
Object Tracking using Correction Filter Method with Adaptive
Feature Selection
Xiang Zhang, Yonggang Lu and Jiani Liu
School of Information Science and Engineering, Lanzhou University, Lanzhou, Gansu, China
Keywords: Correlation Filters, Lab Color Space, Confidence Score, Feature Selection.
Abstract: Correlation filter based tracking algorithms have shown favourable performance in recent years. Nonetheless,
the fixed feature selection and potential model drift limit their effectiveness. In this paper, we propose a novel
adaptive feature selection based tracking method which keeps the strong discriminating ability of the
correlation filter. The proposed method can automatically select either the HOG feature or color feature for
tracking based on the confidence scores of the features in each frame. Firstly, the response map of the color
features and the HOG features are extracted respectively using correlation filter. The Lab color space is used
to extract the color features which separate the luminance from the color. Secondly, the confidence region
and the possible location of the target are estimated using the average peak-to-correlation energy. Thirdly,
three criteria are used to select the proper feature for the current frame to perform tracking adaptively. The
experimental results demonstrate that the proposed tracker performs superiorly comparing with several state-
of-the-art algorithms on the OTB benchmark datasets.
1 INTRODUCTION
Visual object tracking is a very active part of the
domain in computer vision, which has many
applications in areas such as surveillance, automation
and robotics (Wu, Lim and Yang, 2013). It is often
used to track the object in a series of frames when a
target is located in one of them. In many visual
tracking tasks, the location of the target is known only
in the first frame, and the estimation of the possible
locations in other frames need to be made. Many
existing algorithms assume that the target location
changes little over time, and determine the target
within a search window centered at the previous object
location, which can be referred to as a motion model
(Wang, Shi, Yeung and Jia, 2015). However, these
algorithms may not be suitable for handling some
complex scenarios, such as illumination variation,
scale variation, occlusion and scale variations
(Marvasti-Zadeh, Seyed Mojtaba and Cheng, 2019).
Visual object tracking has many algorithms to
learn an appearance model of the target using either
generative or discriminative methods. The generating
model (Kwon and Lee, 2011; Liu, Huang, Yang and
Kulikowski, 2011; Sevilla-Lara and Learned-Miller,
2012), such as sparse coding model (Mei, Ling, Wu
and Blasch, 2013), transforms the problem of object
tracking into the problem of sparse approximation,
such as CT tracker (Zhang, Zhang and Yang, 2012).
When the noise level is high, the tracking process is
prone to the drift of the target frame. Most tracking
algorithms use the discriminative methods, and the
main idea is to train an online updated classifier,
which gives the target position in each frame. In this
kind of method, the correlation filter technology
performs the complex convolution operation
efficiently in the frequency domain, which improves
the timeliness of target tracking, so it has attracted
much research interest in the research field. In recent
years, there are many algorithms showed a fusion of
correlation filtering and deep learning. Depth features
use different depth convolution features of
convolution neural networks, which contain more
advanced semantic information. Based on the
correlation filtering algorithm of depth features, the
target location is determined by calculating the
relevant confidence responses of convolution layer
features of different depths (Li, Ma and Wu, 2019).
Although the depth convolution feature has a strong
ability to identify the target, it is hard to understand
the feature transformation in the “black box”, and it
also introduces a high computational complexity such
that the resulting algorithm cannot achieve the real-
480
Zhang, X., Lu, Y. and Liu, J.
Object Tracking using Correction Filter Method with Adaptive Feature Selection.
DOI: 10.5220/0010196604800487
In Proceedings of the 10th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2021), pages 480-487
ISBN: 978-989-758-486-2
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

time performance (Wang, Zhou, Tian, Hong and Li,
2018). So, it is still necessary to study the correlation
filter technology without using the depth convolution
features.
The discriminative model mainly distinguishes
the target from the background by training the
classifier. The convolution theorem shows that the
time-consuming convolution operation can be
converted into an efficient element dot product
operation in the Fourier domain. Based on the
observation, the correlation filtering technology is
introduced into object tracking. Bolme et al. (2010)
applied the correlation filtering algorithm to the target
tracking task for the first time, and proposed the
minimum mean square error (MOSSE) tracking
algorithm which can perform tracking with high
speed. However, the tracking accuracy of the
algorithm is not ideal because of the grayscale
characteristics of the single channel. Henriques et al.
(2012, 2015) added kernel function to the framework
of correlation filtering algorithm, replaced the
grayscale feature of single channel with multi-
channel HOG feature, and proposed kernel
correlation filter (KCF) tracking algorithm. Through
the cyclic matrix, the sampling problem in the
training stage of the correlation filter template is
equivalent to the cyclic shift operation of the Eigen
matrix to complete the intensive sampling of the
training samples. The cyclic sampling effectively
increases the number of samples, and the robustness
of the tracker is further improved. As for the scale
adaptation, Danelljan et al. (2014) put forward the
DSST method on the basis of MOSEE, which uses
two single filters to estimate the position and scale.
While the single feature or multi-feature fusion is
usually used to feature extraction in the most trackers,
Danelljan et al. (2014a, 2014b) used characteristic
Color Names to extend CSK algorithm, which have
obtained good results in the tracking of color video
sequence. In the aspect of multi-feature fusion, HOG
features and Color features are superimposed directly
in a work (Li and Zhu, 2014). The Staple algorithm
(Bertinetto, Valmadre and Golodetz, 2016) fuses
HOG features and color histogram features
(Possegger, Mauthner and Bischof, 2015) with
weighting proportions of 0.7, which effectively
promotes the robustness of tracking, but lacks
pertinence to specific video scenes.
In the process of tracking, if the discrimination
power of one feature is very different from another
feature, using the two features together may result in
low tracking accuracy. To deal with this problem, a
correlation filter tracker based on adaptive feature
selection using the confidence score of response map
is proposed. In this paper, we calculate the confidence
score of the response map using correlation filter for
each feature (HOG feature and color feature in Lab
color space), which can be used to select the features
adaptively. For example, when the object is deformed,
the HOG feature will be affected a lot. The color
feature that is less affected than the HOG features will
be selected for tracking. In the other case when the
color feature of the object is disturbed a lot, the HOG
feature will be selected for tracking. The difference
between this method and other correlation filtering
methods is that the more suitable features are selected
according to the actual situation of each frame, which
increases the flexibility in the feature selection in the
complex scene, and can describe the target more
accurately. The algorithm is tested on the evaluation
criteria of OTB benchmark dataset and 100 video
sequences, and its performance is compared with
many mainstream algorithms.
The architecture of this paper is arranged as
follows: Some related works are briefly reviewed in
Section 2. Then, we introduce the proposed method
based on the confidence score in HOG feature and
color feature in Lab color space in Section 3. The
experiment results are shown in Section 4. Finally,
conclusions are given in Section 5.
2 RELATED WORK
2.1 Correlation Filters
Correlation filtering was first used in signal
processing to describe the correlation between two
signals. Initially, correlation filtering was applied to
visual object tracking in grayscale images by Bolme
et al. (2010). Later, the extension to multiple feature
channels and HOG feature achieved the state of the
art performance (Henriques, Caseiro, Martins, 2012).
In 2014, DSST (Danelljan, Häger and Khan, 2014), a
multi-scale template for Discriminative Scale-Space
Tracking on the basis of MOSSE is used to deal with
the scale change, with two filters to track the position
change and the scale change respectively. The
position filter is used to determine the new target
position, and the scale filter is used for scale
estimation. One deficiency of Correlation Filters is
that they are constrained to learn from all circular
shifts. Several recent works have sought to resolve
this issue, and one of work, called Spatially
Regularized Formulation (SRDCF) (Danelljan,
Hager and Shahbaz, 2015), has demonstrated
excellent tracking results. However, this
improvement is achieved at the cost of real-time
Object Tracking using Correction Filter Method with Adaptive Feature Selection
481

operation. The Staple algorithm (Bertinetto,
Valmadre and Golodetz, 2016) propose a simple
combination of template and histogram scores that are
learnt independently to preserve real-time operation.
The resulting tracker outperforms significantly more
complex state-of-the-arts trackers in several
benchmarks, but there is still the problem of
sacrificing some of the characteristic advantages.
The tracking-by-detection paradigm is used in the
Staple algorithm to calculate the response graph
matrix in the correlation filters as:
,, t-1
F,;
wh wh t
tFTxp
(1)
where x
t
represents the t-th frame image, w and h
represent the position in the frame, T represents an
image transformation function, p represents a
rectangular window which gives a target location in
x
t
, F represents a candidate target, and θ is the model
parameter. Let S
t
represents the set of candidate
targets of the t-th frame, the score F(w, h) of all
candidate target F ∊ S
t
is the response map matrix of
the frame. The parameter θ is calculated by:
t-1 1
=argmin {L ; + R }
Qt
x
(2)
where the L(θ; x
t-1
) represents the loss function,
t
1
,
tii
i
XXxp
represents the sequence of historical
frame tracking results, R(θ) represents a regular term
to prevent overfitting and the λ is regular term
parameter. The loss function is a linear combination
of all sample losses, as shown in (3) and (4):
1
,,,
t
tiii
i
Lx xp
(3)
,, , , ;
qS
x p d p argmax f T x q
(4)
where d(p, q) defines the cost of choosing rectangle q
when the correct rectangle is p. In our paper, we use
the h and β represent the specific model parameters of
HOG feature and color feature respectively which is
solved by two independent ridge regression problems
such as (5) and (6):
2
1
hargmin ;
2
h temp1 t temp1
L
hX h
(5)
2
t2
1
arg min ;
2
temp2 t temp
LX
(6)
2.2 Color Features in Lab Color Space
At present, the input and output of most image
capture devices are based on RGB color space, the
traditional method is to covert the color images into
RGB color space and extract the color features. But
the three channels in RGB color space contain
luminance information, and there is a strong
correlation among them. Therefore, it may not be
possible to obtain the desired effect by using these
directly. Different from the most common RGB color
space, Lab color space does not rely on light or
pigments. It is a color space determined by the
International Lighting Committee (CIE), which can
theoretically describe all colors in nature. In the 3-
channel component of Lab color space, L represents
luminance whose range is [0, 100] and the luminance
increases with the numerical value. The ranges of a
and b channel are both [-128, 127]. In our
experiments, the color features in the Lab color space
is used for the object tracking.
3 THE PROPOSED APPROACH
In this section, we first present the problem
formulation of the adaptive feature selection method
based on the confidence score. Then, we design an
algorithm that builds up a bridge between the known
correlation filter and our problem formulation.
How to judge whether the tracking result is
accurate is a very important problem, because this
determines the update strategy of the model. Many
algorithms, such as KCF, DSST, SRDCF, Staple, do
not judge the reliability of tracking results, and the
results of each frame are updated either immediately
or every N frames. This is unreliable, especially when
the target is occluded, or the tracking has not followed
well, and then update the model, which will only
make the tracker more and more unable to recognize
the target, which is the problem of model drift. In the
correlation filter tracking, ideally, the response map
of each frame is a single peak, and the corresponding
position of the maximum value of the response map
is the tracking result position of the current frame.
The sharper the single spike in the response map
means that the tracking result is more credible;
conversely, the flatter the single spike means the less
credible the tracking result is. However, because the
actual scene is disturbed by complex factors, the
actual response map may be multi-peak, and the
correct target position can be at the highest peak of
the response map. It can also be at the secondary peak
or other peak.
In order to evaluate the effectiveness accurately,
the average peak-to-correlation energy and the
maximum response score F
max
of the response map
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
482

are used together. The F
max
is defined as:
,t-1
=,;
max w h t
FmaxFTxp
(7)
Generally, the value of the highest point F
max
in
response map represents the result of center position,
but, if only this condition is used for feature selection,
the phenomenon of model drift will occur when there
are multiple peaks in the response map. The F
max
does
not reflect the degree of oscillation of the response
map, a new criterion called average peak-to-
correlation energy (APCE) is used, which is:
2
max min
2
,min
,
=
(( ))
wh
wh
FF
APCE
mean F F
(8)
where F
max
, F
min
, F
w,h
represents respectively the
response at the highest, lowest and the w-th row and
h-th column scores of F(w, h). This criterion can
reflect the degree of oscillation of the response map.
When the APCE suddenly changes, the target is
occluded, or the target is lost in this feature which is
unreliable in the frame.
When we begin a new tracking using the
discriminative methods, the goal is to learn a suitable
classifier which can extract the target from the
background in real time. In the first frame, the
location of the target is known. It can directly get the
HOG feature and color feature using the correlation
filter. In this paper, we use the confidence score to
evaluate the reliability of each feature and select the
suitable feature adaptively during the target tracking.
Assume there are t frames X = [X
1
, X
2
, …, X
t
].
Give the location of the target in X
1
, we learn a
discriminative correlation filters in HOG feature and
get the score F
HOG
at each pixel in the response map
with (1). Then the color of RGB image is converted
to the Lab color space. We also learn a correlation
filters in color feature to computed the score F
color
with (1). Because the location of the target in the first
frame is known, the (9) is used to get a standard
confidence score M
HOG
and M
color
in the first frame to
measure the reliability of the following frame. The
threshold is set to evaluate the reliability of the next
frame, which is:
30%*
30%*
HOG HOG
color color
threshold M
threshold M
(9)
If the score of the next frame is greater than the
threshold, the frame is considered to be a valid frame
and added to the benchmark queue, otherwise the
frame is considered invalid, which will cause the
model drift and is discarded. The benchmark queue
stores the scores of three valid frames and takes the
average score as the benchmark:
n
base
t1
=
t
A
PCE
S
n
(10)
In this paper, we use three indicators to select the
optimal features adaptively. First, the score of the
response map APEC represents the confidence degree
of the current frame. We put the two kinds of scores
under the same standard and compare them. Because
the M
HOG
and M
color
is the standard score, we set a ratio
to transform the APCE
color
to APCE
HOG
, which is:
**
tt
t
color HOG color HOG
color
APCE M M APCE
ratio
M
(11)
If the ratio>0, the color feature is better than the
HOG feature. Second, a rate of changing the score is
set to measure the confidence degree, which is:
t
=
t
base
base
A
PCE S
change_rate
S
(12)
When the rate of the HOG feature is greater than
the color feature, we choose the stable feature of color
feature in this case. Otherwise, the other one will be
selected. Finally, we calculate the position offset of
the maximum value of the response map F
max
in the
current frame from the previous frame, which is:
22
t
tt-1 1
x-x
tt
yy
(13)
Because a normal tracking changes smoothly
between neighboring frames, if there is a sudden
change in the offset of the maximum value, the model
drift is considered to have occurred. We choose the
smaller distance of each feature by comparing it
separately. A confidence score is designed to measure
the three criteria to select the suitable feature, which is:
t
color
_
=,
=_ _ ,
t
t
tt
color HOG
t
HOG
C Score Sign Sign Sign
ratio
change rate change rate
,
(14)
where the Sign(x) is the symbolic function. In the
definition of the C_Score, if the score is positive, the
Object Tracking using Correction Filter Method with Adaptive Feature Selection
483
color feature is better than the HOG feature in at least
two criteria, we select the color feature in the current
frame for tracking and model update. Otherwise, the
HOG feature is selected. An overview of the proposed
method is summarized in Algorithm 1.
Algorithm 1: The proposed tracking algorithm.
Input: Frames {It}, initial target location p
1
Output: Target locations of each frame {p
t
, t ≠1}
1: REPEAT
2: Crop an image region from the las
t
location p
t−1
and extract its response map in
HOG feature.
3: Convert the RGB image to the Lab colo
r
space and extract the response map.
4: Calculate the F
max
and the APCE fro
m
the response map via (7) and (8).
5: Calculate three adaptively selected
conditions via (11), (12) and (13).
6: IF the C_Score via (14) is positive
THEN
7: Select the response map of colo
r
feature to update the model
8: ELSE
9: Select the response map of HOG
feature to update the model
10: END IF
11: UNTIL end of video sequence.
4 EXPERIMENTAL RESULTS
AND ANALYSIS
In this section, the proposed method is verified on two
benchmark datasets, OTB13 (Wu, Lim and Yang,
2013) and OTB15 (Wu, Lim and Yang, 2015), and
compared with several recent algorithms such as
Staple, LMCF (Wang, Liu and Huang, 2017), SRDCF,
DSST (Danelljan, Hager and Khan, 2017) and KCF.
It is implemented in MATLAB with an Intel Core i7
3.60GHz CPU and 8GB of RAM.
We follow the evaluation standard provided by the
benchmark OTB15 which includes 100 video
sequences with various targets and backgrounds. In
OTB15, four indices are used to evaluate all the
compared algorithms with one-pass evaluation (OPE)
such as bounding box overlap, center location error,
distance precision and overlap precision. We evaluate
the trackers according to the result with an error
threshold of 20 pixels for the precision plots. For the
success plots, the trackers are evaluated by the AUC
scores.
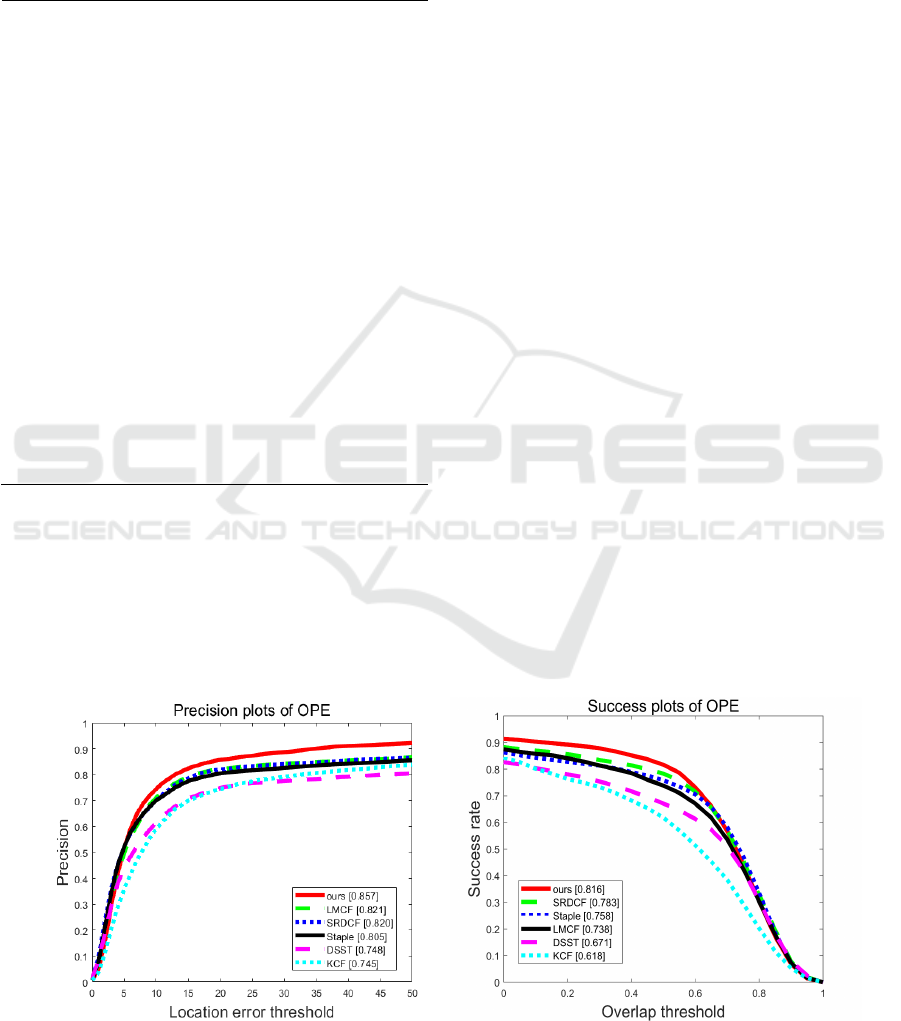
Figure 1 shows the performance of our method
with the other correlation filters on OTB-15. The
proposed performs significantly better than the other
methods. In the precision plot, our tracker performs 6%
better than the Staple algorithm. The tracker also
shows 7% better than the Staple in the success plot.
For a more specific analysis, the performance of our
tracker approach can be affected by several
challenges as shown in Figure 2. It shows the
performance of tracking method for various
challenging attributes provided in the benchmark
OTB-15 such as Illumination Variation (IV), Scale
Variation (SV), Occlusion (OCC), Deformation
(DEF), Motion Blur (MB), Fast Motion (FM), In-
Plane-Rotation (IPR), Out-of-Plane-Rotation (OPR),
Out-of-View (OV), Background Clutters (BC), Low
Resolution (LR). Our method is effective in BC, DEF,
IV, OPR and OCC compared to the existing
approaches and more robust than the compared
trackers for deformable object. Because the color
feature
of our algorithm is in Lab space, it can better
Figure 1: The precision plots(left) and success plots(right) of OPE on OTB-15. The numbers in the legend shows the precision
scores and AUC scores for each tracker.
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
484
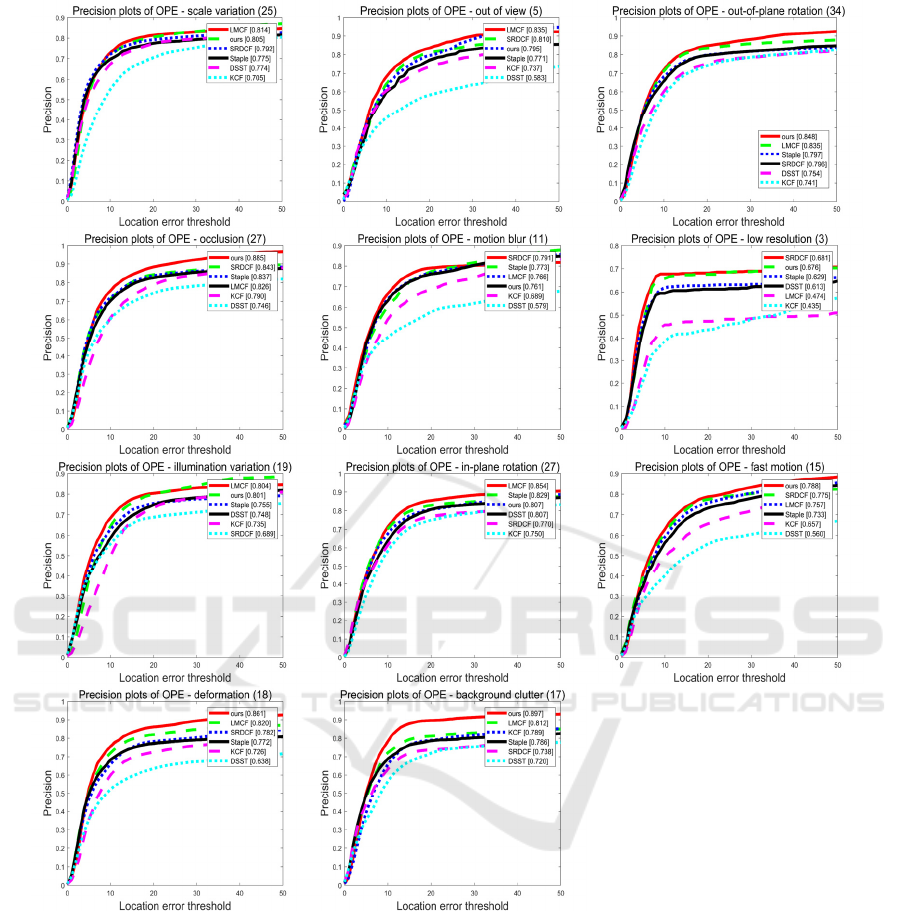
Figure 2: The success plots for 11 challenging attributes including background clutter, illumination variation, occlusion,
deformation, out-of-plane rotation, out-of-view, scale variation, in-plane rotation, motion blur, fast motion, low resolution.
The proposed tracker performs best or second best in almost all the attributes.
recognize the change of the different frame and
enhance the tracking effect than other correlation
filtering algorithms in RGB color space in IV. In
addition, if the color feature does not change much,
the HOG feature can enhance the tracking effect in
the DEF. It can also be seen from Figure 2 that our
tracker achieves better performance than the other
trackers when the object suffers from fast motion and
background clutters.
Figure 3 shows the results of different tracking
algorithms. It can be seen that the proposed approach
can handle different situations well. There are four
types of video tracking results shown in Figure 3. The
first row is the skiing sequence which represents a
deformation scenario. In the video sequence the
athlete is in a state of high-speed and deformation.
The color feature of the player changes obviously in
each frame and the HOG feature is not useful. The
proposed method automatically selects the color
features
for tracking. Compared with other trackers,
Object Tracking using Correction Filter Method with Adaptive Feature Selection
485

Figure 3: Several representative frames of different tracking algorithms. Our tracker exhibits robustness in challenging
scenarios like deformation (row 1), fast motion (row 2), background clutter (row 3), occlusion (row 4). These sequences come
from the OTB15 benchmark (Skiing, Deer, Soccer and Basketball). The red rectangle indicates the bounding box obtained
by the proposed tracker.
it does not fuse the color feature with the HOG feature
and improves the tracking effect. The second row is
the deer sequence which represents the fast motion
scenario. In the video sequence a deer runs in a high
speed. The color feature is also automatically selected
by the proposed method. The third row shows the
results of the soccer sequence which represents a
background clutters scenario. The target is the player
dressed in red in the video sequence. From 70th frame
to 113th frame, the background color also becomes
red, so the APEC score of the color feature is lower
than that of the HOG feature. The proposed tracker
only uses the HOG feature for tracking and produces
more accurate tracking results, while the other
trackers use both the color feature and HOG feature
and the tracking performance is deteriorated,
resulting in the loss of tracking targets. The fourth
row is the basketball sequence which represents an
occlusion scenario. The target is partially or fully
occluded in the video sequence. When the player is
occluded, the color feature is affected and the HOG
feature is automatically selected by the propose
method to deal with this situation.
These results demonstrate that the proposed
tracker is able to handle various categories of objects
by selecting the feature adaptively.
5 CONCLUSIONS
In this paper, to improve the precision and success in
target tracking, a method is proposed to select a
feature adaptively based on a confidence score. The
confidence score can be used to select the most
suitable feature for tracking at each frame adaptively.
The adaptive feature selection at the frame level is
shown to be effective for improving the robustness in
tracking. One disadvantage of the method is the
introduction of the additional computation of the
confidence score, although the real time tracking can
still be performed. We will continue to work on
improving the speed of the proposed method in the
future work.
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
486

ACKNOWLEDGMENT
This work is supported by the National Key R&D
Program of China (Grants No. 2017YFE0111900,
2018YFB1003205).
REFERENCES
Wu, Y. , Lim, J. , & Yang, M. H. . (2013). Online Object
Tracking: A Benchmark. Computer Vision & Pattern
Recognition. IEEE.
Wang, N. , Shi, J. , Yeung, D. Y. , & Jia, J. . (2015).
Understanding and diagnosing visual tracking systems.
Marvasti-Zadeh, Seyed Mojtaba & Cheng, Li & Ghanei-
Yakhdan, Hossein & Kasaei, Shohreh. (2019). Deep
Learning for Visual Tracking: A Comprehensive Survey.
Sevilla-Lara, L. , & Learned-Miller, E. . (2012).
Distribution fields for tracking. Computer Vision &
Pattern Recognition. IEEE.
Liu, B. , Huang, J. , Yang, L. , & Kulikowski, C. A. . (2011).
Robust tracking using local sparse appearance model
and K-selection. IEEE Conference on Computer Vision
& Pattern Recognition. IEEE.
Kwon, J. , & Lee, K. M. . (2011). Tracking by Sampling
Trackers. International Conference on Computer Vision.
IEEE.
Mei, X. , Ling, H. , Wu, Y. , & Blasch, E. P. . (2013).
Efficient minimum error bounded particle resampling
l1 tracker with occlusion detection. IEEE Transactions
on Image Processing, 22(7), 2661-2675.
Zhang, K. , Zhang, L. , & Yang, M. H. . (2012). Real-Time
Compressive Tracking. European Conference on
Computer Vision. Springer, Berlin, Heidelberg.
Li, X. , Ma, C. , Wu, B. , He, Z. , & Yang, M. H. . (2019).
Target-Aware Deep Tracking. 2019 IEEE/CVF
Conference on Computer Vision and Pattern
Recognition (CVPR). IEEE.
Wang, N. , Zhou, W. , Tian, Q. , Hong, R. , & Li, H. . (2018).
Multi-Cue Correlation Filters for Robust Visual
Tracking. 2018 IEEE/CVF Conference on Computer
Vision and Pattern Recognition (CVPR). IEEE.
Bolme, D. S. , Beveridge, J. R. , Draper, B. A. , & Lui, Y.
M. . (2010). Visual object tracking using adaptive
correlation filters. The Twenty-Third IEEE Conference
on Computer Vision and Pattern Recognition, CVPR
2010, San Francisco, CA, USA, 13-18 June 2010. IEEE.
Henriques, J. F. , Caseiro, R. , Martins, P. , & Batista, J. .
(2012). Exploiting the circulant structure of tracking-
by-detection with kernels.
Henriques, J. F. , Caseiro, R. , Martins, P. , & Batista, J. .
(2015). High-speed tracking with kernelized correlation
filters. IEEE Transactions on Pattern Analysis &
Machine Intelligence, 37(3), 583-596.
Danelljan, M. , Gustav Häger, Khan, F. S. , & Felsberg, M. .
(2014). Accurate Scale Estimation for Robust Visual
Tracking. British Machine Vision Conference.
Danelljan, M. , Khan, F. S. , Felsberg, M. , & Weijer, J. V.
D. . (2014). Adaptive Color Attributes for Real-Time
Visual Tracking. IEEE Conference on Computer Vision
& Pattern Recognition. IEEE.
Cai, Z. , Wen, L. , Lei, Z. , Vasconcelos, N. , & Li, S. Z. .
(2014). Robust deformable and occluded object
tracking with dynamic graph. IEEE Transactions on
Image Processing, 23(12).
Li, Y. , & Zhu, J. . (2014). A scale adaptive kernel
correlation filter tracker with feature integration.
Bertinetto, L. , Valmadre, J. , Golodetz, S. , Miksik, O. , &
Torr, P. H. S. . (2016). Staple: Complementary Learners
for Real-Time Tracking. Computer Vision & Pattern
Recognition. IEEE.
Possegger, H. , Mauthner, T. , & Bischof, H. . (2015). In
defense of color-based model-free tracking. Computer
Vision & Pattern Recognition. IEEE.
Danelljan, M. , Hger, G. , Khan, F. S. , & Felsberg, M. .
(2016). Learning spatially regularized correlation filters
for visual tracking.
Wang, M. , Liu, Y. , & Huang, Z. . (2017). Large margin
object tracking with circulant feature maps.
Wu, Y. , Lim, J. , & Yang, M. H. . (2015). Object tracking
benchmark. IEEE Transactions on Pattern Analysis &
Machine Intelligence, 37(9), 1834-1848.
Babenko, B. , Yang, M. H. , & Belongie, S. . (2011). Robust
object tracking with online multiple instance learning.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 33(8), 1619-1632.
Danelljan, M. , Hager, G. , Khan, F. S. , & Felsberg, M. .
(2016). Discriminative scale space tracking. IEEE
Transactions on Pattern Analysis and Machine
Intelligence, PP(99), 1-1.
Object Tracking using Correction Filter Method with Adaptive Feature Selection
487
