
Three-step Alignment Approach for Fitting a Normalized Mask of a
Person Rotating in A-Pose or T-Pose Essential for 3D Reconstruction
based on 2D Images and CGI Derived Reference Target Pose
Gerald Adam Zwettler
1,2 a
, Christoph Praschl
1 b
, David Baumgartner
1 c
, Tobias Zucali
3 d
,
Dora Turk
3 e
, Martin Hanreich
1
and Andreas Schuler
1,4 f
1
Research Group Advanced Information Systems and Technology (AIST), University of Applied Sciences Upper Austria,
Softwarepark 11, 4232 Hagenberg, Austria
2
Department of Software Engineering, School of Informatics, Communications and Media,
University of Applied Sciences Upper Austria, Softwarepark 11, 4232 Hagenberg, Austria
3
AMB GmbH, amb-technology.ai, Hafenstraße 47-51 4020 Linz, Austria
4
Department of Bio and Medical Informatics, School of Informatics, Communications and Media,
University of Applied Sciences Upper Austria, Softwarepark 11, 4232 Hagenberg, Austria
Keywords:
Elastic Shape Alignment, Human Body Pose Detection, 3D Body Reconstruction, Silhouette Reconstruction.
Abstract:
The 3D silhouette reconstruction of a human body rotating in front of a monocular camera system is a very
challenging task due to elastic deformation and positional mismatch from body motion. Nevertheless, knowl-
edge of the 3D body shape is a key information for precise determination of one’s clothing sizes, e.g. for
precise shopping to reduce the number of return shipments in online retail. In this paper a novel three step
alignment process is presented, utilizing As-Rigid-As-Possible (ARAP) transformations to normalize the body
joint skeleton derived from OpenPose with a CGI rendered reference model in A- or T-pose. With further
distance-map accelerated registration steps, positional mismatches and inaccuracies from the OpenPose joint
estimation are compensated thus allowing for 3D silhouette reconstruction of a moving and elastic object with-
out the need for sophisticated statistical shape models. Tests on both, artificial and real-world data, generally
proof the practicability of this approach with all three alignment/registration steps essential and adequate for
3D silhouette reconstruction data normalization.
1 INTRODUCTION
To accurately determine one’s clothing sizes, conven-
tional manual measurement at the tailor or shop are
commonly used, as well as 3D scans of the entire
body. To allow for manual measurements at home,
e.g. to prevent from bad purchase of not fitting clothes
in online retail, depth sensor based measurement are
hardly applicable. Many customers only have a rough
knowledge of their individual body size. Addition-
ally, clothing sizes are neither nationally nor interna-
tionally standardized and different target markets and
a
https://orcid.org/0000-0002-4966-6853
b
https://orcid.org/0000-0002-9711-4818
c
https://orcid.org/0000-0002-0189-4718
d
https://orcid.org/0000-0003-3771-0041
e
https://orcid.org/0000-0003-4348-5426
f
https://orcid.org/0000-0003-1074-3222
manufacturers have developed different size names
and standards. The annual costs for return shipments
in the online retail market are a significant cost fac-
tor, numbered with approximately 550 billion USD
for the U.S. market in year 2020 (Orendorfff, 2019)
(Mazareanu, 2020). While on average around 12-
15% returns are common in online trade, returns in
the clothing sector reach a level of just under a third
(Statista, 2012) and mismatch in the size is the biggest
culprit (Murphy, 2020). Since returned goods always
cause effort and loss of value, there are organizational
efforts to reduce this high proportion.
In the course of the research project TrueSize
S.M.B.S., the technical foundation for an innovative
smart mobile body scanner utilizing monocular video
feed is therefore explored. With accurate knowledge
of the own clothing size, the costs for online clothing
retailers can be reduced.
Zwettler, G., Praschl, C., Baumgartner, D., Zucali, T., Turk, D., Hanreich, M. and Schuler, A.
Three-step Alignment Approach for Fitting a Normalized Mask of a Person Rotating in A-Pose or T-Pose Essential for 3D Reconstruction based on 2D Images and CGI Derived Reference
Target Pose.
DOI: 10.5220/0010194102810292
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
281-292
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
281

1.1 Problem Statement
Scanning a human person with a monocular smart
phone camera to reconstruct precise 3D avatars is a
challenging task in computer vision due to the highly
dynamic nature of the environment, starting with the
issue of object localization, segmentation and estima-
tion of the orientation. To gain sufficient 3D informa-
tion of an object with only one camera, incorporating
several views is inevitable. Thus, for 3D reconstruc-
tion of an object with only one camera system, either
the object needs to rotate with static camera or the
camera is moved around the statically placed object.
This constraint holds for both, monocular RGB video
feed and RGB-D depth data. Additional problems
with reconstruction from monocular images gener-
ally are an inaccurate camera model, non-orthogonal
aligned object/camera and the unknown distance to
the object preventing a direct calculation of the pixel
to mm scale factor for real-world proportions and
measurements. Furthermore, if a human is rotating on
a spot being captured with the video sequence, addi-
tional problems like inner body movement due to the
26 most prominent joints of human body kinematic
chain arise (Zatsiorsky, 1998). Besides rotating on
a spot, the local rotation axis cannot be kept that pre-
cisely, which indicates that straight forward silhouette
reconstruction is impossible.
1.2 State of the Art
The 3D reconstruction of objects from monocular im-
ages requires different state of the art approaches in
computer vision.
Localization of humans in images can be achieved
utilizing HOG features (Liu et al., 2013) or Haar Cas-
cades (Aguilar et al., 2017) but recent improvements
in deep learning (DL) allow for advancements. Nowa-
days, precise localization of humans can be achieved
utilizing DL models, e.g. OpenPose (Cao et al., 2019)
approximating limb and bone poses in 2D even in case
of partial occlusions. Based on this limb approxima-
tion, estimation of the orientation becomes feasible
too, assessing the hip-rotation with a plane between
chest and left/right hip (Wei et al., 2019) or utilizing
specific DL models (Xiang et al., 2017).
For person segmentation in videos, Grab cut ap-
proaches (Yu et al., 2019) as well as utilizing deep
learning approaches (Liu and Stathaki, 2017) is appli-
cable. With static camera systems and constant light-
ing, modeling the background as foundation for sub-
traction/differential imaging becomes possible as well
as e.g. evaluated in (Zeng et al., 2018) but is gener-
ally very sensitive to the signal-to-noise-ratio, motion
and changes on the lighting condition. The domain
of person segmentation can also be addressed utiliz-
ing 3D statistical shape models (Cootes et al., 1995;
Pishchulin et al., 2017) with demand for dataset-
specific registration and model adaption based on 2D
model projection. Other skeleton-based approaches
for 2D and 3D shape alignment originate from the
computer graphics and animation domain (Song et al.,
2013).
In the area of 3D shape reconstruction from
monocular images utilizing several camera sys-
tems, silhouette reconstruction is applicable (Mu-
layim et al., 2003) to derive the visual hull of the tar-
get object applying voxel carving on discrete 3D vol-
ume. If some kind of depth approximation is present,
silhouette reconstruction can be refined compared to
visual hull (Lin and Wu, 2008). Depth informa-
tion thereby can result from ToF sensor, DL models,
stereo image matching or utilizing photo-consistency
on computer graphics lighting models for reverse en-
gineering for depth approximation from input inten-
sity images (Seitz and Dyer, 1999). Furthermore,
for skeleton-based reconstruction approaches, epipo-
lar geometry allows to derive or validate 3D joint po-
sitions of the person from the 2D images (Li et al.,
2018).
1.3 Related Work
For 3D reconstruction of static objects, the use of 3D
sensors allows the implementation of holistic scan so-
lutions. With a moving scanner applying local surface
registration for building up an entire 3D mesh model,
ReconstructME offers a comprehensive framework
(Heindl et al., 2015). Even a Kinect sensor could be
used for 3D reconstruction process (Marchal and Ly-
gren, 2017). With only one static camera system in-
corporated, rotation of the person leads to best results
(Fit3D, 2020) while placing several camera systems
in a box, the person just has to stay steady for a cou-
ple of seconds (Sizestream, 2020). Nevertheless, all
of these approaches necessitate a supporting person
and special hardware not present when trying to mea-
sure at home.
Using statistical shape models for human body
anatomy together with registration and fitting pro-
cesses, it becomes the first time possible to get a 3D
reconstruction from a single monocular smart phone
feed only (Kocabas et al., 2019). Nevertheless, these
accurately fitted models are still only a generic shape
not considering anatomical variability.
To detect and analyze a human being in RGB in-
put images, both skeleton and body part segmentation
are a key aspect (Varol et al., 2017; Fang et al., 2018)
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
282

interpreting pose detection as alignment task. In the
work of Varol et al. (Varol et al., 2017) input skeletons
are used to register and align a 3D statistical human
body shape model. Thereby, the CAESAR-dataset
derived statistical shape models are adjusted to the in-
put pose to implicitly allow for body part segmenta-
tion and human 3D pose estimation as an implicit 3D
body reconstruction. Based on this 3D model align-
ment process, an arbitrary amount of synthesized CGI
images in real-world pose is provided, thus allowing
to train deep learning models for body part segmenta-
tion and relative depth approximation.
Another skeleton-based approach is proposed by
Fang et al. (Fang et al., 2018). It utilizes detected
skeleton keypoints to search for the closest body pose
match in a database of ground truth samples, directly
transferring the roughly fitting body part segmenta-
tion. A fully rigid 2D alignment process is performed
to roughly align the source and target body skele-
ton. Filling of the holes resulting from rigid body part
transformation and alignment to the input person sil-
houette in the image data is then achieved by a deep
learning model. In contrast to this concept, we uti-
lize ARAP transformation and the input image body
silhouette to directly align the measured body to the
reference target pose.
For this research work, some relevant aspects for
reconstructing the body of a person as 3D mesh
have already been published in the past as pre-
liminary work. The human-computer-interaction
paradigms for Hough-Space related member card
analysis (Pointner et al., 2018) is a key for getting
the pixel-to-world scale for accurate measurements.
To improve the rotation estimation of human beings
analyzed with OpenPose, the incorporation of optical
flow and an elliptic body model lead to further im-
provement (Baumgartner et al., 2020).
1.4 Research Question
We aim to answer the following research question: Is
it possible to create a pose-normalized person mask
based on a single monocular RGB image and pose
information from a CGI reference avatar to allow
for 3D silhouette reconstruction of a non-static and
elastic object? While targeting this issue, this paper
makes the following contributions:
• Approach for segmenting a person in a RGB im-
age using pose information with basic anthropo-
morphic constraints.
• CGI based 2D target pose as reference image in
the alignment process.
• 2D Shape alignment of person masks with
three-step alignment/registration approach includ-
ing As-Rigid-As-Possible (ARAP) transforma-
tions by aligned target skeleton-points.
As proof of concept, the applicability of silhouette re-
construction on the aligned person views is evaluated.
1.5 Alignment Approach Overview
In our proposed alignment approach we utilize Open-
Pose (Cao et al., 2019) to determine the body skeleton
from a person rotating in front of a monocular cam-
era system. The body silhouette is thereby segmented
with Grab cut (Rother et al., 2004) using seed areas
derived from a generic anthropomorphic model. Af-
ter estimating the body orientation by analyzing the
optical flow (Baumgartner et al., 2020), a reference
CGI avatar is utilized to align the skeletal model via
the ARAP transformation (Sorkine and Alexa, 2007)
following the mesh triangulation. With subsequently
to follow distance-map based rigid registration w.r.t.
the CGI reference contours and a refinement process
for the body extremities (arms, legs), the normalized
body mask allows 3D silhouette reconstruction of an
elastic object, namely the person rotating.
2 MATERIAL
In the following sections we present our method
for creating pose-normalized person masks from a
monocular RGB image. The shown examples are
based on CGI models of the open source software
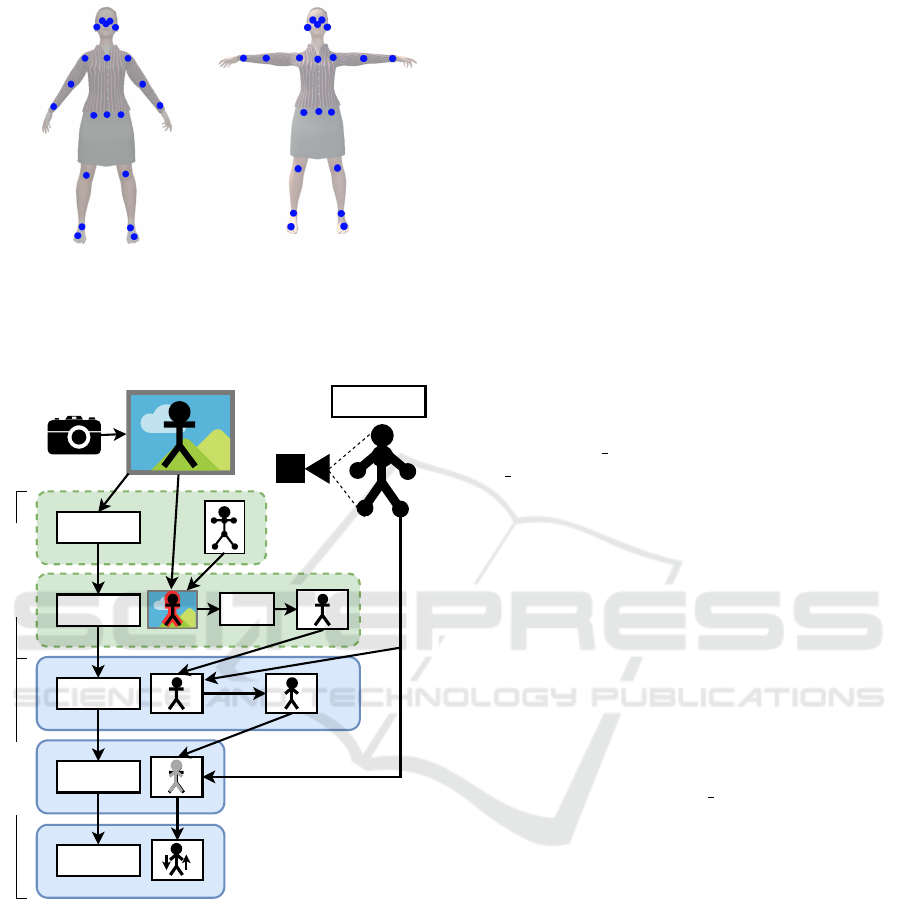
MakeHuman (Bastioni et al., 2008), as shown in Fig-
ure 1. In addition to the computer generated inputs,
we also use real world images to evaluate our align-
ment pipeline. Therefore, we have acquired images
in portrait orientation utilizing a static camera system
that are resampled to 800 × 1000 pixel. To fully cap-
ture the person’s body, eight images at equidistant ro-
tation of 45
◦
each are acquired.
Furthermore, we use OpenPose (Cao et al., 2019)
to retrieve a Body25 key point model (Hidalgo and
Fujisaka, 2019) representation of the person’s pose.
Our model is simplified in small details in the foot
area, where we only utilize the pose information of
toes as group and using the ankle without heels. Sim-
ilarily, the skeleton of the head is simplified by con-
necting head’s main point with the eyes, see Figure 1
for our proposed adaption of the pose model.
3 METHODOLOGY
In this chapter we present our approach for calculat-
ing a pose-normalized person mask from a monoc-
Three-step Alignment Approach for Fitting a Normalized Mask of a Person Rotating in A-Pose or T-Pose Essential for 3D Reconstruction
based on 2D Images and CGI Derived Reference Target Pose
283
(a) (b)
Figure 1: Reference pose-model in A-pose (a) and respec-
tively in T-pose (b) used as basis for the transformation pro-
cess. The female 3D model in the background is just dis-
played for a better understanding of the pose model.
OpenPose
Background
Removal
Alignment
Registration
Refinement
GrabCut
CGI Rendering
Camera
Preprocessing
Alignment
Figure 2: Overview of the process with a monocular image
as input, from which pose information is extracted, that is in
turn used for the background removal. Based on the created
person mask the alignment is done using a reference pose
from a CGI model. The alignment result is finally registered
and refined.
ular RGB image and known target pose information
derived from reference CGI avatars. This method is
based on two key processes, the pre-processing as per-
son segmentation (OpenPose, GrabCut) and the actual
pose-normalization (Alignment, Registration, Refine-
ment) as three-step alignment pipeline for body mask
normalization, see Figure 2.
3.1 Object Segmentation
The approach we have chosen to follow is apply-
ing GrabCut (Rother et al., 2004), an optimization
algorithm that estimates a Gaussian mixture model
of the color distribution associated with the target
and the color distribution associated with the back-
ground based on graph cuts, initialized in a novel an-
thropomorphic way. Namely, instead of adopting a
user-specified bounding-box surrounding the target as
the initial “guess” for the foreground (FG) and back-
ground (BG), we form a mask image that incorporates
more information about the object and is based upon
the skeletal points detected via OpenPose. The com-
plete set of the adapted Body25 key point model is
used here to maximize the detection accuracy. The
interference with the algorithm as introduced above
is possible because the GrabCut algorithm can addi-
tionally take the seed information for the probable
foreground (PR
FG) and probable background area
(PR BG) as arguments. By initializing the probable
foreground and probable background we are giving
the algorithm more hints as to where the person is ex-
pected to be, yet allowing it enough freedom to oper-
ate, that is, search for the optimal graph cut.
The procedure goes as follows. The detected
skeletal points are firstly connected into a skeleton-
like structure composed of straight lines mimicking
human bones. The thickness of a bone is selected to
be proportional to the product of the certainties the
linked points are estimated with, provided by Open-
Pose. This skeleton-like composition is assumed to
surely belong to the human that is to be segmented,
i.e. foreground (FG). The layer that follows second is
the probable foreground (PR FG) and its creation is
more intricate. The probable foreground should cap-
ture as much of the human body as possible, but not
more than that, as it might steer the optimization in
a wrong direction in case the background scenery is
lively. The reasons why the process of defining it is
intricate lie in the fact that the information about the
shape of the human body is only partially contained
in the skeleton points. An anthropomorphic model
of the human anatomy would therefore be needed to-
gether with categorical references specific to the per-
son in the image in order to complete the shape of
the body. Although pursuing this concept is still our
ultimate objective, our current implementation repre-
sents a compromise between the algorithm accuracy
and complexity. More precisely, the probable fore-
ground is obtained through bone-specific morpholog-
ical dilation of the (sure) foreground. The same rea-
soning is adopted to define the probable background.
Finally, the distinctively designed mask is given to the
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
284

GrabCut algorithm for refinement.
3.2 Binary Person Silhouette Image
Alignment and Normalization
This section describes the second step of the pre-
sented process and refers to the pose alignment of the
binary person mask. For this, a 3D avatar model is
used as reference pose. This pose is adapted accord-
ing to the person’s original limb sizes, that are defined
by the extracted skeleton points from the input image.
Using those adapted skeleton joints as anchors, the
person mask is transformed with an ARAP approach.
3.2.1 CGI Rendering of Reference Person
The pose normalization uses a three-dimensional CGI
model as reference. This model incorporates skele-
ton positions and thus determines the target pose of
the person in the image and can basically represent
any state, for example T-pose or A-pose as shown in
Figure 1. In the presented approach we are using a
model in T-pose as transformation reference. Based
on the reference model and the position of the re-
quired limbs, the associated skeleton joints can be de-
termined and used in the subsequent transformation
process. Since only the skeleton information is re-
quired, textures are not necessary for the model.One
issue that has to be taken into account is the field of
view of the camera and the projection of the reference
model joints from 3D to 2D which is covered in a pre-
processing step to allow for undistorted alignment.
We consider the rotation angle of the person in the
image as given. Using this rotation we can project
the three-dimensional model into the 2D space of the
binary image that is normalized in the following steps.
3.2.2 Limb Model Alignment
The CGI reference model represents the 2D projected
target pose, but is not associated with the limb sizes of
the person. Thus, only the mid chest point P
mc
of the
reference model M
re f
as well as the angle between the
limbs as kinematic chains C(P
1
, P
2
, ..., P
n
) are utilized
to align the input limb model M
in
of the person. The
input skeleton positions P
i
∈ P
skel
are thereby trans-
formed as P
0
i
in a way that the limb orientation is
aligned according to reference model M
re f
skeleton
denoted as P
00
i
. Starting from the mid chest point,
the kinematic chains for the head C
head
(P
mc
, P
head
)
and the shoulders C
shoulders
[l|r]
(P
mc
, P
shoulder
[l|r]
) as
well as the spine C
spine
(P
mc
, P
mh
) and subsequently
the hips as C
hips
[l|r]
(P
mh
, P
hip
[l|r]
) are aligned. With
the torso aligned, the exterior connected limbs, i.e.
arms C
arm
[l|r]
(P
shoulder
[l|r]
, P
elbow
[l|r]
, P
hand
[l|r]
) and legs
as C
leg
[l|r]
(P
hip
[l|r]
, P
knee
[l|r]
, P
f oot
[l|r]
, P
toe
[l|r]
), are aligned
according to the reference pose for left and right body
side cf. [l|r].
Since some limbs influence other limbs, e.g. when
moving the upper arm also the forearm is moved,
the order is important in the alignment process. For
this reason, the first step is to equate the chest and
hip position of the source and the reference skele-
ton as C
0
spine
(P
0
mc
, P
0
mh
). Afterwards, all limbs are
transformed starting with the limbs, that are anatom-
ically near to the body center, namely the shoul-
ders C
0
shoulders
[l|r]
:= T (C
shoulders
[l|r]
, P
0
mc
, M
re f
), short
as C
0
spine
→ C
0
shoulders
, and the hips as C
0
spine
→ C
0
hips
.
Based on the transformed positions for the shoul-
der (P
0
shoulder
[l|r]
) and the hips (P
0
hip
[l|r]
), the left and
right arms, as well as the legs, are transformed as
C
0
shoulders
[l|r]
→ C
0
arm
[l|r]
and C
0
hips[l|r]
→ C
0
leg
[l|r]
, respec-
tively.
For the transformation of a kinematic chain,
the limbs are iteratively transformed with the
end point of the last limb as start. Thus,
T (C, P
0
start
, M
re f
) := (P
0
start
, R(P
0
start
, P
start
, P
2
, α
1
), ...,
R(P
0
n−1
, P
n−1
, P
n
, α
n−1
)) for C(P
1
, P
2
, ..., P
n
).
The difference between target rotation α
i
=
∠
−−−−→
P
i
, P
i+1
derived from the reference model M
re f
and
the current rotation β
i
= ∠
−−−−→
P
0
i
, P
0
i+1
is used to calculate
the corrective 2D rotation matrix R
2D
(φ) to apply, see
Equation 1.
The rotation transformation R per limb is applying
a rotation to balance the orientation of the particular
limbs as well as a translation to fix the position w.r.t.
the transformed input skeleton position P
0
start
.
P
0
i
= R(P
0
i−1
, P
i−1
, P
i
, α
i−1
) :=
(P
i
− P
i−1
) · R
2D
(α
i−1
− β
i−1
) + P
0
i−1
(1)
The limb alignment is shown using clippings in
Figure 3, where (a) shows the original skeleton ex-
tracted from the input image, (b) the reference model
and (c) the aligned model, with the limb orientations
of (b) and the limb sizes of (a).
3.2.3 Mesh Alignment
The mesh alignment process is based on the seg-
mented person mask, as well as the input skeleton
points aligned to the reference model M
0
in
. This part
of the presented method can be separated in five ma-
jor steps, namely (I) contour extraction, (II) contour
simplification, (III) triangulation, (IV) mesh transfor-
mation and (V) mesh projection.
Three-step Alignment Approach for Fitting a Normalized Mask of a Person Rotating in A-Pose or T-Pose Essential for 3D Reconstruction
based on 2D Images and CGI Derived Reference Target Pose
285
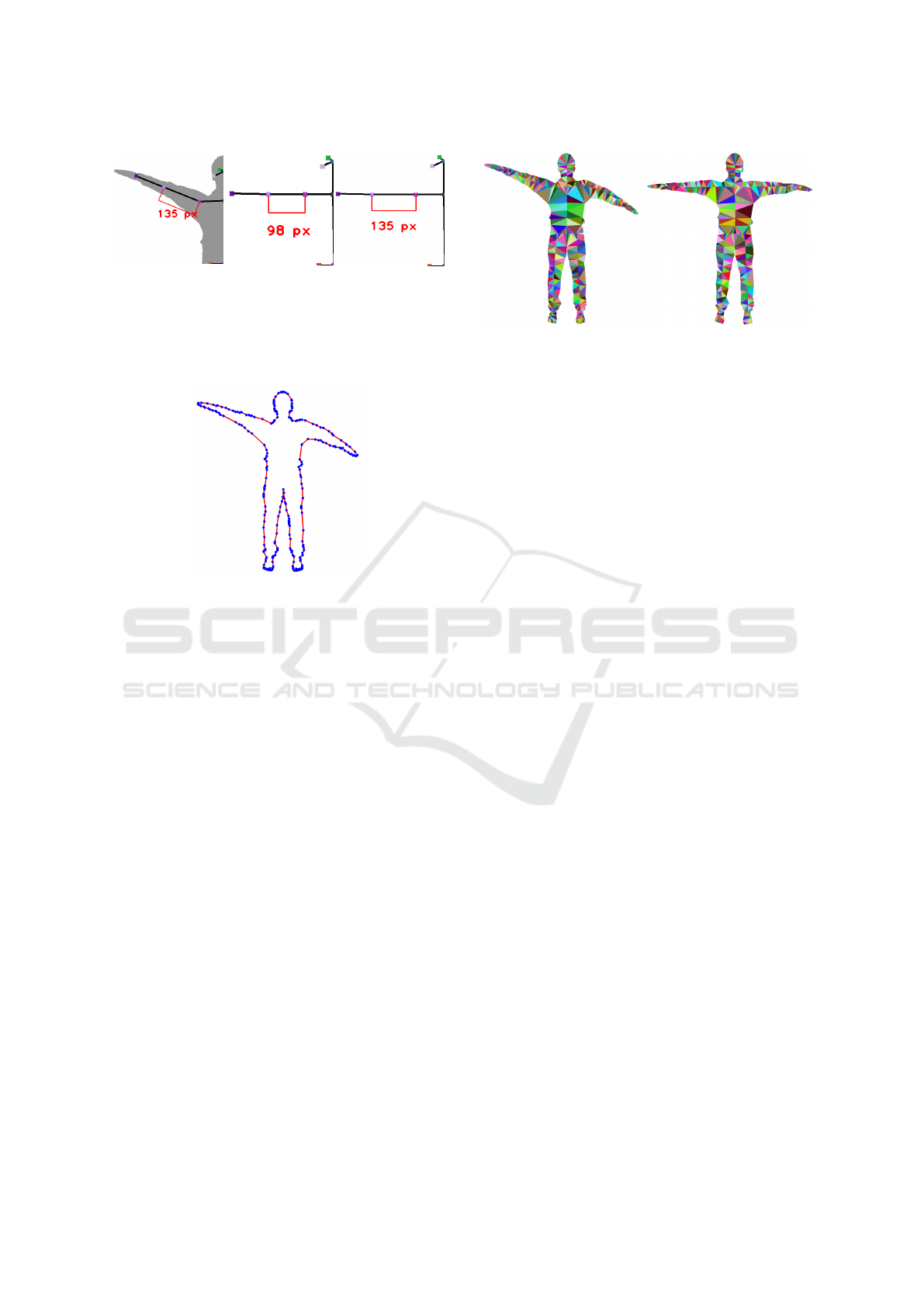
(a)
(b)
(c)
Figure 3: Comparison of clippings of the original skele-
ton from the input image overlaying the segmentation result
(a), the reference model (b) and the aligned model (c). The
aligned model consists of the limb sizes of (a) and the limb
orientation of (b).
Figure 4: The largest extracted contour of the segmented
image (continuous red line) is simplified to the most rel-
evant contour points (blue) applying the Douglas-Peucker
simplification algorithm with a threshold of 1.0.
First of all, the contour set C = (c
1
, c
2
, ..., c
n
)
with c
i
=< x
i
, y
i
> as 2D border coordinates is ex-
tracted from the segmented binary mask using the
topological structural analysis algorithm of Suzuki
and Abe (Suzuki et al., 1985). This algorithm extracts
all continuous contours in a given binary image. We
assume that the largest contour in the image repre-
sents the person after the segmentation step and all
other contours represent some irrelevant segmentation
fragments, see Fig. 4.
The extracted contour represents a continuous se-
quence of neighboring pixels. Since pixel neighbors
of a contour are positioned homogeneously along a
virtual polyline, those pixels can be represented in
a simpler way using the extreme points along the
contour, where the orientation of the pixel sequence
changes with a certain threshold. For this process
we represent the polygon as a connected sequence of
points and use the Douglas-Peucker algorithm (Dou-
glas and Peucker, 1973) parameterized with a toler-
ance of 1.0. This algorithm reduces the number of
components of a curve and results in a similar shape
with fewer points, see Figure 4.
In the following step, the binary mask is triangu-
lated based on the minimized contour, in combination
Figure 5: Triangulation result of the Constrained Delaunay
algorithm using the simplified mask contour as constraints
and the aligned limb model with n = 5 interpolated interim
points per limb (left). Resulting mesh after deformation of
triangulation result using the interpolated reference model’s
skeleton points as moving anchors for the ARAP transfor-
mation algorithm (right).
with the skeleton points of the input image. To keep
the triangles within the body silhouette, a constrained
triangulation method is required. Chew presents an
adapted version of Delaunay’s triangulation process
(Chew, 1989) that considers non-crossing edges as
borders perfectly applicable for our task. The algo-
rithm uses the contour points as well as the skeleton
points and results in a set of triangles, a so called
mesh, representing the given binary mask. To im-
prove the input for the transformation not only are
we using the skeleton points but also interpolated in-
terim positions along the limbs. In the following ex-
ample images we have used m = 5 interim positions
per limb. Using this procedure, we are able to create a
denser mesh, that can be transformed in a more local
way. Such a mesh is shown in Figure 5.a.
The skeleton points are added to the triangulation
process for defining static anchors for the transforma-
tion. Those anchors are used as reference points for
the deformation of the mesh by changing their po-
sition. The target positions are represented by the
transformed input model M
0
in
. All connected mesh
points are as well transformed in a weighted way
based on their distance to the surrounding anchors.
This process is done using the ARAP transforma-
tion algorithm (Sorkine and Alexa, 2007). The algo-
rithm’s area of application is the deformation of three-
dimensional surfaces. Therefore, it uses indices of
points in the original mesh together with the destina-
tion position of these points and transforms the mesh
according to this movement of anchor points. In our
presented approach we are using the algorithm in a
2D context, so we have to project the triangulation re-
sult into the 3D space by converting 2D pixels to 3D
points with a depth-information of 0.0.
Since we consider the orientation of the person,
i.e. rotation around the longitudinal axis of the body,
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
286

as given, we can determine which skeleton points are
visible in the image and can constraint the transforma-
tion. For example, the transformation of the mask of a
person with the left half in front of the camera, should
not consider points of the right half (e.g. right shoul-
der), because they are covered by the visible half of
the body. Those points are removed from the anchor
list before transforming the triangulated mesh. The
result of the mesh transformation is shown in Figure
5.b.
After the transformation process we project the
three-dimensional mesh back to the two-dimensional
image space for re-creating the binary mask.
3.3 Registration of Multi-perspective
Silhouette Images
According to the orientation of the person relative to
the camera, the accuracy of OpenPose skeletal points
varies, what manifests in vertically misplaced hip and
shoulder positions. Thus, as not even P
mc
can be used
as reliable anchor, the aligned limbs and body silhou-
ette must be correctly placed applying a registration
process. From the CGI rendering, not only the refer-
ence skeleton/limb positions P
00
i
but also the reference
contour C
00
is derived. As scale is already balanced
with the limb alignment process, contour registration
only has to cover translations T
x
, T
y
and rotation R as
affine transformations. While the registration prob-
lem could easily be addressed utilizing ICP (iterative
closest point), the use of an euclidean distance map
D
euclid
allows to speed up the asymptotic run-time
complexity from O(n ∗ m) to O(n) for n = |C | and
m = |C
00
|. The rigid registration problem is defined
with mean-squared error (MSE) metric as
C
0
= Trans(C , θ
best
, T
x
best
, T
y
best
)
(2)
where the best transformation parameters lead to
minimal squared distances between the contours C
0
and C
00
, see Equation 3
θ
best
, T
x
best
, T
y
best
=
argmin
θ,T
x
,T
y
|C |
∑
i=1
(D
euclid
(C
00
)[Trans(C , θ, T
x
, T
y
)[i]])
2
(3)
C
0
Trans
= Trans(C , θ
best
, T
x
best
, T
y
best
)
(4)
with transformation parameters in discrete search
space θ ∈ [−θ
min
;θ
max
], T
x
∈ [−T
x
;T
x
] and T
y
∈
[−T
y
;T
y
]. The discrete search space thereby com-
prises k = 11 steps, i.e. radius r = 5, for each
of the three variables (θ, T
x
, T
y
) and for each of the
m = 10 optimization runs according to scale factor s
i
with [−r ∗ s
i
, −(r − 1) ∗ s
i
, ..., 0, ...,(r − 1) ∗ s
i
, r ∗ s
i
]
as search offset for globally optimal parameters from
the last entire run. To go over from global to local
search with increasing number of optimization runs
performed, the search space scale factor is reduced
with s
i
= s
i−1
∗ 0.9 and initial s
1
defined from im-
age resolution and anthropomorphic considerations.
Thus, for m = 10 optimization runs and r = 5 search
space radius, overall only 10 ∗ 11 ∗ 11 ∗ 11 = 13, 310
discrete transformation parameter permutations need
to be evaluated to significantly compensate for Open-
Pose pose inaccuracies. The transformation is applied
to the skeletal points P
0
i
too, denoted as P
0
trans
i
.
3.4 Refined Alignment of Human Body
Limbs as Kinematic Chains
Alignment of the limbs and subsequent registration
as delineated in section 3.3 generally can compensate
for displacements of human motion during rotating
on the spot. Nevertheless, especially for thin limbs
such as the arms and very slim people it is important,
that the aligned contour stays precisely within the ex-
pected target limb areas as prerequisite for 3D recon-
struction. Thus, the kinematic chains with skeletal
points P
0
trans
i
are registered again by calculating the
best correction rotation β
i
at each joint position. The
error is thereby determined with the target distance
map D
euclid
(C
00
) on the contour points C
0
Trans
that
are transformed according to the closest limb posi-
tion P
0
trans
j
= ClosestPoint(C
0
Trans
, P
0
i
) for every skele-
tal point P
i
∈ P
0
. Thus, the optimal correction ro-
tations G = (γ1, γ2, ..., γn) are searched to minimize
the MSE on the contour distance map positions, see
Equation 5-7.
G
best
= (γbest
1
, γbest
2
, ..., γbest
n
) =
argmin
(γ1,γ2,...,γn)
n=|C |
∑
i=1
(D
euclid
(C
00
)[T
corr
(C
0
Trans
[i],
ClosestLimbP(C
0
Trans
[i]), γi))
2
(5)
T
corr
(C
0
Trans
[i], P
0
i
, γi) :=
(C
0
Trans
[i] − P
0
i
) ∗ R
2D
(γi) + P
0
i
(6)
ClosestLimbP(C
i
) := P
0
j
|P
0
j
∈ P ∧
(∀P
0
k
∈ P , P
0
j
6= P
0
k
: ||C
i
− P
0
j
|| ≤ ||C
i
− P
0
k
||)
(7)
The limb positions P
0
j
∈ P are then
transformed with the optimal gamma val-
ues G
best
= (γbest
1
, γbest
2
, ..., γbest
n
) as
P
000
j
= T
corr
(P
0
j−1
, P
0
j
, γbest
j
). These transformed
limb positions implicitly incorporate the limb correc-
tions from the pose (cf. section 3.2.2), the registration
Three-step Alignment Approach for Fitting a Normalized Mask of a Person Rotating in A-Pose or T-Pose Essential for 3D Reconstruction
based on 2D Images and CGI Derived Reference Target Pose
287
(cf. section 3.3) and the recently introduced refine-
ment. Nevertheless, the contour will not be properly
transformed close to the joints as only the closest
limb is taken into consideration. Consequently,
the limb alignment process is re-run once with
the optimized limb positions P
000
j
replacing M
re f
as
new optimized target positions for transforming the
original positions P
j
. This way, the ARAP transfor-
mation is re-run on the optimized target positions for
improved and reliable quality of results.
4 IMPLEMENTATION
The implementation of the presented approach fol-
lows a microservice architecture and is due to the
project environment mainly done using the Java pro-
gramming language. While the image processing
parts were developed using the Java build of the
OpenCV library,(Bradski, 2000), the mesh transfor-
mation is done using the C++ libigl library,(Jacobson
et al., 2018). To be able to access the C++ trans-
formation service from the Java side, it is wrapped
by a RESTful service and put into a Docker,(Merkel,
2014) container, that receives the triangulated mesh
as OFF-file as well as the source and target anchor
points as CSV-files and responses with an OFF-file
containing the transformed mesh.
5 RESULTS
5.1 Object Segmentation
This section discloses validation of the person seg-
mentation routine as described in section 3.1 on a CGI
example with a nonuniform background.
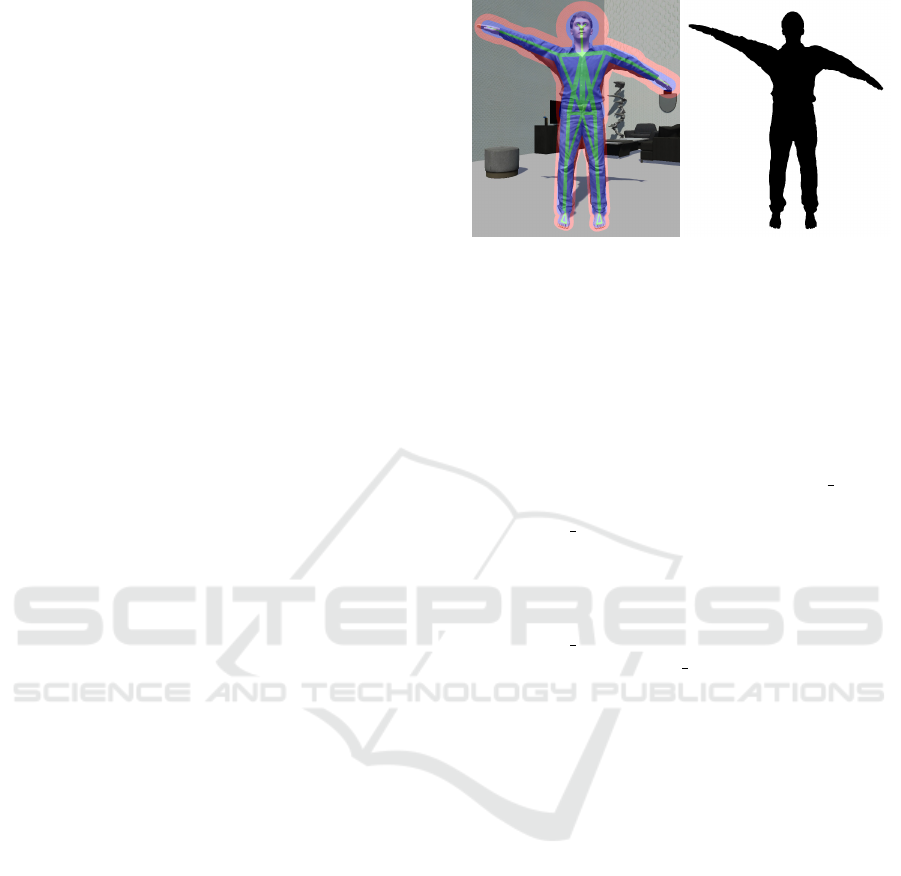
Figure 6.a displays the considered image together
with the mask designed to initialize the GrabCut al-
gorithm laid over it. The sure foreground composed
of connections between the joints detected by Open-
Pose is given in green. The connection are made in
a way that allows us to capture the basic structure of
almost any body shape. Dilation of this structure in
a fashion that aims to introduce proportions common
for the human body yields probable foreground given
in blue. The major part of the person’s body is cov-
ered adequately; nevertheless, a special attention had
to be given to the area around the hands and feet as the
data indicating joints there are sparse. The probable
foreground is “wrapped” by the probable background
indicated in red. Its thickness is a precarious param-
eter as everything outside of it will be discarded, and
(a) (b)
Figure 6: Input for the segmentation, showing the RGB in-
put image with the mask for the GrabCut initialization laid
over it (a), and the segmentation output (b).
everything inside will be given a fair chance to belong
to the person. This step finalizes the initial seed.
Figure 6.b shows the output of the proposed rou-
tine, mask refined by GrabCut, portrayed as a bi-
nary image: the pixels belonging to the sure fore-
ground (FG) and probable foreground (PR FG) are
depicted black, as opposed to the probable back-
ground (PR BG) and sure background (BG) pixels
rendered in white.
Figure 6b shows the output of the proposed
routine—mask refined by GrabCut: the pixels belong-
ing to the sure foreground (FG) and probable fore-
ground (PR FG) are kept intact, as opposed to the
probable background (PR BG) and sure background
(BG) pixels rendered in black.
By comparing Figure 6.a and Figure 6.b, one can
see that, although initialized with a seed already quite
close to the optimum, the GrabCut algorithm sep-
arated the probable foreground from the (probable)
background very accurately. Parts of the head and feet
were initially estimated as probable background, yet
the optimization algorithm successfully brought them
back into the (probable) foreground. Similarly, the re-
dundant area around the hands which had been there
due to the conservative initialization was removed.
Our approach is further validated on a subset of
UPi-S1h images originating from the Leeds Sports
Pose dataset, its extended version and the MPII Hu-
man Pose Dataset (Lassner et al., 2017). Images on
which OpenPose failed to detect human keypoints are
not considered for validation as the proposed segmen-
tation approach entirely relies upon them. Of 999 im-
ages in the selected subset, 962 successfully passed
the routine. To quantitatively express the obtained
segmentation results, we compute the Jaccard index
(JI), a similarity measure also known as Intersection
over Union. The resulting median value over the 962
images equals 0.926.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
288
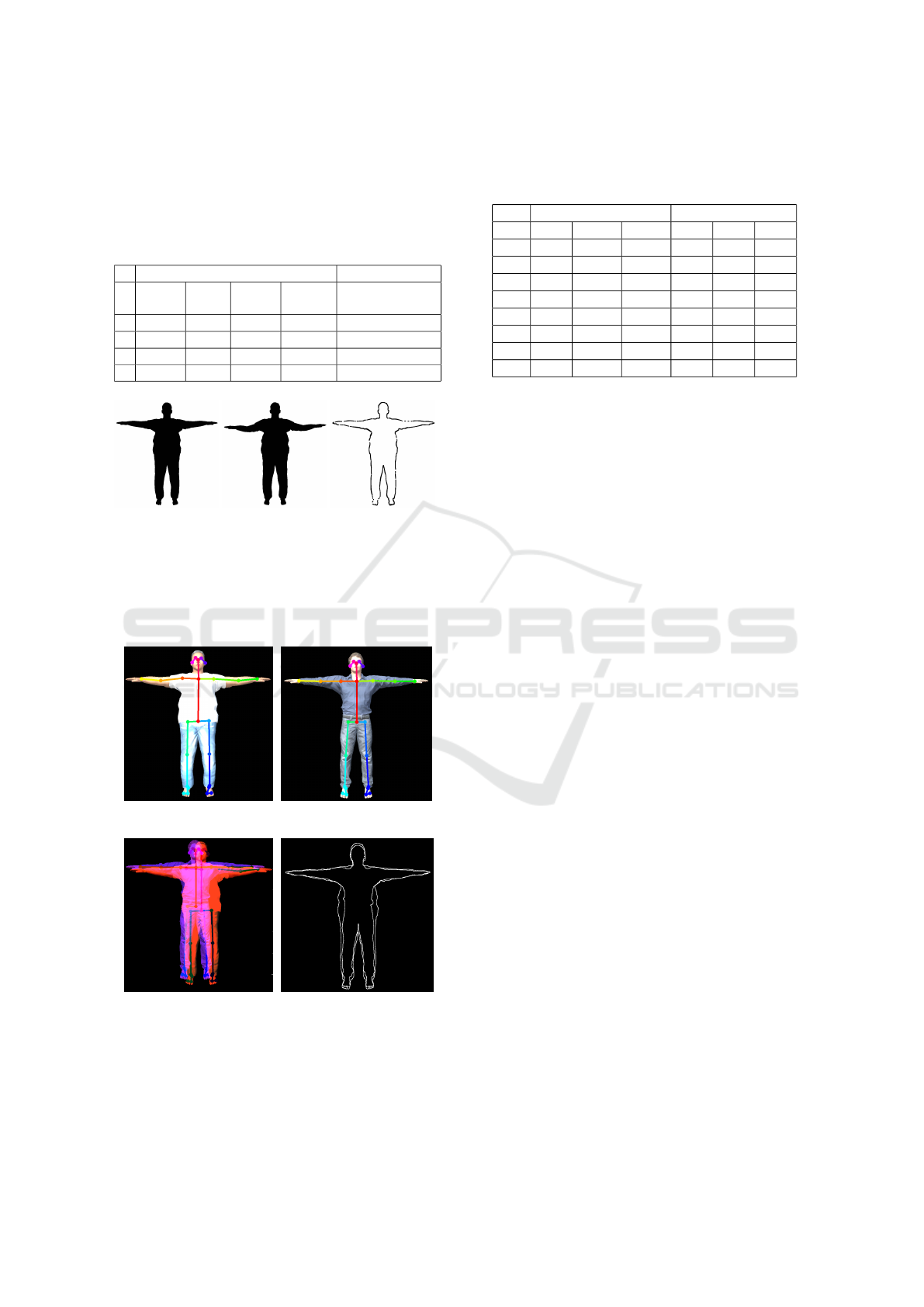
Table 1: Examples for the evaluation of the alignment pro-
cess showing the randomized skeleton joint offsets used for
the transformation. After transforming back to the original
pose the Dice Coefficient was calculated using a difference
image between the original image and the result of the back
transformation. This coefficient shows a correspondence of
about 97% and is listed below.
Skeleton Joint px-Offset (y-Axis)
#
Left
Elbow
Left
Wrist
Right
Elbow
Right
Wrist
Dice Coeff. (%)
0 27 19 33 30 96.9971
1 45 43 48 23 96.3649
2 14 17 24 25 97.2731
3 42 19 20 10 96.1066
(a) (b) (c)
Figure 7: Sample images for the evaluation of the mesh
alignment showing the segmentation of the original CGI
model (a), the randomly transformed model (b) and the
difference image between the original and the back trans-
formed model (c). The difference image was dilated r = 1
for a better readability.
(a) (b)
(c) (d)
Figure 8: After alignment, the input person (a) is registered
w.r.t. CGI reference silhouette (b) in a manual way utilizing
visual inspection (c) and fully-automated (d).
Table 2: Manual and automated registration error calculated
from ground truth at varying orientation θ = n · 45, n = 0...7
and distance error d
err
= |T
x
T
xy
|.
manual auto
θ ∆T
x
∆T
y
d
err
∆T
x
∆T
y
d
err
0 4.18 6.01 7.32 1.68 2.25 2.81
45 0.26 9.96 11.96 0.07 2.91 2.91
90 9.80 12.96 15.46 0.43 0.43 0.61
135 2.22 0.37 2.25 2.28 0.18 2.28
180 1.81 0.34 1.84 1.71 0.80 1.89
225 5.83 3.73 6.91 1.72 0.73 1.87
270 6.50 2.40 6.93 6.44 0.61 6.47
315 0.26 7.49 7.50 2.24 4.33 4.88
5.2 Mesh Alignment
The mesh alignment process is evaluated using mul-
tiple binary images of different, segmented CGI 3D
models. In addition to the images, also the pose in
form of the position of the skeleton joints is known
per model. Based on this information, the models
are transformed by randomly and independently mov-
ing the skeleton joints of the arm by maximal 50
px along the y-axis. Afterwards, the aligned meshes
are transformed back using the corresponding original
pose. Using the original image and the re-transformed
model, a difference image, with a maximal pixel dis-
tance of 2 px, and furthermore the Dice Coefficient
(DC) (Carass et al., 2020) is calculated to determine
the accuracy of the alignment process. The DC re-
sults in a deviation of approximately 3%, that only
occurs in the model’s edge area. This error can be
traced back to the contour discretization in the align-
ment process for improving its performance. The
mentioned tests are listed in Table 1 and are shown
in Figure 7.
5.3 Registration of Multi-perspective
Silhouette Images
The registration utilizing sum of squared errors (SSE)
for the contour distance aims at adjusting the position
of the current contour w.r.t. the CGI rendered refer-
ence shape. Thereby, body shape (slim, obese accord-
ing to BMI) mismatch between the current person and
the CGI and difference in gender do not affect quality
of results as seen in the subsequent test cases. Never-
theless, mismatches in skeleton position arising from
OpenPose inaccuracies are compensated in a very ro-
bust way, cf. Figure 8 and Table 2.
The automated runs take 1153ms on average
while visual-guided registration is achieved utiliz-
ing MeVisLab software (Ritter et al., 2011). The
measured errors for automated registration µ
auto
=
Three-step Alignment Approach for Fitting a Normalized Mask of a Person Rotating in A-Pose or T-Pose Essential for 3D Reconstruction
based on 2D Images and CGI Derived Reference Target Pose
289
(a) (b)
Figure 9: Even for test cases with mismatch in gender and
pose (a), the automated contour registration is still feasible
applying SSE distance metric (b).
Figure 10: Even if the body pose is not aligned to the refer-
ence skeleton, with precise automated registration the sub-
sequent 3D reconstruction is still possible.
2.964, [0.61; 6.47] clearly outperform the manual ap-
proach µ
auto
= 7.273, [1.84; 7.27].
Even in case of registering misaligned shapes of
a female input dataset with the aligned male refer-
ence dataset, the automated registration still leads to
robust results with average difference ∅∆T
x
= 4.54
and ∅∆T
y
= 12.53 compared to manual registration,
thus still allowing 3D reconstruction, see Figure 9 and
Figure 10.
5.4 Refined Alignment of Human Body
Limbs as Kinematic Chains
To test the alignment of the kinematic chains
(left/right arm/leg) as final refinement process, target
registration tasks are prepared and then used for re-
finement, see Figure 11. The average error is low with
∅∆β
1
= 0.034 and ∅∆β
2
= 0.074, see Table 3.
Table 3: Limb alignment performed for right arm. The tar-
get transformation for lower/upper arm angles β
1
and β
2
are
precisely reached.
target result delta
# β
1
β
2
β
1
β
2
∆β
1
∆β
2
1 20.0 -10.0 -20.0 10.0 0.0 0.0
2 11.2 2.3 -11.25 -2.25 0.05 0.05
3 0.0 0.0 0.0 0.0 0.0 0.0
4 -25.0 -17.77 25.0 17.75 0.0 0.02
5 3.87 -7.8 -3.75 7.5 0.12 0.3
Figure 11: Based on body part segmentation, the limbs are
manipulated as kinematic chains until the contours are best
matching the reference shape with error evaluated with a
distance map.
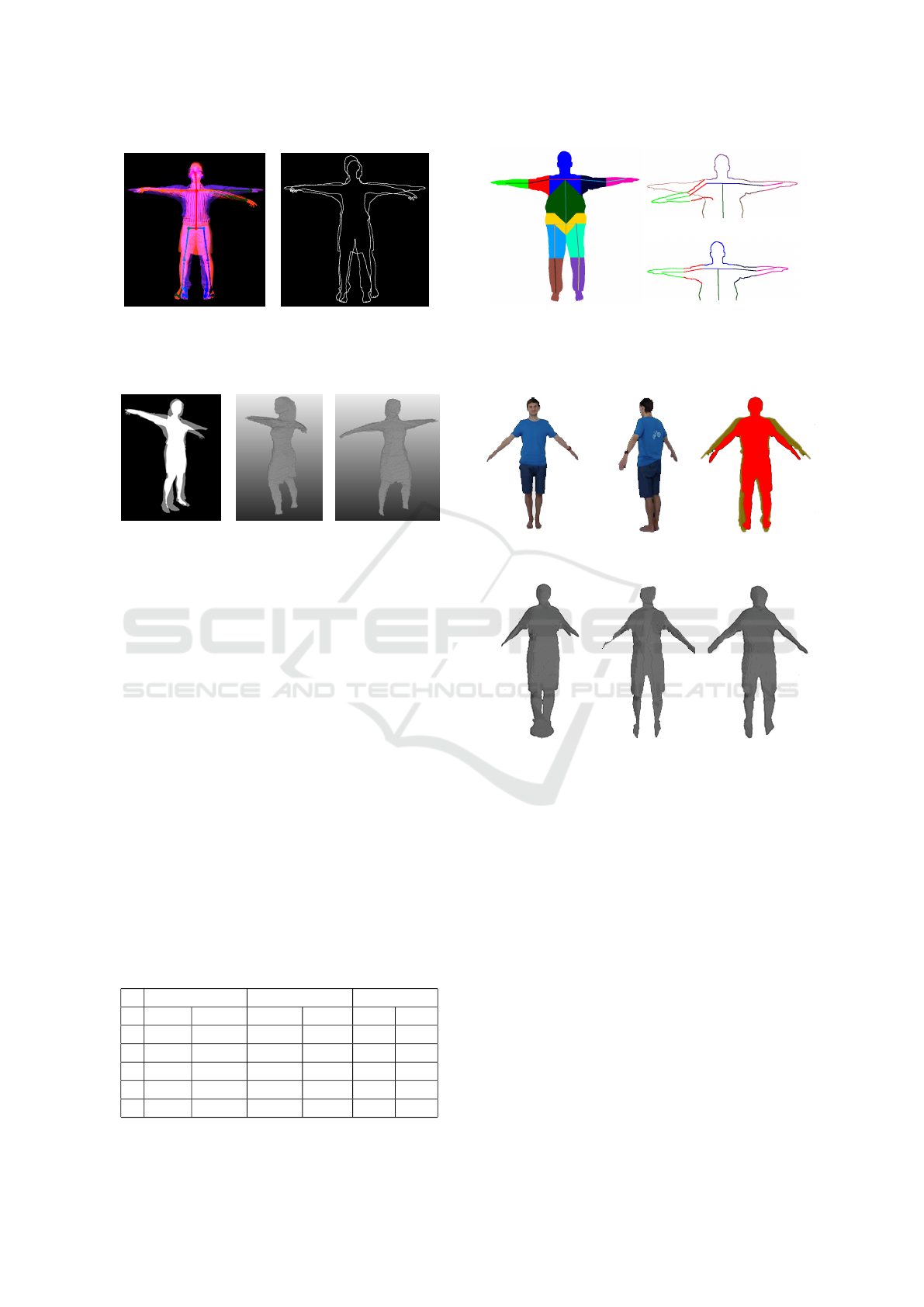
(a)
(b) (c)
(d) (e) (f)
Figure 12: After aligning a real-world human being (a-
c), the reconstruction results without alignment (d) are im-
proved (e). In case of applying registration (f), the limb
proportions are finally correct.
5.5 3D Silhouette Reconstruction from
Aligned and Registered Contours
The proposed alignment steps allow for normalizing
the person’s silhouette based on the input images of
varying orientation and enable 3D reconstruction of
a rotating human body from n = 8 equidistant views.
While rotating on-spot without post-processing is in-
sufficient due to inner body movements, see Fig-
ure 12, after alignment and additional registration all
body limbs are preserved and well proportioned. In
case of thin limbs, the refinement step can lead to
additional robustness regarding interaction between
alignment and subsequent registration.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
290

Results prove, that registration is the key process
in the pre-processing pipeline, see Figure 10 for un-
aligned but yet auto-registered contours.
6 CONCLUSION AND OUTLOOK
In this research work, a multi-step alignment process
is presented to harmonize human body pose acquired
during on-spot rotation in A- or T-pose w.r.t. a CGI
rendered reference avatar. The shift in position, inner
body movements, as well as inaccuracies of Open-
Pose can be compensated that way allowing for sil-
houette reconstruction from multiple views. While
the ARAP transformation enables the body skeleton’s
alignment to a reference model keeping the source
proportions, the registration process corrects the lo-
cal position’s mismatch and orientation from inaccu-
racies in OpenPose derived body key-points. Open-
Pose allows for good quality in orientations and views
incorporated in the DL process but lacks precision in
unusual orientations. Thus, the body with the skeleton
points must be first registered against the CGI render-
ing silhouette to support reliable anchor positions.
This alignment pipeline is an innovation for mov-
ing and elastic objects. As well, this represents an
innovation in 3D human reconstruction from monoc-
ular camera systems as no depth information is dis-
pensable and no high-level statistical shape model of
the human body is required. Instead, a priori knowl-
edge of the human body is kept tight and the specific
anatomical variability is preserved.
Currently the CGI renderings can be used in a
quite generic way, i.e. male reference template suc-
cessfully applied for female person or solid level of
robustness w.r.t. body mass index. Nevertheless,
the subsequent 3D reconstruction can be utilized to
derive orientation-specific templates by perspective
back-projecting from 3D to 2D after reconstruction
of front (0
◦
) and side view (90
◦
) only. This way, the
demand for realistic CGI avatars somehow roughly
matching the body shape to be reconstructed can be
conquered in future leading to more robustness.
A natural progression of this work is to incor-
porate DL models for object segmentation. This
additional knowledge enriches the anthropomorphic
model, such as the thickness of limbs, and could im-
prove the GrabCut segmentation algorithm.
Another future development addresses the enrich-
ment of the 3D silhouette reconstruction with depth
data either derived from depth sensors of the cam-
era device or DL based estimation of relative depth
(Freller et al., 2020) for aesthetic reasons. First re-
sults prove that incorporating this additional depth
information allows to further shift from the visual
hull to the actual body hull. While these improve-
ments do not necessarily affect accuracy of the body
sizing measurements, they feature realism of the 3D
model visualizations from an immersion point of
view. Follow-ups to this work, will focus on 3D re-
construction with aesthetic enrichment and body mea-
surement sizing from reconstructed 3D model.
ACKNOWLEDGEMENTS
This research is initiated by AMB Technology
GmbH together with the University of Applied
Sciences Upper Austria through project TrueSize
S.M.B.S. 21650377 with basic funding program num-
ber 872105, sponsored by the Austrian Research Pro-
motion Agency FFG, fed by research budget of the
Federal Republic of Austria. Contact: Anna Maria
Brunnhofer, CEO.
REFERENCES
Aguilar, W. G., Luna, M. A., Moya, J. F., Abad, V., Parra,
H., and Ruiz, H. (2017). Pedestrian detection for
uavs using cascade classifiers with meanshift. In 2017
IEEE 11th Int. Conf. on Semantic Computing (ICSC).
Bastioni, M., Re, S., and Misra, S. (2008). Ideas and meth-
ods for modeling 3d human figures: The principal al-
gorithms used by makehuman and their implementa-
tion in a new approach to parametric modeling. In
Proc. of the 1st Bangalore Annual Compute Conf.
Baumgartner, D., Praschl, C., Zucali, T., and Zwettler, G. A.
(2020). Hybrid approach for orientation-estimation of
rotating humans in video frames acquired by station-
ary monocular camera. In Proc. of the WSCG 2020.
Bradski, G. (2000). The OpenCV Library. Dr. Dobb’s Jour-
nal of Software Tools.
Cao, Z., Hidalgo Martinez, G., Simon, T., Wei, S., and
Sheikh, Y. A. (2019). Openpose: Realtime multi-
person 2d pose estimation using part affinity fields.
IEEE Trans. on PAMI.
Carass, A., Roy, S., Gherman, A., Reinhold, J. C., Jesson,
A., Arbel, T., Maier, O., Handels, H., Ghafoorian, M.,
Platel, B., et al. (2020). Evaluating white matter le-
sion segmentations with refined sørensen-dice analy-
sis. Scientific Reports, 10(1):1–19.
Chew, L. P. (1989). Constrained delaunay triangulations.
Algorithmica, 4(1-4):97–108.
Cootes, T. F., Taylor, C. J., Cooper, D. H., and Graham,
J. (1995). Active shape models - their training and
application. Comp. Vision and Image Underst., 61(1).
Douglas, D. H. and Peucker, T. K. (1973). Algorithms for
the reduction of the number of points required to rep-
resent a digitized line or its caricature. Cartographica,
10(2):112–122.
Three-step Alignment Approach for Fitting a Normalized Mask of a Person Rotating in A-Pose or T-Pose Essential for 3D Reconstruction
based on 2D Images and CGI Derived Reference Target Pose
291

Fang, H.-S., Lu, G., Fang, X., Xie, J., Tai, Y.-W., and Lu,
C. (2018). Weakly and semi supervised human body
part parsing via pose-guided knowledge transfer. In
Proceedings of the IEEE CVPR.
Fit3D (2020). Ein ber
¨
uhrungsloses erlebnis mit 3d-
k
¨
orperscans.
Freller, A., Turk, D., and Zwettler, G. A. (2020). Using deep
learning for depth estimation and 3d reconstruction of
humans. In Proc. of the 32nd European Modeling and
Simulation Symposium, Vienna, Austria.
Heindl, C., Bauer, H., Ankerl, M., and Pichler, A. (2015).
Reconstructme sdk: a c api for real-time 3d scanning.
In Proc. of the 6th Int. Conf. on 3D Body Scanning
Technologies, Switzerland.
Hidalgo, G. and Fujisaka, Y. (2019). Pose output format
(body 25).
Jacobson, A., Panozzo, D., et al. (2018). li-
bigl: A simple C++ geometry processing library.
https://libigl.github.io/.
Kocabas, M., Athanasiou, N., and Black, M. J. (2019).
Vibe: Video inference for human body pose and shape
estimation.
Lassner, C., Romero, J., Kiefel, M., Bogo, F., Black, M. J.,
and Gehler, P. V. (2017). Unite the people: Closing
the loop between 3d and 2d human representations.
Li, X., Li, H., Joo, H., Liu, Y., and Sheikh, Y. (2018). Struc-
ture from recurrent motion: From rigidity to recur-
rency.
Lin, H. and Wu, J. (2008). 3d reconstruction by combining
shape from silhouette with stereo. In 2008 19th Int.
Conf. on Pattern Recognition, pages 1–4.
Liu, H., Xu, T., and Wang, X. (2013). Related hog features
for human detection using cascaded adaboost and svm
classifiers. Lecture Notes in Computer Science book
series, 7733.
Liu, T. and Stathaki, T. (2017). Enhanced pedestrian detec-
tion using deep learning based semantic image seg-
mentation. In 2017 22nd Int. Conf. on Digital Signal
Processing (DSP), pages 1–5.
Marchal, G. and Lygren, T. (2017). The microsoft kinect:
validation of a robust and low-cost 3d scanner for bi-
ological science.
Mazareanu, E. R. (2020). statista: Re-
turn deliveries - costs in u.s. 2017-2020.
https://www.statista.com/statistics/871365/reverse-
logistics-cost-united-states, last visited 2020-07-29.
Merkel, D. (2014). Docker: Lightweight linux containers
for consistent development and deployment. Linux J.,
2014(239).
Mulayim, A., Yılmaz, U., and Atalay, M. V. (2003).
Silhouette-based 3-d model reconstruction from mul-
tiple images. IEEE transactions on systems, man, and
cybernetics. Part B, Cybernetics, 33:582–91.
Murphy, T. (2020). Improve conversion rates with your re-
turns policy. https://www.hiplee.com/blog/improve-
conversion-rates-with-your-returns-policy/, last vis-
ited 2020-07-29.
Orendorfff, A. (2019). The plague of ecommerce
return rates and how to maintain profitability.
https://www.shopify.com/enterprise/ecommerce-
returns, last visited 2020-07-29.
Pishchulin, L., Wuhrer, S., Helten, T., Theobalt, C., and
Schiele, B. (2017). Building statistical shape spaces
for 3d human modeling. Pattern Recognition, 67.
Pointner, A., Krauss, O., Freilinger, G., Strieder, D., and
Zwettler, G. A. (2018). Model-based image process-
ing approaches for automated person identification
and authentication in online banking. In Proc. of the
EMSS2018.
Ritter, F., Boskamp, T., Homeyer, A., Laue, H., Schwier,
M., Link, F., and Peitgen, H. . (2011). Medical image
analysis. IEEE Pulse, 2(6):60–70.
Rother, C., Kolmogorov, V., and Blake, A. (2004). ” grab-
cut” interactive foreground extraction using iterated
graph cuts. ACM transactions on graphics (TOG),
23(3):309–314.
Seitz, S. M. and Dyer, C. R. (1999). Photorealistic scene
reconstruction by voxel coloring. Int. Journal of Com-
puter Vision, 35:151–173.
Sizestream (2020). Best-in-class accuracy and speed in a
commercial 3d body scanner customizable platform.
Song, Z., Yu, J., Zhou, C., Tao, D., and Xie, Y. (2013).
Skeleton correspondence construction and its appli-
cations in animation style reusing. Neurocomputing,
120:461 – 468.
Sorkine, O. and Alexa, M. (2007). As-rigid-as-possible sur-
face modeling. In Symposium on Geometry process-
ing, volume 4, pages 109–116.
Statista (2012). Share of online orders that were returned in
2012 (by product category). [Online; accessed August
9, 2020].
Suzuki, S. et al. (1985). Topological structural analy-
sis of digitized binary images by border following.
Computer vision, graphics, and image processing,
30(1):32–46.
Varol, G., Romero, J., Martin, X., Mahmood, N., Black,
M. J., Laptev, I., and Schmid, C. (2017). Learning
from synthetic humans. CoRR, abs/1701.01370.
Wei, G., Lan, C., Zeng, W., and Chen, Z. (2019). View
invariant 3d human pose estimation. CoRR.
Xiang, Y., Schmidt, T., Narayanan, V., and Fox, D. (2017).
Posecnn: A convolutional neural network for 6d
object pose estimation in cluttered scenes. CoRR,
abs/1711.00199.
Yu, Y., Makihara, Y., and Yagi, Y. (2019). Pedestrian
segmentation based on a spatio-temporally consistent
graph-cut with optimal transport. IPSJ Transactions
on Computer Vision and Applications, 11.
Zatsiorsky, V. (1998). Kinematics of human motion. Amer-
ican Journal of Human Biology, 10.
Zeng, D., Chen, X., Zhu, M., Goesele, M., and Kuijper,
A. (2018). Background subtraction with real-time se-
mantic segmentation.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
292
