
Unconstrained License Plate Detection in Hardware
Petr Musil
a
, Roman Jur
´
anek
b
and Pavel Zem
ˇ
c
´
ık
c
FIT, Brno University of Technology, Brno, Czech Republic
Keywords:
ALPR, Soft Cascade, Decision Trees, WaldBoost.
Abstract:
In this paper, we propose an FPGA implementation of license plate detection (LPD) in images captured by
arbitrarily placed cameras, vehicle-mounted cameras, or even handheld cameras. In such images, the license
plates can appear in a wide variety of positions and angles. Thus we cannot rely on a-priori known geometric
properties of the license plates as many contemporary applications do. Unlike the existing solutions targeted
for DSP, FPGA or similar low power devices, we do not make any assumptions about license plate size and
orientation in the image. We use multiple sliding window detectors based on simple image features, each
tuned to a specific range of projections. On a dataset captured by a camera mounted on a vehicle, we show
that detection rate is 98 % (and 98.7 % when combined with video tracking). We demonstrate that our FPGA
implementation can process 1280×1024 pixel image at over 40 FPS with a minimum width of detected license
plates approximately 100 pixels. The FPGA block is fully functional and it is intended to be used in a smart
camera to parking control in residential zones.
1 INTRODUCTION
License plate detection (LPD) is an essential part of
applications, such as detection of vehicles for traffic
monitoring and enforcement purposes, or as a basis
for automatic license plate recognition. In many in-
dustrial use cases, LPD is solved at a sufficiently ad-
vanced level in scenarios with restricted size, orienta-
tion, and in environment with controlled illumination
(e.g. using IR flashes). A vast number of research pa-
pers has addressed this controlled scenario, and it is
far beyond the scope of this paper to thoroughly re-
view them.
In this paper, we focus on license plate detection
implemented in FPGA in an image captured by arbi-
trarily placed cameras, vehicle-mounted cameras, or
even handheld cameras. The target applications in-
clude parking control in residential zones, detection
of stolen vehicles, and other applications, in which
license plates of cars are automatically detected and
recognized. Our goal was to improve the performance
of license plate detection process, to implement the
method in FPGA, and to provide the solution that
requires low resources and that is suitable for inte-
gration into hardware devices, or even directly into
a
https://orcid.org/0000-0001-9766-4759
b
https://orcid.org/0000-0003-0589-0172
c
https://orcid.org/0000-0001-7969-5877
37.27
42.33
35.77
32.09
Figure 1: We detect license plates in wide variety of defor-
mations in challenging light conditions. The images show
the detected license plates with a confidence value.
cameras. The license plates captured in the image
are distorted from their original rectangular shape by
perspective projection, see Figure 1 for a few exam-
ples. Due to the character of the data, the detection
and localization can not rely on an a-priori informa-
tion, such as license plate size or orientation in the
image. Moreover, lighting conditions, ranging from
Musil, P., Juránek, R. and Zem
ˇ
cík, P.
Unconstrained License Plate Detection in Hardware.
DOI: 10.5220/0010174000130021
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 13-21
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
13

Table 1: Summary of properties of state of the art detection algorithms. The accuracies reported by the works are not directly
comparable as the methods were evaluated on different data and by different testing protocols.
Rotation Candidate search Detection Platform Accuracy
(Mai et al., 2011) tilt Vertical gradient detection Character recognition PC 98 %
(Yang et al., 2011) Chroma and gradient filtering SVM FPGA/PC N/A
(Zhai et al., 2011) Edge detection, CCA Filtering by size, orientation and aspect ratio FPGA 99 %
(Jeffrey and Ramalingam, 2012) Edge and background detection, CCA Gradient statistics PC 97 %
(Khalil and Kurniawan, 2014) Edge detection SVM PC 88 %
(Biyabani et al., 2015) Edge detection Segmentation with projections, template matching FPGA 84 %
(Ha and Shakeri, 2016) Edge and background detection Character recognition with template matching PC 84 %
(Chhabra et al., 2016) Segmentation with edge detection Filtering by size and aspect ratio FPGA 99 %
(Elbamby et al., 2016) Edge detection LBP cascade PC 94 %
(Yuan et al., 2017) Adaptive threshold and edge detection SVM PC 96 %
(Xie et al., 2018) Free – CNN–YOLO PC/GPU 99.5 %
(Silva and Jung, 2018) Free – CNN PC/GPU 98.35 %
(Sborz et al., 2019) Morphologic operation, CCA Character segmentation FPGA –
(Yousefi et al., 2019) Background subtraction LBP cascade PC 98 %
(Chen and Wang, 2020) Free – CNN + AdaBoos cascade PC/GPU 99.9 %
(Gao et al., 2020) Free – CNN PC/GPU 99.9 %
(WU et al., 2020) corner detection and morphological op. CNN PC/GPU 97.2 %
This work Free – soft cascade with LBP FPGA 98 %
deep shadows to overexposures, prevents using edge
detection, gradient-based methods, and segmentation-
based methods.
2 RELATED WORK
An overview of several works on license plate detec-
tion with a focus on those implemented in embed-
ded systems or PC is shown in Table 1. Many of the
works are intended for stationary cameras and appli-
cations where the rough location and size of license
plate is known (Biyabani et al., 2015; Ha and Shak-
eri, 2016; Jeffrey and Ramalingam, 2012; Zhai et al.,
2011; Chhabra et al., 2016; Khalil and Kurniawan,
2014; Yang et al., 2011; Yuan et al., 2017; Elbamby
et al., 2016; Hsu et al., 2013). In many cases, they
rely on the presence of the license plate edges to re-
duce search space.
Many methods (Anagnostopoulos et al., 2006;
Zhai et al., 2011; Jeffrey and Ramalingam, 2012)
are based on connected component analysis (CCA)
for the search of the candidate components in bina-
rized images. (Zhai et al., 2011) uses CCA with mor-
phological operators and filters the components using
knowledge about aspect ratio, size, and orientation.
(Anagnostopoulos et al., 2006) segments characters
within the CCA components by horizontal and verti-
cal projections. (Mai et al., 2011) uses edge-based
approach and rotation-free character recognition to
search for tilted license plates. (Wang and Lee, 2003)
uses CCA in combination with Radon transform to
search for components with license plate properties
(size, aspect ratio). (Sborz et al., 2019) proposed li-
cense plate localization on FPGA. They use two mor-
phological operations and connected components la-
belling technique to find license plate candidates.
Template matching-based methods (Ha and Shak-
eri, 2016; Biyabani et al., 2015) use background sub-
traction and edge detection for candidate search. Can-
didates are then scanned for characters using template
matching. Other methods (Chhabra et al., 2016; Biya-
bani et al., 2015) use template matching to find license
plate candidates, and searches for characters in hori-
zontal and vertical projections of the license plate im-
ages.
Machine learning based methods for licence plate
detection typically use either SVM (Khalil and Kur-
niawan, 2014; Yang et al., 2011; Yuan et al., 2017),
cascade classifiers (Elbamby et al., 2016; Arth et al.,
2006) or Convolutional neural network(CNN)(Xie
et al., 2018; Chen and Wang, 2020; Gao et al., 2020;
WU et al., 2020). (Khalil and Kurniawan, 2014)
searches for candidate locations by horizontal and
vertical edge detection and classifies them by SVM
with co-occurrence matrix features. (Yang et al.,
2011) presented a hybrid FPGA-PC approach where
an image is filtered by chroma filter and gradient filter
on FPGA, and then SVM is applied on candidate po-
sitions on PC. (Yuan et al., 2017) also proposed adap-
tive thresholding, density filter and SVM with colour
saliency features.
(Arth et al., 2006) proposes a Haar cascade detec-
tor on DSP for detection of cars and license plates.
(Elbamby et al., 2016) uses cascade classifier with
Local Binary Patterns (LBP) features and prepro-
cesses the image by edge detection and morphol-
ogy filters. (Yousefi et al., 2019) use AdaBoost cas-
cade with LBP features for license plate detection and
background subtraction for non-moving areas elimi-
nation. They use linear regression for estimation of
size of detected plates. (Xie et al., 2018) use YOLO
(You only look once) method (Redmon et al., 2015)
based on CNN to multi-directional license plate de-
tection. (Chen and Wang, 2020) proposed a method
combing the CNN with broad learning system based
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
14

scaling
Figure 2: (left) Image scales and objects detected by the classifiers. (right) Final detections after non-maximum suppression.
The classifiers are color-coded, the yellow one detects license plates almost aligned, the green one detects slightly tilted
license plates.
on AdaBoost for license plate recognition. (Gao et al.,
2020) created CNN based encoder-decoder system
where encoder detects candidate license plate char-
acters and recognises them without considering the
format of the license plate. (WU et al., 2020) uses
colour segmentation, corner detection and morpho-
logical operations to select the operating area, and fi-
nally uses a convolutional neural network to get li-
cense plate area.
Generic object detector hardware architectures
have also been published, mostly demonstrated on
face detection (Cho et al., 2009; Kyrkou and
Theocharides, 2011; Zemcik et al., 2013; Said and
Atri, 2016; Musil et al., 2020), that could be applied
for detection of license plates. In most cases, they
implement Haar Cascades (Viola and Jones, 2004) or
SVM (Dalal and Triggs, 2005).
In this work, similarly to (Arth et al., 2006; El-
bamby et al., 2016), we propose statistical sliding
window detectors trained by the machine learning al-
gorithm. Such an approach is more robust than pure
image processing, such as in (Anagnostopoulos et al.,
2006; Zhai et al., 2011), since it easily adapts to visual
variability of data. The difference in our approach
from the other ones is that we use multiple detectors
tuned to various deformations of license plates in or-
der to boost the quality of detection. We use a large
artificially generated dataset of training examples and
propose an FPGA implementation of the detection
process on Xilinx Zynq platform. Our architecture is
based on (Musil et al., 2020) which provides excellent
speed/resource tradeoff. We evaluated the method on
a large image and video database obtained from in-
dustry.
To our knowledge, this work is the first to use
boosted classifiers for unconstrained detection of li-
cense plates directly in FPGA. Other works that ex-
poit FPGA use mostly segmentation or filtering ap-
proaches which are targeted for specific scenarios
(and usually fail in unconstraned detection). Recent
works employ mostly neural networks which are su-
perior in accuracy of detection but their implementa-
tion in FPGA is limited and expensive (Nguyen et al.,
2019; Wu et al., 2019) or they require specific hard-
ware (GPU, VPU) (Xie et al., 2018; Chen and Wang,
2020; Gao et al., 2020; WU et al., 2020).
3 LICENSE PLATE
LOCALIZATION
Our task is to detect license plates observed by a cam-
era and to localize them; see Figure 1 for example
images. The intended applications require high ac-
curacy of the detection result. At the same time, it
can tolerate a reasonable amount of false detections
(which can be filtered out later, for example, by the
license plate recognition process). Our license plate
detection algorithm is based on multiple independent
boosted classifiers, whose results are merged to get
the final results. Each of the classifiers captures li-
cense plates with a specific range of observed in-plane
rotations. We use constant soft cascade classifiers
(
ˇ
Sochman and Matas, 2005; Doll
´
ar et al., 2014) with
Local Binary Patterns (LBP) features (Zhang et al.,
2007; Zemcik et al., 2013). The detection process is
illustrated in Figure 2,
3.1 The Classifier
The classifier is a function H(x) which gives the con-
fidence value for an image patch x, formally defined
in Equation (1). During the detection process, every
location of the input image is analyzed by the classi-
fier. Multi-scale detection is solved by image scaling
by a fixed factor. The classifier H(x), is a sequence of
T weak classification functions (T = 512 in our ex-
periments), and its response on image window x is a
sum of predictions produced by the individual weak
classifiers. We use simple weak classifiers based on
Unconstrained License Plate Detection in Hardware
15
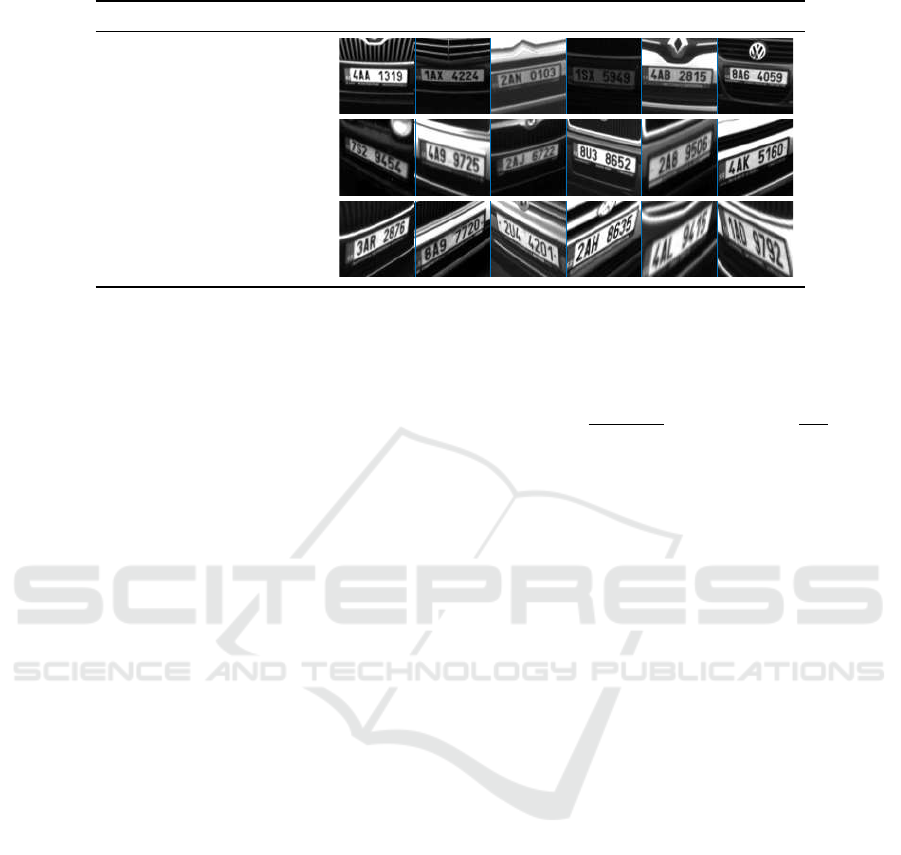
Table 2: Ranges of orientation and window sizes for three classifiers.
Range [
◦
] Window [px] LP images
0 < φ < 15 18×64
10 < φ < 30 22×56
25 < φ < 45 28×43
LBP features f and lookup tables A with the confi-
dence predictions.
H
t
(x) =
t
∑
i=1
A
i
( f
i
(x)) (1)
The detection process on an image I produces a
set of locations and sizes that were not rejected by the
classifier, Equation (2). Each candidate comprises of
its location x, y in the image, size w, h and confidence
score c (the classifier response on the image patch cor-
responding to the location).
H(I) =
{
(x, y, w, h, c)
}
(2)
An important property of soft cascade classifiers
is that the classification function H(x) can be ter-
minated after evaluating k-th weak classifier, when
H
k
(x) < θ
k
. Thresholds θ are trained, so that ma-
jority of background samples is rejected early in the
process. The computational complexity of the clas-
sifier dramatically decreases compared to the case of
evaluation of all T weak classifiers, and it can be eval-
uated as an average number of weak classifiers eval-
uated per image position nf (which is usually orders
of magnitude lower that T ). This value is especially
important as it directly influences the speed of the de-
tector in the FPGA implementation.
3.2 Detection with Multiple Classifiers
We propose to use n classifiers H =
n
H
(1)
, . . . , H
(n)
o
for the localization of license plates, each tuned for
LPs with specific range of rotation angle φ. Each clas-
sifier produces detections independently, and the final
set of candidates is obtained as a union of all candi-
dates (3). Final locations are produced by a simple,
overlap-based non-maxima suppression algorithm.
H (I) =
[
i
H
(i)
(I) (3)
Each detector is trained for a specific range of li-
cense plate angles φ. The range assigned to the k-th
classifier is,
max
45(k − 1)
n
− 5, 0)
< φ <
45k
n
,
where 45
◦
marks the upper limit of license plate ori-
entations. The classifier window aspect ratio is set
as a mean aspect ratio of license plates falling in the
range φ. The window size is set to constant area of
1024 pixels and 2 pixel margin is added. The ranges
and window sizes for n = 3 classifiers are summarized
in Table 2.
The number of classifiers in the ensemble H influ-
ences the accuracy and speed of the detection process.
One classifier can not capture all the variability of the
license plates, while more detectors are more accu-
rate but slower. This trend is shown in Figure 3. Two
classifiers give already reasonable detection rate and
sufficient speed. We observed that using more classi-
fiers results in better localization. Using more classi-
fiers, however, reduces speed, and for this reason, we
use three classifiers in our hardware implementation
(Section 4).
The training data we used is a broad set of license
plate images randomly transformed to match defor-
mations likely to occur in the target application, since
the scenario is often known and fixed, e.g. in case of
our vehicle-mounted camera. Few samples are shown
in Table 2. The advantage of such an approach is that
it can be automated and any number of training sam-
ples with precise ground truth (including orientation)
can be quite effortlessly generated for each applica-
tion case.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
16

# classifiers
1 2 3 4 5
Miss rate
0
0.05
0.1
(a)
# classifiers
1 2 3 4 5
nf
0
5
10
15
(b)
# classifiers
1 2 3 4 5
Speed [FPS]
0
50
100
(c)
Figure 3: Effect of the number of the classifiers on the detection. ((a)) Reduced miss rate, ((b)) higher computational com-
plexity and ((c)) lower frame rate. We choose to use 3 classifiers which is a good balance between detection accuracy, speed
and hardware requirements (see Section 4).
4 FPGA ARCHITECTURE
We implemented the LP detector on our hardware
camera platform based on SoC Xilinx Zynq XC
7Z020. The SoC contains two ARM CortexA9 cores
and FPGA interconnected through high-speed AMBA
AXI bus. The approach is, however, quite general
and can be applied to almost any Xilinx Zynq family
member and also to other platforms. In our case, the
platform is equipped with a low noise global shutter
CMOS image sensor Python1300 from ON Semicon-
ductor, which is attached directly to FPGA, forming
a smart camera. The sensor resolution is 1280×1024
pixels and it can capture up to 210 FPS.
Figure 4 shows the block diagram of the camera
with the detector integrated into it. As the minimum
size of the license plate needed to detect is approxi-
mately 100 pixels in width, we downscale the input
image to half resolution before the detection phase.
The image is passed to the detector block through
balancing FIFO that covers irregularities in the detec-
tor speed that depend on the image content and that
are hard to predict. The results of detection – loca-
tions of detected objects – are transmitted to ARM
CPU memory, along with the original image. On the
CPU, the detected license plates are tracked using the
Kalman filter. The camera outputs cropped license
plate images that are transmitted to the server for fur-
ther processing (OCR, storage, etc.).
The Detector block is based on (Musil et al.,
2020) which implements multi-scale soft cascade de-
tector with LBP (Zhang et al., 2007) or LRD features
(Hradi
ˇ
s et al., 2008). The engine works as a pro-
grammable automaton, using a sequence of feature
parameters as instructions. We modified the engine in
order to use three classifiers and adapted it to a more
recent platform with more resources and memory.
The engine works without external memory, stor-
ing only a narrow stripe of the image which is be-
ing stored and analyzed directly in BRAM inside the
FPGA. The stripe memory size is 4096×32 pixels in
32 BRAMs organized in a way that data for a fea-
Table 3: FPGA resource utilization.
BRAM LUT REG
Image acquisition 5 2559 4746
Balancing FIFO 4 115 210
Detector 38 9521 7099
Storage 5 3734 4785
Total 52 15938 16840
7Z020 res. 37 % 30 % 16 %
ture evaluation can be obtained in one clock cycle.
The stripe memory is filled from the CMOS, and the
scaled versions of the image are created on-the-fly;
the process is illustrated in Figure 4.
The classification function is executed overall po-
sitions in the stripe memory. The processing is heav-
ily pipelined, we use two pipelines of length 9, so up
to 18 positions are processed in parallel. The effi-
ciency of feature extraction is np = 1.75 features ex-
tracted in clock cycle. Overall performance in frames
per second, expressed by equation (4), is, in general,
dependent on the clock frequency f and the total num-
ber of features that must be calculated on an image
for all classifiers (i.e. the number of positions P times
the average number of features n f for each individual
classifier).
F =
f · np
∑
k
i=1
P
i
· n f
i
(4)
In this work we assume f = 200MHz; P
1
=
872487, P
2
= 899067, and P
3
= 915442; and n f
1
=
2.89, n f
2
= 3.23, and n f
3
= 2.78. The values of n f
were estimated on a testing set of 1522 images and
are valid for the experimental classifiers presented in
the Section 5. The estimated upper limit of perfor-
mance of the detection unit is therefore F = 48 FPS.
Table 3 summarizes resources required by the design.
The whole solution takes approximately one third of
resources of the 7Z020 FPGA which we use in our
solution.
Unconstrained License Plate Detection in Hardware
17
Image
correction
Scale
FIFO
Detector
DMA
VDMA
ARM
Memory
Data from
sensor
Stripe memory 4096x32 px
Scale + FIFO
Current line 640 px
Data from
sensor
6x6
5x5
Scaling
...
Figure 4: (Top) Block scheme of the camera prototype. (Bottom) The data from sensor are passed to a narrow image stripe
in memory. All scales are created automatically.
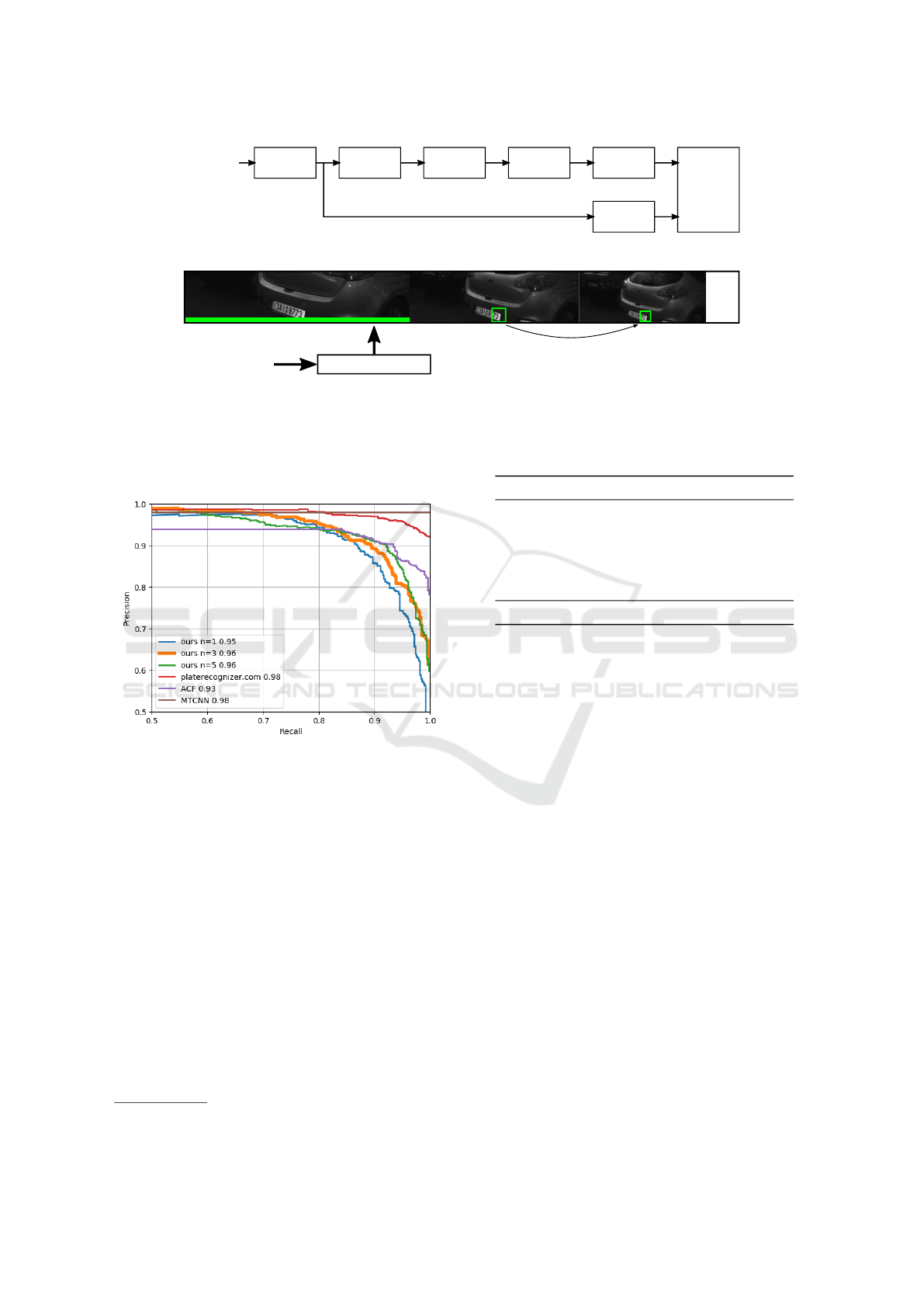
5 DETECTOR EVALUATION
Figure 5: Recall-Precision characteristics for the proposed
method (for different n) and comparison with other meth-
ods.
We evaluated the proposed method in two modes –
Single image mode and Tracking mode.
In the Single image mode we evaluate precision-
recall trade-off on a large number of testing images.
However, it is impossible to compare to other pub-
lished license plate detection methods (summarized in
Table 1) since they published results on different test-
ing datasets using different testing protocols. More-
over, none of them has available source code. For this
reasons, we compare our method to well known gen-
eral object detection methods – ACF (Doll
´
ar et al.,
2014) and MTCNN (Zhang et al., 2016), and a com-
mercial solution Plate Recognizer
1
. It must be how-
ever noted that none of them is targeted for FPGA
with all of its constraints (low memory, integer arith-
metic, etc.). MTCNN is a recent method based on
1
www.platerecognizer.com provides free REST API
Table 4: Tracking evaluation on testing sequences.
Seq. #tracked #missed #false Det. rate
1 197 1 59 0.995
2 103 1 43 0.990
3 101 5 15 0.953
4 181 1 26 0.995
5 205 3 23 0.986
6 53 0 2 1.000
Total 840 11 168 0.987
neural networks and it require PC/GPU platform.
Plate Recognizer internal structure was not published.
ACF is a method similar to ours since it shares a com-
mon classifier structure and the detection algorithm.
For the evaluation, we used our internal dataset of
1 522 images with 811 manually annotated license
plate bounding boxes. The results are summarized in
Figure 5. Not surprisingly, MTCNN and the com-
mercial solution give almost perfect results. ACF is
comparable to our method in terms of recall but with
higher precision. The results for our method show
that a single classifier already gives reasonable results
and adding more classifiers tuned to different trans-
formations further improves them (see also Figure 3).
Our method can reach recall over 95% with preci-
sion around 0.8, and recall 98% with precision 0.7
which is sufficient for real-world applications. In
the Tracking mode, we detect and track LPs in video
sequences and evaluate the detection rate. We used a
simple tracker based on Kalman filter. In the evalua-
tion, we required each license plate to be hit at least
once in sequence. From the application point of view,
the Tracking mode is more important. In the test,
we use six sequences, each approximately 10 min-
utes long taken at ten frames per second. The tracking
accuracy is summarized in Table 4. The total detec-
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
18

26.61
44.32
28.85
52.43
39.6
47.89
31.95
47.55
15.94
38.39
61.11
39.28
Figure 6: (top) Examples of detected license plates and detector responses. (bottom) Missed license plates (annotations
marked by red).
tion rate 98.7 %. Missed license plates are in most
cases, those with extreme deformations or very dirty,
false alarms are license plate-like patterns in the im-
age (various signs, etc.), see Figure 6 for a few exam-
ples.
6 CONCLUSIONS
We presented a method for reliable real-time detec-
tion and localization of license plates observed from
a moving vehicle, and its FPGA implementation suit-
able for integration into a smart camera. Our solu-
tion is unique, since it uses machine learning-based
detection method, it does not require external mem-
ory, and enables for real-time frame rates on low-end
FPGA. In this paper, we focused on the detection of
license plates. However, the method is more general
and can be adapted for detection of other objects too.
The proposed solution is capable of handling complex
projections of the license plates, such as deformations
caused by perspective projection, scaling, and rota-
tions. The proposed solution uses multiple, in our
case three, classifiers to ensure the quality of the re-
sults while keeping the performance high. The classi-
fiers are based on simple LBP features which makes it
easy to implement them in FPGA. We demonstrated
that our hardware solution could process 1280×1024
pixel frames at over 40 FPS while taking only a frac-
tion of resources of low-end FPGA (Zynq Z7020).
The accuracy of detection measured on the real-world
data is 98 % and 98.7 % when combined with track-
ing, while producing only a modest amount of false
detections.
Future work includes further efficiency improve-
ments, investigation of dependency of quality on free-
dom of projection of images and sampling of the im-
age frames, and possibly also exploitation of other
features and detection mechanisms including hybrid
approach with neural networks.
ACKNOWLEDGEMENTS
This work is part of the FitOptiVis project funded
by the ECSEL Joint Undertaking under grant number
H2020-ECSEL-2017-2-783162.
REFERENCES
Anagnostopoulos, C. N. E., Anagnostopoulos, I. E.,
Loumos, V., and Kayafas, E. (2006). A license
plate-recognition algorithm for intelligent transporta-
tion system applications. IEEE Transactions on Intel-
ligent Transportation Systems, 7(3):377–392.
Arth, C., Bischof, H., and Leistner, C. (2006). TRICam –
an embedded platform for remote traffic surveillance.
In 2006 Conference on Computer Vision and Pattern
Recognition Workshop (CVPRW’06), pages 125–125.
Biyabani, A. A., Al-Salman, S. A., and Alkhalaf, K. S.
(2015). Embedded real-time bilingual alpr. In Com-
munications, Signal Processing, and their Applica-
tions (ICCSPA).
Unconstrained License Plate Detection in Hardware
19

Chen, C. L. P. and Wang, B. (2020). Random-positioned
license plate recognition using hybrid broad learning
system and convolutional networks. IEEE Transac-
tions on Intelligent Transportation Systems, pages 1–
13.
Chhabra, S., Jain, H., and Saini, S. (2016). Fpga based
hardware implementation of automatic vehicle license
plate detection system. In 2016 International Con-
ference on Advances in Computing, Communications
and Informatics (ICACCI), pages 1181–1187.
Cho, J., Mirzaei, S., Oberg, J., and Kastner, R. (2009).
Fpga-based face detection system using haar classi-
fiers. In FPGA.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In CVPR.
Doll
´
ar, P., Appel, R., Belongie, S., and Perona, P. (2014).
Fast feature pyramids for object detection. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 36(8):1532–1545.
Elbamby, A., Hemayed, E. E., Helal, D., and Rehan, M.
(2016). Real-time automatic multi-style license plate
detection in videos. In Computer Engineering Con-
ference (ICENCO).
Gao, F., Cai, Y., Ge, Y., and Lu, S. (2020). Edf-lpr: a new
encoder decoder framework for license plate recogni-
tion. IET Intelligent Transport Systems, 14(8):959–
969.
Ha, P. S. and Shakeri, M. (2016). License plate automatic
recognition based on edge detection. In 2016 Artificial
Intelligence and Robotics (IRANOPEN), pages 170–
174.
Hradi
ˇ
s, M., Herout, A., and Zemcik, P. (2008). Local
rank patterns - novel features for rapid object detec-
tion. In Proceedings of International Conference on
Computer Vision and Graphics 2008, Lecture Notes
in Computer Science, pages 1–2.
Hsu, G., Chen, J., and Chung, Y. (2013). Application-
oriented license plate recognition. IEEE Transactions
on Vehicular Technology, 62(2):552–561.
Jeffrey, Z. and Ramalingam, S. (2012). High definition li-
cence plate detection algorithm. In Southeastcon.
Khalil, M. S. and Kurniawan, F. (2014). License plate detec-
tion method for real-time video of low-cost webcam
based on hybrid svm-heuristic approach. In Informa-
tion Technology: New Generations (ITNG).
Kyrkou, C. and Theocharides, T. (2011). A flexible paral-
lel hardware architecture for adaboost-based real-time
object detection. In VLSI Systems.
Mai, V., Miao, D., Wang, R., and Zhang, H. (2011). An im-
proved method for vietnam license plate location. In
2011 International Conference on Multimedia Tech-
nology, pages 2942–2946.
Musil, P., Jur
´
anek, R., Musil, M., and Zem
ˇ
c
´
ık, P. (2020).
Cascaded stripe memory engines for multi-scale ob-
ject detection in fpga. IEEE Transactions on Circuits
and Systems for Video Technology, 30(1):267–280.
Nguyen, D. T., Nguyen, T. N., Kim, H., and Lee, H. (2019).
A high-throughput and power-efficient fpga imple-
mentation of yolo cnn for object detection. IEEE
Transactions on Very Large Scale Integration (VLSI)
Systems, 27(8):1861–1873.
Redmon, J., Divvala, S. K., Girshick, R. B., and Farhadi, A.
(2015). You only look once: Unified, real-time object
detection. CoRR, abs/1506.02640.
Said, Y. and Atri, M. (2016). Efficient and high-
performance pedestrian detector implementation for
intelligent vehicles. IET Intelligent Transport Sys-
tems, 10(6):438–444.
Sborz, G. A. M., Pohl, G. A., Viel, F., and Zeferino, C. A.
(2019). A custom processor for an fpga-based plat-
form for automatic license plate recognition. In 2019
32nd Symposium on Integrated Circuits and Systems
Design (SBCCI), pages 1–6.
Silva, S. M. and Jung, C. R. (2018). License plate detection
and recognition in unconstrained scenarios. In 2018
European Conference on Computer Vision (ECCV),
pages 580–596.
Viola, P. and Jones, M. J. (2004). Robust real-time face
detection. IJCV.
ˇ
Sochman, J. and Matas, J. (2005). WaldBoost – learning for
time constrained sequential detection. In CVPR.
Wang, S.-Z. and Lee, H.-J. (2003). Detection and recog-
nition of license plate characters with different ap-
pearances. In Proceedings of the 2003 IEEE Interna-
tional Conference on Intelligent Transportation Sys-
tems, volume 2, pages 979–984 vol.2.
Wu, D., Zhang, Y., Jia, X., Tian, L., Li, T., Sui, L., Xie, D.,
and Shan, Y. (2019). A high-performance cnn proces-
sor based on fpga for mobilenets. In 2019 29th In-
ternational Conference on Field Programmable Logic
and Applications (FPL), pages 136–143.
WU, X., QIU, J., and QIU, A. (2020). An efficient li-
cense plate location algorithm based on deep leaming.
In 2020 International Conference on Computer Engi-
neering and Application (ICCEA), pages 543–546.
Xie, L., Ahmad, T., Jin, L., Liu, Y., and Zhang, S. (2018).
A new cnn-based method for multi-directional car li-
cense plate detection. IEEE Transactions on Intelli-
gent Transportation Systems, 19(2):507–517.
Yang, S. Y., Lu, Y. C., Chen, L. Y., and Cherng, D. C.
(2011). Hardware-accelerated vehicle license plate
detection at high-definition image. In 2011 First In-
ternational Conference on Robot, Vision and Signal
Processing, pages 106–109.
Yousefi, E., Nazem Deligani, A. H., Jafari Amirbandi, J.,
and Karimzadeh Kiskani, M. (2019). Real-time scale-
invariant license plate detection using cascade classi-
fiers. In 2019 IEEE Conference on Multimedia Infor-
mation Processing and Retrieval (MIPR), pages 399–
402.
Yuan, Y., Zou, W., Zhao, Y., Wang, X., Hu, X., and Ko-
modakis, N. (2017). A robust and efficient approach
to license plate detection. IEEE Transactions on Im-
age Processing, 26:1102 – 1114.
Zemcik, P., Juranek, R., Musil, P., Musil, M., and Hradis,
M. (2013). High performance architecture for object
detection in streamed videos. In Field Programmable
Logic and Applications (FPL).
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
20

Zhai, X., Bensaali, F., and Ramalingam, S. (2011). Real-
time license plate localisation on fpga. In CVPR 2011
WORKSHOPS, pages 14–19.
Zhang, K., Zhang, Z., Li, Z., and Qiao, Y. (2016). Joint
face detection and alignment using multitask cascaded
convolutional networks. IEEE Signal Processing Let-
ters, 23(10):1499–1503.
Zhang, L., Chu, R., Xiang, S., Liao, S., and Li, S. Z. (2007).
Face detection based on multi-block lbp representa-
tion. In ICB.
Unconstrained License Plate Detection in Hardware
21
