
ACO Algorithms to Solve an Electromagnetic Discrete Optimization
Problem
Anton Duca
1
and Ibrahim Hameed
2
1
Politehnica University of Bucharest, Faculty of Electrical Engineering, Bucharest, Romania
2
NTNU University, Faculty of Information Technology and Electrical Engineering, Alesund, Norway
Keywords: Ant Algorithms, Optimization, Non-Destructive Electromagnetic Testing (NDET), Inverse Problems.
Abstract: The paper proposes and studies the efficiency of the ant colony optimization (ACO) algorithms for solving
an inverse problem in non-destructive electromagnetic testing (NDET). The inverse problem, which consists
in finding the shape and parameters of cracks in conducting plates starting from the signal of an eddy
current testing (ECT) probe, is formulated as a discrete optimization problem. Two of the most widely
known ant algorithms are adapted and applied to solve the optimization problem. The influence over the
optimization algorithms performances of some problem specific local search strategies is also analyzed.
1 INTRODUCTION
Eddy Current Testing (ECT) is one of the most used
electromagnetic methods commonly employed in the
non-destructive evaluation of conductive materials
(Yusa et al., 2016). The ECT principle is based on
the interaction between induced eddy currents and
an examined conductive structure, interaction due to
the electromagnetic induction phenomena. The
method is applied in various application fields for
material thickness measurements, corrosion
evaluation, proximity measurements, and so on.
However, at the present time the most widely spread
area of application is the diagnosis and detection of
discontinuities in conductive materials. Real cracks
(such as stress corrosion cracks) usually appear in
steam generator tubes used in pressurized water
reactor of nuclear power plants (Yusa, 2017).
The Non-destructive Electromagnetic Testing
(NDET) inverse problem deals with the
identification of crack parameters using the ECT
measured signal (Yusa et al., 2016) (Yusa, 2017).
The optimization problem associated with the
inverse problem aims to minimize the difference
between the simulated signal corresponding to a
potential solution and the measured (real) signal.
Since deterministic methods can not be applied
because of multiple local minimum, heuristics based
methods, like genetic algorithms, tabu search,
particle swarm optimization, and so on, have
emerged as the standard techniques for solving these
non-convex and ill conditioned difficult inverse
problems.
The present paper proposes and deals with
studying and comparing the efficiency of ant
algorithms to solve the optimization problem
associated with the inverse NDET problem.
The first ant algorithm, the Ant System (AS),
was proposed by (Dorigo et al., 1996) and was
targeted towards hard non-determinist polynomial
(NP) combinatorial optimization problems such as
the Travelling Salesman Problem (TSP) (Stutzle,
Hoos, 1997) (Dorigo et al., 1999) (Ridge, Kudenko,
2007), Quadratic Assignment Problem (QAP)
(Stutzle, Hoos, 1997) (Dorigo et al., 1999) or
Multiple Knapsack Problem (MKP) (Fidanova,
2007) (Ke et al., 2013). The algorithm simulates the
behaviour of ants in real ant colonies when
searching for food. The ants are social insects which
communicate information about food sources using
a substance called pheromone, substance secreted
along their search path.
During time, to improve the performances of the
initial algorithm a significant number of solutions
have been proposed, the most notorious ant
algorithms being the Max-Min Ant System (MMAS)
(Stutzle, Hoos, 1997) and the Ant Colony
Optimization (ACO) (Dorigo et al., 1999). In the
same time several algorithms derived from ant
algorithms for combinatorial optimization have been
Duca, A. and Hameed, I.
ACO Algorithms to Solve an Electromagnetic Discrete Optimization Problem.
DOI: 10.5220/0009980001150122
In Proceedings of the 12th International Joint Conference on Computational Intelligence (IJCCI 2020), pages 115-122
ISBN: 978-989-758-475-6
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
115

proposed for continuous optimization problems
(ACOR) (Socha, Dorigo., 2008).
To solve the inverse NDET problem two
approaches will be studied: the first one is based on
an ant algorithm for continuous optimization
(ACOR) and the second is based on an algorithm
designated to combinatorial optimization (MMAS).
To speed up the optimization process and to
avoid getting trapped in local minimum points some
problem specific local search strategies are used to
enhance the ant algorithms when solving the inverse
NDET problem. The influence over the ant based
algorithms performances of the local search
frequency is also studied.
2 THE NDET PROBLEM
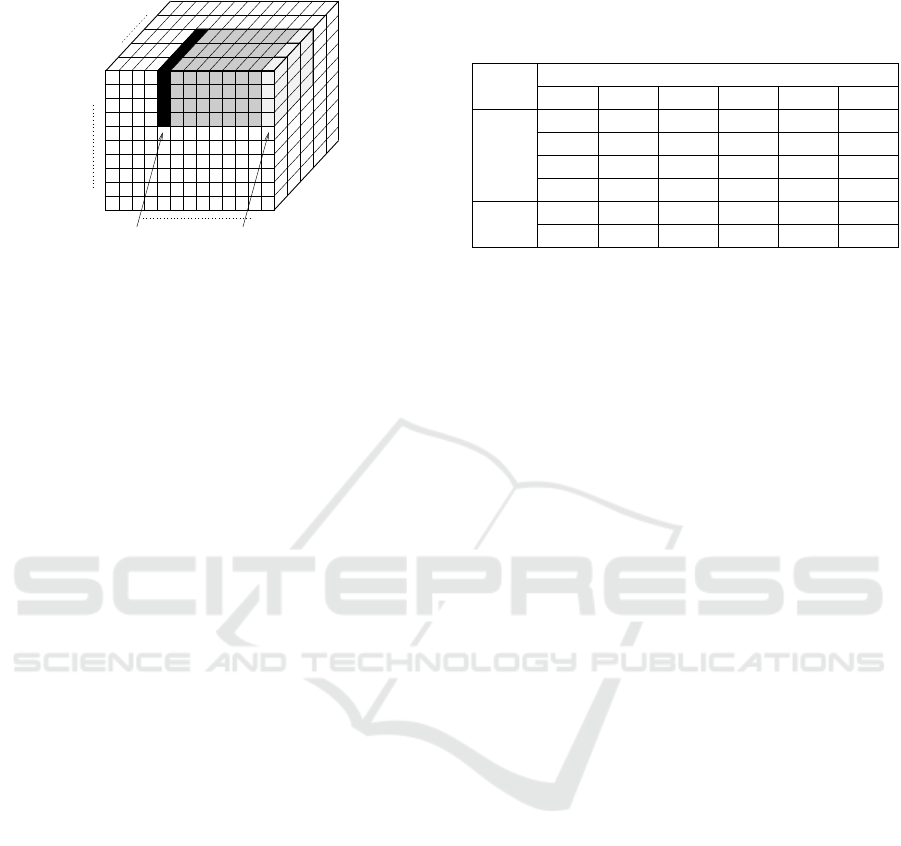
2.1 Tested Configuration
The problem used for testing is a slightly different
version of JSAEM (Japan Society for Applied
Electromagnetics) benchmark #2 similar with the
one in (Janousek et al., 2017). The non-magnetic
conductor (Ω
0
) surface is scanned using pancake coil
with a self-induction. The non-magnetic plate (40 x
40 x 1.25 mm
3
) has the conductivity =106 S/m and
contains one crack located in the region Ω
1
(10 x 1 x
1.25 mm
3
) divided uniformly in a grid of cells (13 x
5 x 10) (Figure 1). The cracks are cubes described
by 6 integer parameters, c=[ix
1
, ix
2
, iy
1
, iy
2
, iz, s], the
indices of the first / last cells along x [length] and y
[width], number of cell along z [depth iz], and
conductivity
c
= s % . The crack is considered as
having a uniform conductivity, zero or a percentage
from the plate conductivity.
Figure 1: Conductor plate with a crack.
2.2 ECT Signal Simulation
For the simulation of the ECT signals a fast FEM-
BEM solver is used (Chen et al., 1999) (Rebican et
al., 2006). The simulated ECT signals use a database
generated in advance for cracks with different
widths (Yusa et al., 2003), (Chen et al., 2006). To
calculate the ECT signal for a crack with the FEM-
BEM a linear equations system of small dimension
needs to be solved, corresponding to the finite
elements composing the crack. This leads to a
significant computational time decrease.
The optimization problem associated to the
NDET inverse problem has the following objective
function:
∆
∆
(1)
where c is the vector containing the crack
parameters, N
sc
is the scanning points number, and
Z
i
/ Z
i
true
are the simulated / measured coil
impedance variations in the i-th scanning point.
3 ACO ALGORITHMS
3.1 MMAS
The MMAS is an ant colony optimization algorithm
proposed by Stutzle and Hoos which proved its
efficiency on combinatorial optimization problem
such as TSP and QAP (Dorigo et al., 1999). As ACO
optimization algorithms, MMAS is based on the
natural phenomenon of ants forage for food. During
their search path ants create tours (graphs) on which
they deposit a substance called pheromone. An ant
movement along the edges of the graph is a
probabilistic decision based on the pheromone
information.
In practice MMAS is implemented as an iterative
stochastic algorithm with the next stages:
pheromone initialisation, tour (solution) construction
and evaluation, local search, pheromone
evaporation, pheromone deposit on the best global
route, pheromone limitation, and if necessary
pheromone reinitialization. The pseudocode of the
algorithm is as follows:
Ω
0
y
Scanning
x
Pancake coil
Ω
1
n
1
2
Crack
n
y
12
x
1
z
n
ECTA 2020 - 12th International Conference on Evolutionary Computation Theory and Applications
116

;initialize pheromones table
do
foreach ant of the colony
;construct solution
;evaluate solution
end for
;local search
;evaporate pheromones
;deposit pheromone for best ant
;apply correction to pheromones
foreach pheromone value
if pheromone <
τmin
pheromone = τmin
if pheromone > τmax
pheromone = τmax
end for
;reset pheromones if necessary
noIterations ++
while
(noIterations < maxNoIterations)
and
(optimal solution not found)
Pheromone Initialization. Each pheromone from the
pheromones table (graph) is assigned an initial value
which equals the maximum allowed value (
τmax).
This value is usually set to 1 / (ρ F
min) where ρ is the
evaporation rate and Fmin is the smallest value of the
objective function to be minimized.
Solution Construction. The ants construct an initial
solution starting from a random node. Starting from
a node an ant movement can be exploitative or
explorative. The decision is made using a random
number and an exploration threshold, which is a
parameter value of the algorithm. If the decision is
exploitation then the ant computes the probabilities
for choosing the next possible nodes in the graph
and choses the node with the highest probability.
The probability to choose a node j when starting
from a node i is:
p
ij
= ([τ
ij
]
α
[η
ij
]
β
)/( ∑
k
[τ
ik
]
α
[η
ik
]
β
),
(2)
where τ
ij
is the pheromone for the edge between the
nodes i and j, k is a node which can be selected from
the node i, and η is a heuristic information
representing the attractiveness of the move (in case
of TSP the length of the ij edge).
If the decision is exploration than the computed
probabilities are used as weights to choose the next
node using a probabilistic method such as wheel
selection.
Local Search. Local search is used to improve the
solution quality with neighbourhood strategies. Two
different approaches can be applied: a problem
independent heuristic (as tabu search), and secondly
some problem specific local search strategy.
Pheromone Evaporation. Each pheromone
corresponding to an edge of the graph is decreased
with the following formula:
τ
ij
= (1 – ρ) τ
ij
, (3)
where ρ is the evaporation rate.
Trail Update. Pheromone is deposited on all edges
connecting the components of the solution for the
best ant. There are the following approaches: the
best overall solution, or the best solution at the
current iteration and the best overall solution. The
update formula is:
τ
ij
= 1/F + τ
ij
, (4)
where F is the objective function value for the best
solution (in the case of TSP the length of the tour).
Pheromone Correction. In the case of MMAS, to
avoid the algorithm stagnation the pheromones are
limited to an interval [
τmin τmax]. The minimum and
maximum values of the pheromones are usually
chosen as:
τ
min
= 1/2n, τ
max
= 1 / (ρ Fmin),
(5)
where F
min is smallesr objective function value
(smallest length of tour for TSP) and n is the
problem size (number of cities for TSP).
Reinitialise Pheromones. Pheromone table can be
reinitialised if the algorithm stagnates and does not
improve the overall best after an imposed number of
iteration. The pheromone values are set to their
initial values
τmax.
3.2 ACOR
Proposed in (Socha, Dorigo., 2008) the ACOR
algorithm is an extension of ant based optimization
algorithms for continuous optimization problems.
ACOR is a population based algorithm which
stores the pheromones table as a solutions archive
(6). The solutions are ordered using their fitness
values in ascending order (f(s
k
) < f(s
k+1
)), where f: R
n
–> R is the objective function to be minimized. Each
ACO Algorithms to Solve an Electromagnetic Discrete Optimization Problem
117
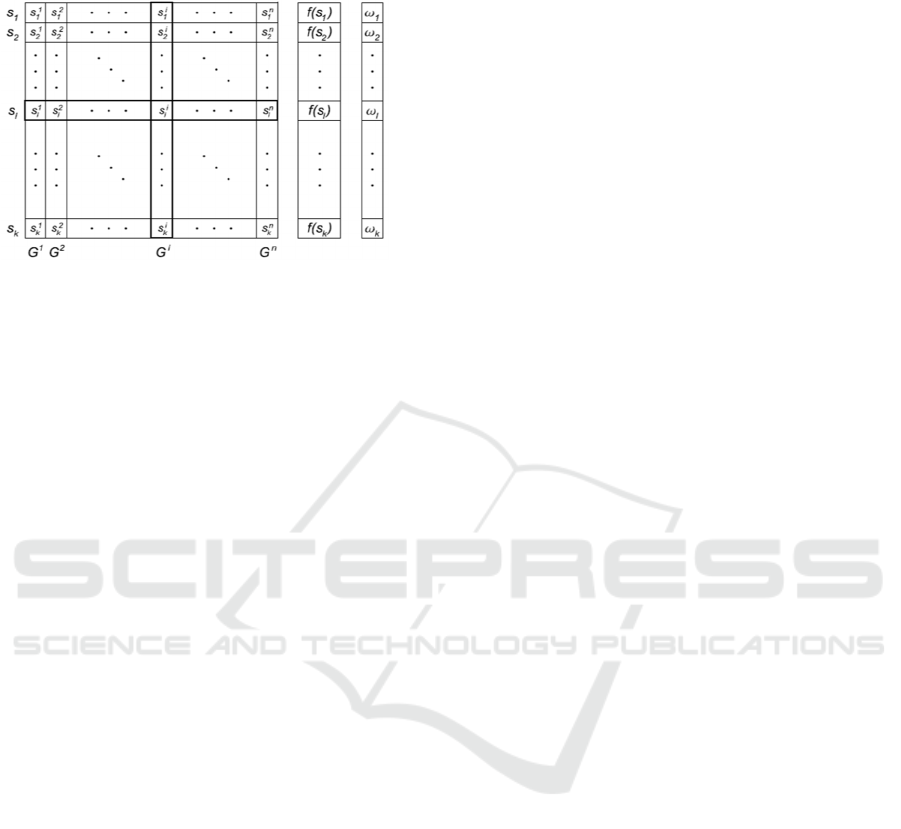
solution has an associated weight ω corresponding
to its fitness value (ω
k
> ω
k+1
).
(6)
Solution Construction. The construction of a new
solution starts from a solution l from the archive.
The lth solution can be chosen using a wheel
selection mechanism. The selection probability for
the lth solution is:
p
l
= ω
l
/ ∑
k
ω
k
.
(7)
After choosing the start solution, an ant constructs a
new solution in n steps. At each step i the ant
calculates a value for the corresponding optimization
variable using only information about the ith
dimension.
The new solutions are constructed using the
solution archive by calculating the parameters of the
Gaussian kernels G
k
(the number of the Gaussian
kernels is equal with the number of variables of the
optimization problem n). More details about
calculating the parameters of the Gaussian kernels
can be found in (Socha, Dorigo., 2008).
After constructing a set of solutions the
algorithm evaluates them, add them to the solution
archive, sorts the solutions archive according to the
fitness values, calculates weights and Gaussian
kernels, and in the end removes the worst solutions
by keeping the solutions archive size to a specified
number.
3.3 Ant Algorithms Approach for the
NDET Inverse Problem
The ant algorithms used for the inversion process
have to be customized for this type of NDET
problems. The ACO for continuous domains, such as
ACOR, store their pheromone table as a solution
archive and can simply be adapted to the discrete
optimization problem by rounding the coordinates
values before the evaluation of the objective
function.
The ant algorithms for combinatorial
optimization, such as MMAS and ACO, need
specific design modification to be used for the
NDET inverse problem.
The first design issue is to map the inverse
problem on a graph. This paper proposes the use of a
layered graph. Each layer in a graph corresponds to
a variable of the optimization function (a parameter
of the crack) and its vertices (the nodes) are given by
the number of possible values of the discrete
variable. The edges (the arcs) between the nodes of
different layers have assigned pheromone levels and
represent a possibility of choice: for example, an
edge between a node i from a layer x and a node j
from another layer y means that when constructing a
candidate solution after the parameter x has been
assigned a value i the parameter y might receive a
value j.
The second design issue is related to the tour
construction (candidate solution). At each step, in
order to move from a vertex to another an ant has to
compute a probability distribution (2). If in the case
of TSP the attractiveness was represented by the
distance between the two cities in our case the
proposed solution is to be the best value of the
objective function which was previously obtained
with that combination of parameter values.
The maximum and minimum values for the
MMAS pheromone levels will include the best value
of the objective function obtained at the current step
(instead of the length of the tour) and the number of
vertices in the graph. To avoid extreme cases the
objective function will be normalized and have a
minimum non-zero value.
The last issue is the local search methodology.
The proposed local search methods are NDET
problem specific, and they aim to avoid local
minima and increase the speed of convergence of the
inversion algorithm.
4 LOCAL SEARCH STRATEGY
Initially proposed in (Duca et al., 2014) and used in
conjunction with PSO (Particle Swarm
Optimization) (Kennedy, Eberhart, 1995) based
algorithms, and also successfully applied in (Duca et
al., 2014, 2) in conjunction with advanced PSO
algorithms (Sun et al., 2004) (Clerc, 2012) (Altinoz
et al., 2015), the local search methods are applied
after a number of iterations performed by the
optimization procedure. The local search strategy
generates 16 potential solutions starting from the
solution with the best fitness. A test point is
generated changing one parameter of the starting
ECTA 2020 - 12th International Conference on Evolutionary Computation Theory and Applications
118
point using expansion, contraction or displacement.
Figure 2: Negative displacement on OX for the crack c =
[6, 13, 1, 3, 4, 3].
The contraction / expansion can be performed
along the length (OX), width (OY) or depth (OZ),
but also conductivity. The contraction / expansion
operations generate 12 testing points, because the
operations can be applied in two different ways for
the length and width, changing ix1/iy1 or ix2/iy2.
The displacement can be performed for OX or for
OY axis but not for OZ (the crack always starts from
the plate surface). The displacement operation
generates four new testing points. Figure 2 shows a
negative displacement on OX performed on a crack
described by the parameters [6, 13, 1, 3, 4, 3].
5 RESULTS
In this paper, the inverse NDET problem is solved
using six different schemes: three MMAS schemes
(MMAS, MMAS with high frequency local search
MMAS-LS-hf, MMAS with low frequency local
search MMAS-LS-lf) and three ACOR schemes
(ACOR, ACOR with high frequency local search
ACOR-LS-hf, ACOR with low frequency local
search ACOR-LS-lf). For the schemes with high
frequency the local search is applied on the best
solution after each iteration of the algorithm, while
for the schemes with low frequency the local search
is applied after 80 evaluations of the objective
function (equivalent with 16 iterations for the ACOR
and 40 iterations for MMAS).
To compare the efficiency of the employed
schemes six inner defects (ID, the crack is on the
same side with the coil) are considered: four with
zero conductivity (ID1-ID4) and two with non-zero
conductivity (ID5-ID6, crack conductivity is 3% and
2% of the plate conductivity). The values of the
crack parameters are given in Table 1. For example,
ID4 has the length of 5.39mm (7cells x 0.77mm),
the width of 0.4mm (2cells x 0.2mm), the depth of
40% from the plate thickness (iz=4), and zero
conductivity (s=0).
Table 1: Cracks used for testing.
Crack
Crack parameters
ix
1
ix
2
iy
1
iy
2
iz s
ID1
4 10 2 4 5 0
ID2
5 9 1 5 3 0
ID3
3 11 2 3 2 0
ID4
4 10 3 4 4 0
ID5
4 10 2 4 5 3
ID6
3 11 2 3 2 2
To make a relevant statistical study, 30
numerical simulations (tests) were performed for
each crack reconstruction. After a previous tuning
the most suitable ACOR parameters were: archive
size 40, number of ants 5, locality of the search
process 0.01, convergence speed 0.85. The MMAS
parameters were chosen as suggested in (Ridge,
Kudenko, 2007): number of ants 2, alpha pheromone
term 4, distance heuristic term beta 3, exploration /
exploitation threshold 0.75, pheromone update
frequency for best so far 1, random chosen start
variable for solution construction, limits of trail
pheromone 0.01 and 2, number of iterations without
improvement (which resets the pheromone table) 10.
The optimization algorithms were stopped when
the exact solution was found (the objective function
is zero) or the algorithm completed a maximum
number of 1000 objective function (OF) evaluations.
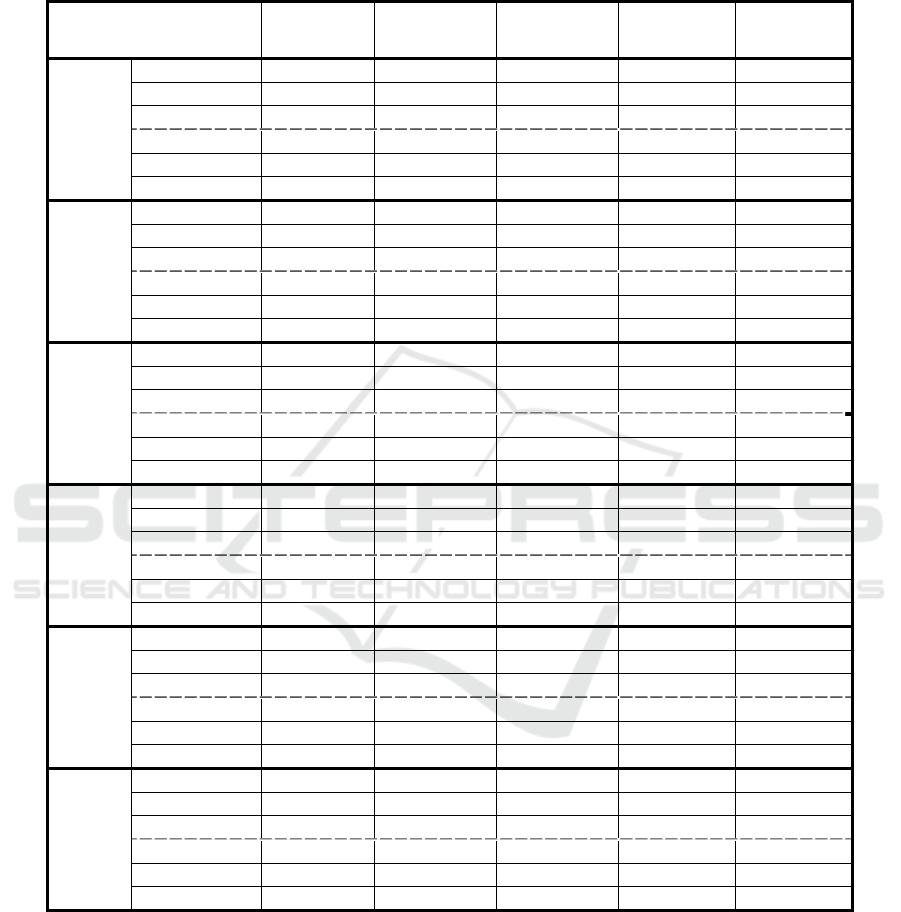
Table 2 (see Appendix) presents the numerical
results of the reconstructions as the minimum, the
maximum, the average value and the standard
deviation of the objective function for the best
solution for each of the 30 tests, and the number of
tests in which the exact parameters of the crack were
found (the exact fit).
The performances obtained with the ACOR
based algorithms outperform the ones with the
MMAS for all the six tested cracks. The local search
strategy improves the converge speed for both
algorithms. The inversion schemes when the local
search is applied with lower frequency performed
significantly better than the schemes with high
frequency, providing better average values and
higher number of exact findings. The exceptions are
in the case of ID6 and partially ID3 (for ACOR
algorithms) and ID3 (for the MMAS algorithms).
The improvements and superiority of the
algorithms with local search can also be seen from
mean-best evolution during the optimization process
(Figures 3-8). Besides the fact that statistical mean
values are smaller, the LS-lf algorithms are more
2n
x
nn
n
1
2
z
1
2
y
n
1
added cells eliminated cells
ACO Algorithms to Solve an Electromagnetic Discrete Optimization Problem
119
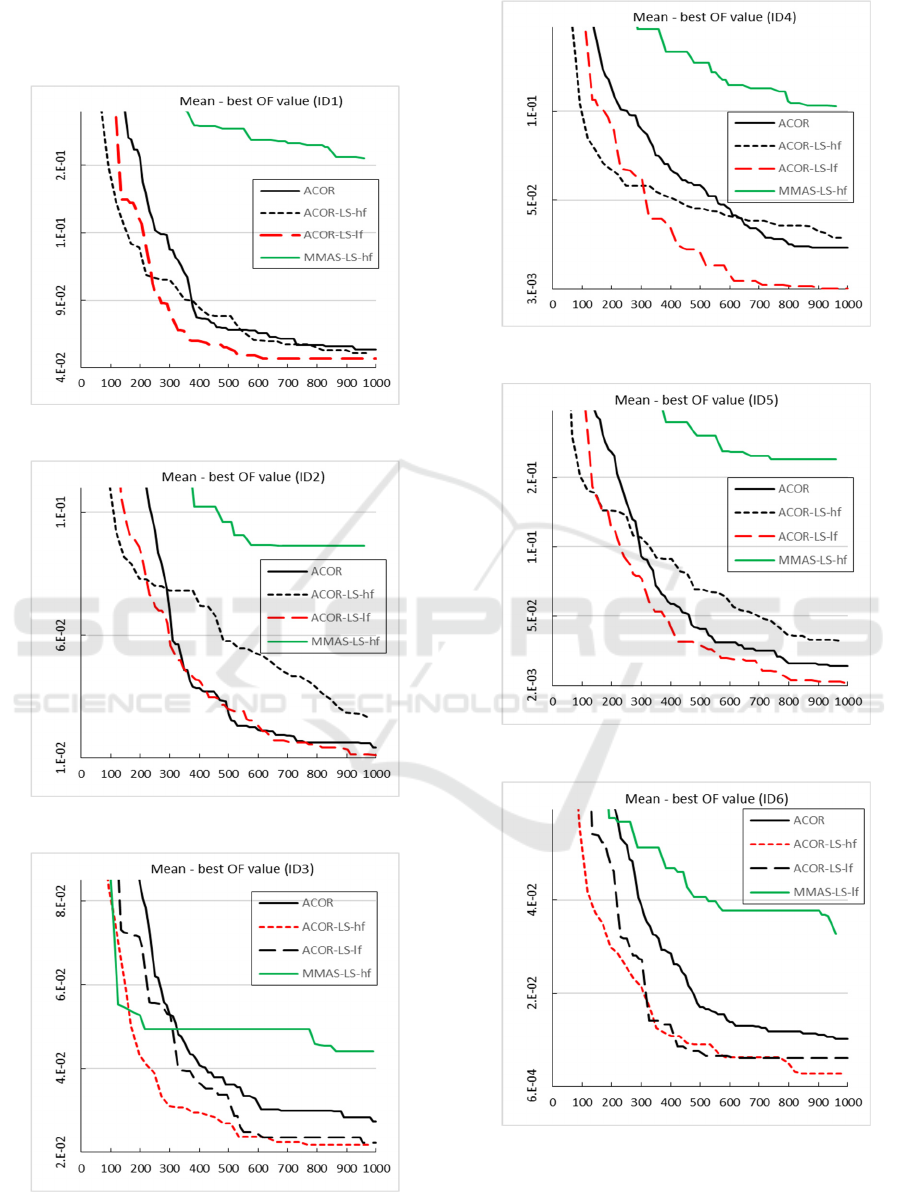
stable having a smoother evolution for the cracks ID
1/2/4/5, while the LS-hf algorithms perform better
for the cracks ID 3/6.
Figure 3: Mean-best OF value variation for test ID1.
Figure 4: Mean-best OF value variation for test ID2.
Figure 5: Mean-best OF value variation for test ID3.
Figure 6: Mean-best OF value variation for test ID4.
Figure 7: Mean-best OF value variation for test ID5.
Figure 8: Mean-best OF value variation for test ID6.
ECTA 2020 - 12th International Conference on Evolutionary Computation Theory and Applications
120

6 CONCLUSIONS
The paper studied the efficiency of ant based
algorithms used for the reconstruction of cracks
starting from the ECT signals supplied by a probe.
Two type of ant algorithms have been adapted and
analysed, ACOR for continuous domains and
MMAS for discrete optimization problems. The
paper also analysed the efficiency of the ant
algorithms in conjunction with some problem
specific local search methods aiming to enhance the
inversion process.
The schemes based on ACOR provide better
performances (higher number of exact findings and
smaller average and standard values for the objective
function) than the proposed MMAS schemes, for
both conductive and non-conductive cracks.
The ant algorithms enhanced with local search
strategies proved to be, by far, the best approach for
solving the inverse problem. The schemes enhanced
with local search significantly improve the
performances of both type of algorithms, ACOR and
MMAS, for cracks with zero or non-zero
conductivity. In terms of frequency, a lower
frequency use of the local search strategies seems to
be preferable to a high frequency, which seems to
lead to a premature convergence for most of the test
cases.
ACKNOWLEDGEMENTS
This paper was written in the frame of the EEA
Grants, project EEA-MG-RO-NO-2018-0069.
REFERENCES
Altinoz, O.T., Yilmaz, A.E., Duca, A. and Ciuprina, G.,
2015. Incorporating the avoidance behavior to the
standard particle swarm optimization 2011. Advances
in electrical and computer engineering, 15(2), pp.51-
59.
Chen, Z., Miya, K., Kurokawa, M., 1999. Rapid prediction
of eddy current testing signals using A-Φ method and
database. In NDT&E International, vol. 32, pp. 29-36.
Chen, Z., Rebican, M., Yusa, N., Miya, K., 2006, Fast
simulation of ECT signal due to a conductive crack of
arbitrary width. In IEEE Transactions on Magnetics,
vol. 42, pp. 683-686.
Clerc, M., 2012. Standard particle swarm optimization.
Open access archive HAL (http://clerc.maurice.
free.fr/pso/ SPSO_descriptions.pdf).
Dorigo, M., Maniezzo, V., Colorni, A. 1996. Ant system:
optimization by a colony of cooperating agents. In
IEEE Transactions on Systems, Man, and Cybernetics,
Part B (Cybernetics), 26(1), pp. 29-41.
Dorigo, M., Di Caro, G., 1999. Ant colony optimization: a
new meta-heuristic. In Proceedings of the Congress on
Evolutionary Computation, pp. 1470-1477.
Duca, A., Rebican, M., Janousek, L., Smetana, M.
Strapacova, T., 2014. PSO based techniques for NDT-
ECT inverse problems. In Electromagnetic
Nondestructive Evaluation (XVII), 39, pp.323-330.
Duca, A., Rebican, M., Duca, L., Janousek, L. and
Altinoz, T., 2014. Advanced PSO algorithms and local
search strategies for NDT-ECT inverse problems. In
International Symposium on Fundamentals of
Electrical Engineering (ISFEE), pp. 1-5.
Fidanova, S., 2007. Ant colony optimization and multiple
knapsack problem. In Handbook of Research on
Nature-Inspired Computing for Economics and
Management, pp. 498-509. IGI Global.
Janousek, L., Rebican, M., Smetana, M., Duca, A., 2017.
Diagnosis of real cracks from eddy current testing
signals using parallel computation. In Nondestructive
Testing and Evaluation, 32(4), pp. 435-443.
Ke, L., Zhang, Q., Battiti, R., 2013. MOEA/D-ACO: A
multiobjective evolutionary algorithm using
decomposition and antcolony. In IEEE transactions on
cybernetics 43, no. 6, pp. 1845-1859.
Kennedy, J., Eberhart, R., 1995. Particle swarm
optimization. Proceedings of IEEE International
Conference on Neural Networks, pp. 1942-1948.
Rebican, M., Chen, Z., Yusa, N., Janousek, L., Miya, K.,
2006. Shape reconstruction of multiple cracks from
ECT signals by means of a stochastic method In IEEE
Transactions on Magnetics, vol. 42, pp. 1079-1082.
Ridge, E., Kudenko, D., 2007. Tuning the performance of
the MMAS heuristic. In Engineering stochastic local
search algorithms. designing, implementing and
analyzing effective heuristics, pp. 46-60. Springer,
Berlin, Heidelberg.
Socha, K., Dorigo, M., 2008. Ant colony optimization for
continuous domains. In European journal of
operational research, 185(3), pp.1155-1173.
Stutzle, T., Hoos, H., 1997. MAX-MIN ant system and
local search for the traveling salesman problem. In
IEEE Evolutionary Computation, pp. 309-314.
Sun, J., Feng, B., Xu, W., 2004, Particle swarm
optimization with particles having quantum behavior,
in: IEEE Proceedings of Congress on Evolutionary
Computation, pp. 325–331.
Yusa, N., Chen, Z., Miya, K., Uchimoto, T., and Takagi,
T., 2003. Large-scale parallel computation for the
reconstruction of natural stress corrosion cracks from
eddy current testing signals. In NDT&E International,
vol. 36, pp. 449–459.
Yusa, N., Uchimoto, T, Kikuchi, H., (Eds.), 2016.
Electromagnetic Nondestructive Evaluation (XIX),
IOS Press.
Yusa, N., 2017. Probability of detection model for the
non-destructive inspection of steam generator tubes of
PWRs. In Journal of Physics: Conference Series, vol.
860, no. 1, p. 012032. IOP Publishing.
ACO Algorithms to Solve an Electromagnetic Discrete Optimization Problem
121
APPENDIX
Table 2: Objective function values and standard deviation for the NDET problem.
(Bold RED is the best algorithm option for a crack, bold GREEN is the best MMAS option for a crack)
Crack / Algorithm
Min-
b
est
OF value
(
× E-02
)
Exact fit
(OF=0)
Max -
b
est
OF value
(
×E-02
)
Mean -
b
est
OF value
(
× E-02
)
Standard
deviation
(
× E-02
)
ID1
ACOR 0 8 /30 10.87 5.35 3.57
ACOR-LS–hf 0 8 /30 10.87 5.11 3.37
ACOR-LS–lf 0 9 /30 13.41 4.71 3.39
MMAS 0 1 /30 45.31 24.68 10.95
MMAS-LS–hf 6.4 0 /30 49.08 22.56 10.29
MMAS-LS–lf 0 4 /30 49.08 19.51 11.43
ID2
ACOR 0 21 /30 6.22 1.40 2.36
ACOR-LS–hf 0 20 /30 15.40 2.62 4.45
ACOR-LS–lf 0 22 /30 5.35 1.12 2.16
MMAS 8.12 0 /30 25.62 17.96 5.00
MMAS-LS–hf 14.98 0 /30 36.89 18.88 6.42
MMAS-LS–lf 0 4 /30 19.43 9.64 6.28
ID3
ACOR 0 18 /30 7.23 2.25 2.99
ACOR-LS–hf 0 19 /30 7.22 1.68 2.39
ACOR-LS–lf 0 20 /30 7.22 1.73 2.64
MMAS 0 4 /30 11.43 7.36 3.28
MMAS-LS–hf 0 14 /30 16.09 3.92 4.17
MMAS-LS–lf 0 5 /30 9.64 5.50 2.78
ID4
ACOR 0 20 /30 10.40 2.65 4.01
ACOR-LS–hf 0 21 /30 16.16 3.19 5.09
ACOR-LS–lf 0 29 /30 10.39 0.35 1.90
MMAS 0 2 /30 25.02 15.84 5.83
MMAS-LS–hf 0 2 /30 29.51 15.00 5.96
MMAS-LS–lf 0 5 /30 19.57 10.56 5.93
ID5
ACOR 0 23 /30 10.64 1.63 3.09
ACOR-LS–hf 0 20 /30 19.25 3.41 5.54
ACOR-LS–lf 0 28 /30 7.46 0.34 1.43
MMAS 10.64 0 /30 43.22 21.62 6.80
MMAS-LS–hf 7.46 0 /30 24.09 21.57 3.37
MMAS-LS–lf 0 1 /30 24.09 16.49 6.55
ID6
ACOR 0 23 /30 5.08 1.08 2.06
ACOR-LS–hf 0 28 /30 5.10 0.34 1.29
ACOR-LS–lf 0 26 /30 5.05 0.67 1.74
MMAS 0 1 /30 13.08 8.02 3.34
MMAS-LS–hf 0 5 /30 12.08 6.26 4.03
MMAS-LS–lf 0 9 /30 5.10 3.34 2.35
ECTA 2020 - 12th International Conference on Evolutionary Computation Theory and Applications
122
