
Evaluation of Lyapunov Function Candidates through Averaging
Iterations
Carlos Arg
´
aez
1 a
, Peter Giesl
2 b
and Sigurdur Hafstein
1 c
1
Science Institute, University of Iceland, Dunhagi 3, 107 Reykjav
´
ık, Iceland
2
Department of Mathematics, University of Sussex, Falmer, BN1 9QH, U.K.
Keywords:
Complete Lyapunov Functions, Chain-recurrent Set, Numerical Methods, Dynamical Systems, Iterative
Methods.
Abstract:
A complete Lyapunov function determines the behaviour of a dynamical system. In particular, it splits the
phase space into the chain-recurrent set, where solutions show (almost) repetitive behaviour, and the part
exhibiting gradient-like flow where the dynamics are transient. Moreover, it reveals the stability of sets and
basins of attraction through its sublevel sets. In this paper, we combine two previous methods to compute
complete Lyapunov functions: we employ quadratic optimization with equality and inequality constraints to
compute a complete Lyapunov function candidate and we evaluate its quality by using a method that improves
approximations of complete Lyapunov function candidates through iterations.
1 INTRODUCTION
Consider a general autonomous ODE:
˙
x = f(x), where x ∈ R
n
. (1)
A complete Lyapunov function (CLF) candidate is a
function V : R
n
→ R which is constant or decreasing
along solutions of (1). If V is smooth, then this can
be expressed by the fact that its orbital derivative, i.e.
the derivative along solutions, is negative or zero. In
formula, this reads ∇V (x) · f(x) ≤ 0.
A CLF candidate delivers information about the
qualitative behaviour of (1). The larger the area of the
phase space, where V is strictly decreasing, the more
information can be obtained from the CLF candidate.
The region in which the solution to (1) shows (almost)
repetitive behaviour, i.e. the chain-recurrent set, is
necessarily contained in the set where ∇V (x) · f(x) =
0.
The first proof of the existence of a CLFs for dy-
namical systems was given by Conley (Conley, 1978).
This proof holds for a compact metric space and it
considers each corresponding attractor-repeller pair
and constructs a function which is 1 on the repeller,
0 on the attractor and decreasing in between. Then
a
https://orcid.org/0000-0002-0455-8015
b
https://orcid.org/0000-0003-1421-6980
c
https://orcid.org/0000-0003-0073-2765
these functions are summed up over all attractor-
repeller pairs. Later, Hurley generalized these ideas
to more general spaces (Hurley, 1992; Hurley, 1998).
These functions, however, are just continuous func-
tions. In (Fathi and Pageault, 2019) and (Bernard and
Suhr, 2018; Suhr and Hafstein, 2020) the existence of
smooth CLFs for ODEs on compact and noncompact
phase spaces was proved, respectively.
Computational approaches to construct CLFs have
been proposed in (Kalies et al., 2005; Ban and Kalies,
2006; Goullet et al., 2015), where the phase space was
subdivided into cells, defining a discrete-time sys-
tem given by the multivalued time-T map between
them. This multivalued map was then computed using
the computer package GAIO (Dellnitz et al., 2001).
Hence, an approximate complete Lyapunov function
was constructed using graph algorithms (Ban and
Kalies, 2006). This approach requires a high number
of cells even for low dimensions. In (Bj
¨
ornsson et al.,
2015), a CLF was constructed as a continuous piece-
wise affine (CPA) function on a fixed simplicial com-
plex. However, it is assumed that information about
the location of local attractors is available.
In this paper we consider two different methods,
which have previously been proposed to compute
CLF candidates. Both use collocation with radial ba-
sis functions (RBF) to parameterize a CLF candidate.
In the first method quadratic programming (Giesl
et al., 2018) is used to compute a norm-minimal so-
734
Argáez, C., Giesl, P. and Hafstein, S.
Evaluation of Lyapunov Function Candidates through Averaging Iterations.
DOI: 10.5220/0009992507340744
In Proceedings of the 17th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2020), pages 734-744
ISBN: 978-989-758-442-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

lution with differential equality and inequality con-
straints. The second method solves a well-posed dis-
cretization of an ill-posed PDE (Arg
´
aez et al., 2017;
Arg
´
aez et al., 2018a; Arg
´
aez et al., 2018b; Arg
´
aez
et al., 2018c). By examining where the solution to the
discretized problem delivers a poor approximation to
the original PDE, information about the location of
the chain-recurrent set is obtained. In subsequent it-
erations the right-hand side of the PDE is modified to
include information from previous solutions and nu-
merical evidence suggests that a good estimate on the
chain-recurrent set is delivered after sufficiently many
iterations.
In this paper we will investigate the local optimal-
ity of the norm-minimal solution to the quadratic min-
imization problem from (Giesl et al., 2018). In de-
tail, we will use the norm-minimal solution as the ini-
tial value to the iterative method from (Arg
´
aez et al.,
2018c) and see how much it improves. This gives us
an indication of how optimal, in the sense of deliver-
ing a reasonable estimate on the chain-recurrent set,
the norm-minimal solution to the quadratic optimiza-
tion problem is.
The structure of the paper is as follows: In Section
2 we briefly describe meshfree collocation methods
using RBF and then we give a short description of the
quadratic optimization method and the iterative PDE
method to compute CLF candidates. Then, in Sec-
tion 3 we present our new algorithm to evaluate the
norm-minimal solution to the quadratic optimization
problem using the iterative PDE method. In Section
3.2 we numerically investigate three planar systems
using our new method with two different support pa-
rameters for the radial basis functions and in Section
4 we draw conclusions from our results.
2 THE COMPUTATIONAL
METHODS
We first give a short review of collocation methods
using meshfree collocation of RBFs, before we de-
scribe the methods to compute CLF candidates using
quadratic optimization and iteratively solving PDEs.
2.1 Meshfree Collocation
Meshfree collocation with RBFs can be used to solve
generalized interpolation problems. A classical in-
terpolation problem is, given finitely many points
x
1
,...,x
N
∈ R
n
and corresponding values r
1
,...,r
N
∈
R, to find a function v satisfying v(x
j
) = r
j
for all
j = 1,...,N.
Solving a PDE of the form LV (x) = r(x), where
L denotes a differential operator, is a generalized in-
terpolation problem as we look for a function v sat-
isfying Lv(x
j
) = r
j
for all j = 1, . . . , N, where again
finitely many points x
1
,...,x
N
∈ R
n
and values r
1
=
r(x
1
),...,r
N
= r(x
N
) ∈ R are given.
The approximating functions will belong to a
Hilbert space H, which we assume to have a repro-
ducing kernel Φ : R
n
× R
n
→ R, given by a RBF ψ
0
through Φ(x,y) := ψ
0
(kx − yk
2
).
In general, we seek to reconstruct the target func-
tion V ∈ H from the information r
1
,...,r
N
∈ R gen-
erated by N linearly independent functionals λ
j
∈ H
∗
,
i.e. λ
j
(V ) = r
j
holds for j = 1,...,N. The optimal
(norm-minimal) reconstruction of the function V is
the solution of the problem in H:
min{kvk
H
: λ
j
(v) = r
j
,1 ≤ j ≤ N}. (2)
It is well known (Wendland, 2005) that the optimal
reconstruction can be represented as a linear combi-
nation of the Riesz representatives v
j
∈ H of the func-
tionals and that these are given by v
j
= λ
y
j
Φ(·,y), i.e.
the functional applied to one of the arguments of the
reproducing kernel. Hence, the solution can be writ-
ten as
v(x) =
N
∑
j=1
β
j
λ
y
j
Φ(x,y), (3)
where the coefficients β
j
are determined by the inter-
polation conditions λ
j
(v) = r
j
, 1 ≤ j ≤ N.
Consider now the PDE LV (x) = r(x), where r(x)
is a given function and L denotes the linear operator
of the orbital derivative LV (x) = V
0
(x) = ∇V (x)·f(x).
We choose N pairwise distinct points x
1
,...,x
N
∈
R
n
of the phase space, which are not equilibria, i.e.
f(x
j
) 6= 0 for all j = 1,...,N, and define functionals
λ
j
(v) := (δ
x
j
◦L)
x
v = v
0
(x
j
) = ∇v(x
j
)·f(x
j
), where δ
is Dirac’s delta distribution. The information is given
by the right-hand side r
j
= r(x
j
) for all 1 ≤ j ≤ N.
The approximation is then
v(x) =
N
∑
j=1
β
j
(δ
x
j
◦ L)
y
Φ(x,y), (4)
where the coefficients β
j
∈ R can be calculated by
solving the system Aβ = r of N linear equations.
Here, A is the N × N matrix with entries
a
i j
= (δ
x
i
◦ L)
x
(δ
x
j
◦ L)
y
Φ(x,y)
= hλ
y
i
Φ(·,y),λ
z
j
Φ(·,z)i
H
. (5)
The matrix A is positive definite, since the λ
i
∈ H
∗
are
linearly independent.
If the PDE has a solution V , then the error kLV −
Lvk
L
∞
can be estimated in terms of the so-called
Evaluation of Lyapunov Function Candidates through Averaging Iterations
735

fill distance which measures how dense the points
{x
1
,...,x
N
} are. In this case, v is the approximation
to V . For the construction of a classical Lyapunov
function for an equilibrium such error estimates were
derived in (Giesl, 2007; Giesl and Wendland, 2007),
see also (Narcowich et al., 2005; Wendland, 2005).
Meshfree collocation is well suited for solving
PDEs because scattered points can be added, no trian-
gulation of the phase space is necessary, the approx-
imating function is smooth and the method works in
any dimension.
In this paper, we use Wendland functions (Wend-
land, 1995; Wendland, 1998) as radial basis func-
tions through ψ
0
(r) := ψ
l,k
(cr), where c > 0, k ∈
N is a smoothness parameter and l = b
n
2
c + k + 1.
Wendland functions are positive definite functions
with compact support, which are polynomials on
their support; the corresponding reproducing kernel
Hilbert space is norm-equivalent to the Sobolev space
W
k+(n+1)/2
2
(R
n
). They are defined by recursion: for
l ∈ N, k ∈ N
0
we define
ψ
l,0
(r) = (1 − r)
l
+
ψ
l,k+1
(r) =
R
1
r
tψ
l,k
(t)dt
(6)
for r ∈ R
+
0
, where x
+
= x for x ≥ 0 and x
+
= 0 for
x < 0.
The parameter c > 0 controls the size of the sup-
port of the RBF, i.e. the support is a sphere of radius
c
−1
in the Euclidian norm centred at the origin.
We define recursively ψ
i
(r) =
1
r
dψ
i−1
dr
(r) for i =
1,2 and r > 0. Note that lim
r→0
ψ
i
(r) exists if the
smoothness parameter k of the Wendland function is
sufficiently large. The explicit formulas for v and its
orbital derivative are then, see (4)
v(x) =
N
∑
j=1
β
j
hx
j
− x,f(x
j
)iψ
1
(kx − x
j
k
2
),
v
0
(x) =
N
∑
j=1
β
j
h
− ψ
1
(kx − x
j
k
2
)hf(x),f(x
j
)i (7)
+ ψ
2
(kx − x
j
k
2
)hx − x
j
,f(x)i · hx
j
− x,f(x
j
)i
i
where h·,·i denotes the standard scalar product in R
n
.
The matrix elements of A are
a
i j
= ψ
2
(kx
i
− x
j
k
2
)hx
i
− x
j
,f(x
i
)ihx
j
− x
i
,f(x
j
)i
− ψ
1
(kx
i
− x
j
k
2
)hf(x
i
),f(x
j
)i (8)
More detailed explanations on this construction are
given in (Giesl, 2007, Chapter 3).
2.2 CLFs via Quadratic Programming
In (Giesl et al., 2018) a novel method to compute CLF
candidates via quadratic programming was proposed.
This approach reflects the definition of a CLF candi-
date, using differential inequalities rather than equali-
ties. In particular, a CLF candidate V needs to satisfy
V
0
(x) ≤ 0 because V is non-increasing. This makes
the following requirement natural:
V
0
(x)
= −1 for x ∈ X
−
≤ 0 for x ∈ X
0
(9)
where X = X
−
∪ X
0
is the collocation grid,
X
−
= {x
−M+1
,...,x
0
}, (10)
X
0
= {x
1
,...,x
N
} (11)
and X
−
must only include points in the subset of the
phase space where the flow is gradient-like.
In correspondence with general interpolation
problems delivering the norm-minimal solution as in
(2) we seek to minimize kV k
H
with the constraints
given by (9).
Thus with the functionals λ
j
= δ
x
j
◦ L for j =
−M + 1,...,N we consider the optimization prob-
lem:
minimize kvk
H
subject to λ
j
(v) = −1, j = −M + 1, ..., 0
λ
i
(v) ≤ 0,i = 1, ...,N
(12)
where H is a reproducing kernel Hilbert space with
kernel Φ, inner product h·, ·i
H
and norm k · k
H
:=
p
h·,·i
H
. If all points x
−M+1
,...,x
N
are pairwise dis-
tinct and no equilibrium points of (1), then the λ
i
∈ H
∗
are linearly independent and it was shown in (Giesl
et al., 2018) that (12) possesses a unique solution s
∗
.
A function of the form
v(x) =
N
∑
j=1
β
j
λ
y
j
Φ(x,y)
has the following norm in H
kvk
2
H
=
*
N
∑
i=1
β
i
λ
y
i
Φ(·,y),
N
∑
j=1
β
j
λ
z
j
Φ(·,z)
+
H
=
N
∑
i, j=1
β
i
β
j
hλ
y
i
Φ(·,y),λ
z
j
Φ(·,z)i
H
=
N
∑
i, j=1
β
i
β
j
a
i j
= β
T
Aβ.
This can be used, cf. (Giesl et al., 2018), to show that
the solution s
∗
of (12) is of the form
s
∗
(x) =
N
∑
j=1
β
j
λ
y
j
Φ(x,y), (13)
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
736

where the coefficients β
j
satisfy
minimize β
T
Aβ
subject to B
−
β = −1 ∈ R
M
and B
0
β ≤ 0 ∈ R
N
(14)
Here, the inequality is to be read componentwise, the
matrix elements a
i j
are defined by (5) and the matri-
ces by
A = (a
i j
)
i, j=−M+1,...,N
∈ R
(M+N)×(M+N)
=
A
11
A
12
A
21
A
22
B
−
= (a
i j
)
i=−M+1,...,0, j=−M+1,...,N
∈ R
M×(M+N)
=
A
11
A
12
B
0
= (a
i j
)
i=1,...,N, j=−M+1,...,N
∈ R
N×(M+N)
=
A
21
A
22
.
Since the λ
i
are linearly independent, the matrices A,
A
11
and A
22
are symmetric and positive definite, i.e.
in particular A
T
11
= A
11
and A
T
12
= A
21
, since they are
part of the symmetric matrix A.
Note that the optimization problem (14) is a clas-
sical quadratic optimization problem that can be effi-
ciently solved.
In our applications we choose X
−
= {x
0
} to be
one point (M = 1) and N further, pairwise distinct
points in the set X
0
. Recall that all points in X =
X
−
∪ X
0
are assumed not to be equilibria.
2.3 Iterative Averaging Method
In (Arg
´
aez et al., 2017; Arg
´
aez et al., 2018a; Arg
´
aez
et al., 2018b; Arg
´
aez et al., 2018c) the following ap-
proach was followed for computing CLF candidates
for the system (1): First, the ill-posed PDE
V
0
(x) = ∇V (x) · f(x) = −1
was discretized using meshfree collocation. The PDE
is ill-posed because on the chain-recurrent set, includ-
ing equilibria and periodic orbits, a function fulfill-
ing the PDE cannot exist. The approximation with
meshfree collocation fixes finitely many collocation
points X ⊂ R
n
, and computes the norm-minimal func-
tion such that V
0
(x) = ∇V (x)· f(x) is fulfilled at these
points. Thus, it delivers a solution, even if the under-
lying PDE does not have a solution. By evaluating the
solution v
1
to the discretized problem and analysing
where it does not fulfill the original PDE, one obtains
an estimate of the location of the chain-recurrent set.
As collocation points X = {x
1
,...,x
N
} ⊂ R
n
we use a hexagonal grid with fineness parameter
α
Hexa-basis
∈ R
+
, from which all equilibrium points
have been removed. This grid is described in detail in
(Giesl, 2007; Arg
´
aez et al., 2017) and has been shown
to deliver the optimal ratio of fill-distance and separa-
tion distance (Iske, 1998), which is desirable when
using RBF.
By iterating this method by using the average p(x)
of v
0
1
around x as a new right-hand side and solving
the PDE
V
0
(x) = p(x),
again using meshfree collocation, we obtain a new so-
lution v
2
which is a better CLF candidate than v
1
. In
practice one averages v
0
1
across an evaluation grid Y
x
j
around each collocation point x
j
∈ X and considers
the discrete generalized minimization problem
V
0
(x
i
) = p(x
i
). (15)
The evaluation grid is defined in (16), see (Arg
´
aez
et al., 2018c), where more details are available.
Y
x
j
=
(
x
j
±
r · k · α
Hexa-basis
·
ˆ
f(x
j
)
m
: k ∈ {1,..., m}
)
,
(16)
where r ∈ (0, 1) and m represent the amount of evalu-
ation points per collocation point.
This method is studied in detail in (Arg
´
aez et al.,
2017; Arg
´
aez et al., 2018a; Arg
´
aez et al., 2018b;
Arg
´
aez et al., 2018c) and we do not go into details
here. Just a few comments on the implementation:
First, it is advantageous to consider replacing the
system (1) by the ODE (17)
˙
x =
ˆ
f(x), where
ˆ
f(x) =
f(x)
p
δ
2
+ kf(x)k
2
(17)
with a small parameter δ > 0. This new ODE has
the same solutions as (1), but a more uniform speed.
This was shown to reduce the over-estimation of the
chain-recurrent set, i.e. the “noise” in the approxima-
tion. Further, as we show in Table 1, the condition
numbers of the matrix A in the generalized minimiza-
tion problem are several orders of magnitude lower
than when using (1).
Second, there are several choices of evaluation
grids possible. We use an evaluation grid aligned
along the flow at each collocation point for the iter-
ations (16), see (Arg
´
aez et al., 2018a).
Further, as we require ∇V (x) · f(x) ≤ 0 we replace
p(x
j
) by zero if the average of v
0
i
around x
j
is positive.
Third, to avoid the solutions v
i
to converge to the
zero function with growing i, we normalize the right-
hand side (15) over the iterations, i.e.
∑
N
i=1
p(x
i
) =
const.
Evaluation of Lyapunov Function Candidates through Averaging Iterations
737

3 EVALUATION METHOD
We first use the quadratic optimization method from
(Giesl et al., 2018) as described in Section 2.2 to com-
pute a CLF candidate v
1
. Then we apply the averaging
iterations, starting with this v
1
, as described in Section
2.3.
3.1 General Algorithm
Our general algorithm to compute CLFs can be sum-
marized as follows:
1. Create the set of collocation points X
−
=
{x
−M+1
,...,x
0
}, X
0
= {x
1
,...,x
N
}, and set X :=
X
0
∪ X
−
. Solve the quadratic optimization prob-
lem (14), obtaining v
i
with i = 1.
2. To determine the right-hand side of V
0
(x
j
) =
p(x
j
) for the next iteration define
˜r
j
=
1
|Y
x
j
|
∑
y∈Y
x
j
v
0
i
(y)
−
where x
−
= x if x < 0 and x
−
= 0 otherwise. Here
Y
x
j
is the evaluation grid corresponding to the col-
location point x
j
and |Y
x
j
| is its cardinality. Set
p(x
j
) = C ˜r
j
, where C = 1 if i = 1 and other-
wise C > 0 is a normalization constant such that
∑
N
j=−M+1
p(x
j
) is equal to the same sum from the
last iteration.
3. Solve the generalized interpolation problem
V
0
(x
j
) = p(x
j
),
as described in Section 2.1 to obtain a solution
v
i+1
.
4. Set i → i + 1 and repeat steps 2. and 3. until some
predefined criterion is reached.
The convergence of this algorithm is considered to
have been reached when a given number of iterations
have been performed or when a sufficiently good ap-
proximation to the CLF is achieved. To obtain an es-
timate of the location of the chain-recurrent set from
a solution v
i
we evaluate it on a fine Cartesian grid.
The set
{x : v
0
i
(x) ≥ −γ},
where γ ≤ 0 is some predefined parameter, is the ap-
proximation obtained from v
i
.
It is known from (Arg
´
aez et al., 2017; Arg
´
aez
et al., 2018a; Arg
´
aez et al., 2018b; Arg
´
aez et al.,
2018c) that if we run the algorithm above with v
1
as a
solution to the ill-posed PDE V
0
(x) = −1, and not the
solution to the quadratic optimization problem (14),
this will result in a sequence of solutions v
i
that give
successively better approximations of the location of
the chain-recurrent set. The question we investigate
in the next section is the following: if we start with v
1
as the solution to the quadratic optimization problem
(14) from (Giesl et al., 2018), then does the approx-
imation of the location of the chain-recurrent set im-
prove, or is the solution v
1
optimal in the sense, that
it cannot be improved by using averaging iterations.
3.2 Results
We consider three different planar systems from the
literature and in all the examples we use a hexag-
onal grid with fineness parameter α
Hexa-basis
∈ R
+
as
collocation grid X = X
0
, from which all equilibrium
points have been removed. In all the cases X
−
con-
sists of only one point x
0
. Furthermore, we use ψ
6,4
as Wendland function and two different support pa-
rameters, c = 1 and c = 0.1. Further, for determin-
ing the approximation to the chain-recurrent set we
used a Cartesian grid hZ
2
with h = 0.03 in all com-
putations and we set the parameter γ = 0. Finally, we
compared the chain-recurrent set obtained from the
solution v
1
to the quadratic optimization problem (14)
from (Giesl et al., 2018) (iteration 1) with v
10
, i.e. the
CLF candidate obtained from the algorithm in Section
3.1 after 10 iterations.
For each system we plot the CLF candidates v
1
and v
10
, their orbital derivatives, and the approxima-
tion of the chain-recurrent set obtained from the CLF
candidate.
3.2.1 Two Orbits
We consider system (1) with right-hand side
f(x,y) =
−x(x
2
+ y
2
− 1/4)(x
2
+ y
2
− 1) − y
−y(x
2
+ y
2
− 1/4)(x
2
+ y
2
− 1) + x
,
(18)
which has an asymptotically stable equilibrium at the
origin, an asymptotically stable periodic orbit with ra-
dius 1, and a repelling periodic orbit with radius 1/2.
The collocation points were set in (−1.5,1.5) ×
(−1.5,1.5) ⊂ R
2
and we used α
Hexa-basis
= 0.018,
which gives 32,064 collocation points. An extra
point, x
0
= (0.1,0) is added to fulfill the condition
v
0
(x
0
) = −1 during the quadratic optimization.
Figure 1 shows the plots for v
1
and figure 2 shows
the plots for v
10
. Both figures used c = 1 for system
(18). Likewise, figure 3 shows the plots for v
1
and
figure 4 shows the plots for v
10
. Both figures used
c = 0.1 for system (18).
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
738
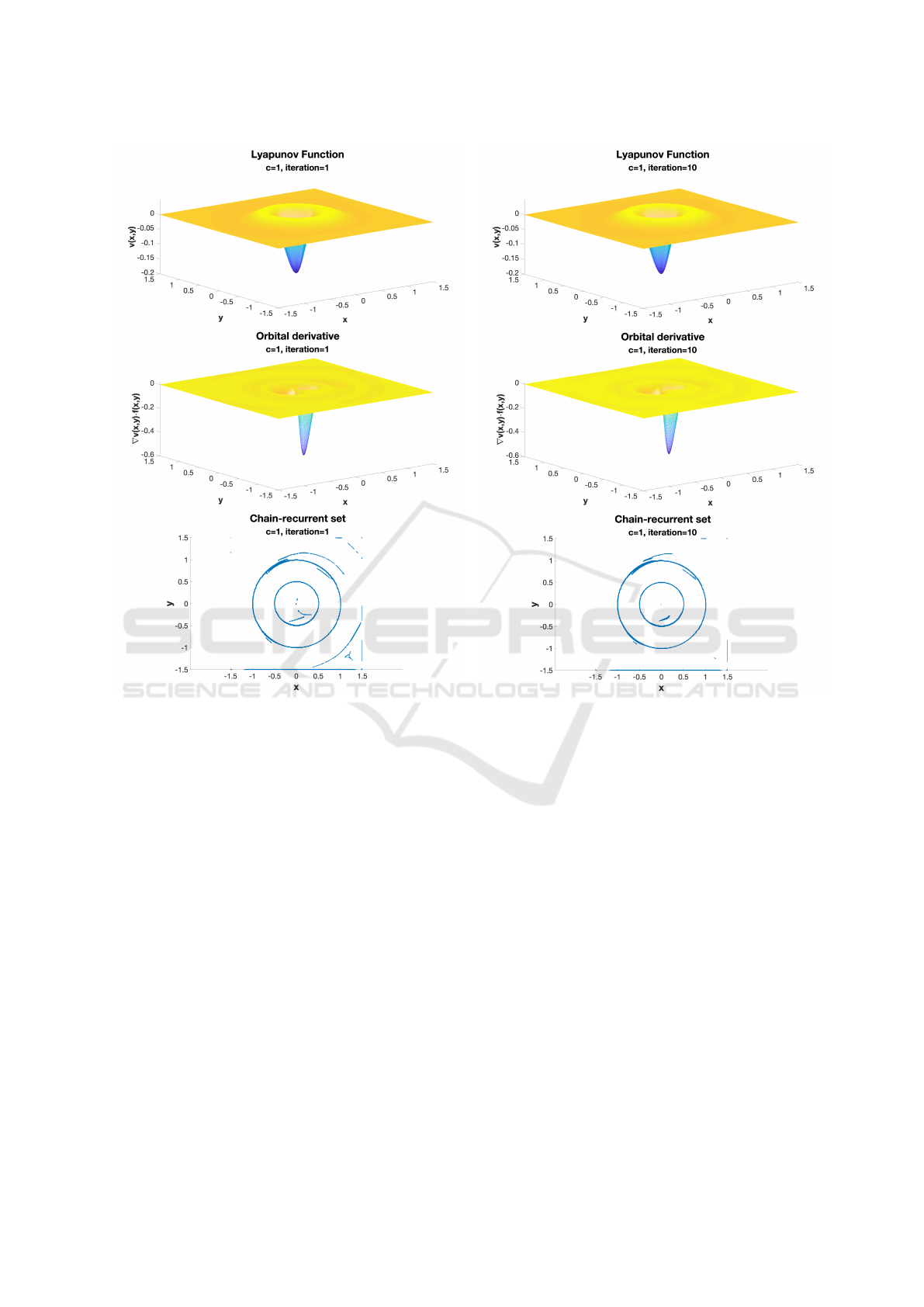
Figure 1: Above: Complete Lyapunov function. Middle:
Orbital derivative. Bottom: Chain-recurrent set. System
(18). First iteration, i.e., quadratic optimization. The nor-
malized method was used with c = 1 and δ
2
= 10
−8
.
3.2.2 Homoclinic Orbit
We consider system (1) with right-hand side f(x,y) =
x(1 − x
2
− y
2
) − y((x − 1)
2
+ (x
2
+ y
2
− 1)
2
)
y(1 − x
2
− y
2
) + x((x − 1)
2
+ (x
2
+ y
2
− 1)
2
)
.
(19)
This system has an unstable focus at the origin and
an asymptotically stable homoclinic orbit at a circle
centred at the origin and with radius 1.
The collocation points were set in (−1.5,1.5) ×
(−1.5,1.5) ⊂ R
2
with α
Hexa-basis
= 0.018, which gives
32,064 collocation points. An extra point, x
0
=
(0.1846,0) is added to fulfill the condition v
0
(x
0
) =
−1 during the quadratic optimization.
Figure 2: Above: Complete Lyapunov function. Middle:
Orbital derivative. Bottom: Chain-recurrent set. System
(18). Tenth iteration, i.e., iterative method solving the PDE
to the values of the average values of the orbital derivatives
around the corresponding collocation points. The normal-
ized method was used with c = 1 and δ
2
= 10
−8
.
3.2.3 Van der Pol Oscillator System
We consider system (1) with right-hand side
f(x,y) =
y
(1 − x
2
)y − x
. (20)
System (20) is the two-dimensional form of the Van
der Pol oscillator. This describes the behaviour of
a non-conservative oscillator reacting to a non-linear
damping. The origin is an unstable focus, and the sys-
tem has an asymptotically stable periodic orbit.
The collocation points were set in (−4,4) ×
(−4,4) ⊂ R
2
with α
Hexa-basis
= 0.05, which gives
29,440 collocation points. An extra point, x
0
=
(0.1,0) is added to fulfill the condition V
0
(x
0
) = −1
during the quadratic optimization.
Figure 5 shows the plots for v
1
and figure 6 shows
the plots for v
10
. Both figures used c = 1 for system
Evaluation of Lyapunov Function Candidates through Averaging Iterations
739
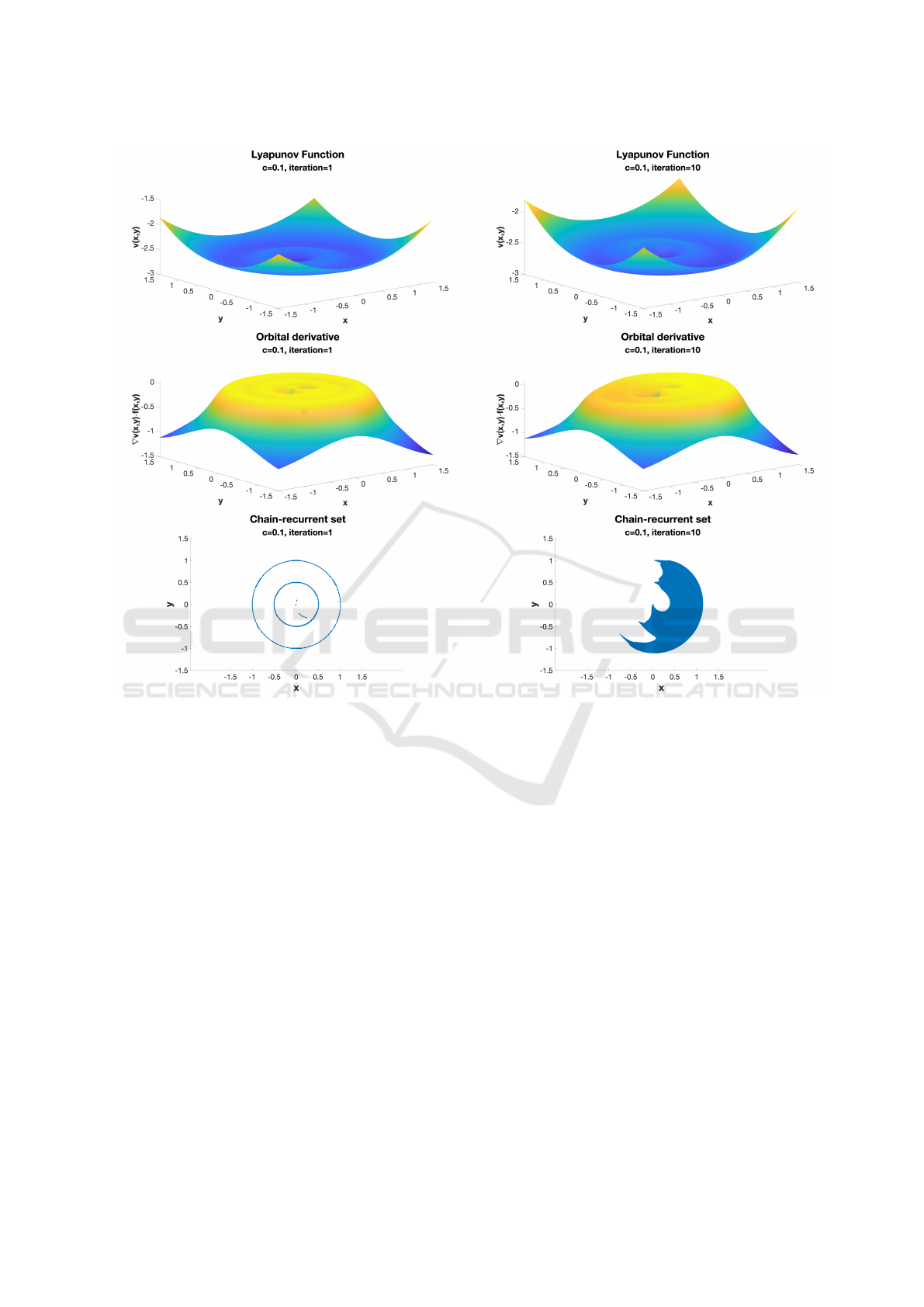
Figure 3: Above: Complete Lyapunov function. Middle:
Orbital derivative. Bottom: Chain-recurrent set. System
(18). First iteration, i.e., quadratic optimization. The nor-
malized method was used with c = 0.1 and δ
2
= 10
−8
.
(19). Likewise, figure 7 shows the plots for v
1
and
figure 8 shows the plots for v
10
. Both figures used
c = 0.1 for system (19).
Figure 9 shows the plots for v
1
and figure 10
shows the plots for v
10
. Both figures used c = 1 for
system (20). Likewise, figure 11 shows the plots for
v
1
and figure 12 shows the plots for v
10
. Both figures
used c = 0.1 for system (20).
3.3 Discussion of the Results
Let us discuss the results from our examples (18), (19)
and (20). Systems (19) and (20) do not show any im-
provement in the localization of the chain-recurrent
set when using iterations as seen in figures 5,6,7,8,9,
10, 11 and 12. System (18) shows slight improve-
ments, but only for c = 1. This clearly indicates that
the solution v
1
to the quadratic optimization prob-
lem (14) from (Giesl et al., 2018) cannot be improved
Figure 4: Above: Complete Lyapunov function. Middle:
Orbital derivative. Bottom: Chain-recurrent set. System
(18). Tenth iteration, i.e., iterative method solving the PDE
to the values of the average values of the orbital derivatives
around the corresponding collocation points. The normal-
ized method was used with c = 0.1 and δ
2
= 10
−8
.
by averaging iterations. We conclude that the norm-
minimization of the quadratic optimization problem
delivers a locally optimal solution, in the sense, that
averaging iterations do not improve the estimate of
the chain-recurrent set. Indeed, the estimates become
worse in most cases and, indeed, the approximation
form v
1
is quite good.
However, as solving the quadratic optimization
problem is much more computationally demanding
than solving a system of linear equations and iterat-
ing, one might try to obtain a solution v
1
using only
a few collocation points and then iterate on a denser
grid. We will investigate this in the future.
Even if in this paper we have presented all our re-
sults with the normalized method, it is very informa-
tive to have a look at the condition numbers of the
matrices involved in the examples, i.e. the matrix A
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
740
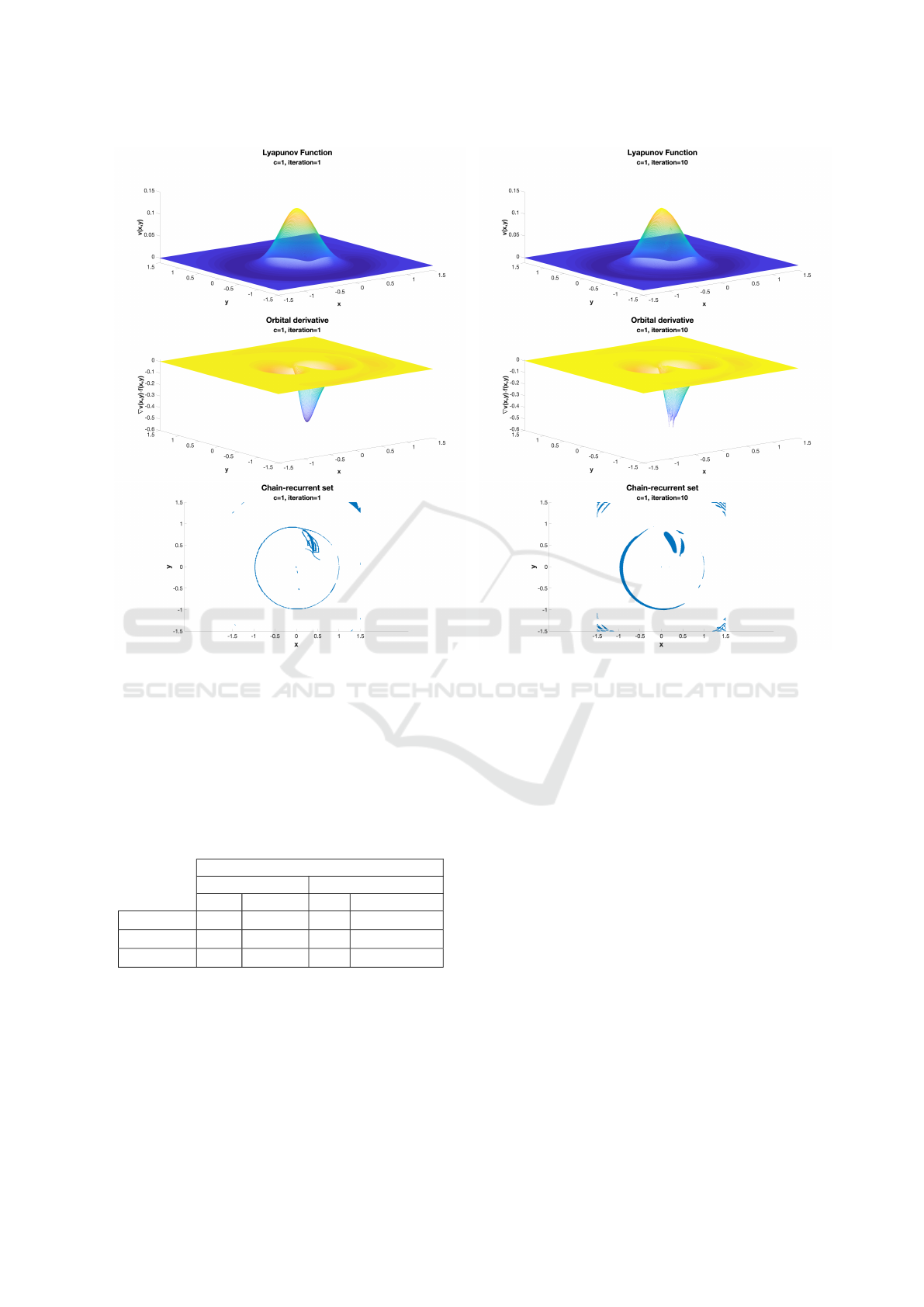
Figure 5: Above: Complete Lyapunov function. Middle:
Orbital derivative. Bottom: Chain-recurrent set. System
(19). First iteration, i.e., quadratic optimization. The nor-
malized method was used with c = 1 and δ
2
= 10
−8
.
from the collocation with and without the normalized
method.
Table 1: Condition number for the collocation matrices
computed for all systems under different values of c. Using
the system ODE directly on the left and normalized using
(17) on the right.
Condition number
Not normalized Normalized as (17)
c=1 c=0.1 c=1 c=0.1
ODE (18) 10
13
10
17
10
8
10
12
ODE (19) 10
15
10
19
10
8
10
12
ODE (20) 10
11
10
15
10
6
10
11
As it can be seen collocation matrices computed with
a Wendland function with support parameter c = 0.1
have much higher condition numbers, but this is to be
expected as there is more overlap of supports, the ma-
trix is less sparse, and the computed CLF candidate
is in general of much higher quality. The more inter-
esting observation is that using the normalization (17)
of the right-hand side of the ODE to obtain a system
Figure 6: Above: Complete Lyapunov function. Middle:
Orbital derivative. Bottom: Chain-recurrent set. System
(19). Tenth iteration, i.e., iterative method solving the PDE
to the values of the average values of the orbital derivatives
around the corresponding collocation points. The normal-
ized method was used with c = 1 and δ
2
= 10
−8
.
with a more uniform speed of traversing of trajecto-
ries delivers matrices with condition numbers that are
several orders of magnitude lower.
4 CONCLUSIONS
We investigated whether a complete Lyapunov func-
tion candidate computed by quadratic optimization
problem as in (Giesl et al., 2018) could be improved
by applying averaging iterations from (Arg
´
aez et al.,
2017; Arg
´
aez et al., 2018a; Arg
´
aez et al., 2018b;
Arg
´
aez et al., 2018c), which have been shown to de-
liver successively better approximations when start-
ing with an approximation to the ill-posed problem
V
0
(x) = −1. The result is that the complete Lyapunov
function candidate obtained by quadratic optimization
is locally optimal in the sense, that it cannot be im-
proved by these iterations.
Evaluation of Lyapunov Function Candidates through Averaging Iterations
741
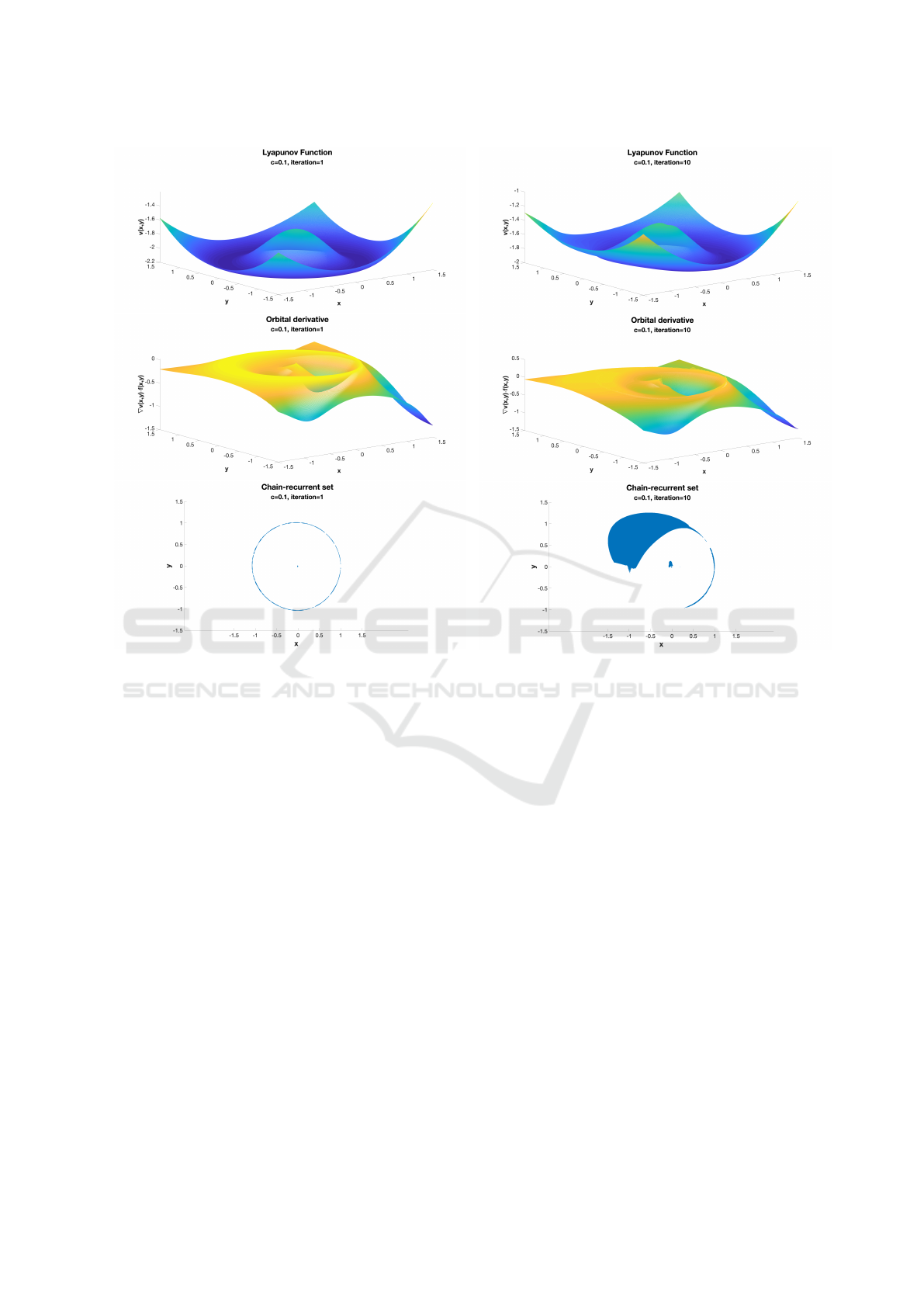
Figure 7: Above: Complete Lyapunov function. Middle:
Orbital derivative. Bottom: Chain-recurrent set. System
(19). First iteration, i.e., quadratic optimization. The nor-
malized method was used with c = 0.1 and δ
2
= 10
−8
.
ACKNOWLEDGEMENTS
The research in this paper is supported by the Ice-
landic Research Fund (Rann
´
ıs) grant number 163074-
052, Complete Lyapunov functions: Efficient numer-
ical computation.
REFERENCES
Arg
´
aez, C., Giesl, P., and Hafstein, S. (2017). Analysing
dynamical systems towards computing complete Lya-
punov functions. In Proceedings of the 7th In-
ternational Conference on Simulation and Model-
ing Methodologies, Technologies and Applications,
Madrid, Spain, pages 323–330.
Arg
´
aez, C., Giesl, P., and Hafstein, S. (2018a). Com-
putation of complete Lyapunov functions for three-
dimensional systems. In Proceedings of the 57th IEEE
Conference on Decision and Control (CDC), pages
4059–4064, Miami Beach, FL, USA.
Figure 8: Above: Complete Lyapunov function. Middle:
Orbital derivative. Bottom: Chain-recurrent set. System
(19). Tenth iteration, i.e., iterative method solving the PDE
to the values of the average values of the orbital derivatives
around the corresponding collocation points. The normal-
ized method was used with c = 0.1 and δ
2
= 10
−8
.
Arg
´
aez, C., Giesl, P., and Hafstein, S. (2018b). Computa-
tional approach for complete Lyapunov functions. In
Awrejcewicz J. (eds) Dynamical Systems in Theoret-
ical Perspective. DSTA 2017., volume 248. Springer
Proceedings in Mathematics and Statistics. Springer,
Cham.
Arg
´
aez, C., Giesl, P., and Hafstein, S. (2018c). Iterative
construction of complete Lyapunov functions. In Pro-
ceedings of 8th International Conference on Simula-
tion and Modeling Methodologies, Technologies and
Applications - Volume 1: SIMULTECH,, pages 211–
222. INSTICC, SciTePress.
Ban, H. and Kalies, W. (2006). A computational approach
to Conley’s decomposition theorem. J. Comput. Non-
linear Dynam, 1(4):312–319.
Bernard, P. and Suhr, S. (2018). Lyapunov functions of
closed cone fields: from Conley theory to time func-
tions. Commun. Math. Phys., 359:467–498.
Bj
¨
ornsson, J., Giesl, P., Hafstein, S., Kellett, C., and Li, H.
(2015). Computation of Lyapunov functions for sys-
tems with multiple attractors. Discrete Contin. Dyn.
Syst. Ser. A, 35(9):4019–4039.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
742
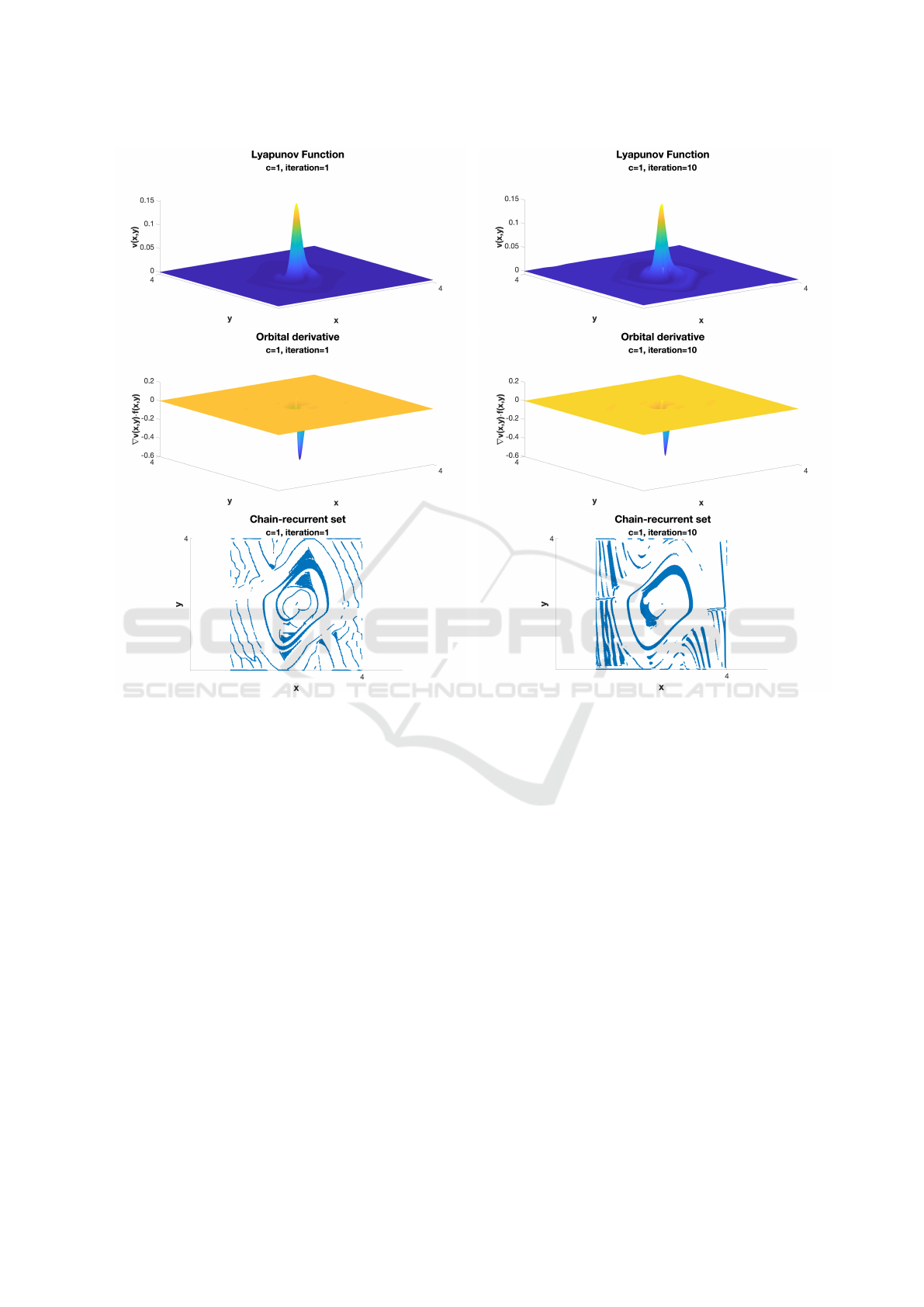
Figure 9: Above: Complete Lyapunov function. Middle:
Orbital derivative. Bottom: Chain-recurrent set. System
(20). First iteration, i.e., quadratic optimization. The nor-
malized method was used with c = 1 and δ
2
= 10
−8
.
Conley, C. (1978). Isolated Invariant Sets and the Morse
Index. CBMS Regional Conference Series no. 38.
American Mathematical Society.
Dellnitz, M., Froyland, G., and Junge, O. (2001). The algo-
rithms behind GAIO – set oriented numerical methods
for dynamical systems. In Ergodic theory, analysis,
and efficient simulation of dynamical systems, pages
145–174, 805–807. Springer, Berlin.
Fathi, A. and Pageault, P. (2019). Smoothing Lyapunov
functions. Trans. Amer. Math. Soc., 371:1677–1700.
Giesl, P. (2007). Construction of Global Lyapunov Func-
tions Using Radial Basis Functions. Lecture Notes in
Math. 1904, Springer.
Giesl, P., Arg
´
aez, C., Hafstein, S., and Wendland, H. (2018).
Construction of a complete Lyapunov function using
quadratic programming. In Proceedings of the 15th
International Conference on Informatics in Control,
Automation and Robotics (ICINCO 2018), pages 560–
568.
Giesl, P. and Wendland, H. (2007). Meshless collocation:
Figure 10: Above: Complete Lyapunov function. Middle:
Orbital derivative. Bottom: Chain-recurrent set. System
(20). Tenth iteration, i.e., iterative method solving the PDE
to the values of the average values of the orbital derivatives
around the corresponding collocation points. The normal-
ized method was used with c = 1 and δ
2
= 10
−8
.
error estimates with application to Dynamical Sys-
tems. SIAM J. Numer. Anal., 45(4):1723–1741.
Goullet, A., Harker, S., Mischaikow, K., Kalies, W., and
Kasti, D. (2015). Efficient computation of Lyapunov
functions for Morse decompositions. Discrete Contin.
Dyn. Syst., 20(8):2419–2451.
Hurley, M. (1992). Noncompact chain recurrence and at-
traction. Proc. Amer. Math. Soc., 115:1139–1148.
Hurley, M. (1998). Lyapunov functions and attractors
in arbitrary metric spaces. Proc. Amer. Math. Soc.,
126:245–256.
Iske, A. (1998). Perfect centre placement for radial ba-
sis function methods. Technical Report TUM-M9809,
TU Munich, Germany.
Kalies, W., Mischaikow, K., and VanderVorst, R. (2005).
An algorithmic approach to chain recurrence. Found.
Comput. Math, 5(4):409–449.
Narcowich, F. J., Ward, J. D., and Wendland, H. (2005).
Sobolev bounds on functions with scattered zeros,
Evaluation of Lyapunov Function Candidates through Averaging Iterations
743
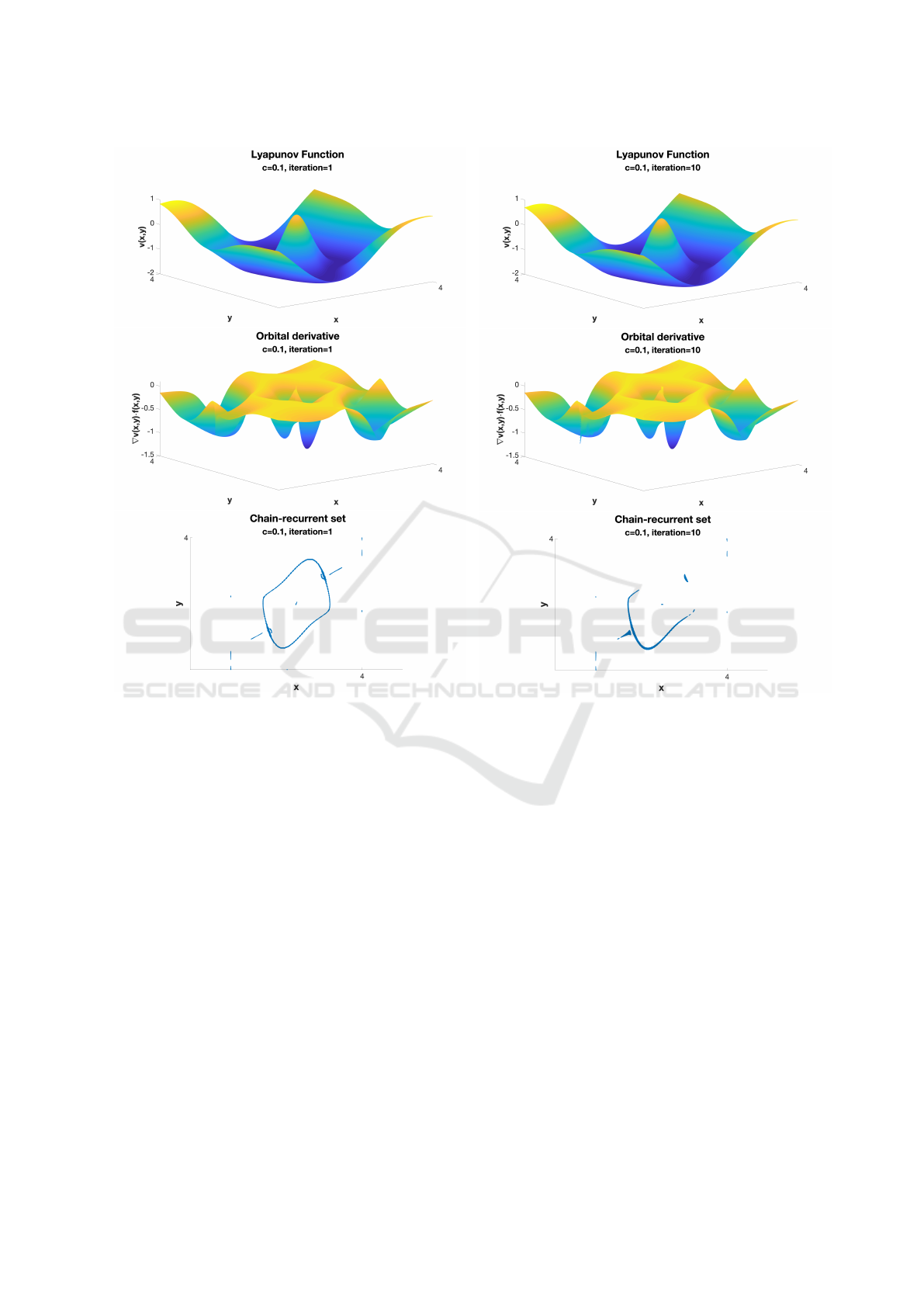
Figure 11: Above: Complete Lyapunov function. Middle:
Orbital derivative. Bottom: Chain-recurrent set. System
(20). First iteration, i.e., iterative method solving the PDE
to the values of the average values of the orbital derivatives
around the corresponding collocation points. The normal-
ized method was used with c = 0.1 and δ
2
= 10
−8
.
with applications to radial basis function surface fit-
ting. Mathematics of Computation, 74:743–763.
Suhr, S. and Hafstein, S. (2020). Smooth complete Lya-
punov functions for ODEs. submitted.
Wendland, H. (1995). Piecewise polynomial, positive defi-
nite and compactly supported radial functions of min-
imal degree. Adv. Comput. Math., 4(4):389–396.
Wendland, H. (1998). Error estimates for interpolation by
compactly supported Radial Basis Functions of mini-
mal degree. J. Approx. Theory, 93:258–272.
Wendland, H. (2005). Scattered data approximation, vol-
ume 17 of Cambridge Monographs on Applied and
Computational Mathematics. Cambridge University
Press, Cambridge.
Figure 12: Above: Complete Lyapunov function. Middle:
Orbital derivative. Bottom: Chain-recurrent set. System
(20). Tenth iteration, i.e., iterative method solving the PDE
to the values of the average values of the orbital derivatives
around the corresponding collocation points. The normal-
ized method was used with c = 0.1 and δ
2
= 10
−8
.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
744
