
Inconsistency-tolerant Hierarchical Probabilistic Computation Tree
Logic and Its Application to Model Checking
Norihiro Kamide
1
and Noriko Yamamoto
2
1
Teikyo University, Faculty of Science and Engineering, Department of Information and Electronic Engineering,
Toyosatodai 1-1, Utsunomiya-shi, Tochigi 320-8551, Japan
2
Teikyo University, Graduate School of Science and Engineering, Division of Information Science,
Toyosatodai 1-1, Utsunomiya, Tochigi 320-8551, Japan
Keywords:
Probabilistic Temporal Logic, Inconsistency-tolerant Temporal Logic, Hierarchical Temporal Logic,
Probabilistic Model Checking, Inconsistency-tolerant Model Checking, Hierarchical Model Checking.
Abstract:
An inconsistency-tolerant hierarchical probabilistic computation tree logic (IHpCTL) is developed to establish
a new extended model checking paradigm referred to as IHpCTL model checking, which is intended to verify
randomized, open, large, and complex concurrent systems. The proposed IHpCTL is constructed based on
several previously established extensions of the standard probabilistic temporal logic known as probabilistic
computation tree logic (pCTL), which is widely used for probabilistic model checking. IHpCTL is shown to
be embeddable into pCTL and is relatively decidable with respect to pCTL. This means that the decidability of
pCTL with certain probability measures implies the decidability of IHpCTL. The results indicate that we can
effectively reuse the previously proposed pCTL model-checking algorithms for IHpCTL model checking.
1 INTRODUCTION
Model Checking: is a computer-assisted method used
to verify concurrent systems that can be modeled by
state-transition systems (Clarke and Emerson, 1981;
Clarke et al., 1999; Holzmann, 2006; Clarke et al.,
2018). The aim of this study is to develop a new tem-
poral logic that can establish a logical foundation of
extended model checking to verify randomized, open,
large, and complex concurrent systems. To develop
this type of temporal logic, combining and integrat-
ing probabilistic, inconsistency-tolerant, and hierar-
chical reasoning mechanisms into a single logic are
required. The reasons for these requirements are as
follows: (1) verifying randomized concurrent systems
(e.g., fault-tolerant communication systems over un-
reliable channels) requires the handling of probabilis-
tic reasoning (Bianco and de Alfaro, 1995), (2) ver-
ifying open and large concurrent systems (e.g., web
and cloud application systems) requires the handling
of inconsistency-tolerant reasoning (Chen and Wu,
2006), and (3) verifying complex concurrent systems
(e.g., web systems with wide tree structures) requires
the handling of hierarchical reasoning (Kaneiwa and
Kamide, 2011a).
To develop this type of logic , we combine and
integrate the following useful non-classical logics:
temporal logics, probabilistic (or probability) logics,
inconsistency-tolerant (or paraconsistent) logics, and
hierarchical (or sequential) logics. By combining and
integrating these non-classical logics, we can extend
and refine the previously established model-checking
frameworks (Clarke and Emerson, 1981; Clarke et al.,
1999; Holzmann, 2006; Clarke et al., 2018), which
are well-known as formal and automated techniques
for verifying concurrent systems. Model checking has
been extended to probabilistic model checking (Aziz
et al., 1995; Bianco and de Alfaro, 1995; Baier and
Kwiatkowska, 1998; Kwiatkowska et al., 2011; Baier
et al., 2018), inconsistency-tolerant model checking
(Easterbrook and Chechik, 2001; Chen and Wu, 2006;
Kaneiwa and Kamide, 2011b; Kamide and Endo,
2018), and hierarchical model checking (Kamide
and Kaneiwa, 2009; Kaneiwa and Kamide, 2011a;
Kamide, 2015; Kamide and Yano, 2017; Kamide,
2018). Therefore, by developing this combined and
integrated logic, we can combine and integrate these
extended model-checking frameworks.
In this study, we develop a new combined and in-
tegrated computation tree logic called inconsistency-
tolerant hierarchical probabilistic computation tree
logic (IHpCTL). This IHpCTL is developed to es-
tablish a new extended model checking paradigm re-
ferred to as IHpCTL model checking, which is in-
490
Kamide, N. and Yamamoto, N.
Inconsistency-tolerant Hierarchical Probabilistic Computation Tree Logic and Its Application to Model Checking.
DOI: 10.5220/0010181604900499
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 2, pages 490-499
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

tended to verify randomized, open, large, and com-
plex concurrent systems, including clinical reasoning
systems. We construct IHpCTL by combining and
integrating several previously established extensions
of the standard probabilistic temporal logic known
as probabilistic computation tree logic (pCTL) (Aziz
et al., 1995; Bianco and de Alfaro, 1995), which is
widely used for probabilistic model checking. As a
main contribution of this study, IHpCTL is shown
to be embeddable into pCTL and is relatively de-
cidable with respect to pCTL. This means that the
decidability of pCTL with certain probability mea-
sures implies the decidability of IHpCTL. These re-
sults indicate that we can effectively reuse the pre-
viously proposed pCTL model-checking algorithms
(Aziz et al., 1995; Bianco and de Alfaro, 1995) for
IHpCTL model checking.
We next explain pCTL and its probabilistic model-
checking framework. pCTL is an extension of the
standard temporal logic known as computation tree
logic (CTL) (Clarke and Emerson, 1981) for model
checking. It is obtained from CTL by adding the
probabilistic or probability operator P
≥x
. The formu-
las in the form of P
≥x
α are intended to be read as “the
probability of α holding in the future evolution of the
system is at least x.” pCTL was previously investi-
gated by Aziz et al. (Aziz et al., 1995) and Bianco and
de Alfaro (Bianco and de Alfaro, 1995). In (Bianco
and de Alfaro, 1995), pCTL was introduced to verify
the reliability properties and performances of the sys-
tems modeled by discrete Markov chains. In (Bianco
and de Alfaro, 1995), the complexities of model-
checking algorithms with respect to this logic were
clarified. In (Aziz et al., 1995), model-checking algo-
rithms for various extensions of the previous settings
of pCTL were proposed to verify probabilistic non-
deterministic concurrent systems. These algorithms
were shown to exhibit polynomial-time complexity
depending on the different sizes of the systems. The
main difference between the approaches of Aziz et al.
(Aziz et al., 1995) and Bianco and de Alfaro (Bianco
and de Alfaro, 1995) is the settings of the probability
measures in the probabilistic Kripke models of pCTL.
Although, as previously mentioned, pCTL and its
probabilistic model-checking framework are useful,
they are insufficient for handling open, large, and
complex concurrent systems such as very large and
complex cloud-based systems. Verifying these sys-
tems requires the handling of inconsistency-tolerant
reasoning. This is because in open and large concur-
rent systems, inconsistencies are inevitable and ap-
pear often (Chen and Wu, 2006). Verifying these sys-
tems also requires the handling of hierarchical reason-
ing, as complex concurrent systems are constructed
based on certain hierarchies (Kaneiwa and Kamide,
2011a). In addition, verifying clinical reasoning sys-
tems with complex disease ontologies, for example,
requires the handling of both inconsistency-tolerant
and hierarchical reasoning, as these types of systems
consist of both open data related to vague concepts
of symptoms and complex hierarchical structures of
disease ontologies (Kamide and Bernal J.P.A., 2019).
Thus, an extended logic with an extended model-
checking framework is needed that can also simul-
taneously handle inconsistency-tolerant, hierarchical,
and probabilistic reasoning.
For this direction, a few partial solutions were
obtained in some previous studies (Kamide and
Koizumi, 2015; Kamide and Koizumi, 2016; Kamide
and Yano, 2019; Kamide and Bernal J.P.A., 2019). An
inconsistency-tolerant (or paraconsistent) probabilis-
tic computation tree logic (PpCTL), which was ob-
tained from pCTL by adding the paraconsistent nega-
tion connective ∼, was developed in (Kamide and
Koizumi, 2015; Kamide and Koizumi, 2016) based
on a probability-measure-independent translation of
PpCTL to pCTL. A theorem for embedding PpCTL
into pCTL was proved using this translation and en-
tailed the relative decidability of PpCTL with respect
to pCTL. A hierarchical probabilistic computation
tree logic (HpCTL), which was obtained from pCTL
by adding the hierarchical (or sequence) modal oper-
ator [b], was developed in (Kamide and Yano, 2019)
based on a probability-measure-independent trans-
lation of HpCTL to pCTL. The same theorems as
those for PpCTL were obtained for HpCTL. A loca-
tive inconsistency-tolerant hierarchical probabilistic
computation tree logic (LIHpCTL), which is regarded
as an extension of both PpCTL and HpCTL with the
addition of the location operator [l
i
] introduced in
(N. Kobayashi and Yonezawa, 1999), was considered
in (Kamide and Bernal J.P.A., 2019).
However, the embedding and relative decidabil-
ity theorems for LIHpCTL proposed in (Kamide and
Bernal J.P.A., 2019) have not yet been proved, as
some technical difficulties remain. Thus, the objec-
tive of this study is to make progress in this direc-
tion. The current study proves the embedding and
relative decidability theorems for the proposed logic
IHpCTL, which is considered to be a modified ver-
sion of the location-operator-free subsystem of LIH-
pCTL. To prove these theorems, we need to overcome
some technical difficulties in formalizing and defin-
ing a satisfaction relation and proving some key lem-
mas for the embedding theorem. For example, some
previously proposed extended CTLs with the hierar-
chical modal operator [b] (see, for example, (Kamide
and Kaneiwa, 2009; Kaneiwa and Kamide, 2011a;
Inconsistency-tolerant Hierarchical Probabilistic Computation Tree Logic and Its Application to Model Checking
491

Kaneiwa and Kamide, 2010; Kamide, 2015)) were
shown to have complex multiple sequence-indexed
satisfaction relations |=
ˆ
d
, where
ˆ
d represents se-
quences. The proposed IHpCTL has a simple sin-
gle satisfaction relation |=
?
, which is compatible with
the standard single satisfaction relation of CTL. Using
this simple satisfaction relation, we can naturally for-
malize the interaction between [b] and ∼ in IHpCTL,
and through this natural formulation, we can prove
the required embedding theorem. However, a careful
treatment of the interaction of [b] and ∼ is required to
prove some key lemmas of the embedding theorem.
This rigorous treatment represents a technical contri-
bution of this study.
The remainder of this paper is organized as fol-
lows. In Section 2, we introduce the logic IHpCTL
and introduce some basic propositions for IHpCTL.
In Section 3, we prove the theorems for embedding
IHpCTL into HpCTL and pCTL, and using these em-
bedding theorems, we prove the theorems for relative
decidabilities for IHpCTL with respect to HpCTL and
pCTL. In Section 4, we conclude our study and ad-
dress some illustrative examples.
2 LOGIC
Formulas of inconsistency-tolerant hierarchical prob-
abilistic computation tree logic (IHpCTL) are con-
structed from countably many propositional variables
by → (implication), ∧ (conjunction), ∨ (disjunction),
¬ (classical negation), ∼ (paraconsistent negation),
X (next time), G (globally in the future), F (even-
tually in the future), U (until), R (release), A (all
computation paths), E (some computation path), P
≤x
(less than or equal probability), P
≥x
(greater than or
equal probability), P
<x
(less than probability), P
>x
(greater than probability), and [b] (hierarchical or se-
quence modal operator) where b is a sequence. Se-
quences are constructed from countably many atomic
sequences and
/
0 (empty sequence) by ; (composition).
The symbols X, G, F, U, and R are called tempo-
ral operators, the symbols A and E are called path
quantifiers, and the symbols P
≤x
, P
≥x
, P
<x
, and P
>x
are called probabilistic or probability operators. We
use lower-case letters p, q,r, ... to denote propositional
variables, Greek small letters α, β,γ, ... to denote for-
mulas, and lower-case letters b,c, d, ... to denote se-
quences. we use an expression α ↔ β to denote the
formula (α→β)∧(β→α) and an expression A ≡ B to
denote the syntactical identity between A and B. An
expression [
/
0]α means α, and expressions [
/
0 ; b]α and
[b ;
/
0]α mean [b]α. We use the symbol SE to de-
note the set of all sequences (including the empty se-
quence
/
0) and the symbol ω to denote the set of all
natural numbers. Furthermore, we use the symbol Φ
to denote a non-empty set of propositional variables,
the symbol Φ
0
to denote the set {p
0
| p ∈ Φ} of new
propositional variable, the symbol Φ
∼
is used to de-
note the set {∼p | p ∈ Φ}, the symbol Φ
[d]
to denote
the set {[d]p | p ∈ Φ}, the symbol Φ
0[d]
to denote the
set {[d]γ | γ ∈ Φ ∪ Φ
0
}, the symbol Φ
[d]
0
to denote the
set {γ
0
| γ ∈ Φ ∪ Φ
[d]
}, the symbol Φ
∼[d]
to denote
the set {[d]γ | γ ∈ Φ ∪ Φ
∼
}, and the symbol Φ
[d]∼
to
denote the set {∼γ | γ ∈ Φ∪Φ
[d]
}. We assume the fol-
lowing commutativity condition: For any p ∈ Φ and
any d ∈ SE, ([d]p)
0
= [d](p
0
) (i.e., it can simply be
denoted as [d]p
0
). Then, we have the following fact
by this commutativity condition: Φ
0[d]
= Φ
[d]
0
.
Definition 2.1. Let x be in [0, 1]. Formulas α and
sequences b of IHpCTL are defined by the following
grammar, assuming p and e represent propositional
variables and atomic sequences, respectively:
α ::= p | α∧α | α∨α | α→α | ¬α | ∼α |
AXα | EXα | AGα | EGα | AFα | EFα |
A(αUα) | E(αUα) | A(αRα) | E(αRα) |
P
≤x
α | P
≥x
α | P
<x
α | P
>x
α | [b]α.
b ::= e |
/
0 | b ; b.
We use an expression
[d] to denote [d
0
][d
1
]· ··[d
i
] with
i ∈ ω, d
i
∈ SE and d
0
≡
/
0. The expression [d] can be
the empty sequence and is not uniquely determined.
For example, if d ≡ d
1
; d
2
; d
3
where d
1
, d
2
and
d
3
are atomic sequences, then [d] means [d
1
][d
2
][d
3
],
[d
1
; d
2
][d
3
], [d
1
][d
2
; d
3
] or [d
1
; d
2
; d
3
]. Note that
[d]
can be [d] (i.e., [d] includes [d]).
Remark 2.2. We make the following remarks.
1. The inconsistency-tolerant negation connective
∼ characterizes inconsistency-tolerant logics
(also referred to as paraconsistent logics) (Priest,
2002; da Costa et al., 1995) that reject the law
(α∧∼α)→β of explosion. In comparison with
other logics, inconsistency-tolerant logics can
be used in inconsistency-tolerant reasoning. For
example, the following scenario is undesirable
in a realistic situation. The formulas of the
form (s(x)∧∼s(x))→d(x) are valid for any
symptom s and disease d, where ∼s(x) means
that “a person x does not have a symptom
s” and d(x) means that “a person x suffers
from a disease d.” The scenario described
as melancholia( john)∧∼melancholia( john)
will naturally emerge from the vague def-
inition of melancholia (i.e., the statement
“John has melancholia” may be judged
as true or false based on the perception
of different doctors or pathologists). In
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
492

this case, the formula (melancholia( john)∧
∼melancholia( john))→cancer( john) is valid in
non-inconsistency-tolerant logics, but invalid in
inconsistency-tolerant logics.
2. The hierarchical modal operator [b] can be used
to represent the concepts of hierarchical informa-
tion in the following manner: a sequence struc-
ture produces a monoid hM, ;,
/
0i with the follow-
ing informational interpretation (Wansing, 1993):
(1) M is a set of pieces of ordered information
(i.e., a set of sequences); (2) ‘;’ is a binary op-
erator (on M) that combines two pieces of infor-
mation (i.e., it is a concatenation operator on se-
quences); (3)
/
0 is an empty piece of information
(i.e., an empty sequence). Then, formulas of the
form [b
1
; b
2
;· ··; b
n
]α imply that α is true with
the sequence b
1
; b
2
;· ··; b
n
of ordered pieces of
information. In addition, formulas with the form
[
/
0]α, which coincide with α, imply that α is true
without any information (i.e., it is an eternal truth
in the sense of classical logic).
We define the logic IHpCTL as follows.
Definition 2.3 (IHpCTL). A structure (S,S
0
,R, µ
s
,L
?
)
is an inconsistency-tolerant hierarchical probabilistic
model iff
1. S is the set of states,
2. S
0
is a set of initial states and S
0
⊆ S,
3. R is a binary relation on S which satisfies the con-
dition:
∀s ∈ S ∃s
0
∈ S [(s,s
0
) ∈ R],
4. µ
s
is a certain probability measure concerning
s ∈ S: a set of paths beginning at s is mapped into
a real number in [0,1] (i.e., any sets of paths start-
ing from s are measurable),
5. L
?
is a mapping from S to the power set of
[
d∈SE
Φ
∼[d]
.
A path in an inconsistency-tolerant hierarchical
probabilistic model is an infinite sequence of states,
π = s
0
,s
1
,s
2
,... such that ∀i ≥ 0 [(s
i
,s
i+1
) ∈ R]. We
use the symbol Ω
s
to denote the set of all paths begin-
ning at s.
An inconsistency-tolerant hierarchical probabilis-
tic satisfaction relation (M, s) |=
?
α for any formula
α, where M is an inconsistency-tolerant hierarchical
probabilistic model (S, S
0
,R, µ
s
,L
?
), and s represents
a state in S, is defined by the following clauses:
1. for any γ ∈ Φ
∼[d]
, (M, s) |=
?
γ iff γ ∈ L
?
(s),
2. for any p ∈ Φ, (M, s) |=
?
[d]∼p iff (M,s) |=
?
∼[d]p,
3. (M, s) |=
?
[d][b]α iff (M,s) |=
?
[d ; b]α,
4. (M, s) |=
?
[d](α∧β) iff (M, s) |=
?
[d]α and (M,s) |=
?
[d]β,
5. (M, s) |=
?
[d](α∨β) iff (M, s) |=
?
[d]α or (M,s) |=
?
[d]β,
6. (M, s) |=
?
[d](α→β) iff (M, s) |=
?
[d]α implies
(M, s) |=
?
[d]β,
7. (M, s) |=
?
[d]¬α iff (M,s) 6|=
?
[d]α,
8. for any x ∈ [0,1], (M, s) |=
?
[d]P
≤x
α iff
µ
s
({w ∈ Ω
s
| (M, s) |=
?
[d]α}) ≤ x,
9. for any x ∈ [0,1], (M, s) |=
?
[d]P
≥x
α iff
µ
s
({w ∈ Ω
s
| (M, s) |=
?
[d]α}) ≥ x,
10. for any x ∈ [0,1], (M, s) |=
?
[d]P
<x
α iff
µ
s
({w ∈ Ω
s
| (M, s) |=
?
[d]α}) < x,
11. for any x ∈ [0,1], (M, s) |=
?
[d]P
>x
α iff
µ
s
({w ∈ Ω
s
| (M, s) |=
?
[d]α}) > x,
12. (M, s) |=
?
[d]AXα iff ∀s
1
∈ S [(s, s
1
) ∈ R implies
(M, s
1
) |=
?
[d]α],
13. (M, s) |=
?
[d]EXα iff ∃s
1
∈ S [(s,s
1
) ∈ R and
(M, s
1
) |=
?
[d]α],
14. (M, s) |=
?
[d]AGα iff for all paths π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, and all states s
i
along π, we have
(M, s
i
) |=
?
[d]α,
15. (M, s) |=
?
[d]EGα iff there is a path π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, and for all states s
i
along π, we have
(M, s
i
) |=
?
[d]α,
16. (M, s) |=
?
[d]AFα iff for all paths π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, there is a state s
i
along π such that
(M, s
i
) |=
?
[d]α,
17. (M, s) |=
?
[d]EFα iff there is a path π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, and for some state s
i
along π, we have
(M, s
i
) |=
?
[d]α,
18. (M, s) |=
?
[d]A(αUβ) iff for all paths π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, there is a state s
j
along π such that
(M, s
j
) |=
?
[d]β and ∀0 ≤ k < j (M, s
k
) |=
?
[d]α,
19. (M, s) |=
?
[d]E(αUβ) iff there is a path π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, and for some state s
j
along π, we have
(M, s
j
) |=
?
[d]β and ∀0 ≤ k < j (M, s
k
) |=
?
[d]α,
20. (M, s) |=
?
[d]A(αRβ) iff for all paths π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, and all states s
j
along π, we have
(M, s
j
) |=
?
[d]β or ∃0 ≤ k < j (M, s
k
) |=
?
[d]α,
21. (M, s) |=
?
[d]E(αRβ) iff there is a path π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, and for all states s
j
along π, we have
(M, s
j
) |=
?
[d]β or ∃0 ≤ k < j (M, s
k
) |=
?
[d]α,
22. (M, s) |=
?
[d]∼∼α iff (M,s) |=
?
[d]α,
23. (M, s) |=
?
[d]∼[b]α iff (M,s) |=
?
[d ; b]∼α,
24. (M, s) |=
?
[d]∼(α∧β) iff (M, s) |=
?
[d]∼α or (M, s) |=
?
[d]∼β,
25. (M, s) |=
?
[d]∼(α∨β) iff (M,s) |=
?
[d]∼α and
(M, s) |=
?
[d]∼β,
26. (M, s) |=
?
[d]∼(α→β) iff (M, s) 6|=
?
[d]∼α and
(M, s) |=
?
[d]∼β,
27. (M, s) |=
?
[d]∼¬α iff (M,s) 6|=
?
[d]∼α,
Inconsistency-tolerant Hierarchical Probabilistic Computation Tree Logic and Its Application to Model Checking
493

28. for any x ∈ [0, 1], (M, s) |=
?
[d]∼P
≤x
α iff
µ
s
({w ∈ Ω
s
| (M, s) |=
?
[d]∼α}) > x,
29. for any x ∈ [0, 1], (M, s) |=
?
[d]∼P
≥x
α iff
µ
s
({w ∈ Ω
s
| (M, s) |=
?
[d]∼α}) < x,
30. for any x ∈ [0, 1], (M, s) |=
?
[d]∼P
<x
α iff
µ
s
({w ∈ Ω
s
| (M, s) |=
?
[d]∼α}) ≥ x,
31. for any x ∈ [0, 1], (M, s) |=
?
[d]∼P
>x
α iff
µ
s
({w ∈ Ω
s
| (M, s) |=
?
[d]∼α}) ≤ x,
32. (M, s) |=
?
[d]∼AXα iff ∃s
1
∈ S [(s,s
1
) ∈ R and
(M, s
1
) |=
?
[d]∼α],
33. (M, s) |=
?
[d]∼EXα iff ∀s
1
∈ S [(s, s
1
) ∈ R implies
(M, s
1
) |=
?
[d]∼α],
34. (M, s) |=
?
[d]∼AGα iff there is a path π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, and for some state s
i
along π, we have
(M, s
i
) |=
?
[d]∼α,
35. (M, s) |=
?
[d]∼EGα iff for all paths π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, there is a state s
i
along π such that
(M, s
i
) |=
?
[d]∼α,
36. (M, s) |=
?
[d]∼AFα iff there is a path π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, and for all states s
i
along π, we have
(M, s
i
) |=
?
[d]∼α,
37. (M, s) |=
?
[d]∼EFα iff for all paths π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, and all states s
i
along π, we have
(M, s
i
) |=
?
[d]∼α,
38. (M, s) |=
?
[d]∼A(αUβ) iff there is a path π ≡
s
0
,s
1
,s
2
,..., where s ≡ s
0
, and for all states s
j
along
π, we have (M, s
j
) |=
?
[d]∼β or ∃0 ≤ k < j (M, s
k
) |=
?
[d]∼α,
39. (M, s) |=
?
[d]∼E(αUβ) iff for all paths π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, and all states s
j
along π, we have
(M, s
j
) |=
?
[d]∼β or ∃0 ≤ k < j (M, s
k
) |=
?
[d]∼α,
40. (M, s) |=
?
[d]∼A(αRβ) iff there is a path π ≡
s
0
,s
1
,s
2
,..., where s ≡ s
0
, and for some state s
j
along
π, we have (M,s
j
) |=
?
[d]∼β and ∀0 ≤ k < j (M,s
k
) |=
?
[d]∼α,
41. (M, s) |=
?
[d]∼E(αRβ) iff for all paths π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, there is a state s
j
along π such that
(M, s
j
) |=
?
[d]∼β and ∀0 ≤ k < j (M, s
k
) |=
?
[d]∼α,
42. (M, s) |=
?
∼[d]∼α iff (M,s) |=
?
[d]α,
43. (M, s) |=
?
∼[d][b]α iff (M,s) |=
?
∼[d ; b]α,
44. (M, s) |=
?
∼[d](α∧β) iff (M, s) |=
?
∼[d]α or (M, s) |=
?
∼[d]β,
45. (M, s) |=
?
∼[d](α∨β) iff (M,s) |=
?
∼[d]α and
(M, s) |=
?
∼[d]β,
46. (M, s) |=
?
∼[d](α→β) iff (M, s) 6|=
?
∼[d]α and
(M, s) |=
?
∼[d]β,
47. (M, s) |=
?
∼[d]¬α iff (M,s) 6|=
?
∼[d]α,
48. for any x ∈ [0, 1], (M, s) |=
?
∼[d]P
≤x
α iff
µ
s
({w ∈ Ω
s
| (M, s) |=
?
∼[d]α}) > x,
49. for any x ∈ [0, 1], (M, s) |=
?
∼[d]P
≥x
α iff
µ
s
({w ∈ Ω
s
| (M, s) |=
?
∼[d]α}) < x,
50. for any x ∈ [0, 1], (M, s) |=
?
∼[d]P
<x
α iff
µ
s
({w ∈ Ω
s
| (M, s) |=
?
∼[d]α}) ≥ x,
51. for any x ∈ [0, 1], (M, s) |=
?
∼[d]P
>x
α iff
µ
s
({w ∈ Ω
s
| (M, s) |=
?
∼[d]α}) ≤ x,
52. (M, s) |=
?
∼[d]AXα iff ∃s
1
∈ S [(s,s
1
) ∈ R and
(M, s
1
) |=
?
∼[d]α],
53. (M, s) |=
?
∼[d]EXα iff ∀s
1
∈ S [(s, s
1
) ∈ R implies
(M, s
1
) |=
?
∼[d]α],
54. (M, s) |=
?
∼[d]AGα iff there is a path π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, and for some state s
i
along π, we have
(M, s
i
) |=
?
∼[d]α,
55. (M, s) |=
?
∼[d]EGα iff for all paths π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, there is a state s
i
along π such that
(M, s
i
) |=
?
∼[d]α,
56. (M, s) |=
?
∼[d]AFα iff there is a path π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, and for all states s
i
along π, we have
(M, s
i
) |=
?
∼[d]α,
57. (M, s) |=
?
∼[d]EFα iff for all paths π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, and all states s
i
along π, we have
(M, s
i
) |=
?
∼[d]α,
58. (M, s) |=
?
∼[d]A(αUβ) iff there is a path π ≡
s
0
,s
1
,s
2
,..., where s ≡ s
0
, and for all states s
j
along
π, we have (M, s
j
) |=
?
∼[d]β or ∃0 ≤ k < j (M, s
k
) |=
?
∼[d]α,
59. (M, s) |=
?
∼[d]E(αUβ) iff for all paths π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, and all states s
j
along π, we have
(M, s
j
) |=
?
∼[d]β or ∃0 ≤ k < j (M, s
k
) |=
?
∼[d]α,
60. (M, s) |=
?
∼[d]A(αRβ) iff there is a path π ≡
s
0
,s
1
,s
2
,..., where s ≡ s
0
, and for some state s
j
along
π, we have (M,s
j
) |=
?
∼
[d]β and ∀0 ≤ k < j (M, s
k
) |=
?
∼[d]α,
61. (M, s) |=
?
∼[d]E(αRβ) iff for all paths π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, there is a state s
j
along π such that
(M, s
j
) |=
?
∼[d]β and ∀0 ≤ k < j (M, s
k
) |=
?
∼[d]α.
A formula α is valid in IHpCTL iff (M,s) |=
?
α holds for any inconsistency-tolerant hierarchical
probabilistic model M := (S,S
0
,R, µ
s
,L
?
), any s ∈ S,
and any inconsistency-tolerant hierarchical proba-
bilistic satisfaction relation |=
?
on M.
Definition 2.4. Let M be an inconsistency-
tolerant hierarchical probabilistic model
M := (S, S
0
,R, µ
s
,L
?
) for IHpCTL, and |=
?
be
an inconsistency-tolerant hierarchical probabilistic
satisfaction relation on M. Then, the model checking
problem for IHpCTL is defined as follows. For any
formula α, find the set {s ∈ S | M, s |=
?
α}.
Remark 2.5. We make the following remarks.
1. The logic IHpCTL is an extension of the following
temporal logics: Probabilistic computation tree
logic (pCTL) studied in (Aziz et al., 1995; Bianco
and de Alfaro, 1995), inconsistency-tolerant com-
putation tree logic (also referred to as pCTL,
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
494

but different from the aforementioned probabilis-
tic one) proposed in (Kamide and Endo, 2018),
and hierarchical computation tree logic (sCTL)
proposed in (Kamide and Yano, 2017; Kamide,
2018).
2. The definition of µ
s
is not precisely and explic-
itly given in this study, because (1) the proposed
translation from IHpCTL to HpCTL is indepen-
dent of the setting of µ
s
and (2) there are some
different ways of defining µ
s
.
3. There are some ways of defining a probability
measure µ
s
. For example, two probability mea-
sures µ
+
s
and µ
−
s
, which were defined on a Borel σ-
algebra B
s
(⊆ 2
Ω
s
), were proposed in (Bianco and
de Alfaro, 1995) for pCTL. A probability mea-
sure µ
s
, which is concerned with certain discrete
Markov processes, was proposed in (Aziz et al.,
1995) for pCTL.
4. The setting of the conditions concerning the
negated implication and negated negation in IH-
pCTL adopts the axiom schemes ∼(α→β) ↔
¬∼α∧∼β and ∼¬α ↔ ¬∼α. These axiom
schemes were originally introduced by De and
Omori in (De and Omori, 2015).
5. The single-satisfaction relation |=
?
of IHpCTL is
compatible with the standard single-satisfaction
relation of CTL. By using this satisfaction rela-
tion, we can simply and uniformly handle both ∼
and [b].
Proposition 2.6. Let M be an inconsistency-tolerant
hierarchical probabilistic model (S,S
0
,R, µ
s
,L
?
), and
let s be a state in S, Then, the following clauses hold
for IHpCTL: For any formula α and any b, c, d ∈ SE,
1. (M, s) |=
?
[b][c]α iff (M, s) |=
?
[b ; c]α,
2. (M, s) |=
?
[d]α iff (M, s) |=
?
[d]α,
3. (M, s) |=
?
[d]∼α iff (M, s) |=
?
∼[d]α.
Proof. By induction on α.
3 EMBEDDABILITY AND
RELATIVE DECIDABILITY
In order to prove the relative decidability theorem for
IHpCTL with respect to pCTL, we need a theorem
for embedding IHpCTL into the ∼-free part HpCTL
of IHpCTL. By combining this theorem for embed-
ding IHpCTL into HpCTL and the previously proved
theorem in (Kamide and Yano, 2019) for embedding
HpCTL into pCTL, we can obtain the relative decid-
ability of IHpCTL with respect to pCTL. Thus, we
introduce HpCTL below. The language and formu-
las of HpCTL are respectively obtained from those of
IHpCTL by deleting ∼.
Definition 3.1 (HpCTL). A structure (S, S
0
,R, µ
s
,L)
is a hierarchical probabilistic model iff S, S
0
, R, and
µ
s
are the same as those in Definition 2.3, and
L is a mapping from S to the power set of
[
d∈SE
Φ
[d]
.
A path in a hierarchical probabilistic model is defined
in a similar way as in Definition 2.3.
A hierarchical probabilistic satisfaction relation
(M, s) |= α for any formula α, where M is a hierar-
chical probabilistic model (S,S
0
,R, µ
s
,L) and s repre-
sents a state in S, is defined inductively by the same
clauses 3 – 21 in Definition 2.3 (but |=
?
in Defini-
tion 2.3 should be replaced with |=) and the following
clause:
For any p ∈ Φ, (M, s) |= [d]p iff [d]p ∈ L(s).
A formula α is valid in HpCTL iff (M,s) |= α
holds for any hierarchical probabilistic model M :=
(S, S
0
,R, µ
s
,L), any s ∈ S, and any hierarchical prob-
abilistic satisfaction relation |= on M.
We define the logic pCTL, which was originally
studied in (Aziz et al., 1995; Bianco and de Alfaro,
1995).
Definition 3.2 (pCTL). The logic pCTL is defined as
the [b]-free part of HpCTL (i.e., it is obtained from
HpCTL by replacing the sequences d and b with the
empty sequence
/
0).
We define a translation from IHpCTL to HpCTL.
Definition 3.3. The language L
i
(the set of formulas)
of IHpCTL is defined using Φ, ∧, ∨, →,¬, ∼, X, G,
F, U, R, A, E, P
≤x
,P
≥x
,P
<x
,P
>x
, and [b]. The lan-
guage L of HpCTL is obtained from L
i
by adding Φ
0
and deleting ∼. A mapping f from L
i
to L is defined
inductively by:
1. for any p ∈ Φ, f (p) := p and f (∼p) := p
0
∈ Φ
0
,
2. f (α ] β) := f (α) ] f (β) where ] ∈ {∧,∨, →},
3. f (]α) := ] f (α) where ] ∈
{¬,AX, EX, AG, EG,AF,EF, P
≤x
,P
≥x
,P
<x
,P
>x
,[b]},
4. f (A(α ] β)) := A( f (α) ] f (β)) where ] ∈ {U, R},
5. f (E(α ] β)) := E( f (α) ] f (β)) where ] ∈ {U,R},
6. f (∼∼α) := f (α),
7. f (∼(α∧β)) := f (∼α)∨ f (∼β),
8. f (∼(α∨β)) := f (∼α)∧ f (∼β),
9. f (∼(α→β)) := ¬ f (∼α)∧ f (∼β),
10. f (∼]α) := ] f (∼α) where ] ∈ {¬, [b]},
11. f (∼AXα) := EX f (∼α),
12. f (∼EXα) := AX f (∼α),
Inconsistency-tolerant Hierarchical Probabilistic Computation Tree Logic and Its Application to Model Checking
495

13. f (∼AGα) := EF f (∼α),
14. f (∼EGα) := AF f (∼α),
15. f (∼AFα) := EG f (∼α),
16. f (∼EFα) := AG f (∼α),
17. f (∼A(αUβ)) := E( f (∼α)R f (∼β)),
18. f (∼E(αUβ)) := A( f (∼α)R f (∼β)),
19. f (∼A(αRβ)) := E( f (∼α)U f (∼β)),
20. f (∼E(αRβ)) := A( f (∼α)U f (∼β)),
21. f (∼P
≤x
α) := P
>x
f (∼α),
22. f (∼P
≥x
α) := P
<x
f (∼α),
23. f (∼P
<x
α) := P
≥x
f (∼α),
24. f (∼P
>x
α) := P
≤x
f (∼α).
Lemma 3.4. Let f be the mapping defined in Def-
inition 3.3. For any inconsistency-tolerant hierar-
chical probabilistic model M := (S,S
0
,R, µ
s
,L
?
) of
IHpCTL, and any inconsistency-tolerant hierarchi-
cal probabilistic satisfaction relation |=
?
on M, we
can construct a hierarchical probabilistic model N :=
(S, S
0
,R, µ
s
,L) of HpCTL and a hierarchical proba-
bilistic satisfaction relation |= on N such that for any
formula α in L
i
, any sequence d in L
i
, and any state
s in S, (M, s) |=
?
[d]α iff (N, s) |= [d] f (α).
Proof. Suppose that M is an inconsistency-tolerant
hierarchical probabilistic model (S, S
0
,R, µ
s
,L
?
) s.t.
L
?
is a mapping from S to the power set of
[
d∈SE
Φ
∼[d]
.
We then define a hierarchical probabilistic model
N := (S,S
0
,R, µ
s
,L) such that
1. L is a mapping from S to the power set of
[
d∈SE
Φ
0[d]
,
2. for any s ∈ S, any p ∈ Φ, and any c ∈ SE,
(a) [c]p ∈ L
?
(s) iff [c]p ∈ L(s),
(b) [c]∼p ∈ L
?
(s) iff [c]p
0
∈ L(s).
This lemma is then proved by induction on α.
• Base step:
1. Case α ≡ p ∈ Φ: We obtain: (M, s) |=
?
[d]p iff
[d]p ∈ L
?
(s) iff [d]p ∈ L(s) iff (N, s) |= [d]p iff
(N,s) |= [d] f (p) (by the definition of f ).
2. Case α ≡ ∼p ∈ Φ: We obtain: (M, s) |=
?
[d]∼p
iff [d]∼p ∈ L
?
(s) iff [d]p
0
∈ L(s) iff (N, s) |= [d]p
0
iff (N,s) |= [d] f (∼p) (by the definition of f ).
• Induction step: We show some cases.
1. Case α ≡ [b]β (b ∈SE): We obtain: (M,s) |=
?
[d][b]β iff (M, s) |=
?
[d ; b]β iff (N,s) |=
[d ; b] f (β) (by induction hypothesis) iff (N,s) |=
[d][b] f (β) iff (N, s) |= [d] f ([b]β) (by the defini-
tion of f ).
2. Case α ≡ P
≤x
β: We obtain: (M, s) |=
?
[d]P
≤x
β iff
µ
s
({w ∈ Ω
s
| (M, w) |=
?
[d]β}) ≤ x iff µ
s
({w ∈
Ω
s
| (N, w) |= [d] f (β)}) ≤ x (by induction hy-
pothesis) iff (N, s) |= [d]P
≤x
f (β) iff (N, s) |=
[d] f (P
≤x
β) (by the definition of f ).
3. Case α ≡ ∼[b]β (b ∈SE): We obtain: (M, s) |=
?
[d]∼[b]β iff (M, s) |=
?
∼[d][b]β (by Proposition
2.6 (3)) iff (M, s) |=
?
∼[d ; b]β iff (M, s) |=
?
[d ; b]∼β (by Proposition 2.6 (3)) iff (N, s) |=
[d ; b] f (∼β) (by induction hypothesis) iff
(N,s) |= [d][b] f (∼β) iff (N, s) |= [d] f (∼[b]β) (by
the definition of f ).
4. Case α ≡ ∼∼β: We obtain: (M, s) |=
?
[d]∼∼β iff
(M, s) |=
?
[d]β iff (N, s) |= [d] f (β) (by induction
hypothesis) (N, s) |= [d] f (∼∼β) (by the definition
of f ).
5. Case α ≡ ∼¬β: We obtain: (M,s) |=
?
[d]∼¬β
iff (M,s) 6|=
?
[d]∼β iff (N, s) 6|= [d] f (∼β) (by in-
duction hypothesis) iff (N, s) |= [d]¬ f (∼β) iff
(N,s) |= [d] f (∼¬β) (by the definition of f ).
6. Case α ≡ ∼(β→γ): We obtain: (M,s) |=
?
[d]∼(β→γ) iff (M, s) 6|=
?
[d]∼β and (M, s) |=
?
[d]∼γ iff (N, s) 6|= [d] f (∼β) and (N,s) |=
[d] f (∼γ) (by induction hypothesis) iff (N, s) |=
[d](¬ f (∼β)∧ f (∼γ)) iff (N,s) |= [d] f (∼(β→γ))
(by the definition of f ).
7. Case α ≡ ∼A(βUγ): We obtain:
(M, s) |=
?
[d]∼A(βUγ)
iff there is a path π ≡ s
0
,s
1
,s
2
,..., where s ≡ s
0
,
and for all states s
j
along π, we have (M, s
j
) |=
?
[d]∼γ or ∃0 ≤ k < j (M,s
k
) |=
?
[d]∼β
iff there is a path π ≡ s
0
,s
1
,s
2
,..., where s ≡ s
0
,
and for all states s
j
along π, we have (N,s
j
) |=
[d] f (∼γ) or ∃0 ≤ k < j (N, s
k
) |= [d] f (∼β) (by
induction hypothesis)
iff (N, s) |= [d](E( f (∼β)R f (∼γ)))
iff (N, s) |= [d] f (∼A(βUγ)) (by the definition of
f ).
8. Case α ≡ ∼P
≤x
β: We obtain: (M,s) |=
?
[d]∼P
≤x
β
iff µ
s
({w ∈ Ω
s
| (M, w) |=
?
[d]∼β}) > x iff
µ
s
({w ∈ Ω
s
| (N, w) |= [d] f (∼β)}) > x (by in-
duction hypothesis) iff (N,s) |= [d]P
>x
f (∼β) iff
(N,s) |= [d] f (∼P
≤x
β) (by the definition of f ).
Lemma 3.5. Let f be the mapping defined in Defi-
nition 3.3. For any hierarchical probabilistic model
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
496

N := (S, S
0
,R, µ
s
,L) of HpCTL, and any hierarchi-
cal probabilistic satisfaction relation |= on N, we
can construct an inconsistency-tolerant hierarchical
probabilistic model M := (S,S
0
,R, µ
s
,L
?
) of IHpCTL
and an inconsistency-tolerant hierarchical proba-
bilistic satisfaction relation |=
?
on M such that for
any formula α in L
i
, any d in L
i
, and any state s in S,
(N,s) |= [d] f (α) iff (M, s) |=
?
[d]α.
Proof. Similar to the proof of Lemma 3.4.
We then obtain the following theorem.
Theorem 3.6 (Embedding from IHpCTL into
HpCTL). IHpCTL is embeddable into HpCTL.
Namely, we have the following. Let f be the map-
ping defined in Definition 3.3. For any formula α, α
is valid in IHpCTL iff f (α) is valid in HpCTL.
Proof. By Lemmas 3.4 and 3.5 (by taking d as
/
0).
We can also obtain the following theorem.
Theorem 3.7 (Embedding from IHpCTL into pCTL).
IHpCTL is embeddable into pCTL.
Proof. By combining Theorem 3.6 and the theorem
proved in (Kamide and Yano, 2019) for embedding
HpCTL into pCTL.
We then obtain the following theorem.
Theorem 3.8 (Relative decidability for IHpCTL with
respect to HpCTL). If the model-checking, validity,
and satisfiability problems for HpCTL with a certain
probability measure are decidable, then the model-
checking, validity, and satisfiability problems for IH-
pCTL with the same probability measure as that of
HpCTL are also decidable.
Proof. Suppose that the probability measure µ
s
in the
underlying inconsistency-tolerant hierarchical proba-
bilistic model (S,S
0
,R, µ
s
, L
?
) of IHpCTL is the same
as the underlying hierarchical probabilistic model
(S, S
0
,R, µ
s
, L) of HpCTL. Suppose also that HpCTL
with µ
s
is decidable. Then, by the mapping f , a
formula α of IHpCTL can be transformed into the
corresponding formula f (α) of HpCTL. By Lem-
mas 3.4 and 3.5 and Theorem 3.6, the model check-
ing, validity and satisfiability problems for IHpCTL
can be transformed into those of HpCTL. Since the
model checking, validity and satisfiability problems
for HpCTL with µ
s
are decidable by the assump-
tion, the problems for IHpCTL with µ
s
are also de-
cidable.
We can also obtain the following theorem.
Theorem 3.9 (Relative decidability for IHpCTL with
respect to pCTL). If the model-checking, validity,
and satisfiability problems for pCTL with a certain
probability measure are decidable, then the model-
checking, validity, and satisfiability problems for IH-
pCTL with the same probability measure as that of
pCTL are also decidable.
Proof. By combining Theorem 3.8 and the theorem
proved in (Kamide and Yano, 2019) for the relative
decidability of HpCTL with respect to pCTL.
Remark 3.10. The model checking problem for the
logic pCTL with the probability measures µ
+
s
and µ
−
s
introduced by Bianco and de Alfaro was shown to be
decidable in (Bianco and de Alfaro, 1995). The model
checking problem for the logic pCTL with the proba-
bility measure µ
s
introduced by Aziz et al. was shown
to be decidable in (Aziz et al., 1995). Thus, an ex-
tended IHpCTL with the above-mentioned probabil-
ity measures by Bianco and de Alfaro or by Aziz et al.
is also decidable by Theorem 3.9. If we consider a
sublogic without any probability measures, the deci-
sion problems for such a logic are decidable.
4 CONCLUSION AND REMARKS
In this study, the inconsistency-tolerant hierarchical
probabilistic computation tree logic IHpCTL was in-
troduced to establish a new extended model check-
ing paradigm referred to as IHpCTL model checking,
which can verify randomized, open, large, and com-
plex concurrent systems. The proposed logic IHpCTL
was shown to be embeddable into HpCTL and pCTL
and relatively decidable with respect to HpCTL and
pCTL. This means that the decidabilities of HpCTL
and pCTL with certain probability measures imply
the decidability of IHpCTL. This study thus showed
that we can effectively reuse the previously proposed
pCTL model-checking algorithms for IHpCTL model
checking.
As an example of IHpCTL model checking, we
next consider a lung cancer model presented as Fig-
ure 1. Lung cancer, also known as lung carcinoma,
is a disease or malignant lung tumor characterized
by uncontrolled cell growth in tissues of the lung
(Wikipedia, 2020). This growth can spread beyond
the lungs by the process of metastasis into nearby tis-
sue or other parts of the body. In this example, we can
express the following formula:
[Cancer ; LungCancer]AG(stage4∧
hasMalignantTumor∧pain f ul∧∼healthy
→ EF(P
≤0.89
death∧P
≥0.87
death)
Inconsistency-tolerant Hierarchical Probabilistic Computation Tree Logic and Its Application to Model Checking
497
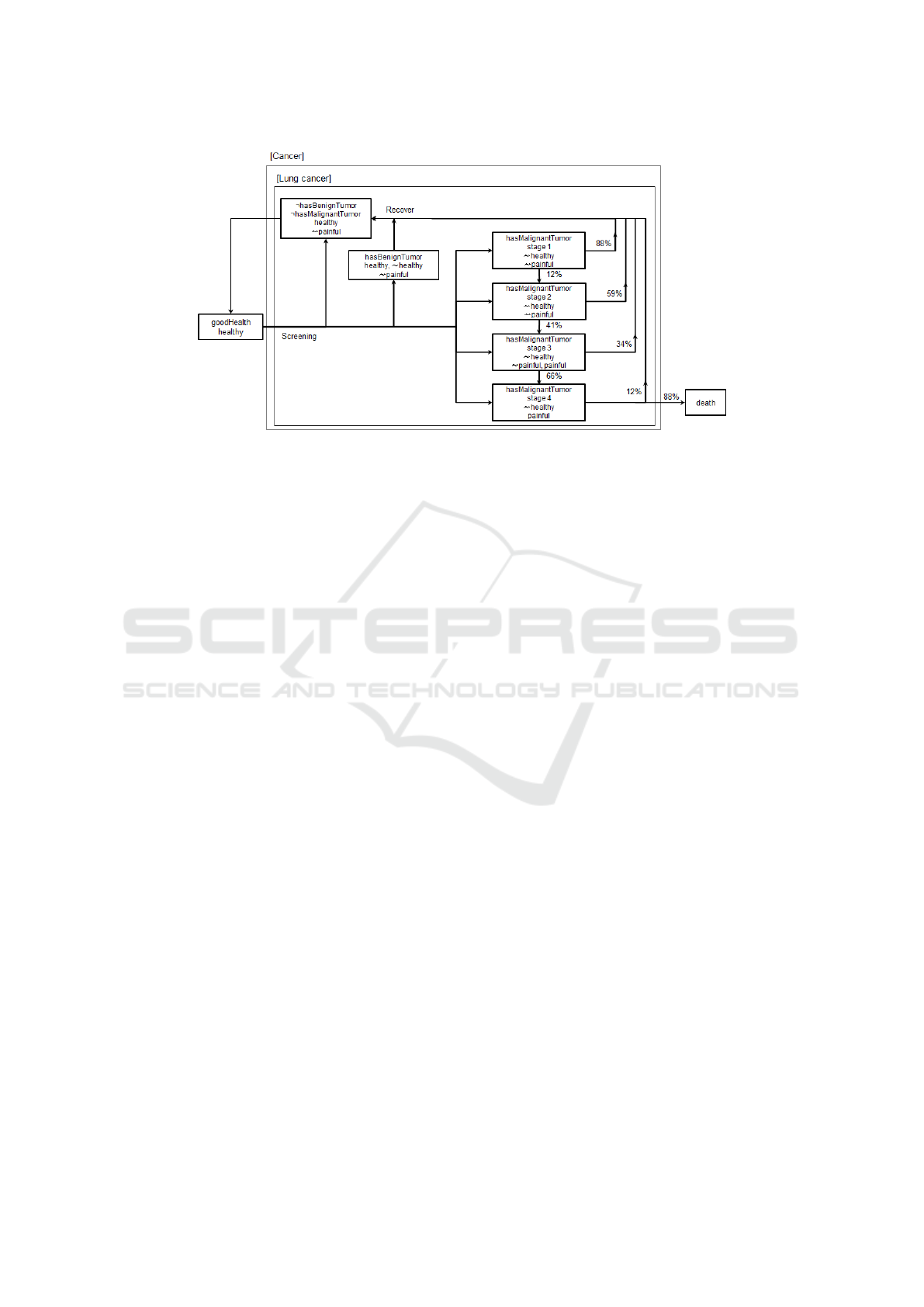
Figure 1: Lung cancer model.
which implies the following:
“If a person with lung cancer Stage 4 has
a malignant tumor (i.e., lung cancer), is not
healthy, and has pain, then there is a probabil-
ity of approximately 88 percent exists that this
person will die in the near future.”
This statement is true and we can verify it using the
translation from IHpCTL to pCTL. In other words,
the IHpCTL formula can be verified using the cor-
responding pCTL formula by the translation. Us-
ing the translation, we can obtain the corresponding
pCTL formula as follows: AG(q
1
∧ q
2
∧ q
3
∧ q
4
→
EF(P
≤0.89
q
5
∧P
≥0.87
q
5
) where q
1
,q
2
,q
3
,q
4
, and q
5
are distinct propositional variables.
Finally, we make the following remarks on re-
lated works. Probabilistic temporal logics, includ-
ing pCTL, inconsistency-tolerant (or paraconsistent)
temporal logics, hierarchical (or sequential) tem-
poral logics, and their applications to probabilistic,
inconsistency-tolerant, and hierarchical model check-
ing, have been investigated by many researchers. For
more information on probabilistic temporal logics
and their model-checking applications, see (Hanson,
1994; Hansson and Jonsson, 1994; Aziz et al., 1995;
Bianco and de Alfaro, 1995; Baier and Kwiatkowska,
1998; Kwiatkowska et al., 2011; Kamide and
Koizumi, 2016; Baier et al., 2018; Kamide and Bernal
J.P.A., 2019; Kamide and Yano, 2019). For more
information on inconsistency-tolerant temporal log-
ics and their model-checking applications, see (East-
erbrook and Chechik, 2001; Chen and Wu, 2006;
Kamide, 2006; Kamide and Wansing, 2011; Kamide
and Kaneiwa, 2010; Kaneiwa and Kamide, 2011b;
Kamide, 2015; Kamide and Koizumi, 2016; Kamide
and Endo, 2018). For more information on hierarchi-
cal temporal logics and their model-checking appli-
cations, see (Kamide and Kaneiwa, 2009; Kaneiwa
and Kamide, 2010; Kaneiwa and Kamide, 2011a;
Kamide, 2015; Kamide and Yano, 2017; Kamide,
2018; Kamide and Yano, 2019). Finally, for a sur-
vey of a few closely related studies on probabilistic,
inconsistency-tolerant, and hierarchical temporal log-
ics and their applications, see (Kamide and Bernal
J.P.A., 2019).
ACKNOWLEDGEMENTS
We would like to thank the anonymous referees for
their valuable comments. This research was sup-
ported by Grant-in-Aid for the Japan Research Insti-
tute of Industrial Science and JSPS KAKENHI Grant
Numbers JP18K11171 and JP16KK0007.
REFERENCES
Aziz, A., Singhal, V., and Balarin, F. (1995). It usually
works: The temporal logic of stochastic systems. In
Proceedings of the 7th Int. Conf. on Computer Aided
Verification (CAV 1995), Lecture Notes in Computer
Science 939, pages 155–165.
Baier, C., de Alfaro, L., Forejt, V., and Kwiatkowska, M.
(2018). Model Checking Probabilistic Systems, In:
Handbook of Model Checking, pp. 963-999. Springer.
Baier, C. and Kwiatkowska, M. (1998). Model checking
for a probabilistic branching time logic with fairnes.
Distributed Computing, 11:125–155.
Bianco, A. and de Alfaro, L. (1995). Model checking of
probabilistic and nondeterministic systems. In Pro-
ceedings of the 15th Conf. on Foundations of Soft-
ware Technology and Theoretical Computer Science
(FSTTCS 1995), Lecture Notes in Computer Science
1026, pages 499–513.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
498

Chen, D. and Wu, J. (2006). Reasoning about inconsistent
concurrent systems: A non-classical temporal logic.
In Lecture Notes in Computer Science, volume 3831,
pages 207–217.
Clarke, E. and Emerson, E. (1981). Design and synthesis of
synchronization skeletons using branching time tem-
poral logic. In Lecture Notes in Computer Science,
volume 131, pages 52–71.
Clarke, E., Grumberg, O., and Peled, D. (1999). Model
checking. The MIT Press.
Clarke, E., Henzinger, T., Veith, H., and Bloem, R. (2018).
Handbook of Model Checking. Springer.
da Costa, N., Beziau, J., and Bueno, O. (1995). Aspects of
paraconsistent logic. Bulletin of the IGPL, 3 (4):597–
614.
De, M. and Omori, H. (2015). Classical negation and ex-
pansions of belnap–dunn logic. Studia Logica, 103
(4):825–851.
Easterbrook, S. and Chechik, M. (2001). A framework for
multi-valued reasoning over inconsistent viewpoints.
In Proceedings of the 23rd International Conference
on Software Engineering (ICSE 2001), pages 411–
420.
Hanson, H. (1994). Time and probability in formal design of
distributed systems, real-time safety critical systems.
Elsevier.
Hansson, H. and Jonsson, B. (1994). A logic for reasoning
about time and reliability. Formal Aspects of Comput-
ing, 6 (5):512–535.
Holzmann, G. (2006). The SPIN model checker: Primer
and reference manual. Addison-Wesley.
Kamide, N. (2006). Extended full computation-tree logics
for paraconsistent model checking. Logic and Logical
Philosophy, 15 (3):251–276.
Kamide, N. (2015). Inconsistency-tolerant temporal rea-
soning with hierarchical information. Information Sci-
ences, 320:140–155.
Kamide, N. (2018). Logical foundations of hierarchical
model checking. Data Technologies and Applications,
52 (4):539–563.
Kamide, N. and Bernal J.P.A. (2019). Towards loca-
tive inconsistency-tolerant hierarchical probabilistic
ctl model checking: Survey and future work. In
Proceedings of the 11th International Conference on
Agents and Artificial Intelligence (ICAART 2019),
volume 2, pages 869–878.
Kamide, N. and Endo, K. (2018). Logics and transla-
tions for inconsistency-tolerant model checking. In
Proceedings of the 10th International Conference on
Agents and Artificial Intelligence (ICAART 2018),
volume 2, pages 191–200.
Kamide, N. and Kaneiwa, K. (2009). Extended full
computation-tree logic with sequence modal operator:
Representing hierarchical tree structures. Proceedings
of the 22nd Australasian Joint Conference on Artifi-
cial Intelligence (AI’09), Lecture Notes in Artificial
Intelligence, 5866:485–494.
Kamide, N. and Kaneiwa, K. (2010). Paraconsistent nega-
tion and classical negation in computation tree logic.
In Proceedings of the 2nd International Conference
on Agents and Artificial Intelligence (ICAART 2010),
volume 1, pages 464–469.
Kamide, N. and Koizumi, D. (2015). Combining paracon-
sistency and probability in ctl. Proceedings of the 7th
International Conference on Agents and Artificial In-
telligence (ICAART 2015), 2:285–293.
Kamide, N. and Koizumi, D. (2016). Method for combin-
ing paraconsistency and probability in temporal rea-
soning. Journal of Advanced Computational Intelli-
gence and Intelligent Informatics, 20:813–827.
Kamide, N. and Wansing, H. (2011). A paraconsistent
linear-time temporal logic. Fundamenta Informaticae,
106 (1):1–23.
Kamide, N. and Yano, R. (2017). Logics and translations
for hierarchical model checking. Proceedings of the
21st International Conference on Knowledge-Based
and Intelligent Information and Engineering Systems
(KES2017), Procedia Computer Science, 112:31–40.
Kamide, N. and Yano, Y. (2019). Towards hierarchical
probabilistic ctl model checking: Theoretical foun-
dation. Proceedings of the 11th International Con-
ference on Agents and Artificial Intelligence (ICAART
2019), 2:762–769.
Kaneiwa, K. and Kamide, N. (2010). Sequence-indexed
linear-time temporal logic: Proof system and applica-
tion. Applied Artificial Intelligence, 24 (10):896–913.
Kaneiwa, K. and Kamide, N. (2011a). Conceptual modeling
in full computation-tree logic with sequence modal
operator. International Journal of Intelligent Systems,
26 (7):636–651.
Kaneiwa, K. and Kamide, N. (2011b). Paraconsistent com-
putation tree logic. New Generation Computing, 29
(4):391–408.
Kwiatkowska, M., Norman, G., and Parker, D. (2011).
Prism 4.0: Verification of probabilistic real-time sys-
tems. Proceedings of the 23rd International Confer-
ence on Computer Aided Verification (CAV 11), Lec-
ture Notes in Computer Science, 6806:585–591.
N. Kobayashi, T. S. and Yonezawa, A. (1999). Distributed
concurrent linear logic programming. Theoretical
Computer Science, 227:185–220.
Priest, G. (2002). Paraconsistent logic, Handbook of Philo-
sophical Logic (Second Edition), Vol. 6, D. Gabbay
and F. Guenthner (eds.). Kluwer Academic Publish-
ers, Dordrecht, pp. 287-393.
Wansing, H. (1993). The logic of information structures.
In Lecture Notes in Computer Science, volume 681,
pages 1–163.
Wikipedia (2020). Lung cancer. Wikipedia, https:// en.
wikipedia.org/wiki/Lung cancer.
Inconsistency-tolerant Hierarchical Probabilistic Computation Tree Logic and Its Application to Model Checking
499
