
Adaptive Fault-Tolerant Control Allocation Schemes for Overactuated
Systems with Actuator and Bias Faults
Waseem Akram, Francesco Tedesco and Alessandro Casavola
Department of Computer Engineering, Modelling, Electronics and Systems (DIMES), University of Calabria, Rende, Italy
Keywords:
Control Allocation, Fault-Tolerant, Actuator Redundancy, Bias Fault, Marine Surface Vehicle.
Abstract:
Fault-Tolerant control is of paramount importance in marine technology, especially for autonomously guided
vehicles. It can be achieved by exploiting actuators redundancy, which adds flexibility to the system by
guaranteeing maneuverability, even in the presence of actuator faults. The main idea in the control allocation
scheme here proposed is at distributing the control effort among the remaining healthy actuators without
changing the nominal control law. In this paper, we propose an enhanced adaptive control allocation algorithm
for over actuated systems. The proposed algorithm works under actuators loss of effectiveness with possible
thruster stuck situations under both input saturation and rate of change constraints. The effectiveness of the
proposed scheme is shown by simulating a marine surface vehicle model on a path-following problem.
1 INTRODUCTION
The success of autonomous marine vehicle missions
under actuator faults strongly depends on the effec-
tiveness of control reconfiguration strategies. Such
strategies are concerned with diving, hovering and
safe movements of the vehicles under different cir-
cumstances, possibly in the case of faults or fail-
ures. Usually, actuator faults occur due to seaweeds
or ropes that get stuck in the thruster or failures in
the actuator power unit (He et al., 2012). Thus, fault
tolerance is a key issue in the development of con-
trol strategies for autonomous marine vehicles (Khan
et al., 2018).
The actuator redundancy concept is widely used
in many control schemes to achieve system faults tol-
erability. In the design and implementation of re-
silient control strategies, control allocation algorithms
are used to manage and distribute the control sig-
nals among redundant actuators, by using the degree
of freedom provided by redundancy to accomodate
faulty thrusters and increasing the system maneuver-
ability, flexibility and safety.
In the past few decades, many scientific stud-
ies have been accomplished on fault-tolerant control
schemes. Some of the key examples are briefly re-
viewed next. Authors of (Wang et al., 2015) worked
on fault control and reconfiguration schemes in the
presence of uncertainty, environmental disturbances,
and thruster faults. Their study proposes the use of
a sliding mode algorithm and a back-stepping tech-
nique. Authors of (Tohidi et al., 2017) proposed an
adaptive control allocation scheme for over-actuated
systems. In this work, actuator loss is dealt without
estimating the control input matrix. Another adap-
tive fault-tolerant control allocation approach is pro-
posed in (Casavola and Garone, 2010), where the au-
thors consider over-actuated systems under actuator
faults. In this work, the online parameter estima-
tion algorithm is integrated with the control alloca-
tion algorithm. Authors of (Liu et al., 2018) stud-
ied the adaptive fault-tolerant control scheme for au-
tonomous underwater vehicles under environmental
disturbance and uncertainty. In this work, a closed-
loop system is considered by using an adaptive fault-
tolerant control scheme. The system deals with track-
ing problems. Authors of (Ismail et al., 2014) studied
the fault-tolerant control of a kinematical redundancy
thruster structure for autonomous underwater vehi-
cles. In this work, the method is divided into thruster
force allocation and control design for tracking prob-
lems. The redundant thruster concept is adopted for
accomodate faulty thrusters in path-following control
problems.
The authors of (Tohidi et al., 2016) proposed an
adaptive correction approach for fault-tolerant control
of autonomous underwater vehicles. In this work, the
method does not require any estimation of the input
matrix. The adaptive control is responsible to find
control allocation parameters. Additionally, a sliding
Akram, W., Tedesco, F. and Casavola, A.
Adaptive Fault-Tolerant Control Allocation Schemes for Overactuated Systems with Actuator and Bias Faults.
DOI: 10.5220/0009894800810088
In Proceedings of the 17th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2020), pages 81-88
ISBN: 978-989-758-442-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
81

mode controller is also used that provides system sta-
bility. In the study (Chu et al., 2018), authors stud-
ied diving movement and proposed an adaptive fuzzy
sliding mode controller for autonomous underwater
vehicles. In this work, the concept of partial satura-
tion of the rudder angle is adopted. A partially known
input gain was used and a single fuzzy logic was de-
signed for online parameter estimation. Authors of
(Zhang et al., 2017) worked on path tracking of fault
tolerant control problems for the autonomous under-
water vehicle by using the backstepping technique.
The technique is capable to drive the vehicle under
ocean current, unknown faults and rate constraints.
Similarly, the utility of fault-tolerant control schemes
has also been reported in (Patel and Shah, 2018; Wang
and Zhang, 2017).
In this paper, we propose a new control allocation
method that is capable to tolerate system faults for
vehicles with actuator redundancy. The general ar-
chitecture of control allocation scheme is shown in
Figure 1 where it is assumed that the control law has
been designed on the basis of a virtual system with
a minimal number of inputs v(t). Then, a control al-
location unit is in charge of reallocating the desired
control effort related to v(t) among the physical actu-
ators u(t) on the basis of their current status. Here the
allocation unit is designed by resorting to ideas pre-
sented in (Casavola and Garone, 2010). Anyway, in
the current work we use additional actuator rate con-
straints and stuck (bias) faults. The online effective-
ness matrix and the bias fault estimation are integrated
with the control allocation algorithm. The proposed
algorithm is capable to successfully perform the con-
trol allocation task under actuator rate constraints and
stuck faults. Simplicity, accuracy, low computational
cost and system stability are the main characteristics
of the proposed control allocation method.
Figure 1: Modular structure of control and control alloca-
tion scheme.
2 PROBLEM STATEMENT
Let us consider the plant described by the following
discrete-time state-space equation.
x(t + 1) = A(x(t)) + B
u
(x(t))u(t) (1)
where x ∈ R
n
and u ∈ R
m
are the system states
and control input. A(x(t)) and B
u
(x(t)) are non-
linear state-dependent matrices. It is assumed that
the system has redundant actuators, thus control
matrix is rank deficient and can be written as
rank(B
u
((x(t)))) = r < m for all x ∈ R
n
. Moreover,
the control inputs are subject to amplitude and rate
constraints, that is:
u(t) ∈ Ω( ˜u) := {u ∈ R
m
|u
−
≤ u(t) ≤ u
+
,|u − ˜u| ≤
¯
∆u,}
(2)
where u
+
:= [u
+
1
,u
+
2
,...,u
+
m
]
T
, u
−
:= [u
−
1
,u
−
2
,...,u
−
m
]
T
,
and
¯
∆u := [
¯
∆u
1
,
¯
∆u
2
,...,
¯
∆u
m
]
T
.
According to the definition of the control matrix,
the system in (1) can be represented in an equivalent
form as following:
x(t + 1) = A(x(t)) + B
v
(x(t))v(t) (3)
B
v
(x(t))v(t) = B(x(t))u(t) (4)
where B
v
(x(t)) ∈ R
nxk
is a full column rank matrix,
v(t) ∈ R
k
is a virtual input to control the model. The
virtual control input is the desired total effort that one
wants to apply to the system. The system given in (3)
is called the virtual plant and (4) is called the parity
equation. This representation of the system shows the
relationship between virtual and physical inputs.
In the sequel it is assumed that the system is sub-
ject to actuator faults and can be rewritten as:
x(t + 1) = A(x(t)) + B
u
(x(t))∆(t)u(t) + B
u
(x(t)) f (t)
(5)
where f (t) represents possible bias faults and
∆(t) = diag{δ
1
(t),δ
2
(t),...,δ
m
(t)},0 ≤ δ
i
(t) ≤ 1
(6)
is called the Effectiveness matrix. If δ
i
(t) = 1,the ac-
tuator is working perfectly, if δ
i
(t) < 1,the actuator
is faulty, and if δ
i
(t) = 0, then the actuator is failed.
The overall control allocation problem can be stated
as follows.
Fault-Tolerant Control Allocation Problem (F-
TCAP). Given the plant (3) and the virtual input v(t),
compute at each time instant t ≥ 0 the physical input
u(t) such that:
• the input constraints are satisfied
u(t) ∈ Ω(u(t − 1)) (7)
• control allocation is successfully performed re-
gardless of possible faults occurrences, i.e.
B
v
(x(t))v(t) = B
u
(∆(t)u(t) + f (t)) (8)
Remark. The previous F-TCAP (Casavola and
Garone, 2010) was not able to tolerate the actuator
rate constraints and bias faults during the operation.
In this paper we generalize the scheme to accommo-
date such new requirements.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
82

3 PROPOSED SCHEME
In this section the above state problem is solved by
means of the following a three-step procedure per-
formed at each time instant t:
1. Estimate the contribution of the fault term
ˆ
f (t) by
exploiting the current state measurement x(t)
2. Compute the diagonal matrix
ˆ
∆(t) as the best esti-
mation of ∆(t) on the basis of previous state mea-
surements and applied commands
3. Solve a control allocation problem by means of
equation (8) by assuming (certainty equivalence
hypothesis) ∆(t) =
ˆ
∆(t) and f (t) =
ˆ
f (t)
The first step is easily accomplished as x(t), A(x(t −
1)), u(t − 1) and B
u
(x(t − 1))
ˆ
∆(t − 1)u(t − 1) are
known quantities. Then the computation of
ˆ
f (t) is
performed as follows:
B
u
(x(t − 1))
ˆ
f (t − 1) = x(t) − A(x(t − 1))
− B
u
(x(t − 1))
ˆ
∆(t − 1)u(t − 1)
(9)
The second step is performed by exploiting the idea
of (Casavola and Garone, 2010) where a moving time-
windowed least-squared parameter estimation scheme
was introduced. It is based on the following optimiza-
tion problem:
ˆs
i
(t) , argmin
N
∑
i=1
ks
i
k
2
Q
i
+ kvect(Γ)k
2
R (10)
subject to the following condition:
x(t − i + 1) − A(x(t − i)) − B
u
(x(t − i))[Γ +
ˆ
∆(t − 1)]
u(t − i) − B
u
(x(t − i))
ˆ
f (t − i) = s
i
,i = 1, .., N.
(11)
where Q
i
>> R are weighting matrices, s
i
is a par-
ity slack vector, and
ˆ
Γ(t) =
ˆ
∆(t) −
ˆ
∆(t − 1) is
ˆ
∆(t) in
incremental order.
The matrix
ˆ
Γ(t) is defined as:
ˆ
Γ(t) , diag{
ˆ
γ
1
,
ˆ
γ
2
,..,
ˆ
γ
m
} ∈ R
m×n
(12)
which is a diagonal matrix of actuator effectiveness
loss.
Finally the third step is carried out by completing
the control allocation task. In particular the following
optimization problem is solved:
u(t) , argmin
s,u
ksk
2
Q
s
+ kuk
2
R
u
,
B
v
(x(t))v(t) = B
u
(x(t))
ˆ
∆(t)u + B
u
(x(t))
ˆ
f (t),
u ∈ Ω(u(t − 1)),
(13)
The whole scheme can be summarized in the follow-
ing algorithm:
Algorithm 1: F-TCAP.
Initialization:
1: set: x(0), v(0), ∆(0), f (0)
2: choose: window horizon N for the parameter es-
timation
3: store: u(0), x(0), v(0), f (0), ∆(0)
Online-Phase
1: for t > 0 do
2: compute: B
u
(x(t − 1))
ˆ
f (t − 1) as in (9)
3: get: virtual input v(t) from the controller
4: compute:
ˆ
∆(t) by solving (10)
5: compute: u(t) as in (13)
6: apply u(t)
4 ILLUSTRATIVE EXAMPLES
4.1 Linear Unstable Model
In this section, we consider a linear unstable model
in order to show the applicability and effectiveness
of the proposed scheme. The model is taken from
(Casavola and Garone, 2010). Let consider a state-
space model as following:
x(t + 1) = Ax(t) + B
u
u(t) (14)
where x ∈ R is the state vector and u = u
1
,u
2
,u
3
∈ R
3
physical input vector subject to the following con-
straints:
−5 ≤ u
i
(t) ≤ 5
−0.9 ≤ u
i
(t) − u
i
(t − 1) ≤ 0.9
(15)
Moreover: A = 1.2 and Bu = [1, 1, 1] are considered.
The actuator and bias faults occurrences are assumed
as:
∆(t) = diag{1,1, 1} for t < 12
s
∆(t) = diag{0.9,1,1} for 12
s
≤ t ≤ 200
s
∆(t) = diag{0.5,1,0} for t > 200
s
(16)
f (t) = [0,0,0]
T
for t < 12
s
f (t) = [0.01,0,0]
T
for 12
s
≤ t ≤ 200
s
f (t) = [0,0,0.01]
T
for t > 200
s
(17)
The actuator faults consist of two fault sequence. The
first fault is occurring at 12
s
≤ t ≤ 200
s
when a partial
fault occurs at the first actuator. This is followed by
a reduction of 50% effectiveness at first actuator after
Adaptive Fault-Tolerant Control Allocation Schemes for Overactuated Systems with Actuator and Bias Faults
83
t > 200
s
. In particular, please note that after t > 200,
the third actuator gets stuck until the simulation.
The virtual input matrix B
v
= 1 is used and the vir-
tual signals are built as v(t) = Kx(t) + K
r
r(t), where
r(t) is a constant reference signal to be tracked, K
is such that (A + B
v
K) is a Schur matrix, and K
r
=
((I − A − B
v
K)
−1
B
v
)
−1
. In the feedback control law,
the gain K = −0.6 is used. The model is simulated
under the CAP and F-TCAP algorithms.
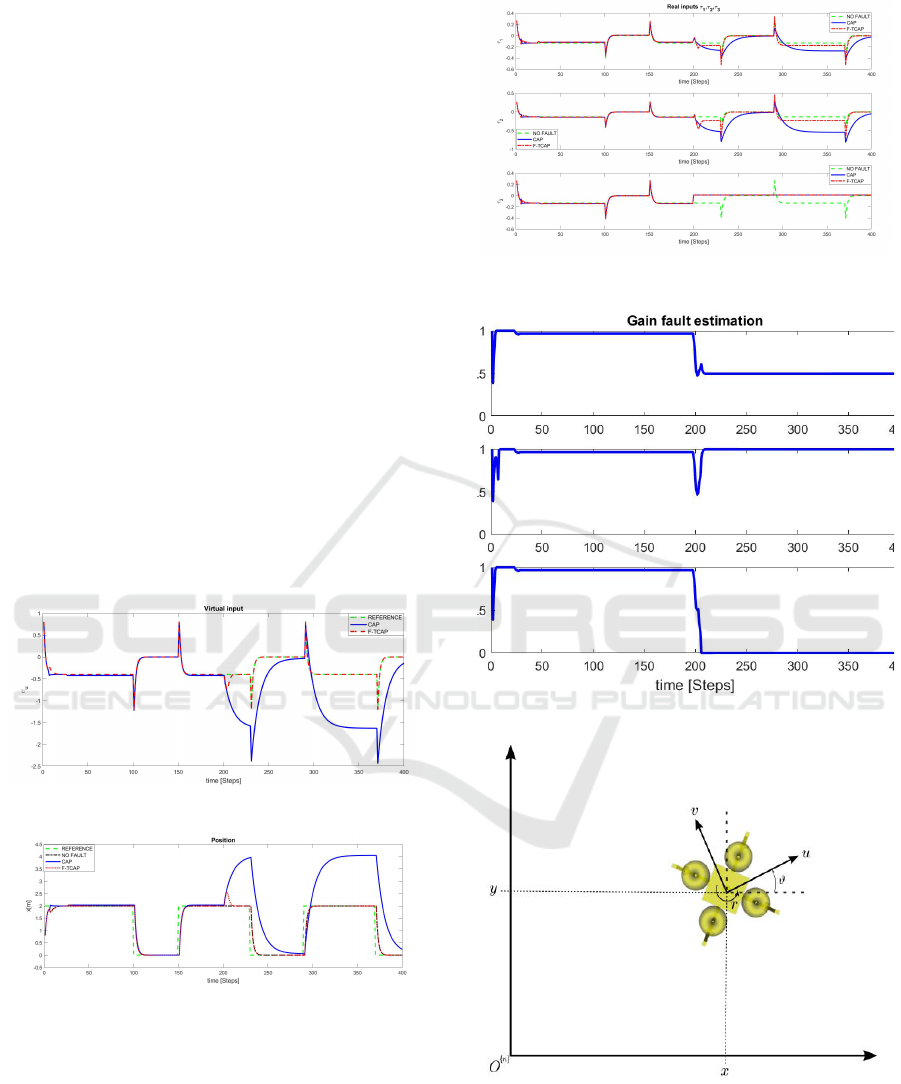
In Figure 2, the virtual signals are shown in three
different cases i.e No fault, CAP, and F-TCAP. This
shows that the control law is not disturbed by the
faulty actuator. In Figure 3, the position vector is
plotted. Here, it can be noticed that the F-TCAP algo-
rithm successfully tracks the reference position under
actuator and bias faulty events. It is observed that a
small perturbation is generated in the case of F-TCAP,
while the behavior of the CAP method is highly dis-
turbed by faulty events. Figure 4 reports the physical
inputs. This shows that the signals of faulty actua-
tor smartly changed- all signals are distributed among
healthy actuators after the actuator got stuck. In last,
Figure 5 shows the loss of effectiveness parameters.
Notice in this viewpoint, the F-TCAP algorithm tol-
erates the fault better than the CAP algorithm.
Figure 2: Virtual inputs.
Figure 3: Position.
4.2 Marine Surface Vehicle
In this section, we consider the surface marine vehicle
depicted in Figure 6. The model and the control struc-
ture are taken from (Folino, 2018; D’Angelo, 2018).
There, the system position is denoted by η = [x,y,θ]
T
,
where x and y are earth-fixed positions and θ is the
yaw angle. The body-fixed velocities are denoted
with ρ = [u,v,r]
T
where u is forward velocity, v is lat-
Figure 4: Physical inputs: τ
i
= u
i
+ f
i
.
Figure 5: Fault loss of effectiveness profiles.
Figure 6: Schematic model of the ship.
eral velocity, and r is yaw angular velocity. The thrust
and force moment of the vehicle are represented by
υ = [υ
u
,υ
v
,υ
r
]
T
and are generated via the thrust vec-
tor τ = [τ
1
,τ
2
,τ
3
,τ
4
]
T
as depicted in Figure 7. More
formally the kinematic model of the system is given
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
84
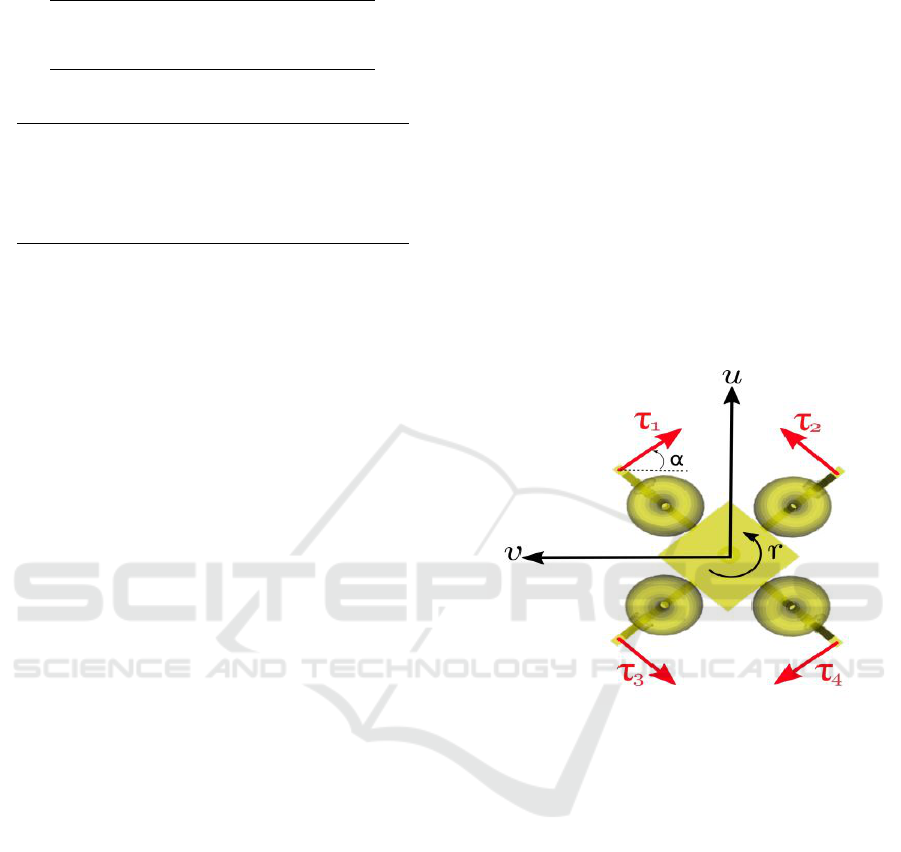
Table 1: The system matrices.
M Inertia matrix
C Coriolis/centripetal matrix
D Hydrodynamics damping matrix
Table 2: Parameters definitions.
m = 1.1274 [Kg] Mass
I
z
= 1[Kg m
2
] moment of Inertia
β
u
= 0.0414[Kg/m] friction force coefficient along u
β
v
= 0.0414[Kg/m] friction force coefficient along v
β
r
= 0.0568[Kg m
2
] friction torque coefficient along r
α = π/4 thruster angle in the body frame
as follows:
˙
η(t) = R(θ(t))ρ(t) (18)
where R(θ) is the rotational matrix around the yaw
angle defined as
R(θ) :=
cos(θ) −sin(θ) 0
sin(θ) cos(θ) 0
0 0 1
while the dynamic model is derived as:
M
˙
ρ(t) +C(ρ(t))ρ(t) + D(ρ(t))ρ(t) = υ(t) (19)
where the system matrices, whose meaning and nu-
merical parameters are reported in Tables 1-2, take
the following form:
M :=
m 0 0
0 m 0
0 0 I
z
C(ρ) :=
0 −mr 0
mr 0 0
0 0 0
D(ρ) :=
β
u
u 0 0
0 β
v
v 0
0 0 β
r
r
Such a model can be recast as:
˙
ρ(t) = A(ρ(t)) +
ˆ
B
v
υ(t) (20)
that is more similar to (3) although in continuous-time
domain. Here the matrix A(ρ(t)) := −M
−1
(C(ρ(t))+
D(ρ(t))ρ(t), while
ˆ
B
v
:= M
−1
. Thus,the discrete-time
state-space representation (3) takes the form:
η(t + 1)
ρ(t + 1)
=
I T
s
R(θ(t))
0 I + T
s
M
−1
(C(ρ(t)) + D(ρ(t))
η(t)
ρ(t)
+
0
B
v
υ(t)
where T
s
is the sampling period and B
v
= T
s
ˆ
B
v
.
In particular input υ is produced by the 4 thrusters
according to the following allocation law
υ(t) = B
u
τ(t) (21)
where the allocation matrix B
u
is defined as:
B
u
:=
sin(α) sin(α) − sin(α) −sin(α)
cos(α) −cos(α) cos(α) −cos(α)
−l/2 l/2 l/2 −l/2
(22)
In (21) τ
1
and τ
2
denote the signals for two identical
main propellers and τ
3
and τ
4
are the control signals
for the transverse thrusters. In this respect τ repre-
sents the signal generated by the actuators on the basis
of the physical input u(t) = [u
1
,u
2
,u
3
,u
4
]
T
produced
by the allocation unit according to the following ex-
pressions that accounts also for possible faulty events
τ(t) = ∆(t)u(t) + f (t) (23)
where ∆ ∈ R
4×4
represents the control effectiveness
matrix and f (t) models bias faults.
Figure 7: Thrust forces allocation.
In view of the previous discussion, the signal υ can
be considered as the virtual control signal. It is deter-
mined by the following time-invariant control law
υ(t) = K
ρ
[R
T
(θ(t))K
η
(η
d
(t) − η(t)) − ρ(t)] (24)
where the controller gains are K
ρ
= 0.75I
3×3
, K
η
=
0.63I
3×3
and η
d
(t) is the desired trajectory to track.
The sampling period for both the control law and the
control allocator is T
s
= 0.2827.
The goal of the first simulation campaign is to suc-
cessfully allocate virtual law (24) with desired refer-
ence η
d
evolving as
η
d
=
[0,0,0]
T
for t < 12
s
[2,0,0]
T
for 12
s
≤ t ≤ 200
s
[2,2,π]
T
for 200
s
< t ≤ 500
s
[0,0,0]
T
for t > 500
s
(25)
under the constraints
−0.1 ≤ u
i
≤ 0.1and − 0.09 ≤ u
i
− u
i
(t − 1) ≤ 0.09
(26)
Adaptive Fault-Tolerant Control Allocation Schemes for Overactuated Systems with Actuator and Bias Faults
85
and despite the matrix effectiveness and bias actuator
faults assumed as:
∆(t) = diag{1,1, 1, 1}for t < 12
s
∆(t) = diag{0.9,1,1,1}for 12
s
≤ t ≤ 200
s
∆(t) = diag{0.8,1,0,1}for t > 200
s
(27)
f (t) = [0,0,0,0]
T
for t < 12
s
f (t) = [0.01,0,0,0]
T
for 12
s
≤ t ≤ 200
s
f (t) = [0,0,0.01,0]
T
for t > 200
s
(28)
In particular note that after t > 200
s
, the third actuator
gets stuck until the simulation.
In order to show the effectiveness of the proposed
scheme, we have simulated the model under the fol-
lowing scenarios:
• No Fault: the model is simulated without consid-
ering any fault.
• CAP: the algorithm is implemented without cal-
culation of effectiveness matrix and bias fault es-
timation.
• F-TCAP: the algorithm is simulated with the cal-
culation of effectiveness matrix and bias faults es-
timation.
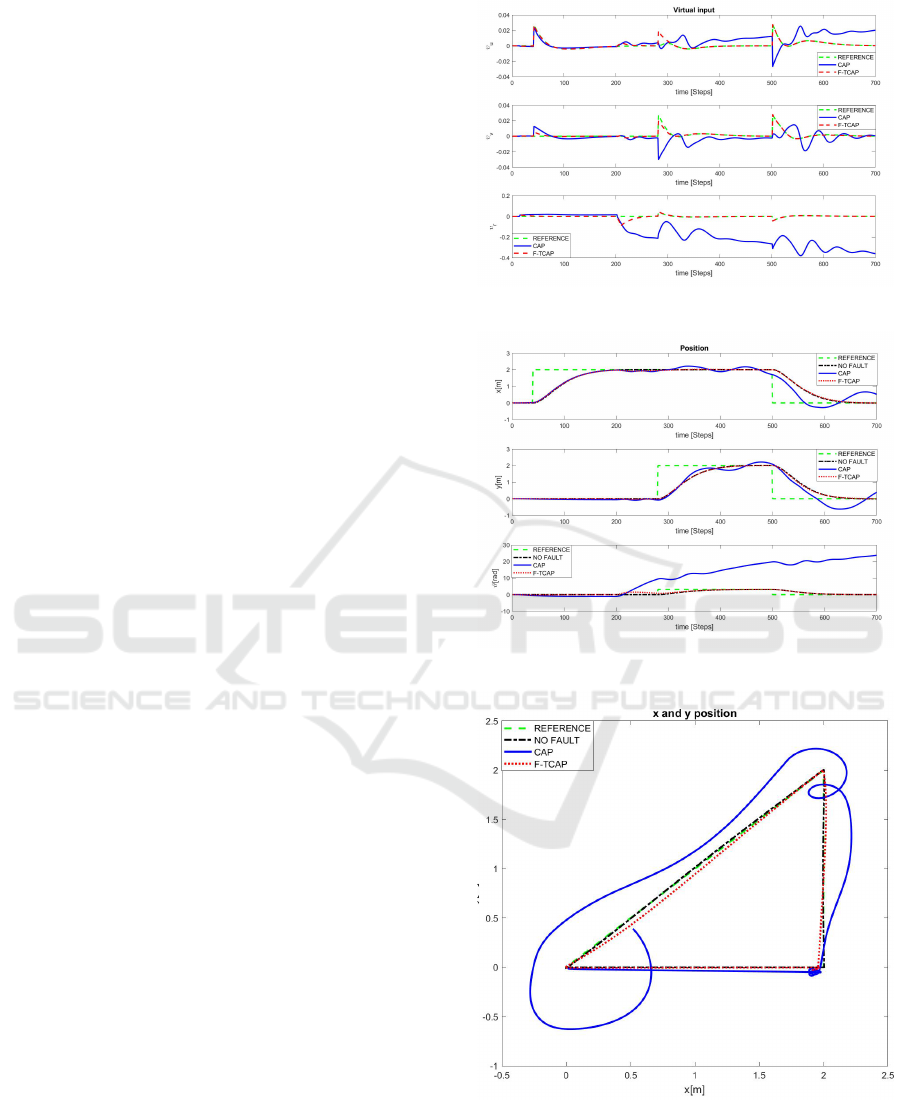
The results of this first simulation are reported in Fig-
ures 8-12. In particular Figure 8 shows the total vir-
tual control input needed to drive the vehicle. It is
observed that the virtual control inputs are success-
fully tracked and the system remains bounded with
smooth variations by using the F-TCAP algorithm.
Figures 9 and 10 show the positions of the vehicle
by using CAP and F-TCAP algorithm. The simula-
tion results demonstrate that the variables continue to
track their desired values after a fault occurs by using
the F-TCAP algorithm while the CAP is not working
correctly. It is observed that the system remains stable
under faulty conditions with F-TCAP. The physical
inputs are plotted in Figure 11. The proposed algo-
rithm successfully allocates the control efforts to the
vehicle under faulty scenarios and distributes the con-
trol to the healthy actuators. Figure 12 gain fault es-
timation. Here, the loss of effectiveness parameters is
estimated and plotted. The system shows a small per-
turbation when the fault occurs. It is observed that the
proposed algorithm performed better in case of recon-
figuration and control allocation as compared to the
CAP algorithm under actuator faults, rate constraints
and bias faults.
A second simulation example has been performed
to observe the behaviour of the CAP and F-TCAP al-
gorithms when the vehicle fixed is instructed to keep
position at a fixed point when an actuator is stuck. In
Figure 8: Example 1: Virtual inputs.
Figure 9: Example 1: Vehicle positions and angle.
Figure 10: Example 1: x and y position of the vehicle.
this example, we assumed a reference path position
as η
d
(t) = [0,0,0]
T
,∀t ≥ 0. During the simulation,
the actuator fault ∆(t) = [1,0,1,1]
T
and bias fault as
f (t) = [0,0.8,0,0]
T
is imposed on the model in the
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
86
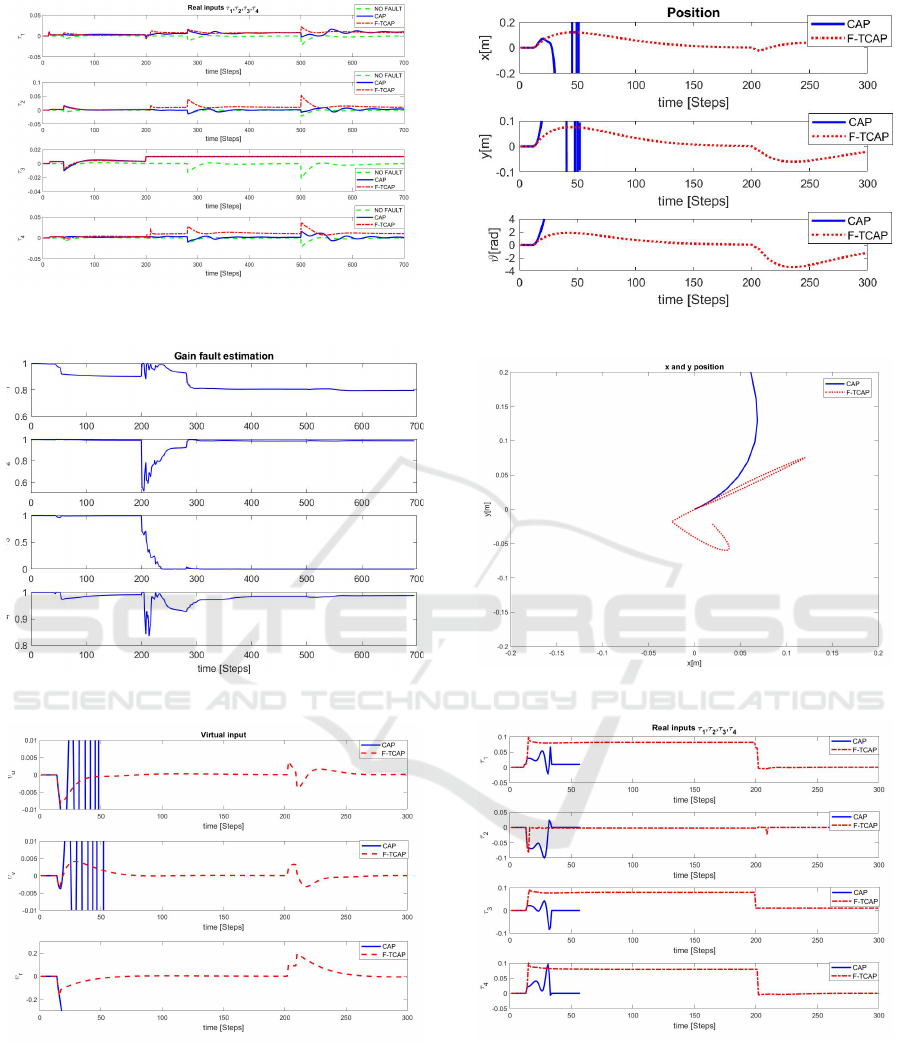
Figure 11: Example 1: Physical inputs.
Figure 12: Example 1: Fault loss of effectiveness profiles.
Figure 13: Example 2: Virtual inputs.
time range 12
s
≤ t ≤ 200
s
. Figure 13 shows the vir-
tual control input that is used to generate the physical
inputs as shown in Figure 16. The position of the ve-
hicle is shown in Figure 14 and 15. It can be noted
that under CAP the vehicle position goes to infinity.
On the contrary, under F-TCAP the vehicle remains
close to the reference position thanks to the action of
Figure 14: Example 2: Vehicle positions and angle.
Figure 15: Example 2: x and y position of the vehicle.
Figure 16: Example 2: Physical inputs.
the allocation unit. This depicts that the vehicle is
stable and input signals are bounded by using the F-
TCAP algorithm under actuator and bias faults.
Adaptive Fault-Tolerant Control Allocation Schemes for Overactuated Systems with Actuator and Bias Faults
87

5 CONCLUSIONS
In this paper, a new adaptive fault-tolerant control
allocation algorithm is proposed. The proposed al-
gorithm integrates online effectiveness matrix and
bias faults estimation with the control allocation al-
gorithm. The actuator and bias faults are considered
under actuator amplitude and rate constraints. The ef-
fectiveness of the proposal is shown by using a marine
surface vehicle model where the proposed algorithm
showed good performance in terms of control allo-
cation. Future works foresees the implementation of
this class of adaptive control allocation strategies on
real redundant marine vehicles.
ACKNOWLEDGEMENTS
The authors want to thank Ing. Paolo Folino and Ing.
Vincenzo D’Angelo by AppliCon S.r.l for providing
us with the mathematical model of the autonomous
marine vehicle they developed in their master’s the-
ses and for useful discussions and assistance in their
vehicle control and guidance aspects.
REFERENCES
Casavola, A. and Garone, E. (2010). Fault-tolerant adaptive
control allocation schemes for overactuated systems.
International Journal of Robust and Nonlinear Con-
trol, 20(17):1958–1980.
Chu, Z., Xiang, X., Zhu, D., Luo, C., and Xie, D. (2018).
Adaptive fuzzy sliding mode diving control for au-
tonomous underwater vehicle with input constraint.
International Journal of Fuzzy Systems, 20(5):1460–
1469.
D’Angelo, V. (2018). Strategie di gestione delle missioni
e controllo di un veicolo marino autonomo di superfi-
cie. Master’s thesis, University of Calabria. Master’s
thesis in Automation Engineering.
Folino, P. (2018). Strategie di guida e navigazione per un
veicolo marino autonomo di superficie. Master’s the-
sis, University of Calabria. Master’s thesis in Automa-
tion Engineering.
He, C., Feng, Z., and Ren, Z. (2012). Flocking of multi-
agents based on consensus protocol and pinning con-
trol. In Proceedings of the 10th World Congress on In-
telligent Control and Automation, pages 1311–1316.
IEEE.
Ismail, Z. H., Faudzi, A., and Dunnigan, M. W. (2014).
Fault-tolerant region-based control of an underwater
vehicle with kinematically redundant thrusters. Math-
ematical Problems in Engineering, 2014.
Khan, H. Z. I., Rajput, J., Ahmed, S., Sarmad, M., and
Sharjil, M. (2018). Robust control of overactuated au-
tonomous underwater vehicle. In 2018 15th Interna-
tional Bhurban Conference on Applied Sciences and
Technology (IBCAST), pages 269–275. IEEE.
Liu, X., Zhang, M., and Yao, F. (2018). Adaptive fault
tolerant control and thruster fault reconstruction for
autonomous underwater vehicle. Ocean Engineering,
155:10–23.
Patel, H. R. and Shah, V. A. (2018). A framework for fault-
tolerant control for an interacting and non-interacting
level control system using ai. In ICINCO (1), pages
190–200.
Tohidi, S. S., Yildiz, Y., and Kolmanovsky, I. (2016). Fault
tolerant control for over-actuated systems: An adap-
tive correction approach. In 2016 American Control
Conference (ACC), pages 2530–2535. IEEE.
Tohidi, S. S., Yildiz, Y., and Kolmanovsky, I. (2017). Adap-
tive control allocation for over-actuated systems with
actuator saturation. IFAc-PapersOnLine, 50(1):5492–
5497.
Wang, B. and Zhang, Y. (2017). An adaptive fault-
tolerant sliding mode control allocation scheme for
multirotor helicopter subject to simultaneous actuator
faults. IEEE Transactions on Industrial Electronics,
65(5):4227–4236.
Wang, Y., Wilson, P. A., Liu, X., et al. (2015). Adaptive
neural network-based backstepping fault tolerant con-
trol for underwater vehicles with thruster fault. Ocean
Engineering, 110:15–24.
Zhang, M., Liu, X., and Wang, F. (2017). Backstepping
based adaptive region tracking fault tolerant control
for autonomous underwater vehicles. The Journal of
Navigation, 70(1):184–204.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
88
