
LSTM Architectures for Facade Structure Completion
Simon Hensel
1
, Steffen Goebbels
1
and Martin Kada
2
1
Institute for Pattern Recognition, Niederrhein University of Applied Sciences, Reinarzstrasse 49, Krefeld, Germany
2
Institute of Geodesy and Geoinformation Science, Technical University of Berlin, Kaiserin-Augusta-Allee 104-106, Berlin,
Germany
Keywords:
Deep Learning, LSTM, Facade Reconstruction, Structure Completion.
Abstract:
3D city models are often generated from oblique aerial images and photogrammetric point clouds. In con-
trast to roof surfaces, facades can not directly be reconstructed in a similar high level of quality from this
data. Distortions of perspective might appear in images, due to the camera angle. Occlusions and shadow-
ing occur as well. Objects, such as windows and doors, will have to be detected on such data if facades are
to be reconstructed. Although one can use inpainting techniques to cover occluded areas, detection results
are often incomplete and noisy. Formal grammars can then be used to align and add objects. However, it
is difficult to find suitable rules for all types of buildings. We propose a post-processing approach based on
neural networks to improve facade layouts. To this end, we applied existing Recurrent Neural Network archi-
tectures like Multi-Dimensional Long Short-term Memory Network and Quasi Recurrent Neural Network in
a new context. We also propose a novel architecture, the Rotated Multi-Dimensional Long Short Term Mem-
ory. In order to deal with two-dimensional neighborhoods this architecture combines four two-dimensional
Multi-Dimensional Long Short-term Memory Networks on rotated images. We could improve the quality of
detection results on the Graz50 data set.
1 INTRODUCTION
In most cases, facades cannot be reconstructed in the
same high quality as roofs due to their limited visi-
bility on aerial photographs. Camera angles can lead
to perspective distortions. In addition, occlusions and
shadows can be caused by various objects. In order
to be able to reconstruct facades, objects such as win-
dows and doors have to be recognized. Neural net-
works for object detection and instance segmentation,
see Section 2, search for individual object instances,
but do not consider overall layout patterns. Thus, re-
lationships between windows are not considered.
One can apply inpainting techniques on input im-
ages or use model knowledge to suggest missing ob-
jects. Inpainting is a standard computer vision tech-
nique to extrapolate visual information to fill or re-
place damaged, fuzzy or missing areas in images. As
shown in (Bertalmio et al., 2000), inpainting is effec-
tive in removing texts or other objects present in im-
ages. Since inpainting is performed on images, it has
to be used as a processing step prior to segmentation
or detection of facade objects. Therefore, it does not
benefit from knowledge gathered by object detection.
Techniques based on model knowledge can bene-
fit from detection results and can be applied in a post-
processing step. For building reconstruction, split
grammars are described in (Wonka et al., 2003). Such
grammars are a collection of rules by which object
placement and orientation can be described. They al-
low adding missing facade objects and even to gen-
erate facades from scratch procedurally. However,
grammar rules have to fit for a given building style.
Unique facade styles might require individual rules
that have to be provided manually. In a situation in
which it is difficult to define rules, machine learning
is well suited.
Instead of defining grammars, we propose to ap-
ply Recurrent Neural Networks (RNNs) with Long
Short Term Memory (LSTM). They are typically used
for time-dependent, one-dimensional input data. A
main application is speech recognition. Our aim is
to restore missing facade objects based on available,
incomplete detection results. These results are rep-
resented by bounding boxes. By extending edges of
these bounding boxes to lines, we obtain an irregu-
lar rectangular lattice (IRL). This is a collection of
horizontal and vertical lines where the distances be-
tween the lines can vary. We merge parallel lines
into a single one if lines are within a threshold dis-
Hensel, S., Goebbels, S. and Kada, M.
LSTM Architectures for Facade Structure Completion.
DOI: 10.5220/0010194400150024
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 1: GRAPP, pages
15-24
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
15
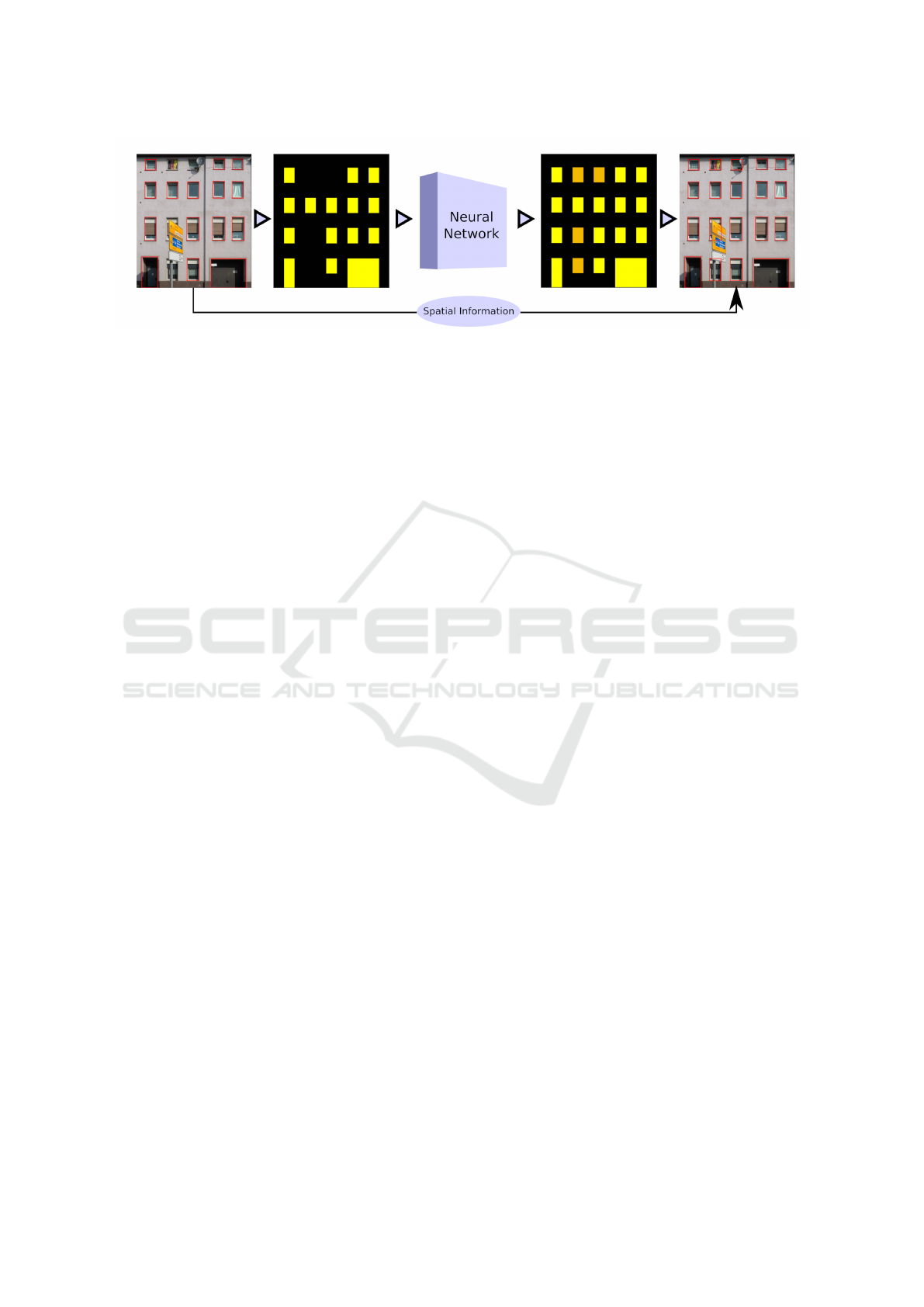
Figure 1: Workflow for facade structure completion: Due to a signpost, a satellite dish and a flag, four windows could not be
detected. They were added with a LSTM.
tance that corresponds with the average image reso-
lution, see Section 3.1. Areas that are bounded but
not intersected by the lines are called cells. In ac-
cordance with given detection results, cells are ini-
tially labeled either as background or as belonging
to a facade object class (windows, doors). Now the
task is to correct labels of cells that belong to miss-
ing objects. The proposed workflow is shown in Fig-
ure 1. To this end, we compare the proposed Rotated
Multi-Dimensional LSTM (RMD LSTM, see Section
3) with Quasi Recurrent Neural Network (QRNN),
see (Bradbury et al., 2016), Section 4.
2 RELATED WORK
For the 3D reconstruction of facades their compo-
nents have to be recognized. If images of the fa-
cades are available (e.g. from oblique aerial images),
this can be done using neural networks. During the
last decade, Convolutional Neural Networks (CNNs)
have become a standard tool for image-based object
detection and segmentation. For image segmentation
on low-performance hardware YOLO (Bochkovskiy
et al., 2020) is widely used. By reducing the number
of weights through adding connections between lay-
ers and outputs, ResNET (He et al., 2016) was a mile-
stone in deep learning. In the field of object detection
is Mask R-CNN (He et al., 2017) an enhancement of
a regional convolutional network with added segmen-
tation capabilities. RetinaNet (Lin et al., 2017) in-
troduced the concept of focal loss to distinguish be-
tween fore- and background. These image segmenta-
tion or object detection networks can be used within
a 3D building reconstruction framework. In this re-
gard, CityGML is the standard open data model for
semantic 3D city models, see (Gr
¨
oger et al., 2007).
We use bounding boxes of detected objects to re-
construct facades. To this end, two problems have
to be solved: Boxes might not be aligned properly
and boxes of occluded objects might be missing. The
alignment problem can be seen as a combinatorial op-
timization problem, see (Hensel et al., 2019) and (Hu
et al., 2020). In this paper, we deal with adding miss-
ing boxes. Image inpainting techniques as well as the
application of formal grammars can be applied to es-
timating such missing information. The given paper
discusses a third deep-learning-based method that can
be applied to facade layouts.
Two inpainting methods that were used early are
diffusion-based or example-based, cf. (Guillemot and
Le Meur, 2014). Diffusion-based inpainting with
smoothing priors is capable of repairing sparsely dis-
tributed small holes, but fails in the event of major
disturbances. Example-based inpainting is able to ex-
tend textures into larger areas that need to be filled.
However, it does not preserve the edges, which are
an important feature of facade objects. Both methods
try to keep simple textures instead of detecting more
complex structures. Therefore, they are not suitable
for facades. This issue is addressed in (Dai et al.,
2013). The authors use a Random Forest-based ap-
proach to obtain a semantic segmentation. Edges of
segment borders are used to define an IRL. Corre-
sponding cells are initially labeled based on semantic
segmentation similar to our approach that is based on
bounding boxes, see Section 3.1. The IRL is inter-
preted as an undirected graph to define a graph label-
ing problem. The labeling is optimized by minimiz-
ing an energy function. This function measures the
image and structural consistency. In contrast to the
measurement of structural consistency, facade objects
are clustered in our approach.
The article (Huang et al., 2014) deals with another
inpainting algorithm that is applied in connection with
the reconstruction of facade structures. This approach
is based on line segments of edges. Corresponding
lines might intersect in vanishing points. The algo-
rithm detects all vanishing points and classifies line
segments according to their vanishing point. Areas
that are covered by line segments belonging to two
vanishing points might be part of a 3D plane. The
GRAPP 2021 - 16th International Conference on Computer Graphics Theory and Applications
16

knowledge of planes is then used to continue textures.
The method is implemented as a random search algo-
rithm supported by various cost functions based on
appearance, guidance, orthogonal direction and prox-
imity.
The introduction of Generative Adversarial Net-
works (GANs), see (Goodfellow et al., 2014) is a
milestone in inpainting techniques, see for example
the application of Wasserstein GAN (Arjovsky et al.,
2017) in (Yu et al., 2018). A more recent example of
image inpainting with GANs is EdgeConnect (Nazeri
et al., 2019). Here, edge images serve as GAN inputs.
Typically, it is necessary to specify the area that
is to be filled by an inpainting algorithm. This ad-
ditional complexity does not occur with model-based
techniques. GANs tend to be unstable and are there-
fore harder to train, see (Arjovsky and Bottou, 2017).
That is one reason why we use more robust LSTM
architectures.
In contrast to data-based approaches like inpaint-
ing, model based methods consider typical facade lay-
outs that can be either learned (as proposed here) or
explicitly given in terms of rules by formal gram-
mars. The first used formal grammars for facade un-
derstanding and reconstruction were split grammars
(Wonka et al., 2003). In the article (Teboul et al.,
2011) shape grammars to generate probabilities for
facade object classes are described. The initial proba-
bility map for terminal symbols is provided by a dis-
criminative model. To further optimize labels, the
model is used in a Markov Decision Process. Rein-
forced learning is applied to optimize the model. A
system consisting of immediate and cumulative re-
wards is used to obtain facade segmentations which
are close to reality. A greedy-type algorithm com-
putes final results.
Also, formal grammars are not limited to be used
on 2D images, see (Dehbi et al., 2016). Utilizing
point cloud data, values along horizontal and verti-
cal lines are cumulated with a Kernel Density Estima-
tion. Lower values correspond with the occurrence
of doors and windows. On those values, weighted at-
tribute context-free grammars are applied to refine a
facade model. In a weighted attributed context-free
grammar, attributes define semantic rules and these
rules are weighted with probabilities.
Since we do not want to define grammar rules
manually, we apply deep learning. The essence of
RNN and LSTM architectures is to provide a neu-
ral network with memory and previous predictions,
cf. (Sherstinsky, 2020). These networks are mostly
used for recognition of speech, text or generally one-
dimensional data, cf. (Salehinejad et al., 2017) and
(Mtibaa et al., 2020). The ability to process one-
dimensional data with memory gives them high capa-
bilities over one-dimensional CNNs, see (Zhang and
Wang, 2016).
Extensions of LSTMs are Multi-Dimensional
LSTM (Graves et al., 2007), on which the new Ro-
tated Multi-Dimensional LSTM is built upon, Quasi
RNN (Bradbury et al., 2016) and Grid LSTM (Kalch-
brenner et al., 2015). To our knowledge, LSTMs have
not been applied to the problem of facade reconstruc-
tion so far. Due to memory connections and a two-
dimensional input serialized to one dimension, RNN
and LSTM architectures have a high demand for hard-
ware resources. Especially for Grid LSTM this causes
problems. In Section 3.1 we explain how we reduce
the size of data so that it can be processed by an RNN
or LSTM.
3 RECURRENT NEURAL
NETWORKS FOR PATTERN
COMPLETION
We consider the ability of RNNs to utilize predictions
from the past (processed spatial regions) to learn fa-
cade layouts. Our contribution consists of
• a workflow for refining facade object detection
• the Rotated Multi-Dimensional LSTM for facade
completion and object recommendation.
• a comparison of outcomes of Quasi RNN, RMD
LSTM (and MD LSTM).
3.1 Data Preparation
With the CMP facade data set (Tyle
ˇ
cek and
ˇ
S
´
ara,
2013) and the Graz50 data set (Riemenschneider
et al., 2012) we used two different data sets to train
and evaluate the RNN architectures. The CMP data
set provides 606 facade images with ground truth in-
formation for object detection and segmentation. The
Graz50 data set consists of 50 images with corre-
sponding annotations for segmentation. The larger
CMP data set was used for training. Images of one
data set belong to a different facade style than im-
ages of the second set do. Thus, we avoided effects
of overfitting, and we were able to demonstrate the
ability to complete facade layouts of arbitrary facade
types. Since we wanted to improve already detected
facade layouts, we did not work with the RGB facade
images of both data sets but we only considered cor-
responding ground truth information. We focused on
windows and doors and ignored other classes of fa-
cade objects. Either ground truth of these data sets or
LSTM Architectures for Facade Structure Completion
17
(a) (b)
(c) (d)
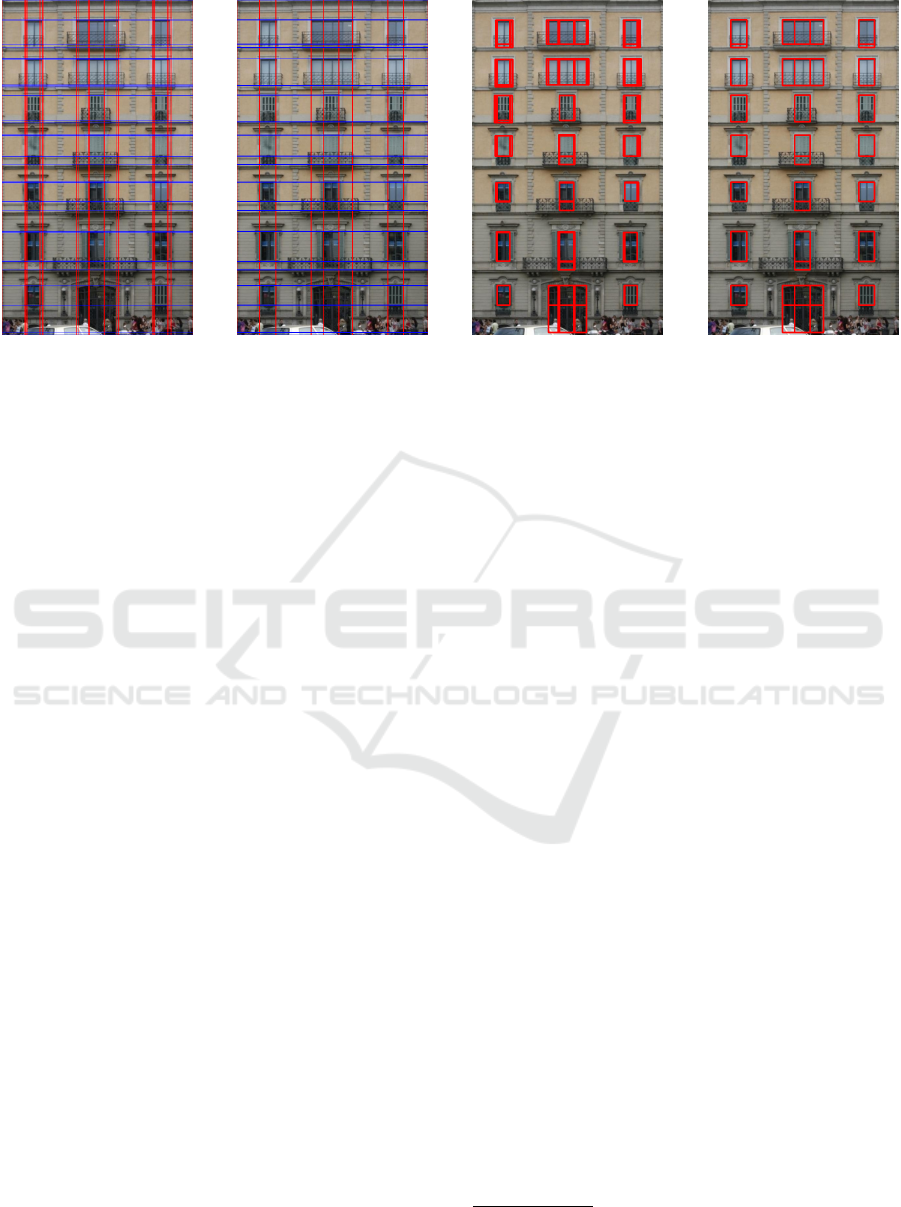
Figure 2: Images (a) and (b) show an IRL representation of the facade from the CMP data set. Images (c) and (d) show
corresponding bounding boxes. IRL in (b) was generated by merging lines of the IRL in (a).
detection results define position and size of windows
and doors. This information can be interpreted as an
IRL, see Section 1. Then each cell of the IRL is as-
signed to an entry of a matrix M. For example, the
facade in Figure 1 is represented by
M =
0 0 0 0 0 0 0 0 0 0 0
0 1 0 0 0 0 0 1 0 1 0
0 0 0 0 0 0 0 0 0 0 0
0 1 0 1 0 1 0 1 0 1 0
0 0 0 0 0 0 0 0 0 0 0
0 1 0 0 0 1 0 1 0 1 0
0 0 0 0 0 0 0 0 0 0 0
0 1 0 0 0 1 0 1 1 1 0
0 1 0 0 0 0 0 1 1 1 0
. (1)
However, these derived IRLs result in matrices that
are by far too large to be used directly as input of
RNNs. Therefore, we further simplify IRLs by merg-
ing grid lines. We iterate through all lines, determine
for each line all other lines of the same orientation
within a distance of at most 8 pixels and then replace
them with a mean line. Figure 2 (b) shows an IRL and
the effect of merging close lines in comparison with
Figure 2 (a). Figures 2 (c) and 2 (d) represent the
corresponding bounding box representation. Merging
close lines improves simplicity and size of generated
matrices, see Figure 3, without changing the facade
layout significantly. Note that the IRLs Figure 2 fit
with matrices in Figure 3. Figure 3 also shows that
merging can lead to patterns and symmetry. Using the
simplified IRL we generate a two-dimensional matrix
consisting of zeroes (cell belongs to background) and
ones (cell covered by a facade object). Spatial infor-
mation for restoring bounding boxes, i.e. the IRL, is
stored separately. The combination of matrix and IRL
allows us to reconstruct bounding boxes. Depending
on the complexity of the facade we are able to re-
duce a label image to a matrix with a size between
10 × 10 and 100 × 100 entries. We restrict ourselves
to network inputs of size 25 × 25. To fit matrices into
this format, we experimented with scaling. To ob-
tain good results however, we only worked with fa-
cades that lead to matrices which did not exceed in-
put size. This are 359 facades of CMP and 46 facades
of Graz50 data. We applied zero padding. Whereas
MD LSTM and RMD LSTM allow 2D matrix input,
matrices have to be serialized for QRNN.
3.2 Workflow
Merging lines of the IRL leads to aligned bound-
ing boxes. However, both in an additional pre- and
post-processing step, one can apply the algorithms in
(Hensel et al., 2019) or (Hu et al., 2020) to further im-
prove alignments. Between these steps, facade struc-
tures have to be completed by adding missing facade
objects. For building , training and testing of neural
networks we use Tensorflow (Abadi et al., 2015) and
provide source code
1
. To this end, we propose the
following workflow.
Training. At first, we process the object detec-
tions into a 2D matrix, like explained in Section 3.1.
Randomly generated data showed great potential in
other work, see (Tobin et al., 2017), and also should
minimize effects of overfitting. Hence, we select ma-
trices randomly to generate training batches on the fly.
Then we randomly select a matrix entry that belongs
to a facade object. Using flood filling, we reset all
entries of the chosen object to represent background.
1
Source code available to the general public at https://
github.com/SimonHensel/LSTM-Facade-Completion
GRAPP 2021 - 16th International Conference on Computer Graphics Theory and Applications
18
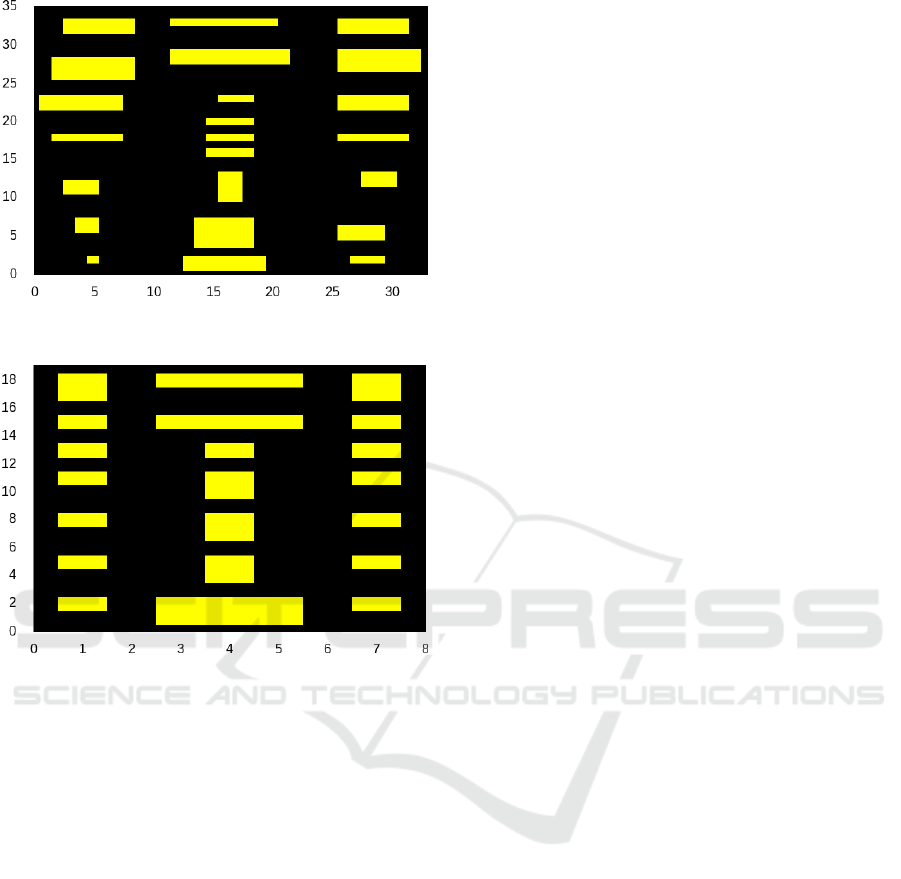
(a) Matrix representation of IRL before merging of lines
within threshold distance.
(b) Resulting Matrix with merged horizontal and vertical
lines.
Figure 3: Impact of merging horizontal and vertical grid
lines in the IRL of Figure 2(a). Note that axes are scaled
differently, such that the resulting matrix of the simplified
IRL is much smaller.
We repeat this step until 20% of objects are re-labeled.
With this we trained networks using a batch size of 16
and 20,000 batches. We trained on a total of 320,000
randomly generated matrices. Networks are trained
so that missing facade objects are added to the input.
Therefore, the ground truth is the original matrix. To
further improve results, we define clusters such that a
number of the cluster serves as a refined label. Differ-
ent classes (windows, doors) belong to different clus-
ters. Objects of one class belong to the same cluster if
they are positioned in exactly the same rows and if all
objects possess the same number of columns. As seen
in Figure 5(d)-(f), this results in a horizontal cluster-
ing. We enumerate clusters and use the numbers as
new object labels, i.e., as new matrix entries. Clus-
tering is only applied to input data, ground truth and
network output consist of probability values. To avoid
overfitting, we add noise to background entries of the
input. For comparison we tested RMD LSTM against
MD LSTM and QRNN. MD LSTM and RMD LSTM
take about a full day to finish training on an NVIDIA
P6000 GPU. The QRNN, on the other hand, is much
faster, the training was finished after 3 hours. All net-
works were trained with the same number of iterations
using the Adam optimizer and a Mean Squared Error
loss function. After training we tested on matrices
derived from the Graz50 data set (Riemenschneider
et al., 2012).
Multi-Dimensional LSTM. MD LSTM is a RNN
architecture that allows for multi-dimensional input
by using separate memory connections for each di-
mension. In the two-dimensional case for example, a
cell (x, y) is connected with (x − 1, y) and (x, y − 1).
Thus, a directed spatial context is established. The
proposed Rotational MD LSTM is based on this net-
work.
Quasi Recurrent Neural Network. The QRNN
is a CNN that emulates memory connections with an
embedded pooling layer. For inputs x
1
to x
T
three vec-
tors at timestep t are the outputs of the convolutional
layers. A candidate vector z
t
, a forget vector f
t
and an
output vector o
t
are calculated as follows
z
t
= tanh(conv
W
z
(x
t
, . . . , x
t−k+1
))
f
t
= σ(conv
W
f
(x
t
, . . . , x
t−k+1
))
o
t
= σ(conv
W
o
(x
t
, . . . , x
t−k+1
)) .
The convolution conv uses a filter size of k and the
weight vectors are represented by W
z
, W
f
and W
o
. The
immediate outputs z
t
, f
t
and o
t
are then used to calcu-
late the hidden states c
t
in the pooling layers. In this
step
c
t
= f
t
c
t−1
+ (1 − f
t
) z
t
h
t
= o
t
c
t
,
where h
t
is the network output for timestep t. c
0
and
h
0
are initialized with 0. Operator denotes element-
wise multiplication. An advantage of the QRNN is
that input can be processed in parallel, while regu-
lar RNNs compute intermediate outputs sequentially.
Network operations including pooling are cheap to
perform such that the network is fast and memory ef-
ficient. A sequential processing only takes place in
the pooling layer.
Rotated Multi-Dimensional LSTM. RNNs are
mainly used for time-dependent problems where in-
formation from the past have to be taken into ac-
count. To solve spatial problems, often data of a
complete spatial neighborhood is relevant. However,
when MD LSTM for two-dimensional input deals
with cell (x, y), information of ”future” cells (x+1, y)
and (x, y +1) needs to be considered but has not been
computed. Especially when applying MD LSTM to
LSTM Architectures for Facade Structure Completion
19
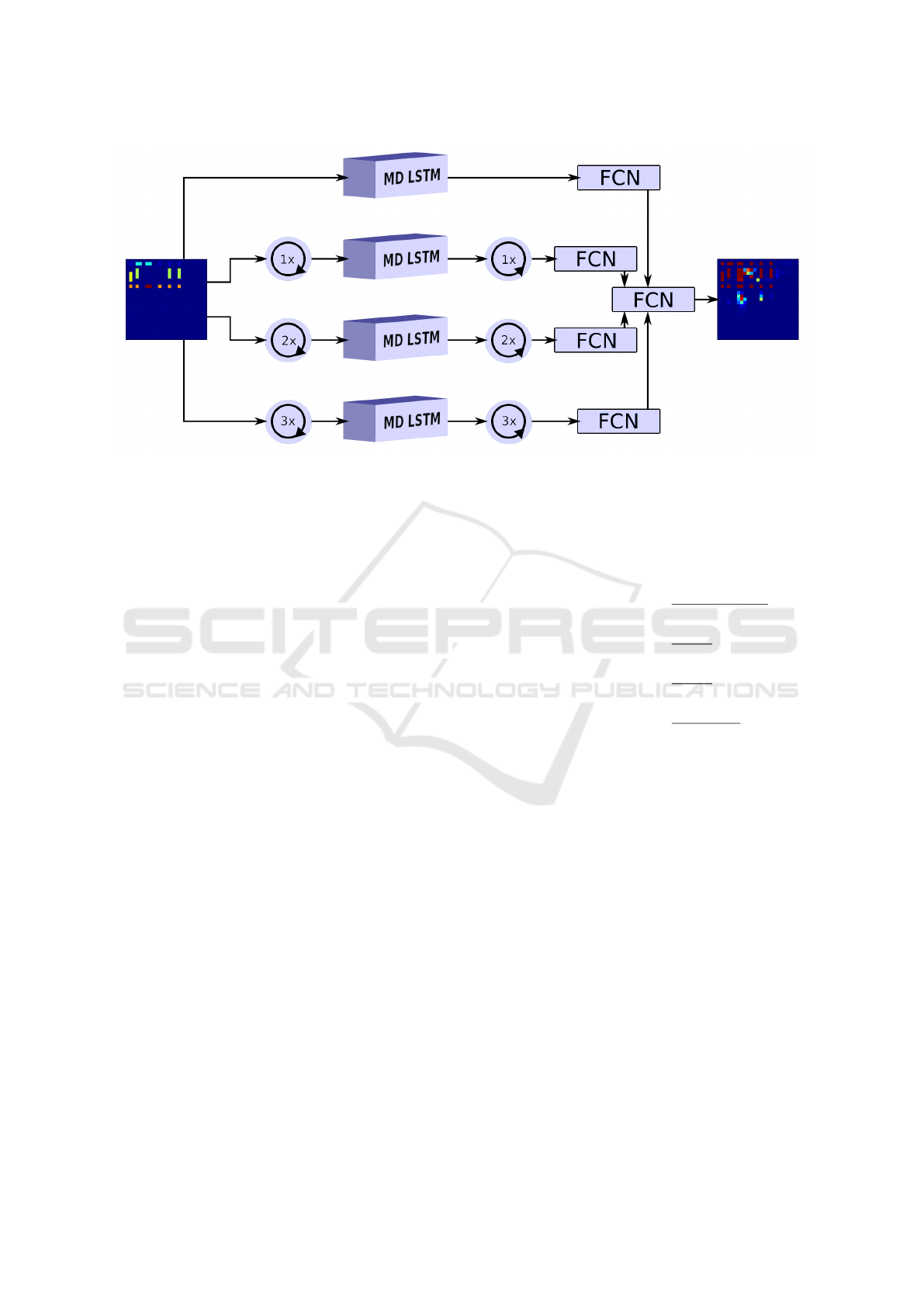
Figure 4: Rotated Multi-Dimensional LSTM.
facade completion, missing facade objects in the up-
per left image region can’t be added. To overcome
this problem, we combine four MD LSTMs, work-
ing on facade inputs that are rotated by k × 90
◦
, k ∈
{0, 1, 2, 3}. Thus, each single MD LSTM starts in a
different corner of the facade. The outputs of the MD
LSTMs are rotated back to the original facade orienta-
tion. These results are combined with fully connected
layers and sigmoid activation function, see Figure 4.
We also experimented with maximum pooling instead
of fully connected layers, which only resulted in a
small increase by an absolute values of 0.05 for IoU.
Reconstruction. To use the neural network in re-
construction tasks, the detected objects have to be pre-
pared as described in Section 3.1. The resulting ma-
trix is then processed by the chosen neural network
to obtain object recommendations, see Figure 1. Rec-
ommended objects are equipped with bounding boxes
by considering cell coordinates of the IRL. However,
this might lead to multiple boxes covering a single ob-
ject. Such boxes can be merged in a post-processing
step.
4 EXPERIMENTS
All evaluations were performed on the Graz50 data
set. To be able to compare results, fixed evaluation
data with 10000 sets was generated beforehand by re-
moving 20% of facade objects using the same method
as mentioned in Section 3.2. We start with quantita-
tive results and discuss qualitative results later. Tables
1 and 2 show a comparison of results with and with-
out pre-clustering. The output of the neural networks
consist of a probability map. Object probabilities be-
low 0.5 were considered as background. For calculat-
ing scores, we counted every classified matrix entry
in one of four sums: true positive (tp), false positive
(fp), true negative (tn) and false negative (fn). Tables
1 and 2 show average values of
Accuracy (Acc.) =
tp+tn
tp+tn + fp+fn
Precision (Prec.) =
tp
tp+fp
Recall (Rec.) =
tp
tp+fn
IoU =
tp
tp+fp + fn
.
We focused on Intersection over Union (IoU) as the
most meaningful evaluation score since it does not
consider background. All scores were computed sep-
arately on single facades. Then arithmetic means
over all facades of the evaluation data set were taken.
To determine whether the networks really improved
the facade layouts, we also calculated the values for
the unchanged network input. Here, precision is 1.0
because annotated facade objects also belong to the
ground truth. Missing facade objects contribute to
fn but not to accuracy. As it can be seen in Table 2,
the proposed RMD LSTM produces better results in
terms of accuracy, recall and IoU.
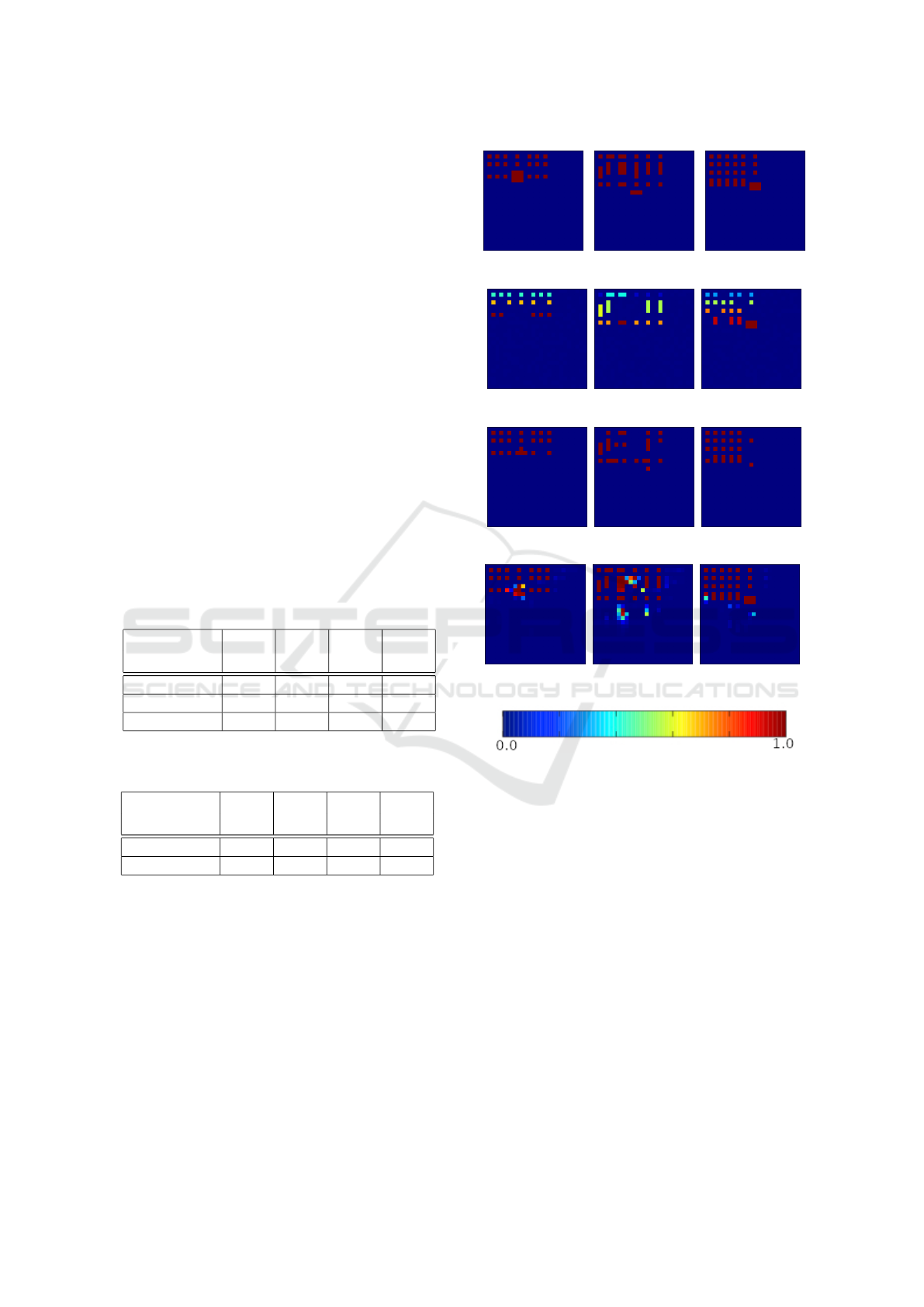
Figure 5 shows how QRNN and RMDLST make
recommendations for missing objects. Although we
trained the networks on the different CMP data set,
RMD LSTM was able to also complete Graz50 lay-
outs. QRNN somewhat failed to achieve similar re-
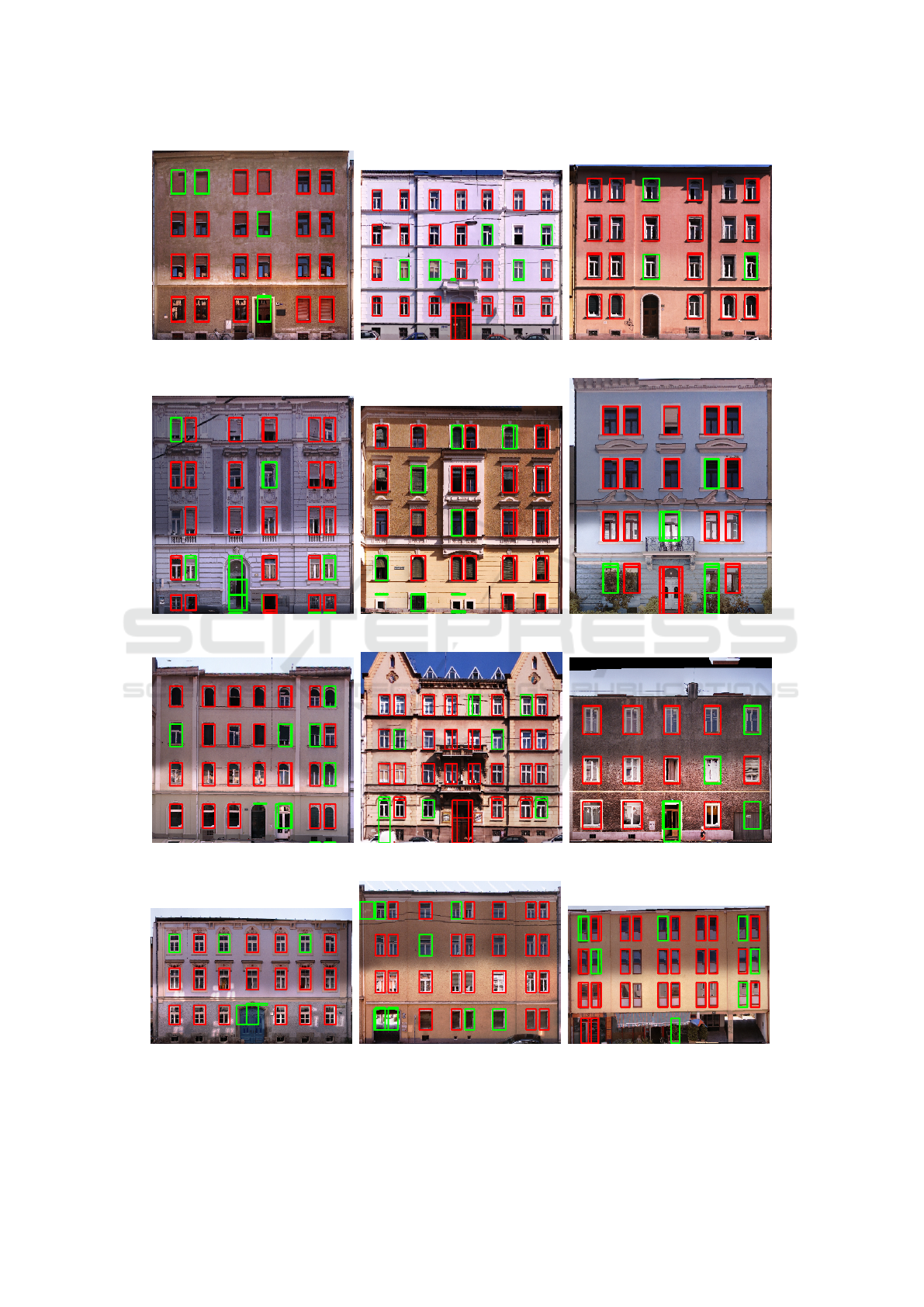
sults. Furthermore, Figure 6 shows a variation of ex-
amples of RMD LSTM recognition completion on the
data set used for evaluation. It can be seen that it com-
GRAPP 2021 - 16th International Conference on Computer Graphics Theory and Applications
20
pletes missing objects on facades like in Figure 6 (a),
(b), (h) and (i) in a good manner. But also that there
are some difficulties with objects that are composed of
more than one cell. It also adds door-shaped objects
in some places which the network considers useful but
which are not present in the original images.Besides
testing with graz50 data set, we also calculated scores
on training data. Here, QRNN performed better than
RMD LSTM. QRNN brought an absolute increase of
the IoU value by 0.18. If the style of facades is known
and if one can train networks on facades of the given
style then QRNN might be superior to RMD LSTM.
Furthermore, experiments were also conducted
with GridLSTM (Kalchbrenner et al., 2015), as it per-
formed better in language and text translation com-
pared to LSTM networks. It has an advantage over
them due to its grid of multi-way interactions. The
overhead generated by this grid is a disadvantage, be-
cause it increases the memory requirements. How-
ever, the memory requirement became too high for
the problem of facade structure completion discussed
in Section 1. Thus, we had to reduce batch size and
the number of hidden units, with these restrictions the
trained network classified all objects as background.
Table 1: Comparison of network results on binary input ma-
trices (without cluster labels).
Acc. Prec. Rec. IoU
START 0.938 1.000 0.682 0.682
MD LSTM 0.980 0.913 0.787 0.732
QRNN 0.973 0.888 0.720 0.664
RMD LSTM 0.979 0.907 0.785 0.726
Table 2: Comparison of QRNN and RMD LSTM on input
data labeled by clustering.
Acc. Prec. Rec. IoU
START 0.938 1.000 0.682 0.682
QRNN 0.969 0.901 0.641 0.604
RMD LSTM 0.984 0.925 0.832 0.779
5 CONCLUSIONS
Our experiments with RMD LSTM showed that
LSTMs are a suitable means to fill gaps in facade lay-
outs. RMD LSTM performed better than the origi-
nal MD LSTM and QRNN with an increase by 14%
in IoU compared to input data. The advantage of
such deep learning methods over grammar-based al-
gorithms is that no rules have to be defined explicitly.
Results shown in Figure 6 indicate that there is
still room for improvements. The main issue are ob-
(a) Ground truth (b) Ground truth (c) Ground truth
(d) Input (e) Input (f) Input
(g) QRNN (h) QRNN (i) QRNN
(j) RMD LSTM (k) RMD LSTM (l) RMD LSTM
Figure 5: Network output consisting of 25 × 25 probability
values (0 = blue, 1 = red) for three facades of the Graz50
data set: images (a) to (c) represent the ground truth, images
(d) to (f) show the input, images (g) to (i) present the output
of QRNN, and images (j) to (l) show the results of RMD
LSTM.
jects that are represented by more than one matrix en-
try. This occurs in rare cases and is therefore trouble-
some for learning. Examples are shown in Figure 6
(a), (d) and (j), where doors are incomplete or mis-
taken for a window. Other problems that can occur
are that objects are added by mistake, existing objects
are expanded, or a combination of both, resulting in
an unwanted contiguous cluster of objects.
So far, we have limited the training of neural net-
works to windows and doors. However, other facade
objects can be treated in a similar way. A major lim-
itation in the application of LSTMs is currently the
high memory usage. MD LSTM and RMD LSTM
required between 21 and 23 GB of GPU memory of
LSTM Architectures for Facade Structure Completion
21
(a) (b) (c)
(d) (e) (f)
(g) (h) (i)
(j) (k) (l)
Figure 6: Objects were randomly removed from the ground truth of the Graz50 dataset. Remaining objects are marked with
red boxes. The RMD LSTM network added most of the missing objects. Added objects are annotated with green boxes.
GRAPP 2021 - 16th International Conference on Computer Graphics Theory and Applications
22

the graphics card, depending on the number of hidden
units used. Future work should deal with reducing
memory consumption.
REFERENCES
Abadi, M., Agarwal, A., Barham, P., Brevdo, E., Chen,
Z., Citro, C., Corrado, G. S., Davis, A., Dean, J.,
Devin, M., Ghemawat, S., Goodfellow, I., Harp, A.,
Irving, G., Isard, M., Jia, Y., Jozefowicz, R., Kaiser,
L., Kudlur, M., Levenberg, J., Man
´
e, D., Monga,
R., Moore, S., Murray, D., Olah, C., Schuster, M.,
Shlens, J., Steiner, B., Sutskever, I., Talwar, K.,
Tucker, P., Vanhoucke, V., Vasudevan, V., Vi
´
egas,
F., Vinyals, O., Warden, P., Wattenberg, M., Wicke,
M., Yu, Y., and Zheng, X. (2015). TensorFlow:
Large-scale machine learning on heterogeneous sys-
tems. arXiv:1603.04467.
Arjovsky, M. and Bottou, L. (2017). Towards principled
methods for training generative adversarial networks.
arXiv:1701.04862.
Arjovsky, M., Chintala, S., and Bottou, L. (2017). Wasser-
stein GAN. arXiv:1701.07875.
Bertalmio, M., Sapiro, G., Caselles, V., and Ballester, C.
(2000). Image inpainting. In Proceedings of the 27th
annual conference on Computer graphics and inter-
active techniques, pages 417–424.
Bochkovskiy, A., Wang, C.-Y., and Liao, H.-Y. M. (2020).
YOLOv4: Optimal speed and accuracy of object de-
tection. arXiv:2004.10934.
Bradbury, J., Merity, S., Xiong, C., and Socher, R.
(2016). Quasi-recurrent neural networks. arXiv
arXiv:1611.01576.
Dai, D., Riemenschneider, H., Schmitt, G., and Van Gool,
L. (2013). Example-based facade texture synthesis. In
Proceedings of the IEEE International Conference on
Computer Vision (ICCV), pages 1065–1072.
Dehbi, Y., Staat, C., Mandtler, L., Pl, L., et al. (2016). In-
cremental refinement of facade models with attribute
grammar from 3D point clouds. ISPRS Annals of the
Photogrammetry, Remote Sensing and Spatial Infor-
mation Sciences, 3:311.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative adversarial nets. In Ghahra-
mani, Z., Welling, M., Cortes, C., Lawrence, N. D.,
and Weinberger, K. Q., editors, Advances in Neu-
ral Information Processing Systems 27, pages 2672–
2680. Curran Associates, Inc.
Graves, A., Fern
´
andez, S., and Schmidhuber, J. (2007).
Multi-dimensional recurrent neural networks. CoRR,
abs/0705.2011.
Gr
¨
oger, G., Kolbe, T. H., and Czerwinski, A. (2007).
OpenGIS CityGML Implementation Specification
(City Geography Markup Language). Open Geospa-
tial Consortium Inc, OGC.
Guillemot, C. and Le Meur, O. (2014). Image inpaint-
ing: Overview and recent advances. Signal Processing
Magazine, IEEE, 31:127–144.
He, K., Gkioxari, G., Dollar, P., and Girshick, R. (2017).
Mask R-CNN. In Proceedings of the IEEE Interna-
tional Conference on Computer Vision (ICCV), pages
2961–2969.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), pages 770–778.
Hensel, S., Goebbels, S., and Kada, M. (2019). Fa-
cade reconstruction for textured LoD2 citygml mod-
els based on deep learning and mixed integer linear
programming. ISPRS Annals of Photogrammetry, Re-
mote Sensing and Spatial Information Sciences, IV-
2/W5:37–44.
Hu, H., Wang, L., Zhang, M., Ding, Y., and Zhu, Q. (2020).
Fast and regularized reconstruction of building fa-
cades from street-view images using binary integer
programming. ISPRS Annals of Photogrammetry, Re-
mote Sensing and Spatial Information Sciences, V-2-
2020:365–371.
Huang, J.-B., Kang, S. B., Ahuja, N., and Kopf, J. (2014).
Image completion using planar structure guidance.
ACM Transactions on graphics (TOG), 33(4):1–10.
Kalchbrenner, N., Danihelka, I., and Graves, A. (2015).
Grid long short-term memory. arXiv:1507.01526.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Dollar, P.
(2017). Focal loss for dense object detection. In
Proceedings of the IEEE International Conference on
Computer Vision (ICCV), pages 2980–2988.
Mtibaa, F., Nguyen, K.-K., Azam, M., Papachristou, A.,
Venne, J.-S., and Cheriet, M. (2020). LSTM-based
indoor air temperature prediction framework for hvac
systems in smart buildings. Neural Computing and
Applications, pages 1–17.
Nazeri, K., Ng, E., Joseph, T., Qureshi, F. Z., and Ebrahimi,
M. (2019). Edgeconnect: Generative image inpainting
with adversarial edge learning. arXiv:1901.00212.
Riemenschneider, H., Krispel, U., Thaller, W., Donoser,
M., Havemann, S., Fellner, D., and Bischof, H.
(2012). Irregular lattices for complex shape grammar
facade parsing. In Proceedings of the 2012 IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 1640–1647.
Salehinejad, H., Sankar, S., Barfett, J., Colak, E., and
Valaee, S. (2017). Recent advances in recurrent neural
networks. arXiv:1801.01078.
Sherstinsky, A. (2020). Fundamentals of Recurrent Neu-
ral Network (RNN) and Long Short-Term Memory
(LSTM) network. Physica D: Nonlinear Phenomena,
404:132306.
Teboul, O., Kokkinos, I., Simon, L., Koutsourakis, P., and
Paragios, N. (2011). Shape grammar parsing via rein-
forcement learning. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 2273–2280. IEEE.
Tobin, J., Fong, R., Ray, A., Schneider, J., Zaremba, W., and
Abbeel, P. (2017). Domain randomization for transfer-
ring deep neural networks from simulation to the real
world. In Proceedings of the 2017 IEEE/RSJ Interna-
LSTM Architectures for Facade Structure Completion
23

tional Conference on Intelligent Robots and Systems
(IROS), pages 23–30.
Tyle
ˇ
cek, R. and
ˇ
S
´
ara, R. (2013). Spatial pattern templates
for recognition of objects with regular structure. In
Weickert, J., Hein, M., and Schiele, B., editors, Pat-
tern Recognition, pages 364–374, Berlin, Heidelberg.
Springer.
Wonka, P., Wimmer, M., Sillion, F., and Ribarsky, W.
(2003). Instant architecture. ACM Transactions on
Graphics (TOG), 22(3):669–677.
Yu, J., Lin, Z., Yang, J., Shen, X., Lu, X., and Huang,
T. S. (2018). Generative image inpainting with con-
textual attention. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 5505–5514.
Zhang, D. and Wang, D. (2016). Relation classification:
CNN or RNN? In Lin, C.-Y., Xue, N., Zhao, D.,
Huang, X., and Feng, Y., editors, Natural Language
Understanding and Intelligent Applications. ICCPOL
2016, NLPCC 2016. Lecture Notes in Computer Sci-
ence, volume 10102, pages 665–675, Cham. Springer
International Publishing.
GRAPP 2021 - 16th International Conference on Computer Graphics Theory and Applications
24
