
RGB-D-based Human Detection and Segmentation for Mobile Robot
Navigation in Industrial Environments
Oguz Kedilioglu
1 a
, Markus Lieret
1 b
, Julia Schottenhamml
2 c
, Tobias W
¨
urfl
2 d
,
Andreas Blank
1 e
, Andreas Maier
2 f
and J
¨
org Franke
1 g
1
Institute for Factory Automation and Production Systems, Friedrich-Alexander-Universit
¨
at Erlangen-N
¨
urnberg (FAU),
91058 Erlangen, Germanyy
2
Pattern Recognition Lab, Friedrich-Alexander- Universit
¨
at Erlangen-N
¨
urnberg (FAU), 91058 Erlangen, Germany
Keywords:
Image Segmentation, Object Recognition, Neural Networks, Deep Learning, Robotics, Autonomous Mobile
Robots, Flexible Automation, Warehouse Automation.
Abstract:
Automated guided vehicles (AGV) are nowadays a common option for the efficient and automated in-house
transportation of various cargo and materials. By the additional application of unmanned aerial vehicles (UAV)
in the delivery and intralogistics sector this flow of materials is expected to be extended by the third dimension
within the next decade.
To ensure a collision-free movement for those vehicles optical, ultrasonic or capacitive distance sensors are
commonly employed. While such systems allow a collision-free navigation, they are not able to distinguish
humans from static objects and therefore require the robot to move at a human-safe speed at any time. To over-
come these limitations and allow an environment sensitive collision avoidance for UAVs and AGVs we provide
a solution for the depth camera based real-time semantic segmentation of workers in industrial environments.
The semantic segmentation is based on an adapted version of the deep convolutional neural network (CNN)
architecture FuseNet. After explaining the underlying methodology we present an automated approach for the
generation of weakly annotated training data and evaluate the performance of the trained model compared to
other well-known approaches.
1 INTRODUCTION
Within the last years collaborative robots and auto-
mated guided vehicles (AGV) found their way into
industrial automation. As they share the working
space with human workers, fencings become im-
practical and novel safeguarding technologies are re-
quired. While collaborative robots commonly provide
inherent safety features such as force and momentum
limitations or capacitive skins to detect approaching
objects, AGVs capture their environment based on op-
tical or ultrasonic sensors.
a
https://orcid.org/0000-0002-3916-805X
b
https://orcid.org/0000-0001-9585-0128
c
https://orcid.org/0000-0002-9145-9102
d
https://orcid.org/0000-0001-9086-0896
e
https://orcid.org/0000-0002-5904-9680
f
https://orcid.org/0000-0002-9550-5284
g
https://orcid.org/0000-0003-0700-2028
Those safeguarding technologies ensure a reliable
collision avoidance but are based on the detection
of any object within the robots working space. The
more expedient approach is the detection of humans
and an appropriate reaction of the robot based on the
humans’ movements and behaviour. Thereby non-
human objects only need to be considered for colli-
sion avoidance but no additional safety distance or
speed reduction is required when passing those ob-
jects. This applies also for the indoor navigation of
UAVs that will be deployed inside of industrial pro-
duction halls within the next decade.
To provide a next step to an environment-aware
robot navigation we present an approach for the real-
time human detection and segmentation in indus-
trial environments. Based on the humans’ three-
dimensional point cloud representation resulting from
the segmentation process an adaptive collision avoid-
ance behaviour can be achieved.
Kedilioglu, O., Lieret, M., Schottenhamml, J., Würfl, T., Blank, A., Maier, A. and Franke, J.
RGB-D-based Human Detection and Segmentation for Mobile Robot Navigation in Industrial Environments.
DOI: 10.5220/0010187702190226
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 4: VISAPP, pages
219-226
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
219

The paper is therefore structured as follows: Sec-
tion 2 presents related research and existing solutions
for the localization of human workers in industrial en-
vironments. Within section 3 we will dissociate our
approach from existing solutions and present the un-
derlying methodology and architecture. In section 4
we evaluate the reliability and accuracy of our ap-
proach and afterwards we discuss the results and out-
line the future research in section 5.
2 RELATED WORK
The reliable localization and tracking of humans for
mobile robot navigation has already been the subject
of various research projects and different approaches
have been presented. The most common strategy is
the equipment of workers with wireless transponders
or optical markers that can be tracked by the applica-
tion of suitable receivers and vision systems in com-
bination with feature detectors and deep learning ap-
proaches.
Koch et al. (Koch et al., 2007) propose a local-
ization method that relies solely on radio frequency
identification (RFID) technology. Therefore about
4000 passive RFID tags are installed in the floor of
a 60 m
2
test environment resulting in a grid density
of 12.5 cm. To determine its current position, a wire-
less RFID reader is attached to the top of the humans
foot. The resulting tracking accuracy is about 10 cm,
however no precise localization is possible when the
person walks too fast. Mosberger et al. (Mosberger
and Andreasson, 2013) proposed the usage of a mono-
camera system and reflective vests for human tracking
adapted to industrial environments. A flash attached
to the camera illuminates the scene and a Random
Forest classifier is used to detect the reflections of the
vests. Those reflections can be localized in 3D space
within an accuracy in the decimeter range and a max-
imum detection distance of 10 meters.
However, whenever the human worker is not
wearing his tracker or vest, he is not detectable by the
robot and therefore exposed to potential harm. There-
fore, different camera based solutions have been pre-
sented that allow a detection and pose determination
of humans without any additional safety clothing or
costly external sensor systems.
Munaro et al. (Munaro et al., 2015) present
different RGB-D based human tracking pipelines for
industrial environments. Using a combined method of
applied consistency constraints, HOG-like descriptors
and Haar-like feature extraction on disparity images
they achieved a human detection with a false negative
rate of 21.95 % and a false positives per frames
value of 0.17.
Different approaches focus on adaptive point
cloud filtering to detect humans. After the removal
of ground and ceiling plane the remaining objects
are segmented based on their depth values and fi-
nally classified using a poselet-based human detector.
Zhang et al. achieved the calculation of the human’s
bounding boxes at 7-15 frames per second with a false
negative rate of approx. 3 % and a false positive rate
of 2 %, based on the utilized dataset (Zhang et al.,
2013). Shotton et al. achieve promising results on
the real-time human pose recognition applied to sin-
gle depth images. Using randomized decision trees
and forests they reached a mean average precision of
0.731 on the locations of the individual body joints on
a dataset of only human depth data without additional
objects (Shotton et al., 2011).
Besides, it has also been shown that region of in-
terest algorithms or the combination of depth-based
shape detection, face and skin detection and mo-
tion estimation using reversible-jump Markov Chain
Monte Carlo filters allow a reliable tracking of hu-
mans and are applicable for mobile robots ((Jafari
et al., 2014), (Liu et al., 2015)).
While there are already many different approaches
for the vision based human detection available, they
commonly focus on the solely detection rather then
the actual and precise segmentation. This renders
them unsuitable for real-time navigation of mobile
robots, thus, they do not work well in real-world in-
dustrial environments. To overcome this limitations
we present in the following a real-time semantic seg-
mentation of humans in industrial environments that
is based on the convolutional neural network FuseNet.
We investigate if using an RGB-D based segmenta-
tion model rather then a model that only takes color or
depth information in account, improves segmentation
results in commonly unicolored and evenly structured
industrial environments.
3 RGB-D-BASED HUMAN
SEGMENTATION
Object recognition methods are divided into four
approaches. When the image is classified without
determining the position of the individual objects,
then the task is termed image classification. When the
position of the objects is determined with a bounding
box, then it corresponds to object detection. Se-
mantic segmentation models return a semantic mask
M
semantic
that assigns a semantic label, e.g. the label
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
220
’bottle’ to each pixel of the input image. The se-
mantic mask M
semantic
∈ L
H×W
semantic
with image height
H, image width W and semantic label-set L
semantic
=
{0, 1, ..., C} where C is the number of semantic cat-
egories, is a 2-dimensional array with the pixel val-
ues designating the semantic category a pixel be-
longs to. Background pixels are indicated by 0. In-
stance segmentation returns separate labels for differ-
ent instances of the same class. The instance mask
M
instance
= {M
i
∈ L
H×W
instance
|i = 1, ..., n} with instance
label-set L
instance
= {0, 1} and number of instances n,
is a set of 2-dimensional binary arrays M
i
where 0 de-
notes background pixels and 1 denotes object instance
pixels ((Garcia-Garcia et al., 2017)).
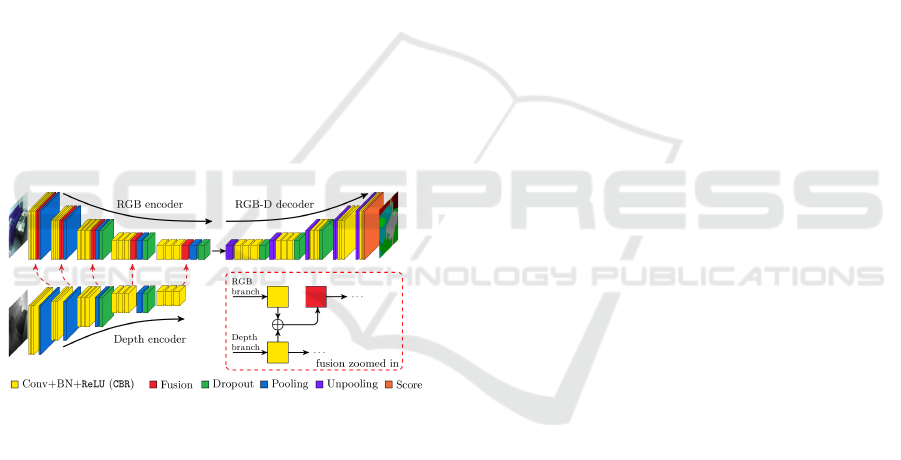
3.1 FuseNet Architecture
To achieve a reliable and fast 3D segmentation we in-
vestigate using FuseNet (Hazirbas et al., 2016), an
RGB-D semantic segmentation model that achieves
competitive results compared to the state-of-the-art
methods on the SUN RGB-D benchmark (Song et al.,
2015) with 37.29 % mIoU. It has an encoder-decoder
structure with two encoder branches (figure 1). One
branch extracts features from the RGB image and the
other one from the corresponding depth image.
Figure 1: FuseNet architecture representing the encoder-
decoder structure for RGB and depth images (figure adapted
from (Hazirbas et al., 2016)).
The feature maps from the depth branch are fused
into the feature maps of the RGB branch. This fusion
layer is implemented as an element-wise summation
of the two feature maps. The authors note that the
depth information helps the model with the segmen-
tation especially in cases where objects have similar
color properties.
They provide a PyTorch implementation of their
FuseNet architecture (Hazirbas et al., 2017), which
we use for our analysis. They also provide the weights
of their model that was pretrained with the NYU
RGBD dataset (Nathan Silberman and Fergus, 2012),
which consists of 1449 labeled RGBD images from
indoor scenes. The original NYU dataset has 894 dif-
ferent categories, but Hazirbas et al. use only 40 cate-
gories to train their model. To map the original labels
into 40 classes, they employ the mapping by (Gupta
et al., 2013).
To optimize the pretrained model for the reliable
segmentation of humans in industrial environments,
we train the model with a task-specific, weakly an-
notated data set. The corresponding data acquisition
process and the methodology used for the automated
annotation of the captured images and details on the
actual training process are presented in the following.
3.2 Data Acquisition
With an Intel RealSense D415 RGB-D camera around
20k images have been acquired. All images were
recorded within the laboratories of the FAPS institute
at the University of Erlangen-Nuremberg. It is filled
with production machines, robots, tools, tables etc.
Many small objects, buckets, boxes, shelves and ma-
chine parts help to simulate a challenging industrial
environment. The prevailing colors are gray, beige
and green, thus constituting a representative mixture
of colors. One side of the hall consists of windows
that are facing outside and covering more than half
of the wall. This facilitates good illumination thanks
to sunlight. But it has to be noted that this is not al-
ways the case in industrial environments. In order to
simulate a more representative illumination situation
the acquisition was realized in the morning and in the
afternoon.
Besides the environment, the motion of the cam-
era also plays an important role in determining the
quality of the images. Therefore the movement ve-
locities were varied and the camera motions com-
prise continuous steady paths as well as sideways
turning and tilting motions to generate a challenging
dataset. Fast motions lead to blurred images, which
are nonetheless kept in the dataset in order to exam-
ine the behavior of the segmentation algorithms with
difficult images. From scene to scene, the paths, the
starting positions and the motion styles are varied to
generate a diverse dataset. The resulting images are
split into 11 scenes, each with approximately 2000
images. Each scene represents a coherent set of im-
ages representing a short video snippet with a dura-
tion of about 1 minute.
3.3 Training Data Preparation
As the manual annotation of the images would imply
significant time investment and therefore is not expe-
dient we make use of the fact, that color and depth
image provided by the camera are aligned and of the
same resolution. We therefore use a Mask R-CNN
RGB-D-based Human Detection and Segmentation for Mobile Robot Navigation in Industrial Environments
221

model that is trained on the COCO dataset (Lin et al.,
2014) to calculate segmentation masks for the indi-
vidual humans that are solely based on the color im-
age and afterwards additionally assign those masks
to the depth image to generate the annotated RGB-D
data set. As Mask R-CNN works with instance masks
while FuseNet requires semantic masks, the masks
have to be adapted, before they can be used for the
training. Figure 2 shows an overview of the required
steps needed to start training FuseNet.
Instance masks from
weakly trained Mask R-CNN
Human-only
instance masks
Remove non-human
instance masks
Merge instance masks
Human-only
semantic masks
RGB image Depth image
RGB-D semantic
segmentation training data
FuseNet training
Crop and downsample
Data augmentation
Figure 2: Preprocessing steps for FuseNet training. The
weakly trained human only masks received from Mask R-
CNN are multiplied with the RGB and depth images to cre-
ate the required training data.
An instance mask M
instance
= {(M
i
, c
i
)|M
i
∈
L
H×W
binary
, L
binary
= {0, 1}, c
i
∈ L
semantic
= {0, 1, ..., C}}
has height H, width W , class c
i
of instance i repre-
sented by single-instance mask M
i
and total number
of classes C (0 corresponds to background). In our
case C = 80, because of the COCO dataset Mask R-
CNN was pretrained with.
As we only require a semantic class (’human’),
which means that L
semantic
= L
binary
we can extract
the human-only semantic mask M
semantic
by merging
all single-instance masks M
i
that represent the cate-
gory ’human’. The individual semantic segmentation
masks M
semantic
and the RGB-D images I
RGB−D
are
then converted from their original resolution to the
target resolution of 320×240 required by the FuseNet
implementation. To retain the target image ratio the
width of the original images and masks are cropped to
960 pixels before downsampling. This resizing of the
images is computed dynamically during runtime and
also includes a reshaping of the image’s array repre-
sentation to coincide with the Mask R-CNN imple-
mentation.
3.4 Data Augmentation
After the images and masks have been transformed
into the right format their number can be increased
by data augmentation methods. We apply two simple
data augmentation methods, left-right flip and lower
brightness to increase the model’s invariance w.r.t. the
location of humans in the image and disturbing ef-
fects in images. By applying different combinations
of the two data augmentation methods we can quadru-
ple the size of our dataset from 17,505 to 70,020 el-
ements. The four different combinations of the two
data augmentation methods, left-right flip and lower
brightness, are 1) original dataset, 2) only left-right
flip, 3) only lower brightness and 4) left-right flip and
lower brightness. These four versions of our dataset
are shuffled to create independent but identically dis-
tributed samples.
3.5 Training Details
In advance to the training process the PyTorch imple-
mentation has to be modified. The model originally
provides 40 output channels which would require
segmentation masks M
semantic
with 40 categories for
training. As our masks are binary we modified the last
layer of FuseNet to only keep the first of the 40 output
channels and to discard the remaining.
The total number of training samples is 70,020
and the total number of validation samples is 393.
For the validation dataset data augmentation is not
used. FuseNet uses VGG-16 (Simonyan and Zisser-
man, 2014) as backbone that was pretrained with the
ImageNet dataset (Deng et al., 2009).
The model’s output is a probability mask M
sigmoid
with continuous values between 0 and 1, but for the
localization of humans the output needs to be a bi-
nary mask M
semantic
. We therefore utilize hystere-
sis thresholding to maintain high confidence areas
in the mask and to suppress the noise of low confi-
dence pixels within these areas. We use the hystere-
sis thresholding implementation of the scikit-image
library (van der Walt et al., 2014) with a low-threshold
of 0.3 and a high-threshold of 0.7.
Overall, we trained FuseNet five times, each time with
different training hyper-parameters, but always start-
ing from the same initial NYU-pretrained model, re-
sulting in 5 different model versions. For all model
versions stochastic gradient descent is utilized as the
learning algorithm with momentum, weight decay
and learning rate decay. Table 1 lists all applied train-
ing hyper-parameters. The best results were achieved
with the parameter set used for model version 3 which
has a mean validation loss value of 0.041 and will
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
222
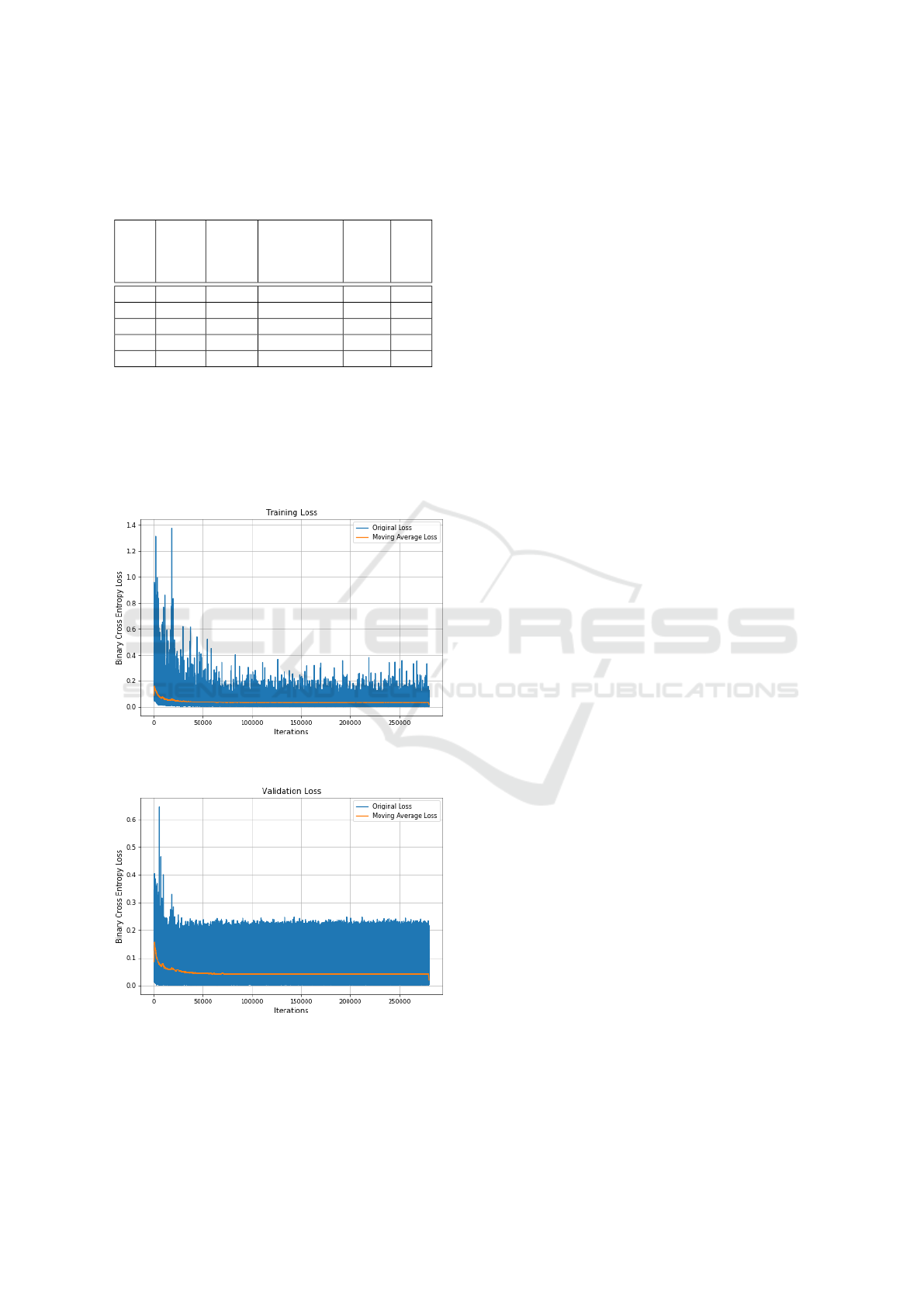
Table 1: FuseNet training hyper-parameters used for the dif-
ferent training versions. To achieve optimal results initial
learning rate, learning rate decay, frequency of learning rate
decay, epochs and batch size were evaluated.
Model
Ver-
sion
Initial
Learn-
ing
Rate
Learning
Rate
Decay
Frequency of
Learning Rate
Decay after
Epochs Batch
Size
1 0.001 0.9 10,000 iter. 3 1
2 0.001 0.5 10,000 iter. 7 2
3 0.01 0.6 10,000 iter. 8 2
4 0.1 0.5 10,000 iter. 7 2
5 0.001 0.5 50,000 iter. 7 2
therefore be used for the subsequent evaluation. Ver-
sion 4 has the worst performance with a mean valida-
tion loss of 0.071.
Figure 3 shows the training loss function as bi-
nary cross entropy (BCE) loss after the individual it-
erations while Figure 4 shows the corresponding val-
idation loss.
Figure 3: Loss of model version 3 on the training set after
each iteration.
Figure 4: Loss of model version 3 on the validation set after
each iteration.
Both training and validation loss decrease rapidly
at the beginning and settle at a constant value range
after approx. 50000 iterations. After approx. 100000
iterations the moving average loss for the training
reaches a constant value of 0.038 while the valida-
tion loss moving average stays constant at a value of
0.040.
3.6 3D Point Cloud Generation
The 3D localization of humans determines their
(x, y, z) position relative to the camera mounted on the
UAV or AGV. Thereby the human is represented by a
3D point cloud consisting of points that belong to hu-
mans which is created by combining the segmentation
mask and the depth image.
FuseNet takes the whole RGB-D image I
RGB−D
∈
{(I
RGB
, I
D
)|I
RGB
∈ N
H×W×3
, I
D
∈ N
H×W
} with image
height H, image width W and 3 color channels as in-
put. The pixel values in the depth image I
D
thereby
correspond to the distance in millimeters between ob-
jects and the camera. The mask M ∈ L
H×W
with la-
bels L = {0, 1} returned by the segmentation model
is a 2-dimensional array, where pixels that represent
a human have label 1 and all the other pixels have la-
bel 0. This mask is multiplied elementwise with the
depth image I
D
and the resulting human-only depth
image I
Dh
is then transformed into a point cloud I
PC
by using the camera’s inverted intrinsic matrix K
−1
.
The resulting point cloud I
PC
allows the differenti-
ation between humans and the static environment and
can be used as input for human-aware and velocity
constrained path and motion planing as proposed by
Sisbot et al. (Sisbot et al., 2007) or Collins et al. (Shi
et al., 2008). Such path planning solutions allow a
faster movement of the individual robots while hu-
mans in the environment still feel comfortable when
the robot passes them with reduced velocity.
4 EVALUATION OF THE
SEGMENTATION RESULTS
In this section we evaluate the different segmentation
models on our dataset. The performance of the in-
dividual segmentation models is evaluated based on
the mean Intersection over Union (mIoU) metric and
the inference runtime speed. The corresponding val-
ues for the compared models are listed in Table 2 be-
low. The mIoU values are calculated w.r.t. 30 man-
ually annotated ground truth masks, the used desk-
top computer contains a i7-8700 CPU, 32 GB RAM
and a GTX 1080 GPU, while the laptop contains a
i5-7200U CPU, 16 GB RAM and no additional GPU.
The entire implemented software stack is based on the
Robot Operating System (ROS), a widely used soft-
RGB-D-based Human Detection and Segmentation for Mobile Robot Navigation in Industrial Environments
223
ware framework which offers solutions for common
tasks in robotics applications (Quigley et al., 2009).
Table 2: Runtime in milliseconds for CUDA-GPU desktop
computer (GPU) and CPU-only laptop (CPU). mIoU values
for segmentation models.
Model CPU Time GPU Time mIoU
Mask R-CNN 13103 820 0.5871
DeepLab-v3+ 6845 389 0.6098
DeepLab-v3+
MobileNet
637 79 0.5139
FuseNet - 37 0.6244
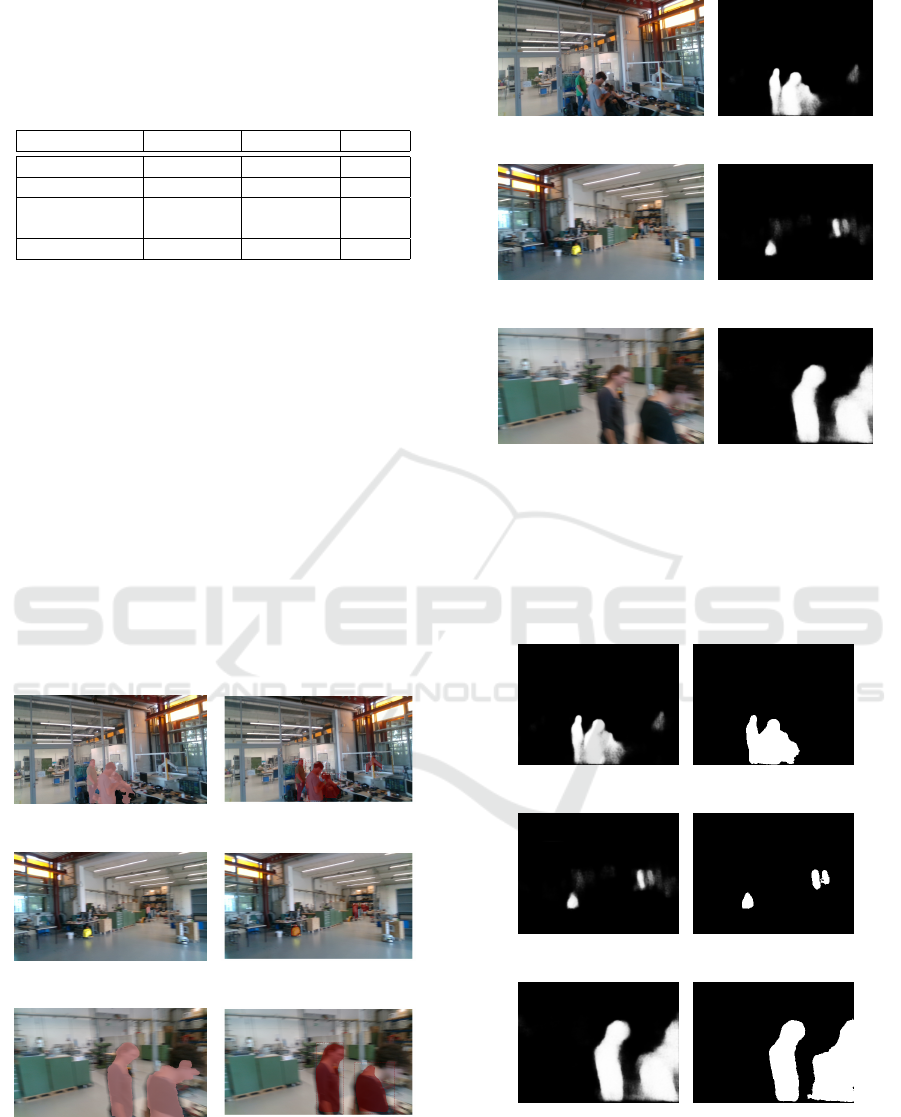
The segmentation masks calculated by our trained
FuseNet model (figure 6) provide a slightly higher ac-
curacy compared to the ones calculated with the pub-
licly available and pretrained models of Mask R-CNN
(He et al., 2017), DeepLab-v3+ and DeepLab-v3+
MobileNet (Chen et al., 2018), shown in figure 5.
While it has been shown that the adaption of the
original FuseNet model to industrial environments is
possible and shows promising results, it must be men-
tioned that the referenced models solely use color
information and a further comparison with different
RGB-D segmentation models is required. When com-
paring the computing time, it must also be taken
into account that FuseNet works with a significantly
lower resolution then the other networks (FuseNet:
320x240, Mask R-CNN: 1024x1024 DeepLav-v3+
(MobileNet): 512x288), which results in a direct re-
duction of the computing time.
(a) DeepLab-v3+ (b) Mask R-CNN
(c) DeepLab-v3+ (d) Mask R-CNN
(e) DeepLab-v3+ (f) Mask R-CNN
Figure 5: Segmentation results of DeepLab-v3+ and Mask
R-CNN.
(a) Input image (b) FuseNet
(c) Input image (d) FuseNet
(e) Input image (f) FuseNet
Figure 6: Segmentation results of FuseNet, sigmoid output
without threshold.
The effects of the hysteresis threshold on the
FuseNet output can be seen in figure 7. For example,
in the images of the first row the robot arm disappears
from the mask thanks to thresholding.
(a) FuseNet sigmoid (b) FuseNet threshold
(c) FuseNet sigmoid (d) FuseNet threshold
(e) FuseNet sigmoid (f) FuseNet threshold
Figure 7: FuseNet comparison of sigmoid output and
threshold output.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
224

5 CONCLUSION AND OUTLOOK
Within this paper, we presented an approach to use
FuseNet for the 3D segmentation of humans in in-
dustrial environments to create corresponding point
clouds for the adaptive path planning of mobile
robots. To automatically generate the training data an-
notations required for the FuseNet training, Mask R-
CNN pre-trained with the COCO dataset was used to
annotate the color and depth information acquired and
superimposed by the camera using the segmentation
masks calculated from the color image. On an eval-
uation dataset with manually annotated ground truth
masks, our trained FuseNet model was able to achieve
a higher mean intersection over union value at a re-
duced computing time compared to competing pre-
trained segmentation models. Due to the low compu-
tation time and good recognition quality, the model is
suitable for real-time 3D segmentation of persons to
enable human-aware path planning for mobile robots
from the resulting point cloud.
For future improvements, we intend to compare
our model which was trained using a weakly super-
vised strategy with the NYU trained FuseNet model
which is trained on expensive groundtruth annotation.
Additionally we are interested in evaluating CNNs
like DA-RNN (Xiang and Fox, 2017) and STD2P (He
et al., 2016) which take the temporal aspect of the data
into account, as tracking humans from frame to frame
instead of segmenting each frame in an isolated way
could yield better results.
ACKNOWLEDGEMENTS
The project receives funding from the German Fed-
eral Ministry of Education and Research under grant
agreement 05K19WEA (project RAPtOr).
REFERENCES
Chen, L., Zhu, Y., Papandreou, G., Schroff, F., and Adam,
H. (2018). Encoder-decoder with atrous separable
convolution for semantic image segmentation. CoRR,
abs/1802.02611.
Deng, J., Dong, W., Socher, R., Li, L., Li, K., and Fei-Fei,
L. (2009). Imagenet: A large-scale hierarchical im-
age database. In 2009 IEEE Conference on Computer
Vision and Pattern Recognition, pages 248–255.
Garcia-Garcia, A., Orts-Escolano, S., Oprea, S., Villena-
Martinez, V., and Rodr
´
ıguez, J. G. (2017). A review
on deep learning techniques applied to semantic seg-
mentation. CoRR, abs/1704.06857.
Gupta, S., Arbel
´
aez, P., and Malik, J. (2013). Perceptual or-
ganization and recognition of indoor scenes from rgb-
d images. In 2013 IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 564–571.
Hazirbas, C., Ma, L., Domokos, C., and Cremers, D.
(2016). Fusenet: Incorporating depth into semantic
segmentation via fusion-based cnn architecture. In
Asian Conference on Computer Vision.
Hazirbas, C., Ma, L., Domokos, C., and Cremers, D.
(2017). Fusenet. https://github.com/zanilzanzan/
FuseNet PyTorch.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In 2017 IEEE International Conference
on Computer Vision (ICCV), pages 2980–2988.
He, Y., Chiu, W., Keuper, M., and Fritz, M. (2016). RGBD
semantic segmentation using spatio-temporal data-
driven pooling. CoRR, abs/1604.02388.
Jafari, O. H., Mitzel, D., and Leibe, B. (2014). Real-time
rgb-d based people detection and tracking for mobile
robots and head-worn cameras. In In ICRA.
Koch, J., Wettach, J., Bloch, E., and Berns, K. (2007).
Indoor localisation of humans, objects, and mobile
robots with rfid infrastructure. In 7th International
Conference on Hybrid Intelligent Systems (HIS 2007),
pages 271–276.
Lin, T., Maire, M., Belongie, S. J., Bourdev, L. D., Girshick,
R. B., Hays, J., Perona, P., Ramanan, D., Doll
´
ar, P.,
and Zitnick, C. L. (2014). Microsoft COCO: common
objects in context. CoRR, abs/1405.0312.
Liu, J., Liu, Y., Zhang, G., Zhu, P., and Qiu Chen, Y. (2015).
Detecting and tracking people in real time with rgb-d
camera. Pattern Recognition Letters, 53:16–23.
Mosberger, R. and Andreasson, H. (2013). An inexpen-
sive monocular vision system for tracking humans in
industrial environments. In 2013 IEEE International
Conference on Robotics and Automation, pages 5850–
5857.
Munaro, M., Lewis, C., Chambers, D., Hvass, P., and
Menegatti, E. (2015). Rgb-d human detection and
tracking for industrial environments. In Intelligent Au-
tonomous Systems 13, pages 1655–1668.
Nathan Silberman, Derek Hoiem, P. K. and Fergus, R.
(2012). Indoor segmentation and support inference
from rgbd images. In ECCV.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., and Ng, A. Y. (2009). Ros: an
open-source robot operating system. In ICRA work-
shop on open source software, volume 3, page 5.
Kobe, Japan.
Shi, D., Collins Jr, E. G., Goldiez, B., Donate, A., and Dun-
lap, D. (2008). Human-aware robot motion planning
with velocity constraints. In 2008 International Sym-
posium on Collaborative Technologies and Systems,
pages 490–497.
Shotton, J., Fitzgibbon, A., Cook, M., Sharp, T., Finocchio,
M., Moore, R., Kipman, A., and Blake, A. (2011).
Real-time human pose recognition in parts from single
depth images. In CVPR 2011, pages 1297–1304.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
RGB-D-based Human Detection and Segmentation for Mobile Robot Navigation in Industrial Environments
225

volutional networks for large-scale image recognition.
CoRR, abs/1409.1556.
Sisbot, E. A., Marin-Urias, L. F., Alami, R., and Simeon, T.
(2007). A human aware mobile robot motion planner.
IEEE Transactions on Robotics, 23(5):874–883.
Song, S., Lichtenberg, S. P., and Xiao, J. (2015). Sun rgb-
d: A rgb-d scene understanding benchmark suite. In
2015 IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 567–576.
van der Walt, S., Sch
¨
onberger, J. L., Nunez-Iglesias, J.,
Boulogne, F., Warner, J. D., Yager, N., Gouillart,
E., Yu, T., and the scikit-image contributors (2014).
scikit-image: image processing in Python. PeerJ,
2:e453.
Xiang, Y. and Fox, D. (2017). DA-RNN: semantic mapping
with data associated recurrent neural networks. CoRR,
abs/1703.03098.
Zhang, H., Reardon, C., and Parker, L. E. (2013). Real-time
multiple human perception with color-depth cameras
on a mobile robot. IEEE Transactions on Cybernetics,
43(5):1429–1441.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
226
