
Hand Detection Algorithm: Pre-processing Stage
Raissa Likhonina
Department of Signal Processing, Czech Academy of Sciences, Institute of Information Theory and Automation,
Pod Vodárenskou věží 4, Prague 8, Czech Republic
Keywords: QRD RLS Lattice Algorithm, Hypothesis Testing, System Identification, Exponential Forgetting,
Hand Detection, Ultrasound.
Abstract: The present work describes a new approach to hand detection based on QRD Recursive Least Squares
(RLS) Lattice algorithm and probabilistic approach to system identification. The described method is
supposed to be used as a pre-processing stage for a hand gesture recognition application based on ultrasound
technology. The approach includes a noise cancellation concept and uses linear Finite Impulse Response
(FIR) based regression models in MATLAB environment. Within the algorithm the hypothesis testing
technique is implemented. The work shows the results of computation using real data from an ultrasound
device. The final version of the algorithm is supposed to be implemented on the embedded Xilinx Zynq
device.
1 INTRODUCTION
Hand gesture recognition is a technique, which
becomes very popular in many fields including
automobile industry, smart home/buildings,
applications for disabled people, etc. Various
technologies used for collecting raw data from hand
movement are available nowadays. They include
wired gloves, stereo cameras, depth-aware cameras,
thermal cameras and radar. The advantages and
limitations of hand gesture recognition applications
are well described in (Pradipa & Kavith, 2014;
Premaratne, 2014).
In this work a different approach to a hand
recognition problem is offered. This approach is
based on ultrasound technology, which promises to
ensure low cost, low power consumption and
friendly human-machine interface (HMI).
The approach is supposed to be based on
adaptive Recursive Least Squares (RLS) algorithms
(Moonen, 1999), which are popular in digital signal
processing applications.
In many works devoted to RLS algorithms it was
pointed out that a certain difficulty in
implementation of the algorithms on hardware
platforms exists. It is caused by high computational
complexity of RLS algorithms and certain problems
with numerical stability (Kadlec, 1985; Kadlec,
1986; Moonen, 1999). Therefore, a large number of
investigations were made to handle these issues. To
decrease computational complexity, fast versions of
RLS algorithms and several approaches for their
optimization were developed (Cioffi & Kailath,
1984; Constantinides et al., 2004; Diniz, 2002; Fang
et al., 2002; Lee et al., 1981; Moonen, 1999). To
make the algorithms numerically robust, a so-called
QR decomposition (QRD) of the information matrix
was proposed (Bottomley & Alexander, 1991;
Moonen, 1999; Regalia, 1993).
This work provides a new approach to hand
presence detection. The method is based on QRD
RLS Lattice algorithm with exponential forgetting
(EF) and double precision arithmetic (Kadlec &
Likhonina, 2016) and extended with hypothesis
probability estimation of the model order (Kadlec,
1985; Peterka, 1981). The approach is supposed to
serve as a pre-processing stage in a hand gesture
recognition application based on ultrasound
technology.
2 HAND DETECTION
APPROACH
This section describes the algorithmic technique as
well as the basic concept of the algorithm working
with real ultrasound data, which were obtained from
Likhonina, R.
Hand Detection Algorithm: Pre-processing Stage.
DOI: 10.5220/0009885206950701
In Proceedings of the 17th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2020), pages 695-701
ISBN: 978-989-758-442-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
695

the device equipped with microphones and the
ultrasound speaker.
2.1 Algorithmic Technique
In this work a noise cancellation technique well
described in (Moonen, 1999) is used. The basic
concept is: there are two signals – the desired signal
and the reference ultrasound source signal. The
desired signal consists of reflections both from the
hand and from the environment. Using the reference
ultrasound signal, the algorithm removes/reduces
responses coming from the environment. The
assumption is made that the signals are uncorrelated.
The noise cancellation problem here is solved
using the QRD RLS Lattice in the error feedback
form with double precision arithmetic and EF. The
preference is given to this type of the algorithm due
to its convenience in implementation and its
computational speed. The algorithm can be derived
from the QRD algorithm (Kadlec, 1985). It uses QR
decomposition of the information matrix, which
ensures its numerical robustness (Kadlec, 1985;
Kadlec, 1986; Moonen, 1999). More detailed
information about the algorithm derivation can be
found in (Kadlec, 1985). However, a short
description of the most important equations is
provided here.
The derivation of Lattice algorithm is based on
the following equations multiplied with a data vector
(Kadlec, 1985):
𝜃
𝑁1
|
𝑛
𝜃
𝑁1
|
𝑛1
0
𝜃
𝑁1
|
𝑛
1
∙𝛬
𝑁1
|
𝑛
∙𝐾
𝑁1
|
𝑛
(1)
𝜃
𝑁1
|
𝑛
0
𝜃
𝑁1
|
𝑛
1
𝜃
𝑁1
|
𝑛1
∙𝛬
𝑁1
|
𝑛
∙𝐾
𝑁1
|
𝑛
(2)
𝜃
̅
𝑁1
|
𝑛
𝜃
𝑁1
|
𝑛1
𝑓
𝑜𝑟 𝑛
2,…,𝑁
(3)
Note that 𝜃
𝑁 1|𝑛 is a vector of
autoregression coefficients in forward direction;
𝜃
𝑁 1|𝑛 is a vector of autoregression
coefficients in backward direction calculated from
decomposition of matrix V(n+1);
𝜃
𝑁1
|
𝑛
is a vector of autoregression
coefficients in backward direction calculated from
decomposition of matrix V(n);
𝛬
𝑁|𝑛 are diagonal elements of matrix D in
matrix decomposition 𝑉
𝑛
𝑈𝑛∙𝐷𝑁∙
∙𝑈
𝑁, where U is an upper triangular matrix with
units on the main diagonal, D is a diagonal matrix
with positive elements on the main diagonal.
𝛬
𝑁1
|
𝑛
are scalars in N different
decompositions of 𝑉
𝑛1
𝐿
𝑛1
∙𝐷𝑛1∙𝐿
𝑛 1 , where L is a
low triangular matrix with units on the main
diagonal.
𝐾𝑁1|𝑛 are coefficients of response.
After this step, relations between prediction
(resp. filtration) errors in forward and backward
directions can be obtained. On the basis of these
variables, updating of parameters 𝛬
𝑁1
|
𝑛
,
𝛬𝑁1|𝑛, 𝐾𝑁 1|𝑛 is provided (Kadlec,
1985).
The relations for updates of the parameters
𝛬
𝑁1
|
𝑛
,𝛬𝑁 1|𝑛, 𝐾𝑁 1|𝑛 are the
following (Kadlec, 1985):
𝐾
𝑁1
|
𝑛
𝐾
𝑁1
|
𝑛
ℎ
𝑁1
|
𝑛
∙𝑒
𝑁1
|
𝑛1
1𝜉
𝑛1
(4)
𝐾
𝑁1
|
𝑛
𝛼
∙𝐾
𝑁1
|
𝑛
𝑓
𝑜𝑟 𝑛
1,2,…,𝑁
(5)
𝛬
̅
𝑁1
|
𝑛
𝛬
𝑁1
|
𝑛
ℎ
𝑁1
|
𝑛
1𝜉
𝑛1
(6)
𝛬
̅
𝑁1
|
𝑛
𝛬
𝑁1
|
𝑛
𝑒
𝑁1
|
𝑛
1𝜉
𝑛
(7)
𝛬
̅
𝑁1
|
𝑛
𝛼
∙𝛬
𝑁1
|
𝑛
𝑓
𝑜𝑟 𝑛0,1,…,𝑁
(8)
ℎ
𝑁1
|
𝑛
are prediction errors computed in
backward direction from decomposition of matrix
V(n);
𝑒𝑁1|𝑛 are prediction errors in forward
direction.
Let us remind also that for initialization step the
following equations are valid (Kadlec, 1985):
ℎ
𝑦
;𝑒
𝑦
; 𝜉
0
(9)
To update parameters (4)-(8), it is necessary to
know forward prediction errors 𝑒𝑁 1|𝑛 and
backward prediction errors ℎ
𝑁1
|
𝑛
. They are
defined as follows (Kadlec, 1985):
𝑒𝑁1|𝑛 𝑦
𝜃
𝑁 1|𝑛 ∙ 𝑍𝑛
(10)
ℎ
𝑁1
|
𝑛
𝜃
𝑁1
|
𝑛
,1
∙𝑍
𝑛
𝑦
𝜃
𝑁1
|
𝑛
∙𝑍𝑛1
(11)
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
696
The interaction between forward and backward
prediction errors of order n-1 and n without using
vectors 𝜃
𝑁 1|𝑛 , 𝜃
𝑁1
|
𝑛
is given by
equations (Kadlec, 1985):
𝑒
𝑁1
|
𝑛
𝑦
𝜃
𝑁1
|
𝑛
∙𝑍
𝑛
𝑒
𝑁1
|
𝑛1
𝐾
𝑁1
|
𝑛
∙𝛬
𝑁1
|
𝑛
(12)
∙ℎ
𝑁1
|
𝑛
𝑓
𝑜𝑟𝑛1,…,𝑁
where 𝑒
𝑦
.
ℎ
𝑁1
|
𝑛
𝜃
𝑁1
|
𝑛
,1
∙𝑍
𝑛
𝑦
𝜃
𝑁1
|
𝑛
∙𝑍
𝑛1
(13)
ℎ
𝑁1
|
𝑛2
𝑓
𝑜𝑟 𝑛1,…,𝑁
where ℎ
𝑁1
|
𝑛
are backward prediction errors
computed from decomposition of matrix V(n+1) and
ℎ
𝑦
.
ℎ
𝑁1
|
𝑛
ℎ
𝑁1
|
𝑛
𝐾
𝑁1
|
𝑛
∙
(14)
𝛬
𝑁1
|
𝑛1
∙𝑒
𝑁1
|
𝑛1
,𝑛
1,…,𝑁
where 𝑒
𝑦
.
Thus, equations (12)-(14) define prediction
errors 𝑒
𝑁1
|
𝑛
, ℎ
𝑁1
|
𝑛
, which are
necessary for updating parameters
𝛬
𝑁1
|
𝑛
,𝛬𝑁 1|𝑛, 𝐾𝑁 1|𝑛 according
to equations (4)-(8). It should be also noted that in
this case there is no need to update matrix V(n)
(Kadlec, 1985).
It is worth mentioning that the algorithm
computes all necessary parameters for calculating
probability density function 𝑝
𝑦
|
𝐷
𝑡1
;𝑛
(Kadlec, 1985).
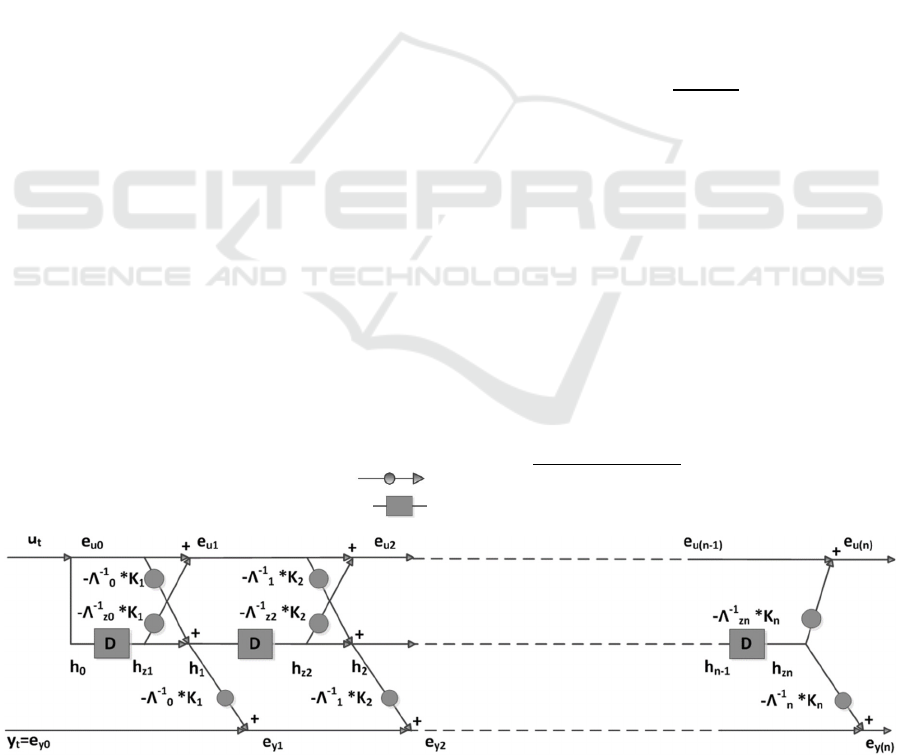
The structure of QRD RLS Lattice algorithm can
be shown in Fig. 1 (Kadlec, 1985), where
means multiplication with a constant and
stands for “memory cell”, with which help the
following equation is performed: ℎ
𝑁1
|
𝑛
ℎ𝑁1|𝑛1, where ℎ 𝑁 1|𝑛1 is from
the previous time step.
The previously described Lattice algorithm can
be changed to obtain filtration errors instead of
prediction errors. This change allows deriving the
normalized forms of the algorithms performing
computation in range (-1; 1) (Kadlec, 1985), which
decreases computation complexity and ensures
numerical stability of the algorithm. The more
detailed information see in (Kadlec, 1985).
The equations, which define relations between
filtration and prediction errors, are as follows
(Kadlec, 1985):
𝑒
̅
𝑁 1|𝑛 𝑒𝑁 1|𝑛∙ 1 𝜉
̅
𝑛
(15)
ℎ
𝑁 1|𝑛 ℎ
𝑁 1|𝑛 ∙ 1 𝜉
̅
𝑛1
(16)
It is also valid:
1𝜉
𝑛
1
1𝜉
̅
𝑛
(17)
The detailed description of derivation of the
equations can be found in (Kadlec, 1985).
It should also be mentioned that the QRD RLS
Lattice algorithm is suitable for incorporation of
hypothesis estimation. This is due to its modular
structure, where each module can perform the order
update. In its turn it allows obtaining estimations of
all orders during computation (Pohl et al., 2008).
The hypothesis probability updates are based on
the probabilistic theory and made as follows
(Kadlec, 1985; Kadlec, 1986; Peterka, 1981):
𝑝𝐻
𝐷
𝑡
𝑝
𝑦
𝑢
,𝐷
𝑡1
𝑝𝑦
𝑢
,𝐷
𝑡1
𝑝𝐻
𝐷
𝑡1
,
(18)
Figure 1: RLS QRD Lattice algorithm (Kadlec, 1985).
Hand Detection Algorithm: Pre-processing Stage
697
where 𝑦
are data observed at time t, D(t) and D(t-1)
are data previously observed from y
0
through y
t
and
y
t-1
respectively, u
t
is input, H
n
is a hypothesis of a
model order n. The term 𝑝
𝑦
|
𝑢
,𝐷𝑡1
is the
probabilistic description of the modelled system
with order given by hypothesis H
n
.
From equation (18) it is clear that there are two
stages of probability estimation. The first stage,
which is presented by the numerator in (18),
computes the order update. It means that the old
probability estimates are updated by new data during
the first stage. In the second stage, which is
presented by the denominator of (18), the
normalization of the updated order estimates is
performed. The second stage fulfils the forgetting of
hypothesis probability density function (Pohl et al.,
2008). These stages can be incorporated into the
QRD RLS Lattice algorithm.
It is obvious that to compute probability
estimates of the hypotheses, it is necessary to know
𝑝
𝑦
|
𝐷
𝑡1
,𝐻
, which is calculated as follows:
𝑝
𝑦
|
𝐷
𝑡1
; 𝐻
𝜋
∙
𝛬
𝛬
̅
∙
|
𝑉
𝑛
|
|
𝑉
𝑛
|
∙
∙
Г𝜗
̅
𝑛/21
Г𝜗 𝑛/2 1
(19)
where 𝛬 is the optimal solution error of the model
for hypothesis H, 𝑉𝑛 is an autocorrelation matrix,
Г is a gamma function, 𝜗 is the amount of data
accumulated in matrix 𝑉𝑛.
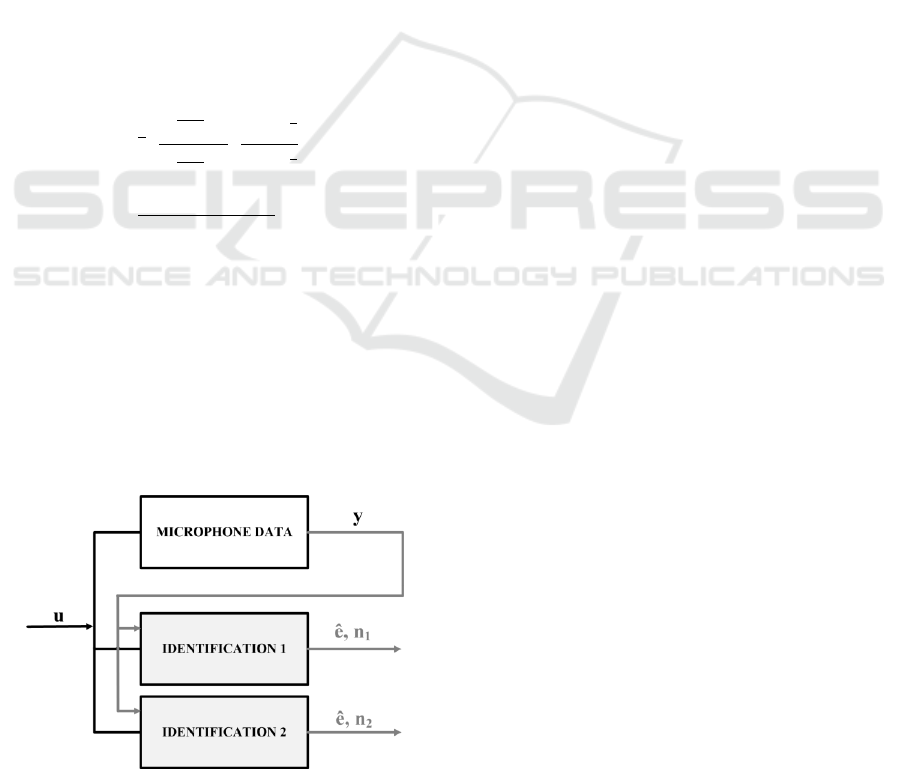
2.2 Real Data Experimental Approach
The block diagram presenting the basic concept of
the experiments with real ultrasound data is shown
in Fig. 2.
Figure 2: Block diagram.
The block diagram consists of three main parts:
o the block representing real data coming
from the microphones,
o two identification blocks standing for
regression models of two different orders.
The identification blocks are based on linear
finite impulse response (FIR) models (Moonen,
1999). They represent regression models of two
different orders, which allow hypothesis testing
implementation. All three parts have common input
u, which is modelled according to certain parameters
described in the next section. The identification
blocks estimate parameters of the hand model and
computes prediction and filtration errors. Moreover,
they estimate the order probability, which allows
detecting the hand appearance.
Thus, if there is no hand in front of the device,
the identification model with a smaller order will
have a higher probability; otherwise, the
identification model of a higher order will suit better
for the estimation process. Based on the outputs of
the order probability estimation, the hand presence
can be detected.
The ultrasound data applied in the experiments
were obtained from the ultrasound device developed
in UTIA. The device comprises three basic
components of the hardware platform represented by
TE0820 FPGA SoM module, TE0706 carrier board
and UTIA evBoard v1.7. The detailed information
about the device can be found in (Pohl & Kohout,
2019).
3 RESULTS
A series of experiments have been performed to
show functioning of the described approach. The
results of the experiments are thoroughly discussed
in this section.
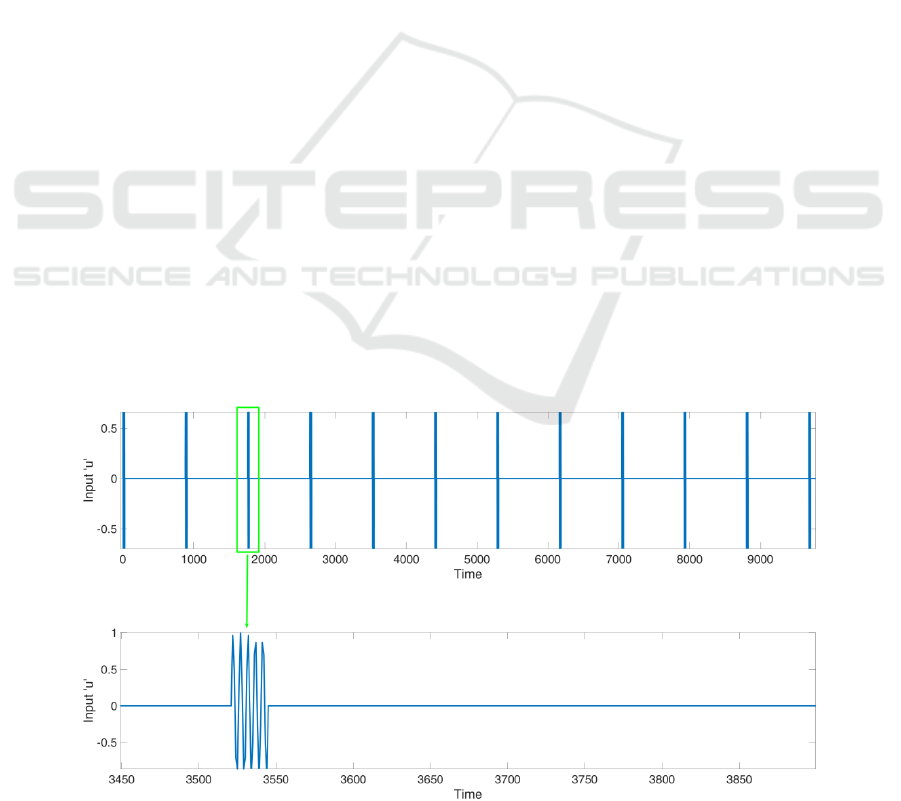
As it was pointed out in the previous section, the
real data used in the experiments are real ultrasound
data obtained from the ultrasound device. The input
signal provided by the ultrasound speaker is a set of
chirps represented by a sinusoid wave with a period
of 5 samples, a sampling frequency 192 kHz, and 880
samples space between them. For testing purposes,
the input signal was simulated considering all above
mentioned parameters and is shown in Fig. 3.
The output signal is obtained from 31
microphones situated on the ultrasound device. The
ultrasound speaker sends the signal 500 times on the
40 kHz frequency. Each signal has 880 samples. The
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
698
example of the output from one of the microphones
is shown in Fig. 4.
The highest peaks on the graph represent the
responses from the hand, while smaller peaks are
signals coming back from other objects in the
environment. The goal is to identify the hand with
the help of hypothesis testing algorithm described in
the previous sections.
As the first step, it is necessary to set orders for
two identification blocks as well as to choose the
optimal value of the EF factor.
After fulfilling a set of experiments, it was
proved that the optimal orders for two regression
models are n
1
=2000 and n
2
=100. The EF factor is set
equal to 0.9999, the time period is N=305500. The
results of identification process are shown in Fig. 5.
Figure 5 shows two graphs, which represent the
results of hypothesis testing algorithm in different
periods of identification process. The upper graph
shows the beginning of identification process, while
the graph on the bottom of the picture presents the
results, when the algorithm has already learnt to
identify parameters and order of the system correctly.
As it is clear from the picture, the red line stands
for the high order of the regression model, i.e.
n1=2000, while the green one is for the order
n2=100. In the beginning of identification process
the algorithm needs some time to start estimating
parameters in a right way, but after appx. 9000
samples the estimation process converges to correct
values and the algorithm functions precisely enough.
It should be noticed that when the hand appears, the
higher order system is considered to be more
appropriate for identification process, while in the
situation when there is no hand, the smaller order
system is preferred, which is represented by a green
line.
Based on the experiments, it can be concluded
that the algorithm using hypothesis testing functions
reliable and precisely enough and can be used for
solving a noise cancellation problem.
The time of computation considering N=305500
and the highest order n
1
=2000 is 81.0914 seconds,
which is not satisfactory if there is a need for a quick
real time data processing. Therefore, the algorithm
needs accelerating.
4 DISCUSSION
The experiments prove that the proposed approach
to system identification using QRD RLS Lattice
algorithm is promising and provide precise outputs.
One of the advantages of the approach is that the
optimal value of the EF factor can be chosen and set
permanently and it will not influence the results of
hand presence detection. However, to set the orders
of identification models, certain assumptions about
hand distance from the device should be made,
which can be taken as a limitation of the approach.
Based on the hypothesis order probability
estimation, the system can identify the hand
presence precisely. On the other hand, the
identification process needs a certain amount of time
to learn to converge to the right values, which is the
other limitation of the approach.
However, the results of the experiments are
promising and the further work is supposed to
elaborate the ways of accelerating the algorithm and
the ways of shortening its computation time.
Figure 3: Input signal.
Hand Detection Algorithm: Pre-processing Stage
699

Figure 4: Output signal.
Figure 5: Hand detection.
5 CONCLUSION
The present work presents a new approach to a hand
detection technique based on ultrasound technology.
The approach describes a pre-processing stage used
for a hand recognition algorithm. The algorithm
used in the work is QRD RLS Lattice algorithm with
double precision arithmetic and EF. The algorithm is
extended with the hypothesis order probability
estimation.
A series of experiments was performed with real
data from the ultrasound device. The experiments
show that the hand detection process is not very
sensitive on a choice of the EF factor. The results are
precise enough; however, to process data in real
time, the algorithm needs accelerating.
The final goal is the application for hand
detection, where the hand appears for a short period
of time at a certain distance from the ultrasound
source. The final version of the algorithm is
supposed to be implemented on Xilinx Zynq devices
operating in real time with a microphone and
ultrasound transducers. The final implementation is
supposed to benefit from FPGA structure and
pipeling technique to accelerate the computation
process.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
700

ACKNOWLEDGEMENTS
This work has been supported by the ECSEL JU
project SILENSE “(Ultra)Sound Interfaces and Low
Energy iNtegrated Sensors” Project No.: ECSEL JU
737487-8 and MSMT 8A17006 (Ministry of
Education Youth and Sports of the Czech Republic).
REFERENCES
Bottomley, G. E., Alexander, S. T. A novel approach for
stabilizing recursive least squares filters. IEEE
Transactions on Signal Processing, vol. 39, pp. 1770-
1779, 1991.
Cioffi, J., Kailath, T. Fast recursive-least-squares
transversal filters for adaptive filtering. IEEE
Transactions on Acoustics, Speech, and Signal
Processing, vol. 32, no. 2, pp. 304-337, 1984
Constantinides, G., Cheung, P. Y. K., Luk, W. Synthesis
and optimization of DSP algorithms. Kluwer,
Dordrecht, 2004.
Diniz, P. S. R. Adaptive filtering: algorithms and practical
implementation. Second edition, Kluwer Academic
Press, Norwell, MA, 2002.
Fang, F., Chen, T., Rutebnbar, R. A. Floating point bit-
width optimization for low-power signal processing
applications. Proc. Int. Conf. on Acoustics, Speech and
Signal Proc., vol. 3, pp. 3208-3211, 2002.
Kadlec, J. Continuous probabilistic identification of
autoregression model with unknown order. In:
Analýza, syntéza a rozpoznávání řeči, ČSVTS, Prague,
1985.
Kadlec, J. Probabilistic identification of regression model
in fixed point. Ph.D. thesis, UTIA CAS, Czech
Republic, September 1986.
Kadlec, J., Likhonina, R. Adaptive RLS algorithms
reference implementations (application note). UTIA,
2016.
Lee, D., Morf, M., Fridlander, B. Recursive least-squares
ladder estimation algorithms. IEEE Transactions on
Acoustics, Speech, and Signal Processing, vol. 29, no.
3, pp. 627-641, 1981.
Moonen, M. Introduction to adaptive signal processing. K.
U. Leuven, Leuven, Belgium, 1999.
Peterka, V. Bayesian approach to system identification. In:
Eykhoff, P. (Ed.), Trends and Progress in System
Identification. Pergamon Press, Oxford, pp. 239-304,
1981.
Pohl, Z., Tichy, M., Kadlec, J. Implementation of the
least-squares Lattice with order and forgetting factor
estimation for FPGA. EURASIP Journal on Advances
in Signal Processing, pp. 1-11, 2008.
Pohl, Z., Kohout, L. UTIA evaluation board v1.7-v1.8.
Beamforming demo (application note), UTIA AV CR,
v.v.i., 2019.
Pradipa, R., Kavith, S. Hand gesture recognition – analysis
of various techniques, methods and other algorithms.
International Conference on Innovations in
Engineering and Technology (ICIET’ 14). Available at
http://www.rroij.com/open-access/hand-gesture-
recognition--analysis-ofvarious-techniques-methods-
and-theiralgorithms.pdf
Premaratne, P. Human computer interaction using
hand gestures, cognitive science and technology.
DOI: 10.1007/978-981-4585-69-9_2, Springer
Science+Business Media Singapore, 2014
Regalia, P. A. Numerical stability properties of a
QR-based fast least squares algorithm. IEEE
Transactions on Signal Processing, vol. 41, no. 6,
pp. 2096-2109, 1993.
Hand Detection Algorithm: Pre-processing Stage
701
