
A Lightweight Real-time Stereo Depth Estimation Network with
Dynamic Upsampling Modules
Yong Deng
1 a
, Jimin Xiao
2 b
and Steven Zhiying Zhou
1,3
1
Department of Electrical and Computer Engineering, National University of Singapore, 117583, Singapore
2
Department of Electrical and Electronic Engineering, Xi’an Jiaotong-Liverpool University, Suzhou,
Jiangsu, 215123, P.R.China
3
National University of Singapore Suzhou Research Institute, Suzhou, Jiangsu, 215123, P.R.China
Keywords:
Stereo Matching, Depth Estimation, Deep Learning, Dynamic Upsampling.
Abstract:
Deep learning based stereo matching networks achieve great success in the depth estimation from stereo image
pairs. However, current state-of-the-art methods usually are computationally intensive, which prevents them
from being applied in real-time scenarios or on mobile platforms with limited computational resources. In
order to tackle this shortcoming, we propose a lightweight real-time stereo matching network for disparity
estimation. Our network adopts the efficient hierarchical Coarse-To-Fine (CTF) matching scheme, which starts
matching from the low-resolution feature maps, and then upsamples and refines the previous disparity stage by
stage until the full resolution. We can take the result of any stage as output to trade off accuracy and runtime.
We propose an efficient hourglass-shaped feature extractor based on the latest MobileNet V3 to extract multi-
resolution feature maps from stereo image pairs. We also propose to replace the traditional upsampling method
in the CTF matching scheme with the learning-based dynamic upsampling modules to avoid blurring effects
caused by conventional upsampling methods. Our model can process 1242 × 375 resolution images with 35-
68 FPS on a GeForce GTX 1660 GPU, and outperforms all competitive baselines with comparable runtime on
the KITTI 2012/2015 datasets.
1 INTRODUCTION
Depth estimation is a fundamental problem in com-
puter vision, with numerous applications including
3D reconstruction (Izadi et al., 2011; Alexiadis et al.,
2012), robotics (Schmid et al., 2013; Mancini et al.,
2016; Ye et al., 2017; Wang et al., 2017), augmented
reality (Alhaija et al., 2018; Zenati and Zerhouni,
2007), etc. Stereo matching is a passive depth esti-
mation method based on stereo triangulation between
two rectified images taken from different viewpoints
with a slight displacement. By stereo matching, we
can obtain the disparity between corresponding pixels
in the stereo images pair, which can be further trans-
formed into depth information according to the focal
length and the stereo camera’s baseline.
Unlike active depth sensors (e.g., time-of-flight
cameras, structured light cameras, and LiDAR),
stereo matching only relies on dual cameras with-
out the need for a particular illumination component,
a
https://orcid.org/0000-0003-0987-2182
b
https://orcid.org/0000-0002-9416-2486
making it significantly more affordable and energy-
efficient. Therefore, stereo depth estimation is espe-
cially suitable for mobile platforms with strict power
restrictions.
Stereo matching has been studied for decades (Lu-
cas et al., 1981; Hamzah and Ibrahim, 2016), where
the algorithms can be classified into local or global
approaches in general. Recently, deep convolutional
neural networks (CNN) have been adopted in this
feild (Mayer et al., 2016; Kendall et al., 2017) and
achieve significant progress. Deep neural networks
can learn to incorporate the context information and
thus better handle the ill-posed regions such as occlu-
sion areas, repeated patterns, and textureless regions.
Despite the remarkable advances, deep neural
networks tend to consume large amounts of com-
putational power, leading to significant process-
ing time. Most approaches on the KITTI stereo
2012/2015 leaderboards (Geiger et al., 2012; Menze
and Geiger, 2015) cannot achieve real-time process-
ing even though with a high-end GPU. For example,
CSPN (Cheng et al., 2019), the current state-of-the-
Deng, Y., Xiao, J. and Zhou, S.
A Lightweight Real-time Stereo Depth Estimation Network with Dynamic Upsampling Modules.
DOI: 10.5220/0010197607010710
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
701-710
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
701

art stereo matching algorithm, obtains a frame rate of
1FPS on a Titian X GPU, which is too slow for real-
time applications like augmented reality.
In this paper, we propose a lightweight real-time
stereo matching network for depth estimation. Our
network adopts the efficient hierarchical Coarse-To-
Fine (CTF) matching scheme (Quam, 1987; Yin et al.,
2019), which starts matching from the low-resolution
feature maps, and then upsamples and refines the pre-
vious results stage by stage until the full resolution.
The nature of such hierarchical processing allows us
trade-off accuracy and runtime on demand, i.e., we
can take the result of any stage as output and cancel
the following processing. This is called anytime com-
putational approach in (Wang et al., 2019b).
The hierarchical CTF matching scheme is effi-
cient, which results from two reasons. For one thing,
it performs correspondence search hierarchically —
it first searches for a rough disparity value in the low-
resolution stage, and then refine it by searching for
a residual disparity within a small neighborhood of
previous value in the higher resolution stage. This
strategy avoids the time-consuming full range search-
ing. For another, it upsamples the low-resolution re-
sult for the initialization in the higher resolution stage,
i.e., it propagates the result of a pixel to its neigh-
borhoods. Compared to performing a hierarchical
search in full resolution, this strategy further reduces
the computational overhead. However, this strategy
leads to a drawback — it introduces errors to the dis-
parity boundary in the upsampling process. This is
because the high-frequency information is lost in the
low-resolution disparity and cannot be recovered by
naive upsampling.
To overcome this drawback, we propose to replace
the naive upsampling method with the dynamic up-
sampling modules. The proposed module first gener-
ates dynamic upsampling kernels for each pixel in the
high-resolution disparity. The dynamic upsampling
kernels are inferred from the high-resolution feature
map. They are both sample and spatial variant, un-
like conventional upsampling kernels. In this way, the
high-frequency information can be encoded in the dy-
namic upsampling kernels and recovered in the high-
resolution disparity by the dynamic upsampling pro-
cess effectively.
For the multi-resolution feature maps extraction,
we propose an efficient hourglass-shaped feature ex-
tractor MobileNetV3-Up based on the latest Mo-
bileNetV3. Compared to original MobileNetV3, our
feature extractor aggregates the multi-scale features,
allowing the network to exploit multi-scale context in-
formation, which is essential for the stereo matching
process.
The proposed network performs stereo matching
and dynamic upsampling alternately, where the re-
sults of any stage can be taken as output (Figure 1). It
can process 1242×375 resolution image with a frame
rate range from 35 to 68 FPS on a mid-end GeForce
GTX 1660 GPU, depending on which output is fi-
nally adopted. We refer our network as LiteStereo
since it is designed to be lightweight. We evalu-
ate LiteStereo on multiple stereo benchmark datasets.
The results show that it outperforms all competitive
baselines with comparable runtime.
2 RELATED WORKS
Stereo Matching. Stereo matching, or depth from
stereo, is a long-standing computer vision task that
has been studied for decades (Barnard and Fischler,
1982). Detailed surveys can be found in (Scharstein
and Szeliski, 2002; Hamzah and Ibrahim, 2016). A
stereo matching pipeline typically consists of four
steps: (1) matching costs volume computation, (2)
cost volume aggregation, (3) disparity estimation,
and (4) optional disparity refinement (Scharstein and
Szeliski, 2002; Hamzah and Ibrahim, 2016). Re-
cently deep convolutional neural networks have been
adopted for stereo matching and achieve great suc-
cess, where most successful network designs also fol-
low the classical pipeline (Kendall et al., 2017; Chang
and Chen, 2018; Khamis et al., 2018; Yin et al.,
2019). Hierarchical Coarse-To-Fine (CTF) match-
ing is an essential strategy in stereo matching (Quam,
1987), since it reduces both computational complex-
ity and matching ambiguity. HD3 (Yin et al., 2019)
proposes a stereo network following this strategy and
achieve state-of-the-art performance. MADNet (To-
nioni et al., 2019) proposes a real-time self-adaptive
network which can perform online adaptation in real-
time. Our work also adopts the hierarchical CTF
matching strategy to achieve real-time processing.
Efficient Backbone Networks. Like the networks
for many other tasks, such as image classification (He
et al., 2016), object detection (Lin et al., 2017) and
pose estimation (Sun et al., 2019), stereo match-
ing networks also need a backbone network for fea-
ture extraction. Efficient backbone networks have
been an active research area in recent years. Mo-
bileNet (Howard et al., 2017) improves computa-
tion efficiency substantially by introducing depth-
wise separable convolution. The following work Mo-
bileNet V2 (Sandler et al., 2018) employs a resource-
efficient block with inverted residuals and linear bot-
tlenecks. MobileNet V3 (Howard et al., 2019) uses
a combination of these layers as building blocks
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
702
Stereo
Matching
MobileNet
V3-Up
Feature
Extractor
Stereo
Matching
Stereo
Matching
Warping
Warping
𝐷
𝑠𝑡
4
𝐷
𝑟𝑒𝑠
3
𝐷
𝑟𝑒𝑠
2
Dynamic
Upsampling
Dynamic
Upsampling
Dynamic
Upsampling
𝐷
𝑢𝑝
3
𝐷
𝑢𝑝
2
𝐷
𝑢𝑝
0
𝐷
𝑠𝑡
3
𝐷
𝑠𝑡
2
1/2
4
1/2
3
1/2
2
1/2
0
𝐼
𝐿
𝐼
𝑅
Input: Stereo Image Pair
Left feature flow Right feature flow Upsampled disp.
Stage 1
Stage 2
Stage 3
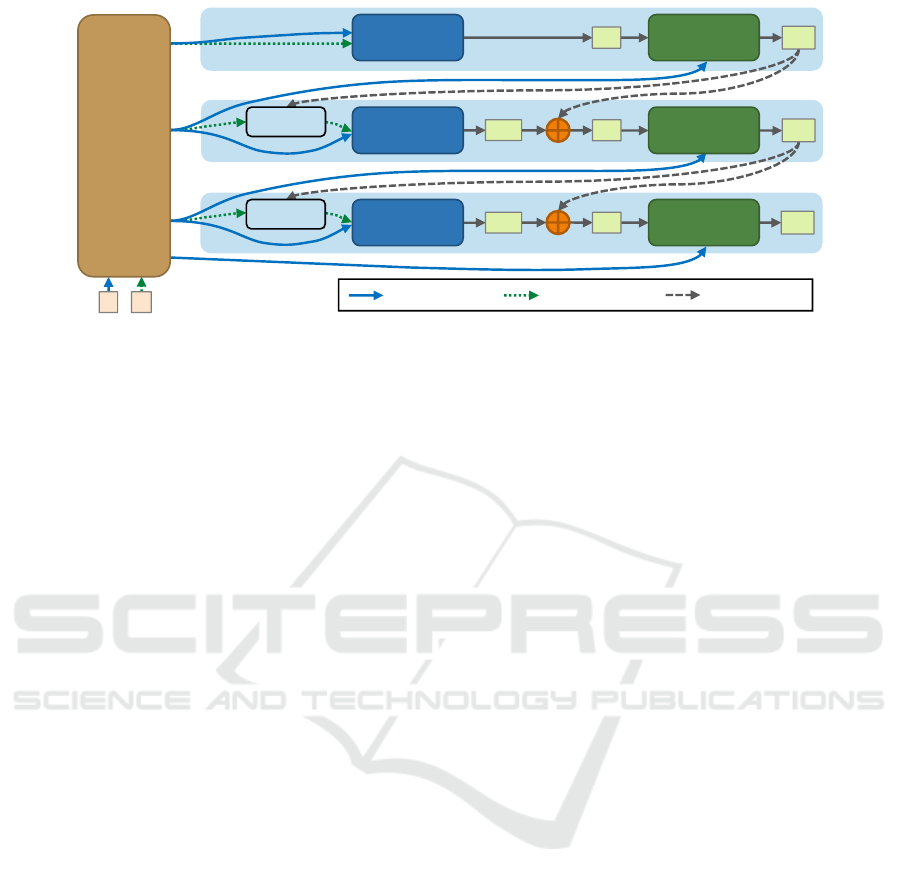
Figure 1: Network architecture of LiteStereo, which consists of a pyramid feature extractor and three stages for stereo match-
ing and dynamic upsampling. D
l
denotes the disparity map with the scale of 1/2
l
. The dynamic upsampling ratio is 2 for
Stage 1 & 2, and 4 for Stage 3. See text for details.
and exploits network architecture search algorithms
for network design. Apart from MobileNet fam-
ily, there are other efficient backbone networks like
SqueezeNet (Iandola et al., 2016), ShuffleNet (Zhang
et al., 2018), ShiftNet (Wu et al., 2018), etc.
Depth Image Upsampling. As pointed out above, we
need a more elaborate upsampling method to recover
the high-frequency information in the upsampled dis-
parity so as to avoid the edge blurring effect. There
are many works on depth image upsampling (Eich-
hardt et al., 2017). Joint upsampling approaches (Li
et al., 2016; Hui et al., 2016) use feature maps as
guidance by merely concatenating the feature maps
of the color image and the depth image. PAC (Su
et al., 2019) predicts spatially varying kernels from
the guidance and applies them to the feature maps of
depth image for upsampling. Our dynamic upsam-
pling module is more concise and closely integrated
with the hierarchical CTF framework.
3 METHODOLOGY
The architecture overview of the proposed LiteStereo
is shown in Figure 1. The network takes a stereo
image pair I
L
,I
R
as input, and output six disparity
maps D
4
st
,D
3
up
,D
3
st
,D
2
up
,D
2
st
,D
0
up
with different accu-
racy successively, where the superscript of D
l
denotes
that the resolution is 1/2
l
of the full one, and st, up
denote that the disparity is produced by stereo match-
ing module and dynamic upsampling module respec-
tively.
For each input image, the MobileNetV3-Up fea-
ture extractor computes a feature pyramid that con-
sists of feature maps of different scales (1/16, 1/8,
1/4, 1). For a better trade-off between accuracy and
runtime, all computation is performed on demand.
For example, when we start with the stereo matching
module in Stage 1, only the features with the scale
of 1/2
4
are computed. This stereo matching module
produces a coarse disparity map D
4
st
as the first output
of the network. If time is permitted, we continue with
the dynamic upsampling module in Stage 1. At this
time, the feature computation in MobileNetV3-Up re-
sumes from where it has stopped and outputs the left
image feature with a scale of 1/2
3
. The dynamic up-
sampling module increases the resolution of D
4
st
and
produces an upsampled disparity map D
3
up
with higher
resolution and accuracy.
Stage 2 follows a similar process as Stage 1, ex-
cept that it uses the disparity D
3
up
from the previous
stage as initialization, which is achieved by the warp-
ing operation. The output of the stereo matching mod-
ule in Stage 2 is a residual disparity D
3
res
, which is
added to the initial disparity D
3
up
to obtain the whole
disparity D
3
st
. Stage 3 follows the same process, in
which the stereo disparity map D
2
st
is upsampled to
full resolution D
0
up
via the dynamic upsampling mod-
ule with an upsampling ratio of 4.
In the rest of this section, we will introduce the de-
tails of the feature extractor, stereo matching module,
and dynamic upsampling module.
3.1 Feature Extractor
In order to keep the network lightweight and efficient,
we adopt the latest MobileNetV3 (Howard et al.,
2019) as backbone for feature extraction. However,
the original MobileNetV3 is not suitable for the stereo
matching task. Since stereo matching is a pixel-to-
pixel task, high spatial resolution feature maps are
required for matching cost evaluation. However, the
A Lightweight Real-time Stereo Depth Estimation Network with Dynamic Upsampling Modules
703
high-resolution features in MobileNetV3 are in shal-
low layers, which means their receptive fields are
small and lack semantic information. Therefore, in-
spired by the U-Net (Ronneberger et al., 2015), we
add an expansion part to MobileNetV3 to aggregate
the low-scale feature with the high-scale one, so as
to exploit the context information from a larger re-
ceptive field and obtain more semantic meaning. We
use a single 3 × 3 2D convolution layer for feature
aggregation. Thus, the increased computation over-
head is slight. The detailed network architecture can
be found in Table 1, where Operator 1-6 are the same
as in MobileNetV3-Small (Howard et al., 2019).
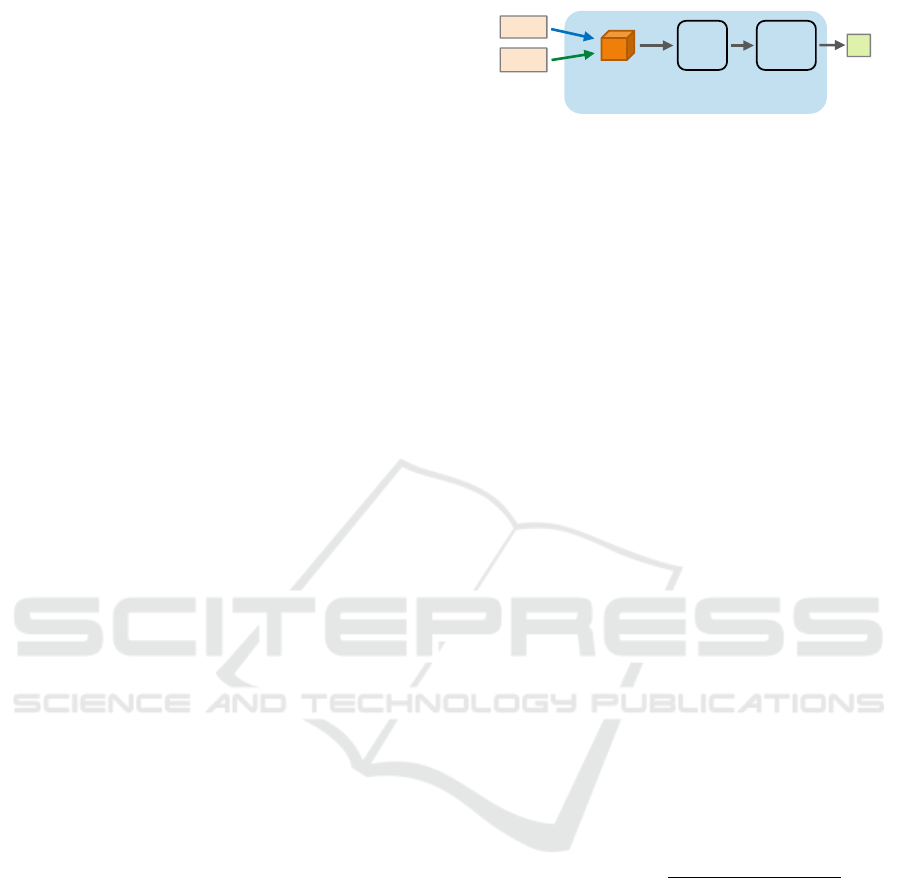
3.2 Stereo Matching Module
The architecture of the stereo matching module is il-
lustrated in Figure 2. The stereo matching module
takes as input the left and (warped) right feature maps
in order to compute a disparity map. Note that the
right feature maps for Stage 2 & 3 are warped accord-
ing to the disparity of previous stage:
F
l
R,wp
(x,y) = F
l
R
(x + D
l
init
(x,y),y), (1)
where F
l
R,wp
denotes the wraped feature map, F
l
R
de-
notes the right feature map, D
l
init
denotes the disparity
map for initialization, x,y denote the horizontal and
vertical coordinates on the 2D image plane, the super-
script l denotes the scale 1/2
l
. The right feature map
for Stage 1 does not need to be warped since no previ-
ous disparity is available. This is equivalent to warp-
ing with an all-zero disparity map, i.e., F
l
R,wp
= F
l
R
.
The stereo matching consists of three steps:
1) Cost Volume Computation. Given the left F
l
L
and warped right feature maps F
l
R,wp
, the module first
computes a preliminary cost volume C
l
pre
:
C
l
pre
(c,d,x, y) = F
l
L
(c,x,y) − F
l
R,wp
(c,x + d,y), (2)
where c denotes the index of feature channels, d de-
notes the disparity, x, y denote the horizontal and ver-
tical coordinates on the 2D image plane.
The resulting cost volume is a 4D volume with
size C × D × H × W , where C denotes the number
of feature channels of the feature map, D denotes the
number of disparities under consideration, H ×W is
the size of feature maps. The C
l
pre
(:,d,x, y) entry is
a distance vector that describes the matching cost be-
tween the two pixels F
l
L
(x,y) and F
l
R,wp
(x + d,y).
The search range (the disparities under considera-
tion) ranges from 0 to 11 for Stage 1, and from -2 to 2
for Stage 2 & 3. Note that the search range in a low-
scale feature map is equivalent to 2
l
times of it in the
full resolution feature map. For example, the search
𝐹
𝐿
𝐹
𝑅,𝑤𝑝
Left/right
Feature Maps
Cost Volume
Computaiton
3D
Conv
Cost Volume
Aggregation
Soft
argmin
Disparity
Estimation
𝐷
Output
Disparity
Figure 2: Stereo matching module that performs stereo
matching between the left feature map and the (warped)
right feature map. See text for details.
range ±2 for Stage 2 / 3 is equivalent to ±16/ ± 8
pixel in the full resolution.
2) Cost Volume Aggregation. The preliminary cost
volume usually is noisy due to the matching ambigu-
ity, occlusion, or blurring in the input images. To re-
duce the noise, a cost volume aggregation step is often
applied (Hamzah and Ibrahim, 2016). We implement
the cost volume aggregation with 3D convolutional
layers (Chang and Chen, 2018). We expect the 3D
CNN learns to locally aggregate the cost by exploit-
ing the context information, and produces a 3D cost
volume with the size of D ×H ×W . The details of 3D
CNN can be found in Table 1.
3) Disparity Estimation. Given the estimated 3D
cost volume C
l
, a naive way to estimate the dispar-
ity map would be the winner-take-all (WTA) strategy,
where the disparity with the lowest cost would be cho-
sen as the output:
D(x,y) = argmin
d
C
l
(d,x,y). (3)
However, the WTA strategy cannot provide disparity
with sub-pixel accuracy. Moreover, it blocks most of
the backward propagation path during network train-
ing due to the non-differentiable argmin operation.
Therefore, we adopt the soft argmin for disparity es-
timation as suggested by (Kendall et al., 2017):
D
l
res
(x,y) =
∑
d
d ·
exp(−C
l
(d,x,y))
∑
d
0
exp(−C
l
(d
0
,x,y))
. (4)
The estimated disparity residual D
l
res
is added to the
initial disparity D
l
init
to obtain whole disparity D
l
st
.
Again, since there is no initial disparity for Stage 1,
we have D
4
res
= D
4
st
at Stage 1.
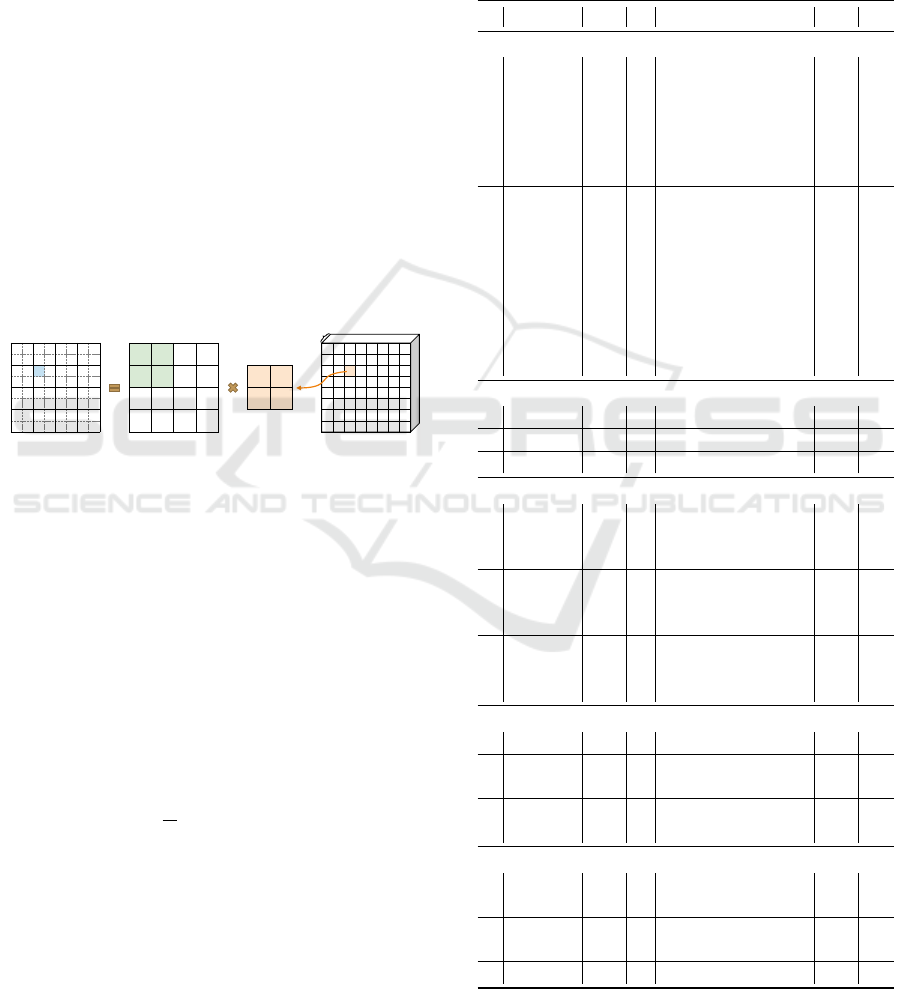
3.3 Dynamic Upsampling Module
The proposed dynamic upsampling module is in-
spired by (Jia et al., 2016; Wang et al., 2019a). The
dynamic upsampling process is demonstrated in Fig-
ure 3. Each pixel in upsampled disparity is calcu-
lated as the weighted sum of the supported window
in low-resolution disparity centered at the reference
pixel, where the weights are defined by the predicted
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
704
dynamic kernel. In order to achieve minimal compu-
tational overhead, we use a 2 × 2 kernel size for dy-
namic upsampling, which is similar to bilinear inter-
polation, except that the kernel weights are generated
by 2D convolutional layers. The key insight of our
dynamic upsampling module is that we predict dy-
namic upsampling kernels from the high-resolution
feature map. The predicted kernels are both sample
and spatial variant, preserving the high-frequency in-
formation. With the predicted kernels, the finer de-
tails of the disparity map can be recovered in the
dynamic upsampling process. More specifically, the
predicted dynamic kernel matrix is a 4-channel fea-
ture map with the same resolution of upsampled dis-
parity. The kernel weights for each pixel are normal-
ized with softmax. The module detail can be found in
Table 1. If computational overhead is permitted, the
kernel size can be easily changed to a large size. For
example, we can use a 3 × 3 kernel size, and the pre-
dicted dynamic kernel matrix should be a 9-channel
feature map. The upsamping scale factor is 2 for
Stage 1 & 2, and 4 for Stage 3.
*
*
*
4 channels
Upsampled
Disparity
(2H × 2W)
Low Resolution
Disparity
(H × W)
Dynamic
Kernel
(2 × 2)
Dynamic
Kernel Matrix
(4 × 2H × 2W)
Figure 3: Dynamic upsampling process with a scale factor
of 2. Each pixel in upsampled disparity is calculated as the
weighted sum of the supported window in low resolution
disparity centered at the reference pixel, where the weights
are defined by the predicted dynamic kernel matrix.
3.4 Loss Function
The network outputs the results of Operator {28, 34,
30, 36, 32, 37} successively, which correspond to
{D
4
st
,D
3
up
,D
3
st
,D
2
up
,D
2
st
,D
0
up
}. We upsample all out-
puts to full resolution with bilinear interpolation, and
compute the loss for each output disparity map:
L (d,
ˆ
d) =
1
N
N
∑
i=1
smooth
L1
(d
i
−
ˆ
d
i
), (5)
where d denotes the ground truth disparity, and
ˆ
d de-
notes the predicted disparity, N denotes the number
of labeled pixels, smooth
L1
denotes the smooth L1
loss function (Girshick, 2015). The losses for differ-
ent outputs are weighted differently, with weights of
0.25, 0.5, 1 for Stage 1, 2, 3 respectively.
Table 1: Network architecture of LiteStereo. s
in
,s
out
denote
the scale of input and output. c
in
,c
out
denote the number
of channels of input and output. (·,·) denotes concatena-
tion of two inputs. ·[:k] denotes taking the first k channels
as input. ‘2x’ and ‘4x’ before the upsampling method de-
notes the upsampling scale. ‘conv3d x4’ denotes the layer
replicating four times with independent weights. The bold
number indicates the incoming skip link from nonsequential
layers.
# Input s
in
c
in
Operator s
out
c
out
MobileNetV3-Up Fearute Extractor
1 Image 1 3 conv2d, 3x3, stride 2 1/2 16
2 1 1/2 16 bneck, 3x3, stride 2 1/2
2
16
3 2 1/2
2
16 bneck, 3x3, stride 2 1/2
3
24
4 3 1/2
3
24 bneck, 3x3, stride 1 1/2
3
24
5 4 1/2
3
24 bneck, 3x3, stride 2 1/2
4
40
6 5 1/2
4
40 bneck, 3x3, stride 1 1/2
4
40
7 6 1/2
4
40 2x bilinear upsample 1/2
3
40
8 (4,7) 1/2
3
64 conv2d, 3x3, stride 1 1/2
3
24
9 8 1/2
3
24 2x bilinear upsample 1/2
2
24
10 (2,9) 1/2
2
40 conv2d, 3x3, stride 1 1/2
2
16
11 10[:4] 1/2
2
4 2x bilinear upsample 1/2 4
12 (1[:4],11) 1/2 8 conv2d, 3x3, stride 1 1/2 4
13 12 1/2 4 2x bilinear upsample 1 4
14 Image 1 3 conv2d, 3x3, stride 1 1 4
15 (13,14) 1 8 conv2d, 3x3, stride 1 1 4
Cost Volume Computation
16 6 1/2
4
40 build cost vol. 1/2
4
40
17 34 & 8 1/2
3
24 warp, build cost vol. 1/2
3
24
18 36 & 10 1/2
2
16 warp, build cost vol. 1/2
2
16
Cost Volume Aggregation
19 16 1/2
4
40 conv3d, 3x3x3 1/2
4
16
20 19 1/2
4
16 conv3d x4, 3x3x3 1/2
4
16
21 20 1/2
4
16 conv3d, 3x3x3 1/2
4
1
22 17 1/2
3
24 conv3d, 3x3x3 1/2
3
4
23 22 1/2
3
4 conv3d x4, 3x3x3 1/2
3
4
24 23 1/2
3
4 conv3d, 3x3x3 1/2
3
1
25 18 1/2
2
16 conv3d, 3x3x3 1/2
2
4
26 25 1/2
2
4 conv3d x4, 3x3x3 1/2
2
4
27 26 1/2
2
4 conv3d, 3x3x3 1/2
2
1
Disparity Estimation
28 21 1/2
4
12 soft argmin 1/2
4
1
29 24 1/2
3
5 soft argmin 1/2
3
1
30 29 & 34 1/2
3
5 sum 1/2
3
1
31 27 1/2
2
5 soft argmin 1/2
2
1
32 31 & 36 1/2
2
5 sum 1/2
2
1
Dynamic Upsampling
33 8[:12] 1/2
3
12 conv2d, 3x3, stride 1 1/2
3
4
34 33 & 28 1/2
4
1 2x dynamic upsamp. 1/2
3
1
35 10[:8] 1/2
2
8 conv2d, 3x3, stride 1 1/2
2
4
36 35 & 30 1/2
3
1 2x dynamic upsamp. 1/2
2
1
37 15 & 32 1/2
2
1 4x dynamic upsamp. 1 1
A Lightweight Real-time Stereo Depth Estimation Network with Dynamic Upsampling Modules
705

4 EXPERIMENTS
In this section, we evaluate our method on differ-
ent datasets and compare it with existing stereo algo-
rithms on accuracy and runtime and show that we can
achieve high-quality results and high frame rate. In
addition, we conduct ablation studies to demonstrate
the effectiveness of our network designs.
4.1 Experiment Details
4.1.1 Datasets
We trained and evaluated our method on three stereo
datasets:
1) Scene Flow (Mayer et al., 2016): a large syn-
thetic dataset containing 35454 training and 4370 test-
ing stereo image pairs, where the size of the image is
960 × 540 pixels, and the provided ground truth dis-
parity maps are dense.
2) KITTI 2012 (Geiger et al., 2012): a real-world
dataset containing 194 training and 195 testing stereo
image pairs, where the size of image is 1242 × 375
pixels, and the provided ground truth disparity maps
are sparse.
3) KITTI 2015 (Menze and Geiger, 2015): a real-
world dataset containing 200 training and 200 test-
ing stereo image pairs, where the size of the image
is 1242 × 375 pixels, and the provided ground truth
disparity maps are sparse.
4.1.2 Training Details
We implement the proposed network LiteStereo with
PyTorch, where the detailed network architecture is
shown in Table 1. Our model is trained end-to-end
using Adam (Kingma and Ba, 2014) (β
1
= 0.9, β
2
=
0.999) with a batch size of 6. Color normalization
is applied to the entire dataset for data preprocessing.
As for training set data augmentation, we randomly
crop the image to size H = 256 and W = 512.
Since the two KITTI datasets are too small for
training, we first train our model on the Scene Flow
dataset and then fine-tune it on the two KITTI datasets
respectively before evaluating on them. Before train-
ing, the weights of the front part of the MobileNetV3-
Up feature extractor (Operator 1-6 in Table 1) are ini-
tialized from the ImageNet pretrained MobileNetV3-
Small model (Howard et al., 2019) and then frozen.
On the Scene Flow dataset, the model is trained
for 10 epochs in total with a constant learning rate of
5 × 10
−4
. The frozen weights are unfrozen after one
training epoch. For the KITTI datasets, we fine-tune
the model pretrained on the SceneFlow dataset for
300 epochs with an initial learning rate of 5 × 10
−4
.
The learning rate is reduced to 5 × 10
−5
after the
200th epoch. The results on KITTI datasets are av-
eraged over five randomized 80/20 train/validation
splits, which follows the evaluation protocol in (Wang
et al., 2019b).
4.1.3 Baseline Comparison
We compare our method with other four real-time
stereo matching methods: StereoNet (Khamis et al.,
2018), AnyNet (Wang et al., 2019b), MADNet (To-
nioni et al., 2019), and DispNet (Mayer et al., 2016),
where the comparison focuses on both disparity ac-
curacy and inference time. We compare different
methods only on KITTI 2012 & 2015 datasets, since
some methods did not report their results on Scene-
Flow, or the evaluation protocols are different from
each other. For a fair comparison, we perform infer-
ence with each network on the same computer with a
GeForce GTX Titan X GPU to estimate the average
runtime, where the input is a stereo image pair with
the resolution of 1242 × 375. Note that the GeForce
GTX Titan X with Maxwell
TM
architecture we used
is significantly inferior to the NVIDIA TITAN X with
Pascal
TM
architecture, although they have very simi-
lar names. As for the disparity accuracy, we adopt the
performance results reported in the original papers.
4.2 Experiment Results
Here, we first show the qualitative and quantitative
results of our LiteStereo on different datasets and then
compare our method with other baselines.
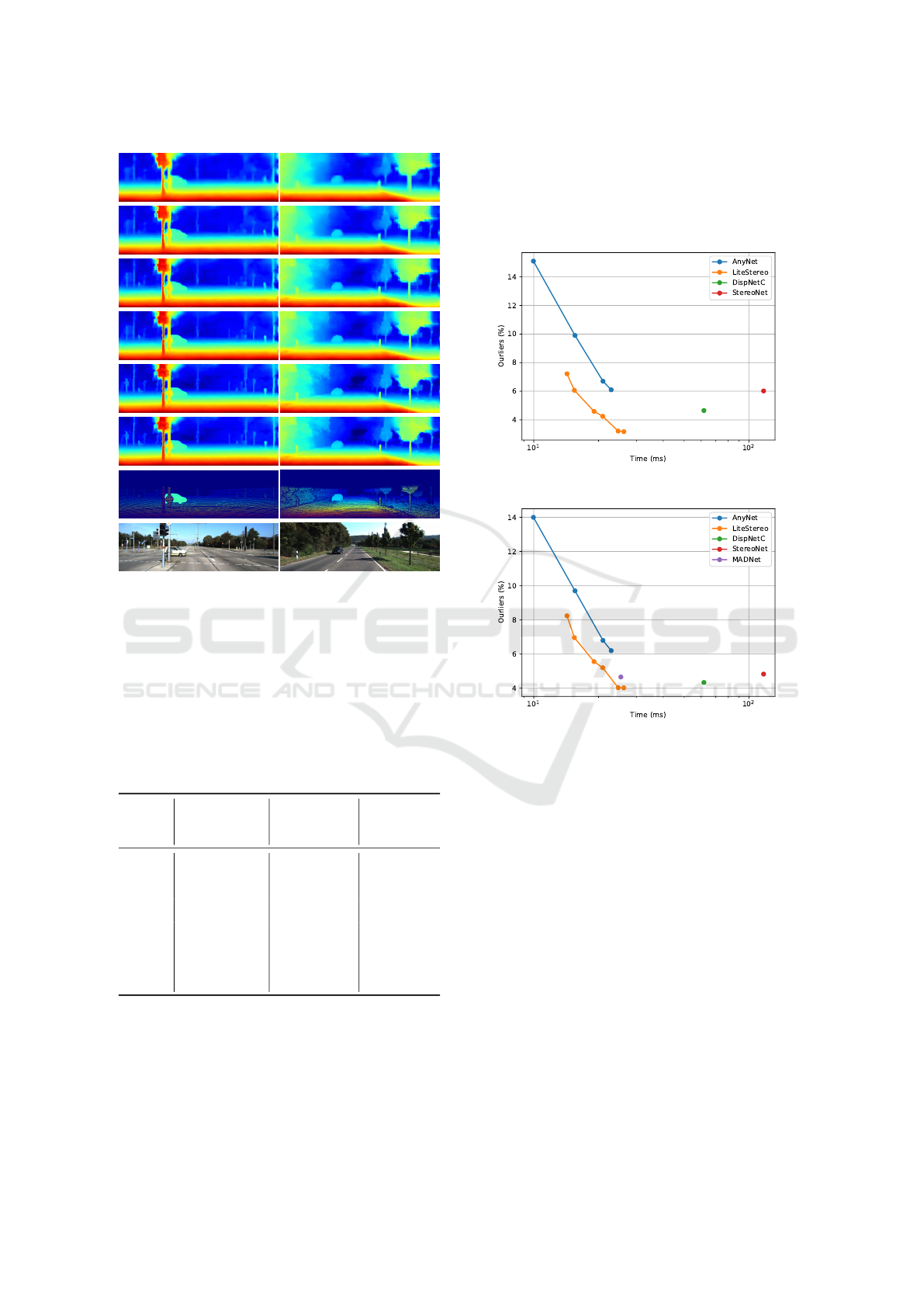
The qualitative results on KITTI 2015 can be
found in Figure 4. The percentage of outliers is
indicated in the figure. We only count outliers if
the disparity or flow exceeds 3 pixels and 5% of its
true value, which is consistent with KITTI 2015 pa-
per (Menze and Geiger, 2015). Since the prediction is
refined step by step, as more inference time is given,
more accurate results we get. Different trade-offs be-
tween accuracy and runtime can be achieved on de-
mand using one model. The quantitative results on
KITTI 2012 & 2015 and SceneFlow can be found
in Table 2. The outlier rate is used for KITTI, and
End-Point-Error (EPE) is used for SceneFlow. We
can see that the dynamic upsampling module can ef-
ficiently improve the accuracy with a small compu-
tational overhead. The improvement of the dynamic
upsampling module of the last stage is still signif-
icant on the SceneFlow dataset but not on KITTI
datasets. A reasonable explanation is that the ground
truth of KITTI datasets lacks valid pixels on the dis-
parity discontinuity due to its sparsity. Thus the dy-
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
706
Error=9.66%
Error=9.66%
Error=9.66%
Error=9.66%
Error=9.66%
Error=9.66%
Error=9.66%
Error=9.66%
Error=9.66%
Error=9.66%
Error=9.66%
Error=9.66%
Error=9.66%
Error=9.66%
Error=9.66%
Error=9.66%
Error=9.66%
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
Error=9.59%
Error=9.59%
Error=9.59%
Error=9.59%
Error=9.59%
Error=9.59%
Error=9.59%
Error=9.59%
Error=9.59%
Error=9.59%
Error=9.59%
Error=9.59%
Error=9.59%
Error=9.59%
Error=9.59%
Error=9.59%
Error=9.59%
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
D
4
st
Error=6.83%
Error=6.83%
Error=6.83%
Error=6.83%
Error=6.83%
Error=6.83%
Error=6.83%
Error=6.83%
Error=6.83%
Error=6.83%
Error=6.83%
Error=6.83%
Error=6.83%
Error=6.83%
Error=6.83%
Error=6.83%
Error=6.83%
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
Error=6.39%
Error=6.39%
Error=6.39%
Error=6.39%
Error=6.39%
Error=6.39%
Error=6.39%
Error=6.39%
Error=6.39%
Error=6.39%
Error=6.39%
Error=6.39%
Error=6.39%
Error=6.39%
Error=6.39%
Error=6.39%
Error=6.39%
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
D
3
up
Error=6.11%
Error=6.11%
Error=6.11%
Error=6.11%
Error=6.11%
Error=6.11%
Error=6.11%
Error=6.11%
Error=6.11%
Error=6.11%
Error=6.11%
Error=6.11%
Error=6.11%
Error=6.11%
Error=6.11%
Error=6.11%
Error=6.11%
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
Error=4.68%
Error=4.68%
Error=4.68%
Error=4.68%
Error=4.68%
Error=4.68%
Error=4.68%
Error=4.68%
Error=4.68%
Error=4.68%
Error=4.68%
Error=4.68%
Error=4.68%
Error=4.68%
Error=4.68%
Error=4.68%
Error=4.68%
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
D
3
st
Error=4.43%
Error=4.43%
Error=4.43%
Error=4.43%
Error=4.43%
Error=4.43%
Error=4.43%
Error=4.43%
Error=4.43%
Error=4.43%
Error=4.43%
Error=4.43%
Error=4.43%
Error=4.43%
Error=4.43%
Error=4.43%
Error=4.43%
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
Error=3.25%
Error=3.25%
Error=3.25%
Error=3.25%
Error=3.25%
Error=3.25%
Error=3.25%
Error=3.25%
Error=3.25%
Error=3.25%
Error=3.25%
Error=3.25%
Error=3.25%
Error=3.25%
Error=3.25%
Error=3.25%
Error=3.25%
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
D
2
up
Error=2.86%
Error=2.86%
Error=2.86%
Error=2.86%
Error=2.86%
Error=2.86%
Error=2.86%
Error=2.86%
Error=2.86%
Error=2.86%
Error=2.86%
Error=2.86%
Error=2.86%
Error=2.86%
Error=2.86%
Error=2.86%
Error=2.86%
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
Error=1.75%
Error=1.75%
Error=1.75%
Error=1.75%
Error=1.75%
Error=1.75%
Error=1.75%
Error=1.75%
Error=1.75%
Error=1.75%
Error=1.75%
Error=1.75%
Error=1.75%
Error=1.75%
Error=1.75%
Error=1.75%
Error=1.75%
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
D
2
st
Error=2.78%
Error=2.78%
Error=2.78%
Error=2.78%
Error=2.78%
Error=2.78%
Error=2.78%
Error=2.78%
Error=2.78%
Error=2.78%
Error=2.78%
Error=2.78%
Error=2.78%
Error=2.78%
Error=2.78%
Error=2.78%
Error=2.78%
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
Error=1.73%
Error=1.73%
Error=1.73%
Error=1.73%
Error=1.73%
Error=1.73%
Error=1.73%
Error=1.73%
Error=1.73%
Error=1.73%
Error=1.73%
Error=1.73%
Error=1.73%
Error=1.73%
Error=1.73%
Error=1.73%
Error=1.73%
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
D
0
up
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
GroundTruth
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
LeftImage
(a) (b)
Figure 4: Qualitative results on KITTI2015. The notations
of six outputs correspond to those in Figure 1. The pre-
diction is refined step by step. Different trade-offs between
accuracy and runtime can be achieved on demand in one
model. Error denotes the percentage of outliers. Zoom in to
see the details.
Table 2: Runtime and outlier(%) of LiteStereo on KITTI-
2012 / KITTI-2015 datasets and EPE on SceneFlow. Lower
values are better. Runtime is measured on KITTI dataset.
“Incr.” denotes the increased time since last output, “Acc.”
denotes the accumulated time from beginning.
Time (ms) Outliers (%) EPE (px)
Output Incr. Acc. 2012 2015 SceneFlow
1. D
4
st
14.27 14.27 7.22 8.24 3.49
2. D
3
up
1.18 15.45 6.06 6.96 2.80
3. D
3
st
3.61 19.06 4.59 5.56 2.51
4. D
2
up
1.86 20.91 4.25 5.20 2.18
5. D
2
st
3.75 24.67 3.21 4.03 1.95
6. D
0
up
1.55 26.21 3.18 4.03 1.74
namic upsampling kernel CNN fails to learn reason-
able weights for the upsampling kernel prediction to
produce an accurate disparity boundary.
The comparison with other baseline is demon-
strated in Figure 5. The outlier rate is used as the met-
ric. Our method achieves a better accuracy-runtime
trade-off than all competitive real-time baselines. We
can achieve lower error rates within less runtime.
LiteStereo does not rely on any customized operator
or CUDA C/C++ programming, making it easy to be
deployed on other platforms such as mobile phones.
(a) Comparisons on KITTI 2012 dataset.
(b) Comparisons on KITTI 2015 dataset.
Figure 5: Comparisons of different baselines on KITTI
datasets. The outlier rate is used as the metric. The time
axis is logarithmic axes.
4.3 Ablation Studies
We conduct ablation studies to examine the impact of
different components of the LiteStereo network. We
evaluate different variants of our model on the Scene-
Flow dataset.
4.3.1 Feature Extractor
As described in Section 3.1, we add an expansion part
to MobileNetV3 to aggregate the multi-scale features.
In the first ablation study, we remove the expansion
part and directly use MobileNetV3 (Operator 1-6 in
Table 1) as the feature extractor. We compare the per-
formance of MobileNetV3 and MobileNetV3-Up. To
avoid being disturbed by dynamic upsampling mod-
ule, we use a bilinear upsampler in this ablation study.
A Lightweight Real-time Stereo Depth Estimation Network with Dynamic Upsampling Modules
707
Table 3: EPE of LiteStereo with different settings evalu-
ated on SceneFlow. The number in the parentheses denotes
the reduction of EPE w.r.t. last output. “FeatExt” denotes
Feature Extractor, “feat gui” denotes feature guided joint
upsampling, “dyn up” denotes dynamic upsampling.
FeatExt MobileNetV3 MobileNetV3-Up
Upsampler bilinear bilinear feat gui dyn up
1. D
4
st
3.46 3.56 3.51 3.49
2. D
3
up
- - 3.38 2.80
3. D
3
st
2.84 (-0.62) 2.86 (-0.70) 2.84 2.51
4. D
2
up
- - 2.80 2.18
5. D
2
st
2.52 (-0.32) 2.43 (-0.43) 2.37 1.95
6. D
0
up
- - 2.41 1.74
The results is reported in Table 3. As shown in
the table, MobileNetV3 results in higher error than
MobileNetV3-Up at high-resolution output. This is
because the high-resolution features of MobileNetV3
are in shallow layers and unable to aggregate enough
context information. The resulting feature vectors for
the pixels do not contain enough information to be
distinguished from each other, which leads to am-
biguity in the stereo matching process. The feature
maps for the stereo matching module in Stage 1 are
produced in the same layer in both MobileNetV3 and
MobileNetV3-Up, which are generated by the Opera-
tor 6 in Table 1. Thus, there is no deterioration in the
first output D
4
st
even if the MobileNetV3 is used.
4.3.2 Dynamic Upsampling Module
In order to demonstrate the effectiveness of the dy-
namic upsampling module, we compare it with tradi-
tional bilinear upsampler and a feature guided joint
upsampling method. The guided joint upsampling
module first upsample the disparity and concatenate
it with a feature. Then, a 2D convolutional layer is
applied to it for disparity refinement. We design the
guided joint upsampling module with a similar com-
putational overhead as the dynamic upsampling mod-
ule. MobileNetV3-Up is used as feature extractor.
The results are reported in Table 3. As shown in
the table, the feature guided joint upsampling only
achieves a slightly smaller error (2.37) than traditional
bilinear (2.43) at the output D
2
st
, while our dynamic
upsampling achieve significantly lower errors than
feature guided upsampling at all outputs. We con-
clude that under such strict computational limitations,
dynamic upsampling is better than feature guided up-
sampling.
5 CONCLUSIONS
In this paper, we have proposed a lightweight effi-
cient stereo matching network for disparity estima-
tion in real-time applications. Our network adopts the
efficient hierarchical Coarse-To-Fine (CTF) matching
scheme. We can take the result of any stage as output
to achieve different trade-offs between accuracy and
runtime on demand in one model. We propose an effi-
cient hourglass-shaped feature extractor based on the
latest MobileNetV3, which is able to aggregate more
context information from different scales. We also
propose to replace the traditional upsampling method
in the CTF matching scheme with the learning-based
dynamic upsampling modules, which improves the
accuracy significantly with little extra overhead. In
the future, we are going to implement our network
on the mobile phone for further downstream applica-
tions.
ACKNOWLEDGEMENTS
Steven Zhiying Zhou was supported by National Key
Research and Development Program of China under
2018YFB1004904; Science and Technology Program
of Suzhou City under SYG201920. Jimin Xiao was
supported by National Natural Science Foundation of
China under 61972323; Key Program Special Fund
in XJTLU under KSF-T-02, KSF-P-02. The compu-
tational work for this article was partially performed
on resources of the National Supercomputing Centre,
Singapore (https://www.nscc.sg).
REFERENCES
Alexiadis, D. S., Zarpalas, D., and Daras, P. (2012). Real-
time, full 3-d reconstruction of moving foreground ob-
jects from multiple consumer depth cameras. IEEE
Transactions on Multimedia, 15(2):339–358.
Alhaija, H. A., Mustikovela, S. K., Mescheder, L., Geiger,
A., and Rother, C. (2018). Augmented reality meets
computer vision: Efficient data generation for urban
driving scenes. International Journal of Computer Vi-
sion, 126(9):961–972.
Barnard, S. T. and Fischler, M. A. (1982). Computational
stereo. ACM Computing Surveys (CSUR), 14(4):553–
572.
Chang, J.-R. and Chen, Y.-S. (2018). Pyramid stereo match-
ing network. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
5410–5418.
Cheng, X., Wang, P., and Yang, R. (2019). Learning depth
with convolutional spatial propagation network. IEEE
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
708

transactions on pattern analysis and machine intelli-
gence.
Eichhardt, I., Chetverikov, D., and Janko, Z. (2017). Image-
guided tof depth upsampling: a survey. Machine Vi-
sion and Applications, 28(3-4):267–282.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? the kitti vision benchmark
suite. In 2012 IEEE Conference on Computer Vision
and Pattern Recognition, pages 3354–3361. IEEE.
Girshick, R. (2015). Fast r-cnn. In Proceedings of the IEEE
international conference on computer vision, pages
1440–1448.
Hamzah, R. A. and Ibrahim, H. (2016). Literature survey
on stereo vision disparity map algorithms. Journal of
Sensors, 2016.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Howard, A., Sandler, M., Chu, G., Chen, L.-C., Chen, B.,
Tan, M., Wang, W., Zhu, Y., Pang, R., Vasudevan, V.,
et al. (2019). Searching for mobilenetv3. In Proceed-
ings of the IEEE International Conference on Com-
puter Vision, pages 1314–1324.
Howard, A. G., Zhu, M., Chen, B., Kalenichenko, D.,
Wang, W., Weyand, T., Andreetto, M., and Adam,
H. (2017). Mobilenets: Efficient convolutional neu-
ral networks for mobile vision applications. arXiv
preprint arXiv:1704.04861.
Hui, T.-W., Loy, C. C., and Tang, X. (2016). Depth map
super-resolution by deep multi-scale guidance. In Eu-
ropean conference on computer vision, pages 353–
369. Springer.
Iandola, F. N., Han, S., Moskewicz, M. W., Ashraf, K.,
Dally, W. J., and Keutzer, K. (2016). Squeezenet:
Alexnet-level accuracy with 50x fewer parame-
ters and¡ 0.5 mb model size. arXiv preprint
arXiv:1602.07360.
Izadi, S., Kim, D., Hilliges, O., Molyneaux, D., Newcombe,
R., Kohli, P., Shotton, J., Hodges, S., Freeman, D.,
Davison, A., et al. (2011). Kinectfusion: real-time 3d
reconstruction and interaction using a moving depth
camera. In Proceedings of the 24th annual ACM sym-
posium on User interface software and technology,
pages 559–568.
Jia, X., De Brabandere, B., Tuytelaars, T., and Gool, L. V.
(2016). Dynamic filter networks. In Advances in neu-
ral information processing systems, pages 667–675.
Kendall, A., Martirosyan, H., Dasgupta, S., Henry, P.,
Kennedy, R., Bachrach, A., and Bry, A. (2017). End-
to-end learning of geometry and context for deep
stereo regression. In Proceedings of the IEEE Interna-
tional Conference on Computer Vision, pages 66–75.
Khamis, S., Fanello, S., Rhemann, C., Kowdle, A.,
Valentin, J., and Izadi, S. (2018). Stereonet:
Guided hierarchical refinement for real-time edge-
aware depth prediction. In Proceedings of the Euro-
pean Conference on Computer Vision (ECCV), pages
573–590.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Li, Y., Huang, J.-B., Ahuja, N., and Yang, M.-H. (2016).
Deep joint image filtering. In European Conference
on Computer Vision, pages 154–169. Springer.
Lin, T.-Y., Doll
´
ar, P., Girshick, R., He, K., Hariharan, B.,
and Belongie, S. (2017). Feature pyramid networks
for object detection. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2117–2125.
Lucas, B. D., Kanade, T., et al. (1981). An iterative image
registration technique with an application to stereo vi-
sion.
Mancini, M., Costante, G., Valigi, P., and Ciarfuglia, T. A.
(2016). Fast robust monocular depth estimation for
obstacle detection with fully convolutional networks.
In 2016 IEEE/RSJ International Conference on Intel-
ligent Robots and Systems (IROS), pages 4296–4303.
IEEE.
Mayer, N., Ilg, E., Hausser, P., Fischer, P., Cremers, D.,
Dosovitskiy, A., and Brox, T. (2016). A large dataset
to train convolutional networks for disparity, optical
flow, and scene flow estimation. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, pages 4040–4048.
Menze, M. and Geiger, A. (2015). Object scene flow for au-
tonomous vehicles. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 3061–3070.
Quam, L. H. (1987). Hierarchical warp stereo. In Readings
in computer vision, pages 80–86. Elsevier.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In International Conference on Medical
image computing and computer-assisted intervention,
pages 234–241. Springer.
Sandler, M., Howard, A., Zhu, M., Zhmoginov, A., and
Chen, L.-C. (2018). Mobilenetv2: Inverted residu-
als and linear bottlenecks. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 4510–4520.
Scharstein, D. and Szeliski, R. (2002). A taxonomy and
evaluation of dense two-frame stereo correspondence
algorithms. International journal of computer vision,
47(1-3):7–42.
Schmid, K., Tomic, T., Ruess, F., Hirschm
¨
uller, H., and
Suppa, M. (2013). Stereo vision based indoor/outdoor
navigation for flying robots. In 2013 IEEE/RSJ In-
ternational Conference on Intelligent Robots and Sys-
tems, pages 3955–3962. IEEE.
Su, H., Jampani, V., Sun, D., Gallo, O., Learned-Miller,
E., and Kautz, J. (2019). Pixel-adaptive convolutional
neural networks. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 11166–11175.
Sun, K., Xiao, B., Liu, D., and Wang, J. (2019). Deep high-
resolution representation learning for human pose es-
timation. In Proceedings of the IEEE conference on
A Lightweight Real-time Stereo Depth Estimation Network with Dynamic Upsampling Modules
709

computer vision and pattern recognition, pages 5693–
5703.
Tonioni, A., Tosi, F., Poggi, M., Mattoccia, S., and Stefano,
L. D. (2019). Real-time self-adaptive deep stereo. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 195–204.
Wang, C., Meng, L., She, S., Mitchell, I. M., Li, T.,
Tung, F., Wan, W., Meng, M. Q.-H., and de Silva,
C. W. (2017). Autonomous mobile robot naviga-
tion in uneven and unstructured indoor environments.
In 2017 IEEE/RSJ International Conference on In-
telligent Robots and Systems (IROS), pages 109–116.
IEEE.
Wang, J., Chen, K., Xu, R., Liu, Z., Loy, C. C., and Lin, D.
(2019a). Carafe: Content-aware reassembly of fea-
tures. In Proceedings of the IEEE International Con-
ference on Computer Vision, pages 3007–3016.
Wang, Y., Lai, Z., Huang, G., Wang, B. H., Van Der Maaten,
L., Campbell, M., and Weinberger, K. Q. (2019b).
Anytime stereo image depth estimation on mobile de-
vices. In 2019 International Conference on Robotics
and Automation (ICRA), pages 5893–5900. IEEE.
Wu, B., Wan, A., Yue, X., Jin, P., Zhao, S., Golmant,
N., Gholaminejad, A., Gonzalez, J., and Keutzer, K.
(2018). Shift: A zero flop, zero parameter alternative
to spatial convolutions. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 9127–9135.
Ye, M., Johns, E., Handa, A., Zhang, L., Pratt, P., and
Yang, G.-Z. (2017). Self-supervised siamese learning
on stereo image pairs for depth estimation in robotic
surgery. arXiv preprint arXiv:1705.08260.
Yin, Z., Darrell, T., and Yu, F. (2019). Hierarchical discrete
distribution decomposition for match density estima-
tion. In Proceedings of the IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 6044–
6053.
Zenati, N. and Zerhouni, N. (2007). Dense stereo match-
ing with application to augmented reality. In 2007
IEEE International Conference on Signal Processing
and Communications, pages 1503–1506. IEEE.
Zhang, X., Zhou, X., Lin, M., and Sun, J. (2018). Shuf-
flenet: An extremely efficient convolutional neural
network for mobile devices. In Proceedings of the
IEEE conference on computer vision and pattern
recognition, pages 6848–6856.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
710
