
Implementation and Simulation of Handover Techniques to Guarantee
Service Continuity through Microservices at Edge
Luigi Bitonti and Mauro Tropea
Dimes Department, University of Calabria, Via P. Bucci 39/c, 87036 Rende (CS), Italy
Keywords:
Automotive, Edge Computing, Collision Avoidance.
Abstract:
Edge computing is a mesh network of micro data centers, capable of processing and storing critical data locally,
and of transmitting all data received and / or processed to a central data center or to a cloud storage repository.
With this paradigm, data, applications and computational services are brought from the cloud servers to the
margins of the network. To divide their computational power, virtual hosts are distributed within a single
physical host through virtualization. One of the virtualization techniques that is spreading is containerized
programming. In this paper, the concepts just mentioned will be applied to a use case, to ensuring continuity
of service to vehicles traveling on a fast-moving road and which are managed by Edge technology. Two
handover algorithms supported by microservices at Edge are proposed and performance assessed.
1 INTRODUCTION
A cellular telecommunication network is a communi-
cation network that has the last link wireless and is
distributed geographically in areas called cells, each
served by at least one fixed-location transceiver called
Base Transceiver Station (BTS). The division of ter-
ritory into cells allows to guarantee the service to a
large number of users with a single BTS that operates
the frequency reuse. When a mobile terminal is on the
edge of a cell, it starts a control mechanism in order
to check a signal with a greater power by a different
BTS. If the mobile terminal finds a new BTS with a
stronger power, it performs a procedure called han-
dover (Salihin et al., 2018). There are also four basic
techniques for handover: 1) Received signal strength
(RSS); 2) RSS with threshold; 3) RSS with hystere-
sis; 4) RSS with hysteresis and threshold. Based on
the handover metrics mentioned above, the decision
about how and when to switch the interface to which
network will be made.
Edge computing (Khan et al., 2019) has gained
considerable popularity in academic and industrial
sector in the last few years. It serves as a key en-
abler for many future technologies like 5G, Inter-
net of Things (IoT) (Shah and Yaqoob, 2016), aug-
mented reality and vehicle-to-vehicle communica-
tions by connecting cloud computing facilities and
services to the end users. And, a particular attention
has been addressed to security aspects of these tech-
nologies (Santamaria et al., 2019; Santamaria et al.,
2018). The Edge computing paradigm provides low
latency, mobility, and location awareness support to
delay-sensitive applications. The cell permanence
time and the mobile analysis for predictive services
are important aspects in wireless networks and they
are object of study by research communities, such as
it possible to view in (De Rango et al., 2008), (Fazio
et al., 2017), (Frnda et al., 2013).
In this work, we have considered as scenario a
Vehicular Ad-Hoc Network (VANET) (Ghori et al.,
2018) where the mobile device supports simultane-
ous connection to multiple access points. Some stud-
ies show the importance of prediction in handover
mechanism for guaranteeing QoS such as (Fazio et al.,
2016). During the handover process, there is no inter-
ruption of the service, given that the device remains
connected to at least one access point. Very studied
aspects for the ad-hoc network are routing issues as
it is possible to view in (Zhou et al., 2006), (Fotino
et al., 2007), (Socievole et al., 2011), and also for
VANET is an important topic as it is possible to view
in (De Rango et al., 2009), (Fazio et al., 2013). More-
over, in the considered scenario the support of edge
computing (Pan and McElhannon, 2017; Khan et al.,
2019) has been considered in order to permit the com-
munication in the vehicular environment taking into
account the latency, that can play an important role for
avoiding vehicles accidents. In this work, as edge de-
vice has been chosen the cellular BTS that is placed at
Bitonti, L. and Tropea, M.
Implementation and Simulation of Handover Techniques to Guarantee Service Continuity through Microservices at Edge.
DOI: 10.5220/0009971002870293
In Proceedings of the 10th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2020), pages 287-293
ISBN: 978-989-758-444-2
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
287
roadside and then it can assist the vehicles that mov-
ing in the road. The BTSs long the road are numer-
ous and then, they can collaborate each other in order
to guarantee service continuity to the mobile devices,
avoiding any form of interruption. In this work, a so-
lution has been proposed to guarantee the continuity
of the service in an automotive environment managed
with Edge Computing technology (Klas, 2017). This
technology was chosen because of its low latency and
high reliability properties in respect to Cloud architec-
ture (Pan and McElhannon, 2017). Docker containers
were used to develop the servers to make applications
light and (Doan et al., ). In this way, if the servers
do not need to use all their resources to satisfy the re-
quests, they could also be used by other clients. The
servers have been grouped in a Cluster, to be man-
aged efficiently. Kubernetes was used to orchestrate
the Cluster containers and to make the system robust
(Bachiega et al., 2018). To ensure the continuity of
the service, two handover algorithms have been im-
plemented. The first algorithm is based on the thresh-
old RSS technique, the second one adds Cell Breath-
ing Mechanism. The proposed mechanisms have been
implemented in Java, taking advantage of libraries
and tools adapted to the context.
The rest of this paper is organized as follows: Sec-
tion 2 presents the proposal of guaranteeing service
continuity to vehicles on the road managed by Edge
technology. In Section 3, a description of the sim-
ulator and the implementation details are given. In
Section 4, we describe the numerical results. Finally,
Section 5 concludes the paper.
2 PROPOSED SOLUTION
The roadside BTSs communicate with each others
thanks to the transport infrastructure backbone. By
taking advantage of 5G networks, latencies are re-
duced to about 15 ms (Erel-
¨
Ozc¸evik and Canberk,
2019). In this work, a smart BTS equipped with a pro-
cessing unit has been considered able to perform data
elaboration and then, to make decisions analyzing ob-
tained results on the basis of the proposal algorithm.
In this way, the BTS is also able to evaluate if it has to
propagate messages arriving from previous BTSs to-
wards the next BTSs or to stop forwarding because it
is not necessary. To apply this behavior the following
considerations can be made: all vehicles registered
with the BTS are tracked; if the last vehicle needs to
be notified, then the message must be propagated to
the adjacent BTS; vice versa, if the last vehicle is at
a distance from the event such that the warning is not
necessary, then it is useless to forward the message to
the adjacent BTS, because surely the vehicles under
its range will be far enough, and then it is not neces-
sary the use of the edge.
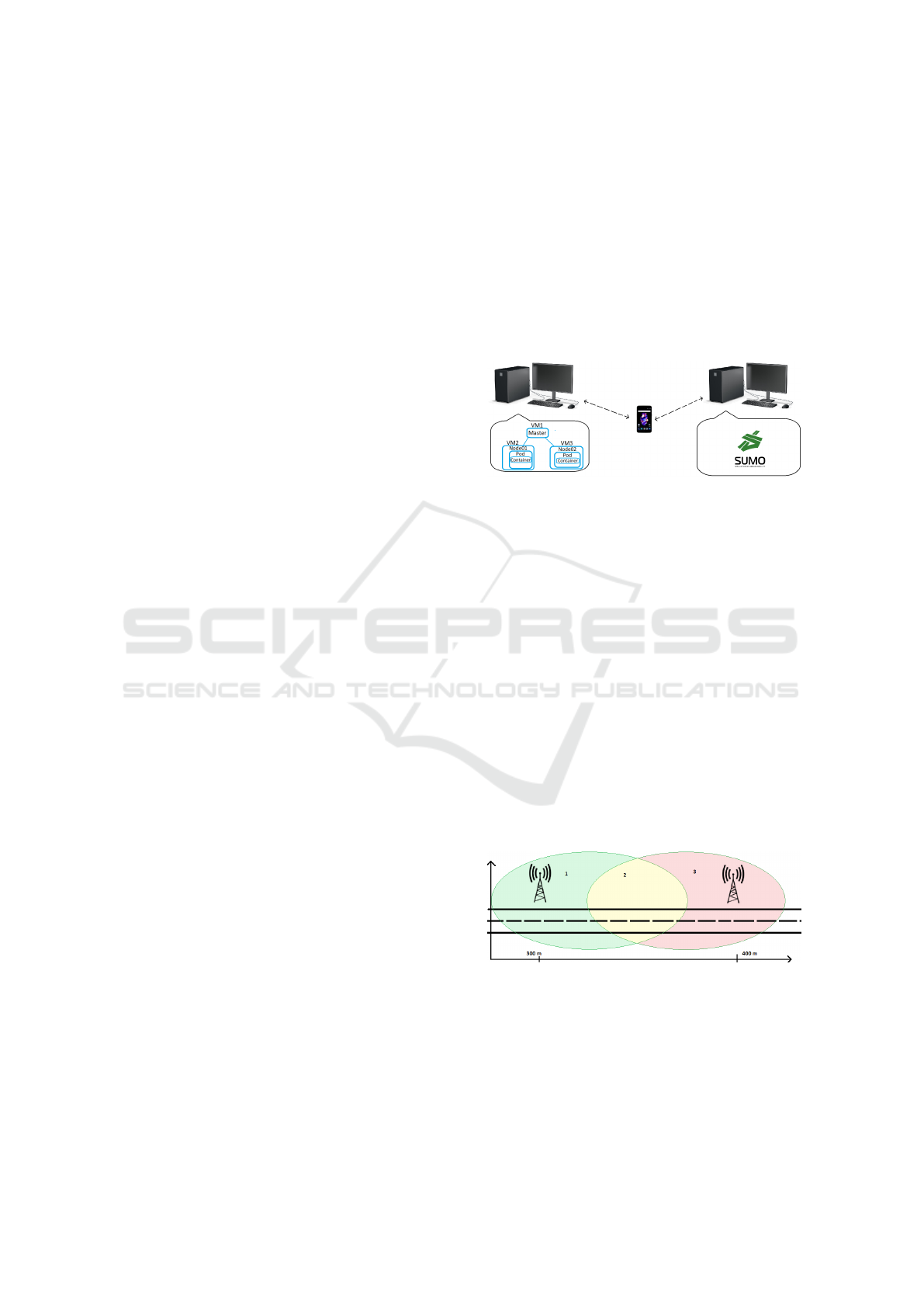
To implement handover processes it was neces-
sary to create two servers that work in parallel, able
to simulate two different BTSs. This was applied con-
sidering three virtual machines able to form the Ku-
bernetes cluster: one machine has been used as a mas-
ter; other two as worker nodes. The virtual machines
were hosted on a normal PC, as it is possible to view
in Figure 1.
Figure 1: Architectural Scheme.
An urban mobility simulator, SUMO, was used to
generate data from vehicles (Lim et al., 2017). SUMO
is an open source software that allows to create vari-
ous traffic scenarios. This simulator was used to have
the most realistic data possible. It is also possible
to interface the simulator with the Java programming
language, thus making it easier to collect vehicle data
at runtime. The simulator runs on an other PC differ-
ent to the one hosting containers, as it is possible to
view in Figure 1.
For the sake of simplicity, it is assumed that all
cars travel in one direction. To facilitate the simula-
tion and make it faster, the two servers are supposed
to be at a distance of 100 meters from each other and
their coverage range is 90 meters. In this way, it is
possible to know what happens during handover since
the vehicles remain in the area covered by both nodes
for a sufficiently long time, see Figure 2.
Figure 2: Considered Test Environment.
In Figure 2, it is possible to note three different zones:
1) zone covered by first server; 2) zone covered where
a mobile device can be covered by both first and sec-
ond server, here takes place the handover mechanism;
3) zone covered by only second server.
SIMULTECH 2020 - 10th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
288

2.1 Docker and Kubernetes
Docker is an open source platform that allows to
develop and to run applications (doc, 2019). With
Docker it is possible to keep applications separate
from the hosting infrastructures, to make software
distribution possible quickly and easily using a struc-
ture called container. Kubernetes is a portable, ex-
tensible and open source platform useful for manag-
ing workloads and services developed with containers
(kub, 2019). An important concept in Kubernetes is
the cluster. It is a set of machines hosting container-
ized applications, where at least a machine is a mas-
ter node (controlling and managing operations) and
another one is a worker node (run the master instruc-
tions). The smallest unit that constitutes a Kubernetes
application is represented by the Pod, that represents
the processes running on the cluster.
2.2 Vehicle Traffic Simulator
Through the TraaS library it was possible to interface
SUMO with Java (sum, 2019), (tra, 2019), (Artal-
Villa et al., 2019). Eclipse was used as a development
environment. For vehicle configuration and simula-
tion, XML language files have been written. For each
vehicle, the IDentifier (ID) number, speed and posi-
tion are taken. These parameters are formatted ac-
cording to a specific code, so as to be made legible
by the receivers. When the vehicle is in an area cov-
ered by both BTSs, the vehicle sends the message
to both, thus simulating the mechanism of macro-
diversity. Macro-diversity is a mechanism introduced
in UMTS networks through which it is possible to be
connected simultaneously to more than one cell (Ges-
bert et al., 2010). In any case, although the vehicle is
connected to both stations, only one is used to warn it
with warning messages. The choice on which the two
stations should have the control is made by the sta-
tions themselves and the algorithm, shown later, will
explain it. When the vehicle no longer receives the
signal from a station, it communicates this condition
to the one whose signal it is currently receiving, in
order to warn it of the new condition. In this way, a
soft handover was carried out: the vehicle passes un-
der control of a new station without remaining always
connected to the network. The continuity of the ser-
vice is thus guaranteed. The Constrained Application
Protocol (CoAP) was used to communicate with the
servers.
3 SOFTWARE
IMPLEMENTATION
The servers were implemented in Java language and
use the CoAP protocol (cal, 2019) to communicate
with the vehicles or other servers. For the manage-
ment of handover, two paradigms were used: a RSS
with threshold technique and a combination of RSS
with threshold and cell breathing. An explanation of
the type of messages that can be generated by the sys-
tem and a description of both algorithms will now be
given. Messages can be classified into five different
typologies:
• Type 0: it is the most used type of message. It
is a periodic message that each vehicle sends to
its reference server to update it on its speed and
position;
• Type 1: this message is sent from one server to
another upon it is detected a particular event;
• Type 2: it is sent from the vehicle to the server
for notifying handover end. The vehicle switches
from the old server to the new one;
• Type 3: it is a message that arises from the receipt
of a type 2 message. It is used to notify to the old
server that a vehicle is disassociated from it (the
old server removes it from its database);
• Type 4: it is the only message used in the second
handover implementation for communicating to a
server that its coverage range is decreasing.
Thanks to the exchange of these messages the soft
handover can be used and then a vehicle can pass
from a coverage area served by a BTS to the new area
served by another BTS able to manage the mobile de-
vice. In the following the two approaches, with a RSS
threshold and with cell breathing mechanism are de-
scribed and compared in order to show the behavior
of the proposal algorithms.
3.1 BTS with RSS Threshold
Mechanism
In this scenario, the server continually receives mes-
sages from vehicles that are under its coverage. To be
initialized, the server must know the location/position
of the neighbor server, its IP address, the port on
which to send the data and the range of coverage. Tak-
ing into consideration Figure 2, it is assumed that if
the vehicle is inside zone 2, it is in a location where
it can receive a signal from the radio base station 1
whose power is above of the acceptable threshold. In
zone 3, the signals from server 1 can no longer be
processed. The mechanism adopted for performing
Implementation and Simulation of Handover Techniques to Guarantee Service Continuity through Microservices at Edge
289
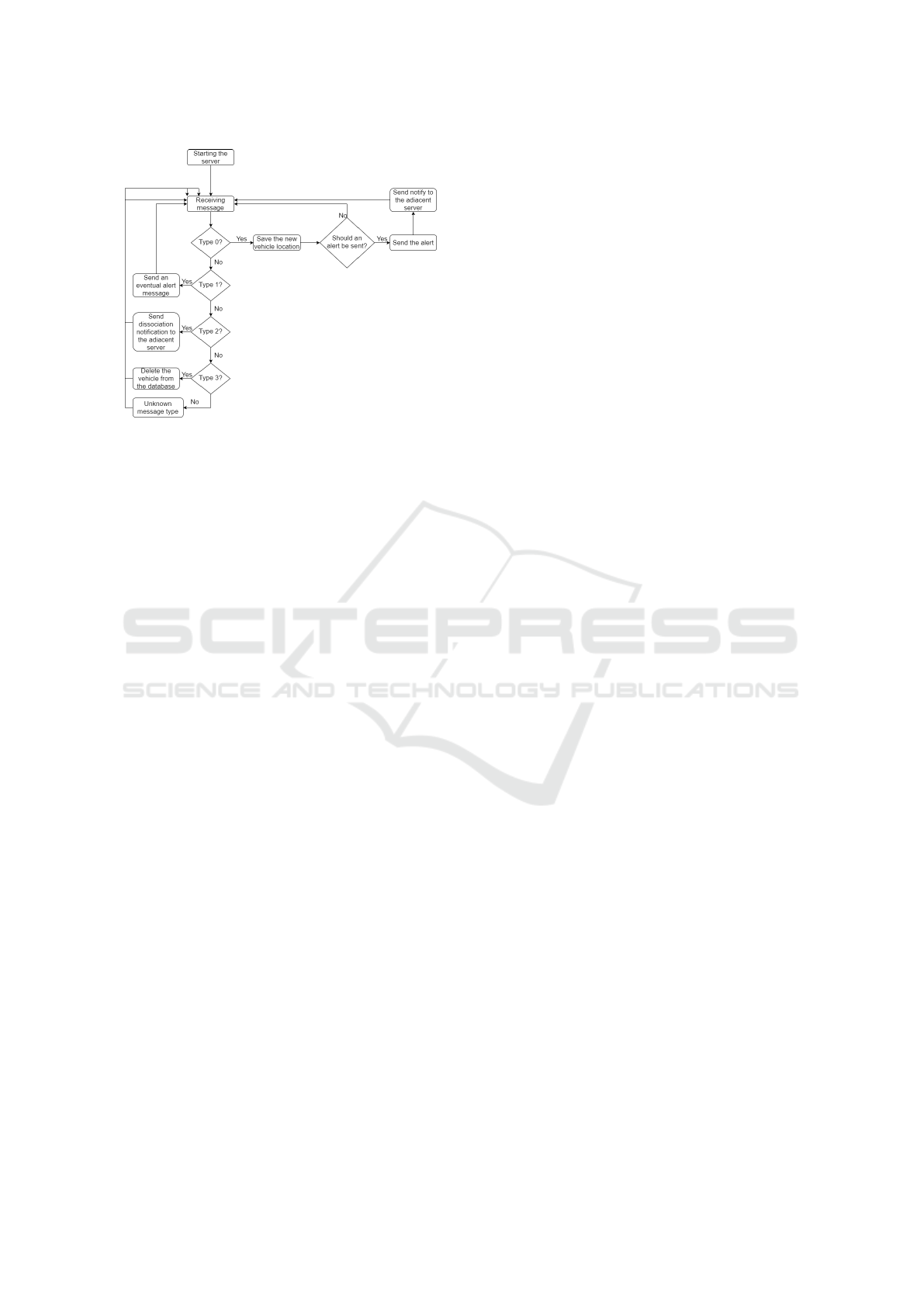
Figure 3: Flowchart of a server with RSS control mecha-
nism.
handover is based on RSS technique, a mechanism
well known in cellular networks (Tinkhede and In-
gole, 2014). When a vehicle receives a Type 0 mes-
sage, the vehicle’s position is saved. In this way the
server is aware of the presence of this vehicle under
its coverage. When a vehicle is in an alert condition,
such as a sudden braking, the server will notify all the
vehicles under its coverage and in the vicinity of the
vehicle that caused the alert generation. In the case
of server 2, it will send a notification only to vehicles
in zone 3. Server 1, on the other hand, takes care of
vehicles in zone 1 and zone 2. Server 2 also sends a
Type 1 message to server 1 to inform it that a vehi-
cle under its coverage has made an emergency stop.
When a Type 1 message is received, the server must
check whether the vehicles under its control are near
the vehicle that has braked sharply. If so, it forwards
a message to these vehicles suggesting them of brak-
ing. In this way, thanks to the collaboration between
the two servers, it was possible to avoid potential ac-
cidents. Upon receiving a Type 2 message, the server
becomes aware that the vehicle is under its control,
since it is in a position such that the signal strength of
the server 1 is below a certain threshold. Therefore,
it sends a Type 3 message to the adjacent server, to
inform of this new condition. The message contains
the ID of the vehicle under handover process. When
a server receives a Type 3 message, it is informed that
a vehicle is no longer under its management. It can
therefore proceed with the removal of the data relat-
ing to it, not more necessary. Hereafter, the server will
no longer exchange messages with this vehicle. The
main issue of this implementation regards no load bal-
ancing functionality. In Figure 3, the flow diagram of
this mechanism is depicted.
3.2 Server with Cell Breathing
Technique
In this section an improvement on the servers func-
tionality is presented in order to enhance the handover
implementation in the system modifying the behav-
ior of the BTSs in the intersected coverage area. The
proposed improvement is based on the cell breath-
ing concept (Thng et al., 2005), mechanism in use in
UMTS networks. The idea is to perform a sort of load
balancing into the BTS stations decreasing the num-
ber of vehicles to manage in a BTS with the conse-
quent increasing into the cell managed by the other
BTS. In the following, some details about the mech-
anism implementation in the considered system will
be explained. In order to consider the new mecha-
nism, three new data structures have been introduced.
The first, called ZonaComune vehicles, keeps track
of the number of vehicles present in zone 2, i.e. in
the area where potentially both servers could manage
them. The second one, blackList, indicates those ve-
hicles which, although still in the coverage area, they
no longer need to be managed, as they have been as-
signed to the next server. The third one, VehiclesTo-
Controllare, indicates the vehicles that have been as-
signed to the new server. When a server receives a
message from a vehicle, it verifies that its ID is not
one to be ignored. If so, the message is discarded
without further analysis, since the vehicle is under the
management of another server. Otherwise, it analyzes
the position of the vehicle and it controls if the ve-
hicle can potentially be transferred to another server
by comparing its position with the position of the ad-
jacent server and its range of coverage. This is, the
server becomes aware of the area where the vehicle
is located. If the vehicle is in zone 2, it is added to
the data structure called VehiclesZoneComune. After
having updated the list, the server checks if it has ex-
ceeded the maximum number of connections that it
can accept regarding the mobile devices belonging to
zone 2. If the limit has been exceeded, it virtually de-
creases its range of action. This means that it gives
control of the first vehicle of the queue, effectively
relieving its computational load. To ensure that the
vehicle is supervised by the new server, it is neces-
sary to inform this server on the new condition. The
information is sent using the Type 4 message. When a
server receives a Type 4 message, it takes the vehicle
ID contained in that message and it enters this ID in
the appropriate data structure. In this way, the control
of the vehicle goes from one server to the other. So,
the handover was carried out using the Cell Breathing
paradigm. In Figure 4, the flow diagram of the server
that acts with cell breathing paradigm is shown.
SIMULTECH 2020 - 10th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
290
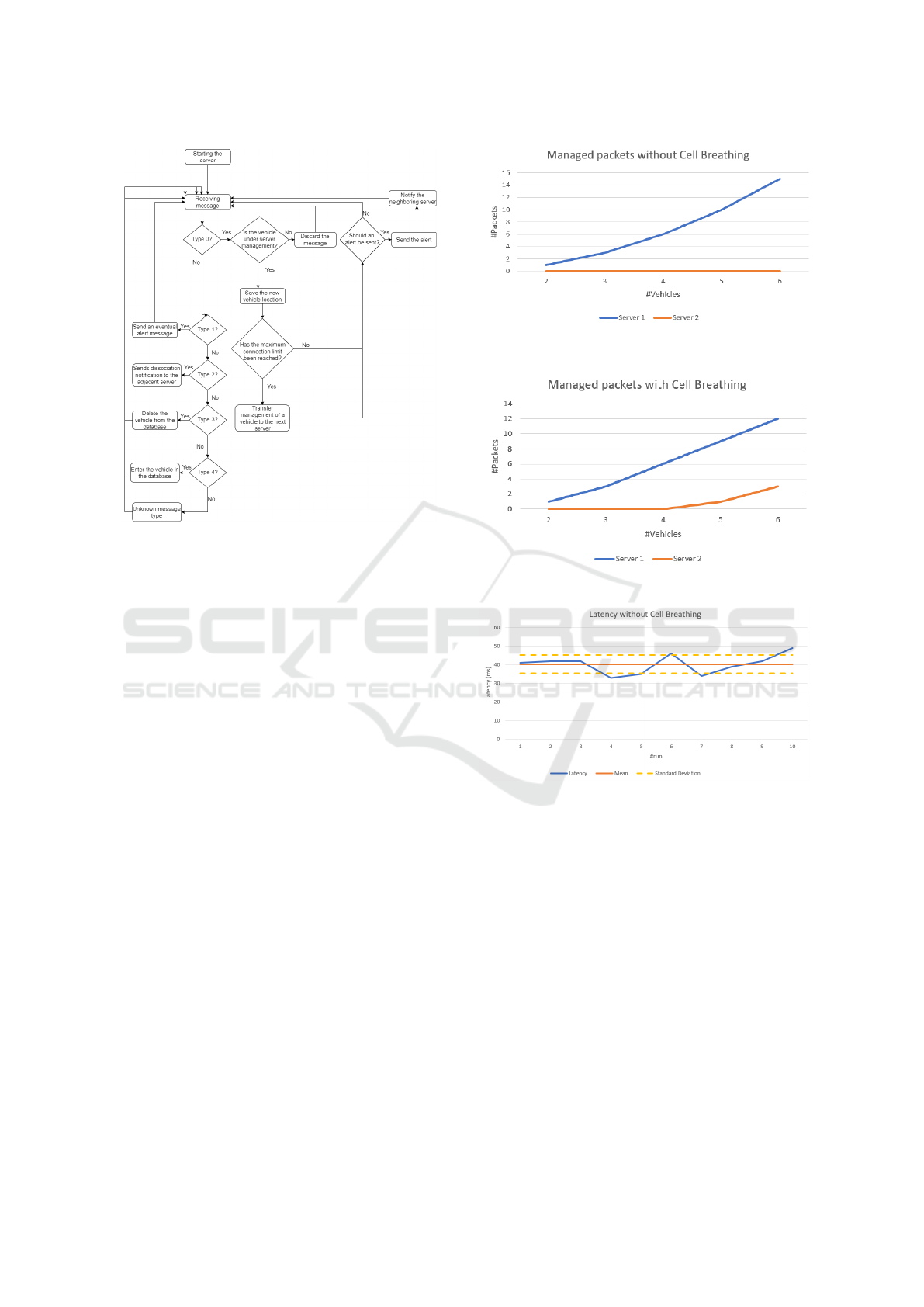
Figure 4: Flowchart of a server with Cell Breathing tech-
nique.
4 PERFORMANCE EVALUATION
In this section, the performance evaluation carried out
through implemented simulator are shown. Different
simulation are performed varying some input param-
eters. The number of vehicles considered in the sim-
ulative campaigns was varied from 1 to 6
A first result is referred to the number of pack-
ets managed by two servers that communicate with
the vehicles on the road. In Figure 5, the number of
packets managed without cell breathing paradigm is
shown, while in Figure 6, the number of packets in
the use case of cell breathing approach is depicted. In
the first case, the management of vehicles and, there-
fore of the packets to be sent is entirely covered by
the first server. In the second case, instead, despite
the vehicle positions are the same, a better load dis-
tribution can be appreciated. This is because some of
vehicles, although still in the range of the first server,
are forced to perform handover, so moving under the
management of the second server.
Another interesting analysis can be made on the
time that elapses between the detection of the dan-
ger event and the communication of this event to the
last vehicle of the set. The experiments were con-
ducted using both handover techniques. Considering
only the first mechanism, the vehicles are all under
the control of server 1. Ten different simulations are
performed in order to have an average value. The
Figure 5: Packages managed without cell breathing tech-
nique.
Figure 6: Packages managed with cell breathing technique.
Figure 7: Latency without cell breathing technique.
recorded roundtrip time is around 40 milliseconds,
see Figure 7, with a standard deviation of around 5
milliseconds. The time that elapses between the trans-
mission of the message by the vehicle and the pro-
cessing of the same by the server is about 20 millisec-
onds. Moreover, we have observed that the number of
involved vehicles does not contribute to this latency
because the experiments show that cars receive the
danger signal almost simultaneously, with a time dif-
ference of less than one millisecond. Considering in-
stead the second approach, half of the vehicles present
in the area are under the control of server 2; the other
half are under the control of server 1. In this case
the recorded roundtrip time is around 60 milliseconds,
with a standard deviation of around 5 milliseconds be-
cause another hop is added in the messages forward-
ing, see Figure 8.
Implementation and Simulation of Handover Techniques to Guarantee Service Continuity through Microservices at Edge
291

Figure 8: Latency with cell breathing technique.
Figure 9: Handover per time unit.
Finally, the last analysis concerns the number of han-
dovers. The ratio between the handover number and
the employed time has been calculated. In this way
the handover rate per seconds has been obtained. This
value is influenced by the vehicles speed and their dis-
tance from the vehicle ahead. Proceeding at higher
speeds, the BTS must manage a greater number of
handovers, because the speed with which the mobile
device changes position in the area is greater, see Fig-
ure 9. Considering same speeds, the number of han-
dovers per time unit increases, as the distance be-
tween two vehicles decreases.
5 CONCLUSIONS
In this paper, a solution to guarantee the continuity
of the service in an environment managed with Edge
Computing technology has been proposed. Docker
containers have been used to make applications light
and portable. Kubernetes was used to orchestrate the
Cluster containers and make the system robust. The
results obtained show that, based on the algorithm
used, there may be improvements in the management
of the mobile devices. The use of Cell Breathing fa-
vors the balancing of the computational load, which
becomes a crucial factor if compared to realistic en-
vironments, in which the number of vehicles to man-
age is quite high. Conversely, the latency recorded by
some vehicles increases, which leads to delays in the
delivery of messages.
REFERENCES
(2019). Docker: Empowering app development for devel-
opers. https://www.docker.com/.
(2019). Eclipse californium (cf) coap framework. https:
//www.eclipse.org/californium/.
(2019). Kubernetes: Production-grade container orchestra-
tion. https://kubernetes.io/.
(2019). Sumo - simulation of urban mobility. http://sumo.
sourceforge.net/.
(2019). Traci/traas - sumo documentation. https://sumo.dlr.
de/docs/TraCI/TraaS.html.
Artal-Villa, L., Hussein, A., and Olaverri-Monreal, C.
(2019). Extension of the 3dcoautosim to simulate ve-
hicle and pedestrian interaction based on sumo and
unity 3d. In 2019 IEEE Intelligent Vehicles Sympo-
sium (IV), pages 885–890. IEEE.
Bachiega, N. G., Souza, P. S., Bruschi, S. M., and de Souza,
S. d. R. (2018). Container-based performance eval-
uation: A survey and challenges. In 2018 IEEE In-
ternational Conference on Cloud Engineering (IC2E),
pages 398–403. IEEE.
De Rango, F., Fazio, P., and Marano, S. (2008). Utility-
based predictive services for adaptive wireless net-
works with mobile hosts. IEEE Transactions on Ve-
hicular Technology, 58(3):1415–1428.
De Rango, F., Veltri, F., Fazio, P., and Marano, S. (2009).
Two-level trajectory-based routing protocol for vehic-
ular ad hoc networks in freeway and manhattan envi-
ronments. Journal of Networks, 4(9):866–880.
Doan, T. V., Nguyen, G. T., Salah, H., Pandi, S., Jarschel,
M., Pries, R., and Fitzek, F. H. Containers vs virtual
machines: Choosing the right virtualization technol-
ogy for mobile edge cloud. In 2019 IEEE 2nd 5G
World Forum (5GWF), pages 46–52. IEEE.
Erel-
¨
Ozc¸evik, M. and Canberk, B. (2019). Road to 5g
reduced-latency: A software defined handover model
for embb services. IEEE Transactions on Vehicular
Technology, 68(8):8133–8144.
Fazio, P., De Rango, F., Tropea, M., and Voznak, M. (2017).
Cell permanence time and mobility analysis in infras-
tructure networks: Analytical/statistical approaches
and their applications. Computers & Electrical En-
gineering, 64:506–523.
Fazio, P., Sottile, C., Santamaria, A. F., and Tropea,
M. (2013). Vehicular networking enhancement and
multi-channel routing optimization, based on multi-
objective metric and minimum spanning tree. Ad-
vances in Electrical and Electronic Engineering,
11(5):349–356.
Fazio, P., Tropea, M., De Rango, F., and Voznak, M. (2016).
Pattern prediction and passive bandwidth manage-
ment for hand-over optimization in qos cellular net-
works with vehicular mobility. IEEE Transactions on
Mobile Computing, 15(11):2809–2824.
Fotino, M., Gozzi, A., Cano, J.-C., Calafate, C., De Rango,
F., Manzoni, P., and Marano, S. (2007). Evaluating
energy consumption of proactive and reactive routing
protocols in a manet. In IFIP Conference on Wireless
Sensor and Actor Networks, pages 119–130. Springer.
SIMULTECH 2020 - 10th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
292

Frnda, J., Voznak, M., Rozhon, J., and Mehic, M.
(2013). Prediction model of qos for triple play ser-
vices. In 2013 21st Telecommunications Forum Telfor
(TELFOR), pages 733–736. IEEE.
Gesbert, D., Hanly, S., Huang, H., Shitz, S. S., Simeone, O.,
and Yu, W. (2010). Multi-cell mimo cooperative net-
works: A new look at interference. IEEE journal on
selected areas in communications, 28(9):1380–1408.
Ghori, M. R., Zamli, K. Z., Quosthoni, N., Hisyam, M.,
and Montaser, M. (2018). Vehicular ad-hoc net-
work (vanet): Review. In 2018 IEEE International
Conference on Innovative Research and Development
(ICIRD), pages 1–6.
Khan, W. Z., Ahmed, E., Hakak, S., Yaqoob, I., and Ahmed,
A. (2019). Edge computing: A survey. Future Gener-
ation Computer Systems, 97:219–235.
Klas, G. (2017). Edge computing and the role of cellular
networks. Computer, 50(10):40–49.
Lim, K. G., Lee, C. H., Chin, R. K. Y., Yeo, K. B., and Teo,
K. T. K. (2017). Sumo enhancement for vehicular ad
hoc network (vanet) simulation. In 2017 IEEE 2nd
International Conference on Automatic Control and
Intelligent Systems (I2CACIS), pages 86–91. IEEE.
Pan, J. and McElhannon, J. (2017). Future edge cloud and
edge computing for internet of things applications.
IEEE Internet of Things Journal, 5(1):439–449.
Salihin, S. S., Nissirat, L. A., Noor, R. M., and Ahmedy, I.
(2018). Handover schemes for vehicular ad-hoc net-
works over long term evolution advanced: A survey.
In 2018 International Conference on Computational
Approach in Smart Systems Design and Applications
(ICASSDA), pages 1–7. IEEE.
Santamaria, A. F., Raimondo, P., Tropea, M., De Rango,
F., and Aiello, C. (2019). An iot surveillance sys-
tem based on a decentralised architecture. Sensors,
19(6):1469.
Santamaria, A. F., Tropea, M., Fazio, P., and De Rango,
F. (2018). Managing emergency situations in vanet
through heterogeneous technologies cooperation. Sen-
sors, 18(5):1461.
Shah, S. H. and Yaqoob, I. (2016). A survey: Internet
of things (iot) technologies, applications and chal-
lenges. In 2016 IEEE Smart Energy Grid Engineering
(SEGE), pages 381–385. IEEE.
Socievole, A., De Rango, F., and Coscarella, C. (2011).
Routing approaches and performance evaluation in
delay tolerant networks. In 2011 Wireless Telecom-
munications Symposium (WTS), pages 1–6. IEEE.
Thng, K. L., Yeo, B. S., and Chew, Y. H. (2005). Perfor-
mance study on the effects of cell-breathing in wcdma.
In 2005 2nd International Symposium on Wireless
Communication Systems, pages 44–49. IEEE.
Tinkhede, P. and Ingole, P. (2014). Survey of handover de-
cision for next generation. In International Confer-
ence on Information Communication and Embedded
Systems (ICICES2014), pages 1–5. IEEE.
Zhou, B., Lee, Y.-Z., Gerla, M., and De Rango, F. (2006).
Geo-lanmar: a scalable routing protocol for ad hoc
networks with group motion. Wireless Communica-
tions and Mobile Computing, 6(7):989–1002.
Implementation and Simulation of Handover Techniques to Guarantee Service Continuity through Microservices at Edge
293
