
Deep Learning Algorithm for Object Detection with Depth Measurement
in Precision Agriculture
Aguirre Santiago, Leonardo Solaque and Alexandra Velasco
Department of Engineering, Universidad Militar Nueva Granada, Bogot, Colombia
Keywords:
GPU, Object Detection, Deep Learning, Depth Measurement, Point Cloud, Agricultural Robot.
Abstract:
Autonomous driving in precision agriculture will have an important impact for the field. This is why several
efforts have been done in this direction. We have developed an agricultural robotic platform named CERES,
which has a payload of 100 Kg of solid fertilizer, 20 liters for fumigating purposes, and a weeding system.
Our research points to make this robot autonomous. In this paper, we propose a method, based on deep
learning algorithms, to combine object detection with depth measurements for object tracking and decision
making of an agro-robot. For this, we combine an object detection algorithm carried out with YOLOv2 and a
depth measurement strategy implemented with a ZED Camera. The main purpose is to determine the distance
to the obstacles, mainly people, because we require to prevent collisions and damages either for people and
for the robot. We have chosen to detect people because, in the desired environment, these are frequent and
unpredictable obstacles, and the risk of collision may be high.We use a host computer, achieving a detection
network with an average accuracy of up to 72% in detecting the class Person. While using a NVIDIA Jetson
TX1, the accuracy increases up to 84% due to the powerful dedicated GPU destined to process Convolutional
Neural Networks(CNN).
1 INTRODUCTION
Machine learning has recently gained much attention
due to several possible applications such as (Chlin-
garyan et al., 2018),(Shin et al., 2020), and (Espejo-
Garcia et al., 2018). One of these applications is com-
puter vision. In this field, object detection is useful
in areas of study as medicine (e.g. (Li et al., 2019),
(Zhou et al., 2019) (Chua et al., 2019)), autonomous
driving (e.g. (Fujiyoshi et al., 2019), (Chen et al.,
2018)), and precision agriculture (e.g. (Patrcio and
Rieder, 2018), (Partel et al., 2019)), among others.
Several machine learning techniques for object
detection have been already developed with good re-
sults. For example, a method based on deep convolu-
tion neural networks, released in 2014 is the Region-
based Convolutional Network (R-CNN) (Wu et al.,
2020). Since then, there have been improvements to
this technique, e.g. Fast R-CNN (Girshick, 2015), and
Faster R-CNN. (Ren et al., 2015). Other detection
networks, such as YOLO (YouOnlyLookOnce) (Red-
mon and Farhadi, 2017) can be also used with similar
purposes, i.e. object detection. For further informa-
tion on this topic, the reader is encouraged to review
(Wu et al., 2020).
On the other hand, depth measurement is an ex-
tra variable that can be obtained by different methods
and using environments such as the ones presented in
(Silva et al., 2020), (Kopp et al., 2019), and (Breton
Figure 1: CERES robot: Agricultural robotic platform elec-
trically powered with two brushless motors liquid-cooled
(each motor is 5KW) attached to a gearbox 50:1 these are
coupled to a car wheel of a common rin 14. CERES has
a payload of 100 Kg of solid fertilizer, 20 liters for fumi-
gating purposes and a weeding system. For the high-level
processes, CERES uses a 9 DOF IMU, a LIDAR and stereo
cameras are integrated.
490
Santiago, A., Solaque, L. and Velasco, A.
Deep Learning Algorithm for Object Detection with Depth Measurement in Precision Agriculture.
DOI: 10.5220/0009869404900497
In Proceedings of the 17th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2020), pages 490-497
ISBN: 978-989-758-442-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

et al., 2019), just to name a few.
In fields like autonomous driving, to make deci-
sions during a trajectory execution, the system re-
quires obstacle detection. From obstacle detection,
it may be possible to obtain other information like
depth, which is useful for recalculating the trajectory.
In this work, we tackle the topic of autonomous driv-
ing in precision agriculture. We are particularly inter-
ested in object detection with depth measurement for
obstacle avoidance and decision making. Therefore,
we propose a method to combine an object detection
algorithm with depth measurement at the same time.
This method will be applied to the CERES Agrobot,
shown in Fig. 1. The idea is to use both obstacle
detection and depth measurements in the robot navi-
gation for decision making to prevent collisions and
damages to the robot and to people that could interact
somehow with the robot.
In the literature, there are several solutions to the
problem of object detection, and in some cases, also
depth measurement is presented, with different tar-
gets. For example, regarding the autonomous robot
for agriculture in (Sadgrove et al., 2018), authors pro-
pose a cascading algorithm for fast feature extrac-
tion and object classification, resulting in an object
detection algorithm. Moreover, related to Intelligent
Transportation Systems, in (Hendry and Chen, 2019)
an Automatic License Plate Recognition is presented,
which consists of four steps, i.e. image collection,
object detection, segmentation, and optical character
recognition. For this application, authors use a re-
duced version of the first release of YOLO network
(Redmon and Farhadi, 2017). However, to increase
the precision accuracy a filter is required. A further
application of object detection algorithms is the hu-
man action recognition to detect motion proposed by
(Shinde et al., 2018), where the authors use the first
release of YOLO to analyze human actions, but au-
thors do not provide depth measurement. Regarding
depth measurement, there are several techniques that
allow good results (see e.g. (Zhao et al., 2017), (Li
et al., 2018), and (Reiss et al., 2014)). Depth in-
formation can be extracted, for example, from two-
dimensional data as in (Ban and Lee, 2020), where
authors propose a method for obtaining important fea-
tures of a depth image analyzing inherent feature that
represents three-dimensional protuberance by using
only two-dimensional distance information estimat-
ing details of a scene as a visual detection application.
In some fields like agriculture, it is necessary to
have either the information of object detection and
depth measurements for applications like autonomous
driving. To make decisions, we need to know whether
there is an obstacle, and its distance to the robot, e.g.
to avoid the obstacle and to re-plan a trajectory. One
way to solve both problems at the same time, either
obstacle detection, and depth measurement is by po-
sition tracking. For instance, in (Hu et al., 2018) a the-
oretical control scheme for robust position tracking of
a helicopter is proposed, but it needs to be tested on
an experimental system.
Object detection and depth measurement may al-
low to solve similar problems. For example, the ob-
ject tracking problem in one hand can be achieved
by analyzing the depth, measured by a LiDAR sen-
sor (Gong et al., 2020). On the other hand, the same
problem can be solved by training a detection Net-
work such as YOLO and analyzing the changes in the
generated detection (Ciaparrone et al., 2020).
In this paper, we propose a method to combine
object detection with depth measurements for ob-
ject tracking and decision making of an agro-robot.
For this, we combine an object detection algorithm
carried out with YOLOv2 and a depth measurement
strategy implemented with a ZED Camera. Fig. 2
illustrates the implemented strategy using the ZED
SDK camera for image acquisition, followed by the
image processing carried out using OpenCV library
(Bradski, 2000). Then, with Matlab, we generate a
static library with the GPU coder, to build the whole
algorithm on ROS (Robot Operating System), and
embedding the solution in a quad-core ARM Cortex-
A57, 4GB LPDDR4 and integrated 256-core Maxwell
GPU, Nvidia Jetson Tx1 module. The host com-
puter is an Intel Core i5-7200 with 2 GB NVIDIA
Geforce MX940 GPU. The main idea of our work
is to determine the distance to the obstacles, mainly
people, because we require to preserve either per-
sons’ and our CERES agricultural robot’s integrity,
for which we use a deep learning strategy combined
with depth measurement to re-plan the trajectory. We
have chosen to detect people because, in the desired
environment, these are frequent and unpredictable ob-
stacles, and the risk of collision is high. Here we
address the strategy to detect the object and its dis-
tance to the robot, while the trajectory planning is
not part of this paper. Using the host computer, we
achieve a detection network with an average accuracy
of up to 72% detecting the class ”Person”. The depth
measurements not acquired with this host computer.
Moreover, using a NVIDIA Jetson Tx1 supercom-
puter module, we obtained an accuracy of up to 84%
detecting the the class Person. In this case, regarding
depth measurement, we can detect objects in a range
from 0.5 m up to 8m with an error around 3%, which
gives us the capacity of re-planning the trajectory.
In section 2 we present the complete strategy for
object detection using depth measurements as well.
Deep Learning Algorithm for Object Detection with Depth Measurement in Precision Agriculture
491

The people detector training process, using YOLOv2
network, is fully described. Section 3 presents the
implementation of our strategy on the NVIDIA Jetson
Supercomputer. We analyze the results in section 4,
and we give some conclusions and recommendations
in section 5.
2 OBJECT DETECTION
STRATEGY COMBINED WITH
DEPTH MEASUREMENT
In this section, we describe the strategy used to de-
tect an object and determine its distance to the robot.
To do this, we trained the YOLOv2 detection network
(Redmon and Farhadi, 2017) and then, we are able to
define the distance between the camera and the ob-
ject. The used network works with a single neural
network applied to the full image, which divides the
image into regions and predicts bounding boxes. The
latter is used to perform depth measurement tasks.
The architecture of the YOLOv2 network consists of
24 layers. The input layer uses a RGB image, while
the output layer has 4 anchors, for more information
about this detection network the reader can refer to
(Redmon and Farhadi, 2017)
1
.
For the purpose of our work, we trained the net-
work to detect people using the INRIA person dataset
(Taiana et al., 2013) and the PennFudanPed dataset
(Ciaparrone et al., 2020). The former dataset contains
a train set with 614 positive images, while the test set
has 288 positive images (Ding and Xiao, 2012). The
latter dataset contains a train set of 170 positive im-
ages. Both datasets have a complex background with
a remarkable light change. Several features are con-
sidered, so both datasets are very useful for the pur-
poses of this work.
2.1 People Detector Training Process
People detection algorithms have many applications
such as in autonomous driving. For example, com-
panies like Tesla, Apple, Toyota, Nissan, etc., use
them to avoid collisions during a course (Wang et al.,
2020). As mentioned before, we are interested in
avoiding people to preserve their integrity as well as
the integrity of CERES agricultural robot. For this,
we detect the class person by training the YoloV2 de-
tection network. The process followed is illustrated in
Fig. 3. The first step includes the selection of a con-
volutional neural network (CNN) to edit the architec-
ture and rebuild it as a Yolov2 sub-detection Network.
1
https://pjreddie.com/darknet/yolov2/
Then, the second step is to select a strong dataset to
train the detection network. In this case, as we al-
ready explained, we used two datasets which together
contain 884 images. Finally, the third step is to set
the training options based on the capacity of the host
Computer, which in this case is the Intel Corei5-7200
with 2GB NVIDIA Geforce MX940 GPU. Then, we
label all the images using the Image Labeler applica-
tion provided by Matlab. Finally, we can train and test
the detection network.
2.2 Depth Acquisition
In this paper the algorithms are developed using a su-
percomputer NVIDIA Jetson TX1 with Jetpack 3.3
OS, as well as ROS and the ZED SDK (Developer
kit). To measure the distance to the obstacle, we chose
a ZED stereo camera which uses triangulation and 3D
sensors to estimate the depth from the disparity im-
age. Fig. 4, presents the flowchart of the strategy
built on ROS. To combine object detection with depth
measurement, the algorithm has four nodes, each of
which has a specific task.
The ZED-NODE is in charged of the depth data
acquisition, provided by StereoLabs
2
. This is a node
with many topics, but we use just two, i.e. an im-
age publisher that contains a BGR image of 1280x720
pixels, and a depth image publisher, with the infor-
mation of 921600 depth measurements, one per pixel.
This matrix is a numeric array of float data in meters.
Referring to Fig. 4, the ZED NODE, the ZED-GPU
detection Node and the Depth Measurement Node
were programmed in C++ while the OpenCV Node
uses Phyton 3.6.
3 IMPLEMENTATION
In this section we show the process to embed the ap-
plication into the NVIDIA Jetson Tx1. The process
consists of three steps. The initial step is to generate
a static library compatible with the GPU. The second
step is to generate the ROS architecture shown in Fig.
4; this architecture consists of four nodes, of which
3 are used in this step; these are the depth acquisi-
tion ”ZED Node” , the detection ”Detection Node”,
and the image processing ”OpenCV Node”. The third
step includes the fourth node, i.e. the ”Depth Mea-
surement NODE”. Here we combine detection with
depth measurement.
2
https://www.stereolabs.com/
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
492
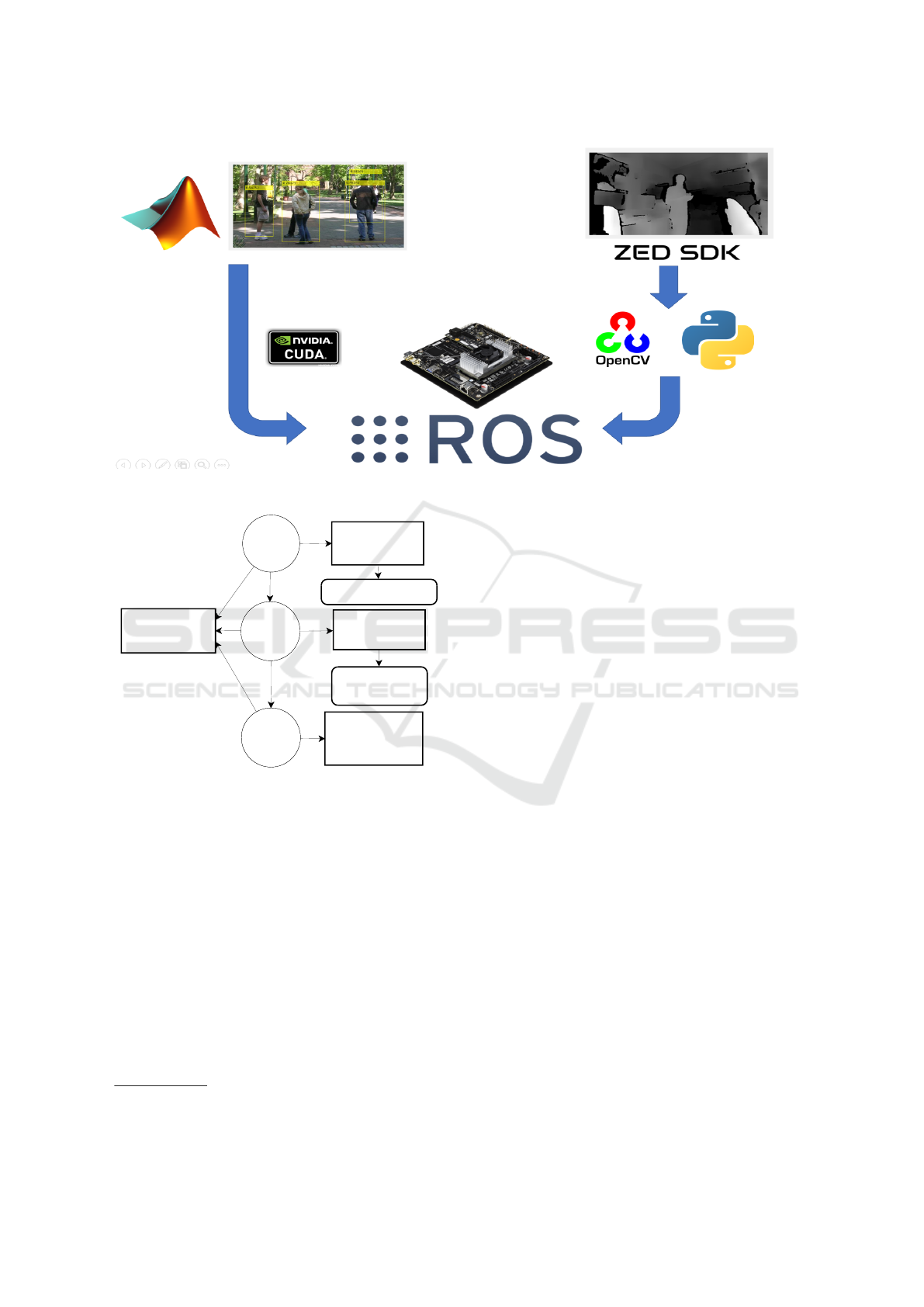
Figure 2: Object detection strategy combined with depth measurement.
A
CNN
Selection
MobilinetV2
Dataset
Selection
INIRIA
CNN Edition
884
Labeled images
Setting
Options
B
C
Learning Rate
Mini-batch
Number of Epoch
Sub detection network
Yolov2
Training model
[X,Y,weith,height]
Image Location
Figure 3: Flowchart to train YoloV2 detection network to
detect the class person.
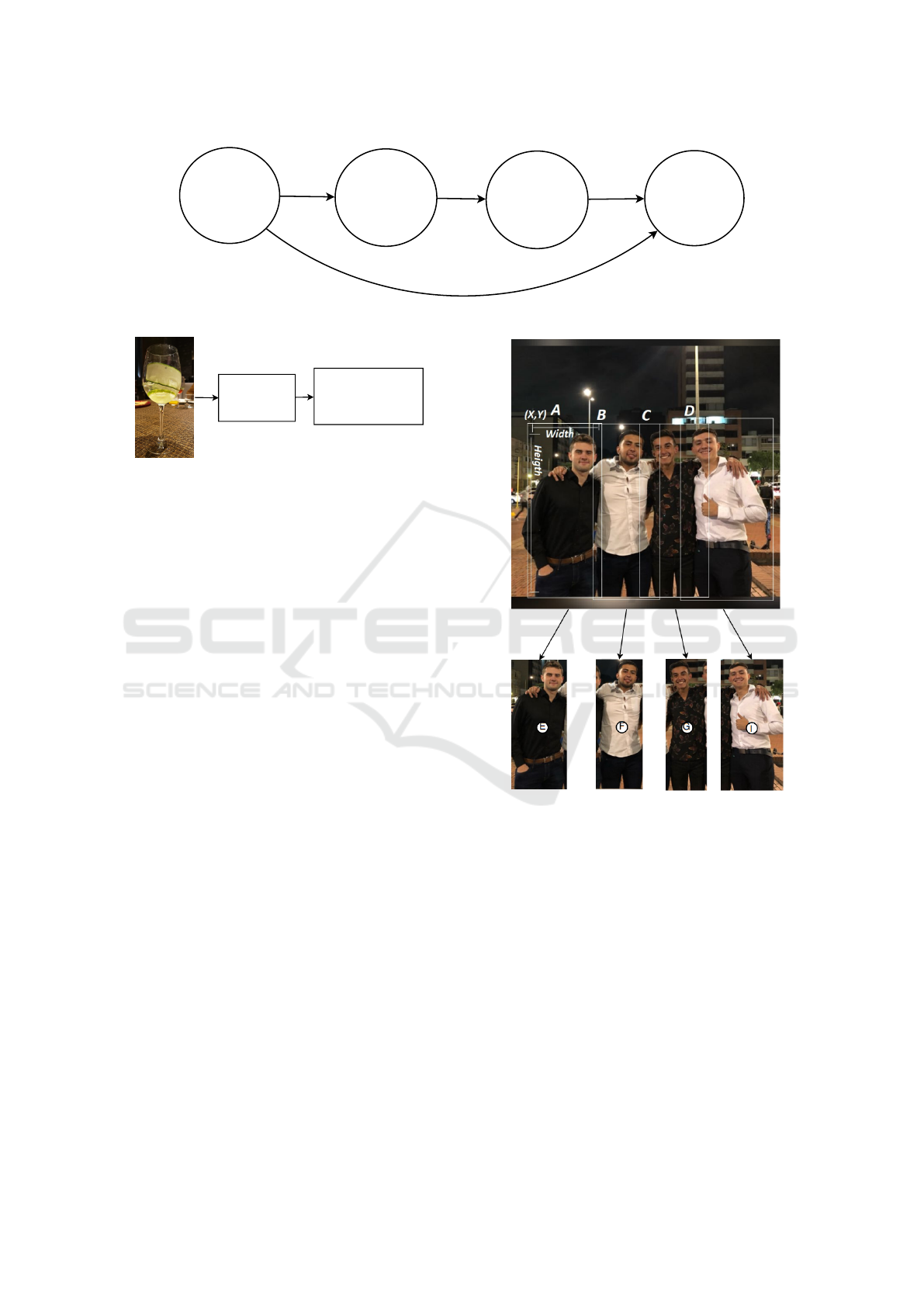
3.1 Static Library
We use the GPU coder in Matlab to generate a static
library in the Jetson TX1. This library contains the
object detector shown already in section 2. We built
the static library based on a detection function, whose
input is an image and the output are the bounding
boxes, as presented in Fig. 5.
In addition, we use the cuBLAS
3
library which is
an implementation of the Basic Linear Algebra Sub-
programs (BLAS). This library lets us access to the
computational resources of the NVIDIA Jetson TX1
supercomputer. We use as well the cuDNN
4
library
(Chetlur et al., 2014), which is a GPU-accelerated li-
3
https://developer.nvidia.com/cublas Cublas
4
https://developer.nvidia.com/cuDNN cuDNN
brary for Deep Neural Networks (DNN). This library
provides highly tuned implementations of common
layer operations such as forward and backward con-
volution, pooling, normalization, and activation lay-
ers using the high performance of the Jetson TX1
module. Both, cuBLAS and cuDNN libraries are pro-
vided by NVIDIA with the purpose of optimizing the
detection process and allowing to take advantage of
the GPU. The detection library was configured to pro-
cess an input image (1280x720 RGB column major
image), as described in section 2.2. The ZED node
publishes a 1280x720 BGR image. The OpenCV
Node, converts the image into the format required by
this library. After the detection process, the library
returns the bounding boxes (bboxes) according to the
detection process. These bboxes contain the informa-
tion of the detected objects, which is presented in 4
variables, namely [X, Y, Width, Height].
The detection library was configured to process an
input image (1280x720 RGB column major image),
as described in section 2.2. The ZED node publishes
a 1280x720 BGR image. The OpenCV Node, con-
verts the image into the format required by this li-
brary. Then, it returns the bounding boxes (bboxes)
according to the detection process. These bboxes con-
tain the information of the detected objects, which is
presented in 4 variables, namely
3.2 Image Processing
In this work we process the input image twice. First,
in OpenCV, as shown in Fig. 4. The ZED-GPU DE-
TECTION NODE receives a RGB image but the ZED
NODE, publishes BGR images. For this reason we
Deep Learning Algorithm for Object Detection with Depth Measurement in Precision Agriculture
493
ZED
NODE
Depth
Measure
NODE
OpenCV
Node
ZED-GPU
DETECTION
NODE
Image
brg8
Image
rgb8
Bounding
Boxes
Depth Image
Figure 4: ROS diagram for depth measure.
Detection
funciton
Bounding
Boxes
(X,Y,width,height)
Figure 5: Proposed function to generate the static library.
propose another node to process the image to con-
vert it into a RGB image. This reformatting process
was done to avoid the deep neural network to be cor-
rupted due to the color changing, which would result
in a failure of the object detection. The second im-
age processing was done to reformat this new RGB
image (row major format) into an RGB (column ma-
jor) image. This process is done because the static
library needs an image formatted as 720x1280, while
the ZED-NODE publishes it is 1280x720. Sending
the wrong dimensions will not allow the algorithm to
work properly.
3.2.1 Combining Object Detection with Depth
Measurement
After processing the images, we carry out the ob-
ject detection using the detection network presented
in section 2, with the function structure illustrated in
Fig. 5, and the static library proposed in section 3.1
using the NVIDIA Jetson TX1. This process is done
on the ZED DETECTION NODE. The outputs of this
node are the detected bounding boxes as Regions Of
Interest (ROI) messages which consist of four data (X,
Y, width, height). For example, in Fig. 6, the ROI
message is printed. A,B,C and D are plots of the ROI
messages given by the detection node. The combi-
nation method uses the ROI messages to set them as
the dimensions of a new small image. Let us define
the width and height of the new image, respectively as
Im
w
and Im
h
, then these dimensions can be obtained
Im
w
= X +W (1)
Im
h
= Y + H (2)
Figure 6: Image segmentation for depth measurement.
where X, Y , refer respectively to the (X,Y) coordinate
in the original image, as it can be seen in Fig.6, and
W , H are the width and height of the same image.
Then, we measure the depth at the center of these new
images, i.e. we obtain the depth of the points E,F,G
and I, shown in Fig.6. This measurement corresponds
to the distance between the detected person and the
camera.
Once we segment the image with the ROI mes-
sages generated from the ”DETECTION NODE”, we
receive and unpack the depth measurement subscrib-
ing the Depth measurement NODE to a depth topic
of the ZED NODE. The distance is obtained in me-
ters. At this point in the Depth measurement NODE
there is a vector from the image depth topic of the
distance of every single pixel and the ROI messages
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
494
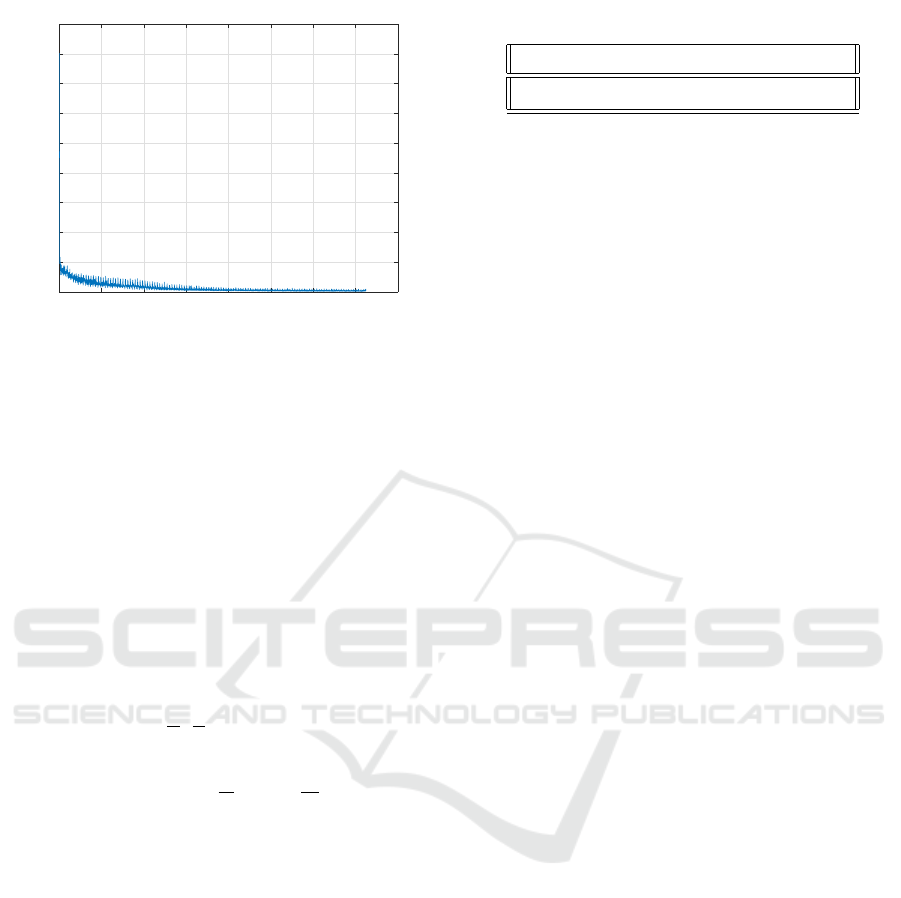
0 500 1000 1500 2000 2500 3000 3500 4000
Number of Iterations
0
5
10
15
20
25
30
35
40
45
Training Loss for Each Iteration
Figure 7: Training loss graph.
for the image segmentation. Finally, we use the linear
indexing L
i
to find the pixel desired position on the
image representation, which means that we can refer
to the elements of a matrix with a single subscript. In
general, L
i
is defined as
L
i
= W ∗ (C − 1) + R , (3)
where C and R are the desired column and row of the
matrix that represents the image.
The important depth data for us is located in the
middle of the new image result of the segmentation
process described before. For this reason, we select
the center pixel of the image through using (3), con-
sidering the pixel in the center of the image which is
located at the point(
W
2
,
H
2
). Then, the linear index of
the center pixel can be determined as
L
i
= W ∗ (C −
H
2
) + R −
W
2
. (4)
4 RESULTS AND ANALYSIS
The training process with the INRIA and the PennFu-
danPed dataset lasted 90 minutes, using the host com-
puter Intel corei5-7200 with 2 GB NVIDIA Geforce
MX940. In Fig. 7 the training loss in the process
is shown. The process consisted on 125 epochs, per-
forming 3625 iterations, with a 30 Mini-batch size.
We carried out a validation test of the detection
network, using the INRIA test set which contains 288
test images. In Table 1 we show the amount of data
used for each training step. The tests consisted of the
detection process of an image test set. The results of
the detector, the scores, and the bounding boxes per
image are compared with the ground truth proposed
for the test set. The ground truth is a table with infor-
mation about the location of the image on the com-
puter where the test takes place and the bboxes of each
Table 1: Number of images per class.
Class Train Val Trainval Test
Person 614 170 784 288
image. According to the amount of data used to train
the detector, we achieved an average precision of 72%
in the host computer, and 84% in the NVIDIA Jetson
Tx1.
The results of accuracy in detecting people, us-
ing the host computer and using the NVIDIA Jetson
Tx1, are respectively presented in Figs.8 and 9. Fig.
9 shows the action of the cuBlas and cuDNN libraries
which increases the detection accuracy in 12% on the
Jetson with respect to the host computer.
During the experimentation process, we used a
60% threshold like the confidence of the network de-
tection. It is worth mentioning that the stability of the
camera is a crucial factor in the detection process, be-
cause with small disturbances the detection results in
the sequence of images are noisy, so it is not useful.
This issue is going to be solved in the next step of the
project using a stabilizer system witch main purpose
is to reduce the vibrations caused by robot displace-
ment.
The robot platform in which this method will be
implemented is the CERES agrobot shown in the
Fig.1.The maximum speed reached by the system is
22.2 m/s, and its average speed during the experimen-
tal phase is 1.4 m/s. On the other hand, the detection
average time is 0.21 s per image, and in order to make
maneuvers or stop the platform, the stabilization time
of the control system is around 2s, for this reason, the
use of parallel computers is a solution to release the
robot control system processor. This result implies
that a robot as CERES can react to avoid collisions
(3.5m is a safe distance for people from the robot,
whilst only the system vision works, but the robot has
other sensors that make safe its operation). For the
purpose of our agricultural robot, decision making is
possible to avoid damages to the robot and indeed to
people or other objects that could appear suddenly as
obstacles. However, it is imperative to find a solution
to the stability in the detection process.
Regarding depth measurements, we compared
practical real measurements with the results obtained
from the data acquired. Fig. 10 illustrates the test car-
ried out. It consisted on comparing the distance from
the camera to three different objects placed at fixed
known distances, at points A,B,C. We carried out 5
trials, with 3 different objects placed each time at a
different point. For each trial we obtained the depth
measurement using the Depth Measurement NODE
of the algorithm. We compared the real measurement
Deep Learning Algorithm for Object Detection with Depth Measurement in Precision Agriculture
495

Figure 8: Average Precision of the detector using the Host
Computer.
Figure 9: Average Precision of the detector using the
NVIDIA Jetson module.
with the experimental measurement to evaluate the
method. In this way, we obtain an average accuracy of
91%. In addition, the working range of the ZED cam-
era is between 0.5m to 20m, and the test has evaluated
the accuracy of the measurements in this interval.
A
B
C
1.5m
2.12m
2.12m
Figure 10: Depth measure test method.
5 CONCLUDING REMARKS
In this paper, we have proposed a to combine object
detection with depth measurements for object track-
ing and decision making, for the agricultural robot
CERES. In this case, we have used deep learning
techniques with this purpose. Using a host computer,
we achieve a detection network with an average ac-
curacy of up to 72% in detecting the class ”Person”,
while using a supercomputer Jetson, the accuracy in-
creases up to 84%. The detection time is 0.21 s. These
results are useful for our study because we can detect
obstacles to prevent collisions and consequent dam-
ages to the robot and people. Furthermore, in our
case, the vegetable farming process has beds (where
the plants are sown) with 1m of wide x 50m of long,
and furrows of 0.5m (where the robot tires can roll),
thus we can accept that the decision making process
can be carried out respecting to the mechanical sys-
tem response (remember that the response time of the
robot is about 2s), given that the robot’s average speed
is at least 1.4m/s.
In future studies, we plan to train the detection
algorithm with agricultural classes, such as under-
growth, flowers, plants, etc. not only to detect obsta-
cles but also to help the robot to carry out the specific
tasks efficiently.
ACKNOWLEDGEMENTS
This work is supported by the project INV ING 3185
Sistema de toma de decisiones para la aplicacin
de medidas correctivas que ayuden a mantener la
salud de un cultivo de hortalizas utilizando un robot
(CERES) dedicado a labores de agricultura financed
by the Universidad Militar Nueva Granada in Bogot-
Colombia.
REFERENCES
Ban, Y. and Lee, S. (2020). Protuberance of depth : De-
tecting interest points from a depth image. Computer
Vision and Image Understanding, page 102927.
Bradski, G. (2000). The OpenCV Library. Dr. Dobb’s Jour-
nal of Software Tools.
Breton, S., Quantin-Nataf, C., Bodin, T., Loizeau, D., Volat,
M., and Lozach, L. (2019). Semi-automated crater
depth measurements. MethodsX, 6:2293 – 2304.
Chen, Y., Zhao, D., Lv, L., and Zhang, Q. (2018). Multi-
task learning for dangerous object detection in au-
tonomous driving. Information Sciences, 432:559 –
571.
Chetlur, S., Woolley, C., Vandermersch, P., Cohen, J.,
Tran, J., Catanzaro, B., and Shelhamer, E. (2014).
cudnn: Efficient primitives for deep learning. CoRR,
abs/1410.0759.
Chlingaryan, A., Sukkarieh, S., and Whelan, B. (2018). Ma-
chine learning approaches for crop yield prediction
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
496

and nitrogen status estimation in precision agriculture:
A review. Computers and Electronics in Agriculture,
151:61 – 69.
Chua, S. N. D., Lim, S. F., Lai, S. N., and Chang,
T. K. (2019). Development of a child detection sys-
tem with artificial intelligence using object detection
method. Journal of Electrical Engineering & Tech-
nology, 14(6):2523–2529.
Ciaparrone, G., Snchez, F. L., Tabik, S., Troiano, L., Tagli-
aferri, R., and Herrera, F. (2020). Deep learning in
video multi-object tracking: A survey. Neurocomput-
ing, 381:61 – 88.
Ding, Y. and Xiao, J. (2012). Contextual boost for pedes-
trian detection. In 2012 IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 2895–
2902.
Espejo-Garcia, B., Martinez-Guanter, J., Prez-Ruiz, M.,
Lopez-Pellicer, F. J., and Zarazaga-Soria, F. J. (2018).
Machine learning for automatic rule classification of
agricultural regulations: A case study in spain. Com-
puters and Electronics in Agriculture, 150:343 – 352.
Fujiyoshi, H., Hirakawa, T., and Yamashita, T. (2019). Deep
learning-based image recognition for autonomous
driving. IATSS Research, 43(4):244 – 252.
Girshick, R. (2015). Fast r-cnn. In 2015 IEEE International
Conference on Computer Vision (ICCV), pages 1440–
1448.
Gong, Z., Lin, H., Zhang, D., Luo, Z., Zelek, J., Chen,
Y., Nurunnabi, A., Wang, C., and Li, J. (2020). A
frustum-based probabilistic framework for 3d object
detection by fusion of lidar and camera data. IS-
PRS Journal of Photogrammetry and Remote Sensing,
159:90 – 100.
Hendry and Chen, R.-C. (2019). Automatic license plate
recognition via sliding-window darknet-yolo deep
learning. Image and Vision Computing, 87:47 – 56.
Hu, J., Huang, J., Gao, Z., and Gu, H. (2018). Position
tracking control of a helicopter in ground effect us-
ing nonlinear disturbance observer-based incremental
backstepping approach. Aerospace Science and Tech-
nology, 81:167 – 178.
Kopp, M., Tuo, Y., and Disse, M. (2019). Fully automated
snow depth measurements from time-lapse images ap-
plying a convolutional neural network. Science of The
Total Environment, 697:134213.
Li, X., Zeng, Z., Shen, J., Zhang, C., and Zhao, Y. (2018).
Rectification of depth measurement using pulsed ther-
mography with logarithmic peak second derivative
method. Infrared Physics & Technology, 89:1 – 7.
Li, Z., Dong, M., Wen, S., Hu, X., Zhou, P., and Zeng, Z.
(2019). Clu-cnns: Object detection for medical im-
ages. Neurocomputing, 350:53 – 59.
Partel, V., Kakarla, S. C., and Ampatzidis, Y. (2019). Devel-
opment and evaluation of a low-cost and smart tech-
nology for precision weed management utilizing arti-
ficial intelligence. Computers and Electronics in Agri-
culture, 157:339 – 350.
Patrcio, D. I. and Rieder, R. (2018). Computer vision and
artificial intelligence in precision agriculture for grain
crops: A systematic review. Computers and Electron-
ics in Agriculture, 153:69 – 81.
Redmon, J. and Farhadi, A. (2017). Yolo9000: Better,
faster, stronger. In 2017 IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
6517–6525.
Reiss, D., Hoekzema, N., and Stenzel, O. (2014). Dust
deflation by dust devils on mars derived from opti-
cal depth measurements using the shadow method in
hirise images. Planetary and Space Science, 93-94:54
– 64.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Cortes, C., Lawrence, N. D.,
Lee, D. D., Sugiyama, M., and Garnett, R., editors,
Advances in Neural Information Processing Systems
28, pages 91–99. Curran Associates, Inc.
Sadgrove, E. J., Falzon, G., Miron, D., and Lamb,
D. W. (2018). Real-time object detection in agricul-
tural/remote environments using the multiple-expert
colour feature extreme learning machine (mec-elm).
Computers in Industry, 98:183 – 191.
Shin, J.-Y., Kim, K. R., and Ha, J.-C. (2020). Seasonal fore-
casting of daily mean air temperatures using a coupled
global climate model and machine learning algorithm
for field-scale agricultural management. Agricultural
and Forest Meteorology, 281:107858.
Shinde, S., Kothari, A., and Gupta, V. (2018). Yolo based
human action recognition and localization. Proce-
dia Computer Science, 133:831 – 838. International
Conference on Robotics and Smart Manufacturing
(RoSMa2018).
Silva, J. V., de Castro, C. G. G., Passarelli, C., Espinoza,
D. C., Cassiano, M. M., Raulin, J.-P., and Valio, A.
(2020). Optical depth measurements at 45 and 90
ghz in casleo. Journal of Atmospheric and Solar-
Terrestrial Physics, 199:105214.
Taiana, M., Nascimento, J. C., and Bernardino, A. (2013).
An improved labelling for the inria person data set for
pedestrian detection. In Sanches, J. M., Mic
´
o, L.,
and Cardoso, J. S., editors, Pattern Recognition and
Image Analysis, pages 286–295, Berlin, Heidelberg.
Springer Berlin Heidelberg.
Wang, L., Fan, X., Chen, J., Cheng, J., Tan, J., and Ma, X.
(2020). 3d object detection based on sparse convolu-
tion neural network and feature fusion for autonomous
driving in smart cities. Sustainable Cities and Society,
54:102002.
Wu, X., Sahoo, D., and Hoi, S. C. (2020). Recent advances
in deep learning for object detection. Neurocomput-
ing.
Zhao, Y., Mehnen, J., Sirikham, A., and Roy, R. (2017).
A novel defect depth measurement method based on
nonlinear system identification for pulsed thermo-
graphic inspection. Mechanical Systems and Signal
Processing, 85:382 – 395.
Zhou, T., Ruan, S., and Canu, S. (2019). A review: Deep
learning for medical image segmentation using multi-
modality fusion. Array, 3-4:100004.
Deep Learning Algorithm for Object Detection with Depth Measurement in Precision Agriculture
497
