
Adaptive Planning Method for Operations of a Multi-satellite Swarm
for Earth Remote Sensing in Real Time
Petr Skobelev
1a
, Elena Simonova
2b
, Vladimir Galuzin
3c
, Anastasiya Galitskaya
4d
and Vitaly Travin
4e
1
Samara Federal Research Scientific Center RAS, Institute for the Control of Complex Systems RAS, Sadovaya Str., 61,
443020, Samara, Russia
2
Samara National Research University, Moskovskoye Shosse, 34, 443086, Samara, Russia
3
Samara State Technical University, Molodogvardeyskaya Str., 244, 443100, Samara, Russia
4
SEC «Smart Solutions», Moskovskoye Shosse, Office 1201, 17, 443013, Samara, Russia
travin@smartsolutions-123.ru
Keywords: Small Spacecraft, Ground Stations, Space System, Observation Objects, Multi-agent Technologies,
Adaptive Planning.
Abstract: The paper describes a method for adaptive planning of imaging operations for a multi-satellite swarm in real
time, based on a multi-agent approach. The key object in this approach is the intelligent agent of an application
for imaging of the observation object. Its goal is the most advantageous placement in the schedule. The
solution to the optimization problem is obtained as a result of reaching an equilibrium point in multiple
negotiations between agents through mutual compromises and concessions. The paper provides a brief
problem statement of planning the operation of a multi-satellite swarm for Earth remote sensing (ERS).
Furthermore, it describes the developed method, which makes it possible to process applications for imaging
observation objects in real time. The paper also presents results of experimental studies that demonstrate
efficiency of the developed multi-agent method in solving this problem versus traditional approaches. Finally,
prospects for further development and practical application of the presented method are discussed.
1 INTRODUCTION
Development of a method for adaptive planning for
multi-satellite swarms of small spacecrafts for remote
sensing of the Earth (ERS) in real time is primarily
relevant now due to the developing trend in the space
industry aimed at creating, deploying and operating
space systems (SS), including a multi-satellite (more
than 100 spacecrafts) swarm of low-orbit satellites
and a distributed network of ground stations for
receiving information (GS). The purpose of creating
such space systems is to meet the existing needs for
remote sensing data, which are used in various fields:
agriculture, geological and hydrological research, the
military sphere, elimination of consequences of
a
https://orcid.org/0000-0003-2199-9557
b
https://orcid.org/0000-0003-2638-2572
c
https://orcid.org/0000-0002-1460-613X
d
https://orcid.org/0000-0002-7752-4262
e
https://orcid.org/0000-0003-4084-418X
natural disasters, creating plans for certain territories,
etc. (Shimoda, 2016).
Examples of such systems are the Planet Labs
project with its satellite swarm of more than 200
operating Dove (Flock) satellites and 13 SkySat sub-
meter satellites, and the BlackSky Global project, the
orbital swarm of which consists of 60 Earth remote
sensing satellites (Kopacz, 2020).
The consequence of such an increase in
dimension and performance of the orbital swarm is
the growth of requirements for algorithms and
planning systems. Thus, for a SS consisting of dozens
of satellites and GS, it may be required to draw up a
plan of thousands of points for observations objects
(OO) on a significant horizon, and the time for
48
Skobelev, P., Simonova, E., Galuzin, V., Galitskaya, A. and Travin, V.
Adaptive Planning Method for Operations of a Multi-satellite Swarm for Earth Remote Sensing in Real Time.
DOI: 10.5220/0010215400480057
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 1, pages 48-57
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

placing new applications for imaging should be
measured in minutes from the moment of their arrival.
The use of traditional systems for managing SS,
which are based only on the ground control loop and
traditional planning methods, together with multi-
satellite orbital swarms will lead to conflict situations
when several small satellites simultaneously claim to
perform imaging of the same OO, or to transmit data
to the same GS (Karsaev, 2016). Increased
requirements for operational efficiency of processing
the applications for imaging propels implementation
of a dynamic adaptive adjustment of the SS work
schedule as new applications enter the system or in
case of unpredictable events associated with
equipment failure or rapidly changing meteorological
conditions.
One of the possible ways to overcome the above
limitations inherent in traditional scheduling
algorithms is the extended use of multi-agent
technology (Rzevski, 2014), on the basis of which the
method described in this paper has been developed.
Their application at the moment has already proven
itself in various industrial solutions (Gorodetsky,
2020). Multi-agent technology makes it possible to
flexibly and adaptively synthesize a schedule in real
time, taking into account individual characteristics of
orders and resources. Besides, the underlying actor
computation model makes it possible to create high-
performance, distributed, fault-tolerant solutions,
which all together helps more efficiently manage SS
resources in comparison with traditional methods.
The paper is structured as follows. The second
chapter provides a brief problem statement for
planning operations of a multi-satellite ERS group.
The third chapter describes the current state of
research and development on this problem. The
fourth chapter describes the data model used with
description of the main classes, the fifth chapter
considers the developed method of adaptive planning.
The sixth chapter describes the carried out
experimental studies. Finally, the seventh chapter
summarizes the main results and discusses the
prospects for development and application of the
solution.
2 PROBLEM STATEMENT
The task of planning operations for a multi-satellite
ERS swarm can be presented as follows. Let there be
a simplified model of a spacecraft, which is a
combination of two segments: a space complex and a
ground-based special complex. The space complex
performs the functions of receiving and transmitting
information, the ground-based special complex - the
functions of receiving and processing the transmitted
information.
The space complex consists of a set of satellites S
= {s
i
},i=1,. Each spacecraft s
i
is characterized by a
set of orbital elements and parameters of onboard
equipment. In its turn, the ground complex is
represented by a set of GS
,1,
. Each
station is characterized by its geographic location
and parameters of installed antenna. For GS and
satellites, restrictions may be indicated in the form of
a work schedule and unavailability intervals.
The space system must ensure fulfillment of a set
of applications for imaging point and area observation
objects
,1, . For the imaging
application o
p
, its priority pr
p
can be specified (an
application with a low priority should not interfere
with the optimal location of a higher-priority
application) and a set of restrictions: the point in time
until which it is necessary to obtain images
, the
balance coefficient between efficiency and quality of
the information received c
p
(set in the range from 0 to
1), the minimum and desired linear resolution of the
resulting image minR
p
and maxR
p
. Each application
for imaging o
p
, depending on its type, corresponds to
one or more areas of surveying
,1,
(Figure 1).
Figure 1: Imaging areas for point and area OO.
In the considered SS model, the satellite performs
two operations:
imaging a certain area sa
j
imaging
j
, characterized
by the execution interval
;
and the roll angle of the
satellite sAngle
j
;
conducting a communication session of the
satellite with the GS for transmitting the received
data to the Earth drop
j
, characterized by the
execution interval
;
.
Adaptive Planning Method for Operations of a Multi-satellite Swarm for Earth Remote Sensing in Real Time
49

GS, in turn, performs one operation - receiving
data from the satellite receiv
j
, characterized by the
execution interval
;
.
To implement ERS satellite imagery based on
applications from customers, it is required to form a
comprehensive plan for performing operations for a
given planning horizon, drawn up in accordance with
the criterion of minimizing the time for delivering
images, as well as maximizing their quality. Thus, the
objective function (OF) of the system is:
∑
→
,
(1)
1
→,
(2)
,
,
,
where – is the objective function of the system,
is the objective function of the k-th task,
N is the number of planned imaging sessions,
– evaluation of the efficiency criterion of
receiving data for the k-th task,
– evaluation of the quality criterion of the
resulting image for the k-th task,
,
– the planning horizon for the k-th task,
– the actual linear resolution of the resulting
image for the k-th task.
In this case, a number of restrictions are imposed
on the resulting solution:
1) fulfillment of the observability condition between
the small satellite and the OO during imaging;
2) radio visibility between the small satellite and the
GSwhen transmitting the imaging results;
3) availability of free space in the on-board memory
of the satellite;
4) fulfillment of condition for prioritizing
applications;
5) consistency of the sequence of times of
operations;
6) satellite and GScan simultaneously perform no
more than one operation.
In addition, it is necessary to carry out adaptive
rebuilding of the locally optimal operating plan of the
satellite with dynamic appearance of events that
change the initial data for planning, such as changes
in the composition and characteristics of the satellite
elements (events of adding/removing the satellite and
GS, changes in the available volume of satellite
memory, adding/deleting work schedules and
intervals of inaccessibility of satellite and GS, etc.),
changes in the composition and parameters of
applications for imaging of point and area objects.
3 OVERVIEW OF REFERENCES
As a solution to the problem of planning operations
for orbital swarms, various heuristic algorithms are
proposed, which have been previously tested on
classical tasks of resource planning and allocation.
Thus, the paper (Wang, 2016) describes application
of the linear integer programming method for
planning imaging of OO by a satellite group, taking
into account possible cloudiness, modeled as
stochastic events. The authors transform the random
constraint programming model into a linear integer
programming model using the sample approximation
method. Then a search for solution is carried out
using the developed branching and cutting algorithm
based on generation of "lazy" calculations.
Another approach to solving this problem is given
in (Iacopino, 2014). The authors suggest using an ant
algorithm based on the model of behavior of ants
looking for the shortest path from the colony to the
food source.
Application of a multi-agent approach to planning
the work of a swarm of ERS satellites is considered
in (Bonnet, 2015). Advantages of self-adaptation and
self-organization are given as prerequisites for
application of the multi-agent approach for solving
this problem, in relation to multi-criteria problems of
large dimensions, requiring dynamic adaptation of the
plan in case of abnormal events.
The work (Xiaolu, 2017) is devoted to solution of
the subproblem of planning the operation of a satellite
with several degrees of freedom using the method of
local search in an expandable neighborhood. Planning
of satellite communication sessions based on the
methods of simulating annealing and search for
options with restrictions is described in (Karapetyan,
2015). The use of a genetic algorithm for planning
imaging of area objects by an ERS satellite swarm is
considered in (Niu, 2018).
Besides, autonomous planning on board the
satellite, which is the subject of papers (Gorodetsky,
2017) and (Lenzen, 2014), can also be singled out as
a promising area of research. However, these studies
are mostly theoretical in their nature. For their
practical implementation, it is necessary to solve a
number of fundamental problems.
The review has shown that the currently available
methods of scheduling the work of orbital swarms are
mainly of a centralized, hierarchical and monolithic
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
50
nature, which greatly complicates flexible adaptation
of the schedule in the rapidly changing conditions of
the target environment. Moreover, these methods are
based not on traditional mathematical optimization
methods, the use of which leads to an avalanche
increase in the volume of calculations, but on various
kinds of heuristics for reducing exhaustive search.
Meanwhile, other methods and algorithms are
beginning to appear, which take into account domain
semantics, analyzing conflicts, non-deterministic
behavior, self-organization, adaptation, and working
in real time. However, there are yet no descriptions of
integral solutions to the problem of increasing
efficiency of managing large-scale orbital swarms of
small spacecrafts, suitable for practical digital
implementation.
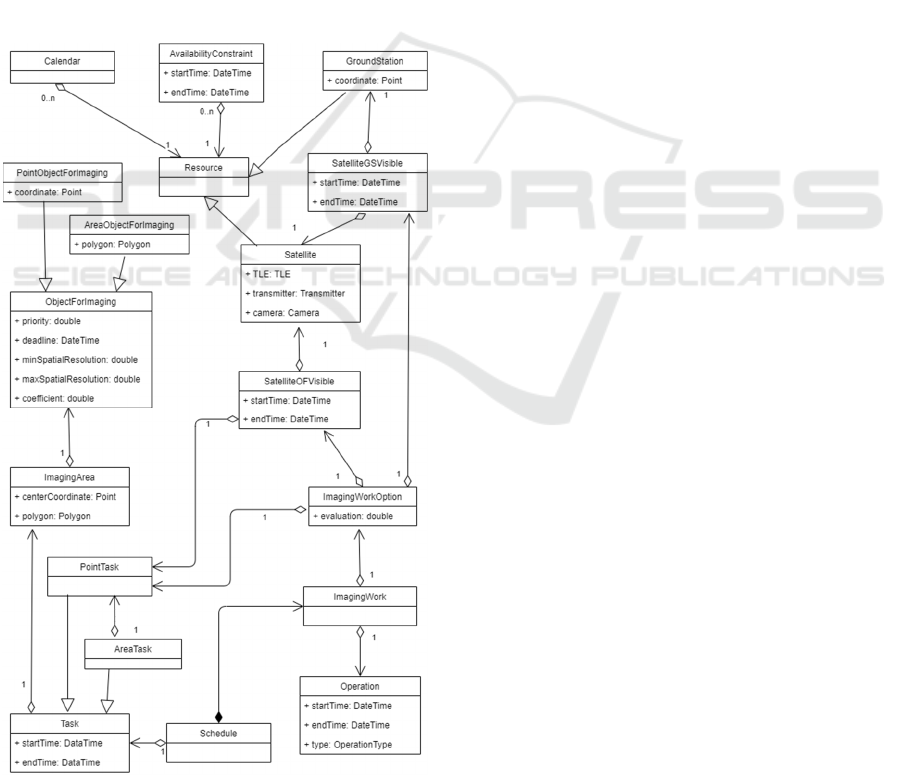
4 DATA MODEL
Figure 2: Data model.
The developed method uses a data model, the
structure of which is shown in Figure 2 in the form of
a class diagram in UML notation.
The Resource class describes some abstract
resource, and its time of use must be scheduled. The
spacecraft (Satellite) and GS (GroundStation) act as
resources. For a resource, limitations can be set in the
form of schedules (Calendar) and intervals of
unavailability (AvailabilityConstraint).
The ObjectForImaging class is an abstract
observation object that needs to be captured. The
point OO corresponds to the PointObjectForImaging
class, and the area OO corresponds to the
AreaObjectForImaging. An imaging area
(ImagingArea) is created for each OO.
The Task class is a task that needs to be scheduled.
A task for imaging an area object (AreaTask) is a set
of tasks for imaging point objects (PointTask).
For each task for imaging a point object,
placement options (ImagingWorkOption) are formed,
which are a combination of the satellite-observation
object visibility (SatelliteOOVisible) and the satellite-
ground station visibility (SatelliteGSVisible), as well
as the OF value (2). During the planning process, one
of the placement options is selected for the task, on
the basis of which the ImagingWork is created. The
imaging job consists of three operations (Operation):
imaging, transmitting the data (drop) and receiving
the data. A Schedule is used to store all planned
imaging jobs.
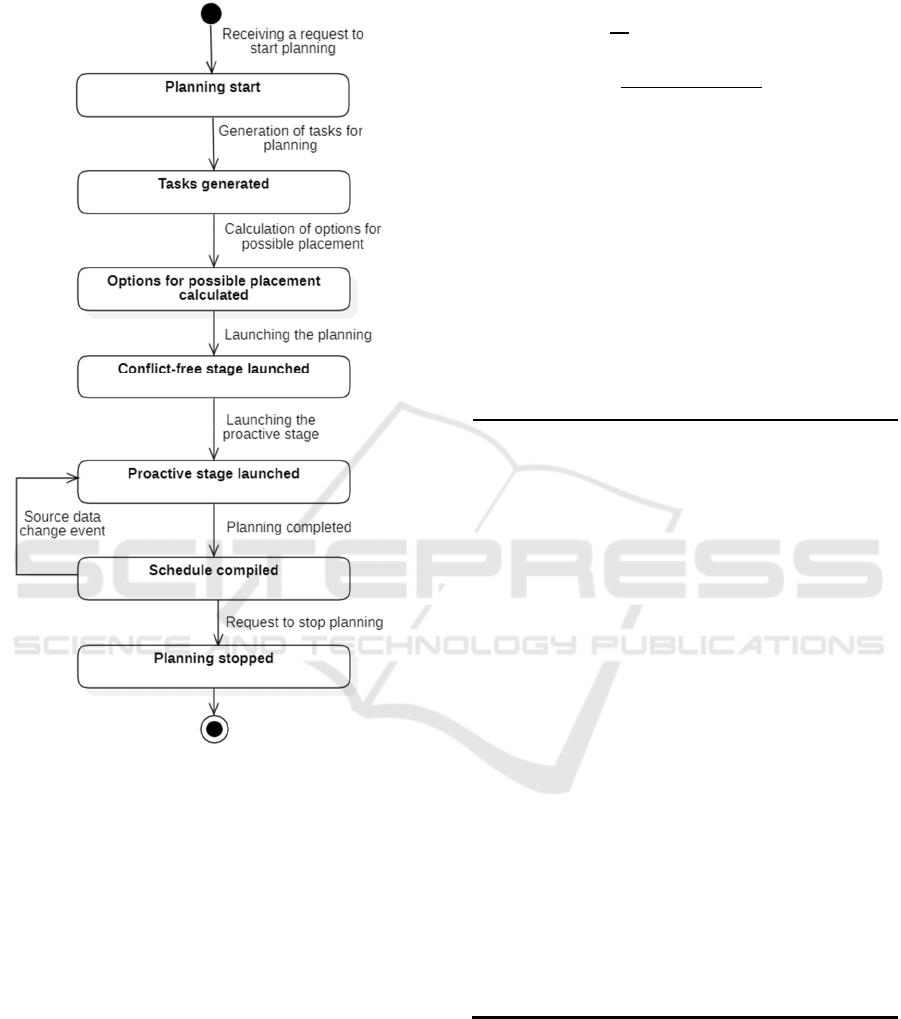
5 ADAPTIVE PLANNING
METHOD
Figure 3 shows the state diagram of the adaptive
planning method, which includes the following main
stages:
1) generation of tasks for imaging of OO;
2) calculation of options for possible placement;
3) conflict-free planning;
4) proactive planning.
5.1 Generation of Tasks for OO
Imaging
At the first stage, tasks are generated for OO imaging
based on the received applications. At the same time,
depending on the type of OO, one or more imaging
areas are created. Thus, an application for imaging a
point OO is associated with one imaging area
containing this object, and for an application for
Adaptive Planning Method for Operations of a Multi-satellite Swarm for Earth Remote Sensing in Real Time
51
imaging an area object, it is divided into a set of
adjacent areas, each corresponding to a point OO.
Figure 3: State diagram of the adaptive planning method.
For each task, the deadlines are set in which it
must be completed. The start time is the beginning of
the planning horizon, and the end time is selected as
the smallest of the two values: the end of the planning
horizon or the point in time until which it is necessary
to receive images, if it is specified in the application.
5.2 Calculation of Possible Placement
Options
At the next stage, for each task, calculation of
possible placement options is carried out,
implemented on the basis of the method of successive
concessions between criteria for efficiency and
quality of received data, set by the coefficient c
p
. The
efficiency criterion has been chosen as the main one.
Based on formula (2), the endpoint (boundary time)
for transmitting the imaging results x is calculated by
formula (3).
1
1
1
,
(3)
where х is the endpoint for transmitting the imaging
results,
r
p
is the current linear image resolution,
is the current drop time.
The pseudocode for the algorithm is shown in
Algorithm 1.
Algorithm 1: Calculation of options for possible placement
of the task.
Input: task
j
, sa
j
, SGSV – set of visibilities between the
satellite and GS, SOSV
j
– set of visibilities between the
satellite and sa
j
Output: IWO
j
– set of placement options for task
j
1:
sort(SGSV, ‘startTime’, ‘asc’)
2:
sort(SOSV
j
, ‘startTime’, ‘asc’)
3:
x = task
j
.endTime
4:
IWO
j
= []
5:
bestEvaluation = 0
6:
do
7:
sgsv
k
= SGSV.next()
8:
if sgsv
k
.startTime <= x
9:
do
10:
sosv
p
= SOSV
j
.next()
11:
if sosv
p
.endTime <= sgsv
k
.startTime
12:
iwo = createIWO(task
j
, sgsv
k
, sosvp)
13:
IWO
j
add iwo
14:
while SOSV
j
.hasNext() and sosv
p
.endTime
<= sgsv
k
.startTime
15:
sort(IWO
j
, ‘evaluation’, ‘desc’)
16:
firstIWO = IWO
j
[0]
17:
if firstIWO.evaluation > bestEvaluation
18:
bestEvaluation = firstIWO.evaluation
19:
x = calcBoundary(task
j
, firstIWO)
20:
while SGSV.hasNext() and
sgsv
k
.startTime <= x
21:
return IWO
j
Let us take a closer look at the operation of this
algorithm. The input of the algorithm is the following:
task
j
, for which it is necessary to calculate the options
for possible placement, the imaging area sa
j
corresponding to this task, as well as the pre-
calculated satellite-OO visibility SOSV
j
and satellite-
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
52

GS visibility SGSV. At the beginning of the
algorithm, the visibilities SOSV
j
and SGSV are sorted
in ascending order of the start time of the
corresponding interval (lines 1-2). The time limit for
resetting the imaging results x is taken equal to the
end time of scheduling the task task
j
.endTime (line 3).
Next, sequential enumeration of the satellite-GS
visibility SGSV is performed until the start time of the
next visibility period sgsv
k
.startTime exceeds the
current boundary time x (lines 6-20). At each
iteration, the satellite-GS visibility SGSV and the
previous satellite-OO visibility SOSV
j
are combined,
and a placement option iwo is formed based on the
pair sgsv
k
and sosv
p
(lines 9-14). At the end of each
iteration, the system checks that the evaluation of the
newly found variants does not exceed the current
bestEvaluation (line 17). If so, the boundary time is
recalculated to reset the imaging results x, and
bestEvaluation takes on the new best value (lines 18-
19).
In the course of the algorithm, a sequence of
possible placement options for the problem
,1,
is built, at the beginning of which
there is a placement option located at the global
optimum OF
k
of the problem’s OF (2).
5.3 Conflict-free Planning
At the stage of conflict-free planning, an initial
feasible schedule is constructed using a greedy
optimization algorithm. The solution obtained at this
stage will show the main bottlenecks of the
considered schedule and will become a reference
point for further improvements.
The pseudocode for the algorithm is shown in
Algorithm 2. At the beginning, the list of tasks is
ordered and grouped by the value of the pr
p
priority
(lines 1-2), thereby enforcing the constraint that a
lower priority task cannot interfere with placement of
a higher priority one. Then, sequentially for each
group of tasks, an attempt for placement is made
(lines 4-11), during which the tasks are placed on the
first available option from the set IWO
j
, where there
are no conflicts with other tasks. Meanwhile, a set of
planned jobs
,1,
is formed.
5.4 Proactive Planning
At the stage of proactive planning, using a multi-
agent algorithm, the schedule obtained in the previous
step is optimized by resolving conflicts between tasks
that arise during placement.
Algorithm 2: Conflict-free planning algorithm.
Input: tasks, IWO is set of possible placement options
for the problem
Output: IW is set of planned jobs
1:
groupedTasks = group(tasks, ‘priority’)
2:
sort(groupedTasks, ‘priority’, ‘desc’)
3:
IW = []
4:
for taskGroup in groupedTasks
5:
parallel for task
j
in taskGroup
6:
IWO
j
= IWO[task
j
]
7:
for iwo
k
in IWO
j
8:
conflicts = findConflicts(iwo
k
)
9:
if conflicts.empty
10:
iw = createImagingWork(iwo
k
, task
j
)
11:
IW.add(iw)
12:
return IW
In the developed method, there are two types of
agents: a task agent, the purpose of which is to occupy
the most advantageous option in the schedule, and a
scene agent, designed to control the activity of task
agents and interact with external systems. The task
agent is responsible for performing permutations in
the schedule and has the satisfaction function SF (4)
(Rzevski, 2020), determining the evaluation of the
current satisfaction of its requirements:
1
,
(4)
where SF
k
is the agent's satisfaction function,
is the placement option located at the global
optimum point of the task’s OF,
iw
k
is the current job on OO imaging.
Before starting the planning process, a smart
agent is created for each task. Planning is controlled
by the scene agent, which acts in accordance with
Algorithm 3.
This algorithm works as follows. The launch of
agents for proactivity is carried out iteratively, and
before the start of each iteration, the system checks
for new events changing the initial data (line 2). If
there are such events, the planning context is updated
by applying the events to the current initial data (line
3). Then the list of all taskAgents received as input is
placed in a queue which is sorted in ascending order
by the value of the agent satisfaction function (lines
4-5). Thus, at the very beginning of the queue there
are those agents that are either the most unsatisfied
with their position in the schedule, or not scheduled
at all. Task agents are sequentially retrieved from the
queue (line 9), and if the agent is not completely
satisfied with its current position in the schedule (the
value of its satisfaction function SF (4) is less than 1)
(line 10), then a signal about the beginning of
Adaptive Planning Method for Operations of a Multi-satellite Swarm for Earth Remote Sensing in Real Time
53

proactivity is sent to it (line 11). After receiving a
message with results of proactivity, if the proactivity
ended successfully, evaluations of all tasks affected
by this proactivity are recalculated and the order of
tasks in the queue is updated (lines 12-14). The
condition for completing proactive planning is the
absence of permutations of task agents at the next
planning iteration, which means reaching an
equilibrium point during negotiations and the
possibility of issuing a ready-made solution (line 15).
Algorithm 3: Proactive planning algorithm.
Input: taskAgents, N – maximum number of
simultaneously active task agents
Output: Optimized schedule
1:
do
2:
if events of changes in the source data
3:
update planning context
4:
tasksQueue = new Queue(taskAgents)
5:
sort(tasksQueue, ‘elevation, ‘asc’)
6:
while !tasksQueue.isEmpty
7:
if number of active agents >= N
8:
waiting for the end of the proactivity of one
of the agents
9:
taskAgent = tasksQueue.poll()
10:
if taskAgent.satisfaction < 1
11:
sceneAgent.sendMessage(taskAgent,
“Start proactivity”) .then(proactiveResult
=>
12:
if proactiveResult.isSuccessful
13:
updateEvaluation(
proactiveResult.changedTasks)
14:
sort(tasksQueue, ‘elevation’,
‘asc’))
15:
while there were relocations in the schedule
Upon receiving a signal about the beginning of
proactivity, the task agent attempts to find a more
advantageous placement option for it according to
Algorithm 4. To do this, it sequentially searches
through possible placement options which are better
than the current one (lines 2-16). At each search
iteration, the agent first calculates the maximum
possible compensation for displacement
compensation, which it can provide to task agents
conflicting for placement (line 4). This compensation
is calculated according to the formula (5). It then
searches for placement conflicts (line 6) and, if any,
attempts to resolve them using the computed
compensation (lines 7-12). In this case, each agent of
the conflicting task is sequentially sent a message
with a request to find other allocation intervals
(line 10). The latter, in turn, upon receipt of this
message, makes an attempt to find a new placement
option using the compensation provided by
Algorithm 4. If the attempt to resolve the conflict is
successful and the agent of the conflicting task is
ready to move, the compensation required by this
agent is deducted from the total compensation, the
conflict is marked as resolved and is removed from
the general list of conflicts (lines 11-13). Otherwise,
it proceeds to the next possible placement. After all
conflicts are resolved, based on this placement option,
an imaging job is created and added to the schedule
instead of the previous one (lines 14-16).
∆
(5)
where ∆ is the increment of the agent's satisfaction
function,
is the current job on OO imaging,
is the new job on OO imaging.
Algorithm 4: Proactivity of the task agent.
Input: taskAgent
j
, IWO
j
, iw
j
Output: ıw
the new task for imaging task
j
1:
сompensation = 1
2:
while IWO
j
.hasNext() and
compensation > 0
3:
iwo
k
=
IWO
j
.next()
4:
compensation = iwo
k
.evaluation -
iw
j
.evaluation
5:
if compensation > 0
6:
conflicts = findConflicts(iwo
k
)
7:
while conflicts.hasNext() and
compensation > 0
8:
conflict = conflicts.next()
9:
conflictingTaskAgent = conflict
.conflictingTaskAgent
10:
response = taskAgent
j
.sendMessage(
conflictingTaskAgent, “Find other
allocation intervals”, compensation)
11:
if response.message == “Found”
12:
compensation -=
response.compensation
13:
conflicts.remove(conf
p
)
14:
if conflicts.empty
15:
sw
= createImagingWork(iwo
k
,
task
j
)
16:
addToSchedule(ıw
)
17:
return ıw
When new events changing the initial planning
data are received, the proactive phase is launched
again and dynamic adaptation of the schedule is
performed in accordance with the changes that have
occurred.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
54
6 EXPERIMENTAL STUDIES
To conduct experimental studies in order to assess
suitability of the proposed method for solving
problems of managing swarms of satellites in real
time, the SS model is used, which includes a group of
30 identical satellites, and a network of 10 GS.
Experiments were carried out on a PC with an
Intel Core i7-3770 CPU (4 cores / 8 threads, 3.4GHz)
and 8GB RAM, running under Windows 10.
6.1 Analysis of the Planning Process
and Its Results
In this study, statistical information was obtained in
order to assess the quality of the schedule and analyze
the process of its construction.
The graphs in Figure 4 show the history of
changes of values of the current and limiting
objective function of the system since the start of
planning, on the basis of which it is possible to
estimate the difference between the current OF
value (1) and its maximum possible value (6).
∑
,
(6)
where limOF is the maximum possible OF of the
system,
M is the total number of tasks,
N is the number of considered tasks,
is the placement option located at the global
optimum point of the OF of the k-th problem.
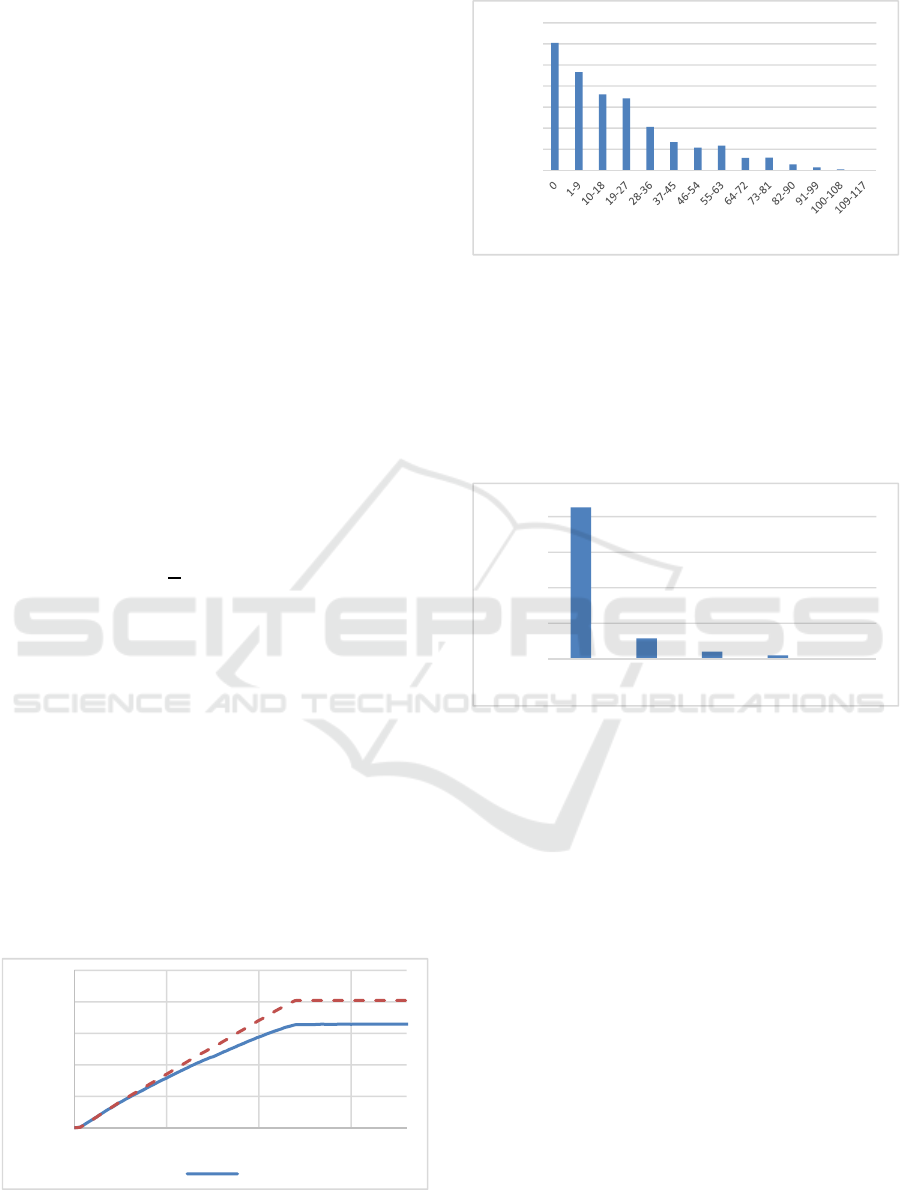
Figure 5 shows a diagram of distribution of the
number of task placement options, which are better
than their current placement. The diagram analysis
shows that about 1200 tasks are scheduled at the most
optimal option for them, and more than half of the
remaining tasks are located in the 30% of the best
options, which indicates a good quality of the
resulting schedule.
Figure 4: Graphs of changes in the value of the current and
limiting OF during planning.
Figure 5: Distribution of the number of task placement
options, which are better than their current placement.
The diagram of distribution of the number of task
permutations at each iteration of proactive planning
(Figure 6) demonstrates its fast convergence – the
number of permutations already at the second
iteration of planning is 7 times less than the number
of permutations at the first iteration.
Figure 6: Number of task permutations at each iteration of
proactive planning.
6.2 Studying the Method’s Capability
of Adapting the Schedule
In this study, capability of the method to adapt the
schedule damaged by failure of one of the satellites
has been evaluated. The time spent on rescheduling
and the quality of the resulting schedule are the
studied parameters. A series of 10 experiments was
carried out, during which it was initially planned to
execute 3000 applications for OO imaging, generated
randomly according to a uniform distribution law.
After all applications were successfully placed in the
schedule, one of the satellites was excluded from the
system, and the time spent on rebuilding the schedule,
changes in the value of the system OF (1) and changes
in the number of planned applications were measured.
Results of the experiment are presented in Table 1.
0,0
0,2
0,4
0,6
0,8
1,0
050100150
Objectivefunctionvalue
Time,sec
CurrentOF
0
200
400
600
800
1000
1200
1400
Numberoftasks
Numberofoptions
0
50
100
150
200
12345
Numberofpermutations
Iteration
Adaptive Planning Method for Operations of a Multi-satellite Swarm for Earth Remote Sensing in Real Time
55
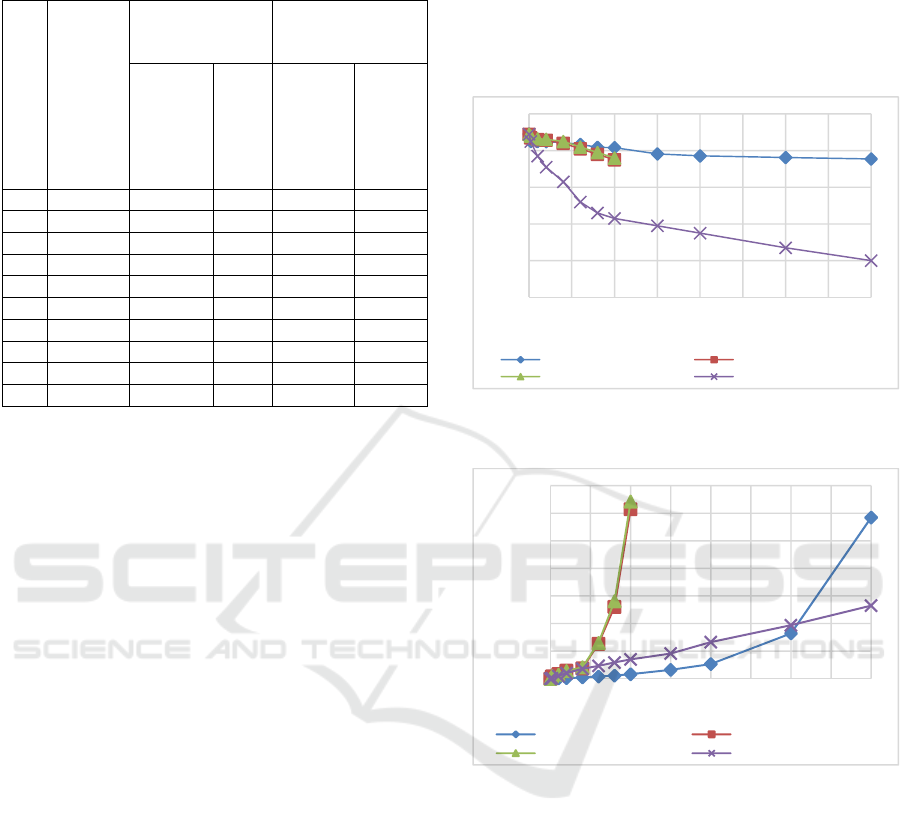
Table 1: Results of experiments to study the system’s
ability to adapt the schedule.
№
Resche
duling
time, s
After failure of a
satellite
After
reconstruction of
schedule
Number
of
planned
applicati
ons
ΔOF
Number
of
resched
uled
applicat
ions
ΔOF
1 9 422 -0,11 418 0,07
2 8 379 -0,10 371 0,04
3 10 468 -0,11 465 0,08
4 11 411 -0,10 406 0,07
5 9 407 -0,11 396 0,06
6 10 425 -0,11 422 0,09
7 7 397 -0,11 395 0,06
8 8 388 -0,10 376 0,05
9 8 377 -0,07 372 0,05
10 9 419 -0,10 417 0,06
Thus, failure of one of the satellites led to a sharp
drop in the system’s OF by an average of 0.1 and the
need to search for new placement options for 409
applications. During rescheduling to other satellites,
403 applications were rescheduled, which is 98% of
the number of applications planned for the removed
satellite. As a result of schedule reconstruction, OF
increased to 0.69, which is less than the initial value
by only 0.04. The average rescheduling time was
about 9 seconds. Thus, the use of a multi-agent
approach in planning makes it possible to quickly
parry external events leading to a change in
conditions of the problem being solved.
6.3 Efficiency Analysis versus Planning
Algorithms based on Traditional
Optimization Methods
In this study, efficiency of the developed method has
been analyzed in comparison with planning
algorithms based on traditional optimization
methods, such as the simulated annealing algorithm,
the Late Acceptance Hill Climbing algorithm and the
Tabu Search algorithm. These were compared in
terms of the quality of the resulting schedule and the
time required for its compilation.
Within this series of experiments, the number of
applications for OO imaging varied from 100 to
20,000. The time spent on compiling the plan and the
system OF (1) were measured.
Based on results of these experiments, graphs of
dependence of OF (Figure 7) and planning time
(Figure 8) on the number of applications for various
planning algorithms were built. For the simulated
annealing algorithm and the Tabu Search algorithm,
results were received only up to 5000 applications for
imaging, because after that, an exponential increase
in the time of work and consumed resources was
observed.
Figure 7: Graph of dependence of OF on the number of
applications.
Figure 8: Graph of dependence of planning time on the
number of applications.
Results of these experiments show that the
proposed multi-agent method is not inferior to
traditional heuristic algorithms for low-
dimensionality problems, and with an increase in the
number of planned applications, it demonstrates a
higher speed of scheduling without losing the quality.
7 CONCLUSIONS
The authors of the paper propose a method for solving
the problem of adaptive planning of operations for a
large-scale orbital swarm of
remote sensing of the
Earth
small satellites on the basis of a multi-agent
approach.
0
0,2
0,4
0,6
0,8
1
0 2500 5000 7500 10000 12500 15000 17500 20000
Objectivefunctionvalue
Numberofapplications
Multi‐agent AnnealingSimulation
TabuSearch LateAcceptanceHillClimbing
00:00:00
00:28:48
00:57:36
01:26:24
01:55:12
02:24:00
02:52:48
03:21:36
0 2500 5000 7500 10000 12500 15000 17500 20000
Operatingtime
Numberofapplications
Multi‐agent AnnealingSimulation
TabuSearch LateAcceptanceHillClimbing
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
56

Experimental studies have demonstrated high
suitability of the method for increasing efficiency of
using resources of the new generation satellites.
Further research will focus on improving the
planning algorithms by introducing a virtual
marketplace and adding deeper analysis of the current
planning context to reduce enumeration of options. In
addition, it is planned to introduce the space system
ontology in order to provide a more flexible and
adaptive ability to customize the applied rules. All
these actions will ultimately make it possible to create
a real management system with the ability to service
a large number of small satellites and applications.
ACKNOWLEDGEMENTS
The paper has been prepared based on materials of
scientific research within the subsidized state theme
of the Samara Federal Research Scientific Center
RAS, Institute for Control of Complex Systems RAS
for research and development on the topic: №
AAAA-A19-119030190053-2 “Research and
development of methods and means of analytical
design, computer-based knowledge representation,
computational algorithms and multi-agent technology
in problems of optimizing management processes in
complex systems”.
REFERENCES
Shimoda, H., 2016. Remote Sensing Data Applications. In
Handbook of Satellite Applications, P. 1-70.
Kopacz, J., Herschitz, R., Roney, J., 2020. Small Satellites
an Overview and Assessment. Acta Astronautica. Vol.
170, P. 93-105
Karsaev, O., 2016. A Review of Conventional and
Innovative Satellite Mission Planning Systems. Tr.
SPIIRAN. Issue 48, P. 151-181. (In Russian)
Rzevski, G., Skobelev, P., 2014. Managing complexity.
WIT Press. Boston.
Gorodetsky, V., Skobelev, P., 2020. System engineering
view on multi-agent technology for industrial
applications: barriers and prospects. Cybernetics and
Physics. Vol. 9, No. 1, P. 13-30.
Wang, J., Demeulemeester, E., Qiu, D., 2016. A pure
proactive scheduling algorithm for multiple earth
observation satellites under uncertainties of clouds.
Computers & Operations Research. Vol. 74. P. 1-13
Iacopino, C., Palmer, P., Policella, N., Donati, A., Brewer,
A., 2014. How ants can manage your satellites. Acta
Futura. No. 9, P. 59-70.
Bonnet J., Gleizes M., Kaddoum E., Rainjonneau S.,
Flandin G., 2015. Multi-satellite Mission Planning
Using a Self-Adaptive Multi-agent System. In
Proceedings of the 2015 IEEE 9th International
Conference on Self-Adaptive and Self-Organizing
Systems (SASO ’15). P. 11-20
Xiaolu L., Laporte G., Chen Y., He R., 2017. An adaptive
large neighborhood search metaheuristic for agile
satellite scheduling with time-dependent transition
time. Computers & Operations Research. P. 41-53
Karapetyan D., Minic S., Malladi K.T., Punnen A., 2015.
Satellite downlink scheduling problem: A case study.
Omega. P. 115-123
Niu X., Tang H., Wu L., 2018. Satellite Scheduling of Large
Areal Tasks for Rapid Response to Natural Disaster
Using a Multi-Objective Genetic Algorithm.
International Journal of Disaster Risk Reduction. Vol.
28, P. 813-825
Gorodetsky V., Karsaev O., 2017. Self-organization of
group behavior of a cluster of small satellites of a
distributed observation system. Izvestiya Yuzhnogo
federalnogo universiteta. Tekhnicheskie nauki. No. 2,
P. 234-247 (In Russian)
Lenzen, C., 2014. Onboard Planning and Scheduling
Autonomy within the Scope of the Fire Bird Mission.
Proceedings of the 14-th International Conference on
Space Operations. P. 517-527
Rzevski, G., Skobelev, P., Zhilyaev, A., Lakhin, O.,
Mayorov, I., Simonova, E., 2018. Ontology-Driven
Multi-Agent Engine for Real Time Adaptive
Scheduling. International Conference on Control,
Artificial Intelligence, Robotics & Optimization
(ICCAIRO), P. 14-22
Adaptive Planning Method for Operations of a Multi-satellite Swarm for Earth Remote Sensing in Real Time
57
