
Simulation Framework to Train Intelligent Agents towards an Assisted
Driving Power Wheelchair for People with Disability
Giovanni Falzone, Gianluca Giuffrida
a
, Silvia Panicacci
b
, Massimiliano Donati
c
and Luca Fanucci
d
Dept. of Information Engineering, University of Pisa, Via G. Caruso 16, 56122, Pisa, Italy
luca.fanucci}@unipi.it
Keywords:
Multi-Agent System, Simulation Framework, Reinforcement Learning, Assistive Technology, Power
Wheelchair, Assisted Driving.
Abstract:
Several million people with disabilities exploit power wheelchairs for outdoor mobility on both sidewalks
and cycling paths. Especially those with upper limb motor impairments have difficulty reacting quickly
to obstacles along the way, creating dangerous situations, such as wheelchair crash or rollover. A possible
solution could be to equip the power wheelchair with a neural network-based assisted driving system, able to
detect, avoid or warn the users of obstacles. Therefore, a virtual environment is required to simulate the system
and then test different neural network architectures before mounting the best performing one directly on board.
In this work, we present a simulation framework to train multiple artificial intelligent agents in parallel, by
means of reinforcement learning algorithms. The agent shall follow the user’s will and identify obstacles along
the path, taking the control of the power wheelchair when the user is making a dangerous driving choice. The
developed framework, adapted from an existing autonomous driving simulator, has been used to train and test
multiple intelligent agents simultaneously, thanks to a customised synchronisation and memory management
mechanism, reducing the overall training time. Preliminary results highlight the suitability of the adapted
framework for multiple agent development in the assisted driving scenario.
1 INTRODUCTION
In the recent years, more and more interest has been
directed to the world of assistive technology, in order
to help people with disabilities in their everyday
life. Power wheelchairs, voice recognition programs,
screen readers, prosthetic and robots are only some
examples of assistive devices (US Department of
Health and Human Services, 2018; Giuffrida et al.,
2019).
Considering physical disabilities, they refer to
impairments of parts of the body, resulting in some
limitations in mobility (GPII DeveloperSpace, 2020).
Approximately 13% of the U.S. population, among
adults aged 18 and over, reported having physical
disability in 2013 (Courtney-Long et al., 2015), with
a similar prevalence in other industrialised countries
a
https://orcid.org/0000-0003-3306-5698
b
https://orcid.org/0000-0003-2628-4382
c
https://orcid.org/0000-0002-6063-7180
d
https://orcid.org/0000-0001-5426-4974
and over the years.
Power wheelchairs are surely the most significant
example of assistive devices for mobility-impaired
people. They are wheelchairs with an electric motor
rather than manual power and they are usually driven
by the user with a joystick. Therefore, they provide a
greater degree of freedom. However, they rely heavily
on the users’ skills, which may not be sufficient to
react quickly to dangerous situations, such as the
presence of static and dynamic obstacles, roadblocks
and other impediments.
Some research teams have tried to overcome
collision and obstacle avoidance problems for power
wheelchairs, exploiting autonomous driving tools
and using different sensors (e.g. self localisation
algorithm, on-board lidar, stereoscopic camera and
spherical camera) (Leaman and La, 2017; Nguyen
et al., 2013a; Nguyen et al., 2013b).
The idea of this project is to realise a smart
wheelchair with assisted driving: it should allow the
user to drive with confidence during its daily life,
through obstacles (both static and dynamic), and, at
Falzone, G., Giuffrida, G., Panicacci, S., Donati, M. and Fanucci, L.
Simulation Framework to Train Intelligent Agents towards an Assisted Driving Power Wheelchair for People with Disability.
DOI: 10.5220/0010190301890196
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 1, pages 189-196
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
189

the same time, let the user control the wheelchair
whenever it will not end up in a dangerous situation.
The user is then able to drive himself, but a request
of intervention could be raised to the autonomous
driving module, elevating the autonomous driving
system to a supervisor role. Since a power wheelchair
speed is generally limited at 10km/h, the sensors
to mount fall in the short and medium range
category. Moreover, due to high cost and high
power consumption, the lidar technology (Rasshofer
and Gresser, 2005) becomes unfeasible for a smart
wheelchair. The selected sensors are then high
resolution RGB and depth cameras (Yin and Shi,
2018), together with accelerometers, gyroscopes and
tilt sensors. Obstacles can be detected using semantic
segmentation of RGB images (Dai et al., 2016). An
artificial intelligent agent based on Reinforcement
Learning (RL) allows to detect harmful situations and
control the vehicle (Caltagirone et al., 2017; Lillicrap
et al., 2015), taking in input segmentation and
depth images and the other sensors measurements.
However, RL algorithms should be trained and tested
in virtual environments and then, once the agent has
learned, moved into the real world. But the existing
simulators for wheelchairs are usually designed to
train people in driving a power wheelchair (Pinheiro
et al., 2016; Faria et al., 2014; Pithon et al., 2009),
not to train intelligent agents, and so they focus on the
user interface more than on the scalable architecture
(Sch
¨
oner, 2018).
In this paper, we present a simulation framework
for assisted driving on power wheelchair to train
multiple synchronised intelligent agents in parallel. It
allows to test different neural networks (NNs) while
reducing training time. At the end of the training
phase, the best performing agent will be mounted on-
board the power wheelchair.
After this introduction, Section II describes
the software framework, highlighting the chosen
simulator and its adaptation for multiple agents
parallel training and for the power wheelchair
use case. Reinforcement learning algorithms are
discussed in Section III, while Section IV presents
the preliminary results. Finally, the conclusions are
drawn in Section V.
2 SOFTWARE FRAMEWORK
In order to realise an assisted driving power
wheelchair, a decisional NN trained by a RL
algorithm has been chosen to implement obstacles
avoidance in dangerous situations. Hence, before
mounting it on a prototype, an interactive simulator
has been selected and improved for:
• training multiple artificial intelligent agents;
• testing multiple artificial intelligent agents;
• supporting the dynamic of a power wheelchair;
• generating dedicated sensors;
• generating multiple and dynamic environments;
• synchronising the simulated environment w.r.t.
the sensors dynamics and power wheelchairs.
The entire system exploits a client-server architecture
with synchronous remote procedure calls (RPC)
from each Client to the Server Simulator. It is
organised on different levels of abstraction in order
to decouple both the operations of interaction with
the simulator and of management of the NNs.
Figure 1 reports an overview of the entire software
architecture, separating the three main components:
the Server Simulator, the Manager and the Agent. The
latter two compose the Client entity, which directly
communicates with the Server Simulator.
The system is designed to be scalable and
modular, allowing to run multiple Agents with
different NN implementations at the same time with a
single Server Simulator.
2.1 Server Simulator
The Server Simulator module should implement a
roadside environment in several cities, some of them
to be used for training and others for testing. It should
also provide a variety of vehicles and sensors and the
possibility to change the position of a sensor with
respect to the vehicle itself. Moreover, all the sensors
should be configurable with respect to the range of
action, the field of view, the Signal to Noise Ratio
(SNR), etc. For these constraints, we selected the
autonomous driving simulator CARLA.
CARLA (Dosovitskiy et al., 2017) is an open-
source autonomous driving simulator used in research
to develop and evaluate autonomous agents for
automotive system. It is implemented as a layer
on top of Unreal Engine 4 (UE4) (Epic Games,
2019), which exploits NVIDIA PhysX to simulate the
physics of the environment with particular attention
to the vehicle characteristics, such as mass, dumping
factor, friction of the wheel, moment of inertia, etc.
The simulated maps focus on the urban
environment: there are many different maps
with different urban objects whose aim is to simulate
a variegate real city scenario. Within the simulator, it
is possible to configure different actors, represented
by pedestrians (e.g. children and adults, women and
men), and dynamic objects, mainly represented by
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
190
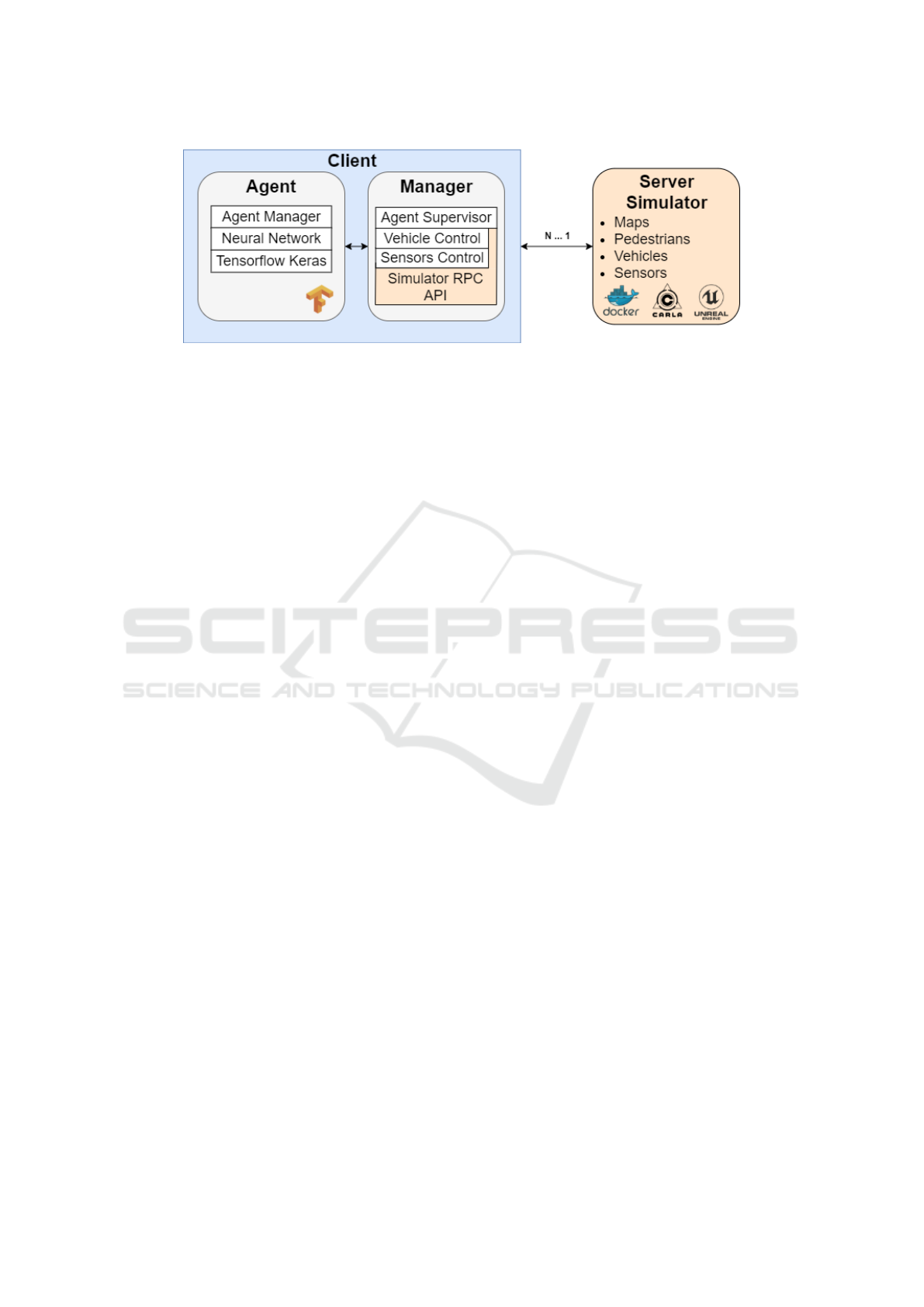
Figure 1: System architecture.
cars, trucks, motorbikes and bikes. The dynamic
objects follow the road rules, stopping to the
semaphore or waiting for people to cross the street.
The sensors available within the simulation cover
the most used ones in the autonomous driving world:
RGB camera, depth camera, radar, lidar, GPS and
Inertial Measurement Unit (IMU). Moreover, the
simulator provides the semantic segmentation of the
RGB camera and the collision sensors that detects all
the hits suffered by the vehicle.
The Server Simulator exposes the RPC APIs,
becoming a stand-alone component, running on top
of a docker container (Merkel, 2014): it gives to the
Manager the control of the simulation environment,
monitoring its parameters and the actors in the
simulated world. In this way, the Manager can
decouple the Server Simulator from the autonomous
Agent which implements the decision component.
However, CARLA is confined in the simulation
of automotive vehicles with the standard interface
composed by steering, throttle and brake. We can
adapt CARLA for the simulation of a different type of
vehicle, modifying the control of the car, so that it acts
as a power wheelchair. We have simulated the power
wheelchair with a BMW Isetta, since it is small and it
has a shape similar to a bounding box. The controllers
needed to set the accelerations and the velocities of
the centre of mass of the car itself are in charge of the
Manager.
2.2 Client Overview
The Client represents a simulated power wheelchair,
which interacts with the Server Simulator and
controls the environment and the vehicle through the
Manager, together with the Agent which implements
the decisional NN. More Clients can run during the
same simulation (on a single server), allowing the
parallelisation of the Agents training.
More in detail, the Manager exploits the simulator
RPC APIs to control a car to move with the dynamics
of a power wheelchair, which uses a joystick as user
interface. In fact, the joystick controls directly the
torque of the two DC motors and maps its position
in the desired linear and angular velocity. The
linear velocity is first limited and adjusted with two
Proportional-Integrative (PI) controllers, by acting
on the throttle and the brake, and finally set in
the simulator. In this way, we can avoid peaks
of acceleration, which could bring to simulation
inconsistencies. Instead, the angular velocity is
directly set in the simulator through RPC.
The Agent takes decisions on moving the joystick,
as a consequence of the observed state, which is
provided by the Manager. The observed state is
defined as the position, the speed, the direction of
the simulated power wheelchair, the input joystick,
which expresses the user’s will, and the environment
configuration (i.e. the sensors measurements)
inside the Server Simulator, in a given moment of
simulation.
The sensors mounted on the simulated wheelchair
are the RGB and Depth camera and 3 axes
accelerometer, gyroscope and tilt sensor.
Then, the NN inputs are the semantic
segmentation derived from the RGB image, the
depth image, the acceleration on x, y and z axes, the
roll and pitch angles and the input joystick position.
The yaw and the gyroscope values are available, but
we have decided not to use them as input for the NN.
The Agent decision (i.e. the output of decisional
NN) is a discreet joystick position chosen from all
possible user’s joystick outputs (red dots of Figure
2). For our purpose, the NN has to learn to follow
the will of the user whenever it represents a safe
option. Instead, when the Agent predicts an imminent
collision or a harmful situation, the user choice must
be bypassed and the Agent has to act as supervisor
avoiding the dangerous state but trying to follow the
user’s will as much as possible.
Therefore, the Agent has to minimise the error
between the chosen action and the user’s will. This
Simulation Framework to Train Intelligent Agents towards an Assisted Driving Power Wheelchair for People with Disability
191
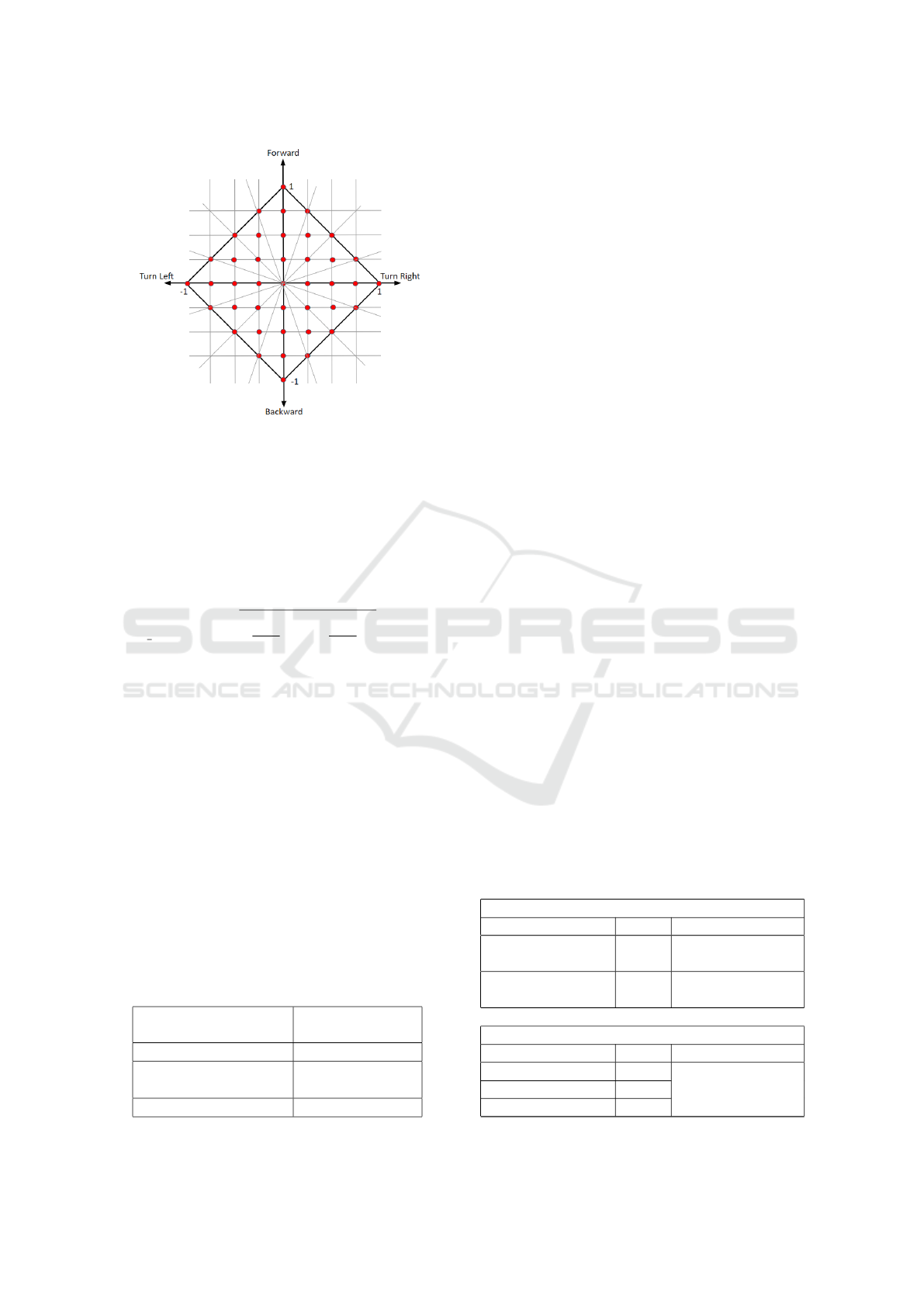
Figure 2: Continuous user and discretised Agent joysticks.
error is the euclidean distance between the input
joystick and the output joystick, and it represents
the first Key Performance Indicator (KPI), measuring
how the agent learns to follow the user’s will. The
maximum acceptable value is 0.1768, which happens
when the user’s joystick lies in the centre of the square
with base 0.25 (the step between two red dots in
Figure 2), according to the following equation:
max distance =
s
0.25
2
2
+
0.25
2
2
= 0.1768
(1)
The ability of the Agent to avoid an obstacle or in
general a harmful state is measured by counting the
number of steps in which the Agent is alive. Each
time the Agent dies, a new episode starts. The Agent
dies both for crashing with obstacles and if it has
reached the maximum number of steps (10, 000). For
this reason, the second KPI is the length of each
episode, which is equal to 10,000 in the best case.
The two KPIs must be evaluated jointly, since the
Agent has to follow the user’s will except in case,
following it, the Agent would end up in a crash.
2.3 Agent Supervisor
The Agent Supervisor module is inside the Manager
and implements the interface used by the Agent. It
Table 1: Penalty ranges.
Sensor
Penalty window
(absolute values)
Joysticks’ distance [0.1768, 2]
Accelerometer (x, y, z)
[[20,40],[20,40],
[20,40]] m/s
2
Tilt sensor (roll, pitch) [[5,20],[20,30]] °
receives all the events and data coming from the
sensors in the Server Simulator and it hides all the
details of the simulation environment to the Agent,
which receives only the observed state. It also
computes the rewards and the punishments that the
Agent collects for doing a certain action and being in
a certain state.
Considering the task of calculating the score of
the Agent, the Supervisor gives a positive base reward
(+1) when the distance between the output joystick,
chosen by the Agent, and the input joystick is less
than the maximum accepted distance value (Equation
1). The Supervisor punishes the Agent every time
each sensed measurement falls in a range of non-
acceptable values, shown in Table 1. So, all the
absolute values between 0 and the minimum value of
the penalty range are accepted and do not generate
any reward or penalty, except for the joystick, for
which the base reward is received. Otherwise, if the
value of a sensor falls in its penalty range, this value
is normalised in the window [0, 1] (intensity) and
the punishment is given by multiplying the intensity
with the sensor penalty (−2). At last, when the
absolute value of a sensor is higher than the maximum
predefined value, the Agent receives the crash penalty
(−100). The Supervisor gives the same penalty to
the Agent also when a collision happens. The entire
mechanism of rewards and penalties is reported in
Table 2.
For each step of execution, the total score is
computed by summing the reward with any penalties.
2.4 Agent Memory Management
Since each Agent has to store the states during the
episode, a replay memory mechanism is required.
For NNs which exploit the time sequentiality
inside a fixed size batch input, the samples are
stored from the newest to the oldest in a fixed size
Table 2: Supervisor rewards and penalties.
Static rewards and penalties
Type Value Description
Base Reward +1
for a “zero”
joysticks’ distance
Crash Penalty -100
collision, rollover,
high accelerations
Dynamic penalties
Type Value Description
Joysticks’ distance -2
multiplied by the
event intensity
Accelerations -2
Angles -2
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
192
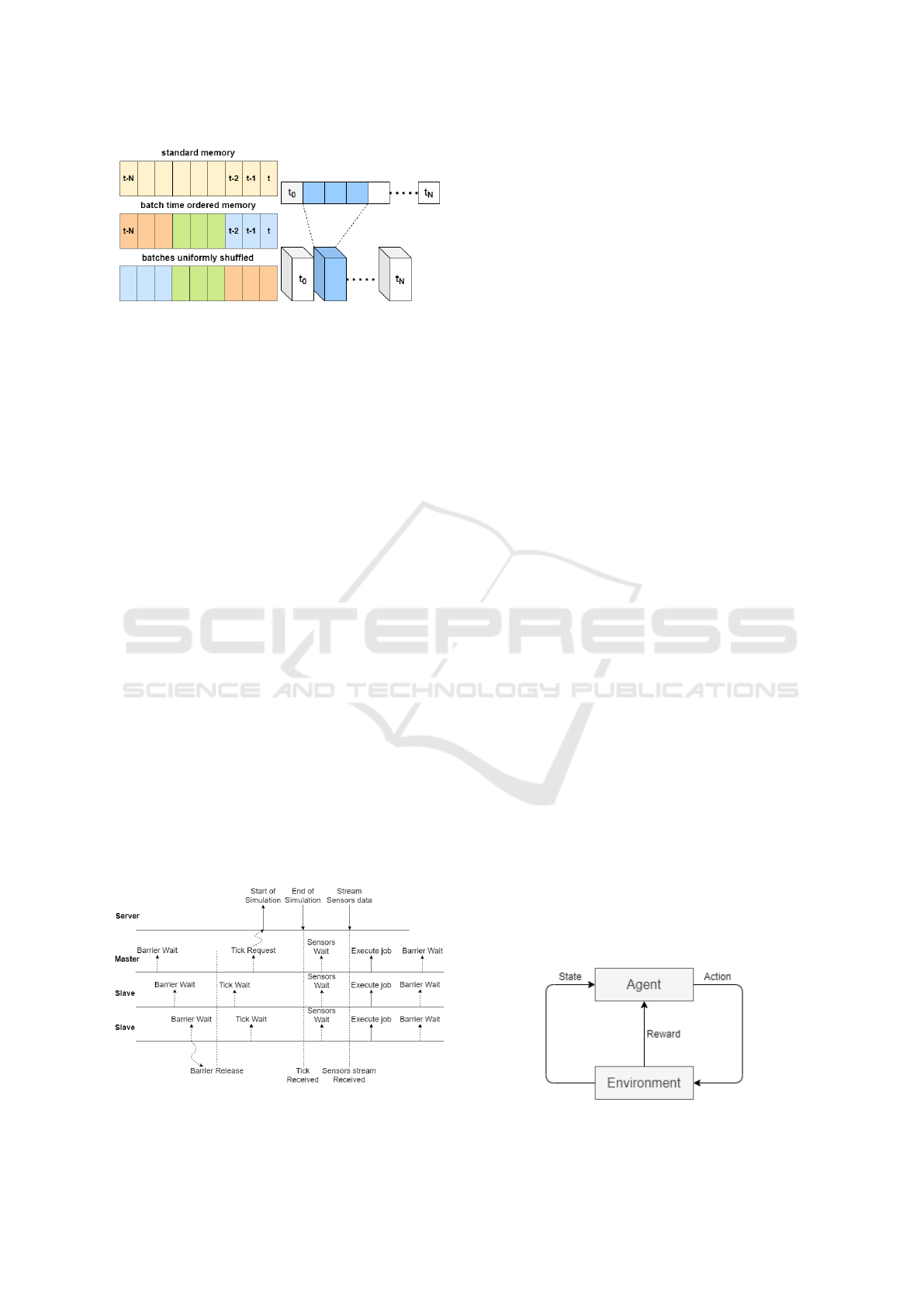
(a) (b)
Figure 3: Memory management: (a) grouped sequential
memory; (b) samples in another dimension.
First In First Out (FIFO) memory, they are grouped
maintaining sequentiality inside groups and, before
each training step, the groups are uniformly shuffled
(Figure 3a).
On the contrary, if the networks require the time
sequence as another input dimension, the standard
FIFO memory is navigated grouping the samples in
a new dimension (Figure 3b).
2.5 Clients Synchronisation
Since the Server Simulator is unique in the
entire system and the Clients can be multiple, a
synchronisation mechanism is required between each
Client and the Server and among the Clients.
One Client, the first that starts the simulation, acts
as master controlling the simulation, while the others
act as slaves. The simulation runs at the speed of the
Clients, but it is executed on the Server Simulator,
which sends a signal when the simulation step has
finished and streams sensors data.
Of course, the Clients go at different velocities,
also depending on the NN implemented in the Agent.
For this reason, before allowing the server to run
the simulation step, the master blocks on a barrier,
waiting for all the slaves, in order to avoid that some
slower Clients lose some steps. Once the barrier is
Figure 4: Synchronisation mechanism among clients and
server.
released, the master sends the request of simulation
to the Server (tick request), through the synchronous
RPC. At the same time, the slaves block on a mutex
associated with a condition (tick wait), waiting for the
end of simulation signal, sent by the Server when it
has finished to simulate the n-th snapshot of the world.
Then, all the Clients are released and block again on
a mutex with a condition (sensors wait), waiting to
receive the sensors data from the Server, avoiding
that too fast Clients miss those data after the end of
simulation signal.
Because of this synchronisation mechanism,
which is shown in Figure 4, all the Clients execute
each step in the same time, at the speed of the slowest,
even if NNs have different inference time.
3 REINFORCEMENT LEARNING
Reinforcement learning (Kaelbling et al., 1996)
is a machine learning paradigm which allows an
autonomous system to create a knowledge of the
environment in a game-like situation, exploiting trial
and error to come up with a solution to the given
problem. The designer sets the reward policy, but the
model does not take hints or suggestions for how to
solve the game.
The environment is usually described as a Markov
decision process in which the probability to take an
action in a particular state is given by the expected
reward (Figure 5).
In this work, we have used Deep Reinforcement
Learning (DRL) (Mnih et al., 2013; Lample and
Chaplot, 2016; Zhang and Du, 2019; Balaji et al.,
2019) to implement multiple Agents able to follow
the user’s will and avoid obstacles. The best
performing Agent will be mounted on-board the
power wheelchair, through a hardware accelerator.
The idea behind DRL is that the NN is trained
using a reward function, that is computed every time
it picks-up an action for the input state, with the aim
of generalising the environment. For each output of
the NN, a reward is given by the Agent Supervisor.
Hence, after thousands or millions of training steps,
Figure 5: Reinforcement Learning architecture.
Simulation Framework to Train Intelligent Agents towards an Assisted Driving Power Wheelchair for People with Disability
193
the NN learns which is the best action depending on
the given state. The aim of the Agent during the
training phase is to maximise the rewards received
while minimising the punishments.
In this problem, part of the input state (the input
joystick) indicates which is the correct action to take
in most of the possible states and so we know what
the Agent should learn. So, we can force the Agent
to learn this behaviour in a supervised way, speeding-
up the training of the NN (Action Driven Learning).
After the Agent has learnt how to choose actions for
the most environment states, we continue with the
ε − greedy RL using a low ε value (Agent Driven
Learning). The ε defines the probability to choose
a random action in the action space, instead of taking
the action chosen by the agent, combining exploration
and exploitation (Tokic, 2010).
Therefore, exploiting DRL (Mnih et al., 2013) or
Double Deep Q-Learning (Van Hasselt et al., 2015),
which solves the problem of overestimation of the
action values, we have trained multiple autonomous
Agents to move in an environment, respecting the
policy defined through the rewards and punishments.
3.1 Neural Network Architecture
With the framework described in Section 2, it could
be possible to train in parallel different NNs, varying
the type of layers, their size and order.
The Agent with the best performance should
be mounted on an embedded target platform; thus,
we have to find a compromise on the number of
parameters, layer typologies and memory footprint to
maintain a low impact on the hardware accelerator.
Moreover, the inference time of the NN has to be as
short as possible. In fact, it introduces a fixed delay
in the joystick control loop. If this delay is longer
than the users’ reaction time, they may feel out of
control of the vehicle. Therefore, we have empirically
decided that the maximum possible delay introduced
by the agent for our target users is 100ms.
In Table 3, the inputs of each NN are reported.
IMU refers to the acceleration on x, y and z axes and
the roll and pitch angles. All input values have been
normalised, to simplify the understanding by the NN.
Table 3: Neural network inputs.
Name Size Type
Depth Image 320x240x1 Float32
Semantic Segmentation
Image
320x240x3 Float32
IMU 5 Float32
User Joystick 2 Float32
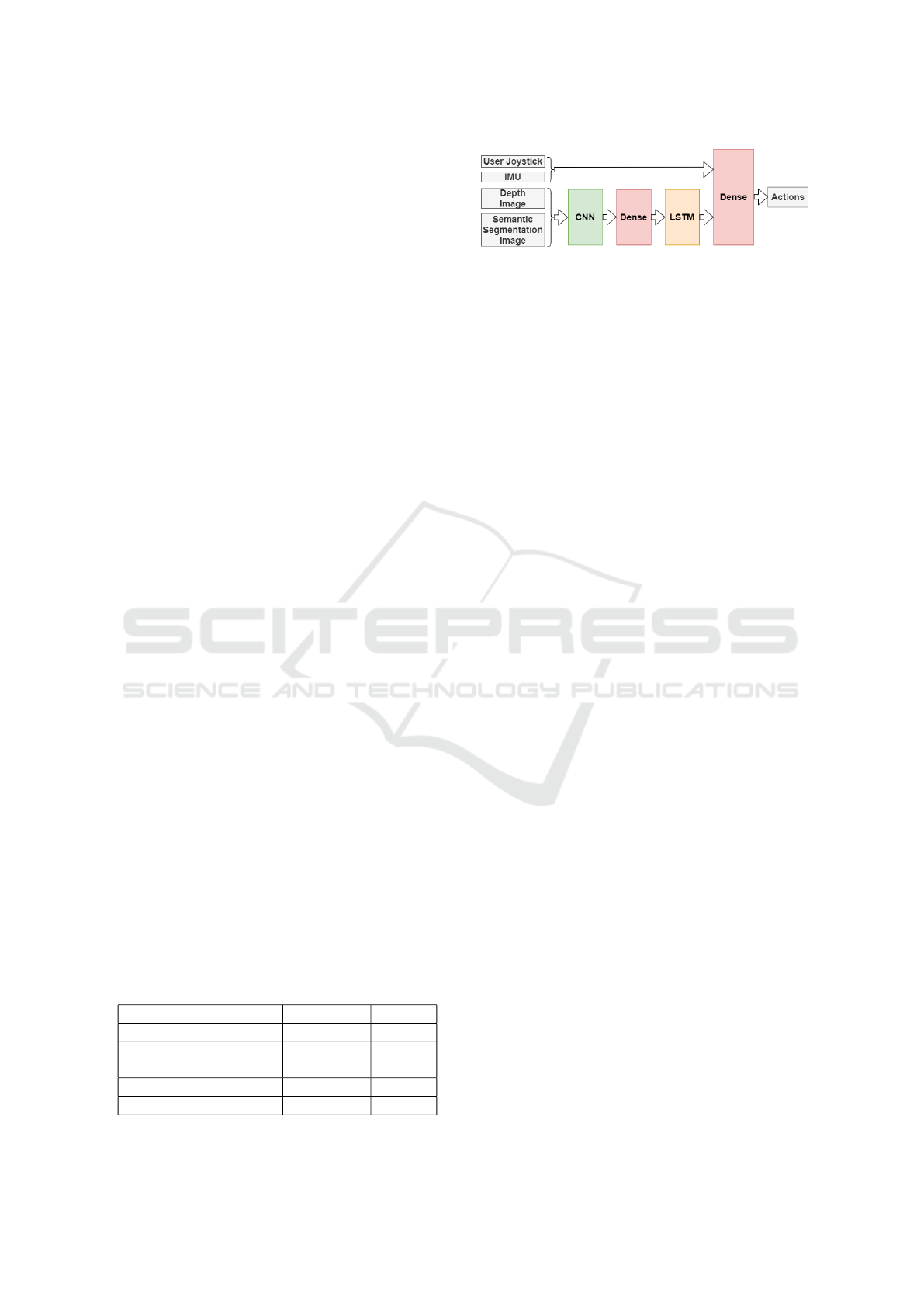
Figure 6: Neural network components overview.
In Figure 6, the most promising NN architecture is
reported. It is composed by three main components:
• the CNN block: it is a convolutional block which
receives the image taken as combination of the
semantic segmentation with the depth one;
• the Long Short Memory (LSTM) (Hochreiter and
Schmidhuber, 1997): it maintains the temporal
evolution of the images’ features through its
internal state;
• the Dense layer: it represents the voter of the NN
combining the user’s joystick and the other sensor
measurements with the output of the LSTM.
Some other NNs with different architecture and layers
have been trained and tested using this framework.
For example, a NN with a Convolutional-LSTM
(Shi et al., 2015), replacing the CNN block, has
been implemented and tested. However, it has been
discarded due to the high inference time which arrives
up to 1s.
4 RESULTS
The software framework described above has been
used to train multiple autonomous Agents able to
move in a city following the user’s will and avoiding
obstacles. The two training phases of each Agent are
described in Section 3.
The KPI used to evaluate the Action Driven
Learning phase, where the Agent is forced to follow
the user’s joystick, is the euclidean distance of the
two joysticks. Figure 7a reports the results of the
first phase of training for three different NNs. The
maximum acceptable error is reached in a short
number of training steps for all Agents. However,
the two NNs represented with blue and yellow lines
do not generalise well the policy for the entire first
phase. Thus, the Agent represented with the red line,
which implements the NN of Figure 6, was selected
for the second phase.
The goal of the Agent Driven Learning phase,
where the Agent controls the vehicle moving in
the simulated world trying to avoid collisions with
objects, is to maximise the length of the episode while
following the user’s joystick as much as possible.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
194

(a)
(b)
Figure 7: Results of the training: (a) joystick difference -
Action Driven Learning phase; (b) episodes length - Agent
Driven Learning phase.
Figure 7b reports preliminary results of the second
phase, showing the length of the episodes during
the training of the NN selected from the first phase
(Figure 6). The figure underlines how complex,
unstable and slow is the Agent Driven Learning
phase.
The simulation framework ran on a server with the
following specifications:
• AMD EPYC 7301 with 16-Core Processor;
• 256 GB of RAM;
• NVIDIA Tesla T4 with 16 GB of dedicated RAM.
During the preliminary Agent development, the
simulation framework showed the capability to train
as many networks together as supported by the
platform resources. In our case, we tested up to
6 Clients with the same Server Simulator. All the
Clients run on the same dedicated NVIDIA GPU
Docker, while the CARLA Server Simulator run on
a different GPU enabled dedicated Docker.
The synchronisation mechanism allows to train
networks with different inference times, maintaining
the coherence between two consecutive simulation
steps for all the Agents. Static and dynamic objects
have been introduced inside the simulated world, to
represent a scenario as much similar as possible to a
real one. Thanks to the fault recovery mechanism, the
simulator has been able to train multiple agents for
more than 600 hours.
5 CONCLUSIONS
People with physical disabilities are about 13% of
the U.S. population. Some of them are constrained
to use power wheelchairs, and they usually have
problems for outdoor mobility, on sidewalks or
cycling paths, because of the presence of multiple
obstacles and their slowness in reacting. In order to
overcome dangerous situations, such as crashes or
wheelchair rollover, the assistive technology sector
seeks to develop intelligent power wheelchairs that
can simplify and increase the autonomy of these
people. A simulator where training and testing
multiple neural network architectures is needed
before implementing artificial intelligence directly
on a real power wheelchair. However, if several
companies and research teams are investing on
frameworks for autonomous driving, few studies have
been done in the field of assisted driving for power
wheelchairs.
In this paper, we presented a simulation
framework to train multiple intelligent Agents for
assisted driving. The entire developed framework is
scalable and modular, since it is totally decoupled
from the client architectures. Each client represents a
power wheelchair moving in the simulated world and
implements a neural network based on reinforcement
learning, with the aim of following the user’s will
while avoiding harmful situations, such as collisions
and crashes. All the clients are synchronised with
a mechanism of barriers, mutexes and conditions,
so that coherence in the simulated world is always
maintained. Then, this simulation framework, which
comes from the autonomous driving world, allows us
to reduce the training time, thanks to parallelism, and
to find the neural network with the best performance
for assisted driving. In fact, in the simulation, the
vehicle is equipped with customised sensors and is
controlled as it acts as a power wheelchair (instead
of a car). Moreover, multiple static and dynamic
obstacles are injected in the simulated world, making
it as real as possible.
Preliminary results highlight the capability of the
adapted framework to train together many networks
for the assisted driving domain. Once selected the
best implementation in simulation, it is possible
to migrate the Agent in a real embedded platform
mounted on a power wheelchair.
Simulation Framework to Train Intelligent Agents towards an Assisted Driving Power Wheelchair for People with Disability
195

REFERENCES
Balaji, B., Mallya, S., Genc, S., Gupta, S., Dirac,
L., Khare, V., Roy, G., Sun, T., Tao, Y.,
Townsend, B., Calleja, E., and Muralidhara, S. (2019).
Deepracer: Educational autonomous racing platform
for experimentation with sim2real reinforcement
learning.
Caltagirone, L., Bellone, M., Svensson, L., and
Wahde, M. (2017). Lidar-based driving path
generation using fully convolutional neural networks.
IEEE International Conference on Intelligent
Transportation Systems 2017.
Courtney-Long, E., Carroll, D., Zhang, Q., Stevens, A.,
Griffin-Blake, S., Armour, B., and Campbell, V.
(2015). Prevalence of disability and disability type
among adults — united states, 2013. MMWR.
Morbidity and mortality weekly report, 64:777–783.
Dai, J., He, K., and Sun, J. (2016). Instance-aware semantic
segmentation via multi-task network cascades. In The
IEEE Conference on Computer Vision and Pattern
Recognition (CVPR).
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A.,
and Koltun, V. (2017). CARLA: An open urban
driving simulator. In Proceedings of the 1st Annual
Conference on Robot Learning, pages 1–16.
Epic Games (2019). Unreal engine. https://www.unreal
engine.com. [Online]; accessed August 2020.
Faria, B. M., Reis, L. P., and Lau, N. (2014). A survey
on intelligent wheelchair prototypes and simulators.
In Rocha,
´
A., Correia, A. M., Tan, F. . B., and
Stroetmann, K. . A., editors, New Perspectives
in Information Systems and Technologies, Volume
1, pages 545–557, Cham. Springer International
Publishing.
Giuffrida, G., Meoni, G., and Fanucci, L. (2019). A
yolov2 convolutional neural network-based human–
machine interface for the control of assistive robotic
manipulators. Applied Sciences, 9(11):2243.
GPII DeveloperSpace (2020). What is physical disability?
https://ds.gpii.net/content/ what-physical-disability.
[Online]; accessed August 2020.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural computation, 9(8):1735–1780.
Kaelbling, L. P., Littman, M. L., and Moore, A. W.
(1996). Reinforcement learning: A survey. Journal
of artificial intelligence research, 4:237–285.
Lample, G. and Chaplot, D. S. (2016). Playing fps
games with deep reinforcement learning. ArXiv,
abs/1609.05521.
Leaman, J. and La, H. M. (2017). A comprehensive
review of smart wheelchairs: Past, present, and
future. IEEE Transactions on Human-Machine
Systems, 47(4):486–499.
Lillicrap, T., Hunt, J., Pritzel, A., Heess, N., Erez, T., Tassa,
Y., Silver, D., and Wierstra, D. (2015). Continuous
control with deep reinforcement learning. CoRR.
Merkel, D. (2014). Docker: lightweight linux containers
for consistent development and deployment. Linux
journal, 2014(239):2.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M.
(2013). Playing atari with deep reinforcement
learning.
Nguyen, A. V., Nguyen, L. B., Su, S., and Nguyen, H. T.
(2013a). The advancement of an obstacle avoidance
bayesian neural network for an intelligent wheelchair.
In 2013 35th Annual International Conference of the
IEEE Engineering in Medicine and Biology Society
(EMBC), pages 3642–3645.
Nguyen, J. S., Su, S. W., and Nguyen, H. T. (2013b).
Experimental study on a smart wheelchair system
using a combination of stereoscopic and spherical
vision. In 2013 35th Annual International Conference
of the IEEE Engineering in Medicine and Biology
Society (EMBC), pages 4597–4600.
Pinheiro, O. R., Alves, L. R. G., Romero, M. F. M.,
and de Souza, J. R. (2016). Wheelchair simulator
game for training people with severe disabilities. In
2016 1st International Conference on Technology and
Innovation in Sports, Health and Wellbeing (TISHW),
pages 1–8.
Pithon, T., Weiss, T., Richir, S., and Klinger, E. (2009).
Wheelchair simulators: A review. Technology and
Disability, 21:1–10.
Rasshofer, R. H. and Gresser, K. (2005). Automotive radar
and lidar systems for next generation driver assistance
functions. Advances in Radio Science, 3.
Sch
¨
oner, H.-P. (2018). Simulation in development and
testing of autonomous vehicles. In Bargende, M.,
Reuss, H.-C., and Wiedemann, J., editors, 18.
Internationales Stuttgarter Symposium, pages 1083–
1095, Wiesbaden. Springer Fachmedien Wiesbaden.
Shi, X., Chen, Z., Wang, H., Yeung, D.-Y., Wong,
W. K., and WOO, W.-c. (2015). Convolutional
lstm network: A machine learning approach for
precipitation nowcasting.
Tokic, M. (2010). Adaptive ε-greedy exploration in
reinforcement learning based on value differences.
In Dillmann, R., Beyerer, J., Hanebeck, U. D.,
and Schultz, T., editors, KI 2010: Advances in
Artificial Intelligence, pages 203–210. Springer Berlin
Heidelberg.
US Department of Health and Human Services (2018).
What are some types of assistive devices and how
are they used? https://www.nichd.nih.gov/health/
topics/rehabtech/conditioninfo/device. [Online];
accessed August 2020.
Van Hasselt, H., Guez, A., and Silver, D. (2015). Deep
reinforcement learning with double q-learning.
Yin, Z. and Shi, J. (2018). Geonet: Unsupervised learning
of dense depth, optical flow and camera pose. In
Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 1983–1992.
Zhang, Q. and Du, T. (2019). Self-driving scale car trained
by deep reinforcement learning.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
196
