
Are Image Patches Beneficial for Initializing Convolutional Neural
Network Models?
Daniel Lehmann and Marc Ebner
Institut f
¨
ur Mathematik und Informatik, Universit
¨
at Greifswald,
Walther-Rathenau-Straße 47, 17489 Greifswald, Germany
Keywords:
Convolutional Neural Network, Neural Network Weight Initialization.
Abstract:
Before a neural network can be trained the network weights have to be initialized somehow. If a model is
trained from scratch, current approaches for weight initialization are based on random values. In this work
we examine another approach to initialize the weights of convolutional neural network models for image
classification. Our approach relies on presetting the weights of convolutional layers based on information given
in the training images. To initialize the weights of convolutional layers we use small patches extracted from the
training images to preset the filters of the convolutional layers. Experiments conducted on the MNIST, CIFAR-
10 and CIFAR-100 dataset show that using image patches for the network initialization performs similar to
state-of-the-art initialization approaches. The advantage is that our approach is more robust with respect to
the learning rate. When a suboptimal value for the learning rate is used for training, our approach performs
slightly better than current approaches. As a result, information given in the training images seems to be useful
for network initialization resulting in a more robust training process.
1 INTRODUCTION
Neural network models are widely used for image
classification. However, training such models from
scratch is a non-trivial task. The goal of training
is to find model weights that result in minimal loss
for the corresponding classification task. Unfortu-
nately, it is not obvious which weight values work
best. We need to find optimal values through iterative
optimization (usually based on stochastic gradient de-
scent). We start with an initial value for each weight
and gradually adjust these values over multiple itera-
tions (Robbins and Monro, 1951; Ruder, 2016). The
crucial steps in this process are: 1) How should we
set the initial weights? 2) How can we update the
weights in each iteration? In this work we focus on
the first question. Ideally, the initial weights should
be set as close as possible to the optimal weights
to avoid a large number of training iterations. This
way we reduce training time and decrease the risk of
getting stuck in local minima or saddle points dur-
ing the training process. But how can we find good
initial weight values when we want to train a model
from scratch? State-of-the-art (SOTA) methods for
initializing model weights are based on random val-
ues (Glorot and Bengio, 2010; He et al., 2015b).
However, SOTA approaches to train a model from
scratch can still take a long time. To speed up train-
ing we may replace certain network layers in a way
that simplifies the training process. Ideally, we do
not want to adjust the weights of these layers at all
or only slightly once they have been set. If this is pos-
sible, then we move towards explainable neural net-
work computation as opposed to black box training.
Model explainability leads to increased trust in the fi-
nal models. This is particularly important for safety-
critical applications (e.g., autonomous driving, medi-
cal applications). Hence, explainability of neural net-
work models is an important area of current research
(Angelov and Soares, 2019; Li et al., 2017; Xie et al.,
2020).
In our work we also take a first step in this direc-
tion. We focus on an alternative approach to initialize
convolutional neural network (CNN) models for im-
age classification. We examine whether it is beneficial
to use information given by the training images to ini-
tialize the network weights. To initialize the weights
of a convolutional layer (ConvLayer) we use small
patches extracted from the training images to preset
each filter of the ConvLayer. Using this approach we
state the following research questions: 1) Does this
approach allow model training or does it destroy the
346
Lehmann, D. and Ebner, M.
Are Image Patches Beneficial for Initializing Convolutional Neural Network Models?.
DOI: 10.5220/0010206603460353
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
346-353
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

training process? 2) If it does allow training, will it
also reach or even surpass the classification accuracy
of models initialized with SOTA initialization meth-
ods? We have found that initializing network weights
using image patches does allow a reasonable training
process. This approach even reaches a similar clas-
sification performance compared to SOTA initializa-
tion methods. Furthermore, we have also observed
that an image patch based weight initialization can
make model training more robust when using subop-
timal training hyper-parameters. The remaining sec-
tions of this work are structured in the following way:
In section 2 we give an overview of current methods
to initialize CNN based models for image classifica-
tion. Our approach is described in section 3. The
experiments that we have conducted as well as their
results are illustrated in section 4. In section 5 we
discuss our findings and conclude our study.
2 RELATED WORK
SOTA initialization approaches to train neural net-
work models from scratch are based on random val-
ues. Xavier and Bengio (Glorot and Bengio, 2010)
introduced Xavier initialization. Xavier picks each
weight value from a uniform distribution within an in-
terval around zero. The bounds of that interval are cal-
culated using the number of incoming and outgoing
connections of the network layer to which the weight
belongs. Xavier and Bengio conducted experiments
on neural networks using hyperbolic tangent and soft-
sign activation functions. He et al. (He et al., 2015b)
introduced Kaiming initialization. Kaiming turned
out to work better for modern neural networks us-
ing ReLU activation functions. To initialize a weight,
Kaiming picks a random value from a normal distri-
bution. The standard deviation of this normal dis-
tribution is determined by the number of incoming
connections of the network layer to which the weight
belongs. The chosen random value is used as the
initial value for that weight. Zhang et al. (Zhang
et al., 2019) introduced Fixup, which is an initializa-
tion method for deep residual networks (ResNet) (He
et al., 2015a). FixUp uses either Xavier or Kaiming
initialization plus a special scaling to set the weights
of the residual branches of the network. This special
scaling is important to prevent exploding gradients
during model training. Thus, Fixup is an alternative to
normalization layers (Ioffe and Szegedy, 2015). How-
ever, in contrast to our approach Xavier, Kaiming and
Fixup rely on random values. They do not use any
information given in the training data to initialize the
network weights as our approach does.
Another approach to initialize a neural network
model is to use the weights of a pre-trained model.
Weights of pre-trained models usually contain useful
information. Pre-trained models are obtained through
transfer learning (Zhuang et al., 2019), unsupervised
learning (Bengio et al., 2007), self-supervised learn-
ing (He et al., 2019; Misra and van der Maaten,
2019) or network pruning (Frankle and Carbin, 2018).
However, in contrast to initializing a model with the
weights of a pre-trained model we focus on weight
initialization to train a model from scratch.
Besides these SOTA approaches, a number of
other approaches to initialize neural network weights
have been proposed. For instance, a method using
sparse weight matrices (Gray et al., 2017), an or-
thogonal matrix initialization (Mishkin and Matas,
2015; Saxe et al., 2013), a method using high-pass
filters for network initialization (Castillo Camacho
and Wang, 2019), an initialization approach based
on meta-learning (Dauphin and Schoenholz, 2019),
a PCA based initialization (Seuret et al., 2017) or
a method using Gabor filters (
¨
Ozbulak and Ekenel,
2018). However, the most similar methods to ours
also follow a data-dependent approach. Kr
¨
ahenb
¨
uhl
et al. (Kr
¨
ahenb
¨
uhl et al., 2015) proposed a method to
initialize the weights using the initial layer activations
of the training images. Koturwar and Merchant (Ko-
turwar and Merchant, 2017) suggested to use training
data statistics for weight initialization. However, in
contrast to our approach both do not use the image
data directly to initialize the weights.
3 METHOD
A CNN consists of a stack of multiple ConvLayers.
Each ConvLayer has several filters which contain the
weights of that layer. Each filter is responsible for de-
tecting a specific kind of feature in the image. Fil-
ters of the lower ConvLayers detect low level fea-
tures, whereas filters of deeper ConvLayers detect
high level features (Zeiler and Fergus, 2013). How
many filters are required for each ConvLayer depends
on the classification problem we try to solve. A fil-
ter is a 3-dimensional tensor that consists of multiple
2-dimensional slices. Each slice corresponds to a cer-
tain channel of either the input image (first layer) or
the layer activations (all remaining layers). If there is
only one channel (e.g., grayscale input image), each
filter will just consist of a single slice (the filter be-
comes 2-dimensional). The filter slices usually have
a size of 3x3, 5x5 or 7x7 (filter size).
To initialize the filters of a ConvLayer, we use
information that is available in the training images.
Are Image Patches Beneficial for Initializing Convolutional Neural Network Models?
347
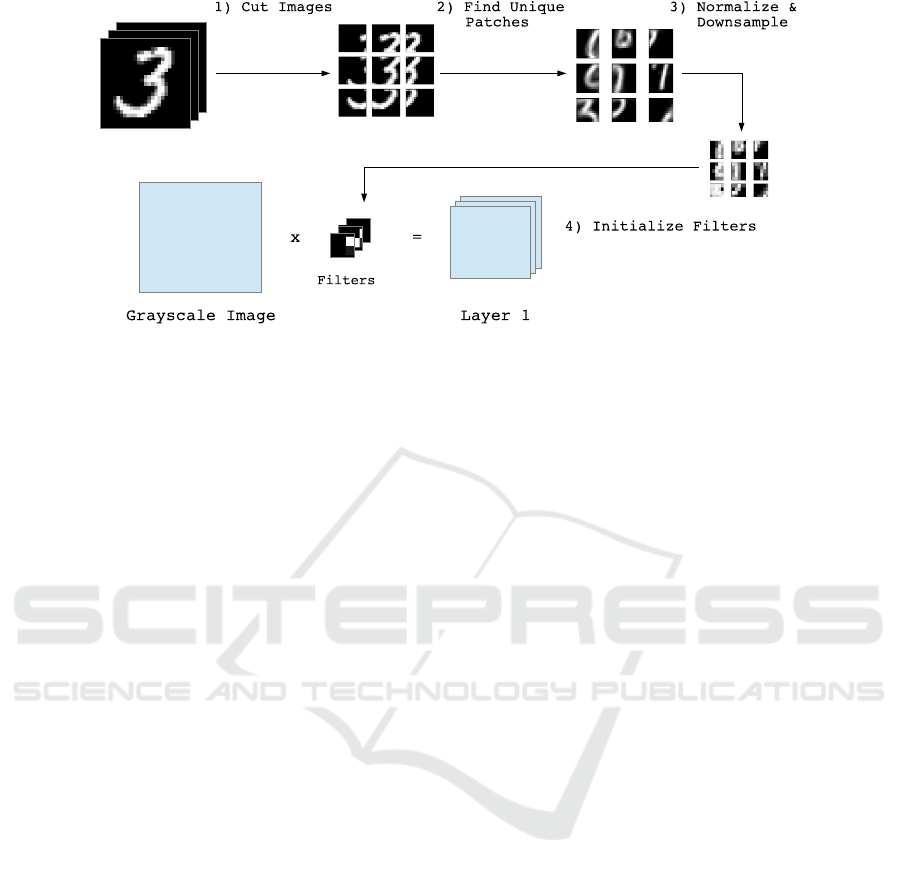
Figure 1: Our approach applied to the filters of the first ConvLayer (MNIST): 1) Cut training images into patches. 2) Find N
unique patches using k-Means (N = number of filters). 3) Normalize and downsample identified patches to the filter size. 4)
Initialize the filters with the patches.
For our initial experiments, we have used grayscale
images of handwritten digits of size 28x28 pixel
from the MNIST dataset (LeCun and Cortes, 1998).
We take the MNIST training images and cut them
into multiple patches of the same size. Neighbor-
ing patches of an image should overlap up to a cer-
tain amount to retain as much information as possible
from each image. We choose one of the MNIST im-
ages to explain how the patches are created for initial-
izing the filters of the first ConvLayer. An intuitive
approach is to cut the MNIST image into patches of
the appropriate filter size (e.g., 5x5). However, our
experiments have shown that cutting the image into
patches bigger than the filter size followed by down-
sampling these patches to the required filter size has
a beneficial effect on model training. For instance,
we choose a patch size of 14x14 pixel with an over-
lap of 7 pixel for neighboring patches. After cutting
the image apart, we obtain 9 of those patches. An il-
lustration of this process is shown in step 1 in figure
1. However, it is possible that some of the patches do
not contain a lot of information. For instance, some of
the MNIST patches might almost only show the black
background of the image. Obviously, such patches
are not useful for model training. Thus, we remove
all patches that contain less than 20 non-black pixels.
All of the remaining patches should have a sufficient
amount of information. These patches should be used
to initialize the filters of the first ConvLayer.
Applying this procedure to all training images
results in an exceedingly large number of patches.
However, the number of filters of the layer is quite
small. If the ConvLayer has 20 filters for instance, we
need to select 20 of those patches to initialize each
of the 20 filters with a patch. Obviously, the chosen
patches should be as unique as possible to avoid ini-
tializing all filters with similar patches. To find unique
patches we use k-Means clustering (Kanungo et al.,
2002). We unroll each 2-dimensional patch to a vec-
tor and stack all of these vectors together resulting in a
matrix of size (number of patches) x (number of patch
pixels). Since it is rather difficult to apply k-Means
to high-dimensional spaces, we use UMAP (McInnes
et al., 2018) to that matrix to reduce its size to (num-
ber of patches) x 2. Finally, we apply k-Means with
k = 20 to identify 20 clusters. Then we take the 10
closest patches from each of the 20 cluster centers,
reshape the pixel values back to two dimensions and
average these 10 patches for each cluster center. This
way we do not rely only on a single image patch but
on a mean image patch for each cluster center. These
mean image patches are used for filter initialization.
Before we can initialize the filters, we need to ap-
ply two additional preprocessing steps to the iden-
tified 20 patches. As a first preprocessing step we
need to normalize each patch to have zero mean. Our
experiments have shown that normalizing patches to
zero mean has a beneficial effect on model training.
This corresponds to SOTA initialization methods us-
ing random values, which also pick initial weight val-
ues from a distribution around zero. In a second
preprocessing step we have to adjust the size of the
patches to the filter size of the ConvLayer. In our ex-
ample we cut an MNIST image into patches of size
14x14 pixel. If the filter size of the first ConvLayer
is 5x5, we need to downsample the patches of size
14x14 to a size of 5x5 pixel. After downsampling,
the patches are ready to be used for initializing the
filters of the ConvLayer. Thus, we stack all created
patches together and use the resulting 3-dimensional
tensor of size 20x5x5 as the initial filter values of the
first ConvLayer. In the same way we can also ini-
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
348

tialize the filter values of the other ConvLayers. After
initialization, we can train the model in the usual way.
Figure 2: Example Patches extracted from CIFAR-10 using
SIFT and k-Means.
For our experiments using color images of size
32x32 pixel of the CIFAR-10 and CIFAR-100 dataset
(Krizhevsky and Hinton, 2009) we have used almost
the same approach as described above. However, we
do not cut the whole image into patches. Instead,
we look for characteristic keypoints in the image us-
ing the SIFT keypoint detector (Lowe, 2004) and cut
out the patches around each detected keypoint (e.g.,
patches of size 15x15 pixel). This way we should only
obtain image patches containing a sufficient amount
of information. Furthermore, due to computational
limitations we use PCA (Pearson, 1901) for dimen-
sionality reduction. Finally, after clustering we only
select the closest patch to each cluster center to avoid
averaging patches containing different backgrounds
which would result into washed out image patches.
4 EXPERIMENTS
4.1 Comparison to the State-of-the-Art
We have conducted an experiment to find out whether
initializing model weights with image patches (as de-
scribed in section 3) is useful at all. In this case
it should be possible to train a model at least for
MNIST. Thus, we have chosen to train such a model
first of all. Furthermore, we have compared the train-
ing process of that model to the training process of
models using the following SOTA approaches: the
original Kaiming initialization using a normal distri-
bution (Kaiming Normal) and a Kaiming initializa-
tion using a uniform distribution (Kaiming Uniform,
which is the standard initialization method in Py-
Torch
1
). As model network architecture we have used
the Caffe LeNet architecture
2
, since it is a standard ar-
1
https://pytorch.org/docs/stable/nn.init.html
2
https://github.com/BVLC/caffe/tree/master/examples/
mnist
chitecture for MNIST. We have initialized the weights
of the first ConvLayer (20 filters, filter size: 5x5)
using image patches as described in section 3. The
weights of the other layers were initialized with the
Kaiming Uniform initialization method (standard Py-
Torch initialization method
1
). For model training we
used the hyper-parameter values of the Caffe LeNet
training (learning rate: 0.01, momentum: 0.9, weight
decay: 0.0005). All training and test images were
normalized before training using the MNIST statis-
tics (mean: 0.1307; std: 0.3081). We have trained
5 models for each initialization approach: our patch
based approach applied to the first ConvLayer, Kaim-
ing Uniform and Kaiming Normal. For each of the
5 models using our approach we have used a differ-
ent seed value to obtain various weight initializations
based on Kaiming Uniform for the other layers be-
sides the first layer. For comparison we have used
the same seed values for the 5 models using Kaim-
ing Uniform and the 5 models using Kaiming Normal.
After each training epoch we recorded the mean and
standard deviation of the obtained accuracies of the 5
models of each approach on the test set. Each model
was trained for 20 epochs. The results of our experi-
ment are illustrated in figure 3 (top left). The obtained
test accuracies of our approach are quite similar to
the accuracies obtained by the models initialized with
Kaiming Uniform and Kaiming Normal after each
training epoch. There is even a slight improvement
of our approach compared to Kaiming Normal.
However, MNIST is a quite simple classification
problem. Thus, we have also tested how initializ-
ing model weights with image patches influences the
training process for the CIFAR-10 dataset in compar-
ison to the FixUp initialization. As model network
architecture we have used the same 20-layer ResNet
(He et al., 2015a) that was also used by Zhang et al.
(Zhang et al., 2019). The network has 268,393 train-
able parameters. We initialized the 16 filters of the
first ConvLayer (filter tensor size: 3x3x3) using im-
age patches as described in section 3. We have cut out
patches of size 15x15x3 pixel around each detected
SIFT keypoint. Then, we have identified 16 unique
patches using k-Means (for the 16 filters of the first
ConvLayer). Finally, the 16 patches were normal-
ized and downsampled to a size of 3x3x3. The result-
ing patches were stacked together to a tensor of size
16x3x3x3. This tensor was used as initial filter tensor
for the first ConvLayer. The weights of the other lay-
ers were initialized with FixUp. For model training
we used the same hyper-parameter values
3
that were
also used by Zhang et al. (Zhang et al., 2019) (initial
learning rate: 0.1, cosine annealing schedule for the
3
https://github.com/hongyi-zhang/Fixup
Are Image Patches Beneficial for Initializing Convolutional Neural Network Models?
349
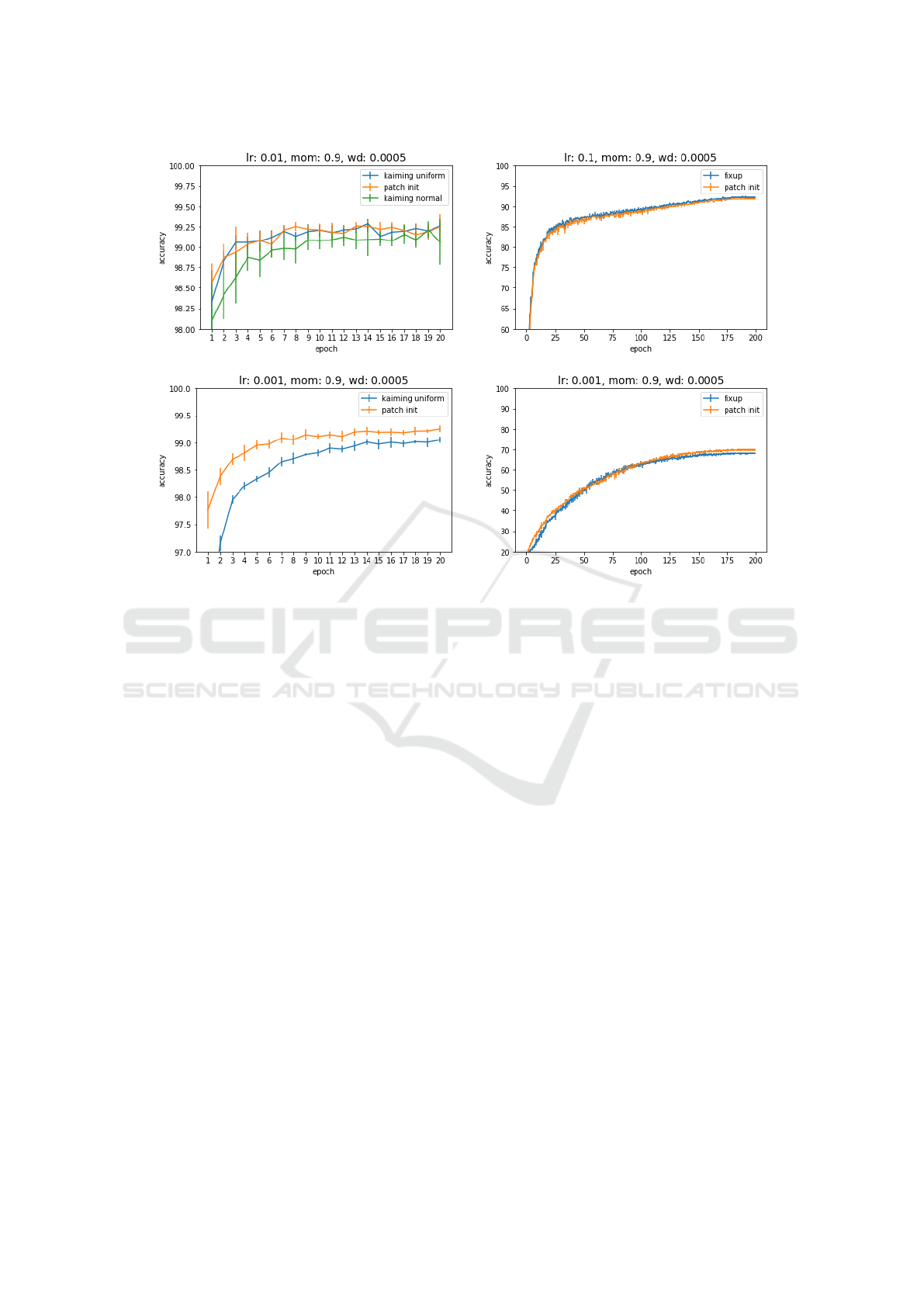
MNIST
MNIST
CIFAR-10
CIFAR-10
Figure 3: Model performance of our approach compared to SOTA initialization for MNIST (left) and CIFAR-10 (right) using
an optimal learning rate (top) and a suboptimal learning rate (bottom). Test accuracies are averaged over 5 models.
learning rate, momentum: 0.9, weight decay: 0.0005,
epochs: 200, data augmentation). All images of the
training and test set were normalized before training
using the CIFAR-10 statistics (mean: 0.4914, 0.4822,
0.4465; std: 0.2023, 0.1994, 0.2010). We have trained
5 models using our initialization approach with a dif-
ferent seed value for each model to obtain various
weight initializations based on FixUp for the other
layers besides the first layer. For comparison, we have
also trained 5 models using the standard FixUp initial-
ization with the same 5 seed values. The results of our
experiment are illustrated in figure 3 (top right). The
results show that our approach reaches similar perfor-
mance to the standard FixUp initialization.
4.2 Influence of Suboptimal
Hyper-parameters
In a second experiment, we have examined the influ-
ence of the learning rate hyper-parameter on model
training using our approach compared to SOTA ini-
tializations. As in section 4.1 we have trained mod-
els from scratch on MNIST using the Caffe LeNet ar-
chitecture first of all. For our approach the patches
have been created and used for the initialization of
the first ConvLayer in the same way as in section 4.1.
Each model has been trained using the same hyper-
parameters, normalization and number of epochs as
in section 4.1 except for the learning rate. In section
4.1 we have used a learning rate of 1e-2. This learning
rate is also used in the Caffe LeNet training configu-
ration. In our second experiment we have changed
the learning rate to a value of 1e-3, 1e-4 and 1e-5 (0.1
was already too high for training). For each of these
learning rate values we have trained 5 models using a)
our approach (using a different random seed value for
each model) and b) Kaiming Uniform (using the same
5 seed values). After each epoch we have recorded
the mean and standard deviation of the 5 test accura-
cies obtained by each initialization method. The re-
sults of the experiment are shown in figure 3 (bottom
left). They show that when we lower the value of the
learning rate, the test accuracies decrease (especially
during the first half of training). This effect is not
surprising, since we do not use a good value for the
learning rate anymore. However, the test accuracies
obtained by our approach have not dropped as much
as the test accuracies of Kaiming Uniform as shown
in the figure. The models initialized by our method
were still able to reach a more or less high test ac-
curacy. In contrast, when we have used the default
learning rate of 1e-2, the test accuracies of the models
using our initialization approach were still similar to
the test accuracies obtained by Kaiming Uniform (see
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
350

section 4.1). Additionally, we have conducted similar
tests using different values for momentum (0.9, 0.8,
0.7, 0.6 and 0.5) and weight decay (5e-5, 5e-4, 5e-
3 and 5e-2). We have reached similar results as for
the learning rate test. However, the gap between the
test accuracies resulting from our approach and the
test accuracies resulting from Kaiming Uniform was
not as high for a suboptimal momentum and weight
decay as it was for a suboptimal learning rate.
Next, we have tested the influence of the learning
rate on model training using our approach compared
to FixUp for the CIFAR-10 dataset. The same model
architecture as well as hyper-parameters as in section
4.1 have been used for model training except for the
learning rate value. As learning rate we have used a
value of 1e-3 instead of 0.1 as in section 4.1. The
results of the experiment are shown in figure 3 (bot-
tom right). They show that our approach performed
slightly better compared to FixUp (averaged over 5
models using different seed values). However, the ef-
fect has not been as strong as for MNIST.
4.3 Initializing Multiple Layers
In our first two experiments (see section 4.1 and sec-
tion 4.2) we have only initialized the filters of the
first ConvLayer using image patches. However, mod-
ern CNNs (e.g., ResNets) consist of a large num-
ber of layers. As a result, the effect of initializing
only the first layer might be rather small. Thus, we
have examined the effect of initializing multiple lay-
ers using image patches on the training process in a
third experiment. First, we have conducted the ex-
periment on MNIST. Since Caffe LeNet has only two
ConvLayers, we initialized both using image patches.
However, initializing both ConvLayers with image
patches made the classification performance slightly
worse compared to only initializing the first Con-
vLayer. Next, we have conducted the experiment on
the CIFAR-10 dataset using the same 20-layer ResNet
architecture
3
as in section 4.1. We have tested 4 cases:
a) initializing only the first ConvLayer using image
patches (as in section 4.1), b) initializing the first Con-
vLayer and the last ConvLayer of the 3rd ResNet
block using image patches (16 filters of tensor size
16x3x3), c) initializing the same layers as in test case
b) and additionally initializing the last ConvLayer of
the 6th ResNet block using image patches (32 filters
of tensor size 32x3x3) and d) initializing the same lay-
ers as in test case c) and additionally initializing the
last ConvLayer of the 9th ResNet block using image
patches (64 filters of tensor size 64x3x3). The patches
have been created and used for ConvLayer initializa-
tion in the same way as in section 4.1. However,
for the ConvLayers other than the first ConvLayer
the patches needed to be reshaped according to the
required filter tensor shape. For model training we
have used the same hyper-parameters, normalization
and number of epochs as in section 4.1 except for the
learning rate. We have examined the training process
using the optimal learning rate of 0.1 and a subopti-
mal learning rate of 1e-3 (as in section 4.2). The re-
sults of our experiment are illustrated in figure 4 (left)
(test accuracies are averaged over 5 models using dif-
ferent seed values). The results show that when using
a suboptimal learning rate the test accuracy increased
the more layers we initialized using image patches.
When using the optimal learning rate the test accu-
racies of the final models were only slightly worse
compared to standard Fixup. However, for test cases
c) and d) the previously optimal learning rate of 0.1
was too high. Hence, model training was not possible
for all seed values in test case c) and d) anymore.
To see whether we really outperformed the stan-
dard FixUp initialization when using a suboptimal
learning rate we have conducted the Stuart Maxwell
significance test between our model of test case b)
and the model trained with standard FixUp initializa-
tion using a suboptimal learning rate of 1e-3. The
Stuart Maxwell significance test is a variation of the
McNemar significance test for classification problems
with more than 2 classes. The McNemar significance
test has been recommended by Dietterich (Dietterich,
1998) to check whether two machine learning mod-
els are significantly different. Our model of test case
b) and the model trained with standard FixUp initial-
ization are significantly different with a probability
of more than 99%. We have also conducted a Stuart
Maxwell significance test between our model of test
case b) and the model trained with standard FixUp
initialization using the optimal learning rate of 0.1 to
see whether the slightly better model performance of
standard FixUp compared to our model was statisti-
cally significant. The slightly better performance of
standard FixUp was statistically significant only for 2
of the 5 seed values used for model training (with a
probability of more than 90%). For the other 3 seed
values there was no statistical significance.
We also examined whether our approach works 1)
on a different dataset and 2) with a different network
architecture. The same experiment (same network ar-
chitecture and training setup) was conducted using the
CIFAR-100 dataset. The results are shown in figure 4
(right). They show that our approach has the same
effect for the CIFAR-100 dataset as for the CIFAR-
10 dataset. Next, we have examined whether our ap-
proach reaches the same effect when using a differ-
ent network architecture for classifying the CIFAR-
Are Image Patches Beneficial for Initializing Convolutional Neural Network Models?
351
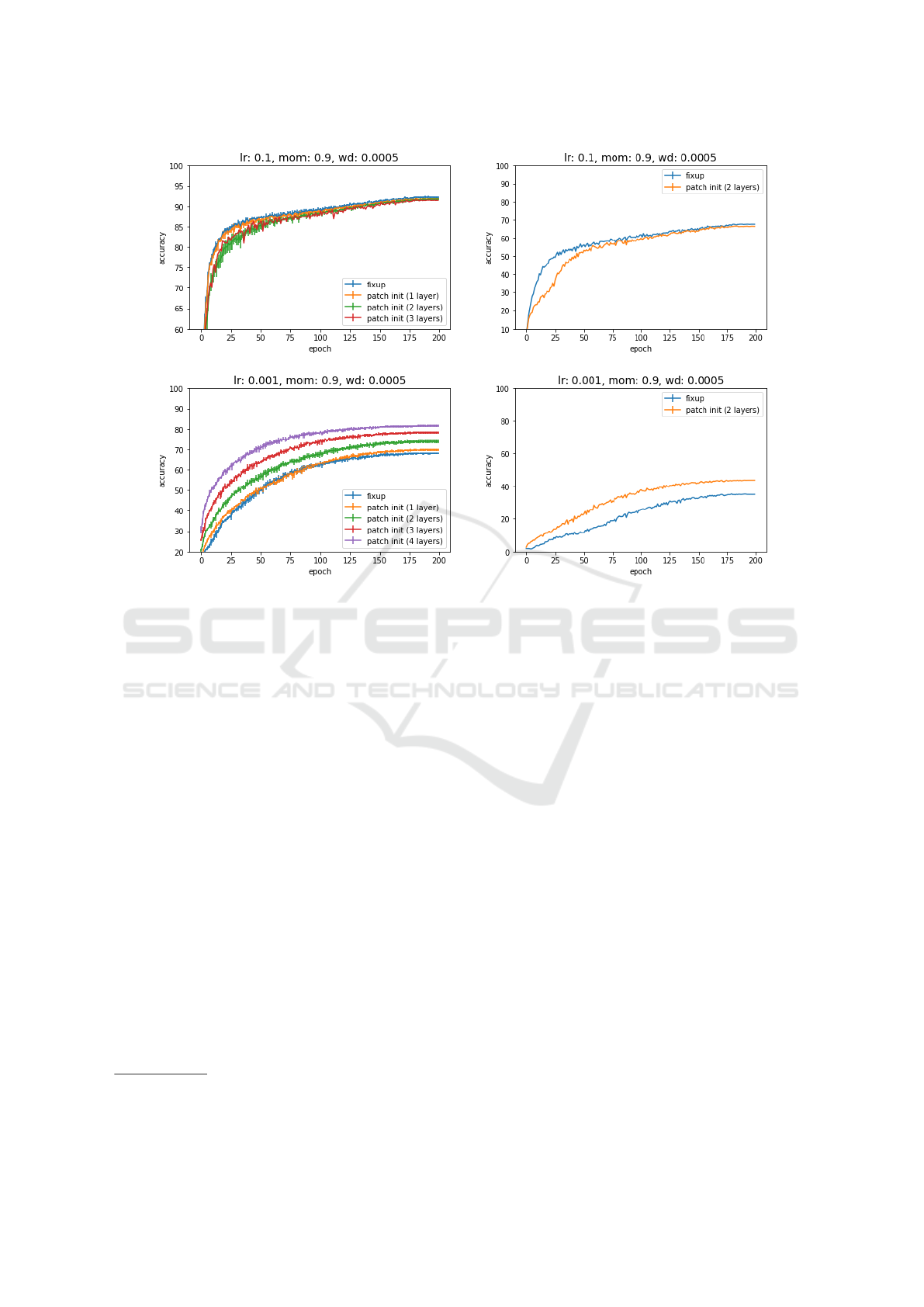
CIFAR-10
CIFAR-10
CIFAR-100
CIFAR-100
Figure 4: Model performance of our approach applied to multiple layers (1 layer: test case a, 2 layers: test case b, 3 layers:
test case c, 4 layers: test case d) compared to FixUp for CIFAR-10 (left) and CIFAR-100 (right) using an optimal learning
rate (top) and a suboptimal learning rate (bottom). CIFAR-10 test accuracies are averaged over 5 models.
10 dataset. We have decided to use a standard 18-
layer ResNet architecture (containing normalization
layers), since it is a widely used network architec-
ture. The network has 11,181,642 trainable param-
eters. However, this time the effect was not as strong.
Only after carefully choosing which layers to initial-
ize with our approach we have been able to slightly
surpass the performance of Kaiming Uniform when
using a suboptimal learning rate.
Finally, we have also tested how our approach
performs for models pre-trained on ImageNet (Deng
et al., 2009). Therefore, we have used the 18-layer
ResNet architecture to train a model for the plant
seedling dataset
4
. However, altering the network
weights of the pre-trained network using our approach
resulted in a performance decrease.
5 CONCLUSION
Our experiments (illustrated in section 4) have shown
that information given in the training data can be
useful to initialize CNN based image classification
4
https://www.kaggle.com/c/plant-seedlings-
classification
models. We have been able to train such models
from scratch for the MNIST, CIFAR-10 and CIFAR-
100 classification problem using an image patch
based weight initialization. The trained models have
reached a similar accuracy on the test set compared
to models initialized by SOTA initialization methods
over the course of training. When we have not used
optimized values for the training hyper-parameters
(learning rate, momentum, weight decay), the dete-
rioration of the test accuracy was lower for models
using the image patch based initialization. In con-
trast, the deterioration of the test accuracy was higher
for models whose weights have been initialized us-
ing SOTA methods. This effect could not only be ob-
served when initializing the first ConvLayer but also
other ConvLayers although they are not directly con-
nected to the input image (from where the patches
were extracted). However, intermediate ConvLayers
are indirectly connected to the input image (since they
are high-level feature detectors) which might causes
this effect. As a result, it seems that using image
patches for weight initialization might make the train-
ing process more robust against choosing bad values
for the training hyper-parameters. This effect was
much stronger for the LeNet and the 20-layer ResNet
architecture used by Zhang et al. (Zhang et al., 2019)
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
352

compared to the 18-layer ResNet architecture. In
future work it could be investigated whether image
patches can be used to improve existing methods for
network initialization. This might also lead to a more
explainable training process.
REFERENCES
Angelov, P. and Soares, E. (2019). Towards explainable
deep neural networks (xdnn). ArXiv, abs/1912.02523.
Bengio, Y., Lamblin, P., Popovici, D., and Larochelle, H.
(2007). Greedy layer-wise training of deep networks.
In Sch
¨
olkopf, B., Platt, J. C., and Hoffman, T., editors,
Advances in Neural Information Processing Systems,
volume 19, pages 153–160. MIT Press.
Castillo Camacho, I. and Wang, K. (2019). A sim-
ple and effective initialization of CNN for forensics
of image processing operations. In Proceedings of
the ACM Workshop on IH&MMSec, IH&MMSec’19,
pages 107–112, New York, NY, USA. ACM.
Dauphin, Y. N. and Schoenholz, S. (2019). Metainit: Ini-
tializing learning by learning to initialize. In Wallach,
H., Larochelle, H., Beygelzimer, A., d Alche-Buc, F.,
Fox, E., and Garnett, R., editors, Adv Neural Inf Pro-
cess Syst 32, pages 12645–12657. Curran Associates.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In CVPR09, pages 248–255, Miami,
Florida. IEEE.
Dietterich, T. G. (1998). Approximate statistical tests
for comparing supervised classification learning algo-
rithms. Neural Computation, 10(7):1895–1923.
Frankle, J. and Carbin, M. (2018). The lottery ticket hy-
pothesis: Finding sparse, trainable neural networks.
ArXiv, abs/1803.03635.
Glorot, X. and Bengio, Y. (2010). Understanding the dif-
ficulty of training deep feedforward neural networks.
In JMLR W&CP: Proceedings of the 13th Int Conf on
AI and Statistics, volume 9, pages 249–256.
Gray, S., Radford, A., and Kingma, D. P. (2017). GPU
kernels for block-sparse weights.
He, K., Fan, H., Wu, Y., Xie, S., and Girshick, R. (2019).
Momentum contrast for unsupervised visual represen-
tation learning. ArXiv, abs/1911.05722.
He, K., Zhang, X., Ren, S., and Sun, J. (2015a). Deep
residual learning for image recognition. ArXiv,
abs/1512.03385.
He, K., Zhang, X., Ren, S., and Sun, J. (2015b). Delving
deep into rectifiers: Surpassing human-level perfor-
mance on imagenet classification. In Proceedings of
the 2015 IEEE ICCV, ICCV 2015, pages 1026–1034,
USA. IEEE Computer Society.
Ioffe, S. and Szegedy, C. (2015). Batch normalization: Ac-
celerating deep network training by reducing internal
covariate shift. ArXiv, abs/1502.03167.
Kanungo, T., Mount, D. M., Netanyahu, N. S., Piatko,
C. D., Silverman, R., and Wu, A. Y. (2002). An effi-
cient k-Means clustering algorithm: Analysis and im-
plementation. IEEE PAMI, 24(7):881–892.
Koturwar, S. and Merchant, S. (2017). Weight initialization
of deep neural networks (DNNs) using data statistics.
ArXiv, 1710.10570.
Kr
¨
ahenb
¨
uhl, P., Doersch, C., Donahue, J., and Darrell, T.
(2015). Data-dependent initializations of convolu-
tional neural networks. ArXiv, abs/1511.06856.
Krizhevsky, A. and Hinton, G. (2009). Learning multiple
layers of features from tiny images. Master’s thesis,
Department of Computer Science, Uni of Toronto.
LeCun, Y. and Cortes, C. (1998). The MNIST database of
handwritten digits.
Li, O., Liu, H., Chen, C., and Rudin, C. (2017). Deep learn-
ing for case-based reasoning through prototypes: A
neural network that explains its predictions. ArXiv,
abs/1710.04806.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. Int J Comput Vis, 60(2):91–110.
McInnes, L., Healy, J., and Melville, J. (2018). UMAP:
Uniform manifold approximation and projection for
dimension reduction. ArXiv, 1802.03426.
Mishkin, D. and Matas, J. (2015). All you need is a good
init. ArXiv, abs/1511.06422.
Misra, I. and van der Maaten, L. (2019). Self-supervised
learning of pretext-invariant representations. ArXiv,
abs/1912.01991.
¨
Ozbulak, G. and Ekenel, H. K. (2018). Initialization of
convolutional neural networks by gabor filters. 26th
Signal Processing and Communications Applications
Conference (SIU), pages 1–4.
Pearson, K. (1901). LIII. On lines and planes of closest fit to
systems of points in space. The London, Edinburgh,
and Dublin Philosophical Magazine and Journal of
Science, 2(11):559–572.
Robbins, H. and Monro, S. (1951). A stochastic approxi-
mation method. Ann Math Stat, 22:400–407.
Ruder, S. (2016). An overview of gradient descent opti-
mization algorithms. ArXiv, abs/1609.04747.
Saxe, A. M., McClelland, J. L., and Ganguli, S. (2013). Ex-
act solutions to the nonlinear dynamics of learning in
deep linear neural networks. ArXiv, abs/1312.6120.
Seuret, M., Alberti, M., Liwicki, M., and Ingold, R. (2017).
PCA-initialized deep neural networks applied to docu-
ment image analysis. In 14th IAPR International Con-
ference on Document Analysis and Recognition (IC-
DAR), volume 01, pages 877–882.
Xie, N., Ras, G., van Gerven, M., and Doran, D. (2020).
Explainable deep learning: A field guide for the unini-
tiated. ArXiv, abs/2004.14545.
Zeiler, M. D. and Fergus, R. (2013). Visualizing
and understanding convolutional networks. ArXiv,
abs/1311.2901.
Zhang, H., Dauphin, Y. N., and Ma, T. (2019). Fixup ini-
tialization: Residual learning without normalization.
ArXiv, abs/1901.09321.
Zhuang, F., Qi, Z., Duan, K., Xi, D., Zhu, Y., Zhu, H.,
Xiong, H., and He, Q. (2019). A comprehensive sur-
vey on transfer learning. ArXiv, abs/1512.03385.
Are Image Patches Beneficial for Initializing Convolutional Neural Network Models?
353
