
solutions P. Therefore the activation is usually less
frequent in planning, and it tends to point to changes
in the domain that are due to the exploitation of the
automated planning technology in the application do-
main, that may allow to perform actions in a different
way. In a given domain, for instance, the use of plan-
ning may allow to perform more complex tasks, that
were previously impossible to perform. This can then
be reflected in changes in the domain specification.
Finally, there are two processes that, respectively,
affect the domain D and the model externalisation M,
only. The changes process incorporates changes to
the specification. This can be the case, for instance, of
a logistic company that decides to extended its trans-
port fleet by including different kind of vehicles. That
would change the domain specification, and would
then need to be reflected in the model. The evolu-
tion process focuses on the evolution of the model M.
Evolution can be due to the use of reformulation tech-
niques, that change the model externalisation in order
to improve the performance of the engine E. In fact,
this process is only aimed at capturing the modifica-
tions that are made on a model M to make it more
amenable to engines, or easier to read for human ex-
perts.
4 QUALITY CONCEPTS
Previous work in the area of knowledge engineering,
and particularly knowledge capture, for AI planning
seems to point to the direction of a single general
quality notion - that of Semantic Quality (McCluskey
et al., 2017; McCluskey, 2002). However, as pointed
out by the strand of research based on the SEQUAL
framework (Lindland et al., 1994), that general qual-
ity notion cannot be directly evaluated nor measured.
It is therefore pivotal to introduce different quality di-
mensions, that should include aspects and elements
that can, in principle, be measured and analysed. An
in-depth explanation of quality aspects for conceptual
models is provided in (Krogstie et al., 1995). Remark-
ably, quality levels are defined following the levels
of the semiotic ladder (Stamper, 1996). The semiotic
ladder introduced six levels, corresponding to differ-
ent dimensions (either related to the IT platform or to
the human society) allowing to describe the properties
of ’signs’ –in a broader semiotic sense.
In the following we specialise the main quality
types in order to fit the needs of planning knowledge
models, and expected users and knowledge engineers.
Noteworthy, due to the inner aims of planning knowl-
edge models –that are not mainly focused on com-
municating knowledge, but on allowing the genera-
tion of solution plans–, we have to introduce qual-
ity aspects that are not covered in the semiotic lad-
der, and to drop some aspects that are not relevant
for the purposes of planning. Quality aspects separate
the goals, which represent what this aspect is trying
to assess and maximise, from the means for achiev-
ing such goals. In other words, the quality aspects are
related to the components (from the proposed frame-
work) that are involved in the assessment. There is not
a one-to-one connection between the processes pre-
sented in the previous section, and the quality aspects.
The processes are designed to represent interactions
between components, and have to be supported in or-
der to make sure that the delivered changes are benefi-
cial for the involved components; in that, they are in-
directly affecting the different quality aspects. How-
ever, the notion of quality is inevitably entangled with
the actual components, because components are the
tangible outcome of the processes.
Physical Quality: this aspect focuses on the availabil-
ity and accessibility of the model M. Following the
existing literature, this quality has two main goals,
the externalisation and the internalisability. The for-
mer refers to the fact that the model M is an artefact,
resulting from the externalisation (in other words,
of making explicit) of the interpretation knowledge
I of an interpreter, and is based also on the avail-
able current knowledge K. Externalisation also cov-
ers the fact that the considered application domain
can be represented under the form of some symbolic
model, specifically using available planning-oriented
languages. The internalisability stands for the fact
that the model M is persistent and available to inter-
preters that can understand it and interpret it, and can
be used by an appropriate engine E to generate solu-
tions. In other words, the internalisability focuses on
the fact that the model is available for the planning
engine, as well as to experts that may need to check
or revise it. At a first glance this may seem trivial in
the typical planning settings, particularly for the do-
main model part of the knowledge model. However,
in terms of problem instances, it may be the case that
such problems are automatically generated by com-
bining information gathered from different sources
(sensors, data bases, etc.), and the process may be
hard to reproduce. This is the case for many plan-
ning applications (see, e.g. (Venturelli et al., 2017)).
In such scenarios, Internalisability aims also at max-
A Quality Framework for Automated Planning Knowledge Models
639

imising the availability of planning knowledge mod-
els, so that future validations and evaluations can be
performed.
Syntactic Quality: is probably the easiest quality as-
pect that can be measured and assessed, as it is aimed
at the syntactic correctness of the model M with re-
gards to the selected modelling language L. It is im-
portant to remark that planning engines E may add
additional constraints on the syntax of the language,
due to partial support of some language features, for
instance. The planning engine cannot be selected in
isolation: the language and the planning engine are af-
fecting each other and, of course, decisions taken with
regards to E and L have repercussions on the rest of
the modelling process. For this reason, it is necessary
to include the engine in the analysis of the syntactic
quality.
Semantic Quality: aims at the goals of accuracy and
completeness. In this context, we rely on the defi-
nitions provided in (McCluskey et al., 2017). In a
nutshell, accuracy is focused on relating the model M
and the domain specification D, by ensuring that M
is a valid representation of the specification, i.e. it
encodes all the aspects that are correct and relevant
for the domain. Conversely, completeness involves
the solution plans P in that it means that M enables
the generation of all (and only) solution plans that are
correct with regards to the domain specification D.
Pragmatic Quality: this covers how the model exter-
nalisation is activated, i.e. the way in which the ex-
ploitation of the model, maybe within a larger frame-
work, can affect the domain specification and, in a
broader sense, the application domain itself. In prin-
ciple, activation and articulation can be seen as a
co-design cycle, where feedback drives the improve-
ment of the overall understanding of the domain and
its specification; and as the model externalisation is
evolved and refined, this has potential impacts on the
efficiency of the planning engine, on the interpreta-
tion, and on current knowledge. To some extent, prag-
matic quality is driven by the comprehension of the
domain specification, and of the model, by the differ-
ent stakeholders.
Operational Quality: this quality covers the ability
of the selected planning engine E to reason upon the
model externalisation M to generate P. This quality
aspect incorporates two perspectives. First, the shape
of solution plans that E allows to generate. On this
matter there may be preferences in terms of number of
actions involved, or makespan, or cost of the actions
that are considered. It may also be the case that, for
the specific application domain, only optimal solution
plans are acceptable. Second, the resource bounds
that can be used by E to solve a problem instance.
In this context, acceptable resource bounds can be de-
fined in terms of runtime, memory usage, number of
CPUs, etc. Resource bounds can be specified in the
domain specification D, or may be derived by the in-
terpretation I, or by the current shared knowledge.
5 EVALUATION OF TOOL
SUPPORT ENVIRONMENTS
The proposed quality framework can provide a valu-
able means for relating existing environments with the
process they are aimed to support, and to the qual-
ity aspects a specific tool can contribute to. Here we
consider a range of knowledge engineering tools en-
vironments for planning, focusing on those that lead
to the generation of PDDL models. This appears to
be a timely exercise, as the last edition of the Inter-
national Competition on Knowledge Engineering for
Planning and Scheduling (Chrpa et al., 2017) high-
lighted that most teams did not use any knowledge
engineering tool (except text editors), and thus relied
only on their expertise. Some teams were not aware
of the existence of such tools support.
We selected four tools environments, aiming at
including very different approaches and techniques.
The first two tools are well-cited early examples, and
the second two are more recently produced environ-
ments.
• GIPO: The Graphical Interface for Planning with
Objects (Simpson et al., 2007) is based on users
encoding in object-centred languages OCL and
the HTN variant OCL
h
, with a translation to
PDDL in the background. These formal lan-
guages exploit the idea that a set of possible states
of objects are defined first, before action (oper-
ator) definition. This allows the integration of a
number of tools covering automated domain ac-
quisition, consistency checking and plan anima-
tion.
• itSIMPLE (Vaquero et al., 2013b) provides a
graphical environment that enables knowledge en-
gineers to encode knowledge of the domain by us-
ing the Unified Modelling Language (UML). Ob-
ject classes, predicates, action schema are mod-
elled by UML diagrams allowing users to visu-
ally inspect knowledge models. itSIMPLE incor-
porates a model checking tool based on Petri Nets
that are used to check invariants or analyse dy-
namic aspects of the knowledge models. Standard
planning engines are integrated for dynamic test-
ing.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
640
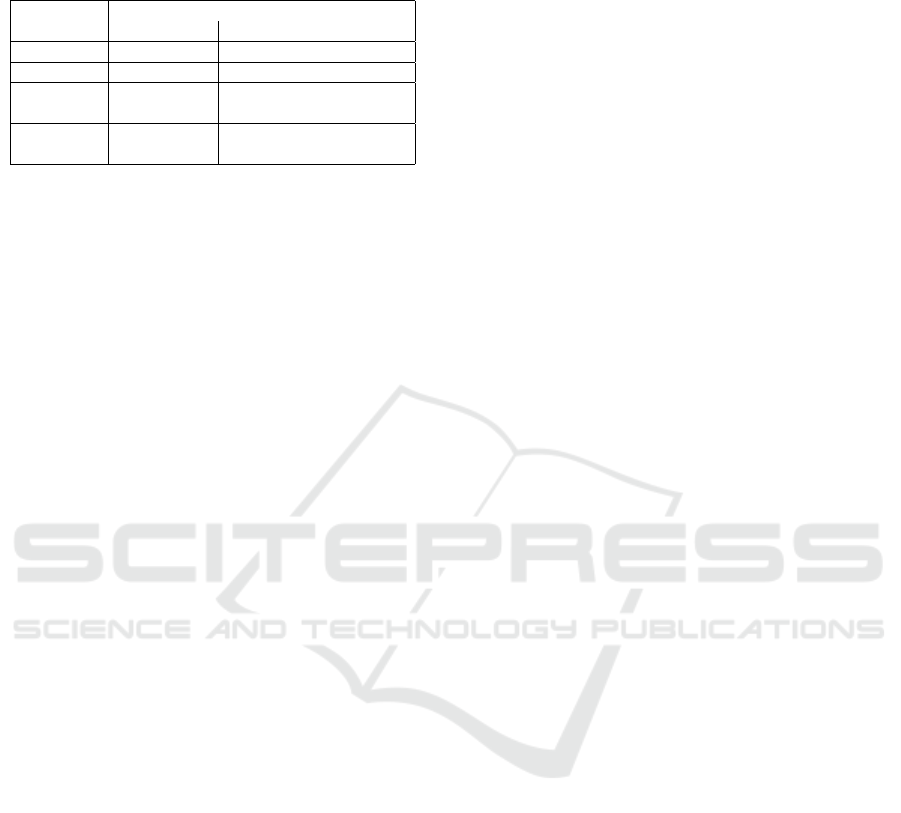
Table 1: Fully and partially supported processes by the con-
sidered Knowledge Engineering tools for automated plan-
ning.
Supported Processes
Tool Fully Partially
GIPO Articulation Execution, Changes
KEWI Articulation Changes
itSIMPLE Articulation
Execution, Activation,
Evolution, Changes
VS-studio –
Articulation, Execution,
Evolution
• KEWI (Wickler et al., 2014) is a tool for encod-
ing planning knowledge collaboratively by do-
main and planning experts, in a high level lan-
guage called AIS-DDL, originally for use within
Industrial Drilling domains. It features a domain
expert-friendly set of tools for verification and
validation, based around a layered domain ontol-
ogy.
• VS-studio (Long et al., 2018). There is a
class of PDDL editors that provide a range
of different ways for supporting the knowl-
edge encoding process, such as syntax highlight,
auto-completion, plan visualisation, etc. This
class includes tools such as PDDL studio (Plch
et al., 2012), planning.domains, and more re-
cently VS-studio (and its integration with the
planning.domains editor). For the sake of read-
ability, we will focus on VS-studio, as its set of
functionalities appears to subsume the functional-
ities of the other members of the class.
In terms of the various kinds of Quality Concepts dis-
cussed above, all the environments aim to assist in
physical and syntactical qualities. The first three en-
vironments employ a user-oriented language (OCL
h
,
UML, AIS-DDL respectively) to act as an intermedi-
ary language between domain requirements and ex-
ternalisation, which enhances support for semantic
quality. On the other hand, the planning engines that
they are connected to are not fully integrated (in part,
this is so the environments can be flexible in enabling
users to embed a choice of planners). The VS-studio
environment, however, is aimed at supporting opera-
tional quality, with its planning engine embedded cen-
trally, and its focus on dynamic testing. In the follow-
ing, we analyse the considered tools with regards to
the support they provide for each of the processes de-
scribed in the quality framework. Table 1 shows an
overview of the analysis. Tools are partially support-
ing processes if they provide means to support some
aspects of the considered process, but not the whole
process.
With regards to Articulation, all the considered
tools support it. itSIMPLE, GIPO, and KEWI pro-
vide high level, structured languages that can be used
to represent the knowledge about the domain, from
which the model externalisation M can be generated
(automatically or semi-automatically). In that, these
tools support both the steps of the overall Articula-
tion process: from the domain D to the interpretation
I, and from I to a model M. VS-studio instead sup-
ports, in a very thorough way, only the last step of
the process. No support is provided for obtaining the
interpretation, but the tool includes a wide range of
techniques for supporting the generation of the model
M, and for making sure that it is syntactically correct.
Reflection is not appropriately supported by any of
the tools. Either they translate domain knowledge to
a single version of the PDDL language, or they do not
provide means for measuring the impact of different
languages L on the model externalisation M and on
the engine(s) E. As a matter of fact, the ability of hu-
man experts to select the best language L (or version
of the language) that is sufficiently expressive for en-
coding the model externalisation M, and to select the
most appropriate planning engine(s), is still somewhat
of an art. This indicates the need for an extension to
the tools which feature high level input languages, to
facilitate Reflection.
The Execution process is partially supported by
most of the tools. VS-studio incorporates a single pre-
defined planning engine, but provides a remarkable
interface for the visualisation and analysis of the gen-
erated plans P and of the way in which the planning
engine has explored the search space. There are also
means for testing the shape of plans, and for generat-
ing test sets of problems, which characteristics can be
specified in a meta language. itSIMPLE incorporates
a wide range of planning engines, but provides a lim-
ited support for analysing and comparing plans gen-
erated by the different engines, or for compare the en-
gines’ performance. GIPO incorporates a plan anima-
tor that is used to view and query object state changes
over plan execution.
Activation is partially supported by the latest ver-
sion of itSIMPLE, only. By including a dedicated
module (Vaquero et al., 2013a), itSIMPLE supports
the post-design analysis of the model externalisation
M, and of the plans P. Such analysis allows to identify,
among other model-specific issues, missing require-
ments in the domain, for instance. In fact, it would
be more precise to state that the analysis is done with
regards to the interpretation I: however, changes in
the interpretation can then be reflected in the domain
requirements.
itSIMPLE, GIPO and KEWI support Changes
partially, in the sense that their high level interfaces
are built to support maintenance throughout opera-
A Quality Framework for Automated Planning Knowledge Models
641

tion, with the engineer changing the high level lan-
guage, and the new externalisation being automati-
cally generated. For example, in the case of GIPO, the
diagrams defining object classes can be edited, and
updated PDDL will be generated automatically.
The Evolution process is partially supported by
itSIMPLE via the previously mentioned post-design
analysis module. Such analysis my lead to the iden-
tification of aspects of M that can be represented in a
different way. Evolution is partially supported also by
VS-studio: the environment provides the means for
making sure that changes made in part of the knowl-
edge models are correctly reflected in problem in-
stances.
All the environments provide some limited sup-
port for encoding additional knowledge K. Users of
KEWI encode a dedicated domain-specific ontology
and a corresponding set of relations. With VS-studio
the user can encode in a pre-defined programming
language the characteristics of instances to be solved,
and the expected properties of solutions P. Both GIPO
and itSIMPLE allow the user to encode axioms, al-
though their purpose is for static domain analysis
rather than for influencing the interpretation function
and hence the externalisation. VS-studio provides a
mean for encoding some additional knowledge that
could be exploited for testing purposes, and for the
automated population of planning problems.
Summarising, the knowledge engineering envi-
ronments sampled provide support for engineering
automated planning knowledge models in major as-
pect such as actualisation, but have major gaps as
highlighted by the application of the framework.
6 BENEFITS AND DISCUSSION
This section provides an overview of potential bene-
fits that the use of the proposed framework can bring
to the AI planning field and, to some extent, to the
more general AI area.
Use of an Over-arching Framework and Terminol-
ogy. The main benefit of the framework presented
is to replace disparate notions of quality with a con-
nected, composite and over-arching notion, that can
be used within all work relating to this endeavour.
Embedding automated planning, and in particular au-
tomated planning engines, within applications soft-
ware, is becoming more widespread, as evidenced in
part by the growth of applications papers and rele-
vant workshops in academic conferences. This points
to the immediate need for a general framework for
considering the quality of the various components in-
volved in the life cycle of the planning knowledge
model. Applications papers tend to take an ad hoc ap-
proach to analysing such issues, but a framework such
as the one proposed would lead to more structured and
rationalised experience reports about applied AI plan-
ning. While we have shown how the framework can
be used to evaluate tools environments, it would also
help clear up ambiguous or vague terminology in cur-
rent use –a prime example being the term “domain”
itself. This term is sometimes used to mean the model
M, and sometimes used to mean domain specification
D. Clarifying terminology at the very least would im-
prove communication within development processes,
as well as the clearer communication of research.
Insights from Previous Framework Research. The
research surrounding the foundations of the SEQUAL
framework can be used to provide insights into plan-
ning developments using the proposed quality frame-
work. For example, the modelling process should ter-
minate not when the model is perfect, i.e. when se-
mantic quality goals such as accuracy and complete-
ness are satisfied, but when the model has reached a
state where further modelling is less beneficial than
exploiting it (Krogstie et al., 1995). Feasibility in-
troduces a trade-off between the benefits and the re-
quired resources for achieving a given overall quality
of the knowledge model. Benefits and reasonable re-
source bounds are themselves part of the specification
of the domain D, as they are a key component of the
modelling process. In that, the “right” feasible quality
of a planning knowledge model has to be decided via
a domain-specific analysis, and can not be generalised
over different domains and scenarios.
Casting Previous Work into a Wider Framework.
As remarked above, work addressing quality in the
automated planning area has largely addressed se-
mantic quality, motivated by software engineering
concerns about the verification and validation of a
completed system, as well as knowledge engineer-
ing concerns about accuracy and completeness of the
knowledge model (Biundo et al., 2003). Taking ac-
tion model learning as an example, there has been
much work in developing machine learning proce-
dures which learn parts of the knowledge model, e.g.
(Zhuo et al., 2010). In order to evaluate the qual-
ity of these learning procedures, it is natural to want
to measure the quality of what is learned –such as
by comparing the learned knowledge with what has
been hand crafted (evaluating physical and semantic
quality), or by checking that the new knowledge can
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
642

be used by a planner (evaluating operational quality).
Similarly, we can classify the type of learning by its
inputs, such as training examples taken from the do-
main specification D. In this way, the activity of using
machine learning to learn parts of the model external-
isation M can be cast within the Framework to clarify
quality goals and classifications of procedure, leading
to a sounder footing for the evaluation of such domain
model learning techniques.
Generalisation to Other Areas of Automated Rea-
soning. It may be argued that the introduced frame-
work, as well as some of the peculiarities of plan-
ning knowledge models described in the correspond-
ing section, are shared by other approaches for au-
tomated reasoning. This is, to some extent, cor-
rect. Answer Set Programming (ASP) and Satisfiabil-
ity (SAT) components can be seen as components of
larger frameworks, potentially providing support and
automated reasoning capabilities to autonomous sys-
tems. However, a significant difference lies in the fact
that in areas such as ASP and SAT, there is less em-
phasis on the shape of generated solutions. In fact,
ASP solvers are usually bounded to return all the pos-
sible solutions. In SAT, instead, it is important to
show that there exists a solution, or to demonstrate
that a formula is unsatisfiable. Sub-areas of SAT, such
as MaxSAT, can accommodate preferences about the
structure of solutions, but solvers tend to be more fo-
cused on optimality –by including preferences in the
overall quality of generated solutions. From a lan-
guage perspective, both SAT and ASP show a smaller
degree of variability than planning: the selection of
the language is therefore much easier and less im-
portant for the overall modelling process. Therefore,
components such as P, and L are less relevant for the
ASP and SAT modelling process.
7 CONCLUSIONS AND FUTURE
WORK
The engineering of automated planning applications
–and in particular the knowledge model– is of great
importance as research advancements lead to applica-
tions, particularly in autonomous systems. To support
this, a deeper understanding of quality in the devel-
opment process needs to be derived. Utilising gen-
eral frameworks for conceptual modelling, we have
introduced a quality framework for use in viewing the
development of the knowledge model in automated
planning. This links previously distinct research ef-
forts in areas such as post-design analysis, automated
model acquisition, model debugging, and tool devel-
opment.
We have shown how past research in this area can
be given a more holistic setting within this frame-
work, and have exploited the framework for assess-
ing the support provided by existing knowledge engi-
neering tools for automated planning, and, finally, we
pointed out a list of potential benefits to the planning
community. The results of the performed analysis,
beside demonstrating the usefulness of the introduced
framework, confirms the lack of support for engineer-
ing automated planning knowledge models of state-
of-the-art tools and indicates the areas where further
work is needed. For instance, the analysis put a spot-
light on the lack of support for the Reflection process,
and on the limited ability of existing tools in support-
ing the encoding of additional knowledge that is not
strictly part of the models.
For future work, we are interested in synthesising
metrics that can be used for quantitatively evaluating
processes and components of the quality framework,
and to develop approaches that, by leveraging on the
introduced processes and quality concepts, can help
in addressing robustness issues of planning engines
(Vallati and Chrpa, 2019).
REFERENCES
Biundo, S., Aylett, R., Beetz, M., Borrajo, D., Cesta, A.,
Grant, T., McCluskey, T., Milani, A., and Verfaillie,
G. (2003). PLANET roadmap. http://www. planet-
noe.org/service/Resources/Roadmap/Roadmap2.pdf.
Chrpa, L., McCluskey, T. L., Vallati, M., and Vaquero, T.
(2017). The fifth international competition on knowl-
edge engineering for planning and scheduling: Sum-
mary and trends. AI Magazine, 38(1):104–106.
Frank, J. (2013). The challenges of verification and valida-
tion of automated planning systems. Proceedings of
ASE, page 2.
Ghallab, M., Nau, D., and Traverso, P. (2004). Automated
Planning: Theory & Practice. Morgan Kaufmann.
Krogstie, J. (2012). Quality of business process models. In
The Practice of Enterprise Modeling - 5th IFIP WG
8.1 Working Conference (PoEM), pages 76–90.
Krogstie, J. (2013). A semiotic approach to data quality. In
Proceedings of the International Conference on En-
terprise, Business-Process and Information Systems
Modeling (BPMDS/EMMSAD), pages 395–410.
Krogstie, J. and de Flon Arnesen, S. (2004). Assessing
enterprise modeling languages using a generic qual-
ity framework. Information modeling methods and
methodologies, (1537-9299):63–79.
Krogstie, J. and Jørgensen, H. D. (2002). Quality of in-
teractive models. In Advanced Conceptual Modeling
Techniques, ER 2002 Workshops: ECDM, pages 351–
363.
A Quality Framework for Automated Planning Knowledge Models
643

Krogstie, J., Lindland, O. I., and Sindre, G. (1995). Defin-
ing quality aspects for conceptual models. In Proc. of
ISCO, pages 216–231.
Krogstie, J., Sindre, G., and Jørgensen, H. D. (2006). Pro-
cess models representing knowledge for action: a re-
vised quality framework. European Journal of Infor-
mation Systems, 15(1):91–102.
Lindland, O. I., Sindre, G., and Sølvberg, A. (1994). Under-
standing quality in conceptual modeling. IEEE Soft-
ware, 11(2):42–49.
Long, D., Dolejsi, J., and Fox, M. (2018). Building Support
for PDDL as a Modelling Tool. In Proc. of KEPS.
McCluskey, T. L. (2002). Knowledge Engineering: Issues
for the AI Planning Community. In Proc. of (KEPS).
McCluskey, T. L., Vaquero, T. S., and Vallati, M. (2017).
Engineering knowledge for automated planning: To-
wards a notion of quality. In Proc. of K-CAP, pages
14:1–14:8.
Plch, T., Chomut, M., Brom, C., and Bart
´
ak, R. (2012). In-
spect, edit and debug PDDL documents: Simply and
efficiently with PDDL studio. In Proc of ICAPS.
Simpson, R. M., Kitchin, D. E., and McCluskey, T. L.
(2007). Planning domain definition using gipo. The
Knowledge Engineering Review, 22(2):117–134.
Stamper, R. (1996). Signs, information, norms and systems.
Signs of work.
Vallati, M. and Chrpa, L. (2019). On the robustness of
domain-independent planning engines: The impact
of poorly-engineered knowledge. In Proceedings of
the 10th International Conference on Knowledge Cap-
ture, K-CAP, pages 197–204.
Vallati, M. and Kitchin, D. E., editors (2020). Knowledge
Engineering Tools and Techniques for AI Planning.
Springer.
Vaquero, T., Silva, J., and Beck, J. (2013a). Post-design
analysis for building and refining ai planning systems.
Eng. App. of AI, (26(8)):1967–1979.
Vaquero, T. S., Silva, J. R., Tonidandel, F., and Beck, J. C.
(2013b). itsimple: towards an integrated design sys-
tem for real planning applications. Knowl. Eng. Rev.,
28(2):215–230.
Venturelli, D., Do, M., Rieffel, E. G., and Frank, J. (2017).
Temporal planning for compilation of quantum ap-
proximate optimization circuits. In Proc. of IJCAI.
Wegner, P. and Goldin, D. (1999). Interaction as a frame-
work for modeling. In Conceptual Modeling: Current
Issues and Future Directions, pages 243–257.
Wickler, G., Chrpa, L., and McCluskey, T. L. (2014). Kewi:
A knowledge engineering tool for modelling ai plan-
ning tasks. In Proc. of KEOD.
Zhuo, H. H., Yang, Q., Hu, D. H., and Li, L. (2010). Learn-
ing complex action models with quantifiers and logi-
cal implications. Artificial Intelligence, 174(18):1540
– 1569.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
644
