
Reflexive Reinforcement Learning:
Methods for Self-Referential Autonomous Learning
B. I. Lyons and J. Michael Herrmann
Institute of Perception, Action and Behaviour, University of Edinburgh,
10 Crichton Street, Edinburgh, EH8 9AB, U.K.
Keywords:
Reinforcement Learning, Exploration-Exploitation Dilemma, Intrinsic Motivation, Self-Referential Learning,
Empowerment, Autonomous Agents.
Abstract:
Reinforcement learning aims at maximising an external evaluative signal over a certain time horizon. If no
reward is available within the time horizon, the agent faces an autonomous learning task which can be used
to explore, to gather information, and to bootstrap particular learning behaviours. We discuss here how the
agent can use a current representation of the value, of its state and of the environment, in order to produce au-
tonomous learning behaviour in the absence of a meaningful rewards. The family of methods that is introduced
here is open to further development and research in the field of reflexive reinforcement learning.
1 INTRODUCTION
Experimentation can be defined as “the process of
trying methods, activities etc. to discover what effect
they have” (Walter, 2008), and is an essential step in
the acquisition of knowledge. This learning criterion
implies that for effective learning of models, there is a
dichotomy present, in which an agent must act to re-
duce the prediction error of the model it is generating,
whilst also maximising the information gain it can ob-
tain from the environment, that is to say, a learning
agent must both learn to accurately perceive the ef-
fects of its actions on the environment, but must also
aim to select actions with the intent of generating the
most information.
This dichotomy is another information centric rep-
resentation of the exploration-exploitation dilemma,
and has attracted researchers from multiple disci-
plines following the publication of J.G. March in
1991 (March, 1991), with greatly cited publications
in neuroscience (Laureiro-Mart
´
ınez et al., 2010), mar-
keting (Prange and Schlegelmilch, 2009) and our
own, computer science (Sutton and Barto, 1999).
In many machine learning applications we con-
sider a given function to be optimised. In autonomous
learning this is not necessarily the case. We here are
interested in an agent that has no specific goal, or in-
deed, is unable to obtain any information related to
the goal temporarily. In such an instance that a robot
is lost or unable to determine the goal, it should de-
fault to an intrinsic motivation to move to an area
where it can learn or be suitably located to perform
a task in the future, whilst still being adaptive to its
environment.
As such it is important to consider the value of
a state in a way that is not tied directly to some de-
sired goal, but instead considers the most interesting
state as one which is most valuable. Such approaches
have been discussed as alternative to reinforcement
leaning, for example, in the theories of empower-
ment (Klyubin et al., 2005b) (see also Sect. 2.2), in
homeokinesis (Der and Martius, 2012) or in Friston’s
programme (Friston et al., 2006) to employ the free
energy to the same goal, as well as some studies that
have considered the self-referential aspect alongside
traditional reinforcement learning methods (Pathak
et al., 2017). All of these approaches have their own
weaknesses which include, immense computational
cost, limitation to low-level behaviours, or conceptual
relation to the explanandum, at least some of which
may be a necessary cost for the gain of autonomy of
the agent that relies on the resp. principle. We will
follow here a slightly different path.
The methods discussed in this paper are what we
here call Reflexive Reinforcement Learning (RRL)
and each have in common that the reward in a rein-
forcement learning task refers reflexively to the val-
ues that are built by the algorithm based on the re-
ward. This is problematic but interesting for au-
tonomous learning, as the agent can use its own learn-
Lyons, B. and Herrmann, J.
Reflexive Reinforcement Learning: Methods for Self-Referential Autonomous Learning.
DOI: 10.5220/0009997503810388
In Proceedings of the 12th International Joint Conference on Computational Intelligence (IJCCI 2020), pages 381-388
ISBN: 978-989-758-475-6
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
381

ing progress as a source of information. There are
three conditions that need to be observed:
• The information accumulated should be meaning-
ful, i.e., the agent used the time when no goal or
target behaviour is to be followed for the acquisi-
tion of information that is likely to be useful later.
This can include the prediction of state transitions,
the discovery of critical states in the environment
(such as a doorway), or the improvement of the
consistency of the representation;
• The learning progress needs to be stable. Informa-
tion that is fed-back into the system can in princi-
ple lead to divergences of the value, which needs
to be avoided;
• The representation needs to remain sensitive to
the introduction of any goal-related information.
E.g., if the agent that got “lost”, receives goal re-
lated information, the autonomous learning phase
should blend in smoothly and beneficially to the
standard learning task.
The rest of this paper is organised as follows: Af-
ter discussion of prior relevant work in Sect. 2, we
specify the reinforcement learning problem that we
are going to study, the theory underpinning the robotic
implementation, the algorithm that we used, as well
as a description of the experimental setup that was
utilised in Sect. 3. The results of the experiments are
provided and analysed also in Sect. 4, and the conclu-
sions of the work and future work are given in Sect. 5.
2 BACKGROUND
2.1 Reinforcement Learning
For the current purpose it suffices to consider the basic
reinforcement learning (RL) algorithm (Sutton and
Barto, 2018). Given a finite Markov decision problem
(MDP), represented as a tuple, (X, x
0
, A, R, P), where
X is a finite set of states with start state x
0
, A a fi-
nite set of actions, and R is a function that assigns to
each state-action pair
1
a number r (or a random vari-
able with mean r) which provides a direct or delayed
(stochastic) evaluation of this pair.
The task is usually to maximise the expected, ac-
cumulative, discounted amount of this number which
means to choose the actions such that either now, or
soon, high values of r are incurred. This task can be
easily achieved if a function Q is known that contains
the information about the expected reward, so that a
1
or possibly to triplets: state, action and following state
large part of RL research is related to function approx-
imation techniques.
In this paper we use a traditional function approx-
imation approach for state-action pairs
Q(x, a) = E
"
∞
∑
t=0
γ
t
r
t
|x
0
= x, a
0
= a
#
(1)
V (x) = E
"
∞
∑
t=0
γ
t
r
t
|x
0
= x
#
(2)
where Q(x, a) is updated by (Sutton and Barto, 1999)
with discount γ
∆Q(x, a) = α (r
t
+ γV (x
t+1
) − Q(x, a)) (3)
with learning rate α and the value is given by
V (x
t+1
) = max
a
Q(x
t+1
, a). (4)
Because we essentially modify only the reward sig-
nal r, our approach can also be used with many other
RL algorithms.
We are interested here in extracting knowledge
from these values, which has been done related to
temporal fluctuations, but it becomes more interest-
ing if spatial variations are considered because in
this way information directly related to the environ-
ment can be extracted, whereas temporal fluctuations
mainly provide information about the learning pro-
cess (Herrmann and Der, 1995).
2.2 Empowerment
The concept of empowerment (Klyubin et al., 2005b)
is a way to express the value of a state without consid-
eration of any goal-oriented behaviour. It can be un-
derstood as a quantification of an agent’s control over
its environment (Salge et al., 2014) and is a quantifi-
cation of the freedom of choice of actions in combina-
tion with the level of reproducibility of an sequence of
actions. The aim is not to motivate exploration from
an agent, but instead to identify preferred states in an
environment that is already known. If the agent is
within the state s
t
the n-step empowerment is defined
based on mutual information
E
n
(s
t
) = max
π:s→a
I (s
t+n
;a
t+n−1
, . . . , a
t
) (5)
so that the task is to find a policy for which the mutual
information between the next actions and the set of
states is maximal.
Empowerment usually requires full prior informa-
tion as well as the evaluation of all possible time se-
ries and states to determine which state or states are
best for the agent to occupy over a given n-step time
horizon. In this sense it is quite similar to POMDPs.
NCTA 2020 - 12th International Conference on Neural Computation Theory and Applications
382

In the context of RL, this level of computational com-
plexity appears unnecessary because the precise value
of E
n
(5) is largely irrelevant, alternatively an approx-
imation of the empowerment can be produced itera-
tively by considering the entropy gain per step E
1
(s
t
)
and then summing over the time horizon specified by
the RL discount factor γ.
E
γ
(s
t
) =
∞
∑
t=t
0
γ
t−t
0
E
1
(s
t
) (6)
The concept of γ-empowerment introduced in Eq. 6
is similar in information provided, but not equivalent
to the original concept (5), because it does not have
a crisp time horizon, because it depends in the non-
asymptotic case on the behaviour of the agent, and
also because it allows for different measures of the
local empowerment E
1
(s
t
) as long as the tendency of
the agent to roam without restrictions is captured in
an appropriate way, see Sect. 3.1.
3 METHODS
3.1 Actions and Policy
Each of the tested agents can move in any of the four
cardinal directions. The agent is unable to remain in
the same state, with the exception that if it attempts to
move into an obstacle or wall, its position will remain
unchanged. We also maintained a very high explo-
ration rate, in the sense of an ε-greedy policy with
ε = 0.75 such that the agent will learn to plan ahead
as early as possible, because at this high level of ran-
domness errors can often not be corrected in the next
or following steps.
As our aim here is mainly that of illustration if the
principle of Reflexive RL (RRL), we opted to use a
box function over the entire state action space rather
than a reduced number of basis functions, with a tra-
ditional ε-greedy policy; however, the approach will
work in such a space.
3.2 Rewards
Here we discuss the reward functions for the agent
across each of the tested approaches in order of ap-
pearance in the results section.
When prioritising the maximisation of entropy the
agent was rewarded
R(x, a) =
(
H (x, a) − 1, if collision
H (x, a) , else
(7)
where
H (x, a) = −
∑
x
0
p(x
0
|x, a)log p(x
0
|x, a). (8)
When prioritising the maximisation of γ-empower-
ment, the agent was rewarded
R(x, a) =
(
−1, if x
t+1
= x
t
0, else
(9)
When prioritising the reduction of prediction error,
the agent was rewarded
R(x, a) =
(
1, if x
t+1
= x
t
0, else
(10)
When prioritising the visitation of corners, the agent
was rewarded
R(x, a) =
(
1, if s(x
t+1
) > 1
0, else
(11)
where s(x) ∈ [0, 1, 2] is the number of occupied adja-
cent squares in the 4-neighbourhood of the agent.
3.3 Environments
Each of the environments were selected based on the
features they present. The empty arena was chosen as
the base case. The second environment (b) presents a
winding corridor which ends in a dead end, chosen to
observe the effects over corridors of varying size and
the effects of the surrounded end. Environment (c)
observes the effect of large obstacles in the state space
and the effects of irregular shapes on the algorithm.
The final environment, environment (d) consists
of a smaller room and a large room, chosen to ob-
serve the effects of differently sized regions of the
state space, and observe the value the agent places on
these objects. As the goal of the paper was to ap-
proach similarity with the concept of empowerment,
this was a useful environment for observing the agents
preference for different spaces in similarity to n-step
empowerment with small n.
3.4 Reflexive Reinforcement Learning
In the case of reflexive reinforcement learning, the
reflexive component informs state valuation through
standard reinforcement learning as seen in Eq. 3.
This additional component allows that we are able to
switch between a variety of different components for
different needs, as we will show in Sect. 4.
As seen in Fig. 1, the reflexive component will re-
ceive external rewards from the environment through
the observation of the state, and this adjusted reward
Reflexive Reinforcement Learning: Methods for Self-Referential Autonomous Learning
383
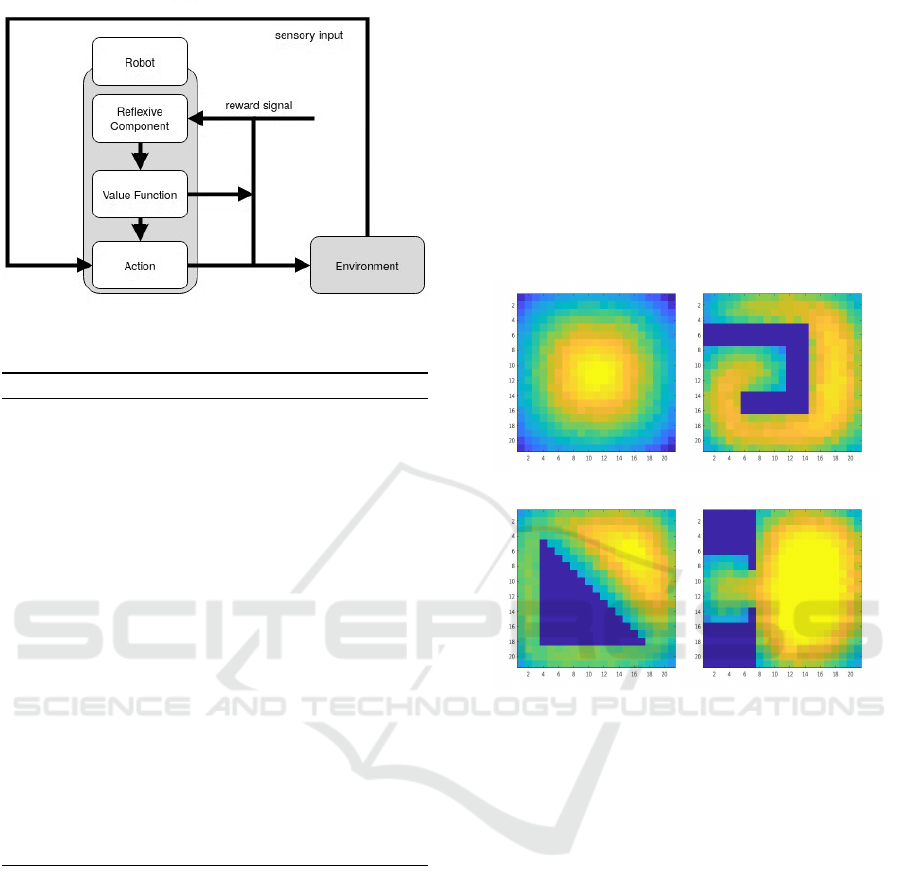
Figure 1: This diagram represents the function of the RRL
algorithm as utilised here.
Algorithm 1: Reflexive Reinforcement Learning.
Require: Reflexive policy π
θ
ˆr
(a|x) = p(a|x, θ
ˆr
),
with initial parameters θ
ˆr
= θ
ˆr
0
.
Require: Task related policy π
θ
r
(a|x) = p(a|x, θ
r
),
with initial parameters θ
r
= θ
r
0
.
while e < E do
Draw starting state x
0
∼ p(x)
while t < T do
if r ≡ 0 {no task specific rewards} then
Draw action a
t
∼ π
θ
ˆr
(a|x) (RRL)
else
Draw action a
t
∼ π
θ
r
(a|x) (RL)
end if
Observe next state x
t+1
∼ p(x
t+1
|x
t
, a
t
)
Reflect: Observe rewards ˆr
t
and r
t
θ
ˆr
+ = α∇
θ
ˆr
logπ(a|x)
θ
r
+ = α∇
θ
r
logπ(a|x)
t ← t + 1 {time steps within episode}
end while
e ← e + 1 {continue to next episode}
end while
is used to inform the state valuation or valuations. In
this manner it is possible for the agent to continue to
receive information pertinent to potential tasks as it
maintains its motivation to explore the environment
through the different valuations during periods of no
task or when in a state where it is lost.
4 EXPERIMENTS
To observe the effects of the various maxims, each
agent was run for 10
7
episodes, each being 42 time
steps long. The reflexive reinforcement learning max-
ims we are here comparing the direct computation of
entropy, and a simplified alternative for entropy we
here call γ-empowerment. In addition to this, we also
considered an approach we here refer to as predic-
tion error reduction, as complement of entropy and
γ-entropy, where the agent favours regions where fea-
tures are visible.
4.1 Entropy
For the maximisation of entropy, we computed en-
tropy directly and supplied this as a reward bonus to
the agent as seen in Eq. 7.
a b
c d
Figure 2: These colour maps represent the value of the var-
ious arenas the agent was placed in when aiming to purely
maximise entropy, where there are 10
7
episodes, each be-
ing 42 time steps long, ε = 0.75, γ = 0.9, α = 0.1 . (a) is an
empty arena. (b) is a snaking obstacle. (c) has a triangular
obstacle with two corridors. (d) is an arena consisting of
two rooms, where the agent initialises in the smaller room.
Here we see that purely maximising entropy leads
to increased valuations of regions far from walls and
relative obstacles. In Fig. 2(b) we see a clear increase
in valuation as the agent moves away from either of
the “dead-end” regions, with the greatest value being
seen in the space on the right hand side, which allows
for greatest n-step access to the remainder of the en-
vironment.
Similarly in Fig. 2(d), the environment contain-
ing two different sized rooms, we observe that the
greater values in the respective rooms are toward the
centre, giving greater access to the remainder of the
environment; however, as can be noted, the restricted
region of the path between the two rooms also sees
a greater valuation than other restricted regions, as
this is the area that must be traversed to receive in-
creased entropy. This is consistent with what is ob-
served in empowerment (Klyubin et al., 2005b), par-
NCTA 2020 - 12th International Conference on Neural Computation Theory and Applications
384
ticularly the cases of the mazes where an agent is in
the state of greatest empowerment when it is not en-
closed in walls, and over a defined n-step time horizon
can actualise the greatest number of future states from
the current state.
4.2 γ-Empowerment
When using γ-Empowerment as the reflexive compo-
nents, we calculated the reward to be provided to the
agent as in Eq. 9.
As remaining in the same state between time steps
is only possible in the case of colliding with an ob-
stacle, and the high level of epsilon makes this much
more likely near corners or walls, we felt this was an
appropriate quantity to consider in consort with en-
tropy and empowerment, since under this scheme an
agent should more highly value regions that provide
future freedom of movement, and as opposed to the
entropy case above, requires no calculation, and is
easy to work with on-policy.
a b
c d
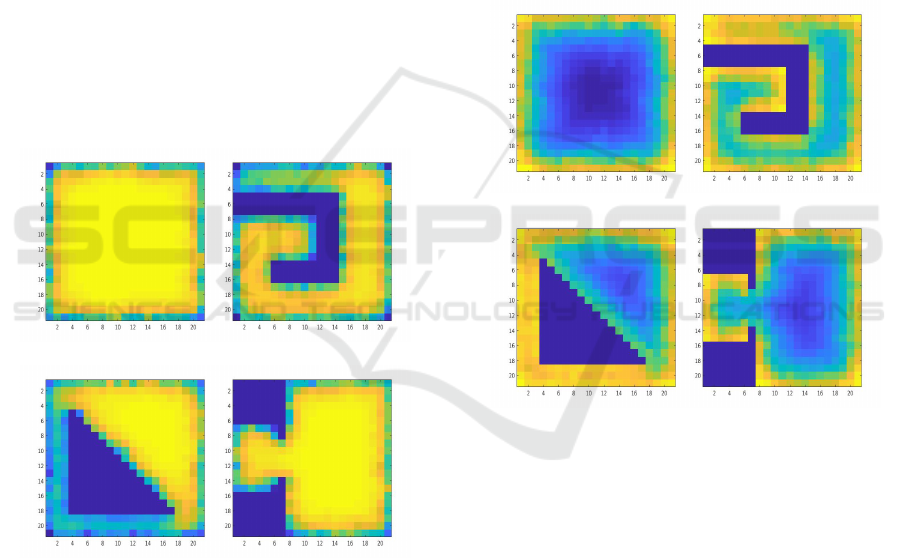
Figure 3: These colour maps represent the value of the var-
ious arenas the agent was placed in when aiming to purely
maximise γ-empowerment (6), with the obstacles, episodes,
episode length and parameters as in Fig. 2.
The resulting graphs can be seen in Fig. 3. Here
we see similar regions of high valuation, with sig-
nificantly increased value in the surrounding regions.
This is consistent with what we would expect in an
empowerment case, though with a substantially in-
creased value for n in the traditional case.
We would not expect such a high value directly up
to the wall regions, where in the maze variants seen in
Ref. (Klyubin et al., 2005b) paper there is a smoother
gradient between values, with much more distinct re-
gions of increased empowerment, closer to what we
see in the entropy case.
4.3 Prediction Error Reduction
Another approach we considered is that of an agent
attempting to reduce prediction error. When an agent
is attempting to find a task, it will be essential for the
agent to be adequately localised to better enable the
finding of a goal or regions deemed to be interest-
ing, as such it is common in SLAM approaches to use
walls and other fixed features of the environment to
localise, in this approach we consider an agent’s need
to find such features of the environment.
a b
c d
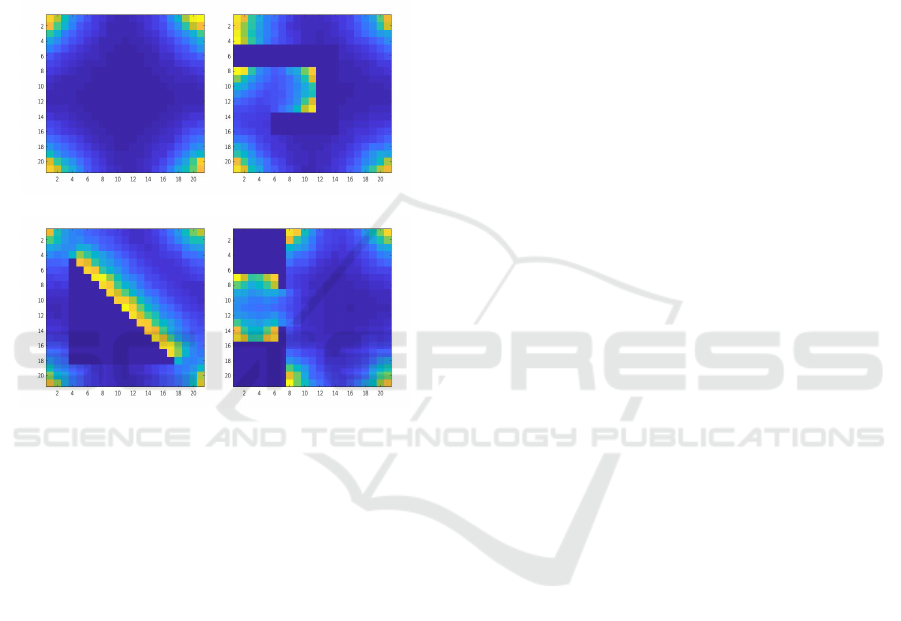
Figure 4: These colour maps represent the value of the vari-
ous arenas the agent was placed in when being rewarded for
obtaining sensory values of obstacles or walls in the envi-
ronment, with all parameters as in Fig. 2.
By simply rewarding the agent for remaining in
the same state in the following time steps, we are
able to consider these external, easily referable re-
gions of the environment with a significant increase
in value. This approach has the benefit that it can
be implemented alongside traditional SLAM architec-
ture (Thrun, 2002) so as to reward moving to easily
identifiable regions of the state space, and in future
work we intend to implement this, with the additional
rewards for correctly predicting the agents state.
4.4 Corner Favouring
Our final approach considered is that of corner favour-
ing. When an agent is lost and attempting to find
Reflexive Reinforcement Learning: Methods for Self-Referential Autonomous Learning
385
a task in noisy environments, corners offer regions
of significant information about location, and in dy-
namic environments these regions can typically be
considered to be “out of the way”. When consider-
ing the prediction error reduction case, we focused
on rewarding the agent simply by sensing anything in
any of the sensor directions, whereas here the focus is
on rewarding multiple sensor inputs, and as such, can
be considered to be moving to regions of significant
information.
a b
c d
Figure 5: These colour maps represent the value of the var-
ious arenas the agent was placed in when being rewarded
for obtaining multiple sensory values of obstacles or walls
in the environment, with all parameters as in Fig. 2.
By rewarding the agent with a small scalar reward
where multiple sensor inputs are engaged, as seen in
Eq.11, the agent highly values corner regions in the
state space in Fig. 5(a), (b), and (d). This also oc-
curs in Fig. 5(c); however, here we also see a strict
favouring of the wall along the diagonal region of the
object, which is a feature of the discretisation of the
state space.
4.5 Remarks
Rewarding an agent based on entropy leads to valua-
tion of states which is commensurate with what one
would expect in an empowerment approach, with the
benefit that it can be computed on policy, without the
necessity to exhaustively compute over all policies
and time series.
Similarly, considering the easier to compute γ-
empowerment, we are able to obtain a valuation sim-
ilar to what we would expect from an empowerment
approach; however, we observe that the valuation re-
mains very similar over the open regions with no
clear peak value in the environment, which may not
prove as useful to the goal of intrinsic motivation over
potentially dynamic environments as it shows a ten-
dency to prefer vast regions in the state space, which
will make isolating the most interesting or free re-
gions over a complex or dynamic space much more
unlikely.
Where reduction in prediction error and relocalis-
ing are key priorities for a lost agent, we can also con-
sider employing our variants in Sect. 4.3 and Sect. 4.4
to move to regions at the edge of the state space,
where there may be less task dependent information,
yet the information is consistent and stable to relo-
calise and return to searching for task relevant infor-
mation with a better understanding of where such in-
formation seen in the other variants can be found.
All of these variants here serve as a compli-
ment to traditional reinforcement learning approaches
through the use of the reflexive component, and in-
deed, can also be considered in tandem with one an-
other. An intrinsically motivated, agent should seek
out regions which are interesting or surprising as in
sections 4.1 and 4.2, where no task relevant informa-
tion is available in these identified regions of interest,
the agent should return to regions where prediction
error can be minimised, and relocalisation is possible,
and the cycle should repeat, in a control system, per-
haps after sufficient searching of the state space, the
agent should move to regions which have minimal im-
pact on a potentially dynamic environment, such as a
corner, and wait to search again later.
Alternatively, we consider that if there is no task
dependent information available, a continually learn-
ing agent should seek out these surprising regions,
with the aim of learning more about the environment
and correcting the model, by more accurately learning
state transition probabilities, or learning about fea-
tures present in these high interest subspaces, to better
perform tasks in the future when this information be-
comes available.
5 DISCUSSION
5.1 Exploration Vs. Exploitation
The exploration-exploitation dilemma is not a solved
problem in any of the various domains that it has been
researched in. We presented here a use case for util-
ising entropy as a reward on its own or in conjunc-
tion with other rewards to highlight the best regions
available to an agent in an environment where there is
NCTA 2020 - 12th International Conference on Neural Computation Theory and Applications
386

no clear goal. In doing so we have found that these
regions which are considered highly valued are simi-
lar to those found in empowerment, where the agent
more highly values regions from which it is able to ac-
cess a larger subset of the state space over any given
discrete time frame.
As opposed to having to create sophisticated mod-
els for task location, the use of entropy maximisation
may enable agents to find a task or location when lost
in a changing environment. In future work we intend
to consider the problem using actor-critic algorithms,
where the actor and critic use different state-action
value functions, and to employ this in a dynamic envi-
ronment as well as in combination with a hierarchical
model (Smith et al., 2020) alongside other functions
or goals to study robotic self-motivation.
5.2 Bayesian Theory
The methods for self-supervised learning discussed
here in the context of RRL have a general form as
rewards in a reinforcement learning algorithm. This
view has been discussed a decade ago in contrast to
active inference (Friston et al., 2009), but recently it
was shown that the active inference can in integrated
with RL (Tschantz et al., 2020), such that it is an inter-
esting question whether our reward-based approach
can also be integrated with the Bayesian view and act
as a prior for exploration in a general learning task.
Our approach can contribute also in the Bayesian
context an efficient estimation of information-
theoretical quantities such as shown here for entropy
or empowerment. The advantage would be the state
augmentation by a continuous entropy value is more
naturally realisable in a Bayesian approach, whereas
here it requires in principle a continuous state space
in order to guarantee Markovianity and thus conver-
gence of the RL algorithm. In continuous problems,
where Markovianity cannot be exploited in the same
was as in grid world, this may be a less critical issue.
5.3 Intrinsic Motivation
The search for an intrinsic motivation for an agent to
perform any given task, develop new behaviours, or
learn its own embodiment is and take advantage of
that is a key task in the development of continually
learning, adaptable agents which are capable of work-
ing in highly dynamic environments. It is essential
that an agent is able to identify important or interest-
ing regions in the sensorimotor space, both to learn
the model, or in fact learn a goal where no clear goal
is immediately visible.
Empowerment seeks to do this (Salge and Polani,
2017) by defining an empirical measure which can be
performed over the state-action space to definitively
state the best possible states for an agent to be in to
have sufficient future degrees of freedom. This valu-
able concept is unfortunately subject to the curse of
dimensionality, and as such, other approaches to esti-
mating empowerment have been sought (Zhao et al.,
2019). We believe that we have shown that entropy
maximisation allows for an agent to approximate such
a position utilising an on-policy approach over vary-
ing environments, by instead considering more inter-
esting or surprising regions of the state space to be the
most valuable. This can more concisely be thought
of as a form of information empowerment, where, as
opposed to the mantra “All else being equal, be em-
powered” (Klyubin et al., 2005a), we consider that
perhaps the notion in a adaptive learning agent should
be “all else being equal, be interesting”.
5.4 Applications
We believe that RRL has a variety of potential ap-
plications in terms of control architecture for an au-
tonomous agents, as well as less lofty pursuits. As we
see in Fig. 2 and Fig. 3, the agent shows highlighted
regions of preference around the obstacles, preferring
to avoid walls and obstructions. We believe there is
potential here to consider the notion of “curiosity path
planning”, where an agent plans the route on the basis
of interesting regions within a known environment to
better learn about, or be available for future tasks.
The full potential of RRL will become available
only if the methods discussed here are incorporated
into a more general framework that includes contin-
uous state and action spaces as well as higher-order
reflexion. A very promising option to enable RRL in
a wider range of contexts appears to be a combination
with inverse reinforcement learning (Ng and Russell,
2000), where the agent derives a reflexive reward sig-
nal from the performance of a parallel inverse learner.
A detailed discussion of this approach is beyond the
scope of this paper and is subject of current research.
6 CONCLUSION
Reflexive reinforcement learning (RRL) is a new di-
rection in machine learning. It is based on the obser-
vation that in learning problem where no direct gradi-
ent can be used in order to adapt to a particular, the
representation of information from the environment
(such as state information or evaluative information)
requires not only guiding principles (such as smooth-
Reflexive Reinforcement Learning: Methods for Self-Referential Autonomous Learning
387

ness, consistency and locality), but also provides in-
formation that can be used to decide about the actions
of an agent.
The advantage of reflexive reinforcement learn-
ing is that an agent can learn even in the ab-
sence of an evaluative signal (reward and punish-
ment), it can bootstrap elementary actions (as in
homeokinesis (Der and Martius, 2012)) or can learn
about options in the environment (as in empower-
ment (Klyubin et al., 2005b)), and obtain more mean-
ingful and generalisable representations (see (Smith
and Herrmann, 2019)).
The unavoidable difficulty in reflexive reinforce-
ment learning consists in the fact that the use of quan-
tities that are eventually based on the reward as a re-
ward, introduces a feedback loop which can lead to
instabilities or divergences. This is not unknown in
RL, where e.g., an often visited source of low re-
ward can dominate a better source of reward that is
rarely found, or in cases where correlations among
basis functions lead to divergences as notice already
in Ref. (Baird, 1995).
In RRL such feedback is even more typical, but
can also be used to introduce structure the state space
by self-organised pattern formation or to identify hi-
erarchical relationships as will be studied in future.
In order to keep the effects of self-referentiality under
control and to make use of their potential a dynamical
systems theory of reinforcement learning is required
that does not only consider the agent as a dynamical
system, but the full interactive system formed by the
agent, its environment and its internal representations.
ACKNOWLEDGEMENTS
This research was funded by EPSRC through the CDT
RAS at Edinburgh Centre for Robotics. Discussions
with Calum Imrie and Simon Smith are gratefully ac-
knowledged.
REFERENCES
Baird, L. (1995). Residual algorithms: Reinforcement
learning with function approximation. In Machine
Learning Proceedings 1995, pages 30–37. Elsevier.
Der, R. and Martius, G. (2012). The playful machine: The-
oretical foundation and practical realization of self-
organizing robots, volume 15. Springer Science &
Business Media.
Friston, K., Kilner, J., and Harrison, L. (2006). A free en-
ergy principle for the brain. Journal of Physiology-
Paris, 100(1-3):70–87.
Friston, K. J., Daunizeau, J., and Kiebel, S. J. (2009). Re-
inforcement learning or active inference? PloS one,
4(7):e6421.
Herrmann, M. and Der, R. (1995). Efficient q-learning by
division of labour. In Proceedings ICANN, volume 95,
pages 129–134.
Klyubin, A. S., Polani, D., and Nehaniv, C. L. (2005a). All
else being equal be empowered. In European Confer-
ence on Artificial Life, pages 744–753. Springer.
Klyubin, A. S., Polani, D., and Nehaniv, C. L. (2005b).
Empowerment: A universal agent-centric measure of
control. In 2005 IEEE Congress on Evolutionary
Computation, volume 1, pages 128–135. IEEE.
Laureiro-Mart
´
ınez, D., Brusoni, S., and Zollo, M. (2010).
The neuroscientific foundations of the exploration-
exploitation dilemma. Journal of Neuroscience, Psy-
chology, and Economics, 3(2):95.
March, J. G. (1991). Exploration and exploitation in organi-
zational learning. Organization science, 2(1):71–87.
Ng, A. Y. and Russell, S. J. (2000). Algorithms for inverse
reinforcement learning. In IMCL, pages 663–670.
Pathak, D., Agrawal, P., Efros, A. A., and Darrell, T. (2017).
Curiosity-driven exploration by self-supervised pre-
diction. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition Workshops,
pages 16–17.
Prange, C. and Schlegelmilch, B. B. (2009). The role of am-
bidexterity in marketing strategy implementation: Re-
solving the exploration-exploitation dilemma. Busi-
ness Research, 2(2):215–240.
Salge, C., Glackin, C., and Polani, D. (2014). Empower-
ment – an introduction. In Guided Self-Organization:
Inception, pages 67–114. Springer.
Salge, C. and Polani, D. (2017). Empowerment as re-
placement for the three laws of robotics. Frontiers in
Robotics and AI, 4:25.
Smith, S. C., Dharmadi, R., Imrie, C., Si, B., and Herrmann,
J. M. (2020). The DIAMOnD model: Deep recur-
rent neural networks for self-organising robot control.
Frontiers in Neurorobotics, 14:62.
Smith, S. C. and Herrmann, J. M. (2019). Evaluation
of internal models in autonomous learning. IEEE
Transactions on Cognitive and Developmental Sys-
tems, 11(4):463–472.
Sutton, R. S. and Barto, A. G. (1999). Reinforcement learn-
ing. Journal of Cognitive Neuroscience, 11(1):126–
134.
Sutton, R. S. and Barto, A. G. (2018). Reinforcement learn-
ing: An Introduction. MIT Press.
Thrun, S. (2002). Probabilistic robotics. Communications
of the ACM, 45(3):52–57.
Tschantz, A., Millidge, B., Seth, A. K., and Buckley, C. L.
(2020). Reinforcement learning through active infer-
ence. arXiv preprint arXiv:2002.12636.
Walter, E. (2008). Cambridge advanced learner’s dictio-
nary. Cambridge University Press.
Zhao, R., Tiomkin, S., and Abbeel, P. (2019). Learning
efficient representation for intrinsic motivation. arXiv
preprint arXiv:1912.02624.
NCTA 2020 - 12th International Conference on Neural Computation Theory and Applications
388
