
Fast Bridgeless Pyramid Segmentation for Organized Point Clouds
Martin Madaras
1,2 a
, Martin Stuchl
´
ık
1 b
and Mat
´
u
ˇ
s Tal
ˇ
c
´
ık
1,3 c
1
Skeletex Research, Slovakia
2
Faculty of Mathematics, Physics and Informatics, Comenius University Bratislava, Slovakia
3
Masaryk University Brno, Czech Republic
Keywords:
Point Cloud, Segmentation, Parallel, Pyramid, GPU, CUDA.
Abstract:
An intelligent automatic robotic system needs to understand the world as fast as possible. A common way to
capture the world is to use a depth camera. The depth camera produces an organized point cloud that later
needs to be processed to understand the scene. Usually, segmentation is one of the first preprocessing steps
for the data processing pipeline. Our proposed pyramid segmentation is a simple, fast and lightweight split-
and-merge method designed for depth cameras. The algorithm consists of two steps, edge detection and a
hierarchical method for bridgeless labeling of connected components. The pyramid segmentation generates
the seeds hierarchically, in a top-down manner, from the largest regions to the smallest ones. The neighboring
areas around the seeds are filled in a parallel manner, by rendering axis-aligned line primitives, which makes
the performance of the method fast. The hierarchical approach of labeling enables to connect neighboring
segments without unnecessary bridges in a parallel way that can be efficiently implemented using CUDA.
1 INTRODUCTION
The world is moving towards automation. Robots are
picking parts from trays to assemble larger compo-
nents, cars can park themselves and cruise on high-
ways and 3D printers are self-correcting printing mis-
takes. All these applications are based on machines
understanding the surrounding world. One of the
principles is to determine where and what kind of ob-
jects are positioned in the space around the machine.
This is traditionally done by a depth camera and sub-
sequent processing of the input point clouds. When
capturing a stream of organized point clouds from a
3D camera, we need to process the stream of data
as fast as possible. The captured point cloud is im-
mediately processed by an image processing pipeline,
where segmentation is one of the most important pro-
cessing steps. The segmented point cloud is used as
an input to following processing algorithms and thus
the segmentation is used for the input data reduction.
Because the scanning artifacts result in bridges in the
thresholded pseudo-curvature metrics, it is not possi-
ble to use methods based on thresholding the metrics
a
https://orcid.org/0000-0003-3917-4510
b
https://orcid.org/0000-0001-8556-8364
c
https://orcid.org/0000-0002-3865-4507
and flood-filling directly. Furthermore, segmentation
methods based on hierarchical clustering cannot be
efficiently implemented in a parallel way. The follow-
ing algorithm in the processing pipeline is performed
only using the subset of the input point cloud that is
needed for the optimal performance of the algorithm.
Therefore, efficiency and low execution time of the
segmentation process is crucial in all these robotics
applications.
The main contribution of the paper is a novelty
hierarchical parallel filling method that was designed
for fast pyramid segmentation of organized point
clouds (or directly depth maps with computed nor-
mal approximations). The proposed two-step method
modifies the region filling algorithms such as a water-
shed or connected component labeling, into a fast and
robust method that fills the regions bridgelessly. The
filling is bridgeless even if the segmentation metrics
contains bridges between the regions after the thresh-
olding (bridges can be seen in Figure 1 and Section
3.3). The proposed method is directly applied on a
pseudo-curvature metrics computed from a set of in-
put organized point clouds captured by a 3D scanner.
The segmentation results are evaluated qualitatively
and the processing times are quantitatively compared
with other state of the art filling methods, bench-
marked on different CUDA compatible hardware.
Madaras, M., Stuchlík, M. and Tal
ˇ
cík, M.
Fast Bridgeless Pyramid Segmentation for Organized Point Clouds.
DOI: 10.5220/0010163802050210
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 4: VISAPP, pages
205-210
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
205

Figure 1: An input organized point cloud with estimated normals (left) is segmented into a set of regions where the region
boundaries are created either by high curvature or high depth differences, from which a segmentation metrics is calculated. The
pyramid segmentation starts by thresholding the metrics on different levels and constructing the label seeds in a hierarchical
way (middle). The seeds start to spawn from the largest areas on the highest level of the pyramid and they fill the regions
by adding smaller seeds on lower levels. The hierarchical spawning of the seeds enables to eliminate the unwanted bridges
between the individual components. The final bridgeless segmentation is shown on the right side, where the problematic areas
in the segmentation and the bridges in the thresholded metrics are marked by blue circles.
2 RELATED WORK
Existing algorithms for the segmentation of images
and structured point clouds can be divided into two
main groups, graph-based algorithms, and two-step
labeling algorithms. The graph-based algorithms
use a graph structure (Golovinskiy and Funkhouser,
2009) to iteratively merge over-segmented (Ben-
Shabat et al., 2017) image from previous itera-
tion steps. The algorithms usually start with one-
pixel regions (Felzenszwalb and Huttenlocher, 2004).
Due to hierarchical order of the performed merg-
ing steps, the parallelization on GPU cannot be per-
formed effectively enough to process 3-megapixel
depth camera scans in real-time (Abramov et al.,
2010). Some methods are based on pre-generation of
super-pixels (Lin et al., 2017; Fulkerson and Soatto,
2012; Achanta et al., 2012), that can be merged
more effectively, however the segment boundaries
do not match real interface between the objects. In
(Cheng et al., 2016), the authors used a hierarchi-
cal feature selection to merge the initial super-pixel
over-segmentation, which might result in wrong seg-
mentation if the initial super-pixels are not precise.
Two-step labeling algorithms first start with the edge
detection step. Subsequently, the regions between
edges are filled with labels using watershed method
or connected component labeling algorithm (CCL)
(Ma et al., 2008). Computation of both steps can
be effectively parallelized (Allegretti et al., 2018; Al-
legretti et al., 2020), however the unwanted bridges
in the metrics are still the problem (see an exam-
ple of the computed metrics in Figure 2, right). An
extensive search for an efficient way to perform la-
bel distribution among neighbors in parallel has been
made in (Hawick et al., 2010). Later, more advanced
approaches focusing on optimized, hardware speci-
fied CUDA implementation have been proposed by
(Stava and Benes, 2011) and (Nina Paravecino and
Kaeli, 2014). An extensive evaluation on GPU CCL
approaches and block-based methods can be found
in (Asad et al., 2019). All the mentioned CCL ap-
proaches, with both CPU and GPU implementations,
share the same property that is unsuitable for our
case. The labeling results contain bridges between
segments that cause an intensive under-segmentation
(see Figure 3).
3 PYRAMID SEGMENTATION
To perform an efficient two-step labeling algorithm
resulting in segmentation of the organized point cloud
(or depth map), the input needs to be processed by
computing the metrics and filling the regions between
boundaries in a parallel way. The pyramid segmenta-
tion is based on hierarchical seed spawning that was
inspired by a mipmap creation. The boundaries of the
thresholded metrics contain bridges and therefore, to
avoid under-segmentation, we construct the seeds in a
hierarchical manner and use the hierarchical informa-
tion to avoid the regions to overflow into neighboring
parts. If two seeds with different labels meet within
the bridge, according to the hierarchy level of the cur-
rently generated seed we know the size of the bridge.
By using the information about the bridge size, the
decision about seed merging can be made. In our ap-
proach, an input for the metrics calculation is an or-
ganized point cloud with estimated per point normals.
The normals can be estimated either in camera-space
(see Figure 1) or in calibration marker-space (see Fig-
ure 2). The 8-neighborhood of a point is defined ex-
plicitly by iterating the one-ring in the grid structure
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
206

of the organized point cloud. Using the input, the met-
rics for region boundaries estimation is calculated and
thresholded first and the initial seed spawns are cre-
ated inside the regions. Next levels of the labels in the
hierarchy are added iteratively, and the final labeling
is performed in an efficient line filling way inspired
by (Hemmat et al., 2015).
3.1 Metrics Calculation
In order to find the boundaries between individual
scanned objects, we need to distinguish the interface
between the objects based on derivatives of available
per-point attributes in the input data; in the case of
point clouds captured by 3D scanners these avail-
able attributes are local curvature and local depth
derivatives. The segmentation metrics calculation is
based on the thresholding of two terms, a pseudo-
curvature term, and a depth-difference term. The
first term, the pseudo-curvature c
i
is calculated as the
normalized sum of dot products between the point
normal and all the normals in the 8-neighborhood
(c
i
= arccos(
∑
j∈8neigh
n
i
·n
j
8.0
), where n
i
is the normal of
the point and n
j
is the normal of the neighbor in the
8-neighborhood of the point). The second term, the
depth-difference d
i
, is the difference of the maximal
and the minimal differences in depth of neighbour-
ing points in the 8-neighborhood around the given
point (d
i
= max
j∈8neigh
dd
i j
− min
j∈8neigh
dd
i j
, where
dd
i j
is the absolute depth difference in millimeters be-
tween point with index i and point with index j). Fi-
nally, these two terms are thresholded by thresholds ct
and dt in order to produce the final metrics (see Fig-
ure 2, right) that will be filled in the next step of the
algorithm (see Figure 1, right).
Figure 2: (Left) the input point cloud with normals and
(right) computed and thresholded metrics resulting in the
edges.
3.2 Pyramid Filling
The computed metrics is converted into a binary im-
age using different level thresholds in the first step.
Next, a pyramid of mipmaps is constructed (depicted
in Figure 1, middle), where the lowest resolution cor-
responds to the highest pyramid level while the orig-
inal binary image defines the lowest pyramid level.
When constructing a pyramid level, the value for a
texel is equal to zero if any of the values of four corre-
sponding texels from higher resolution pyramid level
is equal to zero. Otherwise, texel is labeled with a
value defined as fillable. After the pyramid is con-
structed, the algorithm runs through the pyramid from
the lowest to the original resolution. For each pyra-
mid level, texels marked as fillable are labeled using
a value from lower resolution or a new unique label,
if the corresponding texel in a higher pyramid level is
not labeled and adding new labels at the current level
is enabled.
After labels are initialized, an iterative flood-fill
algorithm is deployed to ensure that texels with higher
values (or some unlabeled fillable texels) are relabeled
by their lower-valued neighbors. For shorter execu-
tion time, the flood-fill algorithm is run in rows and
columns, using 4-neighborhood. At the lowest pyra-
mid level, labels may fill an area one texel behind zero
labeled texels, as long as the edge detection step pro-
duces edges at least two texels wide.
Figure 3: (Left) the computed metrics is filled using CCL
and (right) the computed metrics is filled using our hierar-
chical bridgeless algorithm (using Scan03 and default pa-
rameters ct = 0.25, dt = 10).
3.3 Handling Bridges
Creating the segment boundaries by thresholding the
metrics often produces various small discontinuities
at detected edges, which we call bridges in the con-
text of this paper. The bridges are defined as artifacts
in the computed metrics creating possible flood fill
paths. In the optimal segmentation result without the
artifacts, these possible flood fill paths should be cut
into different regions. By using simple CCL, even
the smallest bridge creates a connection between two
neighboring segments, which can lead to an intensive
under segmentation (see Figure 3, left). In contrast to
the CCL, the pyramid filling has some additional in-
formation about labels. By knowing the pyramid level
the label was created in, we can decide which segment
is (at least partly) wide enough to be sampled by a
given pyramid level. This allows rough approxima-
tion of minimal cuts between neighboring segments,
using a very simple heuristic (the comparison can be
seen in Figure 3). If there are two labels created in
Fast Bridgeless Pyramid Segmentation for Organized Point Clouds
207
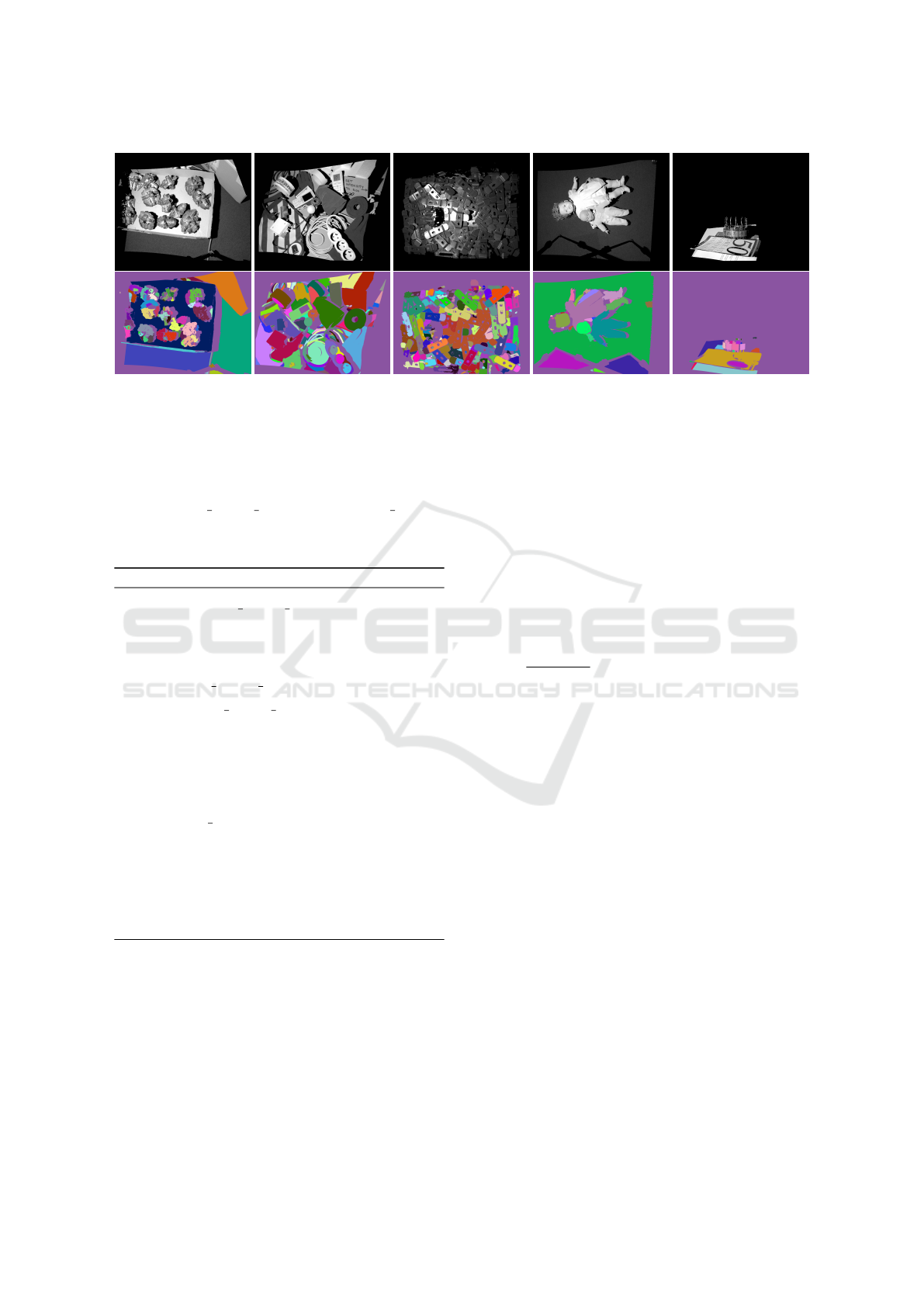
Figure 4: (Top) point clouds (Scan01 to Scan05) captured by Photoneo PhoXi 3D scanners that are used for the computation
time benchmark. (Bottom) results of pyramid segmentation using default parameters ct = 0.25, dt = 10.
one of the higher levels which were not joined in mul-
tiple previous levels a possible cut approximation is
detected. Let’s define a constructed pyramid P with
N levels indexed from 1 (highest level) to N (lowest
level). Let min bridge level and un joinable level be
pyramid level indices from 1 to N − 1. Then the algo-
rithm follows the following pseudocode:
Algorithm 1: Hierarchical Pyramid Segmentation.
1. for i in < 1,min bridge level >:
Initialize level[i] labels (addition of new labels is
enabled).
2. Run iterative flood-fill to join neighbouring labels
at level[min bridge level].
3. for i in < min bridge level + 1,N − 1 >:
Initialize level[i] labels (addition of new labels is
disabled).
4. Run flood-fill algorithm to join neighboring la-
bels at level[N − 1] (if both neighboring la-
bels were created in a level less or equal to
un joinable level, relabelling of higher value is
disabled).
5. Initialize level[N] labels (addition of new labels is
disabled).
6. Run one iteration of flood-fill (labeled texels are
filled only, relabeling of labeled ones is disabled).
4 CUDA IMPLEMENTATION AND
OPTIMIZATION
All passes of the algorithm can be directly translated
to CUDA code. However, two of the main passes,
metric calculation and flood-fill, will be slowed down
by inefficient memory accesses.
In the metric calculation pass, each pixel is read
multiple times from the global memory. The duplicity
of loading from global memory is reduced by using
blocks of threads arranged in a 2D grid. A respective
2D tile of pixels including the border is loaded into
the shared memory in order to be processed. In the
flood-fill pass, naive use of one thread per row results
in non-coalesced accesses to the memory. To avoid
this, threads are grouped into blocks that flood-fill
their rows simultaneously. A block of threads always
loads a 2D tile of pixels in a coalesced manner into the
shared memory, processes them and then stores them
into global memory the same way. The process is re-
peated
width
tile/blocksize
times. The benchmarking showed
that for our GPUs the suitable number of threads per
block is 32 and the width of the tile is 32 as well,
therefore a tile loaded is 32x32 in size. The opti-
mization was performed for Nvidia Tegra TX1 and
TX2 processors, resulting in 32 block size. For clas-
sic modern desktop GPUs, a larger block size might
result in higher performance, however this optimiza-
tion oriented on standard GPUs was out of the scope
of our research.
5 COMPARISON AND
EVALUATION
A comparison of our proposed method to other seg-
mentation methods was performed on the same scans
and the same hardware (Scan01 and Nvidia GTX
1050 Ti was used). When compared to graph-based
methods, the CPU computation time of these meth-
ods is in seconds and it cannot be directly imple-
mented in parallel on GPU. For comparison with
other parallel GPU implementations of filling meth-
ods, the CCL (Hawick et al., 2010) CUDA imple-
mentation of the fastest test label-equivalence takes
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
208
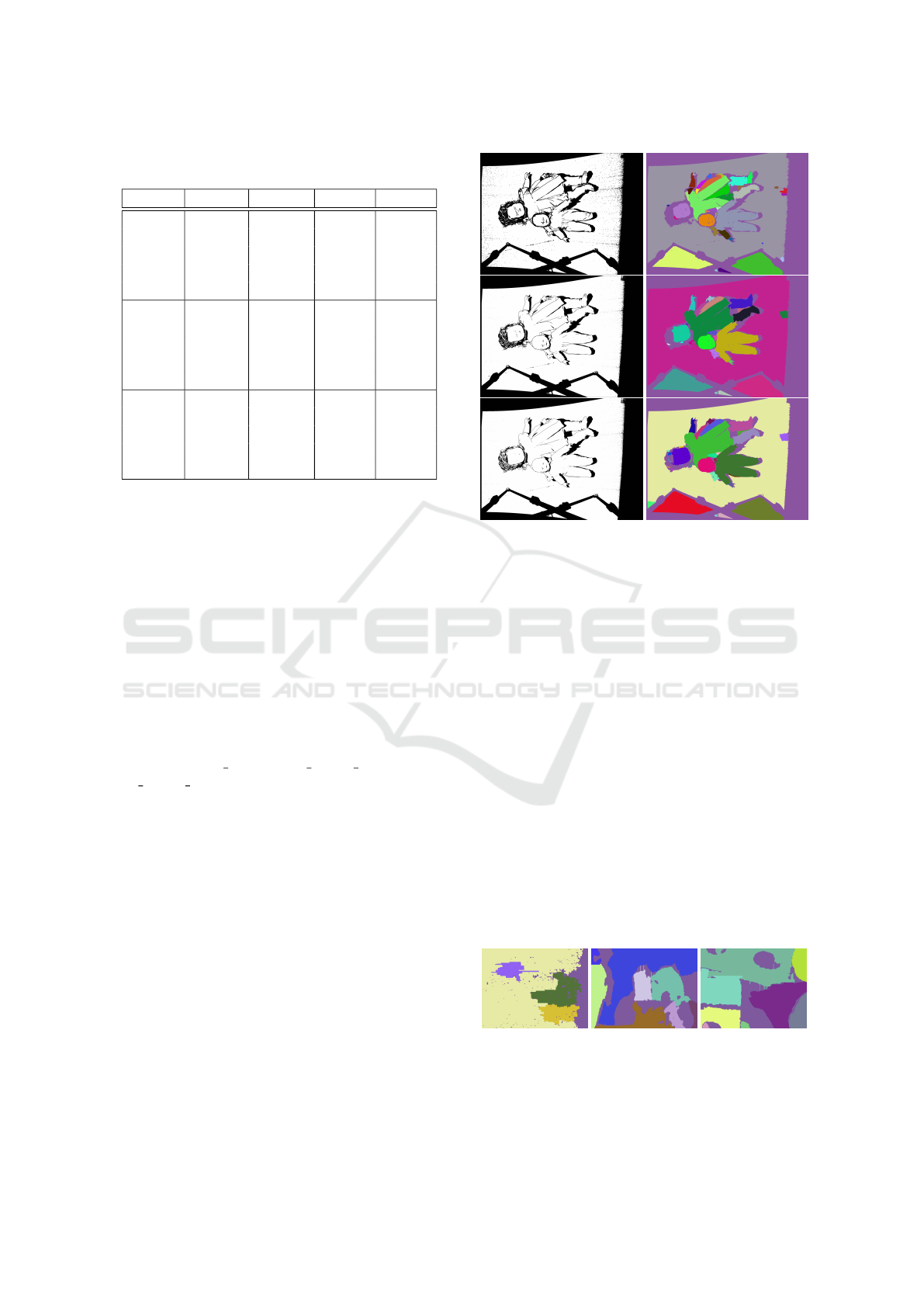
Table 1: Execution times in [ms] on Nvidia Tegra TX1, TX2
and GeForce GTX 1050 Ti GPU for organized point clouds.
Device Scan Metrics Segm. Total
TX1
Scan01 16.70 192.00 208.70
Scan02 14.60 224.00 238.60
Scan03 18.70 138.00 156.70
Scan04 13.13 159.00 172.13
Scan05 5.54 101.00 106.54
TX2
Scan01 12.10 69.25 81.35
Scan02 10.40 73.21 83.62
Scan03 13.50 56.59 70.09
Scan04 10.40 54.09 64.50
Scan05 3.96 50.94 54.90
1050Ti
Scan01 1.30 15.83 17.13
Scan02 1.25 19.72 20.97
Scan03 1.29 15.22 16.51
Scan04 1.29 16.54 17.83
Scan05 0.90 11.94 12.84
35.8ms in average, the quick-shift CUDA implemen-
tation (Fulkerson and Soatto, 2012) takes 341ms and
watershed GPU implementation (K
¨
orbes et al., 2011)
takes 3018ms on Nvidia GTX 1050 Ti GPU for the
same input 3-megapixel point clouds. Our method is
faster (see Table 1) in comparison to other segmenta-
tion methods (50fps on GTX 1050 Ti), and it is able
to avoid small bridges between segments.
The visualization of the scans from Table 1 can
be seen in Figure 4. All the scans are with di-
mensions 2064 x 1544 captured by Photoneo PhoXi
structured light scanner (Photoneo, 2017). The pyra-
mid is constructed similarly to standard mipmaps
and depends only on the resolution of the input
scanned image. The experiments showed that op-
timal un joinable level is min bridge level − 2 and
min bridge level can be equal to N − 2 for most
datasets or to N − 3 for complicated datasets with
many bridges. The segmentation metrics based on the
depth and curvature is controlled by a pair of thresh-
old parameters ct, dt which different settings result
into a unique segmentation configuration. By chang-
ing the threshold parameters ct, dt for thresholding
the pseudo-curvature term and the depth-difference
term, some edges might completely disappear from
the thresholded metrics as can be seen in Figure 5.
Thus, we were not able to evaluate the segmen-
tation results quantitatively. However, a qualitative
comparison of thresholded metrics filled using CCL
and our bridgeless approach can be seen in Fig-
ure 2. The quality metrics for segmentation eval-
uation depends on the use case of the processing
pipeline. In the robotics applications, where segmen-
tation is used, an over-segmentation is better than
under-segmentation. Thus, default values for the seg-
Figure 5: (Left) a computed metrics for the Scan04 where
the thresholding of the scan noise on different levels makes
a noticeable difference in the resulting edges. (Right) its
segmentation results mapped to scattered colors, with cur-
vature thresholds and distance thresholds (ct and dt) set to
0.15 and 1, 0.25 and 4, 0.35 and 10 (top to bottom).
mentation parameters ct and dt were empirically set
0.25 and 10, respectively. The best set of hyperpa-
rameters for our type of data was found experimen-
tally, they can be easily found for other 3D scanner
data with different resolution.
5.1 Limitations
The pyramid segmentation was designed to speed up
complex vision algorithms, where speed is prioritized
more than high-quality results. Rough pyramid ap-
proximations of minimal cuts may not be optimal and
can often be rectangularly jagged, while line based
filling can also introduce some small boundary ar-
tifacts (see Figure 6). The amount of artifacts usu-
ally correlates with data noise, which complicates the
edge detection and consequently the whole filling.
Figure 6: Our line filling approximation might result in
jagged boundary artifacts in locations, where the noise is
presented. The artifacts can be seen as lines that stick out
of the region boundaries, as depicted in the zoomed areas of
the scans.
Fast Bridgeless Pyramid Segmentation for Organized Point Clouds
209

We opted for a non-data-driven method for sev-
eral reasons. The main reason is missing data for the
training process. The data coming from the 3D scan-
ner have severe noise and we are not able to generate
synthetic ground truth labeled datasets for our struc-
tured light 3D scanners in an automatic way. Simulat-
ing a synthetic dataset for a structured light scanner
is non-trivial since it requires thorough capturing of
the scanning artifacts e.g. lens distortion, laser inter-
reflections, etc. As a result, while data-driven ap-
proaches can achieve very good results they are hard
to generalize to different scanning devices and their
specific reconstruction artifacts.
6 CONCLUSION
In this paper, a fast parallel method for image segmen-
tation has been proposed. The algorithm consists of
two steps, edge detection and hierarchical method for
labeling. Therefore, by using an alternative edge de-
tection algorithm, the pyramid segmentation may be
easily applicable to any other image data. The com-
ponent filling is a hierarchical approach that approxi-
mates the standard watershed and connected compo-
nent labeling algorithms. These algorithms are de-
signed for parallel implementation while hierarchical
seed spawning enables the removal of the unwanted
bridges between neighboring segments. The method
is suitable for real-time processing of the data cap-
tured by depth cameras and direct integration into var-
ious image processing, robotics, and computer vision
pipelines.
REFERENCES
Abramov, A., Kulvicius, T., W
¨
org
¨
otter, F., and Dellen, B.
(2010). Facing the multicore-challenge. chapter Real-
time Image Segmentation on a GPU, pages 131–142.
Springer-Verlag, Berlin, Heidelberg.
Achanta, R., Shaji, A., Smith, K., Lucchi, A., Fua, P., and
Susstrunk, S. (2012). Slic superpixels compared to
state-of-the-art superpixel methods. IEEE Trans. Pat-
tern Anal. Mach. Intell., 34(11):2274–2282.
Allegretti, S., Bolelli, F., Cancilla, M., and Grana, C.
(2018). Optimizing gpu-based connected components
labeling algorithms. In 2018 IEEE International Con-
ference on Image Processing, Applications and Sys-
tems (IPAS), pages 175–180.
Allegretti, S., Bolelli, F., and Grana, C. (2020). Optimized
block-based algorithms to label connected compo-
nents on gpus. IEEE Transactions on Parallel and
Distributed Systems, 31(2):423–438.
Asad, P., Marroquim, R., and e. L. Souza, A. L. (2019). On
gpu connected components and properties: A system-
atic evaluation of connected component labeling al-
gorithms and their extension for property extraction.
IEEE Transactions on Image Processing, 28(1):17–
31.
Ben-Shabat, Y., Avraham, T., Lindenbaum, M., and Fischer,
A. (2017). Graph based over-segmentation methods
for 3d point clouds. Computer Vision and Image Un-
derstanding, 174:12–23.
Cheng, M.-M., Liu, Y., Hou, Q., Bian, J., Torr, P., Hu, S.-
M., and Tu, Z. (2016). Hfs: Hierarchical feature se-
lection for efficient image segmentation. In Leibe, B.,
Matas, J., Sebe, N., and Welling, M., editors, Com-
puter Vision – ECCV 2016, pages 867–882, Cham.
Springer International Publishing.
Felzenszwalb, P. F. and Huttenlocher, D. P. (2004). Efficient
graph-based image segmentation. Int. J. Comput. Vi-
sion, 59(2):167–181.
Fulkerson, B. and Soatto, S. (2012). Really quick shift:
Image segmentation on a gpu. In Kutulakos, K. N.,
editor, Trends and Topics in Computer Vision, pages
350–358, Berlin, Heidelberg. Springer Berlin Heidel-
berg.
Golovinskiy, A. and Funkhouser, T. (2009). Min-cut based
segmentation of point clouds. In IEEE Workshop on
Search in 3D and Video (S3DV) at ICCV.
Hawick, K. A., Leist, A., and Playne, D. P. (2010). Par-
allel graph component labelling with gpus and cuda.
Parallel Comput., 36(12):655–678.
Hemmat, H. J., Pourtaherian, A., Bondarev, E., and de With,
P. H. N. (2015). Fast planar segmentation of depth im-
ages. In Image Processing: Algorithms and Systems.
K
¨
orbes, A., Vitor, G. B., de Alencar Lotufo, R., and Fer-
reira, J. V. (2011). Advances on watershed process-
ing on GPU architecture. In Mathematical Morphol-
ogy and Its Applications to Image and Signal Pro-
cessing - 10th International Symposium, ISMM 2011,
Verbania-Intra, Italy, July 6-8, 2011, pages 260–271.
Lin, X., Casas, J. R., and Pard
`
as, M. (2017). 3d point cloud
segmentation using a fully connected conditional ran-
dom field. 2017 25th European Signal Processing
Conference (EUSIPCO), pages 66–70.
Ma, N., Bailey, D. G., and Johnston, C. T. (2008).
Optimised single pass connected components anal-
ysis. 2008 International Conference on Field-
Programmable Technology, pages 185–192.
Nina Paravecino, F. and Kaeli, D. (2014). Accelerated
connected component labeling using cuda framework.
In Computer Vision and Graphics, pages 502–509,
Cham. Springer International P.
Photoneo (2017). Phoxi 3d scanner. https://www.photoneo.
com/products/phoxi-scan-m/.
Stava, O. and Benes, B. (2011). Connected component la-
beling in cuda. In Applications of GPU Computing
Series: GPU Computing Gems Emerald Edition.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
210
