
PIU-Net: Generation of Virtual Panoramic Views
from Colored Point Clouds
Michael Georg Adam
a
and Eckehard Steinbach
b
Chair of Media Technology, Technical University of Munich, Germany
Keywords:
Virtual View Generation, Rendering, Deep Learning, Digital Twin, Virtual Reality.
Abstract:
As VR-systems become more and more widespread, the interest in high-quality content increases drastically.
One way of generating such data is by digitizing real world environments using SLAM-based mapping devices,
which capture both the geometry of the environment (typically as point clouds) and its appearance (typically
as a small set of RGB panoramas). However, when creating such digital representations of real-world spaces,
artifacts and missing data cannot be fully avoided. Furthermore, free movement is often restricted. In this
paper, we introduce a technique, which allows for the generation of high quality panoramic views at any
position within a captured real world scenario. Our method consists of two steps. First, we render virtual
panoramas from the projected point cloud data. Those views exhibit imperfections in comparison to the real
panoramas, which can be corrected in the second step by an inpainting neural network. The network itself
is trained using a small set of panoramic images captured during the mapping process. In order to take full
advantage of the panoramic information, we use a U-Net-like structure with circular convolutions. Further, a
custom perceptual panoramic loss is applied. The resulting virtual panoramas show high quality and spatial
consistency. Furthermore, the network learns to correct erroneous point cloud data. We evaluate the proposed
approach by generating virtual panoramas along novel trajectories where the panorama positions deviate from
the originally selected capturing points and observe that the proposed approach is able to generate smooth and
temporally consistent walkthrough sequences.
1 INTRODUCTION
With the introduction of consumer-grade head
mounted displays (HMDs) such as the HTC Vive or
Oculus Rift, Virtual Reality (VR) experiences have
become more accessible and affordable. This grow-
ing market demands high quality content for gaming
and video applications. As programming and render-
ing virtual scenes can be expensive and time consum-
ing, capturing real world scenarios for later use in VR
applications becomes important.
Two main solutions for producing such VR con-
tent from real world scenes exist. Both come with
their own challenges. One way is by taking multi-
ple high quality pictures from the scene and record-
ing the respective capturing pose. Afterwards, a nav-
igation graph is constructed. The user can then nav-
igate through the graph by selecting the images. A
well known example for this is the google streetview
service (Anguelov et al., 2010). This approach,
a
https://orcid.org/0000-0002-9512-5062
b
https://orcid.org/0000-0001-8853-2703
however, leads to discrete movements and a non-
immersive user-experience. It can be improved by a
denser capturing of pictures, which leads to a higher
memory demand. Furthermore, those datasets only
support movements in predefined directions and the
user is not able to choose his/her position freely.
If three-dimensional views are desired, stereoscopic
pictures must be taken during the capturing process.
The second way of generating VR content from
real world recordings is 3D data, such as colored point
clouds. Such data can be produced by a visual SLAM-
algorithm, which, for instance, fuses camera and li-
dar data. The resulting views often lack details, since
point clouds still cannot be captured as densly as real
photos, even though dense reconstruction algorithms
exist (Kerl et al., 2013). Nevertheless, they still have
blind spots/holes where not enough data could be cap-
tured and are not always applicable due to cost or ap-
plication specific reasons. The advantage of 3D data
is, however, that (stereoscopic) views can be rendered
from any point inside the data. This means that the
user can move freely in the VR representation and in
a smooth way.
Adam, M. and Steinbach, E.
PIU-Net: Generation of Virtual Panoramic Views from Colored Point Clouds.
DOI: 10.5220/0010198302690276
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 4: VISAPP, pages
269-276
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All r ights reserved
269
Combined approaches exist as well. For instance
the Standford dataset includes both, point clouds and
panoramas (Armeni et al., 2017). Here the user
can select between the spatially registered representa-
tions. However, no stereoscopic images are included.
Again, they can be rendered from the point cloud, but
only sparse representations can be achieved.
This paper closes the gap between the two types
of representations and inherits their advantages of
free movement and high quality visualization. We
present a process of producing dense and high reso-
lution monoscopic or stereoscopic panoramic views
at any location inside a point cloud, by exploring the
photo-inpainting capabilities of neural networks.
2 RELATED WORK
Depending on the representation, the problem to be
solved is either inpainting point clouds or generating
virtual views between two or more images. The latter
one can be done either geometry-based or by using
transformations learned by neural networks (Flynn
et al., 2016). (Sung et al., 2014) for instance predicts
the view at the desired position based on its surround-
ing images and then merges those predictions. Gener-
ating training data for those approaches is crucial and
often too expensive or not applicable, since certain
places for taking photos are not reachable or accessi-
ble.
Generating 3D representations with geometric
methods has already been shown in (Moezzi et al.,
1997). Advancements are still proposed, for instance
by the authors of (Hedman et al., 2017), who are
able to generate photo-realistic point clouds. Ren-
dering virtual views in this case collapses to a sim-
ple point cloud rendering task. However, they have
in common that their 3D representation contains ar-
eas where data is missing, even though this data can
be found in the corresponding images. Closing those
blind spots turned out to be difficult and only clas-
sical approaches, which fill the missing information
by interpolation of the existing data, were developed
(Sahay and Rajagopalan, 2015; Fu et al., 2018).
A combined classical and learning-based ap-
proach is (Lai et al., 2019). They try to predict dense
depth maps from stereo images with neural networks,
in order to then use the depth-map for denser three-
dimensional reconstruction.
An approach similiar to ours (Aliev et al., 2019)
describes the point cloud by neural network gen-
erated features, which are later decoded into dense
views. Contrary to (Aliev et al., 2019), we do not
use descriptors but render views directly from the
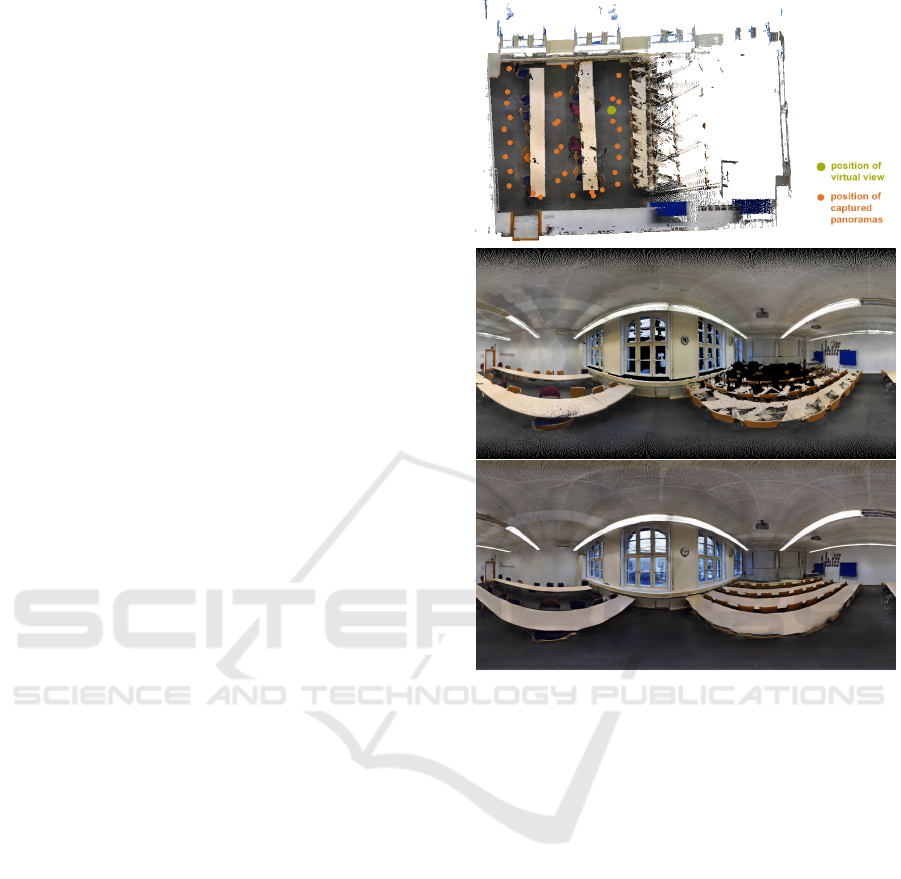
Figure 1: Point cloud showing a classroom and the position
of the captured photos (top). Comparison of the rendered
(middle) and the inpainted view (bottom) at a position not
included in the training data. The wall and the windows
as well as the back of the classroom are completed with
semantically and geometrically correct information.
point cloud, which guarantees consistency of ren-
dered views throughout the scene. We evaluate this
by rendering walkthrough video sequences. Since we
use real photos we can also fill in bigger holes with
complex structure, for which the corresponding infor-
mation is missing in the point cloud data. As no de-
coder has to be learned, only few training samples are
sufficient.
The paper (Bui et al., 2018) introduces the same
underlying approach as our method. However, we
show in this paper, that one can achieve similar re-
sults without the use of generative adversial networks,
but rather only a CNN. Because of the reduced com-
plexity, we were able to train high-resolution net-
works. Further, we specialized the network to pro-
duce panoramic images, rather than one view. Since
the authors do not directly train on the real images,
their network is not capable of filling missing point
cloud data. A very recent related work (Dai et al.,
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
270
2020) tries to improve this approach by directly ren-
dering views from the volume data.
3 THE DATA STRUCTURE
Our virtual panorama generation process assumes the
availability of a colored point cloud representing a
scene. Further, a finite set of high-quality pictures
needs to be taken inside the scene. The corresponding
capturing positions of the images have to be recorded
as well. Such data can be produced by advanced
SLAM algorithms such as (Mur-Artal and Tard
´
os,
2017). In this paper, only indoor environments are
tested. Those are considered more difficult since they
are typically more complex. Also more occlusion oc-
curs, due to shorter distances. In addition to that, we
use equirectangular images as they capture all pos-
sible views at a certain position. Such data can be
found, for instance, in the Standford dataset (Armeni
et al., 2017). After a training process, only the point
cloud data is needed when handling data of the same
domain.
4 THE ALGORITHM
Our method of producing panoramic images at any
position inside the captured scene consists of two
steps. In the first step, we render virtual views from
the point cloud. In the second step, the resulting im-
ages are enhanced by a trained neural network. The
point cloud rendering, neural network architecture
and its training process are described in the follow-
ing subsections.
4.1 Panoramic Projection
Instead of moving the ego view to the desired posi-
tion, the point cloud is translated and rotated accord-
ingly. This causes the viewpoint to be equal to the
system origin. The x, y, z-coordinates of the individ-
ual points are then transformed into spherical coordi-
nates:
r
φ
θ
=
p
x
2
+ y
2
+ z
2
arctan2(y, x)
arccos
z
√
x
2
+y
2
+z
2
(1)
Now φ and θ can be seen as the new x and y coordi-
nates of a projected image plane and can be quantized.
The number of quantization steps corresponds to the
desired image resolution.
translate & rotate ( points );
, ✓, r =sphericalcoordinates(points);
quantize ( , ✓,desiredimage resolution );
sort ( points, by r );
for p in points do
image ( (p) ± ✏, ✓(p) ± ✏ )=p.colorvalue;
end
1
Figure 2: Pseudo-Code of the panorama rendering.
Successively, the points are sorted in descending
order by the r coordinate, equivalent to the depth in-
formation of the rendered view. In an iteration over
this ordered list, the empty image gets filled with the
color-value of the point at its projected position. Also
the adjacent pixels inside a ε-region of the projected
point are colored. If only the pixel at the projected
point position is colored, a sparse image is rendered.
By also considering the neighboring pixels, a denser
result can be achieved, without losing information of
close-by point cloud points. This corresponds to a
simplified surfel-strategy (Pfister et al., 2000) and op-
timizes the training-process as the network needs to
fill in less black space, but rather learns the high-
frequency components of the image.
At the end, the origin of the image coordinate sys-
tem is shifted to the upper left corner. The Pseudo-
code of this rendering method is given in Fig. 2. The
middle part of Fig. 1 shows an example of a rendered
panorama. The rendered image has holes and black
areas, where no corresponding information is found
in the point cloud.
4.2 PIU-Net
Next, the generated panoramas are used to train a
neural network. This network should learn how to
fill the missing data, hence Panorama Inpainting U-
Net (PIU-Net). U-Net is a convolutional feedforward
network originaly developed for image segmentation.
We adapt its structure, as it provides direct connec-
tions between input and output layers (Ronneberger
et al., 2015). This makes sense, since most of the pix-
els in the panorama are already colored and thus can
be passed through. The network only has to learn,
which of the pixels can be kept and which have to
be modified. Furthermore, U-Net allows for a small
training dataset to achieve reasonable results. This is
important, since the amount of captured real photos,
which are used for training, is finite.
As the network has to deal with panoramic infor-
mation, where the end of the image corresponds to
the beginning and vice-versa, normal convolution is
not ideal. Instead of applying a specific panorama
PIU-Net: Generation of Virtual Panoramic Views from Colored Point Clouds
271

3 16 16
32 32
64 64
128 128
256
256 128
64128
64 32
32 16 3
2048 x 1024
2048 x 1024
conv 3x3, ReLu
copy and crop
max pool 2x2
up-conv 2x2, ReLu
conv 1x1, Sigmoid
Figure 3: Structure of the Panorama Inpainting U-Net,
based on (Ronneberger et al., 2015).
loss like in (Lai et al., 2019) or input-padding, we
replace all convolution layers with circular convolu-
tions, which were first introduced in the context of
CNNs in (Schubert et al., 2019). This has the ad-
vantage that the flow of information is not cut at
the borders of the panoramas and the circular in-
formation is used throughout all layers of the net-
work. This leads to rotation invariance, which is dis-
cussed later. Corresponding to the original imple-
mentation, ReLu-activation-functions and He-normal
weight-initialization is used. As a last step, the in-
put and output is fixed to have three channels, since
we use the network to inpaint but not to segment and
classify. The resulting structure is shown in Fig. 3.
4.3 Perceptual Panorama Loss
During the experiments, we noticed that a pure mean-
squared-error (MSE) loss already leads to convincing
results. However, introducing a more advanced loss
for training can further improve the quality of the in-
painted panoramas. In order to apply a perceptual loss
(Johnson et al., 2016), we use the last feature vector
f of VGG16-Net (Simonyan and Zisserman, 2014),
which was pretrained on the ImageNet dataset (Deng
et al., 2009). This helps the network to create even
more realistic looking images.
Further, we introduce a panoramic loss, which
considers the different patch size a pixel covers on the
sphere.
A =
Z
φ
i+1
φ
i
Z
θ
j+1
θ
j
r
2
sinθdθdφ (2)
According to the formula, the area of a pixel only
varies along the vertical axis in a (co)-sinusoidal man-
ner. This problem has to be accounted for, because
errors along the equator correspond to bigger errors
in the projection of the real world than errors at the
poles. Hence, the loss term should be weighted ac-
cordingly. Since we shift the origin of the image to
the upper left corner, the cosine becomes a sine. The
total loss is then defined as
Loss (x, y) = sin
y + 0.5
Y
res
h
MSE
o
pr
(x, y) , o
gt
(x, y)
+w
∑
f
MSE
VGG16
o
pr
, VGG16
o
gt
i
(3)
Where o
pr
and o
gt
correspond to the current output of
the network and the ground truth. w is a weighting
factor between the two losses. This also accounts for
other constants resulting from integrating Equation 2.
The 0.5 is added inside the cosine, so that each pixel
center is used. Y
res
is defined as the amount of pixels
in the image along the y-axis.
4.4 Training Process
In order to train the neural network, first panoramas
are rendered from the point cloud at the same po-
sitions where the real panoramas were captured by
high-quality cameras. The rendered panoramas are
then used as the network input. The camera-produced
panoramas are utilized as the trainable output. The
expected result is that the network learns to transform
sparse virtual panoramas into photo-quality views.
For the loss-function the previously defined loss with
a weighting factor w = 0.1 is used. As more train-
ing data is needed, we make use of data augmentation
techniques such as vertical flips and shifts. The re-
sulting data is split into training and validation data.
In a first step, we want to produce realistic views any-
where in the scene, thus we test the network only by
judging the quality of photos produced at different
positions than the training data without comparison
to specific test data. In a second step, we then also
compare real world test-photos to their virtual coun-
terparts.
5 EXPERIMENT
In this paper an image resolution of 2048 ×1024 is
used. Higher resolutions could be achieved with the
same architecture. Therefore, we reduce the number
of channels used in the original U-Net implementa-
tion by a factor of four. We keep the stride of three
in the circular convolutions. Figure 3 visualizes this.
The tested datasets were recorded with the M3 map-
ping trolley from NavVis (NavVis GmbH, 2019). One
set was captured in a classroom and the other in a
hallway. For the first training run, the class room
was used. It took around one day on an NVIDIA Ti-
tan xp to converge and resulted in a MSE-loss of be-
low 0.008. For all following tests we provide video
sequences in the supplementary material which are
more illustrative.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
272

Figure 4: Comparison of captured photo (bottom), the ren-
dered (top) and the inpainted view (middle). Only the cor-
rect type of chair is revised with blue pads. The panorama
stitching artifacts (e.g. discontinuity at the table) occurring
in the captured photo, are also learned by the network.
5.1 Fill-in
In Fig. 1 and all following examples it can be seen
that the holes in the rendered panoramic images can
be filled geometrically as well as semantically in a
meaningful manner. For instance, we did not scan the
end of the classroom, which had the effect that data
was missing in the point cloud representation. The
network, however, could learn this information from
the photos, which contain the relevant information.
Furthermore the windows are filled now. Such trans-
parent and reflective areas are hard to capture, hence
the data is usually missing in the point cloud.
5.2 Correction
The network not only learns to inpaint missing data,
but also corrects image areas as can be seen in Fig 4.
In the point cloud representation of the chairs, blue
pads are either missing or are displayed in brown.
However, in reality the pads are blue as can be seen
Figure 5: Three generated views at the same position, but
with different orientation.
in the real photos. Furthermore the network learns
to differentiate between the chair type, since the blue
pad is only added to the correct type of chair.
5.3 Orientation Independency
We next show that the resulting pictures in Fig. 5 do
not depend on the orientation. In order to test this,
we generate several images at the same position each
with a different horizontal angle. Differences between
the frames of a rotation cannot be recognized by a
human. The computed MSE between the rotated im-
ages, when rotated back, stays below 0.006. The re-
sult can be reasoned in the architecture since we use
circular convolution and shift as a data augmentation
technique. This confirms and also visualizes the re-
sults of (Schubert et al., 2019).
5.4 Spatial Consistency
Figures 1, 4−6 and 9 show the same classroom scene
at different positions. One can see by inspection that
they all show the same underlying data. This shows
that the network is aware of its position and the geom-
PIU-Net: Generation of Virtual Panoramic Views from Colored Point Clouds
273
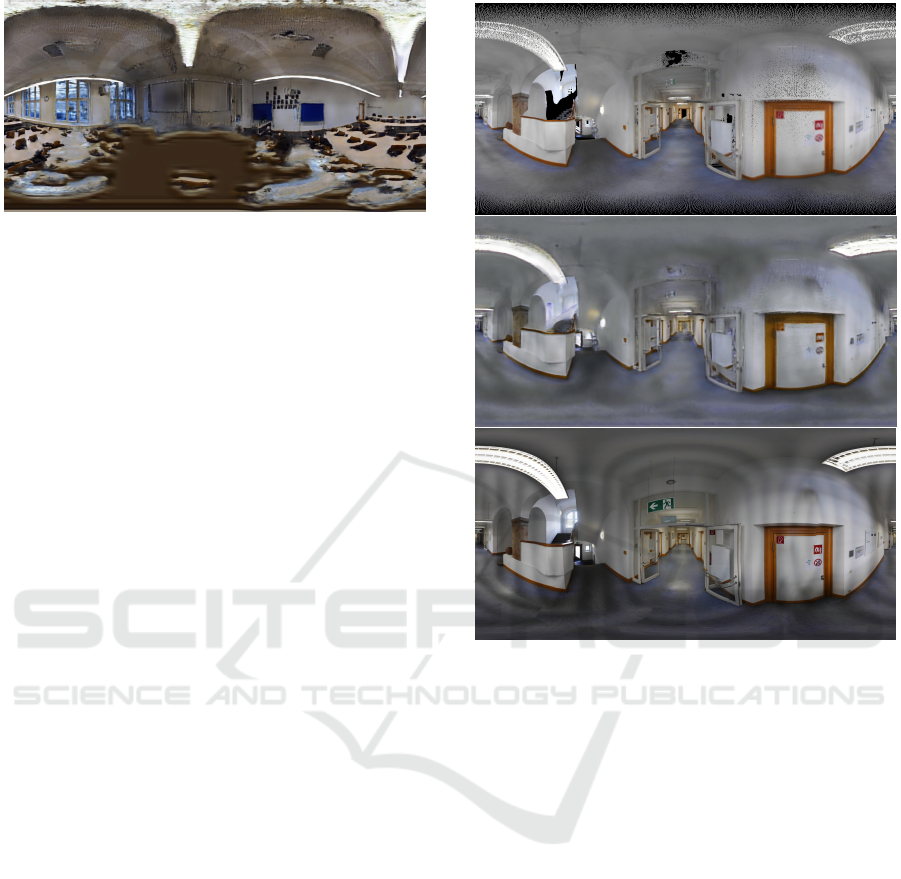
Figure 6: Generated view outside of the captured area.
etry of the environment. Otherwise the generated im-
ages would not fit together. This spatial consistency
can especially be seen in the video sequences, where
all frames are generated individually. The frames only
change slightly due to the ego motion, but not due to
some misrepresentation of the environment. This ge-
ometric consistency can further be explained by the
fact that the basic structure of each view is rendered
from the point cloud. The point cloud itself always
stays the same and forms the underlying structure for
each rendered view. Thus, the rendered views can be
seen as a template on which the network builds to pro-
duce artificially completed views.
Shadow artifacts in the training photos, which are
not spatially consistent across the room, such as the
vertical stripes seen on the walls, can be reduced by
the network.
5.5 Dreaming
In order to investigate the limits of the proposed ap-
proach, panoramas are generated at the boundary of
the captured scene. One can observe that the further
the view exits the scene, the more the neural network
is, what we call, dreaming about the correct appear-
ance. An example is shown in Fig. 6. The result gets
more blurred and sometimes resembles deep dream-
ing effects (Mordvintsev et al., 2015). This can be
reasoned as the input to the network gets more and
more black and less learned data can be applied. The
part of the picture, which still shows meaningful data,
can still be filled. This can be seen, for instance, on
the right, where the blue pin board and the gallery can
be reconstructed, although they never have been cap-
tured from this frontal angle.
5.6 Transfer Learning
As a second step we also run this process on a
recorded hallway in order to proof that it is applicable
to any data set. This time, however, we did not train
from the beginning but used the previously trained
weights for initialization. Training now only took less
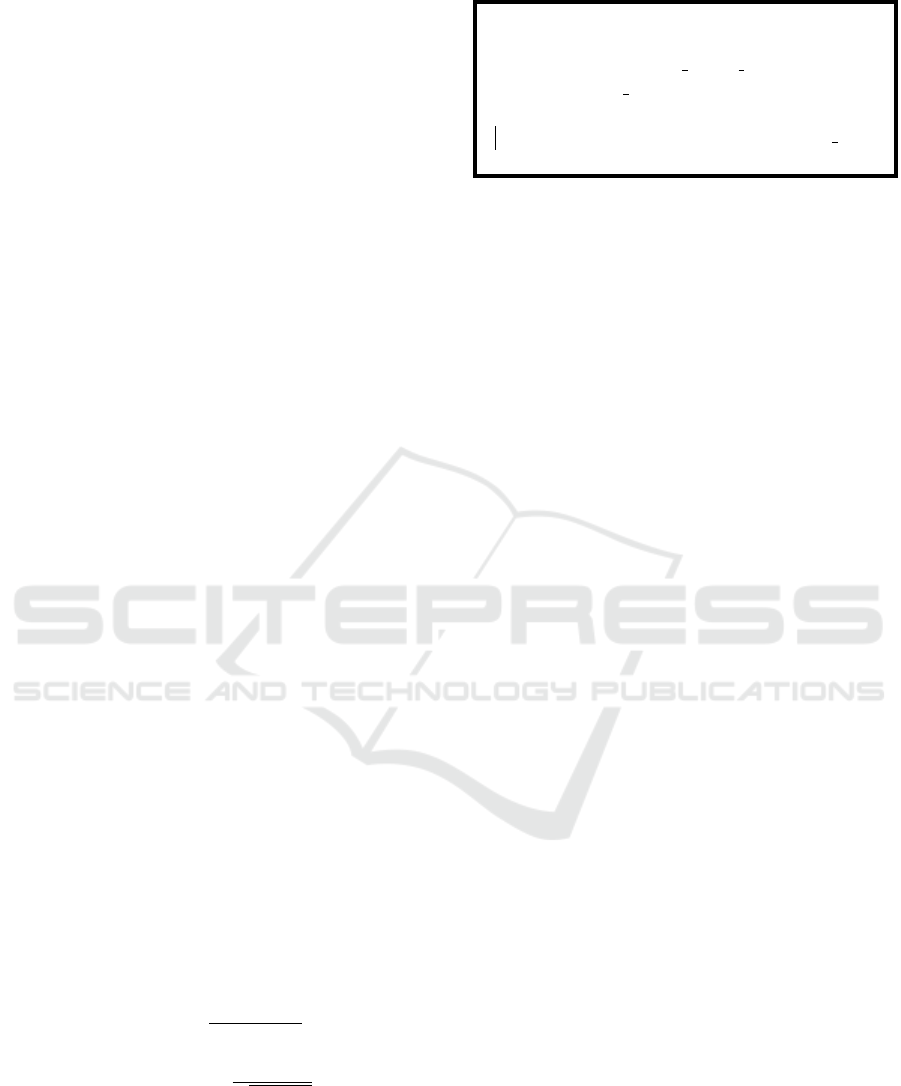
Figure 7: Comparison of the rendered (top) and the in-
painted view (middle) with a captured test-photo (bottom)
inside the trained area. The real panoramas show vertical
stripes from bad illumination and stitching, which also af-
fects the quality of the predictions.
than half an hour and the results, shown in Fig. 7, are
of similar quality as for the classroom scene. For in-
stance, the exit on the left and the stairs can be fully
recovered. For this we also provide a comparison to a
real world panorama, which was not used for training.
5.7 Same Domain
Furthermore, we test this previously refined network
on another section of the hallway, which was not part
of the training. As the scene is from the same domain
(looking similar) the network is still able to fill in the
missing information in a meaningful manner. How-
ever, better results can be achieved when retraining
the network. This can be seen by comparing Fig. 7
and Fig. 8. It is important to note that the network not
only fills the missing data by learned patterns, but also
considers the sparse data which form the basis of the
rendered views. This can be seen by close observation
of the posters and floor-plan. Although a bit blurry,
they are all filled individually without changing the
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
274

Figure 8: Comparison of the rendered (top) and the in-
painted view (middle) with a captured test-photo (bottom)
outside the trained area.
underlying pattern. This blurriness again reminds of
some dreaming artifacts. For VR related applications
this probably has low relevance as long as it is not a
part of the user’s focus.
5.8 Loss Comparison
All previously generated panoramic views made use
of the more advanced perceptual panoramic loss. In
order to visualize its effect, a second network was
trained with only a channel-wise MSE. A compari-
son between two generated panoramas can be seen in
Fig. 9. When using the more advanced loss, the over-
all sharpness of the image improves. For instance, the
ceiling maintains its texture. Further, the grey chair in
the middle of the image does not get blurred out. Also
shadow effects are reduced.
6 DISCUSSION
We have shown that our method produces virtual
panoramic views at any position within the captured
Figure 9: Comparison of a network prediction using MSE
(top) and the panoramic perceptual loss (bottom) during
training.
scene. The missing data is filled in a meaningful and
consistent manner throughout all positions and orien-
tations. This allows us to produce smooth transitions
in animations. By introducing a perceptual panoramic
loss the image quality can be enhanced. The network
is also able to learn how certain things look and to cor-
rect wrong data accordingly. We further tested the be-
havior of the network on completely missing data as
well as on data which it has not seen before. Lastly we
have shown that transfer learning enables us to change
the domain of the environment easily.
The virtual pictures also contain some artifacts.
Especially on the walls, shadows are enforced and
create some small darker clouded areas. The chairs
are rendered darker, too. We attribute this to the
weakly illuminated scene, hence the ceiling is af-
fected the most. Some of those illumination artifacts
also have their origin in the training data and can be
seen in the photos, which show stripes on the wall.
The network is able to reduce them, however not com-
pletely.
Sometimes the poles of the panoramas
(top/bottom) are predicted with inconsistencies.
This also comes from the training data as the poles
of the real pictures exhibit the most distortion.
Furthermore, the training data has some stitching
artifacts, where, for instance, the edge of a table has a
discontinuity. Some of the predicted images display
the same error. We believe some of those problems
can be mitigated by introducing a more advanced loss
and training method.
PIU-Net: Generation of Virtual Panoramic Views from Colored Point Clouds
275

7 CONCLUSION
In this paper, we describe a novel two stage process
which allows for the generation of photo-realistic vir-
tual views inside colored point clouds. Our approach
has the advantage of being independent from the cap-
turing method and allows for free movements inside
the scene. High-resolution, realistic-looking panora-
mas are produced, which can be used for virtual real-
ity applications. Since this can be done at any posi-
tion and the process is locally and temporally consis-
tent, rendering stereoscopic views is possible as well.
However, the network still produces some unwanted
shadow artifacts. In future work, an even better suited
loss function may be found to reduce those errors. In
addition, the rendering step and network should be
modified such that it also handles smaller view ports
with the same resolution. Further, it would be of
interest to evaluate the performance in a consumer-
centered study.
ACKNOWLEDGEMENTS
This work is funded by Germany’s Federal Ministry
of Education and Research within the project KIMaps
(grant ID 01IS20031C).
REFERENCES
Aliev, K.-A., Ulyanov, D., and Lempitsky, V. (2019).
Neural Point-Based Graphics. arXiv preprint
arXiv:1906.08240.
Anguelov, D., Dulong, C., Filip, D., Frueh, C., Lafon,
S., Lyon, R., Ogale, A., Vincent, L., and Weaver, J.
(2010). Google street view: Capturing the world at
street level. Computer, 43(6):32–38.
Armeni, I., Sax, S., Zamir, A. R., and Savarese, S. (2017).
Joint 2d-3d-semantic data for indoor scene under-
standing. arXiv preprint arXiv:1702.01105.
Bui, G., Le, T., Morago, B., and Duan, Y. (2018). Point-
based rendering enhancement via deep learning. The
Visual Computer, 34(6-8):829–841.
Dai, P., Zhang, Y., Li, Z., Liu, S., and Zeng, B. (2020).
Neural point cloud rendering via multi-plane projec-
tion. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
7830–7839.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE conference on com-
puter vision and pattern recognition, pages 248–255.
Ieee.
Flynn, J., Neulander, I., Philbin, J., and Snavely, N. (2016).
Deepstereo: Learning to predict new views from the
world’s imagery. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 5515–5524.
Fu, Z., Hu, W., and Guo, Z. (2018). Point cloud inpainting
on graphs from non-local self-similarity. In 2018 25th
IEEE International Conference on Image Processing
(ICIP), pages 2137–2141. IEEE.
Hedman, P., Alsisan, S., Szeliski, R., and Kopf, J. (2017).
Casual 3d photography. ACM Transactions on Graph-
ics (TOG), 36(6):234.
Johnson, J., Alahi, A., and Fei-Fei, L. (2016). Percep-
tual Losses for Real-Time Style Transfer and Super-
Resolution.
Kerl, C., Sturm, J., and Cremers, D. (2013). Dense visual
SLAM for RGB-D cameras. In 2013 IEEE/RSJ In-
ternational Conference on Intelligent Robots and Sys-
tems, pages 2100–2106. IEEE.
Lai, P. K., Xie, S., Lang, J., and Laqaru
`
ere, R. (2019). Real-
time panoramic depth maps from omni-directional
stereo images for 6 dof videos in virtual reality. In
2019 IEEE Conference on Virtual Reality and 3D
User Interfaces (VR), pages 405–412. IEEE.
Moezzi, S., Tai, L.-C., and Gerard, P. (1997). Virtual view
generation for 3d digital video. IEEE multimedia,
4(1):18–26.
Mordvintsev, A., Olah, C., and Tyka, M. (2015). Inception-
ism: Going deeper into neural networks.
Mur-Artal, R. and Tard
´
os, J. D. (2017). Orb-slam2:
An open-source slam system for monocular, stereo,
and rgb-d cameras. IEEE Transactions on Robotics,
33(5):1255–1262.
NavVis GmbH (2019). https://www.navvis.com.
Pfister, H., Zwicker, M., Van Baar, J., and Gross, M. (2000).
Surfels: Surface elements as rendering primitives. In
Proceedings of the 27th annual conference on Com-
puter graphics and interactive techniques, pages 335–
342. ACM Press/Addison-Wesley Publishing Co.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In International Conference on Medical
image computing and computer-assisted intervention,
pages 234–241. Springer.
Sahay, P. and Rajagopalan, A. N. (2015). Geometric in-
painting of 3d structures. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion Workshops, pages 1–7.
Schubert, S., Neubert, P., P
¨
oschmann, J., and Pretzel, P.
(2019). Circular Convolutional Neural Networks for
Panoramic Images and Laser Data. In 2019 IEEE
Intelligent Vehicles Symposium (IV), pages 653–660.
IEEE.
Simonyan, K. and Zisserman, A. (2014). Very Deep Con-
volutional Networks for Large-Scale Image Recogni-
tion.
Sung, J. W., Jeon, Y. J., Jeon, B. M., and Lim, J. H. (2014).
Virtual view image synthesis method and apparatus.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
276
