
Formal Accuracy Analysis of a Biometric Data Transformation and Its
Application to Secure Template Generation
Shoukat Ali
1
, Koray Karabina
2,3
and Emrah Karagoz
2
1
University of Calgary, Canada
2
Florida Atlantic University, U.S.A.
3
National Research Council, Canada
Keywords:
Secure Biometric Templates, Face Recognition, Keystroke Dynamics.
Abstract:
Many of the known secure template constructions transform real-valued feature vectors to integer-valued vec-
tors, and then apply cryptographic transformations. Throughout this two-step transformation, the original
biometric data is distorted, whence it is natural to expect some loss in the accuracy. As a result, the ac-
curacy and security of the whole system should be analyzed carefully. In this paper, we provide a formal
accuracy analysis of a generic and intuitive method to transform real-valued feature vectors to integer-valued
vectors. We carefully parametrize the transformation, and prove some accuracy-preserving properties of the
transformation. Second, we modify a recently proposed noise-tolerant template protection algorithm and com-
bine it with our transformation. As a result, we obtain a secure biometric authentication method that works
with real-valued feature vectors. A key feature of our scheme is that a second factor (e.g., user password, or
public/private key) is not required, and therefore, it offers certain advantages over cancelable biometrics or
homomorphic encryption methods. Finally, we verify our theoretical findings through implementations over
public face and keystroke dynamics datasets and provide some comparisons.
1 INTRODUCTION
Convenience and fraud prevention requirements in
systems create a growing demand for biometric au-
thentication. A biometric authentication system con-
sists of two phases: enrollment and verification. In
the enrollment phase, a user’s biometric sample is
collected via a sensor, and distinctive characteristics
are derived using a feature extraction algorithm. A
digital representation of these characteristics (the fea-
ture vector or the template) is stored in the system
database. In the verification phase, a matching algo-
rithm takes a pair of templates as input, and outputs a
score. A decision (accept or reject) is made based on
the matching score. Therefore, biometric templates
should be stored in some protected form to guard
against adversarial attacks. Since 1994 (Bodo, 1994;
Schmidt et al., 1996), there have been tremendous
research and development efforts for creating secure
biometric schemes. In the most general terms, we can
classify biometric template protection methods under
four main categories: biometric cryptosystems (BC)
cancelable biometrics (CB), secure multiparty com-
putation based biometrics (SC), also known as keyed
biometrics (KB), and hybrid biometrics (HB) We re-
fer the reader to (Natgunanathan et al., 2016) for more
details on biometric template protection methods.
In BC and SC (whence in HB), cryptographic
functions and transformations are the main tools to
create secure templates. By construction, the under-
lying cryptographic primitives are defined over some
particular discrete domains, and therefore, feature
vectors are supposed to be some binary, or integer-
valued vectors. For example, the BC- and SC-based
secure fingerprint and iris identification algorithms in
(Blanton and Gasti, 2011; Karabina and Canpolat,
2016; Tuyls et al., 2005) assume that feature vec-
tors are represented as fixed length binary vectors,
and the Hamming distance (and some variants of the
Hamming distance) is used as a way of measuring
the similarity between feature vectors. More gener-
ally, a large class of template protection algorithms
assume that feature vectors are integer-valued, and
the similarity scores are calculated based on Ham-
ming distance, set difference distance, or edit dis-
tance; see (Natgunanathan et al., 2016). On the
other hand, biometric data, in general, is represented
through real-valued feature vectors as in the case of
Ali, S., Karabina, K. and Karagoz, E.
Formal Accuracy Analysis of a Biometric Data Transformation and Its Application to Secure Template Generation.
DOI: 10.5220/0009888604850496
In Proceedings of the 17th International Joint Conference on e-Business and Telecommunications (ICETE 2020) - SECRYPT, pages 485-496
ISBN: 978-989-758-446-6
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
485

face recognition (Huang et al., 2007; Kanade et al.,
2009; Rathgeb et al., 2014) and keystroke dynamics
(Banerjee and Woodard, 2012; Bours and Barghouthi,
2009; Fairhurst and Da Costa-Abreu, 2011; Killourhy
and Maxion, 2009). Therefore, many of the known
secure template constructions, including the exam-
ples given above, would not be immediately applica-
ble when feature vectors are composed of non-integer,
real numbers.
Contributions and Organization of the Paper.
1. Provable Accuracy. In Section 2, we recall a
generic method to transform real-valued feature
vectors to integer-valued vectors. This method is
derived from a simple and intuitive transforma-
tion. However, the actual challenge is to carefully
parametrize the transformation and rigorously
prove that the method is accuracy-preserving. In
summary, given a (non-cryptographic) biometric
authentication system that takes real-valued vec-
tors as input, our construction yields a new sys-
tem that now takes integer-valued vectors as input.
Our key result Corollary 1 proves that the rates of
the new system can be made arbitrarily close to
the rates of the original system.
2. Accuracy Evaluation. For practical purposes, we
evaluate our theoretical findings over two publicly
available biometric datasets: the LFW face dataset
(Huang et al., 2007) and the keystroke-dynamics
dataset (Killourhy and Maxion, 2009). Our re-
sults are competetive with previously reported ac-
curacy results derived from the same datasets us-
ing some state-of-the-art biometric recognition al-
gorithms. For more details, please refer to Sec-
tion 3.
3. Cryptographic Implementation. As stated pre-
viously, a major advantage of transforming real-
valued feature vectors to integer-valued vectors
is the ability to cryptographically secure biomet-
ric templates. In order to evaluate the practi-
cal impact of our results, we modify a recently
proposed noise tolerant secure template genera-
tion and comparison algorithm NTT-Sec (Kara-
bina and Canpolat, 2016) and combine it with our
transformation. As a result, we obtain a secure
biometric authentication method that works with
real-valued feature vectors. A key feature of our
scheme is that a second factor (e.g., user pass-
word, or public and private key) is not required,
and therefore, it offers certain advantages over
cancelable biometrics or homomorphic encryp-
tion methods. We verify our theoretical findings
through implementations over the LFW dataset
(Huang et al., 2007) and the keystrokes-dynamics
dataset (Killourhy and Maxion, 2009). For more
details, please refer to Section 4 and Table 4 for
comparison.
As a result, we expect that our new construction
and its explicit accuracy analysis will enable cryp-
tographic techniques to secure biometrics at a larger
scale.
2 AN ACCURACY-PRESERVING
TRANSFORMATION
Let s be a positive real number called scaling factor.
We define the following scale-then-round transforma-
tion StR
s
that maps a real-valued vector of length n to
an integer-valued vector of the same length.
Definition 1 (The Scale-then-Round transformation
StR
s
). For a real-valued vector x = (x
1
,x
2
,...,x
n
),
the map StR
s
: R
n
→ Z
n
is defined as
StR
s
(x) = (
b
sx
1
e
,
b
sx
2
e
,...,
b
sx
n
e
)
where
b
·
e
is the nearest integer function.
Now, let d : R
n
× R
n
→ R be a distance function that
satisfies the homogeneity and translation properties:
for any x,y ∈ R
n
and u ∈ R, d(ux,uy) = |u|d(x,y)
and d(x,y) = d(x + u, y + u). We have the following
lemma:
Lemma 1. Let the transformation StR
s
: R
n
→ Z
n
and the distance function d be defined as above. Let
x,y ∈ R
n
be any real-valued vectors and denote their
transformations as the integer valued vectors X =
StR
s
(x) and Y = StR
s
(y) in Z
n
. Then
|
d(X,Y) − sd(x,y)
|
≤ 2ε
max
,
where ε
max
= max
u∈R
n
d(su,StR
s
(u)). Equivalently,
sd(x,y) − 2ε
max
≤ d(X,Y ) ≤ sd(x,y) + 2ε
max
and
d(X,Y) − 2ε
max
s
≤ d(x,y) ≤
d(X,Y) + 2ε
max
s
.
Proof. Using the triangular inequality on both
d(sx,sy) and d(X,Y) we have
d(X,Y) ≤ d(X, sx) + d(Y, sy) + d(sx,sy) and
d(sx,sy) ≤ d(X,sx) + d(Y,sy) + d(X,Y ).
Since d(sx,sy) = sd(x, y) and both d(X,sx) and
d(Y, sy) are bounded above by ε
max
, we have the de-
sired results.
Remark 1. Lemma 1 shows that given a pair of vec-
tors x,y ∈ R
n
, d(X ,Y )/s lies in the neighborhood of
the distance d(x,y) up to an error margin of 2ε
max
/s.
SECRYPT 2020 - 17th International Conference on Security and Cryptography
486

In the next theorem, we observe that if the Minkowski
distance d
p
(x,y) = (
∑
n
i=1
|x
i
− y
i
|
p
)
1/p
is deployed,
then d
p
(X,Y )/s converges to d
p
(x,y). This result will
later be used in Theorem 2 where we compare the er-
ror rates of our new system (with integer valued vec-
tors) and the original system (with real valued vec-
tors).
Theorem 1. Let d
p
be the Minkowski distanced de-
fined on R
n
× R
n
, and let X = StR
s
(x), Y = StR
s
(y),
as defined before. For a given ε > 0, if a scalar s is
chosen such that s ≥ n
1/p
/ε, then
|
d(X,Y)/s − d(x,y)
|
≤ ε ∀x,y ∈ R
n
Proof. Note that
ε
max
= max
u∈R
n
d
p
(su,StR
s
(u)) (1)
≤
n
∑
i=1
(1/2)
p
!
1/p
=
n
1/p
2
,
where the last inequality follows because |su
i
−
b
su
i
e
| ≤ 1/2 for all i. Now, for a given ε >
0, choose s such that s ≥ n
1/p
/ε. This implies
n
1/p
/s ≤ ε, and it follows from Lemma 1 and (1) that
|
d(X,Y)/s − d(x,y)
|
≤ 2ε
max
/s ≤ n
1/p
/s ≤ ε, as re-
quired.
Next, we provide some theoretical estimates on the
new system’s False Accept Rate (FAR) and False Re-
ject Rate (FRR) as a function of the original system’s
error rates. Let GenP and ImpP denote the list of
genuine pairs and the list of impostor pairs, respec-
tively. Corresponding to these lists, let GenP
0
and
ImpP
0
denote the lists of transformed version of GenP
and ImpP respectively, defined as
GenP
0
= {(StR
s
(x),StR
s
(y)) : (x,y) ∈ GenP}
ImpP
0
= {(StR
s
(x),StR
s
(y)) : (x,y) ∈ ImpP}
Thus, #GenP = #GenP
0
and #ImpP = #ImpP
0
where
the symbol # represents the number of pairs. Note
that all of them are lists, not sets. Therefore it is
possible to see identical pairs, especially in the lists
GenP
0
and ImpP
0
because there may be several identi-
cal pairs which are the transformation of different pair
of vectors, i.e. there may exists (x
1
,y
1
),(x
2
,y
2
) such
that (x
1
,y
1
) 6= (x
2
,y
2
) but (StR
s
(x
1
),StR
s
(y
1
)) =
(StR
s
(x
2
),StR
s
(y
2
)).
For a distance function d on R
n
and t ∈ R
+
, the
FAR (t) and FRR (t) are defined as follows:
FAR (t) =
#{(x,y) ∈ ImpP : d(x, y) ≤ t}
#ImpP
,
FRR(t) =
#{(x,y) ∈ GenP : d(x, y) > t}
#GenP
.
Now we can define the corresponding rates for T ∈
R
+
:
FAR
0
(T ) =
#{(X,Y ) ∈ ImpP
0
: d(X,Y ) ≤ T }
#ImpP
0
,
FRR
0
(T ) =
#{(X,Y ) ∈ GenP : d(X,Y) > T }
#GenP
.
We have the following lemma:
Lemma 2. Let s be the scaling factor in transfor-
mation StR
s
and define ε
max
= max
u∈R
n
d(su,StR
s
(u)).
Then FAR
t −
2ε
max
s
≤ FAR
0
(st) ≤ FAR
t +
2ε
max
s
,
FRR
t +
2ε
max
s
≤ FRR
0
(st) ≤ FRR
t −
2ε
max
s
.
Proof. For the first inequality, define (X,Y ) =
(StR
s
(x),StR
s
(y)) for an impostor pair (x, y) in the
list ImpP. Then by using the inequalities in Lemma
1, we have
d(x,y) ≤ t −
2ε
max
s
=⇒ d(X,Y ) ≤ s
t −
2ε
max
s
+ 2ε
max
= st
=⇒ d(x,y) ≤
st + 2ε
max
s
= t +
2ε
max
s
.
These inequalities mean that
• Any impostor pair (x,y) having distance less than
or equal to t −
2ε
max
s
, which is already counted in
the rate FAR
t −
2ε
max
s
, has its transformed pair
(X,Y ) with a distance less than or equal to st.
Therefore, this transformed pair (X,Y ) is needed
to be counted in the rate FAR
0
(st). Thus,
FAR
t −
2ε
max
s
≤ FAR
0
(st).
• Any pair (X,Y ) in the list ImpP
0
having distance
less than or equal to st, which is already counted
in the rate FAR
0
(st), has its pre-transformed im-
postor pair (x,y) in the list ImpP with a distance
less than or equal to t +
2ε
max
s
. Therefore, this im-
poster pair (x,y) is needed to be counted in the
rate FAR
t +
2ε
max
s
. Thus,
FAR
0
(st) ≤ FAR
t +
2ε
max
s
.
For the second inequality, now let (X,Y ) denote the
transformation (StR
s
(x),StR
s
(y)) for a genuine pair
Formal Accuracy Analysis of a Biometric Data Transformation and Its Application to Secure Template Generation
487

(x,y) in the list GenP. Then by using the inequalities
in Lemma 1, we have
d(x,y) > t +
2ε
max
s
=⇒ d(X,Y ) > s
t +
2ε
max
s
− 2ε
max
= st
=⇒ d(x,y) >
st − 2ε
max
s
= t −
2ε
max
s
.
These inequalities mean that
• Any genuine pair (x,y) in the list GenP having
distance greater than t +
2ε
max
s
, which is already
counted in the rate FRR
t +
2ε
max
s
, has its trans-
formed pair (X,Y ) with a distance greater than st.
Therefore, this transformed pair (X,Y ) is needed
to be counted in the rate FRR
0
(st). Thus,
FRR
t +
2ε
max
s
≤ FRR
0
(st).
• Any pair (X ,Y ) in the list GenP
0
having distance
greater than st, which is already counted in the
rate FRR
0
(st), has a pre-transformed genuine pair
(x,y) in the list GenP with a distance greater than
t −
2ε
max
s
. Therefore, this genuine pair (x, y) is
needed to be counted in the rate FRR
t −
2ε
max
s
.
Thus,
FRR
0
(st) ≤ FRR
t −
2ε
max
s
.
Theorem 2. Let d
p
be the Minkowski distance defined
on R
n
×R
n
, and let X = StR
s
(x), Y = StR
s
(y), as de-
fined before. For a given ε > 0, if a scalar s is chosen
such that s ≥ n
1/p
/ε, then
FAR (t − ε) ≤ FAR
0
(st) ≤ FAR (t + ε), and
FRR(t + ε) ≤ FRR
0
(st) ≤ FRR (t − ε) .
Proof. Let ε > 0 be given and choose s such that
s ≥ n
1/p
/ε. We already observed in the proof of Theo-
rem 1 that 2ε
max
/s ≤ n
1/p
/s ≤ ε. Using this inequality
together with the inequality
FAR
0
(st) ≤ FAR
t +
2ε
max
s
from Lemma 2, and the fact that FAR(t
2
) ≥ FAR (t
1
)
for t
2
≥ t
1
, we obtain
FAR
0
(st) ≤ FAR
t +
2ε
max
s
≤ FAR(t + ε).
This proves one of the four inequalities in the state-
ment, and the other three inequalities can be proved
similarly.
Corollary 1. For any given
¯
ε > 0, there exists T ≥
0 ∈ R such that
FAR (t) −
¯
ε ≤ FAR
0
(T ) ≤ FAR(t) +
¯
ε, and (2)
FRR(t) −
¯
ε ≤ FRR
0
(T ) ≤ FRR (t)+
¯
ε (3)
Proof. Given
¯
ε > 0 as in the statement of the corol-
lary, one can choose ε > 0 such that
FAR (t + ε) ≤ FAR(t)+
¯
ε,
FAR (t) −
¯
ε ≤ FAR(t − ε),
FRR(t − ε) ≤ FRR(t) +
¯
ε,
FRR(t) −
¯
ε ≤ FRR (t + ε),
because FAR(t) and FRR (t) can be modelled as a
continuously increasing and decreasing function pa-
rameterized by t, respectively. Now, choosing s as
suggested by Theorem 2, and combining the inequal-
ities of Theorem 2 with the inequalities above, we can
write
FAR (t) −
¯
ε ≤ FAR(t − ε) ≤ FAR
0
(st)
≤ FAR(t + ε) ≤ FAR(t) +
¯
ε, and
FRR(t) −
¯
ε ≤ FAR(t + ε) ≤ FRR
0
(st)
≤ FRR (t − ε) ≤ FRR(t) +
¯
ε.
Finally, setting T = st, we conclude
FAR (t) −
¯
ε ≤ FAR
0
(T ) ≤ FAR(t) +
¯
ε, and (4)
FRR(t) −
¯
ε ≤ FRR
0
(T ) ≤ FRR (t)+
¯
ε (5)
Remark 2. Given a biometric authentication system
that takes real-valued feature vectors as input, de-
ploys Minkowski distance d
p
in its matching algo-
rithm, and runs at false accept rate FAR (t) and false
reject rate FRR(t), Theorem 2 and its Corollary 1 as-
sure the existence of a scalar s (and T = st) that can
be used to transform the system to integer-valued vec-
tors, deploys the same d
p
in its matching algorithm,
and runs at false accept rate FAR
0
(T ) and false reject
rate FRR
0
(T ) that are arbitrarily close to FAR(t) and
FRR(t) of the original system.
Remark 3. Smaller values of s would be preferred in
cryptographic secure template generation algorithms
due to the smaller size of the resulting feature vec-
tors and the smaller threshold values. However, it
seems challenging to find a tight lower bound for s
in Theorem 2, one can address this gap between the-
ory and practice as we explain in the following re-
mark. One should also be careful to choose s suffi-
ciently large to prevent dictionary attacks. Therefore,
in the light of Theorem 2, we outline a procedure in
Algorithm 1 to determine a suitable scalar s
0
and a
threshold T
0
from a given original system. We assume
SECRYPT 2020 - 17th International Conference on Security and Cryptography
488

Algorithm 1: To determine suitable parameters s and T .
Input: t
0
,n, p,
¯
ε,I
FAR
,I
FRR
,DS,MinScalar
Output: s
0
≥ MinScalar and T
0
such that FAR
0
(T
0
) ∈
I
FAR
and FRR
0
(T
0
) ∈ I
FRR
1: Set a and b as the corresponding thresholds of
FAR (t
0
) −
¯
ε
and
FRR(t
0
) +
¯
ε
, respectively
2: t
1
← Max
a,b
3: Set c and d as the corresponding thresholds of
FAR (t
0
) +
¯
ε
and
FRR(t
0
) −
¯
ε
, respectively
4: t
2
← Min
c,d
5: ε ← Min
(t
0
−t
1
),(t
2
−t
0
)
6: s
0
← bn
1/p
/εe
7: while s
0
> MinScalar and
FAR
0
((s
0
− 1)t
0
) ∈
I
FAR
and FRR
0
((s
0
− 1)t
0
) ∈ I
FRR
over DS
do
8: s
0
← s
0
− 1
9: end while
that the original system deploys the distance function
d
p
(x,y) = (
∑
(x
i
− y
i
)
p
)
1/p
, and has some some de-
sired rates FAR(t
0
), FRR(t
0
), where FAR (t), FRR (t)
are measured over some dataset DS. For example,
one may fix t
0
so that the system runs at the equal er-
ror rate EER = FAR(t
0
) = FRR (t
0
). Our procedure
outputs a value of s
0
≥ MinScalar and a threshold
value T
0
for which the new system’s accuracy is in a
close neighborhood of the original system’s accuracy.
More particularly, new parameters will assure that
FAR
0
(T
0
) ∈ I
FAR
= [FAR(t
0
) −
¯
ε,FAR (t
0
) +
¯
ε] and
FRR
0
(T
0
) ∈ I
FRR
= [FRR(t
0
) −
¯
ε,FRR(t
0
) +
¯
ε] for a
given
¯
ε > 0, where d
p
(X,Y ) is used to compute the
distance between integer-valued vectors X = StR
s
(x)
and Y = StR
s
(y). In practice,
¯
ε should be chosen so
that the new rates FAR
0
(T
0
) and FRR
0
(T
0
) are close
to FAR(t
0
) and FRR (t
0
), respectively. The correct-
ness of Algorithm 1 follows from Theorem 2.
3 APPLICATIONS OF THE NEW
TRANSFORMATION
In this section, we evaluate our theoretical findings
over two publicly available biometric datasets: the
LFW dataset (Huang et al., 2007) for face recogni-
tion, and the keystrokes-dynamics dataset (Killourhy
and Maxion, 2009). Our reasoning for choosing these
datasets is that they are widely referenced in the lit-
erature, and the biometric features in both of these
datasets are represented as real-valued vectors. As
an application of our construction, we propose some
concrete system parameters to convert these feature
vectors into integer-valued vectors, and verify its ac-
curacy preserving property.
3.1 Labeled Faces in the Wild
We use one of the most popular public face datasets
that was presented by Gary B. Huang et. al. (Huang
et al., 2007) and named “Labeled Faces in the Wild”
(LFW). The dataset comprises more than 13,000 face
images of 5,749 people collected from the web and
1,680 of them have two or more images. Among the
four different available versions of the datasets, we
use the original version of the LFW in our experiment.
In our implementation, we have used the face
recognition (Python) module of Adam Geitgey (Geit-
gey, 2017) which he built using the face recognition
model in the Dlib library of Davis E. King (King,
2011) where the model was trained on a dataset of
about 3 million face images (King, 2017). The His-
togram of Oriented Gradients (HOG) and the Convo-
lutional Neural Network (CNN) are the two methods
that we used for face detection in our experiment. The
HOG is faster than the CNN method but less accu-
rate in detecting faces from the images. For example,
we found that CNN only failed to detect the face in
Jeff Feldman 0001.jpg while the HOG failed to de-
tect faces in 57 images in the LFW. Therefore, we uti-
lize CNN detector in our experiments and report the
results that we found.
In the pre-trained model of Davis E. King, the
Euclidean Distance (ED) is measured between two
128-dimensional facial vectors. If the distance is less
than or equal to 0.6, then two images are considered
a match otherwise, it is a mis-match. The match and
mis-match are returned as “True” and “False”, respec-
tively, by Adam Geitgey in his face recognition mod-
ule. In other words, False implies correct identifica-
tion of impostors in the set of ImpP. Here, the accu-
racy is measured as follows
Accuracy =
#True in GenP + #False in ImpP
#GenP + #ImpP
(6)
=
#GenP × (1 − FRR) + #ImpP × (1 − FAR)
#GenP + #ImpP
Each image in the dataset is labelled with a person’s
name and contains that person’s face image. In addi-
tion, some images contain faces of people other than
the person in the label. In our experiments, we as-
sume that the first detected face is the face of the
labelled person. Under this assumption, for GenP,
we find #True and #False as 231,752 and 10,505,
respectively. On the other hand, for ImpP, we find
#True and #False as 515, 817 and 86,778,222, respec-
tively. So the sizes of GenP and ImpP are 242,257
and 87,294,039, respectively. Hence, our evaluation
Formal Accuracy Analysis of a Biometric Data Transformation and Its Application to Secure Template Generation
489

yields 99.40% accuracy using the CNN method and
threshold t = 0.6 with ED; see Table 1. Note that our
accuracy evaluation confirms the results reported by
Davis E. King and Adam Geitgey (King, 2017; Geit-
gey, 2017), and also it is comparable to other state-of-
the-art models; see (Huang et al., 2007) for an exten-
sive list of results and comparisons.
3.1.1 Transforming LFW Feature Vectors
As mentioned before, a (detected) face in the image
is represented by a 128-dimensional real-valued vec-
tor, and the accuracy evaluations are performed us-
ing the ED function. In this section, we apply our
proposed transformation to obtain 128-dimensional
integer-valued feature vectors. We further replace the
ED by the Manhattan distance (MD) function. This
latter modification allows us to simplify the quadratic
distance formula to a linear one, which eventually
yields better efficiency in crpytographic computations
for secure template comparison.
In our analysis, we focus on three critical thresh-
old values t = 0.54, t = 0.6, and t = 0.66 as shown in
Table 1. These three thresholds capture FAR values
near 0.001, FAR values near 0.005, and the equal
error rate FAR = FRR ≈ 0.03; with respect to the use
of the ED function. The threshold t = 0.6 provides a
basis for comparing our results to previously reported
results in (King, 2017; Geitgey, 2017). We should
first emphasize that switching from the ED to MD has
almost negligible impact on FAR and FRR as shown
in the first two rows of Table 1. The critical part is
Table 1: ED = Euclidean Distance, MD = Manhattan Dis-
tance, MD
100
, MD
1376
= MD where the feature vector com-
ponents are scaled-then-rounded by integer 100 and 1376,
respectively.
Method FAR ≈ 0.001 FAR ≈ 0.005 EER
ED
t = 0.54 t = 0.6 t = 0.66
FRR = 0.091159 FRR = 0.043363 FRR = 0.033427
FAR = 0.000897 FAR = 0.005909 FAR = 0.033630
Accuracy = 0.9989 Accuracy 0.99399 Accuracy = 0.96637
MD
t = 4.846 t = 5.393 t = 5.941
FRR = 0.100096 FRR = 0.044989 FRR = 0.03358
FAR = 0.00087 FAR = 0.005896 FAR = 0.03365
Accuracy = 0.99885 Accuracy = 0.993995 Accuracy = 0.96635
MD
100
t = 485 t = 539 t = 594
FRR = 0.099105 FRR = 0.04497 FRR = 0.033617
FAR = 0.00091 FAR = 0.006007 FAR = 0.03428
Accuracy = 0.99882 Accuracy = 0.993886 Accuracy = 0.965718
MD
1376
t = 6668 t = 7421 t = 8175
FRR = 0.100088 FRR = 0.044973 FRR = 0.033555
FAR = 0.000873 FAR = 0.005908 FAR = 0.033702
Accuracy = 0.99885 Accuracy = 0.99398 Accuracy = 0.966299
to determine a suitable scalar s using Algorithm 1 so
as to preserve the accuracy after the StR
s
transforma-
tion. We explain the process in detail for t
0
= 5.941
(i.e. FAR(t
0
) = 0.03365 and FRR (t
0
) = 0.03358)
over the dataset DS = LFW. First, we choose
¯
ε = 0.01 so that the new system’s error rates
would satisfy FAR
0
(T
0
) ∈ I
FAR
= [FAR(5.941) −
¯
ε,FAR (5.941) +
¯
ε] = [0.02365,0.04365], and
FRR
0
(T
0
) ∈ I
FRR
= [FRR(5.941) −
¯
ε,FRR(5.941) +
¯
ε] = [0.02358, 0.04358].
Following the steps 1 to 4 in Algorithm 1,
we find the smallest ε = 0.093 such that
[FAR (5.941 − ε) , FAR(5.941 + ε)] ⊆ I
FAR
, and
[FRR(5.941 + ε),FRR(5.941 − ε)] ⊆ I
FRR
. The step
5 in Algorithm 1 initializes s
0
as shown below. Note
that p = 1 in the MD function.
s
0
= bn
1/p
/εe = b128/0.093e = 1376.
Next, we need to choose a suitable value for
MinScalar. For this, we compute the average fea-
ture vector a = [a
1
,...,a
128
] over all 13233 fea-
ture vectors in the LFW dataset, where a
i
is the
average of the absolute values of the i’th com-
ponents of the feature vectors. We find that
min(a) = min({a
i
}) = 0.035,max(a) = max({a
i
}) =
0.37, with an average of Mean(a) =
∑
a
i
/128 =
0.098. We choose s = MinScalar = 100, and obtain
min(StR
s
(a)) = 4,max(StR
s
(a)) = 37, with an aver-
age of Mean(StR
s
(a)) = 10. This ensures that creat-
ing a dictionary for the set of transformed feature vec-
tors is an infeasible task for an attacker because 10
128
feature vectors are expected on average. Finally, the
Algorithm 1 returns
s
0
= 100 and T
0
= bs
0
t
0
e = 594,
and the new system’s rates become FAR
0
(594) =
0.03428 and FRR
0
(594) = 0.033617, which are ex-
tremely close to the original system’s rates. Please
see the results in the last two rows of Table 1 for
the new system derived from the original system with
the threshold values of t
0
= 4.846, t
0
= 5.393, and
t
0
= 5.941. As expected, the new system’s rates are
close to the original system’s rates.
In Figure 1, we show the Receiver Operating
Characteristic (ROC) curve and the Area Under Curve
(AUC) for ED, MD, MD
100
and MD
1376
. In all the
following figures, the False Positive Rate and True
Positive Rate represent FRR and (1 − FAR), respec-
tively. The curves in Figure 1a depict that the dif-
ferences among the used techniques are very small
which is further supported by AUC. It shows that the
AUC of ED and MD are 0.98604 and 0.98601, re-
spectively. In other words, the area differ by 0.00003
only. Furthermore, we find the AUC of MD
100
and MD
1376
as 0.98595 and 0.98602, respectively.
Clearly, MD
1376
is a better choice than MD
100
in
terms of accuracy. However, note that the loss of
0.00006 in accuracy, if MD
100
is used, is actually very
small, and it may be tolerable in practice given the ef-
ficiency gains in choosing smaller scalars. The ROC
SECRYPT 2020 - 17th International Conference on Security and Cryptography
490
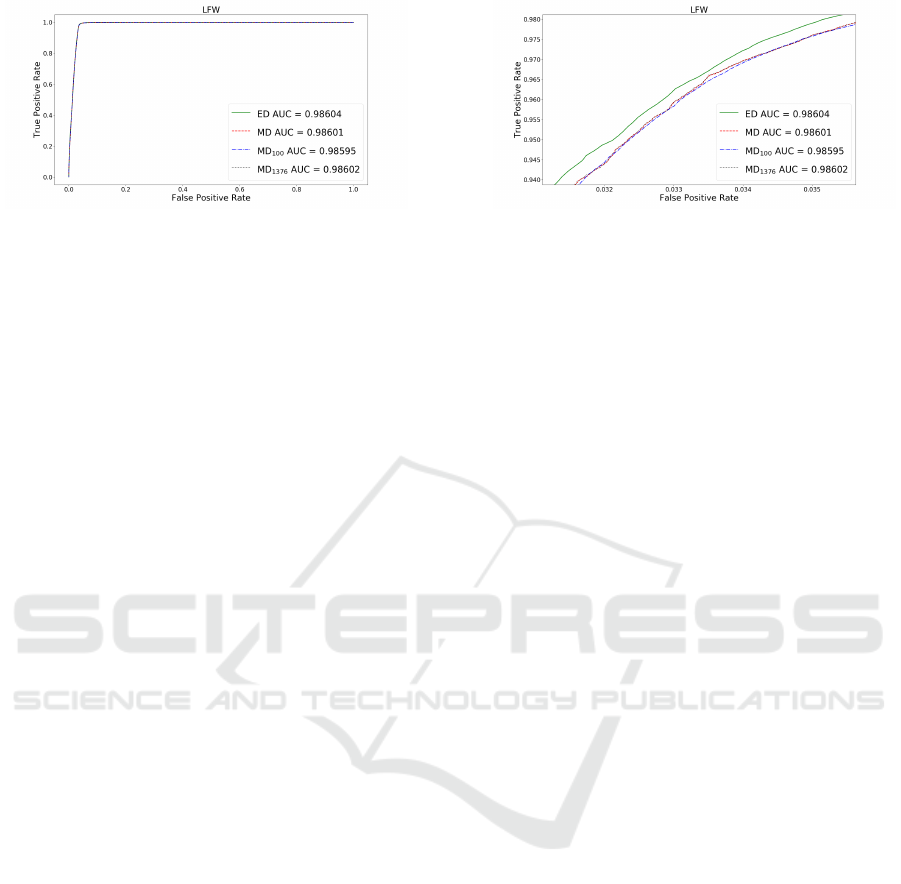
(a) Normal ROC. (b) Zoomed in near EER.
Figure 1: ROC curve and the area underneath called Area under curve (AUC).
curves differences among our used techniques near
the EER neighborhood are shown in Figure 1b, which
confirm that relative differences are not significant.
3.2 Keystroke-dynamics
The public keystroke-dynamics dataset of Killourhy
and Maxion (Killourhy and Maxion, 2009) contains
the keystroke-timing of 51 subjects typing the same
password in 8 different sessions where each session
consists of 50-repetition and only one session per day
was performed. From each (password) typing event,
31 timing features were extracted. The authors imple-
mented 14 anomaly-detection algorithms using the R
statistical programming language. The performance
of each detector was measured by generating an re-
ceiver operating characteristic (ROC) curve using the
anomaly scores. The authors have reported 0.153 as
the average equal error rate (EER) using MD func-
tion. Note that the subject identifiers are not in the
range of s001 to s051 and for further details please
see (Killourhy and Maxion, 2009).
Using the MD, we compute the error rates and se-
lect the two subjects that exhibit minimum and maxi-
mum equal error rate (EER). Actually, these two sub-
jects are tantamount to the best- and worst-case which
we believe are the best candidates to show the impact
of our transformation. If the two extreme error rates
satisfy the conditions, then do all the other values be-
cause they lie in the range of the two extremes. Using
the Python programming language, we find the aver-
age EER to be 0.153, that matches the rate as reported
in (Killourhy and Maxion, 2009).
3.2.1 Transforming Keystroke Feature Vectors
After computing the error rates for each of the
51-subject, our implementation results show that
subjects s055 and s049 have minimum and maximum
EER, respectively. In Table 2, the error rates of
both s055 and s049 are provided at EER threshold
points. In this context the length of the feature
vector is 31. We find t
0
= 1.509 and t
0
= 6.718
as the EER threshold for s055 and s049, respec-
tively. Using the FRR and FAR values at EER
threshold, for s055, we choose
¯
ε = 0.005 such that
FAR
0
(T
0
) ∈ I
FAR
= [FAR (1.509) −
¯
ε,FAR (1.509) +
¯
ε] = [0.007,0.017], and FRR
0
(T
0
) ∈ I
FRR
=
[FRR(1.509) −
¯
ε,FRR(1.509) +
¯
ε] = [0.005,0.015].
Similarly, for s049, we choose
¯
ε = 0.02 such that
FAR
0
(T
0
) ∈ I
FAR
= [FAR (6.718) −
¯
ε,FAR (6.718) +
¯
ε] = [0.46,0.50], and FRR
0
(T
0
) ∈ I
FRR
=
[FRR(6.718) −
¯
ε,FRR(6.718) +
¯
ε] = [0.46, 0.50].
Following the steps 1 to 4 in Algorithm 1, we
find the smallest ε = 0.061 and ε = 0.032 for s055
and s049, respectively, such that FAR
0
and FRR
0
lie
in the range of the error rates of the corresponding
subjects. The step 5 in Algorithm 1 initializes the
corresponding s
0
for s055 and s049 as b31/0.061e =
508, and b31/0.032e = 969, respectively.
Next, we need to choose a suitable value for
MinScalar. For this, we compute the average fea-
ture vector a = [a
1
,...,a
31
] over all 400 feature vectors
of each subject, where a
i
is the average of the abso-
lute values of the i’th component of the feature vec-
tors. For s055, we find min(a) = 0.0184, max(a) =
0.2344 and Mean(a) =
∑
a
i
/31 = 0.0964. We choose
s = MinScalar = 100, and obtain min(StR
s
(a)) = 2,
max(StR
s
(a)) = 23 and Mean(StR
s
(a)) = 10. This
ensures that creating a dictionary for the set of trans-
formed feature vectors is an infeasible task for an at-
tacker because 10
31
≈ 2
93
feature vectors are expected
on average. Finally, the Algorithm 1 returns
s
0
= 100 and T
0
= bs
0
t
0
e = 151.
On the other hand, we find the new system’s rates
become FAR
0
(151) = 0.012 and FRR
0
(151) = 0.010
that are the same as the original system’s EER. Please
see the two-column MD
s
in Table 2 for a complete
list of parameters for the new system (integer-valued)
derived from the original system (real-valued). As ex-
pected, the new system’s rates are close to the origi-
nal system’s rates. Similarly, we perform the same
operations for s049 and the results are provided in
Formal Accuracy Analysis of a Biometric Data Transformation and Its Application to Secure Template Generation
491
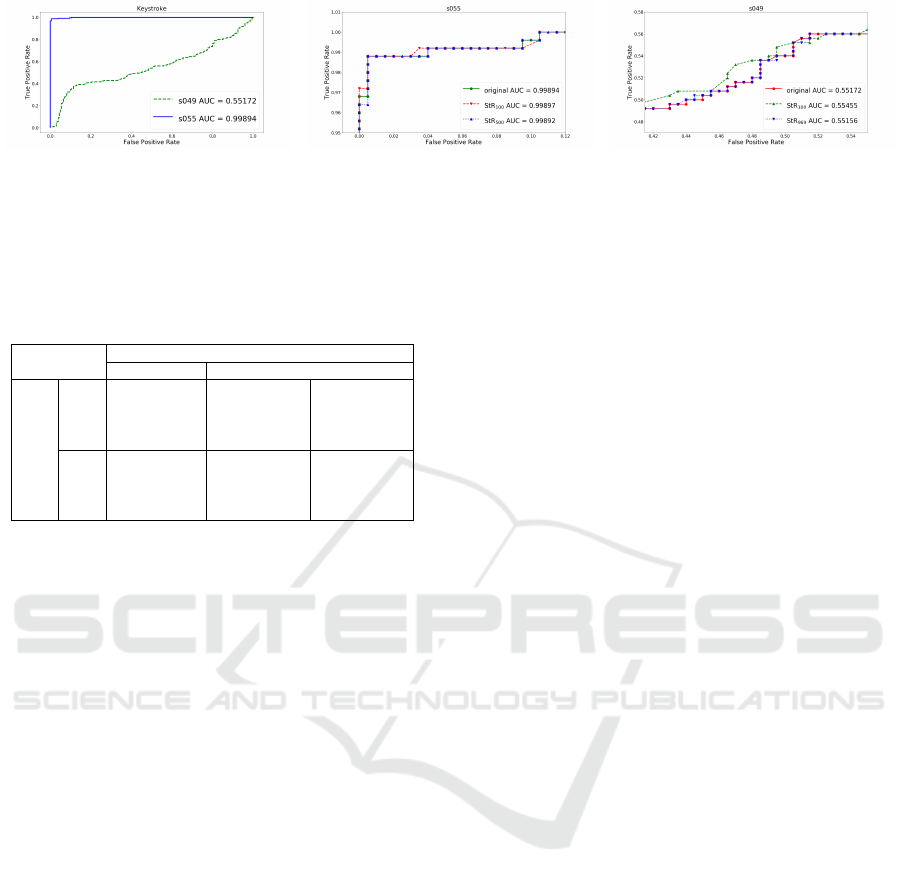
(a) ROC curve for s055 and s049. (b) Variation near EER. (c) Variation near EER.
Figure 2: ROC curve, AUC and the curve variation near EER for s055 and s049.
Table 2: The FRR and FAR values for the subjects s055 and
s049 by computing the MD using both real- and integer-
valued feature vectors and using the EER threshold as point
of reference.
Method
MD MD
s
EER
s055
s = 100 s = 500
t = 1.510 t = 151 t = 755
FRR = 0.010 FRR
0
= 0.010 FRR
0
= 0.010
FAR = 0.012 FAR
0
= 0.012 FAR
0
= 0.012
s049
s = 100 s = 969
t = 6.718 t = 672 t = 6510
FRR = 0.480 FRR
0
= 0.470 FRR
0
= 0.480
FAR = 0.480 FAR
0
= 0.464 FAR
0
= 0.480
Table 2. Note that the use of smallest scalar s does
not necessarily yield EER threshold in the new sys-
tem and the result of s049 depicts such a scenario for
s = 100. But if one is interested in EER, then any
scalar greater than the smallest scalar can be used and
Algorithm 1 guarantees that those scalars satisfy the
error rates range.
Like the LFW dataset, we provide the ROC curve
and AUC for keystroke in Figure 2. Both the ROC
curve and AUC of s055 are much better than s049
as shown in Figure 2a and we find the AUC of s055
and s049 as 0.99894 and 0.55172, respectively. It is
evident that all the other subjects’ curves and AUCs
lie between the two curves in Figure 2a. In order to
show the effects of our choice of scalars, we provide
the ROC curves near the EER of s055 and s049 in
Figure 2b and Figure 2c, respectively. In case of s055,
we have the AUC value of 0.99897 and 0.99892 by
using s = 100 and s = 500, respectively. Similarly, we
find the AUC value of 0.55455 and 0.55156 by using
s = 100 and s = 969, respectively. The AUC values of
s = 100 are greater than s = 500 and s = 969 for both
s055 and s049. As expected, larger scalars preserve
the accuracy of the original system better, however,
the loss in accuracy is not significant when smaller
scalars are used as shown in Figure 2b and Figure 2c.
4 A CASE ANALYSIS
We have so far proposed and analyzed a method for
transforming biometric authentication systems based
on real-valued feature vectors into biometric au-
thentication systems based on integer-valued feature
vectors. This allows real-valued feature vectors to
be used as input to some cryptographic algorithms,
whence to enhance the security of the matching al-
gorithms while preserving the accuracy rates of the
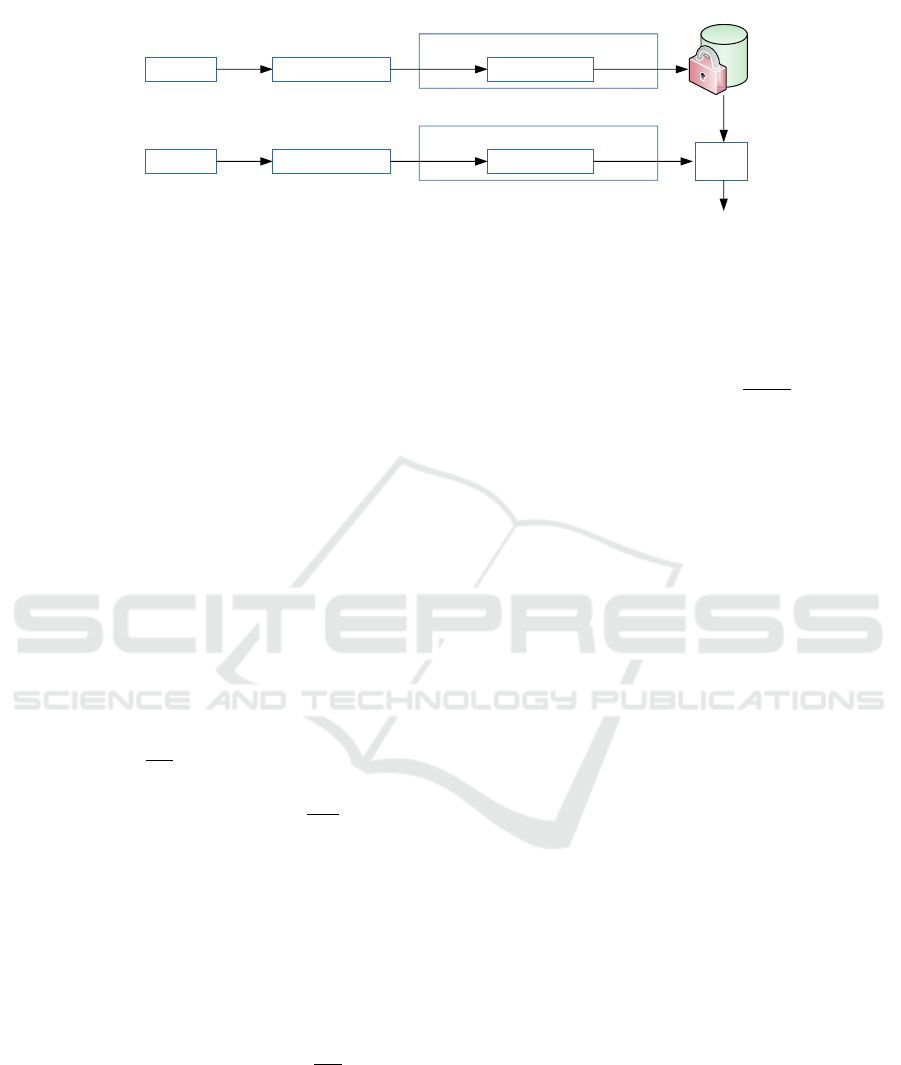
original (non-cryptographic) systems. Our proposed
biometric authentication system (Enrollment and Ver-
ification Phase) is shown in Figure 3. In the following
sections, we make our ideas more concrete by imple-
menting a previously proposed algorithm NTT-Sec
(Karabina and Canpolat, 2016) over the face (Huang
et al., 2007) and keystroke-dynamics (Killourhy and
Maxion, 2009) datasets. We choose NTT-Sec in our
implementation because a second factor (e.g. user
password, or public/private key) is not required in
the system, and therefore it offers certain advantages
over cancelable biometrics or homomorphic encryp-
tion methods. NTT-Sec also seems to be more ad-
vantageous than some of the known biometric cryp-
tosystems (e.g. fuzzy extractors) because it is highly
non-linear, which yields some built-in security against
distinguisahbility and reversibility attacks. For more
details about the technical details on NTT-Sec and its
security analysis, we refer the reader to (Karabina and
Canpolat, 2016).
4.1 Modifying NTT-Sec to NTT-Sec-R
NTT-Sec was originaly proposed to work with bi-
nary feature vectors. On the other hand, the face
and keystroke-dynamics datasets (Huang et al., 2007;
Killourhy and Maxion, 2009), consists of real-valued
feature vectors. Therefore, we first need to modify
NTT-Sec to NTT-Sec-R so it can handle real-valued
vectors.
The original NTT-Sec is based on two algorithms
called Proj (project) and Decomp (decompose). The
Proj algorithm maps (projects) a length n binary vec-
SECRYPT 2020 - 17th International Conference on Security and Cryptography
492
Biometric Trait
Feature Extraction
(real-valued vector)
Integer-valued vector
Ntt-Sec-R
Enrollment Phase
StR
s
Transformation
Cryptographic
Algorithm
Biometric Trait
Feature Extraction
(real-valued vector)
Integer-valued vector
Ntt-Sec-R
StR
s
Transformation
Cryptographic
Algorithm
Matching
Algorithm
Match/Mismatch
Verification Phase
Figure 3: Block Diagram of the proposed system.
tor (considered as the feature vector) to a finite field
element (considered as its secure template) using a
priori-fixed set of public parameters and a factor ba-
sis. Given a pair of secure templates, the Decomp
algorithm can detect whether the templates originate
from a pair of binary feature vectors that differ in
at most t indices for some priori-fixed error thresh-
old value t. In Decomp, the detection is achieved
by checking whether a particular finite field element
can be written (decomposed) as a product of the fac-
tor basis elements in a certain form. Computations in
NTT-Sec are performed in a cyclotomic subgroup G
of the multiplicative group of a finite field. We adapt
the same group structure in our modification. More
specifically, let F
q
be a finite field with q elements
where q = p
m
. Let c ∈ F
q
be a non-quadratic residue
with minimal polynomial of degree m over F
p
. Let
F
q
2
= F
q
(σ) be a degree two extension of F
q
where
σ is a root of x
2
− c. F
q
2
has a cyclotomic subgroup
G of order q and every non-identity element in G can
be represented as
a+σ
a−σ
for some a ∈ F
q
. Moreover, we
say an element a ∈ G is k-decomposable over F
p
if it
can be written as a product a =
∏
k
i=1
a
i
+σ
a
i
−σ
for some
F
p
-elements a
1
,a
2
,...a
k
.
Modifications. Now, assume that n and t are some
fixed values that represent the length of feature vec-
tors and the system threshold value, respectively. We
choose a scaling factor s (to be used in StR
s
transfor-
mation) and let T =
b
st
e
be the new threshold value.
As in NTT-Sec, we choose a prime number p such
that p > 2n, an integer m such that m ≥ T , a set
B = {g
1
,g
2
,...,g
n
} such that 1 ≤ g
i
≤
p−1
2
for each i.
We further choose m to be prime in order to avoid any
potential attacks exploiting subfields. We define new
functions NTT-Hash-R and NTT-Match-R as a re-
placement of the original Proj and Decomp functions
in NTT-Sec.
The algorithm NTT-Hash-R maps (or hashes) a
given real-valued feature vector x = (x
1
,x
2
,...,x
n
) to
a group element in G as follows: It first computes X =
(X
1
,...,X
n
) = StR
s
(x) using the StR
s
transformation.
Then using the basis B = {g
1
,g
2
,...,g
n
}, it computes
the hash value
NTT-Hash-R(x) =
n
∏
i=1
g
i
+ σ
g
i
− σ
X
i
.
We note that the output of NTT-Hash-R serves as the
secure template for x. The main difference between
the modified NTT-Hash-R and the original Proj is
that NTT-Hash-R can handle real-valued vectors.
The algorithm NTT-Match-R works very sim-
ilar to Decomp. Assume a hash value h
x
=
NTT-Hash-R(x) for some x = (x
1
,...,x
n
), a real-
valued vector y = (y
1
,...,y
n
), and a positive real num-
ber t are given. The goal of NTT-Match-R is to
decide whether
∑
i=1
|x
i
− y
i
| ≤ t or not. To achieve
this goal, the following process is performed: It com-
putes h
y
= NTT-Hash-R(y) using NTT-Hash-R, and
then it decides whether the G-element h/h
y
is
b
st
e
-
decomposable. Furthermore, if the retreived F
p
-
elements belong to the basis B, NTT-Match-R re-
turns Match, otherwise Mismatch.
We pack all of these parameters under the set
SP = {n,t,s, p, m, B}, and call this as the system
parameter set. Note that SP can be made pub-
lic, and commonly used in the NTT-Hash-R and
NTT-Match-R algorithms.
4.2 Implementation Results, Security
Analysis, and Comparisons
First, we discuss the implementation details of the
NTT-Sec-R algorithm over the LFW dataset (Huang
et al., 2007) and the keystroke-dynamics dataset (Kil-
lourhy and Maxion, 2009). For the LFW dataset, we
align our parameter set with the parameters from Ta-
ble 1. We set n = 128, t = 5.941, and s = 100. Then,
we set p = 257 (smallest prime p ≥ 2n) and m = 599
(smallest prime m ≥ T =
b
st
e
= 594). The param-
eters for the keystroke-dynamics datasets are chosen
similarly, and they are same as in Table 2; see Ta-
ble 3 for a complete list of the parameters. In Ta-
Formal Accuracy Analysis of a Biometric Data Transformation and Its Application to Secure Template Generation
493

Table 3: The systems parameters (SP), secure template
bit size, and timing results in millisecond (ms) using
the NTT-Sec-R algorithm on face and keystroke public
datasets.
SP
Template size (Bit)
Time (ms)
n t s p m Hash Match
Face 128 5.941 100 257 599 5391 68.17 309.07
Keystroke
s055 31 1.510 100 67 157 1099 3.68 9.21
s049 31 6.718 100 67 673 4711 21.65 322.63
ble 3, we also report on the bit size of secure biomet-
ric template. Recall that a secure template (the out-
put of NTT-Hash-R) is represented as an F
q
element
with m × (blog
2
pc + 1) bits. Hashing (secure tem-
plate generation) and matching times are also reported
in Table 3. We confirm that NTT-Sec-R does not
alter the accuracy-preserving properties of our con-
struction and our experimental results confirm that the
FRR and FAR values of the NTT-Sec-R algorithm are
same as that of the MD when integer-valued feature
vectors are used. All the codes are written in C pro-
gramming language. The results are obtained on an
Intel Core i7 − 7700 CPU @ 3.60GHz desktop com-
puter that is running Ubuntu 16.04 LTS. The timings
are based on a high level implementation of the al-
gorithms and only the GCC compiler is utilized for
optimization using the argument -O3.
A Security Analysis. The security of NTT-Sec-R
should be discussed with respect to the irreversibility
and indistinguishability notions as defined in (Kara-
bina and Canpolat, 2016). They are formally mod-
elled between a challenger and a computationally
bounded adversary. For irreversibility, several at-
tacks have been considered in (Karabina and Canpo-
lat, 2016), including guessing attack, brute force at-
tack, and discrete logarithm attack. It was also ar-
gued in (Karabina and Canpolat, 2016) that reversing
the templates is the best strategy for an adversary in
a distingushing attack. Following the security analy-
sis in (Karabina and Canpolat, 2016), we inspect that
the best strategy for an adversary to attack our mod-
ified NTT-Sec-R (with respect to both irreversibility
and indistinguisahbility notions) is to solve the dis-
crete logarithm problem in the underlying cyclotomic
group. We provide some details in the following.
Assuming g is a generator of G, the adversary
solves e := log
g
h and e
i
:= log
g
g
i
for each i = 1, . . . , n
using a discrete-logarithm solver. Then the adversary
gets an equation
e =
n
∑
i=1
e
i
X
i
mod p
m
since |G| = p
m
. Using a Knapsack-solver, the adver-
sary finds a solution X
1
,...,X
n
; and recovers X. As-
suming the cost of computing the discrete logarithm
of an element in G is C
DLP
and the cost of solving the
above modular Knapsack problem is C
Knapsack
, then
the total cost is
(n + 1)C
DLP
+C
Knapsack
.
Discrete logarithms in F
p
2m
can be computed in a
time bounded by (max(p,m))
O(log
2
m)
; see Theorem
3 in (Barbulescu et al., 2014). Ignoring the cost
C
Knapsack
of the underlying Knapsack problem, we es-
timate the cost of this discrete logarithm attack to be
(n+1)(max(p,m))
log
2
m
. Therefore, based on the val-
ues of n, p and m from Table 3, we estimate that cost
of discrete logarithm based attacks over the LFW face
dataset, the Subject s055, and the Subject s049 are
2
92
, 2
58
, and 2
93
, respectively.
Revocability of Templates. Another im-
portant security property is the cancella-
bility/revocability/renewability of templates.
NTT-Sec-R naturally allows this property as follows.
Instead of using the same public system parameters
for each user, one can make the system parameters
user specific. This can be achieved in (at least) two
different ways. First, the server can generate a public
system parameter set per user. If a user’s template is
stolen or revoked, then a new set of parameters can
be generated for that user, and a new template can be
enrolled. This would also provide an extra advantage
for the indistinguishability of the templates, because
now template spaces (F
q
2
) become algebraically
independent of each other. As a second method,
each user can derive his own system parameter set
from a secret password or a token. Then the user
can generate and enroll his template in the server. At
the time of authentication, the user can regenerate
the parameter set, compute his template, and send
them to the server as part of his query. The server
proceeds as before and can authenticate the user.
This second approach makes the reversibility and
distinguishability problems much harder because now
an attacker has to search for p and an ordered base
elements g
i
, i = 1, ..., n, which belong to a set of size
approximately (p/2)(p/2 − 1)···(p/2 − (n − 1)).
Comparisons. We provide a comparison between our
method and four other relevant and recently proposed
methods for face template protection. In (Feng et al.,
2010), Feng et al. combine distance preserving di-
mensionality reduction transformation, a discriminal-
ity preserving transformation, and a fuzzy commit-
ment scheme. The method in (Feng et al., 2010) re-
quires assigning a random secret token to each user
(namely, a random projection matrix) during enroll-
ment; and users need to provide their token dur-
ing authentication. Therefore, the scheme in (Feng
et al., 2010) can be seen as a two factor authentica-
tion scheme.
SECRYPT 2020 - 17th International Conference on Security and Cryptography
494
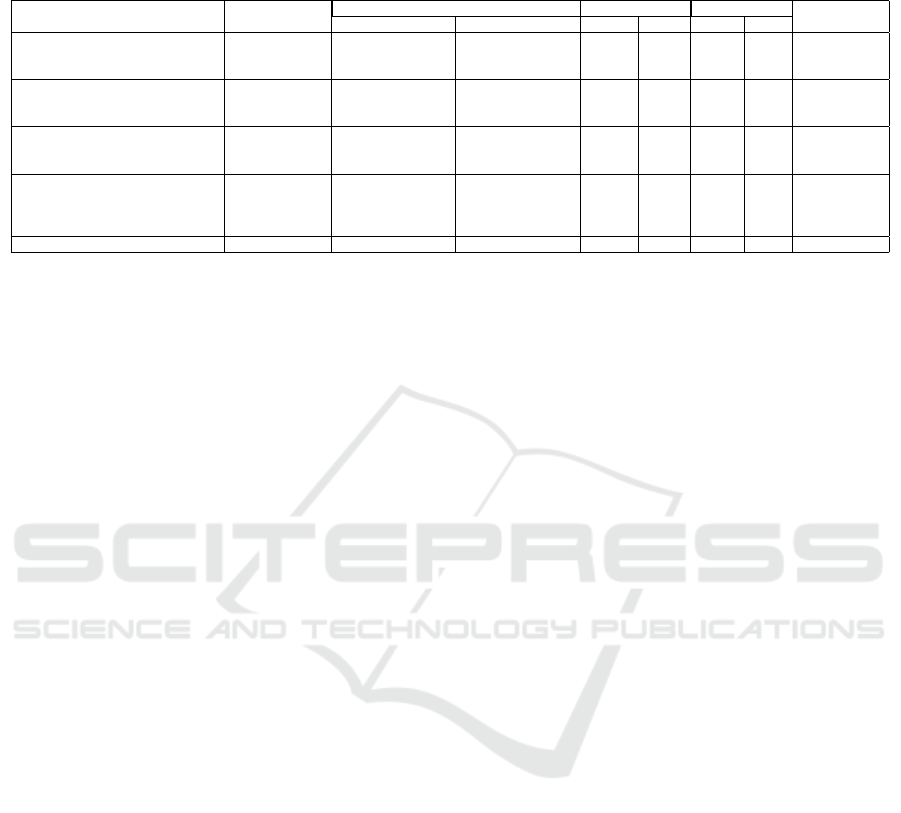
Table 4: Before/After = No/Using cryptographic algorithm, N/P = Not provided, Enroll = Enrollment, and Auth = Authen-
tication. For the LFW dataset, before and after results show the MD results using the respective scalar recommended by
Algorithm 1.
Dataset
GAR@FAR EER Secret Multifactor
Before After Before After Enroll. Auth. Authentication
Feng et al. (Feng et al., 2010)
FERET
N/P N/P
21.66% 3.62%
Yes Yes YesCMU-PIE 18.18% 8.26%
FRGC 31.75% 9.13%
Pandey et al. (Pandey et al., 2016)
Extended Yale B
N/P
96.49%@0FAR
N/P
0.71%
Yes No NoCMU-PIE 90.13%@0FAR 1.14%
Multi-PIE 97.12%@0FAR 0.90%
Jindal et al. (Jindal et al., 2019)
FEI
N/P
99.98%@0FAR
N/P
0.01%
Yes Yes YesCMU-PIE 99.98%@0FAR 1.14%
Color FERET 99.24%@0FAR 0.38%
Boddeti (Naresh Boddeti, 2018)
LFW 94.56%@0.1FAR 94.53%@0.1FAR
N/P N/P Yes Yes No
IJB-A 45.92%@0.1FAR 45.78%@0.1FAR
FaceNet and FHE (2 decimal digits) IJB-B 48.31%@0.1FAR 48.31%@0.1FAR
CASIA 84.70%@0.1FAR 84.68%@0.1FAR
Our method LFW 89.99%@0.1%FAR 90.09%@0.1%FAR 3.36% 3.39% No No No
The scheme in (Pandey et al., 2016) uses deep Convo-
lutional Neural Network (CNN) to map face images
to maximum entropy binary (MEB) codes. Each user
is assigned a unique random MEB code during en-
rollment, and a deep CNN is used to learn a robust
mapping of users’ face images to their MEB codes. A
cryptographic hash of the MEB code is stored on the
server side, which represents the secure template of
the underlying biometric data. Plain MEB codes are
not needed during authentication, because a queried
face image goes through the already trained CNN, and
the hash of its output is compared to the stored hash
value. It is claimed in (Pandey et al., 2016) that even
if an attacker knows the CNN parameters of a user,
he cannot obtain significant advantage to attack the
system.
The method by Jindal et al. in (Jindal et al., 2019)
also uses deep CNN similar to the method in (Pandey
et al., 2016), but (Jindal et al., 2019) improves the
matching performance over (Pandey et al., 2016) by
using user specific random projection matrices. Sim-
ilar to the method in (Feng et al., 2010), each user
is assigned a random secret token during enrollment;
and users need to provide their token during authenti-
cation.
The method in (Naresh Boddeti, 2018) uses fully
homomorphic encryption (FHE), where each user has
to generate and manage her public and private key
pair. In a typical application, a user stores her private
key on his device, encrypts her biometric informa-
tion under her private key, and enrolls this encrypted
template through a server. At the time of authentica-
tion, the server receives another encrypted template
and uses the homomorphic encryption properties to
compute the (encrypted) distance between two tem-
plates.
Our scheme does not require using user specific
secret, or public/private keys. As a result, it can be
thought as a single factor authentication scheme. User
specific secrets can easily be adopted in our scheme to
obtain extra security (e.g., cancelable templates); see
our revocability of templates discussion in the security
analysis part above for more details. This would also
increase the matching accuracy of the system similar
to the improvements gained in earlier work due to use
of user-specific secrets.
In summary, our proposed scheme provides rea-
sonable security levels with comparable performance
with respect to previously known systems but comes
with an advantage of not requiring any user specific
secrets or training during enrollment and authentica-
tion. Our comparisons are summarized in Table 4.
Finally, we should note that it is challenging to
make a global comparison between the matching ac-
curacy of different methods. This is mainly because
of the use of different datasets, feature extraction al-
gorithms, and accuracy measures. For example, er-
ror rates over LFW are not reported in (Feng et al.,
2010; Pandey et al., 2016; Jindal et al., 2019). And
the reason for the difference between our error rates
and the error rates as reported in (Naresh Boddeti,
2018) over LFW is that (Naresh Boddeti, 2018) uses
FaceNet and we use ResNet for feature extraction. We
chose ResNet in our implementation because ResNet
has been more commonly used for comparisons over
LFW, and that ResNet and FaceNet are comparable in
terms of their accuracy. It should be clear from the ac-
curacy preserving properties of our construction that
deploying FaceNet in our scheme would yield error
rates which are arbitrarily close to the rates in (Naresh
Boddeti, 2018).
Formal Accuracy Analysis of a Biometric Data Transformation and Its Application to Secure Template Generation
495

5 CONCLUSION
We presented a method to create secure biometric
templates from real-valued feature vectors. We ver-
ified our theoretical findings by implementing a re-
cently proposed secure biometric template generation
algorithm over face and keystroke public data sets.
We expect that our new construction and its explicit
accuracy analysis will enable known cryptographic
techniques to protect biometric templates at a larger
scale.
ACKNOWLEDGEMENTS
This work was supported by the U.S. National Sci-
ence Foundation (award number 1718109). The state-
ments made herein are solely the responsibility of the
authors.
REFERENCES
Banerjee, S. P. and Woodard, D. L. (2012). Biometric au-
thentication and identification using keystroke dynam-
ics: A survey. Journal of Pattern Recognition Re-
search, 7(1):116–139.
Barbulescu, R., Gaudry, P., Joux, A., and Thom
´
e, E. (2014).
A heuristic quasi-polynomial algorithm for discrete
logarithm in finite fields of small characteristic. In
Advances in Cryptology – EUROCRYPT 2014, pages
1–16.
Blanton, M. and Gasti, P. (2011). Secure and effi-
cient protocols for iris and fingerprint identification.
ESORICS’11, European Symposium on Research in
Computer Security, pages 190–209.
Bodo, A. (1994). Method for producing a digital signature
with aid of a biometric feature. German patent DE,
42(43):908.
Bours, P. and Barghouthi, H. (2009). Continuous authen-
tication using biometric keystroke dynamics. In The
Norwegian Information Security Conference (NISK),
volume 1, pages 1–12.
Fairhurst, M. and Da Costa-Abreu, M. (2011). Using
keystroke dynamics for gender identification in social
network environment. In 4th International Conference
on Imaging for Crime Detection and Prevention 2011
(ICDP 2011), pages 1–6.
Feng, Y. C., Yuen, P. C., and Jain, A. K. (2010). A hy-
brid approach for generating secure and discriminat-
ing face template. IEEE Transactions on Information
Forensics and Security, 5(1):103–117.
Geitgey, A. (2017). Face recognition. https://github.
com/ageitgey/face recognition, last accessed: May
18, 2020.
Huang, G. B., Ramesh, M., Berg, T., and Learned-Miller,
E. (2007). Labeled faces in the wild: A database for
studying face recognition in unconstrained environ-
ments. Technical Report 07-49, University of Mas-
sachusetts, Amherst. http://vis-www.cs.umass.edu/
lfw/, last accessed: May 18, 2020.
Jindal, A. K., Chalamala, S. R., and Jami, S. K. (2019). Se-
curing face templates using deep convolutional neu-
ral network and random projection. In IEEE Inter-
national Conference on Consumer Electronics, ICCE
2019, pages 1–6.
Kanade, S., Petrovska-Delacr
´
etaz, D., and Dorizzi, B.
(2009). Cancelable iris biometrics and using error cor-
recting codes to reduce variability in biometric data.
In IEEE Conference on Computer Vision and Pattern
Recognition, CVPR 2009, pages 120–127.
Karabina, K. and Canpolat, O. (2016). A new cryptographic
primitive for noise tolerant template security. Pattern
Recognition Letters, 80:70 – 75.
Killourhy, K. S. and Maxion, R. A. (2009). Comparing
anomaly-detection algorithms for keystroke dynam-
ics. In IEEE/IFIP International Conference on De-
pendable Systems & Networks, 2009, DSN’09, pages
125–134.
King, D. E. (2011). Dlib library. http://dlib.net/, last ac-
cessed: May 18, 2020.
King, D. E. (2017). High quality face recognition with
deep metric learning. http://blog.dlib.net/2017/02/
high-quality-face-recognition-with-deep.html, last
accessed: May 18, 2020.
Naresh Boddeti, V. (2018). Secure face matching using
fully homomorphic encryption. In 2018 IEEE 9th In-
ternational Conference on Biometrics Theory, Appli-
cations and Systems (BTAS), pages 1–10.
Natgunanathan, I., Mehmood, A., Xiang, Y., Beliakov, G.,
and Yearwood, J. (2016). Protection of privacy in bio-
metric data. IEEE Access, 4:880–892.
Pandey, R. K., Zhou, Y., Kota, B. U., and Govindaraju, V.
(2016). Deep secure encoding for face template pro-
tection. In 2016 IEEE Conference on Computer Vision
and Pattern Recognition Workshops (CVPRW), pages
77–83.
Rathgeb, C., Breitinger, F., Busch, C., and Baier, H. (2014).
On application of bloom filters to iris biometrics. IET
Biometrics, 3(4):207–218.
Schmidt, G., Soutar, C., and Tomko, G. (1996). Fingerprint
controlled public key cryptographic system (1996).
US Patent, 5541994.
Tuyls, P., Akkermans, A., Kevenaar, T., Schrijen, G.-J.,
Bazen, A., and Veldhuis, R. (2005). Practical bio-
metric authentication with template protection. Audio-
and Video-Based Biometric Person Authentication,
Lecture Notes in Computer Science, 3546:436–446.
SECRYPT 2020 - 17th International Conference on Security and Cryptography
496
